in-core sensors diagnostics
TRANSCRIPT

8th
Meeting of the Halden On/Line Monitoring User Group (HOLMUG)
ENEA Casaccia Research Center - Rome, Italy, Oct. 18th
- 19th
2012
1
IN-CORE SENSORS DIAGNOSTICS BASED ON
CORRELATION AND NEURO-FUZZY TECHNIQUES
(SUMMARY OF LONG TIME EFFORT)
STEFAN FIGEDY
Department of diagnostic systems, VUJE,a.s., Okruzna 5, Trnava 91864, Slovak Rep. ([email protected])
In this work 2 non-traditional types of nuclear reactor in-core sensor validation methods
are outlined. The first one is based on combination of correlation coefficients and mutual
information indices, which reflect the correlation of signals in linear and nonlinear
regions. The method may be supplemented by wavelet transform based signal features
extraction and pattern recognition by artificial neural networks and also fuzzy logic based
decision making. The second one, supported by neuro-fuzzy system PEANO, is based on
modeling of residuals between the experimental values and their theoretical counterparts
obtained from the reactor core simulator calculations.
1. Introduction
This work started within the OECD Halden Reactor Project joint research
program effort to investigate the potential of application of new and innovative
computational intelligence based techniques for core monitoring with the aim
to provide complementary or new information as well as supporting evidence by
integrating diverse methods. For in-core sensors signal validation the Halden
Project's neuro-fuzzy system PEANO [1-4] was chosen. Originally it was
developed for various process parameters validation, like power, pressures,
temperatures, flows, water levels etc. It is a very challenging task to use it for
signal validation of in-core sensors, as its training would normally have to be
done each fuel cycle for ever changing fuel load patterns and burn up of both
fuel and self-powered neutron detectors emitters. To overcome this difficulty,
the idea arose to train PEANO to residuals, i.e. the differences between the core
simulator physics code results and their experimental counterpart values. It was
expected that the residuals implicitly incorporate the reactor core physics
parameters such as the fuel load pattern and both fuel and SPND emitters burn
up, whereas they are supposed to depend on the effective days values, control

2
rods position, power, and maybe only few other parameters. The authors
hopped that the system trained to residuals can be used in the next fuel cycles
without having to be retrained. The aim of this work was to experimentally
verify if this assumption holds. Nevertheless, this idea requires a lot of training
data acquired simultaneously from both physics code and in-core sensors over a
long time period to cover possibly all situations in the reactor core and therefore
in the meantime we decided to investigate another method based on correlation
between the in-core sensors. For this task we had already acquired enough data
in some other project. This approach, which is based only on the sensor
readings, does not require the prior training over the long time periods.
This paper’s purpose is to summarize the considerably long time effort in
development of and give some recommendations to the new in-core sensor
validation methods for both self-powered neutron detectors (SPNDs) and
thermocouples (TCs), which might be used as the alternative and supplementary
techniques to the classical ones.
2. Correlation Based Diagnostics
Traditionally, the SPND in-core sensors readings validation is based on a
combination of limit checking and statistical treatment of deviations from
somehow constructed axial-wise or layer-wise reference distributions. In the
case of the WWER-440 reactors, the DPZ-1m sensors with rhodium emitters are
used to measure the 3D power distribution in the reactor core. In our work we
want to test the mutual similarity of signals’ prompt components. It is assumed
that decreasing similarity of signals is the manifestation of a sensor failure.
The method is based on combination of correlation coefficients and mutual
information indices, which reflect the correlation of signals in linear and
nonlinear regions respectively. This part of the work was presented at
NPIC&HMIT’2006 [5] and is summarized in this paper for the sake of
completeness.
2.1. Linear correlation coefficients based criteria
The basic idea of using the cross-correlation between the SPNDs for validation
task comes from the notion that the process noise components in the signals are
satisfactorily correlated within some groups of the well functioning sensors.
This noise component is caused by perturbations in the reactor core, which
result in neutron flux fluctuations. Among the most important to mention are
e.g. fluctuations in temperature, pressure, flow, and fuel rod vibrations. The
lack of such correlation occurs most probably due to some detector failure. This

