isi hidraulik
TRANSCRIPT
BAB IPENDAHULUAN
1.1 Latar Belakang Masalah
Mesin Press Brake digunakan untuk menekuk atau membendingplat logam dengan sudut tertentu (biasanya 90 derajat).[1]
Mesin ini banyak digunakan di industri karoseri (body,chassis, bak truk dll.), pembuatan box (panel listrik, rumahlampu, safety box, lift, silent box dll.), pembuatan kitchenset, dll.
Mesin Press Brake dari Tenaga yang digunakan umumnya terbagimenjadi 2 bagian
1. Mesin Tekuk Plat Manual : Mesin ini menggunakantenaga manusia yang dibantu dengan bandul pemberat. Mesin initidak menggunakan sumber daya listrik sedikitpun murnimenggunakan tenaga manusia. Kelebihan mesin ini adalah murahdan hemat biaya operasionalnya, cocok untuk plat berbahandasar mild steel tipis (tebal plat kurang dari 1 mm) ataualumunium.
2. Mesin Tekuk Plat Hidrolik : Mesin inimenggunakan sistem hidrolik sebagai sumber tenaga penekuknya.Mesin ini membutuhkan biaya operasional yang cukup besarkarena selain membutuhkan daya listrik yang cukup untukmenggerakkan pompa hidroliknya juga menggunakan fluida dalamsistem hidroliknya berupa oli hidrolik yang secara berkalaharus diganti (2000 jam). Kelebihan mesin ini adalah mampumenekuk atau bending plat2 yang tebal (tergantung kapasitasmesin) seperti mild steel, stainless steel dan alumunium.
1.2 Rumusan Masalah
Hal hal yang perlu diperhatikan dalam memilih mesinbending plat ini adalah sebagai berikut :
1. Tebal Plat yang akan dibending atau ditekuk,satuannya mm
2. Panjang kerja bending atau tekukannya, satuannyamm
3. Lebar V opening yang dipakai, satuannya mm4. Tensile Strength dari material yang dipakai,
satuannya kg/mm2
1
Dari hal-hal yang tersebut diatas akan bisa ditentukanbesarnya kebutuhan tonase dari mesin bending plat. Untukkeamanan baiknya ditambahkan safety factor sebesar 1,5 daritotal kebutuhan tonase.
1.3 Batasan Masalah
Untuk menyelesaikan permasalahan-permasalahan dalamproses perhitungan sistem hidrolik ini diperlukan adanyabatasan-batasan dengan tujuan untuk memudahkan perhitunganperencanaan, penitikberatan permasalahan pokok dan agarpembahasan berlangsung dengan baik. dalam hal ini batasan atauasumsi yang dipakai adalah:
1. Kerugian-kerugian akibat gesekan-gesekan mekanis padasilinder dan kebocoran-kebocoran pada peralatan diabaikan2. Tidak membahas material dan konstruksi mesin 3. Sistem dalam keadaan steady state stedy flow (SSSF) 4. Aliran fluida adalah incompressible 5. Batasan lain ada pada pembahasan bila diperlukan.
1.4 Tujuan Analisa Sistem Hidrolik Mesin Press Brake
Adapun tujuan dari perhitungan Hidrolik adalah :1. Menghitung Tekanan2. Menentukan Kapasitas Motor 3. Menghitung HP dan HHP
1.5 Sistematika Penulisan
Laporan ini akan disusun dalam bentuk bab-bab danbeberapa sub bab sebagai tambahan keterangan. Bab-bab tersebutadalah sebagai berikut:
BAB I PENDAHULUAN Bab ini menjelaskan latar belakang masalah, tujuan daritugas akhir, manfaat penulisan dan batasan masalah.
BAB II TINJAUAN PUSTAKA Bab ini menjelaskan persamaan-persamaan dasar pada sistemhidrolik, reservoir, valve (katup), perpipaan dalaamsistem hidrolik dan gaya pada proses pemerasan.
BAB III METODOLOGI Bab ini menjelaskan diagram alir, pengamatan, pengumpulandata dan tahapan penelitian
2
BAB IV HASIL DAN PEMBAHASAN Bab ini menjelaskan tentang perhitungan berdasarkan gayayang dibutuhkan, head pump yang dibutuhkan, daya pompadan daya motor.
BAB V KESIMPULAN DAN SARAN Bab ini menjelaskan tentang kesimpulan dari hasilperhitungan serta saran terhadap kerja alat ini.
DAFTAR PUSTAKA LAMPIRAN
BAB IITINJAUAN PUSTAKA
2.1 Proses Konversi Energi Sistem Tenaga Hidrolik
Sistem tenaga hidrolik adalah suatu system yang digunakanuntuk memindahkan energi mekanik dari suatu tempat ke tempatyang lain. Hal ini bisa terjadi melalui pemanfaatan energitekan dari suatu fluida (pelumas). Pompa hidrolik dijalankandengan energi mekanis dimana energi mekanis ini akan diubahmenjadi energi tekan dan energi kinetis pada minyak hidrolik
3
(pelumas) yang pada akhirnya akan diubah kembali menjadienergi mekanis pada aktuator.[2]
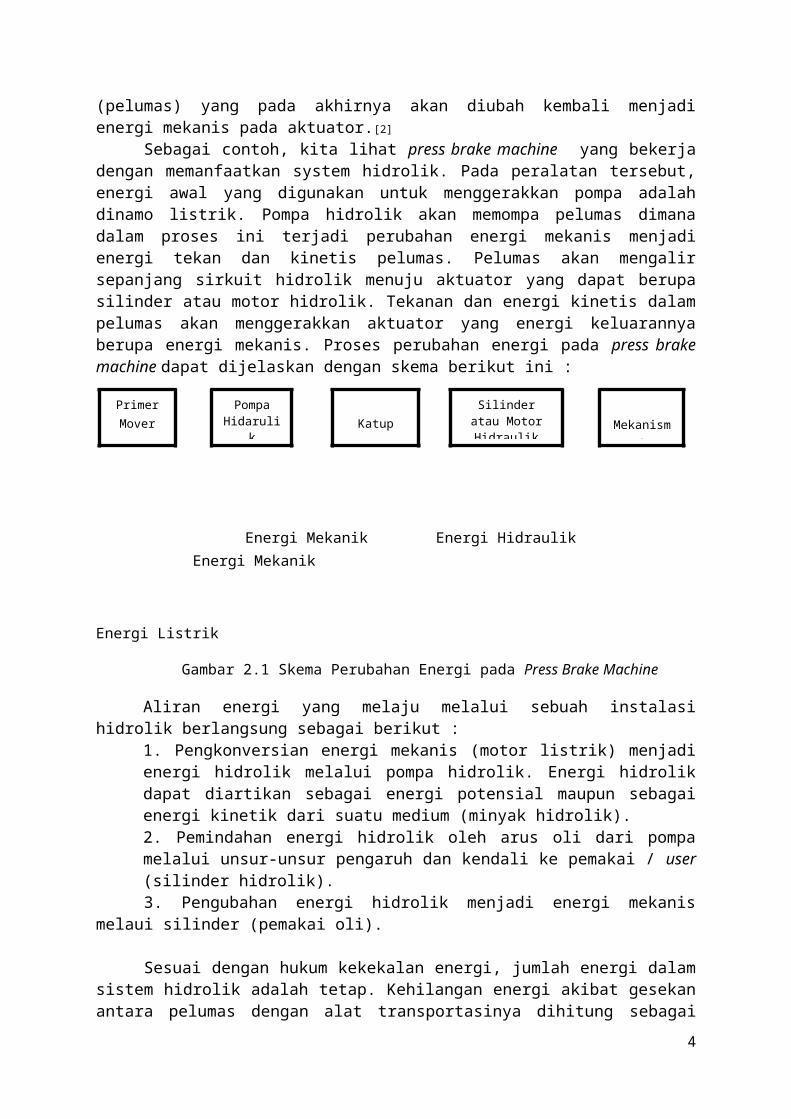
Sebagai contoh, kita lihat press brake machine yang bekerjadengan memanfaatkan system hidrolik. Pada peralatan tersebut,energi awal yang digunakan untuk menggerakkan pompa adalahdinamo listrik. Pompa hidrolik akan memompa pelumas dimanadalam proses ini terjadi perubahan energi mekanis menjadienergi tekan dan kinetis pelumas. Pelumas akan mengalirsepanjang sirkuit hidrolik menuju aktuator yang dapat berupasilinder atau motor hidrolik. Tekanan dan energi kinetis dalampelumas akan menggerakkan aktuator yang energi keluarannyaberupa energi mekanis. Proses perubahan energi pada press brakemachine dapat dijelaskan dengan skema berikut ini :
Energi Mekanik Energi HidraulikEnergi Mekanik
Energi Listrik
Gambar 2.1 Skema Perubahan Energi pada Press Brake Machine
Aliran energi yang melaju melalui sebuah instalasihidrolik berlangsung sebagai berikut :
1. Pengkonversian energi mekanis (motor listrik) menjadienergi hidrolik melalui pompa hidrolik. Energi hidrolikdapat diartikan sebagai energi potensial maupun sebagaienergi kinetik dari suatu medium (minyak hidrolik). 2. Pemindahan energi hidrolik oleh arus oli dari pompamelalui unsur-unsur pengaruh dan kendali ke pemakai / user(silinder hidrolik). 3. Pengubahan energi hidrolik menjadi energi mekanis
melaui silinder (pemakai oli).
Sesuai dengan hukum kekekalan energi, jumlah energi dalamsistem hidrolik adalah tetap. Kehilangan energi akibat gesekanantara pelumas dengan alat transportasinya dihitung sebagai
4
PrimerMover
PompaHidaruli
k
Katup
Silinderatau MotorHidraulik
Mekanisme
kerugian tekanan. Kehilangan tekanan ini besarnya sangattergantung dari pola aliran pelumas saat mengalir dalam sistemhidrolik. Pelumas hidrolik mempunyai pola aliran laminar danturbulan. Pola aliran laminar, pressure drop yang terjadidiakibatkan oleh viskositas pelumas sedangkan aliran turbulenmenimbulkan pressure drop akibat hambatan yang diberikan olehfitting dan kekasaran permukaan dari sistem pipa.2.2 Hukum Pascal
Hukum yang menjadi dasar dari prinsip hidrolik adalahhukum Pascal yang berkaitan dengan transmisi daya yangdilakukam oleh fluida atau pelumas. Secara umum hukum Pascalmenyatakan bahwa :
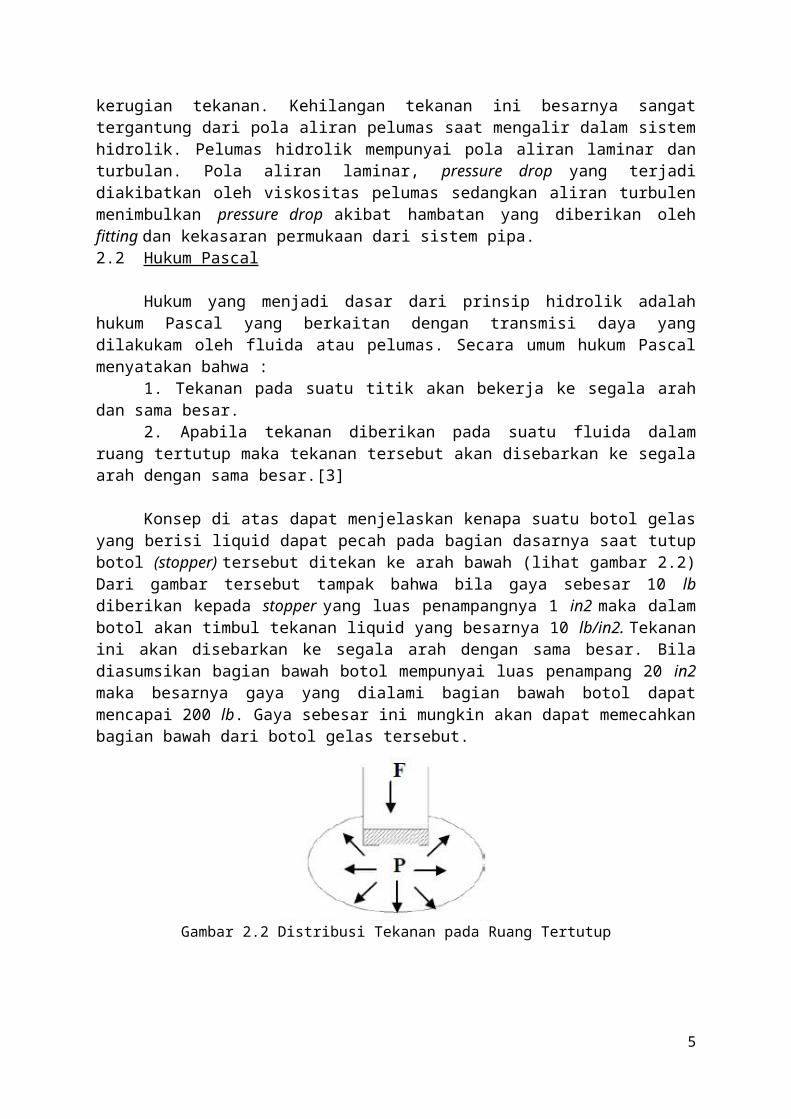
1. Tekanan pada suatu titik akan bekerja ke segala arahdan sama besar.
2. Apabila tekanan diberikan pada suatu fluida dalamruang tertutup maka tekanan tersebut akan disebarkan ke segalaarah dengan sama besar.[3]
Konsep di atas dapat menjelaskan kenapa suatu botol gelasyang berisi liquid dapat pecah pada bagian dasarnya saat tutupbotol (stopper) tersebut ditekan ke arah bawah (lihat gambar 2.2)Dari gambar tersebut tampak bahwa bila gaya sebesar 10 lbdiberikan kepada stopper yang luas penampangnya 1 in2 maka dalambotol akan timbul tekanan liquid yang besarnya 10 lb/in2. Tekananini akan disebarkan ke segala arah dengan sama besar. Biladiasumsikan bagian bawah botol mempunyai luas penampang 20 in2maka besarnya gaya yang dialami bagian bawah botol dapatmencapai 200 lb. Gaya sebesar ini mungkin akan dapat memecahkanbagian bawah dari botol gelas tersebut.
Gambar 2.2 Distribusi Tekanan pada Ruang Tertutup
5
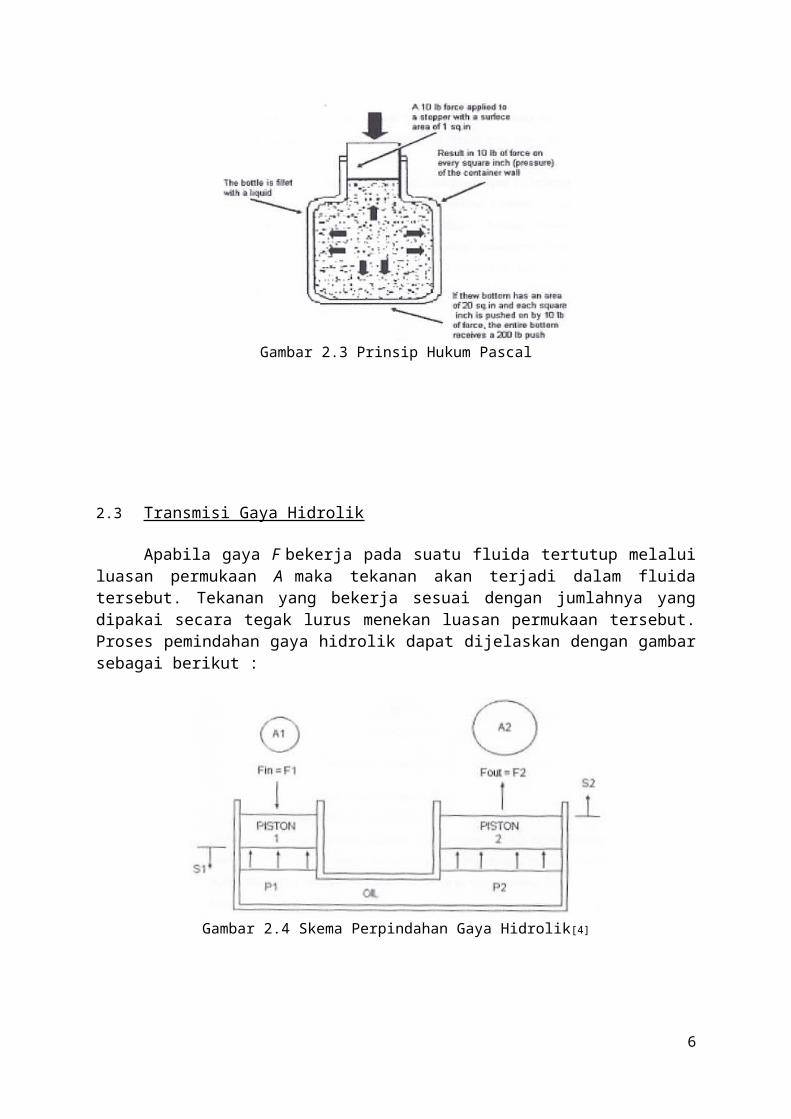
Gambar 2.3 Prinsip Hukum Pascal
2.3 Transmisi Gaya Hidrolik
Apabila gaya F bekerja pada suatu fluida tertutup melaluiluasan permukaan A maka tekanan akan terjadi dalam fluidatersebut. Tekanan yang bekerja sesuai dengan jumlahnya yangdipakai secara tegak lurus menekan luasan permukaan tersebut.Proses pemindahan gaya hidrolik dapat dijelaskan dengan gambarsebagai berikut :
Gambar 2.4 Skema Perpindahan Gaya Hidrolik[4]
6
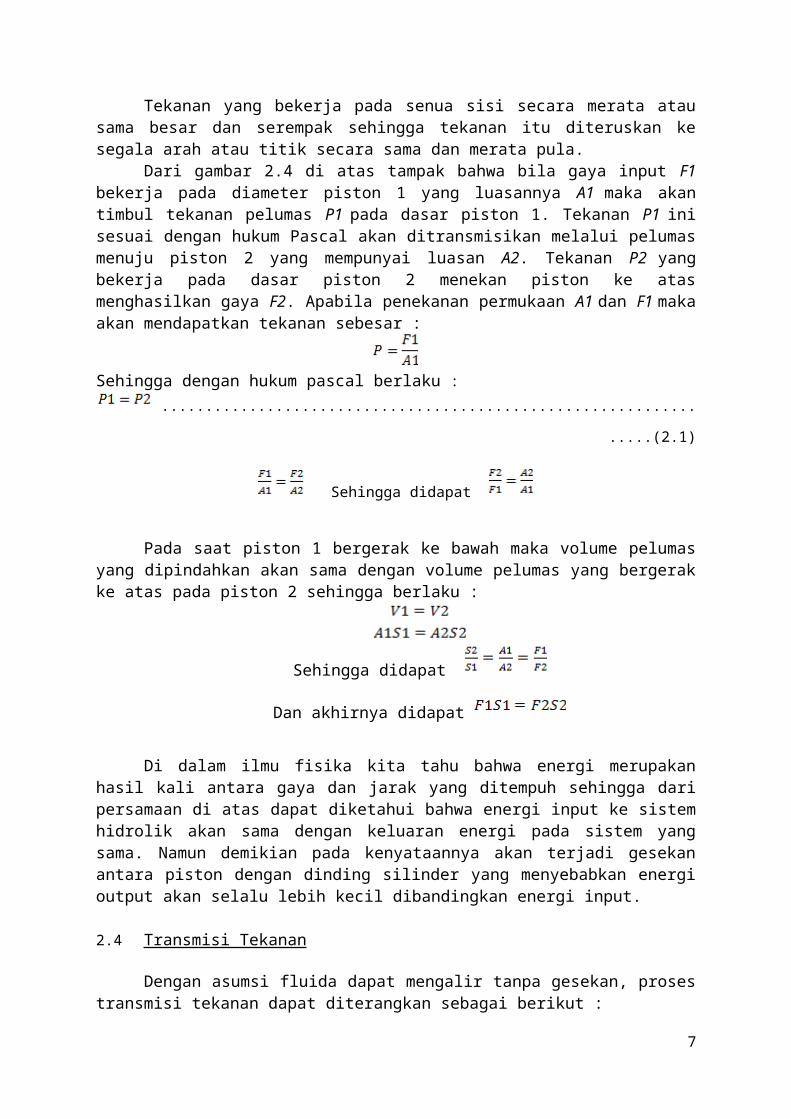
Tekanan yang bekerja pada senua sisi secara merata atausama besar dan serempak sehingga tekanan itu diteruskan kesegala arah atau titik secara sama dan merata pula.
Dari gambar 2.4 di atas tampak bahwa bila gaya input F1bekerja pada diameter piston 1 yang luasannya A1 maka akantimbul tekanan pelumas P1 pada dasar piston 1. Tekanan P1 inisesuai dengan hukum Pascal akan ditransmisikan melalui pelumasmenuju piston 2 yang mempunyai luasan A2. Tekanan P2 yangbekerja pada dasar piston 2 menekan piston ke atasmenghasilkan gaya F2. Apabila penekanan permukaan A1 dan F1 makaakan mendapatkan tekanan sebesar :
Sehingga dengan hukum pascal berlaku : .............................................................
.....(2.1)
Sehingga didapat
Pada saat piston 1 bergerak ke bawah maka volume pelumasyang dipindahkan akan sama dengan volume pelumas yang bergerakke atas pada piston 2 sehingga berlaku :
Sehingga didapat
Dan akhirnya didapat
Di dalam ilmu fisika kita tahu bahwa energi merupakanhasil kali antara gaya dan jarak yang ditempuh sehingga daripersamaan di atas dapat diketahui bahwa energi input ke sistemhidrolik akan sama dengan keluaran energi pada sistem yangsama. Namun demikian pada kenyataannya akan terjadi gesekanantara piston dengan dinding silinder yang menyebabkan energioutput akan selalu lebih kecil dibandingkan energi input.
2.4 Transmisi Tekanan
Dengan asumsi fluida dapat mengalir tanpa gesekan, prosestransmisi tekanan dapat diterangkan sebagai berikut :
7
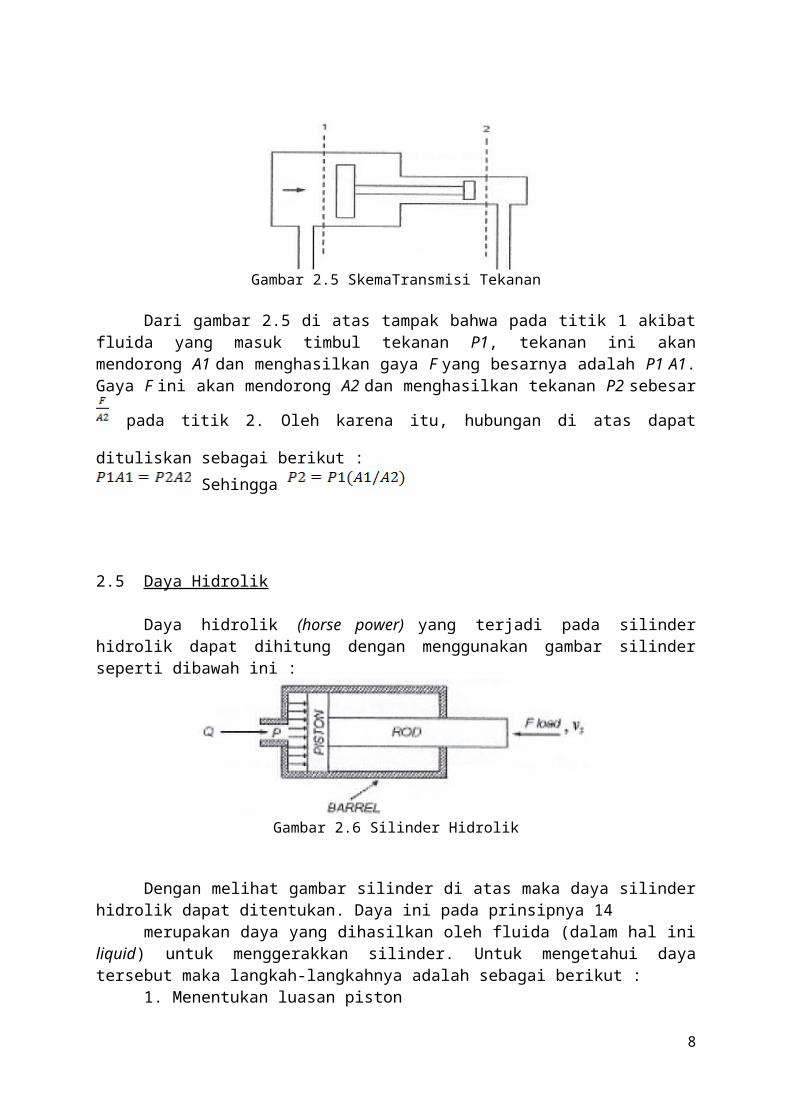
Gambar 2.5 SkemaTransmisi Tekanan
Dari gambar 2.5 di atas tampak bahwa pada titik 1 akibatfluida yang masuk timbul tekanan P1, tekanan ini akanmendorong A1 dan menghasilkan gaya F yang besarnya adalah P1 A1.Gaya F ini akan mendorong A2 dan menghasilkan tekanan P2 sebesar
pada titik 2. Oleh karena itu, hubungan di atas dapat
dituliskan sebagai berikut : Sehingga
2.5 Daya Hidrolik
Daya hidrolik (horse power) yang terjadi pada silinderhidrolik dapat dihitung dengan menggunakan gambar silinderseperti dibawah ini :
Gambar 2.6 Silinder Hidrolik
Dengan melihat gambar silinder di atas maka daya silinderhidrolik dapat ditentukan. Daya ini pada prinsipnya 14
merupakan daya yang dihasilkan oleh fluida (dalam hal iniliquid) untuk menggerakkan silinder. Untuk mengetahui dayatersebut maka langkah-langkahnya adalah sebagai berikut :
1. Menentukan luasan piston
8
Tekanan fluida P dari pompa akan bekerja pada luasanpiston A untuk menghasilkan gaya yang diperlukanmenggerakkan beban Fload.
sehingga
2. Menentukan volumetric flow rate fluida Q yang masuk silinderVolumetric displacement VD dari silinder hidrolik adalah samadengan volume yang dipindahkan piston pada saatbergerak sepanjang langkah S, yaitu VD = A x S, makabesarnya volumetric flow rate Q sama dengan VD dibagi dengan waktuyang dibutuhkan piston bergerak sejauh S sehingga akhirnya.
...............................................
...........(2.2)Dimana : A = luasan piston dan v = kecepatan linier fluida
3. Energi fluida dapat ditentukan dari hubungan , sedangkan daya fluida adalah sama dengan
energi fluida tiap satuan waktu, maka :
............................
..........(2.3)
dimana : Q = volumeetric flow rate
Dalam siistem inggris bila 1 hp = 550 ft.lb/dt, maka:
..............
.(2.4)Perlu diingat bahwa :1. Daya mekanis = Gaya x Kecepatan Linier
= Torsi x Kecepatan Agular2. Daya Elektrik = Volt x Ampere3. Daya Hidrolik = Teknan x Kapasitas
4. Menentukan effisiensi silinder Effisiensi silinder adalah sama dengan perbandinganantara daya mekanis dengan daya hidrolik. Sehinggadiperoleh:
9
..............................................
................(2.5)Dimana :
= Efisiensi silinderF = Gaya pembentukanV = Kexepatan silinderQ = Kapasitas silinderP = Tekanan pada silinder
2.6 Sistem Distribusi
Dalam sitem alirantenaga, aliran fluida didistribusikanmelalui pipa dan fitting yang membawa fluida dari reservoir kekomponen-komponen yang bekerja dan kemudian kembali ke dalamreservoir. Di dalam sistem aliran tenaga digunakan empat jenispipa yaitu:
a. Steel pipe b. Steel tubing c. Plastic tubing d. Flexible Hoses Pemilihan dari masing-masing jenis pipa tergantung
kebutuhan dalam tekanan operasi dan debit aliran. Padadasarnya pemilihan juga didasarkan pada kondisi lingkungan,jenis fluida yang digunakan, temperatur operasi, getaran dangerakan relatif antara komponen-komponen yang bekerja.
2.7 Tekanan yang Terjadi Dalam Pipa
Penghantar fluida dalam hal ini pipa harus cukup kuat mencegah pecahnya pipa apabila diberikan suatu tekanan. Tekanan yang terjadi dalam pipa harus mampu melawan tekanan kerja system. Fluida didalam pipa memberikan tekanan sebesar Pyang disebarkan ke seluruh dinding.
Sehingga: F = Q = P .
A.................................................................(2.6)
10
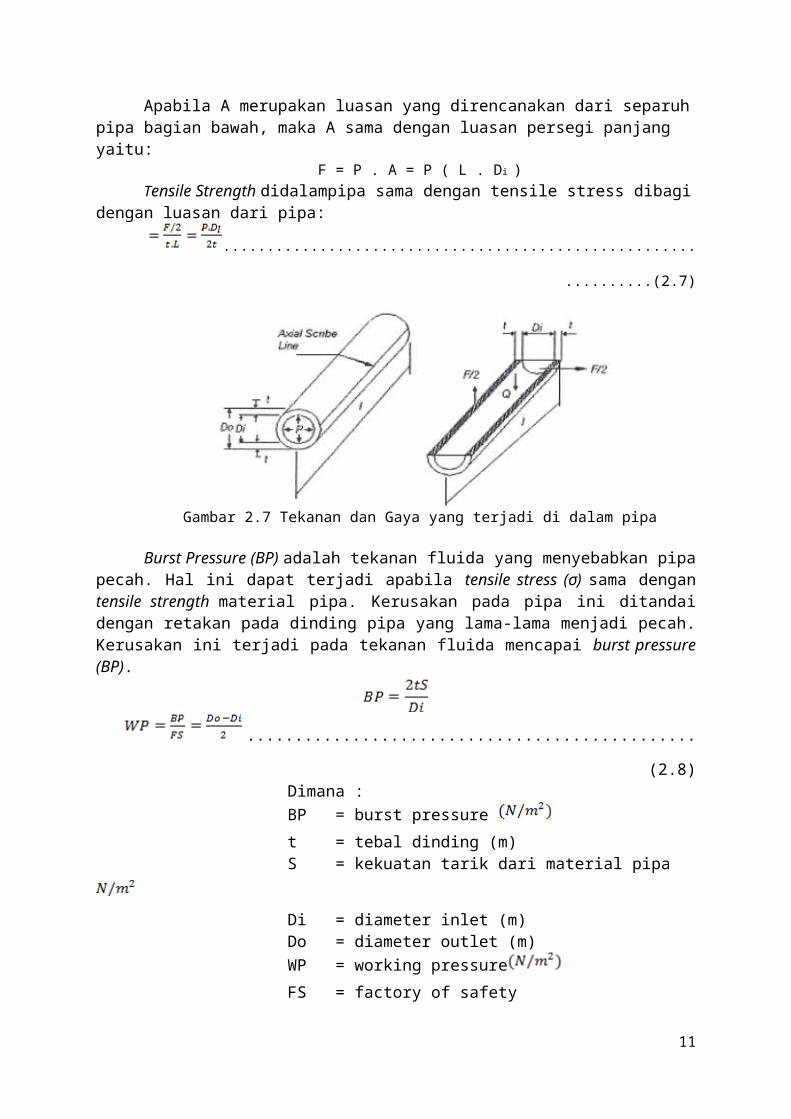
Apabila A merupakan luasan yang direncanakan dari separuhpipa bagian bawah, maka A sama dengan luasan persegi panjang yaitu:
F = P . A = P ( L . Di )Tensile Strength didalampipa sama dengan tensile stress dibagi
dengan luasan dari pipa:
......................................................
..........(2.7)
Gambar 2.7 Tekanan dan Gaya yang terjadi di dalam pipa
Burst Pressure (BP) adalah tekanan fluida yang menyebabkan pipapecah. Hal ini dapat terjadi apabila tensile stress (σ) sama dengantensile strength material pipa. Kerusakan pada pipa ini ditandaidengan retakan pada dinding pipa yang lama-lama menjadi pecah.Kerusakan ini terjadi pada tekanan fluida mencapai burst pressure(BP).
...............................................
(2.8)Dimana :BP = burst pressure t = tebal dinding (m)S = kekuatan tarik dari material pipa
Di = diameter inlet (m)Do = diameter outlet (m)WP = working pressureFS = factory of safety
11
Tekanan operasi (WP) adalah tekanan kerja maksimum yangaman dan didefinisikan sebagai burst pressure dari pipa dibagidengan faktor keamanan. Hal ini menjamin keadaan dari pipastandar industri merekomendasikan factor keamanan berdasarkanhubungan dengantekanan kerja atau operasi sebagai berikut: [4]
FS = 8, untuk tekanan dari 0-1000 psi FS = 6, untuk tekanan dari 1000-2500 psi FS = 4, untuk tekanan > 2500 psi
2.8 Persamaan Darcy
Persamaan ini digunakan untuk menghitung besarnya kerugian gesek yang terjadi pada instalasi hidrolik. Perubahantekanan pada sistem aliran incompressible yang mengalir melalui pipa saluran dan system aliran terjadi karena perubahan gesekan. Kerugian tekanan atau kehilangan tekanan ini pada umumnya dapat dikelompokkan menjadi:[5]
1. Kerugian Major (Major Losses) 2. Kerugian Minor (Minor Loses)
2.8.1 Kerugian Major (Major Losses)
Merupakan kehilangan tekanan karena gesekan pada dinding pipa yang mempunyai luas penampang yang tetap yang yerjadi dalam pipa yang besarnya adalah:
)........................................................