3
21
2
,
2
,
2
,
2
,
,,,,
11
1
t t
tijtij
t t
tjtj
t t
tij
t
tjtijtj
ij
mT
mmT
m
mmT
mm
C
part of our work is based on a layer-wise linear correlation coefficients of fixed
in-core detectors [6], in which the basic assumption was that most of the
perturbations in a nuclear reactor core affect the layers of the core containing the
in-core sensors and that these perturbations are characteristically correlated.
Typically, the SPND detectors are arranged in several (suppose J) detector
layers perpendicular to the axial coolant flow in the core with supposed I
detectors in each layer, all resulting in I∙(I-1)/2 correlation coefficients for each
layer. In the case of WWER-440 reactors the layout of SPNDs consists of 7
layers, each containing 36 detectors. To decrease the requirements for
calculations, it is proposed in [6] to correlate every detector reading with only
the average of the readings over the layer where the detector resides. Even more,
the layer average is calculated with the detector itself included. It is supposed to
be justifiable only for enough detectors in the layer. As it is mentioned in [6], it
would be more exact to exclude the detector from the layer average. The layer-
wise linear correlation coefficient at position i of the j'th layer may be defined
as:
(1)
The summations over t are done over the discrete time points t=k∙Δt during
the time interval T. The symbol m j,t stands for the average of all i measurements
mij,t in the j'th layer at the time point t.
The Cij coefficients are random variables because they are created from the
measured values. They themselves, due to the superposed process noise, are
random variables. If all sensors work properly, we can suppose that all
correlation coefficients come from the same statistical distribution. On the other
hand, the coefficient Cij of a failed sensor will unlikely be subject to the same
distribution. The task of a diagnostic system will then be a hypothesis testing
that the coefficient(s) in question contradict(s) the distribution of the majority.
The statistical distribution of correlation coefficients is skewed far from the
normal distribution to be possible to use immediately its confidence levels and
quantiles for testing. For this case we can use Fisher's z-transformation [6],
which transforms the distribution of linear correlation coefficients into a near
normal one:

4
ij
ij
ijijC
CzCZ
1
1ln
2
1 (2)
For hypothesis testing in [6] a one-sided confidence level is chosen:
da
k
0
2
2
~2
~exp
2~1
(3)
, where k is the a priori chosen probability (confidence level) of discarding a
correct signal and ξ0 defines the threshold (quantile), above which the zij values
will be accepted. It is important to note that estimates of both the mean value a~
and standard deviation ~ are layer dependent and thus quantiles ξ0 are
calculated independently for each layer.
2.2. Entropy and mutual information based criteria
The concept of mutual information [7,8,9,10] is based on the information theory
developed by Claude Shannon and mainly based on the so-called Shannon’s
entropy. Let's define an event x as some interval of values of the data and
divide the range of data values into some number of intervals. The data is then
binned by assigning each data point to one of the intervals. Let's then define the
probability P(x) for each interval as the probability of the data point to fall into
the interval x. The entropy for variable X is then defined as follows:
xPxPXHx
2log (4)
Let's now consider another variable Y for which we can compute its entropy
H(Y). Further the concept of entropy is extended to include the case of a pair of
events, x and y. The joint entropy H(X,Y) is based on calculation of joint
probabilities P(x,y) = P(X=x and Y=y) and is defined similarly as:
yxPyxPYXHyx
,log,, 2
,
(5)
In this work we used the normalized variant of mutual information U(X,Y):
YHXH
YXHYHXHYXUU ij
,2, (6)
5
Mutual information is a measure of the dependence between random
variables. It is always non-negative and zero if and only if the variables are
statistically independent. Unlike the correlation function, the mutual information
takes into account also nonlinear correlations. For two completely independent
variables U(X,Y) equals zero while for two completely dependent ones it equals
unity. It is to say that we originally intended to use the mutual information
analysis just as a support to the correlation coefficients approach recommended
in [6] due to its ability to reflect the nonlinear correlation between signals and
found some interesting behavior only later during the testing .
2.3. Experiences from testing
We have obtained a set of historical data files with signals of SPNDs over a
period of several months by the courtesy of Mochovce NPP in Slovakia. The
files contained the data logged with 8 sec sampling frequency. The length of the
time interval for computing correlation and mutual information coefficients was
T=30min to ensure that the statistical methods can be applied. For the start, to
test the behavior of the method, we used the confidence levels as proposed in
[6], namely for suspect level kS = 5x10-4
and for failure level kF = 10-5
. These
values were recommended as a trade-off between the sensitivity of the method
and the occurrence of spurious judgments.
As a standard, the already failed SPNDs were cut off from data logging and
there were zeros in place of their signals. Thus, we only could test the good
signals. Long testing by both correlation coefficients and mutual information
indices just confirmed that signals were correct as expected. Only very rare
warnings of suspect signals appeared when for some reason the correlation
between signals decreased in those respective periods T. The problem arose
when the signal of the 2nd
detector in the 21st probe appeared to have failed, see
Figure 1. To our surprise, signal 2/21 was labeled as failed only seldom. The
reason for this was that the layer-wise average was strongly influenced by this
heavily fluctuating signal and correlated well with it. Figure 2 shows the
correlation coefficients Cij in layer #2 with and without the signal 2/21 included
in the layer average calculation. It is obvious that its exclusion from the layer
average calculation improves the correlation of the rest of the sensors while the
sensor 2/21 itself does not correlate well, as expected. Nevertheless, the problem
for the diagnostic system remains because one would first have to label the
signal as suspicious what is in fact the goal of diagnostics itself. As mentioned
previously, one way would be to calculate the layer average always without the
signal being inspected. However, this is not only computationally more intensive