.......(2.9)Dimana :f = factor gesekanL = panjang pipaD = diameter dalam pipaV = kecepatan rata-rata fluidag = percepatan gravitasi
2.8.2 Kerugian Minor (Minor Losses)
Kerugian minor merupakan kerugian gesekan yang terjadi pada tiap katup atau fitting seperti tee, elbow dan bengkokan (bends) yang besarnya sama dengan:
12
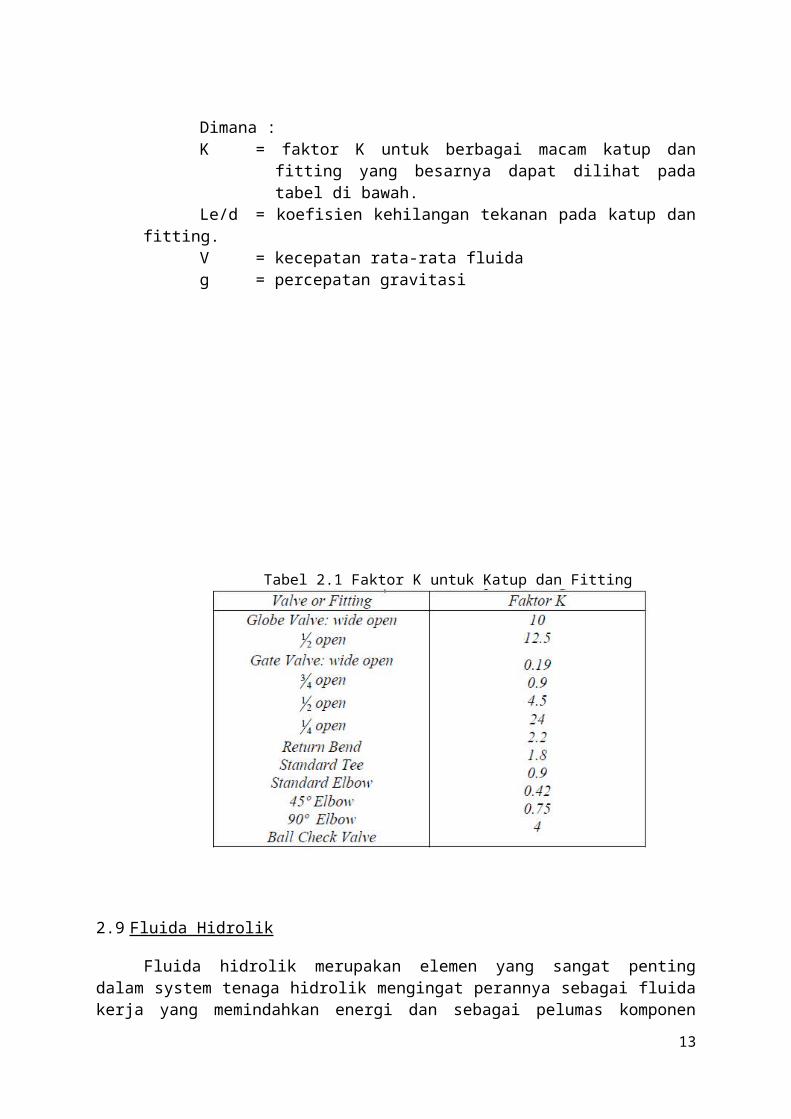
Dimana :K = faktor K untuk berbagai macam katup dan
fitting yang besarnya dapat dilihat padatabel di bawah.
Le/d = koefisien kehilangan tekanan pada katup danfitting.
V = kecepatan rata-rata fluidag = percepatan gravitasi
Tabel 2.1 Faktor K untuk Katup dan Fitting
2.9 Fluida Hidrolik
Fluida hidrolik merupakan elemen yang sangat pentingdalam system tenaga hidrolik mengingat perannya sebagai fluidakerja yang memindahkan energi dan sebagai pelumas komponen
13
penyusun system. Mengingat peranannya yang sangat pentingtersebut maka pelumas harus mempunyai sifat-sifat sebagaiberikut:[5]
a. Mempunyai viskositas yang memadai. b. Mampu mencegah adanya pembentukan endapan, getah oli
dan pernis. c. Tidak mudah membentuk buih-buih oli. d. Memelihara kestabilan dengan sendirinya, dengandemikian akan mengurangi ongkos penggantian fluida.
e. Secara relative mampu menjaga nilai kekentalanwalaupun dalam temperatur yang tinggi.
f. Memisahkan kandungan air. g. Sesuai dengan penyekat yang dipakai pada komponen. h. Tidak beracun. i. Mampu mencegah korosi atau kontaminasi.
Syarat-syarat kualitas yang harus dipenuhi seringdijumpai adanya hasil campuran khusus dan tidak bolehdihadirkan pada setiap jenis fluida. Viskositas secra umumdianggap sesuatu yang paling penting dalam sifat-sifat fisikdari oli hidrolik karena akan mempengaruhi kemampuan untukmengalir. Nilai viskositas suatu fluida dikatakan rendah jikafluida tersebut mengalir dengan mudah yang selanjutnya disebutsebagai fluida ringan atau encer. Nilai viskositas suatufluida dikatakan tinggi jika fluida tersebut sulit mengaliryang selanjutnya disebut sebagai fluida berat atau kental.Jenis fluida yang akan dipakai dalam sistem hidrolik adalaholi.
Dalam praktek pemakaiannya, memilih oli dengan viskositastertentu adalah satu hal yang sangat dianjurkan. Seringkalipemilihan ini telah ditentukan oleh pembuat pompahidroliksehingga pemilihan oli dengan spesifikasi tertentu akanmemenuhi sifat dan karakteristik daripada pengangkat hidrolikyang telah direncanakannya. Gerakan viskositas oli yang tinggimemberikan pengisian yang baik antara celah dari pompa, katupdan motor. Tetapi apabila nilai viskositas oli terlalu tinggimakaakan memberi akibat seperti berikut ini:
Karena hambatan untuk mengalir besar menyebabkan seretnyagerakan elemen penggerak (actuator) dan kavitasi pompa (udara masukke dalam pompa)
1. Pemakaian tenaga bertambah karena kerugian gesekanyang dapat mempercepat umur dari peralatan
14
2. Penurunan tekanan bertambah melalui saluran-salurandan katup-katup.
Tetapi sebaiknya apabila viskositas oli terlalu rendahakan mengakibatkan hal-hal sebagai berikut:
1. Kerugian-kerugian kebocoran dalam system berlebihan. 2. Arus berlebihan karena pelumasan tidak mencukupi pada
pompa dan motor. 3. Menurunkan efisiensi motor. 4. Suhu oli naik atau bertambah karena kerugian-kerugian
kebocoran dalam.
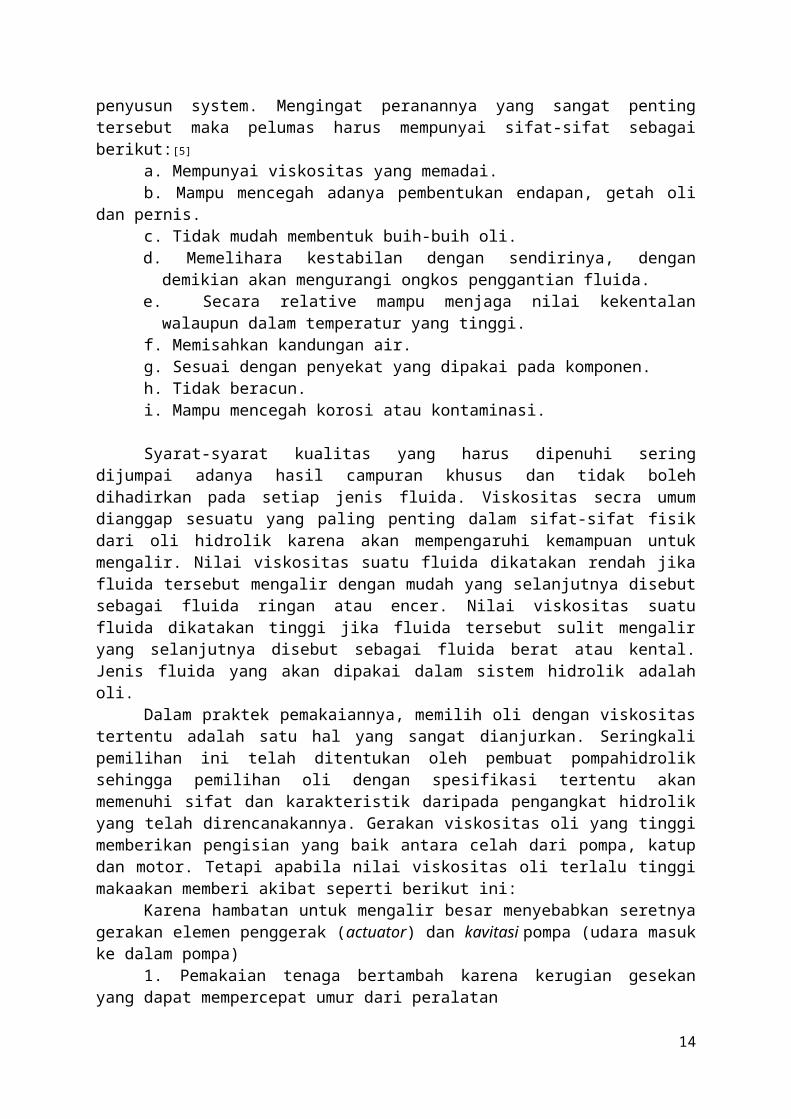
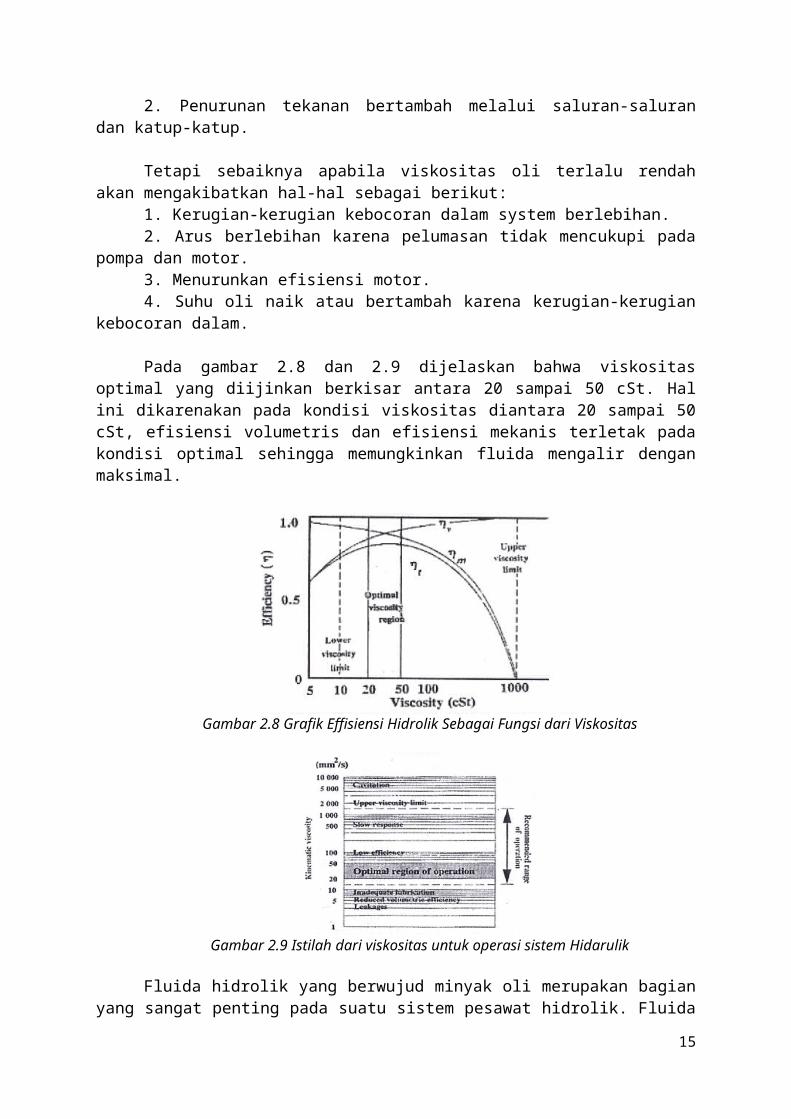
Pada gambar 2.8 dan 2.9 dijelaskan bahwa viskositasoptimal yang diijinkan berkisar antara 20 sampai 50 cSt. Halini dikarenakan pada kondisi viskositas diantara 20 sampai 50cSt, efisiensi volumetris dan efisiensi mekanis terletak padakondisi optimal sehingga memungkinkan fluida mengalir denganmaksimal.
Gambar 2.8 Grafik Effisiensi Hidrolik Sebagai Fungsi dari Viskositas
Gambar 2.9 Istilah dari viskositas untuk operasi sistem Hidarulik
Fluida hidrolik yang berwujud minyak oli merupakan bagianyang sangat penting pada suatu sistem pesawat hidrolik. Fluida
15
hidrolik dalam aplikasinya mempunyai empat tujuan utamayaitu :
1. Sebagai penerus gaya. Aplikasi fluida sebagai penerus gaya, fluida harusdapat mengalir dengan mudah melalui komponen-komponensalurannya. Terlalu banyak hambatan untuk mengalir,akan sangat besar tenaga yang hilang. Fluida sedapatmungkin harus mempunyai sifat tidak kompresibelsehingga gerakan yang terjadi pada saat pompadihidupkan atau katup dibuka dengan segera dapatdipindahkan.
2. Pelumasan. Sebagian besar pada komponen hidrolik, pelumasan bagiandalam disediakan oleh fluida cair. Elemen pompa dankomponen lain yang begesekan saling meluncur satuterhadap lainnya, sehingga antara dua bidang yangmelakukan gesekan itu perlu diberi lapisan film minyakuntuk menjaga agar dua bidang itu tidak terjadi kontaklangsung atau bergesekan langsung. Untuk menjamin umurpemakaian komponen hidrolik lebih lama, kandungan oliharus terdiri dari bahan-bahan tambahan utama yangdiinginkan untuk menjamin karakteristik anti keausanyang tinggi. Tetapi tidak semua oli hidrolik mengandungbahan tambahan.
3. Sebagai pengisi (sealing). Dalam hal tertentu, fluida hanya sebagai pengisi(penutup) terhadap tekanan di dalam suatu komponenhidrolik. Terlihat pada gambar di bawah ini bahwa tidakada cincin pengisi antara batang terhadap rumahkatupnya untuk menekan kebocoran dari lintasan tekanantinggi ke lintasan tekanan rendah. Kerapatan mekanikpengepasan dan viskositas oli menentukan kebocoranrata-ratanya.
4. Sebagai pendingin. Sirkulasi minyal oli melelui pipa-pipa penghantar danseluruh dinding bak penampang (reservoir) akan menyerappanas yang ditimbulkan dalam sistem hidrolik.
16
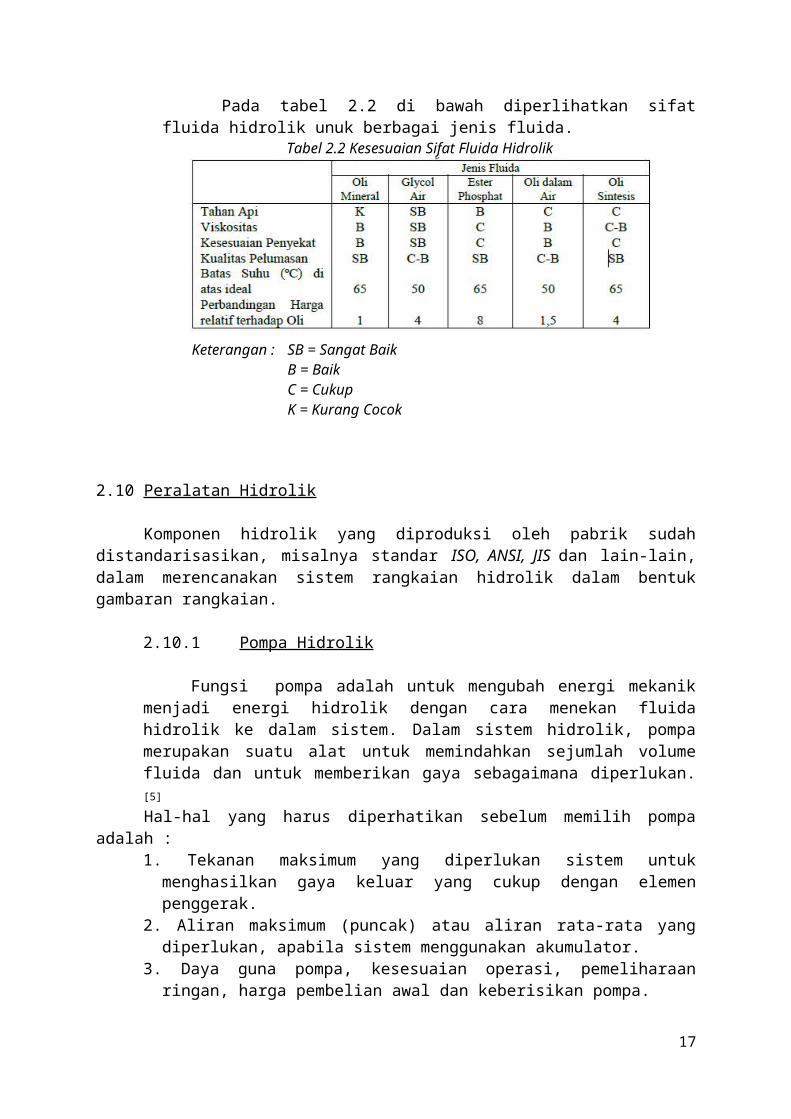
Pada tabel 2.2 di bawah diperlihatkan sifatfluida hidrolik unuk berbagai jenis fluida.
Tabel 2.2 Kesesuaian Sifat Fluida Hidrolik
Keterangan : SB = Sangat Baik B = Baik C = Cukup
K = Kurang Cocok
2.10 Peralatan Hidrolik
Komponen hidrolik yang diproduksi oleh pabrik sudahdistandarisasikan, misalnya standar ISO, ANSI, JIS dan lain-lain,dalam merencanakan sistem rangkaian hidrolik dalam bentukgambaran rangkaian.
2.10.1 Pompa Hidrolik
Fungsi pompa adalah untuk mengubah energi mekanikmenjadi energi hidrolik dengan cara menekan fluidahidrolik ke dalam sistem. Dalam sistem hidrolik, pompamerupakan suatu alat untuk memindahkan sejumlah volumefluida dan untuk memberikan gaya sebagaimana diperlukan.[5] Hal-hal yang harus diperhatikan sebelum memilih pompa
adalah : 1. Tekanan maksimum yang diperlukan sistem untukmenghasilkan gaya keluar yang cukup dengan elemenpenggerak.
2. Aliran maksimum (puncak) atau aliran rata-rata yangdiperlukan, apabila sistem menggunakan akumulator.
3. Daya guna pompa, kesesuaian operasi, pemeliharaanringan, harga pembelian awal dan keberisikan pompa.
17
4. Kontrol aliran pompa selama sistem berada dalam tahaptak bergerak, pemindahan tetap dan pemindahan taktetap.
5. Pemilihan actuator (silinder hidrolik atau motor)sebagai acuan tekanan dan kapasitas pompa.
6. Pilih pompa berdasarkan dasar dari aplikasi (gear, vaneatau piston pump).
Berdasarkan sistem pemindahannya secara umum pompadapat digolongkan menjadi dua macam, yaitu : 1. Non Positive Displacement Pump
Untuk pompa tipe ini umumnya digunakan untuk tekananrendah dan kecepatan aliran fluida yang tinggi. Karenatidak sesuai dengan tekanan tinggi maka tidak banyakdigunakan pada industri hidrolik. Pada umumnya kapasitastekanan maksimum dibatasi antara 250 – 300 psi. Tipe daripompa ini lebih banyak digunakan untuk memindahkan fluidadari suatu tempat ke tempat yang lain.
2. Positive Displacement Pump Untuk pompa tipe ini pada umumnya digunakan pada
sistem aliran tenaga. Ketika diterapkan, positive displacementpump mengalirkan fluida dari sistem hidrolik pada setiapputaran dari setiap putaran poros pompa. Pompa ini mampumengatasi kelebihan tekanan dari beban mekanik darisistem, selain itu juga dapat mengatasi tahanan aliranyang disebabkan oleh gesekan.
Mengingat sistem hidrolik umumnya bekerja pada
tekanan operasi yang relatif tinggi maka jenis pompa yangdipakai dalam sistem hidrolik adalah positive displacementpump. Dimana positive displacement pump memiliki beberapa keuntungan,
antara lain : • Membangkitkan tekanan tinggi. • Mempunyai efisiensi volumetrik yang relatif tinggi. • Aliran pompa relatif kecil. • Perubahan efisiensi relatif kecil pada daerah tekanantertentu. • Fleksibilitas performansi tinggi (dapat dioperasikan padakebutuhan tekanan dan kecepatan yang bervariasi).
18
Pompa hidrolik dapat dikelompokkan menurut gerakan darikomponen internalnya, yaitu : 1. Gear Pump (mempunyai roda gigi yang susunannya biasanyaterdiri atas gigi penggerak/drive gear dan gigi yangdigerakkan/driven gear).
2. Vane Pump (mempunyai sudu sebagai alat penekan). 3. Piston Pump.
Perhitungan daya pompa sebelumnya harus diketahuiagar tidak terjadi kekeliruan dalam perhitungan. Sehinggadaya pompa adalah :
.......................................................(2.10)
Dimana : W = Daya pompa
Q = Kapasitas silinderH = Head Pompa
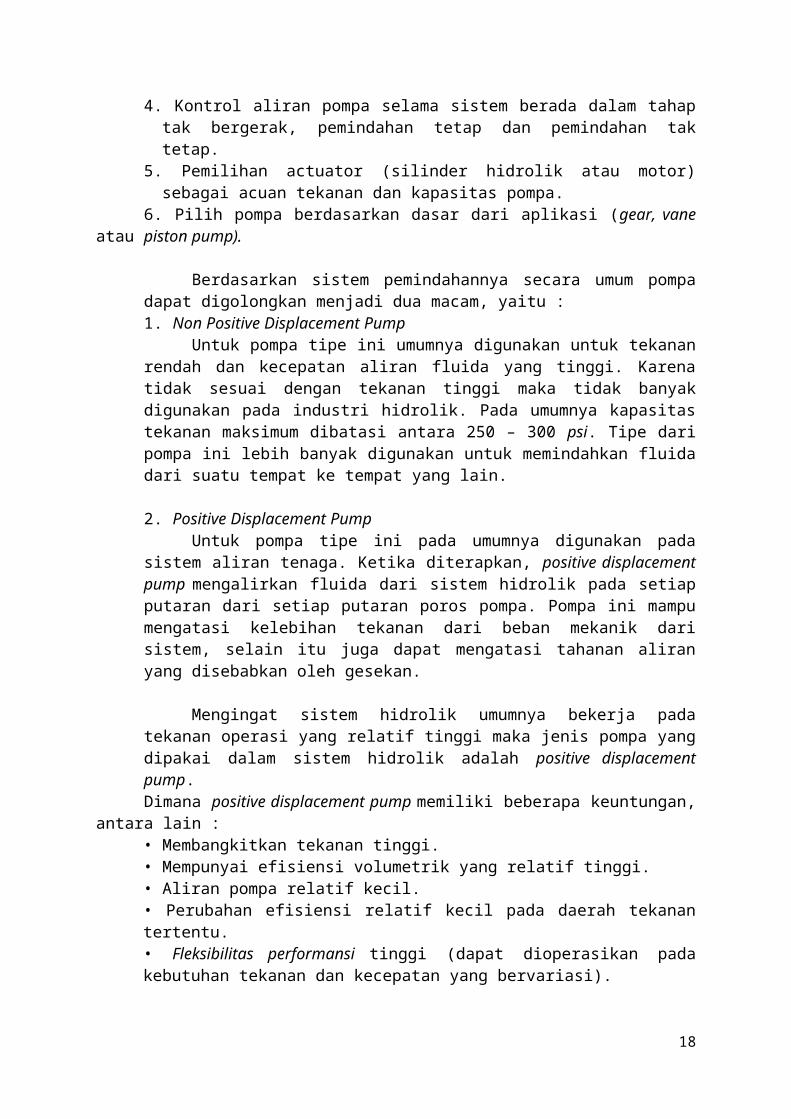
Untuk perbandingan dari berbagai jenis pompa dapatdilihat pada tabel di bawah ini :
Tabel 2.3 Perbandingan pada Berbagai Jenis Pompa
Sehingga dengan beberapa faktor yang tersebut diatas maka dipilih pompa dengan tipe Gear Pump. Hal inidikarenakan adanya beberapa alasan, antara lain : 1. Konstruksinya sederhana dan kokoh. 2. Kemantapan kerja yang tinggi, juga pada pembebananyang mantap. 3. Tidak tergantung dari letak pemasangan.4. Sifat penghisapan yang baik (pada putaran yangkonstan). 5. Relatif tidak peka terhadap kotoran. 6. Jangkauan putarannya besar (biasanya h = 1400 – 2800rpm).
19
7. Dapat digunakan untuk berbagai daerah tekanan (mulaidari 40 bar – 160 bar). 8. Efisiensi yang memadai (75% - 90%).
A. Pompa Roda Gigi (Gear Pump) Prinsip kerja pompa jenis ini adalah menciptakan
aliran dengan membawa fluida diantara gigi dari meshinggear (gigi yang bertautan). Susunan giginya biasanyaterdiri atas gigi penggerak (drive gear) dan gigi yangdigerakkan (driven gear). Sejumlah zat cair masuk di sisihisap ke dalam rongga-rongga gigi kemudian dipindahkan kesisi tekan. Pada saat tersebut zat cair oleh cengkeramangigi didesak keluar dari rongga-rongga gigi. Oleh sebabitu rongga-rongga gigi disebut sebagai ruang-ruangpendesak.
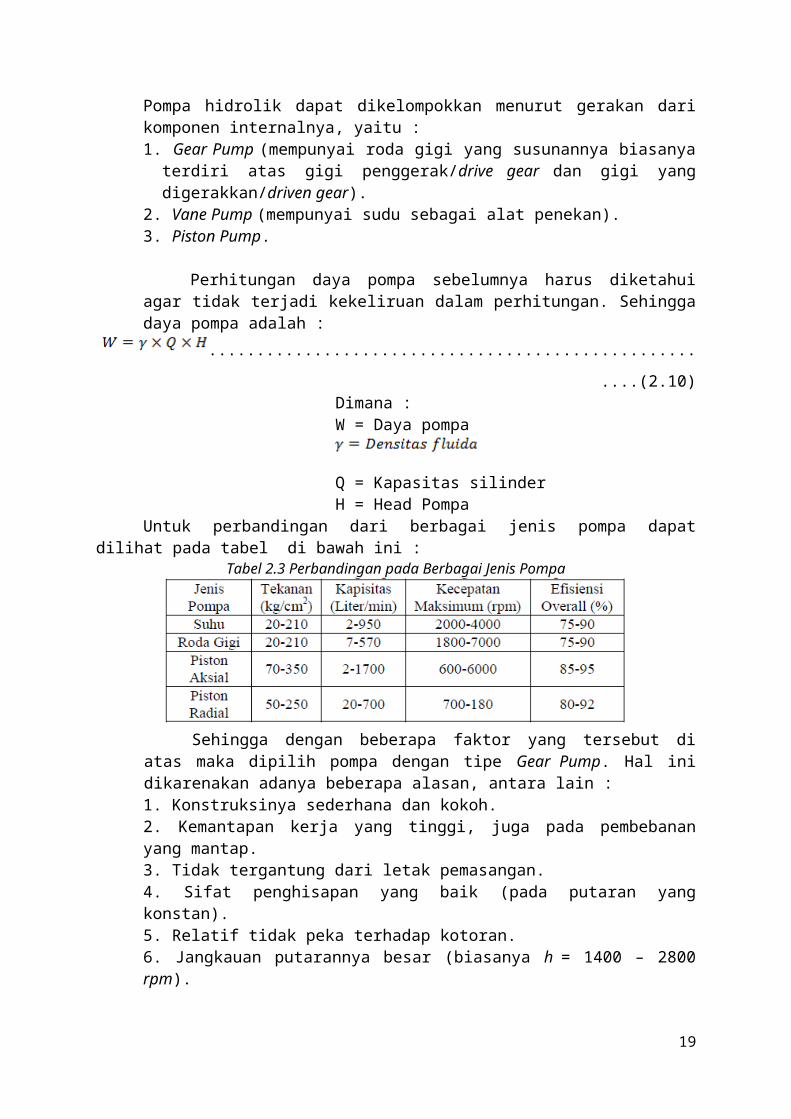
1) Pompa roda gigi eksternal. Pada pompa jenis ini kondisi vakum terjadi pada inlet
saat gigi unmesh dan kondisi ini akan menarik fluida masukruang yang terbentuk di antara gigi-gigi tersebut. Gambardi bawah ini menunjukkan operasi dari pompa roda gigieksternal.
Gambar 2.10 Operasi Pompa Roda Gigi Eksternal
2) Pompa roda gigi internal. Pompa ini terdiri dari internal gear, regular spur gear,
crescent seal dan external housing. Operasdari pompa ini dapat dilihat pada gambar 2.17 di bawah
20
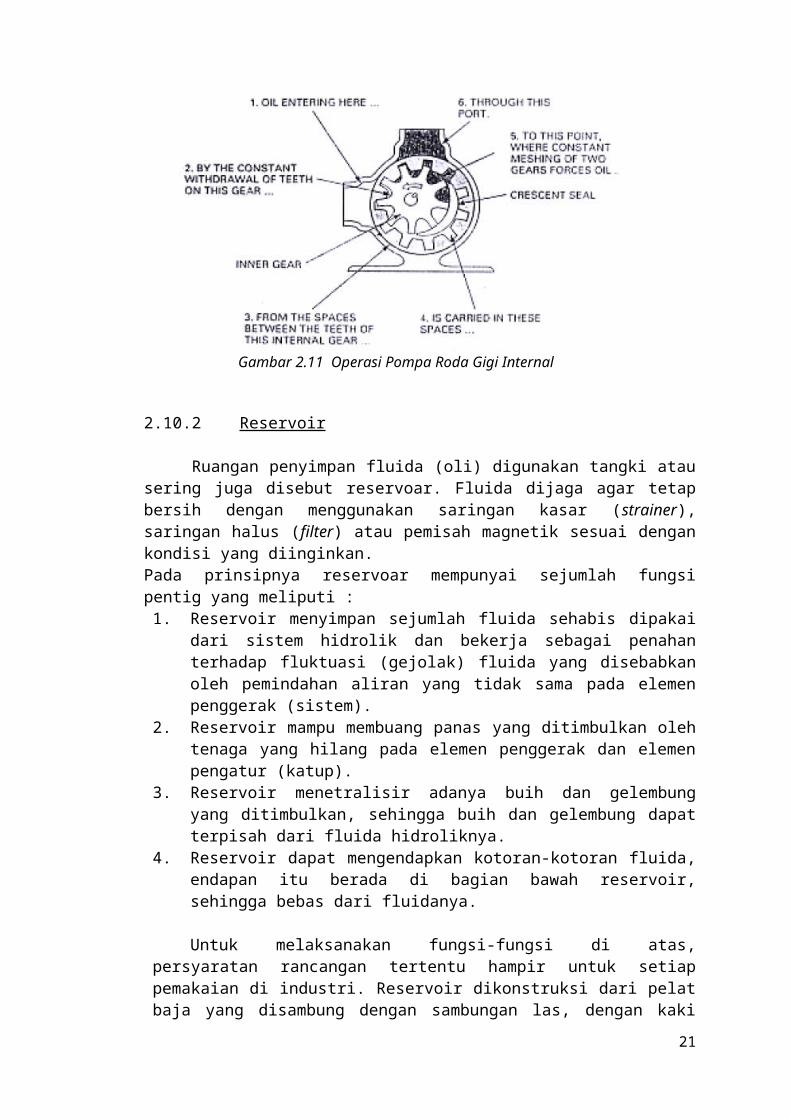
Gambar 2.11 Operasi Pompa Roda Gigi Internal
2.10.2 Reservoir
Ruangan penyimpan fluida (oli) digunakan tangki atausering juga disebut reservoar. Fluida dijaga agar tetapbersih dengan menggunakan saringan kasar (strainer),saringan halus (filter) atau pemisah magnetik sesuai dengankondisi yang diinginkan. Pada prinsipnya reservoar mempunyai sejumlah fungsipentig yang meliputi : 1. Reservoir menyimpan sejumlah fluida sehabis dipakai
dari sistem hidrolik dan bekerja sebagai penahanterhadap fluktuasi (gejolak) fluida yang disebabkanoleh pemindahan aliran yang tidak sama pada elemenpenggerak (sistem).
2. Reservoir mampu membuang panas yang ditimbulkan olehtenaga yang hilang pada elemen penggerak dan elemenpengatur (katup).
3. Reservoir menetralisir adanya buih dan gelembungyang ditimbulkan, sehingga buih dan gelembung dapatterpisah dari fluida hidroliknya.
4. Reservoir dapat mengendapkan kotoran-kotoran fluida,endapan itu berada di bagian bawah reservoir,sehingga bebas dari fluidanya.
Untuk melaksanakan fungsi-fungsi di atas,persyaratan rancangan tertentu hampir untuk setiappemakaian di industri. Reservoir dikonstruksi dari pelatbaja yang disambung dengan sambungan las, dengan kaki
21
mengangkat reservoir di atas lantai (landasan). Dengancara ini akan memberikan pendinginan oleh sirkulasiudara sekitar keseluruh dinding reservoir dan bagianbawahnya, sehingga pemindahan panasnya menjadi optimal.
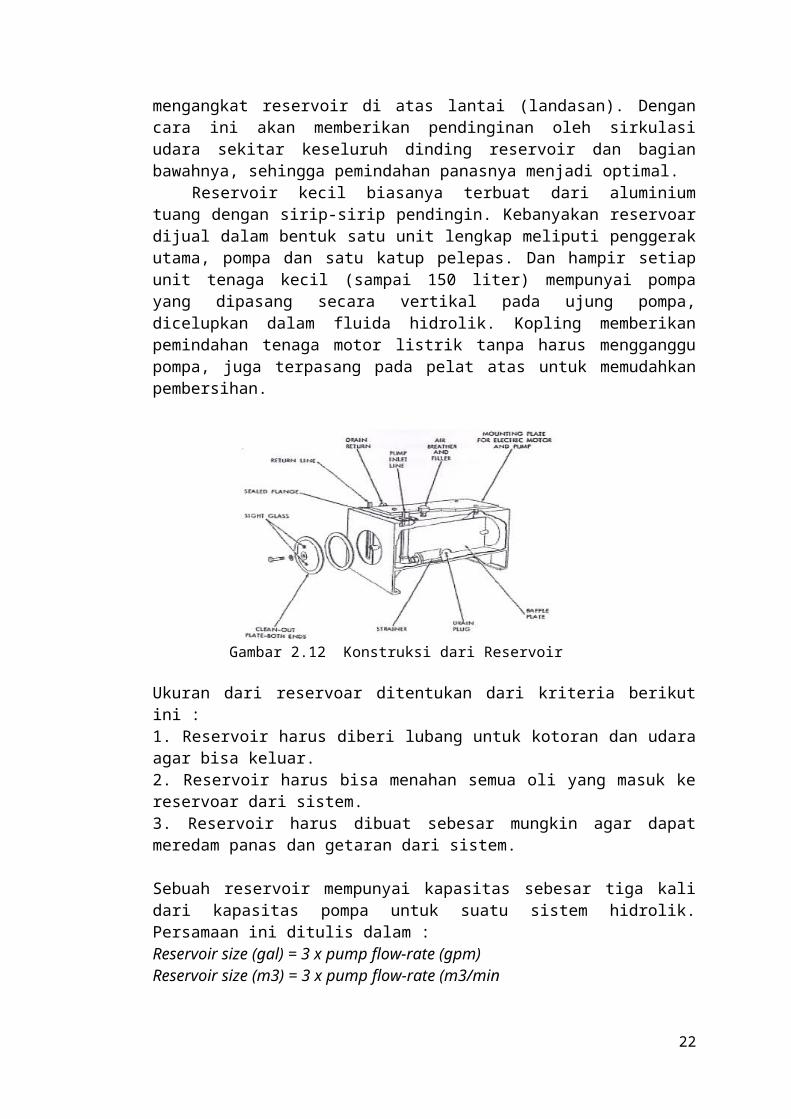
Reservoir kecil biasanya terbuat dari aluminiumtuang dengan sirip-sirip pendingin. Kebanyakan reservoardijual dalam bentuk satu unit lengkap meliputi penggerakutama, pompa dan satu katup pelepas. Dan hampir setiapunit tenaga kecil (sampai 150 liter) mempunyai pompayang dipasang secara vertikal pada ujung pompa,dicelupkan dalam fluida hidrolik. Kopling memberikanpemindahan tenaga motor listrik tanpa harus mengganggupompa, juga terpasang pada pelat atas untuk memudahkanpembersihan.