6
but may deteriorate the correlation of the other signals when the failed one,
which is not being checked at that given moment, is included in the layer
average. The result might be confusing and the diagnostic decisions less reliable.
Figure 1. An example of the failed signal 2/21
Figure 2. The influence of the failed signal 2/21 exclusion on correlation coefficient
0 2000 4000 6000 8000 10000 120000
0.5
1
1.5
2
2.5
samples
SP
ND
s r
eadin
gs
Probe #21
SPND #2

7
We have observed very interesting behavior of the mutual information
indices. Despite our expectations, the Uij indices were not affected by exclusion
of the failed signal from the layer average calculation. And even more, they
were much higher for the failed signal than for the other ones, see Figure 3
(note: Probe #17 signals were not available). Figure 3. The influence of the failed signal 2/21 exclusion on mutual information index
Because we do not know the real physical cause of the improper behavior of
the sensor 2/21 , our explanation is speculative only. As mentioned before, the
ever-present perturbations in the reactor core induce the neutron flux
fluctuations, which in result are the reason why the right, well functioning
sensor signal is a little bit noisy. The dependence of the signal noise on the
neutron flux fluctuations is obviously quite straightforward and supposedly
linear. All signals of right sensors fluctuate according to the fluctuating neutron
flux. Their exclusion/inclusion does not influence substantially the layer average
and has only little impact on correlation/ mutual information coefficients as was
confirmed experimentally. The other situation is in the case of a failed sensor,
having for example a cold junction between the emitter and the leading wire.
Then the sensor vibrations may affect its signal more severely. This process of
vibrations may amplify the signal fluctuations into a nonlinear region. The
mechanical vibrations of the reactor core structures and sensors are in
correlation with neutron flux fluctuations and concurrently in certain and
supposedly nonlinear link with the failed sensor’s signal. We suppose that this
5 10 15 20 25 30 35 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 layer #2 of SPNDs
probes
mutu
al in
form
atio
n
SPND #2/21excluded from layer mean
SPND #2/21 included in layer mean
8
mechanism is accountable for connection of the failed sensor signal to the rest
of the sensors, despite the fact that one would consider its signal so much
dissimilar to the good ones. Its exclusion from the layer average calculation has
little impact on the mutual information index, which inherently captures the
nonlinear similarity between the two quantities. But right due to this supposed
nonlinearity the correlation coefficient, which in general captures only the linear
dependencies, is influenced substantially when the failed sensor signal is
excluded from the layer average.
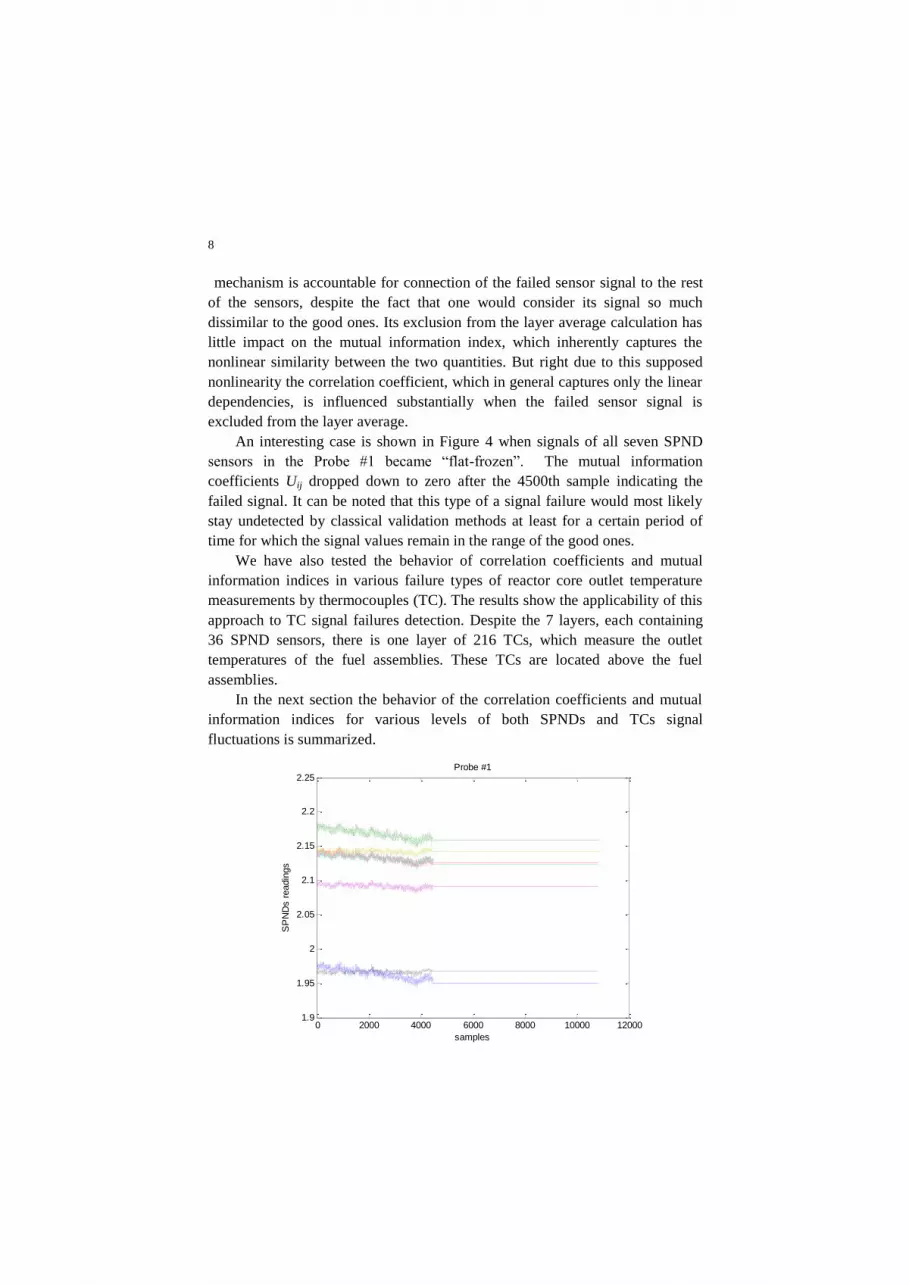
An interesting case is shown in Figure 4 when signals of all seven SPND
sensors in the Probe #1 became “flat-frozen”. The mutual information
coefficients Uij dropped down to zero after the 4500th sample indicating the
failed signal. It can be noted that this type of a signal failure would most likely
stay undetected by classical validation methods at least for a certain period of
time for which the signal values remain in the range of the good ones.
We have also tested the behavior of correlation coefficients and mutual
information indices in various failure types of reactor core outlet temperature
measurements by thermocouples (TC). The results show the applicability of this
approach to TC signal failures detection. Despite the 7 layers, each containing
36 SPND sensors, there is one layer of 216 TCs, which measure the outlet
temperatures of the fuel assemblies. These TCs are located above the fuel
assemblies.
In the next section the behavior of the correlation coefficients and mutual
information indices for various levels of both SPNDs and TCs signal
fluctuations is summarized.
0 2000 4000 6000 8000 10000 120001.9
1.95
2
2.05
2.1
2.15
2.2
2.25
samples
SP
ND
s r
eadin
gs
Probe #1