Gambar 2.12 Konstruksi dari Reservoir
Ukuran dari reservoar ditentukan dari kriteria berikutini : 1. Reservoir harus diberi lubang untuk kotoran dan udaraagar bisa keluar. 2. Reservoir harus bisa menahan semua oli yang masuk kereservoar dari sistem. 3. Reservoir harus dibuat sebesar mungkin agar dapatmeredam panas dan getaran dari sistem.
Sebuah reservoir mempunyai kapasitas sebesar tiga kalidari kapasitas pompa untuk suatu sistem hidrolik.Persamaan ini ditulis dalam : Reservoir size (gal) = 3 x pump flow-rate (gpm)Reservoir size (m3) = 3 x pump flow-rate (m3/min
22
2.10.3 Aktuator
Aktuator merupakan komponen hidrolik yang berfungsiuntuk mengubah energi hidrolik dari pompa menjadi energimekanik yang berupa gaya dan kecepatan. Aktuator menurutoperasinya dapat dikelompokkan sebagai berikut :1. Silinder Hidrolik
Berfungsi mengubah energi hidrolik menjadi gerakanlinear dan jenis-jenis silinder ini antara lain
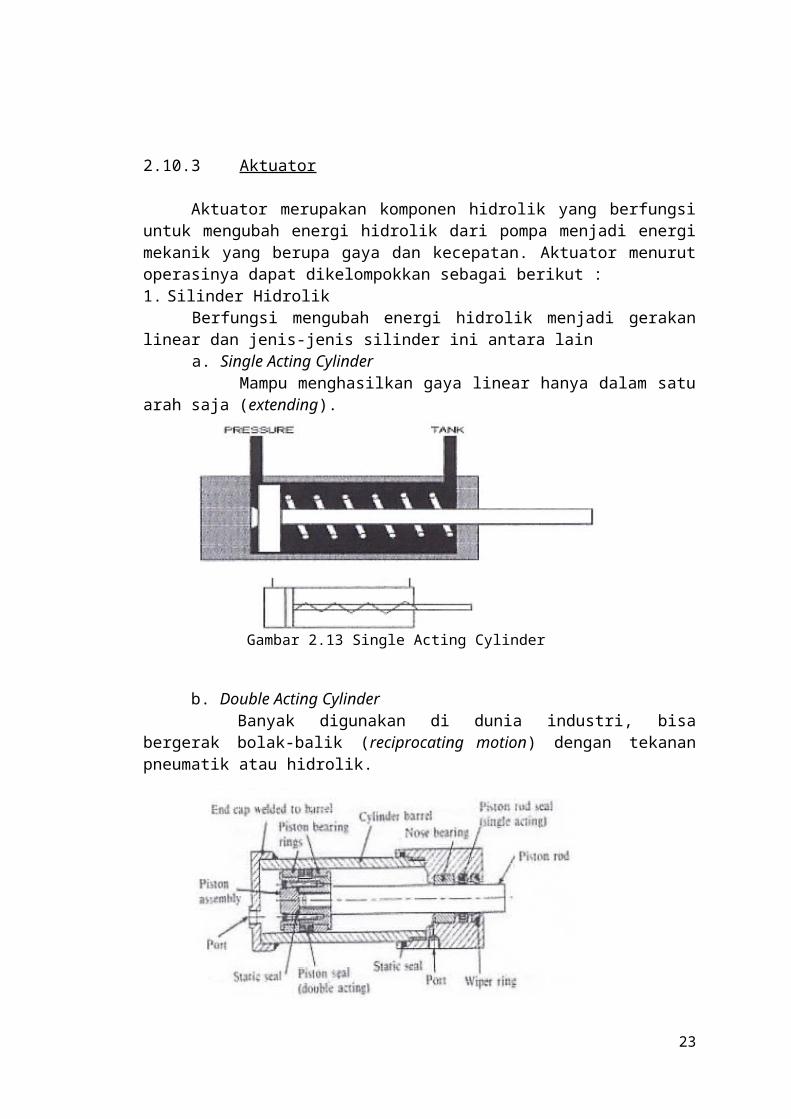
a. Single Acting Cylinder Mampu menghasilkan gaya linear hanya dalam satu
arah saja (extending).
Gambar 2.13 Single Acting Cylinder
b. Double Acting Cylinder Banyak digunakan di dunia industri, bisa
bergerak bolak-balik (reciprocating motion) dengan tekananpneumatik atau hidrolik.
23
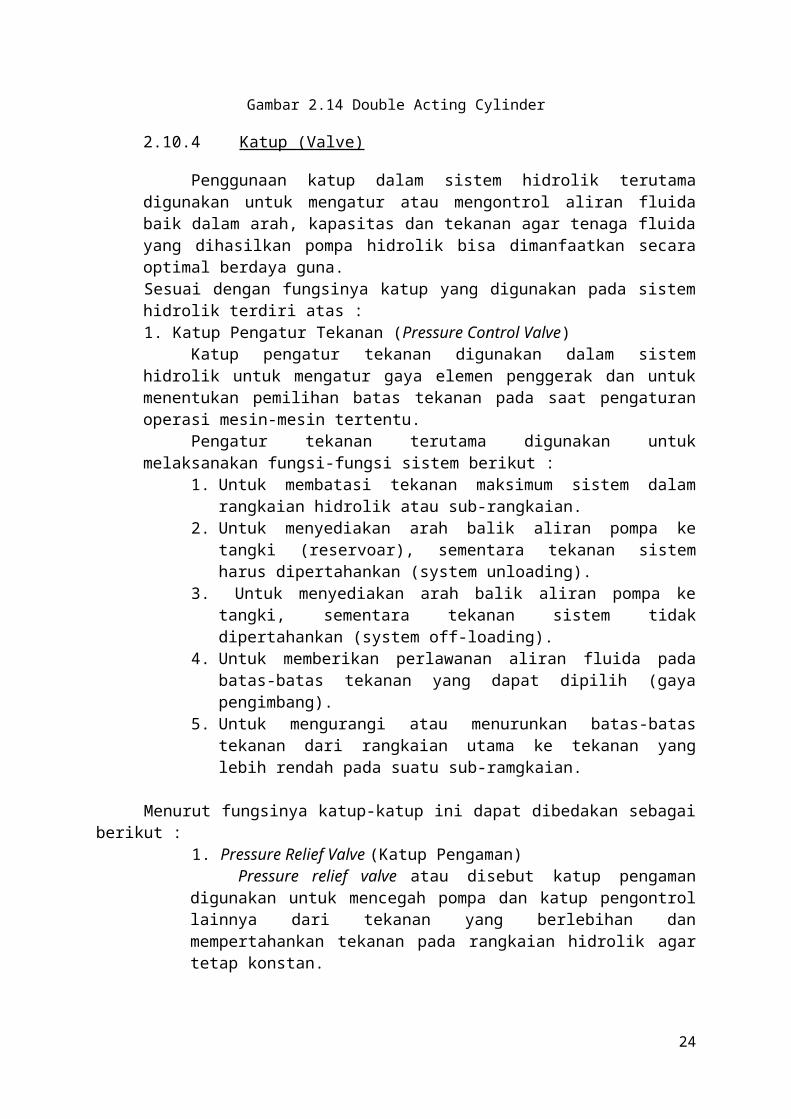
Gambar 2.14 Double Acting Cylinder
2.10.4 Katup (Valve)
Penggunaan katup dalam sistem hidrolik terutamadigunakan untuk mengatur atau mengontrol aliran fluidabaik dalam arah, kapasitas dan tekanan agar tenaga fluidayang dihasilkan pompa hidrolik bisa dimanfaatkan secaraoptimal berdaya guna. Sesuai dengan fungsinya katup yang digunakan pada sistemhidrolik terdiri atas :1. Katup Pengatur Tekanan (Pressure Control Valve)
Katup pengatur tekanan digunakan dalam sistemhidrolik untuk mengatur gaya elemen penggerak dan untukmenentukan pemilihan batas tekanan pada saat pengaturanoperasi mesin-mesin tertentu.
Pengatur tekanan terutama digunakan untukmelaksanakan fungsi-fungsi sistem berikut :
1. Untuk membatasi tekanan maksimum sistem dalamrangkaian hidrolik atau sub-rangkaian.
2. Untuk menyediakan arah balik aliran pompa ketangki (reservoar), sementara tekanan sistemharus dipertahankan (system unloading).
3. Untuk menyediakan arah balik aliran pompa ketangki, sementara tekanan sistem tidakdipertahankan (system off-loading).
4. Untuk memberikan perlawanan aliran fluida padabatas-batas tekanan yang dapat dipilih (gayapengimbang).
5. Untuk mengurangi atau menurunkan batas-batastekanan dari rangkaian utama ke tekanan yanglebih rendah pada suatu sub-ramgkaian.
Menurut fungsinya katup-katup ini dapat dibedakan sebagaiberikut :
1. Pressure Relief Valve (Katup Pengaman) Pressure relief valve atau disebut katup pengaman
digunakan untuk mencegah pompa dan katup pengontrollainnya dari tekanan yang berlebihan danmempertahankan tekanan pada rangkaian hidrolik agartetap konstan.
24
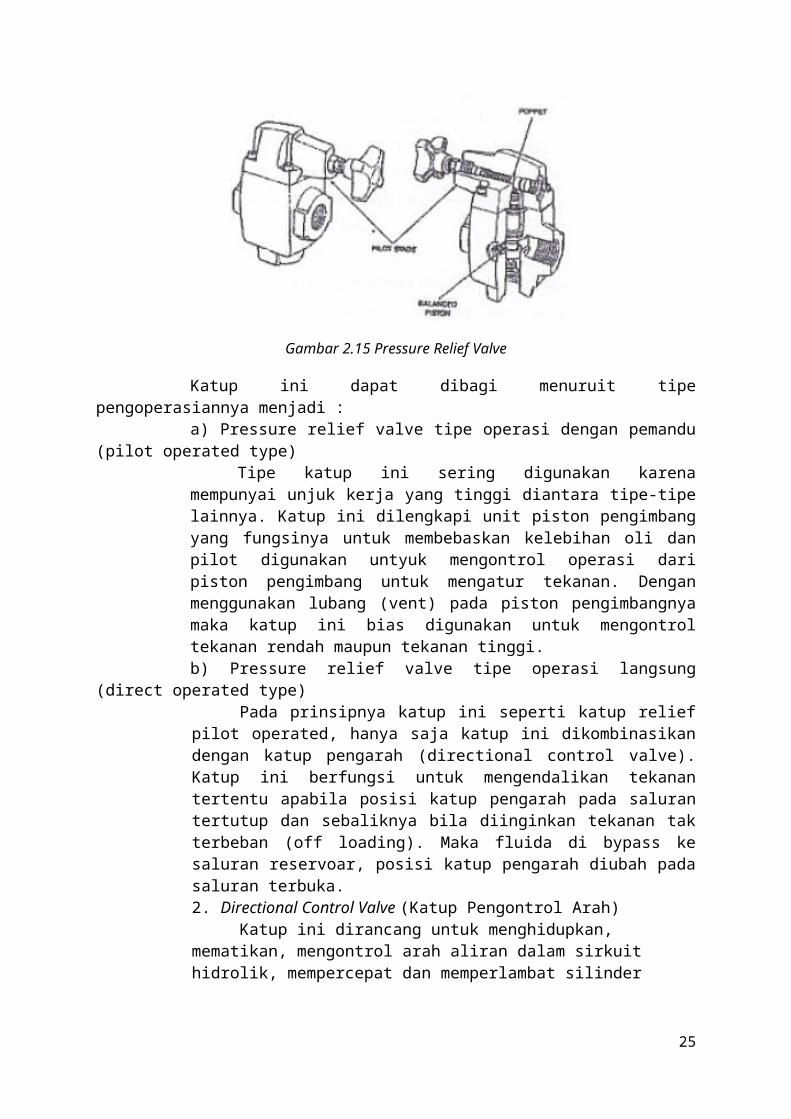
Gambar 2.15 Pressure Relief Valve
Katup ini dapat dibagi menuruit tipepengoperasiannya menjadi :
a) Pressure relief valve tipe operasi dengan pemandu(pilot operated type)
Tipe katup ini sering digunakan karenamempunyai unjuk kerja yang tinggi diantara tipe-tipelainnya. Katup ini dilengkapi unit piston pengimbangyang fungsinya untuk membebaskan kelebihan oli danpilot digunakan untyuk mengontrol operasi daripiston pengimbang untuk mengatur tekanan. Denganmenggunakan lubang (vent) pada piston pengimbangnyamaka katup ini bias digunakan untuk mengontroltekanan rendah maupun tekanan tinggi. b) Pressure relief valve tipe operasi langsung
(direct operated type) Pada prinsipnya katup ini seperti katup relief
pilot operated, hanya saja katup ini dikombinasikandengan katup pengarah (directional control valve).Katup ini berfungsi untuk mengendalikan tekanantertentu apabila posisi katup pengarah pada salurantertutup dan sebaliknya bila diinginkan tekanan takterbeban (off loading). Maka fluida di bypass kesaluran reservoar, posisi katup pengarah diubah padasaluran terbuka.2. Directional Control Valve (Katup Pengontrol Arah)
Katup ini dirancang untuk menghidupkan, mematikan, mengontrol arah aliran dalam sirkuit hidrolik, mempercepat dan memperlambat silinder
25
maupun motor hidrolik. Katup ini digunakan untuk berbagai pemakaian dan mempunyai banyak jenis.
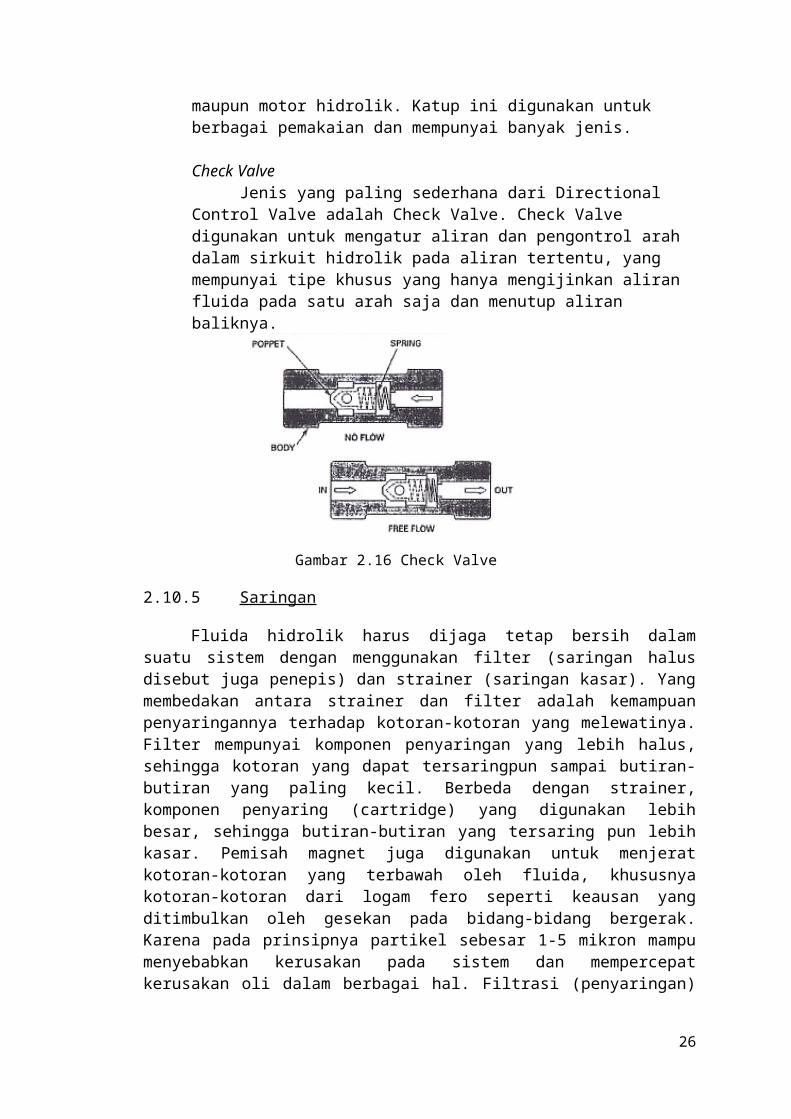
Check Valve Jenis yang paling sederhana dari Directional
Control Valve adalah Check Valve. Check Valve digunakan untuk mengatur aliran dan pengontrol arah dalam sirkuit hidrolik pada aliran tertentu, yang mempunyai tipe khusus yang hanya mengijinkan aliran fluida pada satu arah saja dan menutup aliran baliknya.
Gambar 2.16 Check Valve
2.10.5 Saringan
Fluida hidrolik harus dijaga tetap bersih dalamsuatu sistem dengan menggunakan filter (saringan halusdisebut juga penepis) dan strainer (saringan kasar). Yangmembedakan antara strainer dan filter adalah kemampuanpenyaringannya terhadap kotoran-kotoran yang melewatinya.Filter mempunyai komponen penyaringan yang lebih halus,sehingga kotoran yang dapat tersaringpun sampai butiran-butiran yang paling kecil. Berbeda dengan strainer,komponen penyaring (cartridge) yang digunakan lebihbesar, sehingga butiran-butiran yang tersaring pun lebihkasar. Pemisah magnet juga digunakan untuk menjeratkotoran-kotoran yang terbawah oleh fluida, khususnyakotoran-kotoran dari logam fero seperti keausan yangditimbulkan oleh gesekan pada bidang-bidang bergerak.Karena pada prinsipnya partikel sebesar 1-5 mikron mampumenyebabkan kerusakan pada sistem dan mempercepatkerusakan oli dalam berbagai hal. Filtrasi (penyaringan)
26

fluida hidrolik adalah merupakan hal yang paling pentinguntuk memelihara fungsi dan ketahanan sistem hidrolik.
Gambar 2.17 Strainer
2.11 Sirkuit Hidrolik
Sirkuit hidrolik merupakan gabungan komponen sepertipompa, aktuator, katup dan sistem perpipaan yang disusunsedemikian rupa sehingga dapat melakukan tugas seperti yangdiinginkan. Bila merancang atau menganalisa suatu sirkuithidrolik, tiga hal berikut harus dipertimbangkan dengan baik :
1. Keselamatan operasi. 2. Kinerja dari fungsi yang diinginkan. 3. Efisiensi pengoperasian.Sirkuit hidrolik biasanya dikembangkan dengan menggunakan
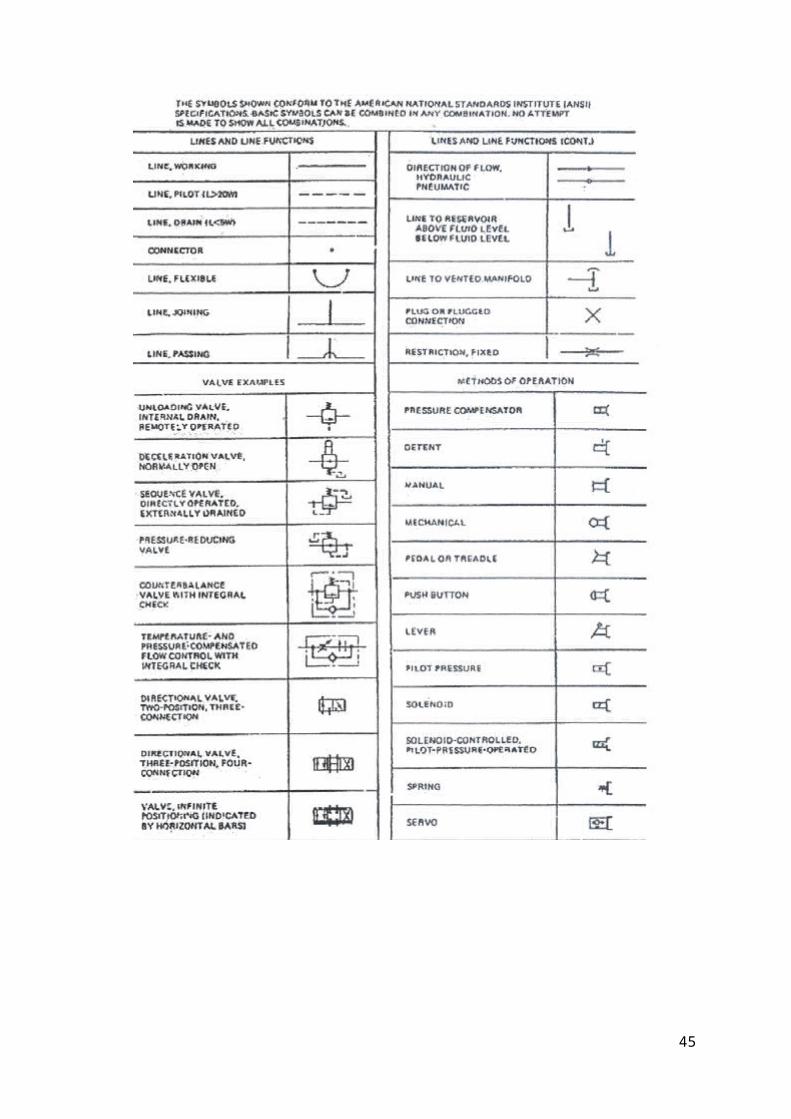
simbol grafis dari semua komponen yang ada. Oleh karena itu,perlu dipahami terlebih dahulu jenis-jenis simbol yangdigunakan sebelum mempelajari sirkuit hidrolik.
Gambar 2.18 Sirkuit Hidrolik
27
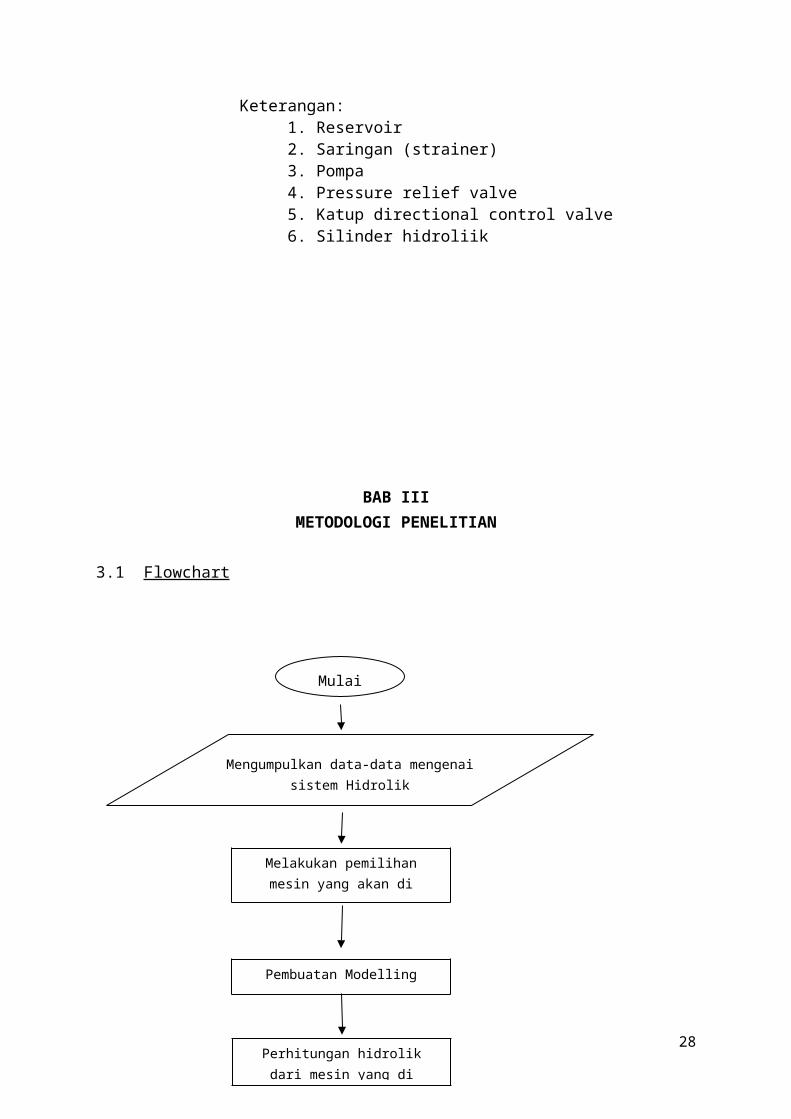
Keterangan: 1. Reservoir 2. Saringan (strainer) 3. Pompa 4. Pressure relief valve 5. Katup directional control valve 6. Silinder hidroliik
BAB IIIMETODOLOGI PENELITIAN
3.1 Flowchart
28
Melakukan pemilihanmesin yang akan di
analisa
Mengumpulkan data-data mengenai sistem Hidrolik
Pembuatan Modelling
Perhitungan hidrolikdari mesin yang di
Mulai
Gambar 3.1 Flowchart
BAB IVHASIL DAN PEMBAHASAN
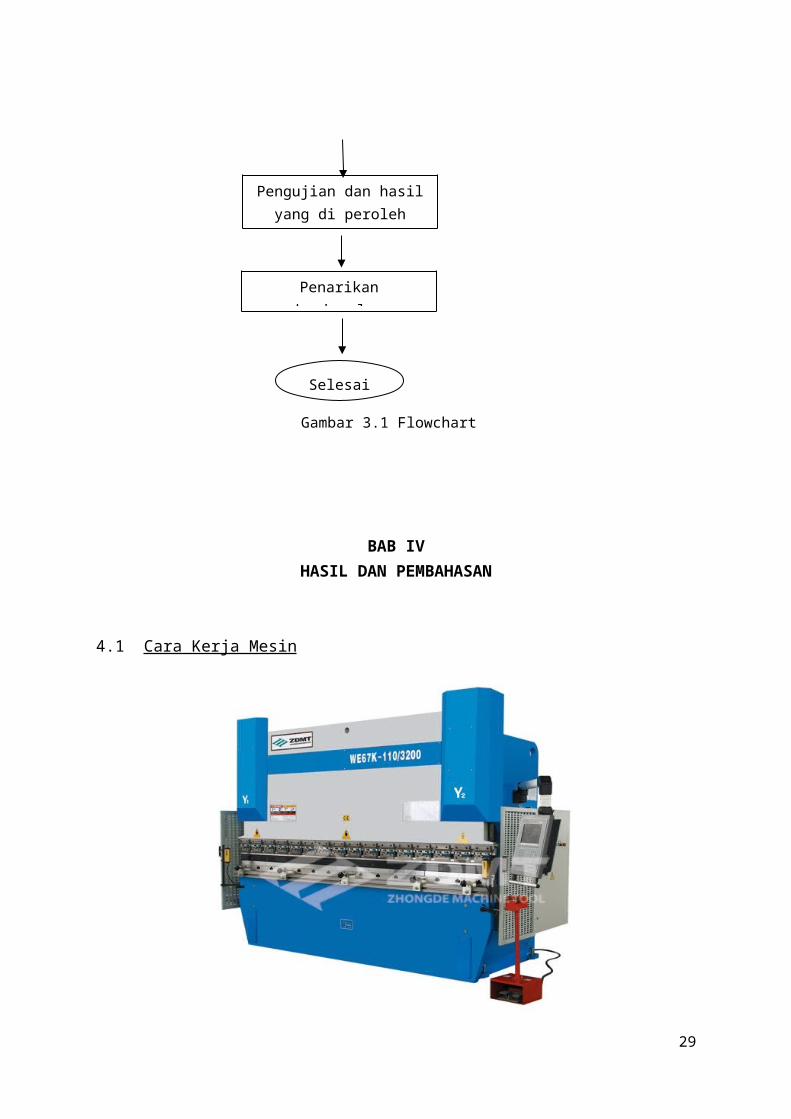
4.1 Cara Kerja Mesin
29
Pengujian dan hasilyang di peroleh
Penarikankesimpulan
Selesai
Gambar 4.1 Press Brake Machine
Pada saat aliran listrik di alirkan, maka arus listrikmengalir ke motor sehingga motor berputar. Putaran motor inidihubungkan ke pompa melalui kopling, dan pompa ikut berputarsesuai putaran motor. Dengan berputarnya pompa maka fluidamengalir dari reservoir melewati strainer menuju pompa, danselanjutnya keluar dari pompa melalui saluran out put. Fluidamengalir terus melalui hose menuju katup kontrol arah (di siniarah aliran fluida tidak bisa berbalik), setelah keluar darikatup kontrol arah maka fluida masuk ke pressure relief valveyang dilengkapi dengan pressure gauge untuk mengukurtekanannya. Pada pressure relief valve tekanan aliran fluidadapat diatur sesuai kebutuhan dengan memutar handle pengaturyang ada sesuai petunjuk pengoperasian. Dari pressure reliefvalve fluida mengalir menuju directional control valve , di sinialiran fluida diatur untuk menggerakkan silinder aktuator naikatau turun. Pada saat handel kaki di tekan ke bawah, fluidamengalir dari port P menuju port A dan selanjutnya masuktabung silinder tekan untuk mendorong piston maju untukmenekan Pelat. Di sini port B terhubung dengan port T,sehingga fluida yang ada di depan piston dan hose akanmengalir menuju reservoir. Setelah pelat yang di tekanbengkok,proses selesai kemudian handle kaki di tekan ke atassehingga port P terhubung dengan port B, sedangkan port Tterhubung dengan port A. Pada posisi ini aliran fluida adalahuntuk menggerakkan piston naik menuju ke posisi semula. aliranfluida yang terjadi pada kedua silinder adalah sama.
4.2 Data-data Hidrolik
Untuk memulai perhitungan hendaknya diketahui dahuludata-data yang telah ada diantaranya
Fluida Jenis fluida : SAE 10W Densitas fluida : 900kg/
30
Berat jenis fluida :
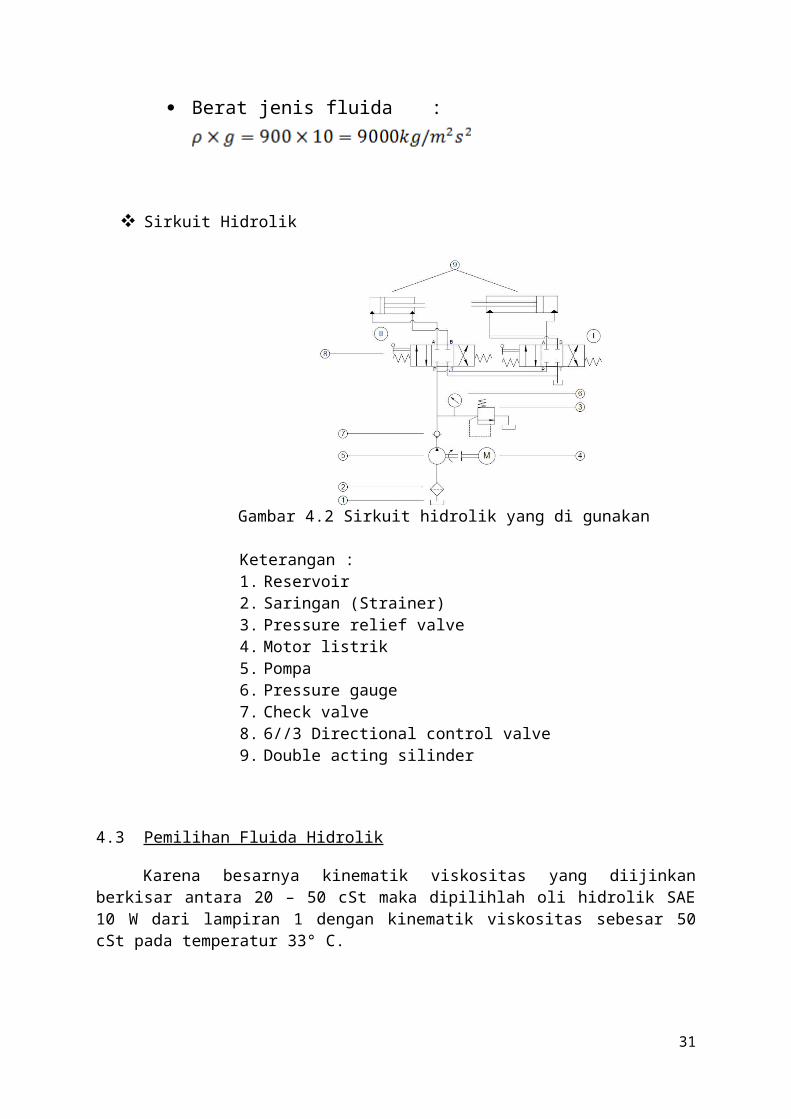
Sirkuit Hidrolik
Gambar 4.2 Sirkuit hidrolik yang di gunakan
Keterangan :1. Reservoir2. Saringan (Strainer)3. Pressure relief valve4. Motor listrik5. Pompa6. Pressure gauge7. Check valve8. 6//3 Directional control valve9. Double acting silinder
4.3 Pemilihan Fluida Hidrolik
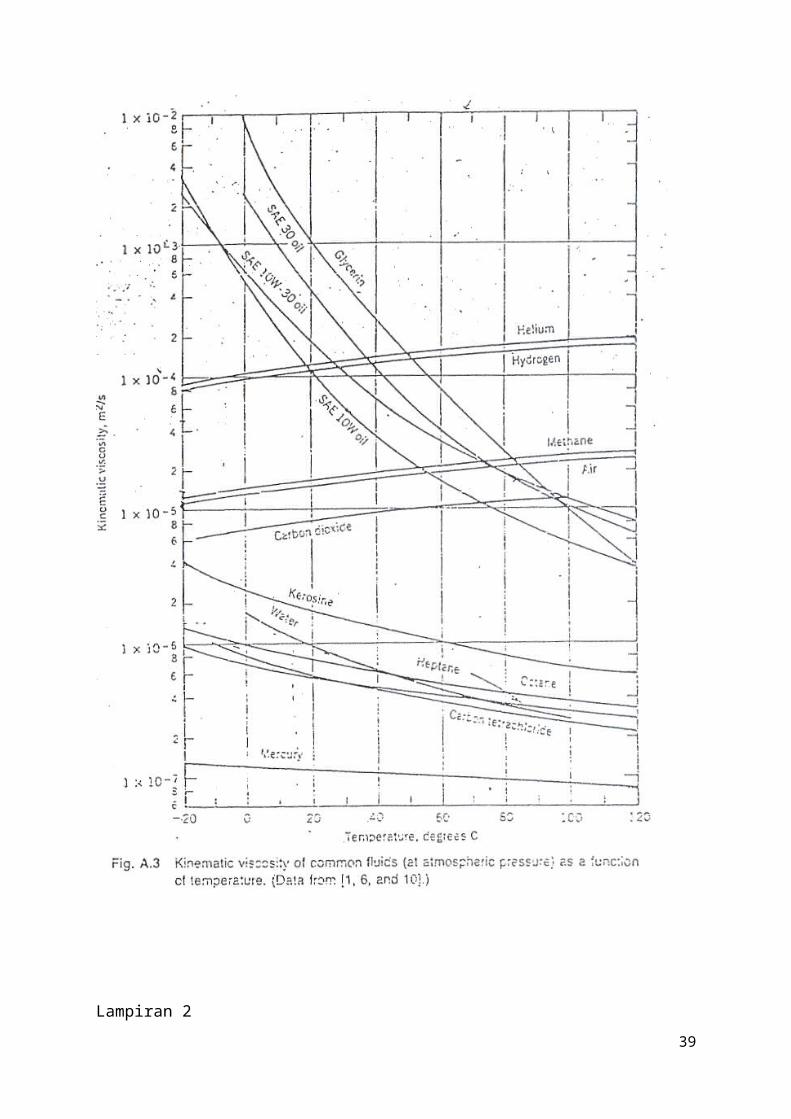
Karena besarnya kinematik viskositas yang diijinkanberkisar antara 20 – 50 cSt maka dipilihlah oli hidrolik SAE10 W dari lampiran 1 dengan kinematik viskositas sebesar 50cSt pada temperatur 33° C.
31
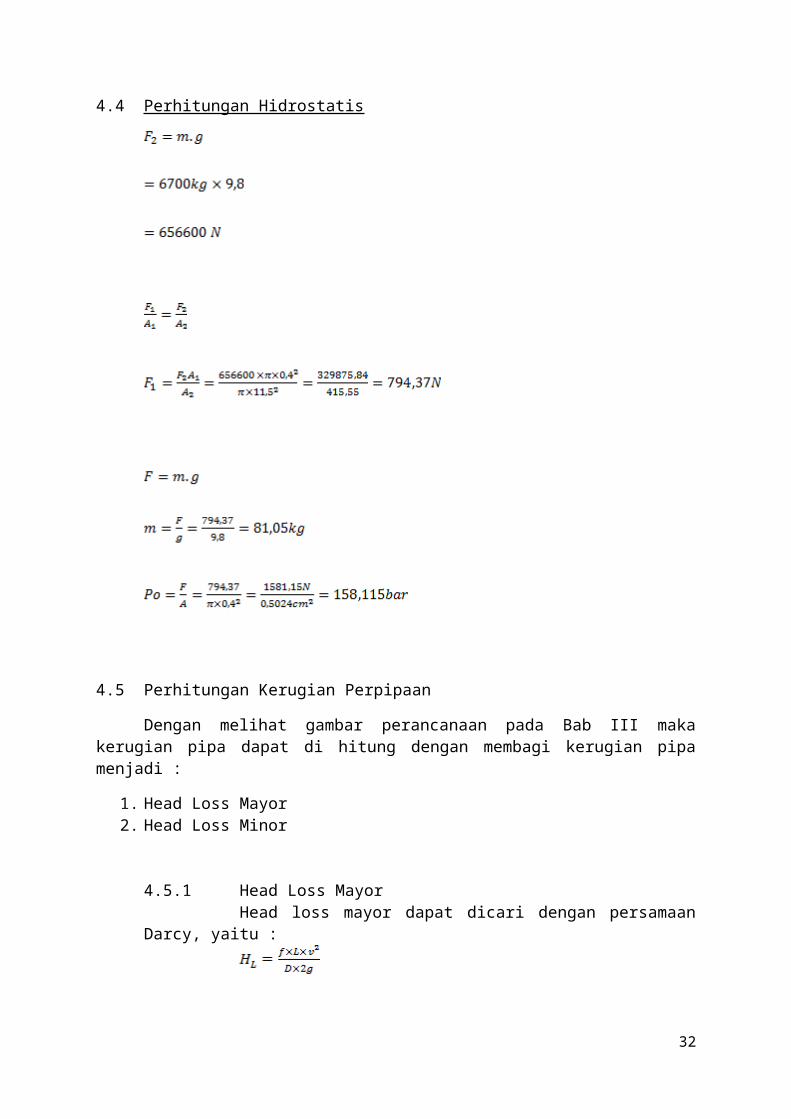
4.4 Perhitungan Hidrostatis
4.5 Perhitungan Kerugian Perpipaan
Dengan melihat gambar perancanaan pada Bab III makakerugian pipa dapat di hitung dengan membagi kerugian pipamenjadi :
1. Head Loss Mayor2. Head Loss Minor
4.5.1 Head Loss MayorHead loss mayor dapat dicari dengan persamaan
Darcy, yaitu :
32
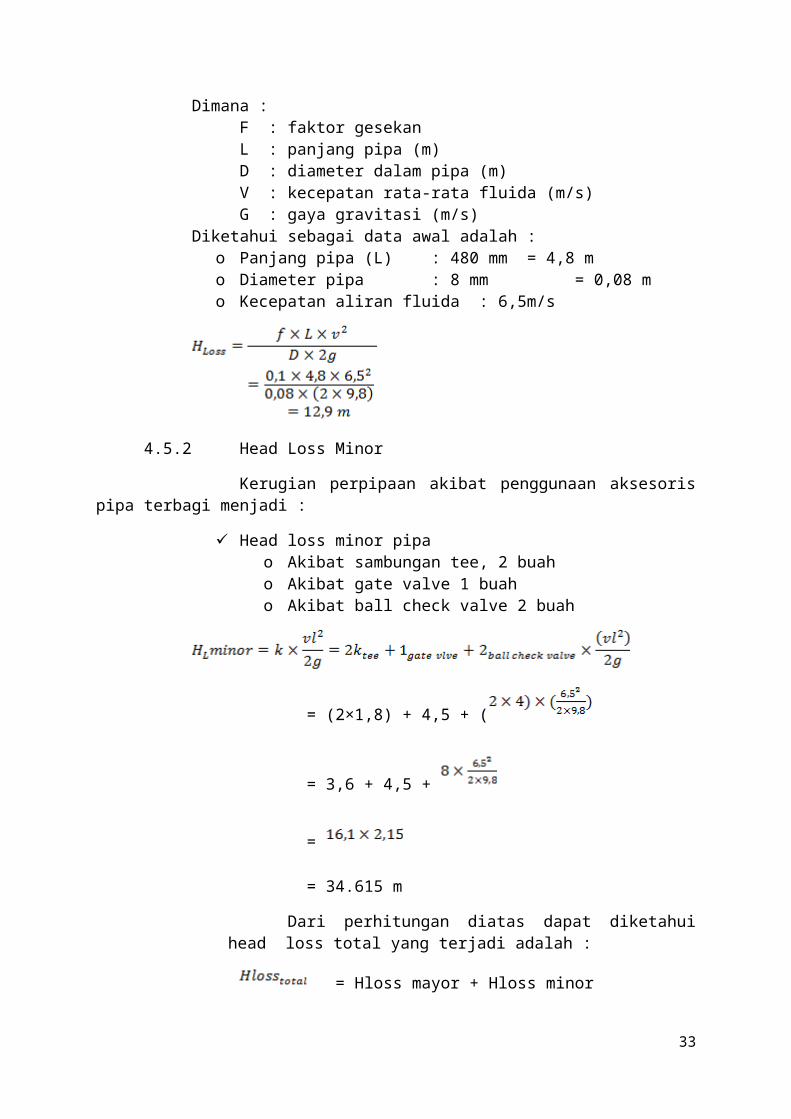
Dimana :F : faktor gesekanL : panjang pipa (m)D : diameter dalam pipa (m)V : kecepatan rata-rata fluida (m/s)G : gaya gravitasi (m/s)
Diketahui sebagai data awal adalah :o Panjang pipa (L) : 480 mm = 4,8 mo Diameter pipa : 8 mm = 0,08 mo Kecepatan aliran fluida : 6,5m/s
4.5.2 Head Loss Minor
Kerugian perpipaan akibat penggunaan aksesorispipa terbagi menjadi :
Head loss minor pipao Akibat sambungan tee, 2 buaho Akibat gate valve 1 buaho Akibat ball check valve 2 buah
= (2×1,8) + 4,5 + (
= 3,6 + 4,5 +
=
= 34.615 m
Dari perhitungan diatas dapat diketahuihead loss total yang terjadi adalah :
= Hloss mayor + Hloss minor
33
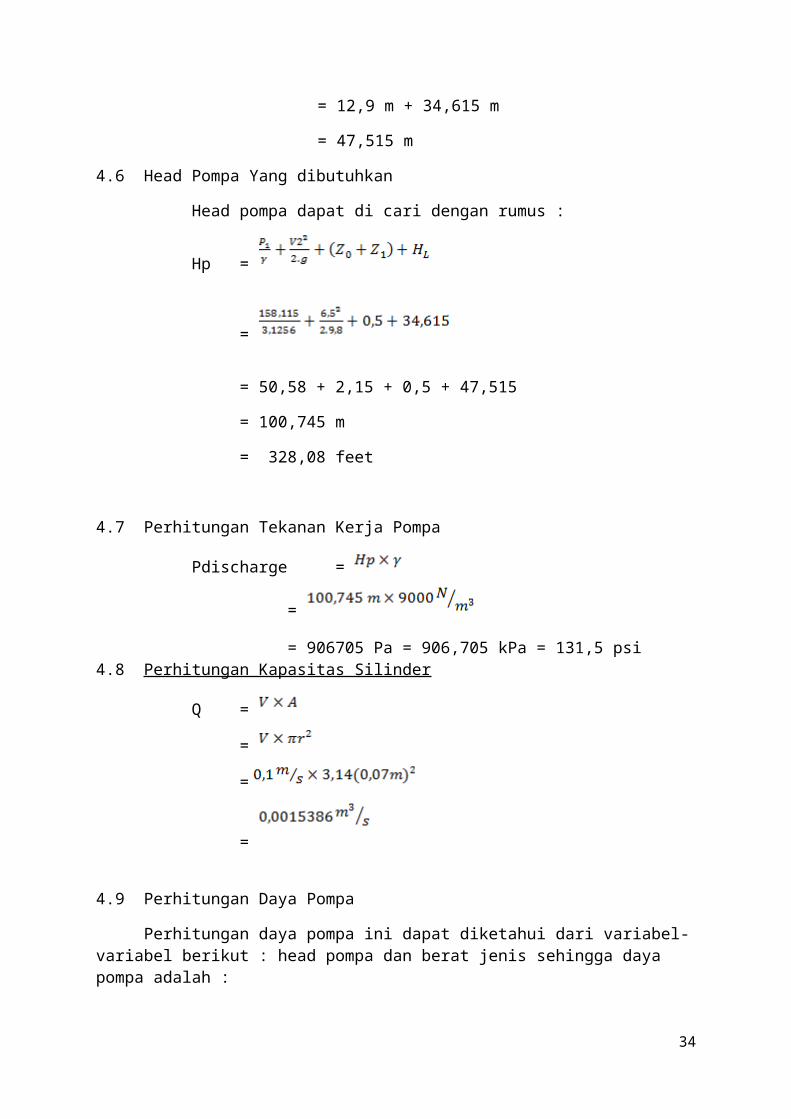
= 12,9 m + 34,615 m
= 47,515 m
4.6 Head Pompa Yang dibutuhkan
Head pompa dapat di cari dengan rumus :
Hp =
=
= 50,58 + 2,15 + 0,5 + 47,515
= 100,745 m
= 328,08 feet
4.7 Perhitungan Tekanan Kerja Pompa
Pdischarge =
=
= 906705 Pa = 906,705 kPa = 131,5 psi4.8 Perhitungan Kapasitas Silinder
Q =
=
=
=
4.9 Perhitungan Daya Pompa
Perhitungan daya pompa ini dapat diketahui dari variabel-variabel berikut : head pompa dan berat jenis sehingga daya pompa adalah :
34
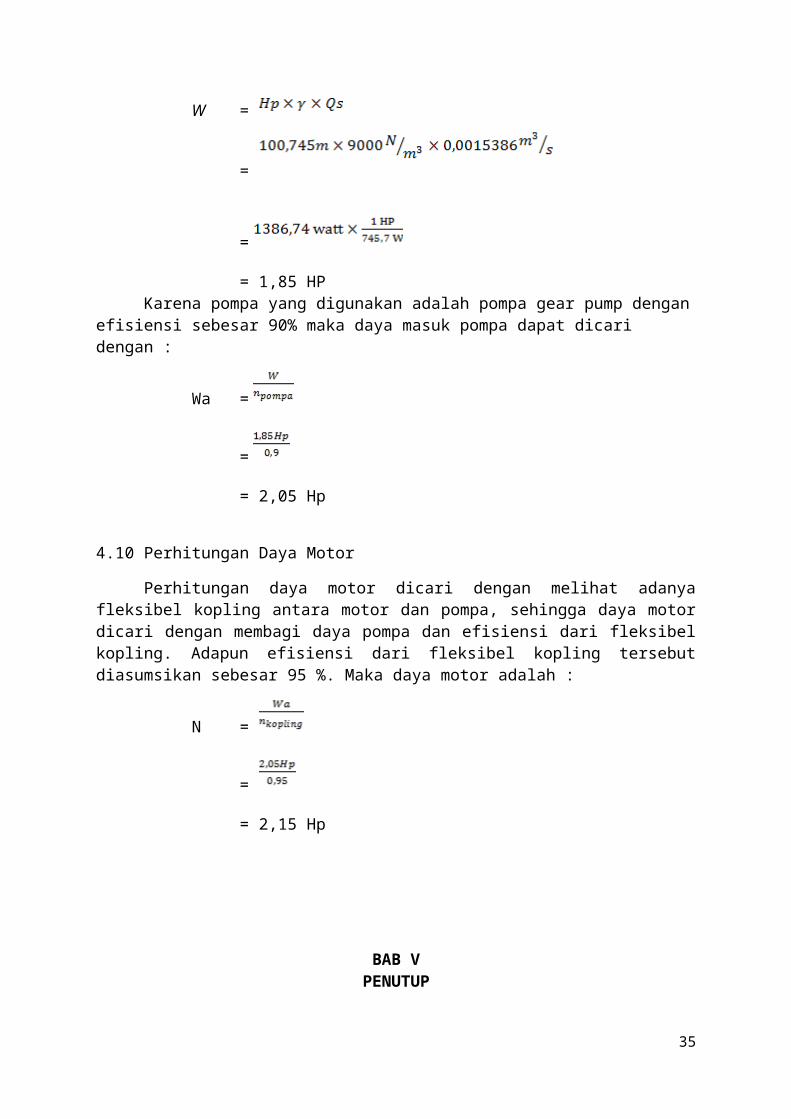
W =
=
=
= 1,85 HPKarena pompa yang digunakan adalah pompa gear pump dengan
efisiensi sebesar 90% maka daya masuk pompa dapat dicari dengan :
Wa =
=
= 2,05 Hp
4.10 Perhitungan Daya Motor
Perhitungan daya motor dicari dengan melihat adanyafleksibel kopling antara motor dan pompa, sehingga daya motordicari dengan membagi daya pompa dan efisiensi dari fleksibelkopling. Adapun efisiensi dari fleksibel kopling tersebutdiasumsikan sebesar 95 %. Maka daya motor adalah :
N =
=
= 2,15 Hp
BAB VPENUTUP
35
5.1 Kesimpulan
Dari hasil perhitungan yang telah dilakukan, akhirnya dapat di ambil kesimpulan :
1. Untuk silinder tekan di butuhkan tekanan sebesar 794,37 N2. Tekanan yang terdapat pada selang yaitu sebesar 158,115
bar3. Di gunakan motor listrik sebesar 2,15 hp
5.2 Saran
Mesin ini adalah mesin yang pertama yang kami analisa sistem hidroliknya, oleh karena itu banyak hal yang perlu di perbaiki, diantaranya sebagai berikut :
1. Ukuran dari setiap part belum begitu detail.2. Belum semua perhitungan hidrolik kami gunakan
dikarenakan keterbatasan waktu dan ilmu pengetahuan mengenai hidrolik.
36
DAFTAR PUSTAKA
[1] http://mesinfabrikasi.blogspot.com/2013/04/mesin-press-brake-bending-plat-tekuk.html
[2] http://sistemhidrolik.blogspot.com/2013/02/pengertian-sistem-hidrolik.html
[3] http://id.wikipedia.org/wiki/Hukum_Pascal
[4 Esposito,A nthony. Fluid Power With Application. Miami University, Oxford, Prentice Hall. Ohio. 2003
[5] http://lontar.ui.ac.id/file?file=digital/123740-R220841-Analisa%20efek-Literatur.pdf
37
Lampiran 1Viskositas Kinematik
38
Lampiran 239
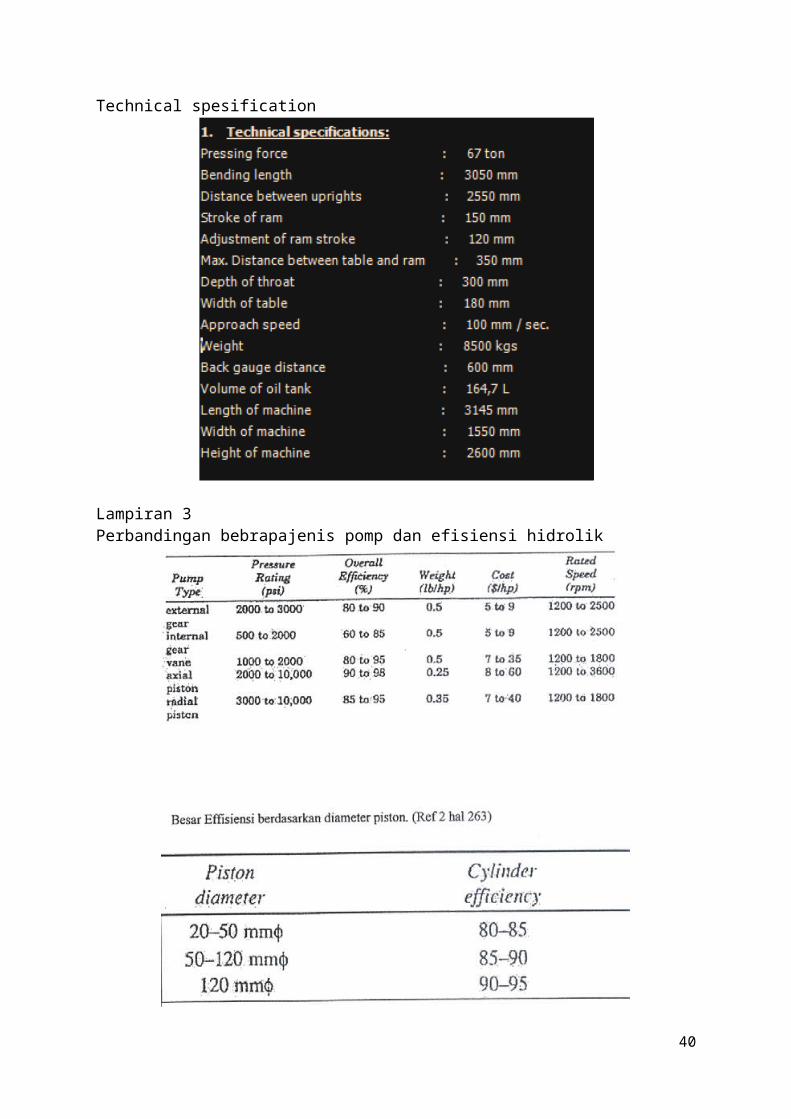
Technical spesification
Lampiran 3Perbandingan bebrapajenis pomp dan efisiensi hidrolik
40
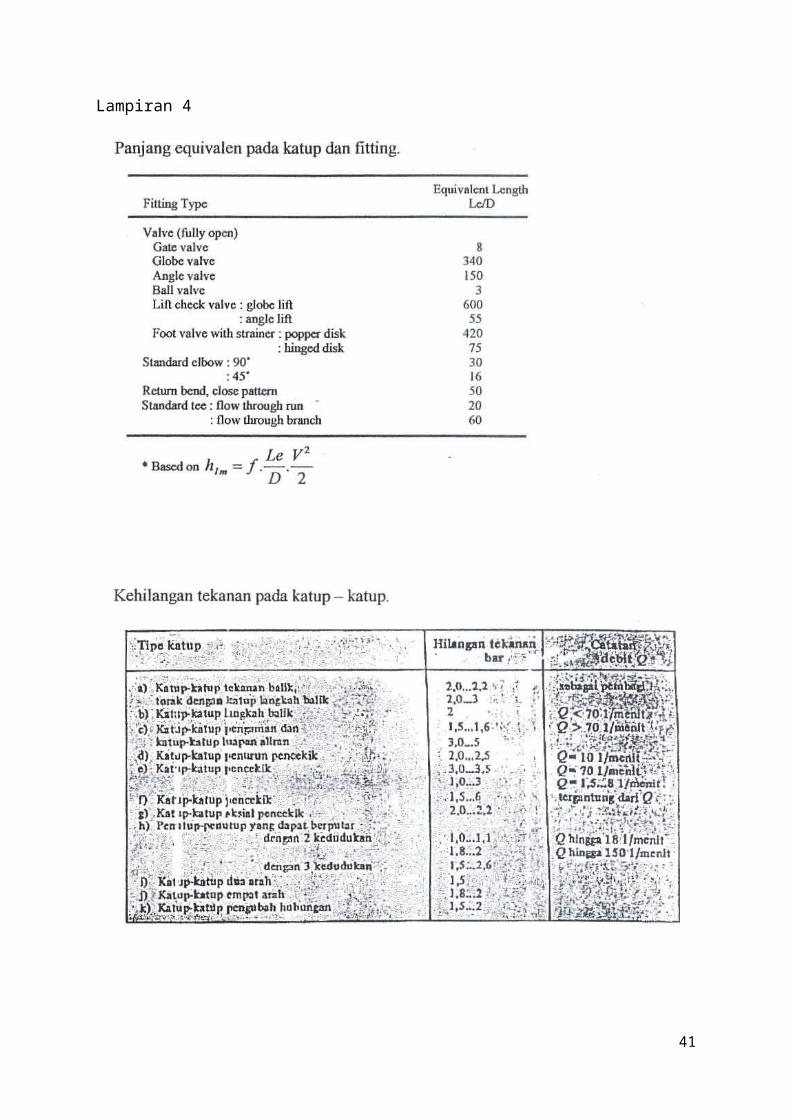
Lampiran 4
41
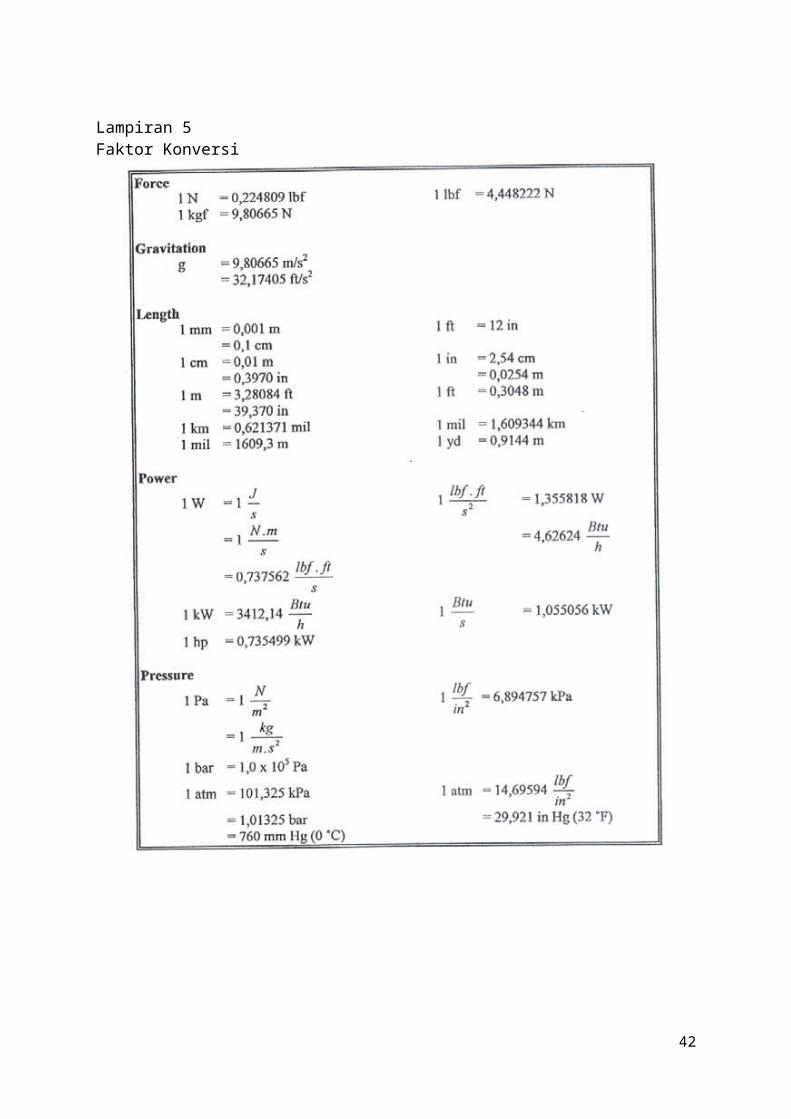
Lampiran 5Faktor Konversi
42
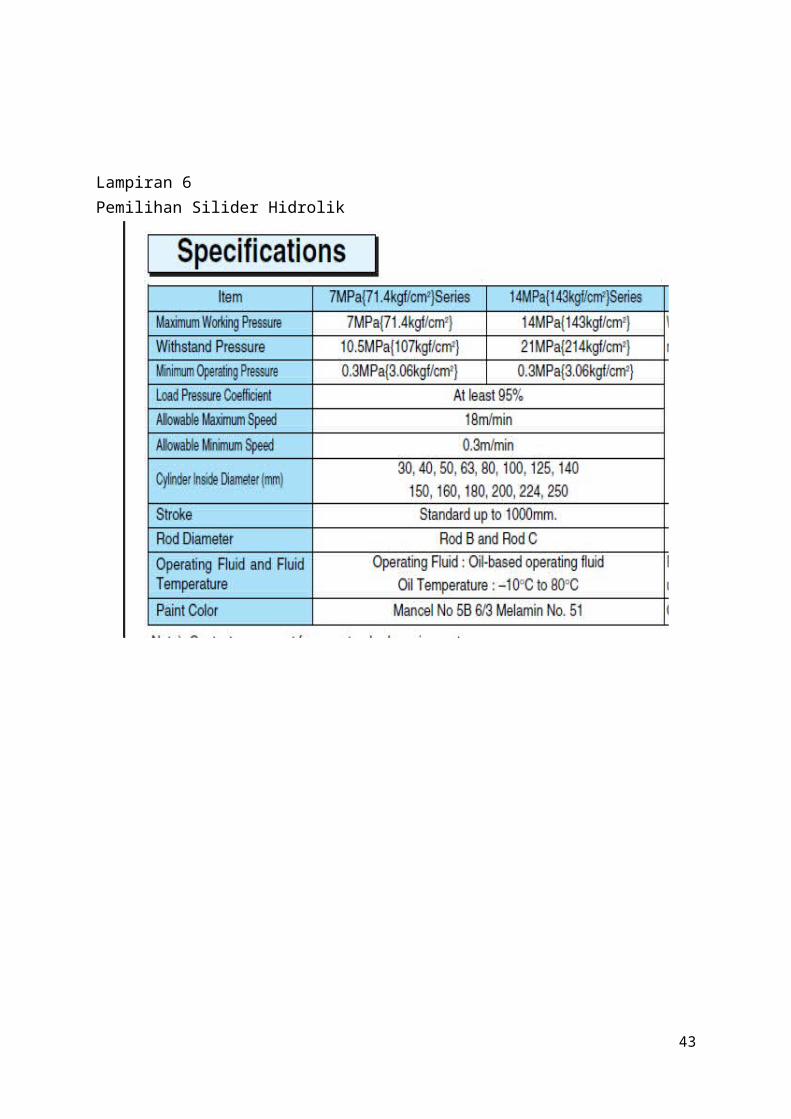
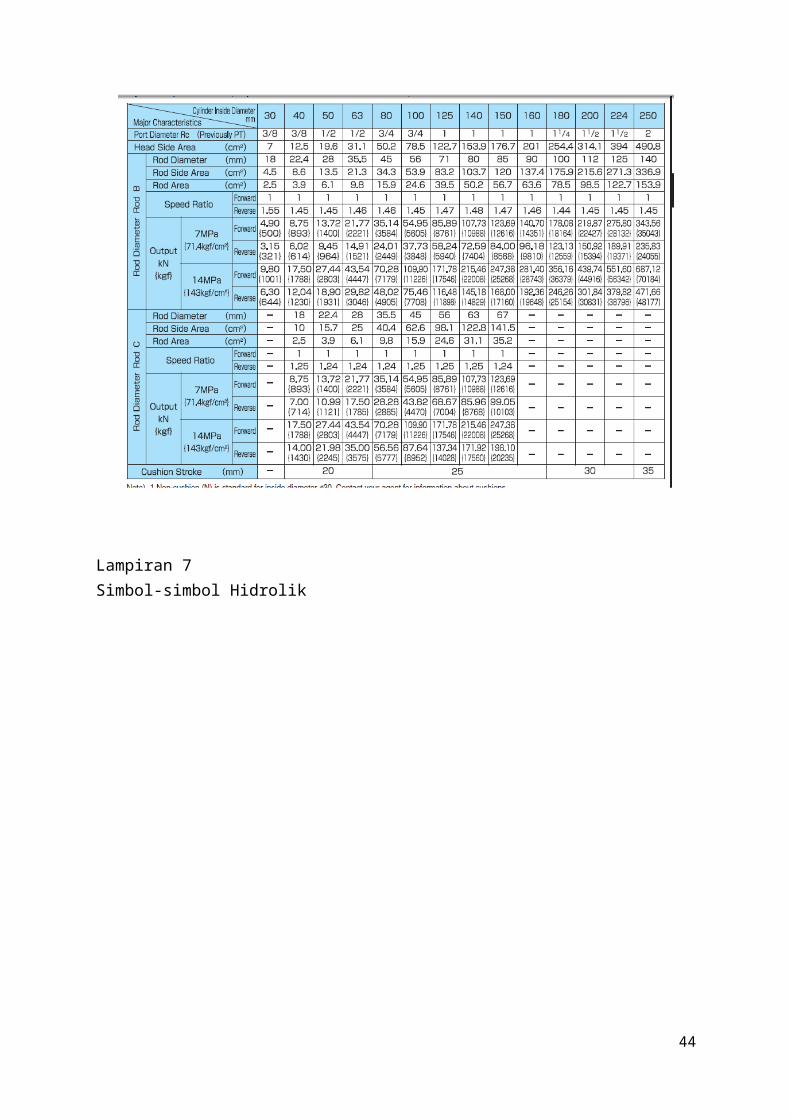
Lampiran 6Pemilihan Silider Hidrolik
43
Lampiran 7Simbol-simbol Hidrolik
44
45
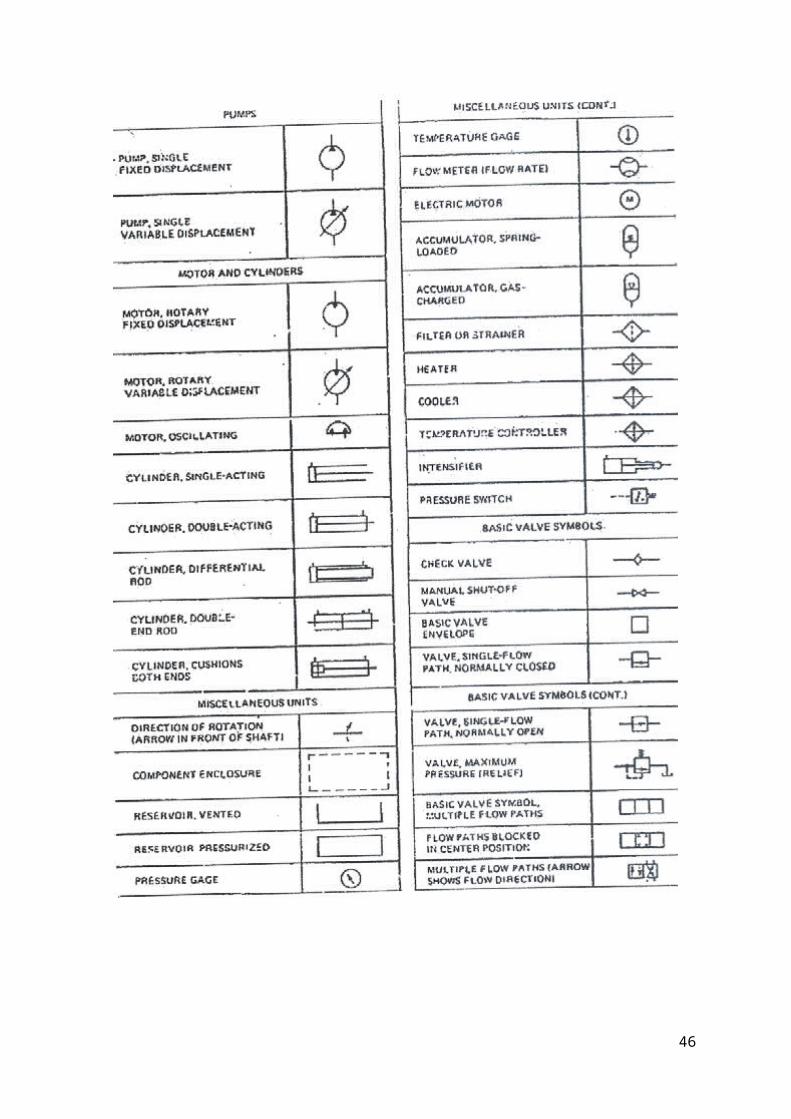
46