9
Figure 4. An example of the failed “flat-frozen” signals
2.4. Summary of correlation coefficients and mutual information indices
behavior
2.4.1. Self-powered neutron detectors
Correct signal
The dependence of the signal noise on the neutron flux fluctuations is obviously
quite straightforward and supposedly linear. All signals of correct sensors
fluctuate according to the fluctuating neutron flux. Their exclusion/inclusion
does not influence substantially the layer average and has only little impact on
correlation or mutual information coefficients. This mechanism can explain the
relatively high level of correlation coefficients while the mutual information
indices remain in the region of values of 0.3 to 0.4.
Bad signal with small fluctuations
Both correlation coefficients and mutual information indices are in the region of
low values. Because the signal’s low fluctuations do not influence the layer
average, the exclusion of the failed sensor from the average calculations is not
reflected in the correlation coefficients and mutual information indices.
Bad signal with big fluctuations
The vibrations of a failed sensor, having for example a cold junction between
the emitter and the leading wire, may affect its signal more severely. The
mechanical vibrations of the reactor core structures and sensors, including the
failed sensor itself, are in correlation with neutron flux fluctuations and
concurrently in certain and supposedly nonlinear link with the failed sensor
signal. Correlation coefficients and mutual information index are high in case
the failed sensor is included in the layer average calculations. After its exclusion
from layer average the correlation coefficients go down, while the mutual
information index remains high due to the supposed nonlinear link to the
neutron flux fluctuations.
Signal failure cause out of the reactor core
The behavior of the correlation coefficients and mutual information indices can,
at least in certain situations similar to the one encountered during the testing,
differentiate in-the-core from out-of-the-core source of failure when the failed
signal is caused by the electronic measuring circuits.
10
The strong fluctuations of the signal of the step-like shape influenced the layer
mean. It resulted in high Cij values. Excluding the signal from the layer mean
reflects in drop of Cij values, while the values of Uij indices remain practically
intact and in the range of the standard values.
2.4.2. Reactor core outlet thermocouples
Correct signal
The dependence of the signal noise on the coolant temperature fluctuations is
obviously quite straightforward and supposedly linear. All signals of correct
sensors fluctuate according to the fluctuating coolant temperatures. The
correlation coefficients are relatively high and the mutual information indices
remain in the average region of values of 0.15 to 0.35. The exclusion or
inclusion of the sensor from the layer average calculation does not influence
substantially the layer average and has only little impact on correlation or
mutual information coefficients.
Suspect signal having a raised level of noise
For suspect TC signals the correlation coefficients are set to the lower values
while the mutual information indices are increased above the average values.
Due to the high number of TCs in the reactor the exclusion or inclusion of the
suspect sensor from the layer average calculation does not influence
substantially the layer average and has only little impact on correlation or
mutual information coefficients.
Bad signal (noisy)
For noisy TC signals the correlation coefficients are set to the lower values
while the mutual information indices are increased high above the average
values. The exclusion or inclusion of the failed sensor from the layer average
calculation does not influence substantially the layer average and has only little
impact on correlation or mutual information coefficients.
Bad signal (very large fluctuations)
For TC signals degraded by the big fluctuations both correlation coefficients and
mutual information indices are high. While the correlation coefficient decreases
to low values after exclusion of the sensor from the layer average calculations,
the mutual information index remains high.

11
2.5. Signal features for failure detection
The consequent of various ways of behavior of correlation coefficients and
mutual information indices in different situations is that we cannot always rely
only on inspection of pure Cij and Uij coefficients. It may be recommended to
support the judgments by other methods making use of e.g. signal pattern
recognition techniques. The signal features, i.e. the signal patterns, can be
constructed e.g. based on the classical FFT power spectral density shape. The
other promising way of constructing the signal features can be based on signal's
wavelet transform coefficients [11]. They, we expect, will reflect the correct and
failed signal.
Figure 5. Haar wavelet coefficients based signal features
For illustration, let’s first calculate the differences between adjacent
elements of signal vector and then decompose this time series up to the level
five of details by Haar wavelets. The selected signal features might be the
maximum and minimum detail wavelet coefficients in each of five scales, see
Fig. 5. The solid lines connecting these features have no real meaning, they are
only to enhance the clarity. We can see that the failed and good signals’ features
form two distinct classes. The good ones are located in a very narrow strip while
1 2 3 4 5 6 7 8 9 10
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
minimum wavelet coefficients maximum wavelet coefficients
wavele
t coeff
icie
nt's v
alu
es
Signal features
+ for failed signals
O for correct signals

12
the failed ones are widely scattered. These patterns can easily be recognized
by properly trained artificial neural networks [12] or other classification
algorithms.
3. Diagnostics Based on Neuro-Fuzzy System Trained to Residuals
Direct validation of the SPND readings in [μA] encounters with a problem of
their dependence on ever changing fuel load patterns as well as the burn-up of
both fuel and SPNDs’ emitters. The training would normally have to be done on
simulated data prior to each fuel cycle. As mentioned above, the idea arose to
train PEANO to residuals instead, i.e. the differences between the core simulator
physics code results and their experimental counterpart values. It was supposed
that the system would be enough to train once.
The problem arises with the SPND readings, which are not directly
calculated by a core simulator. Instead, we define the residuals as follows:
residual = lin.powerSPND – lin.powerCORSIM (7)
Linear powerSPND of the fuel assembly at the location of the SPND is
proportional to the electric current measured from the detector and can be
calculated by the formula considering also the burn-up of both fuel and detector
emitter, temperature, power, vicinity of the fuel assembly, i.e. the fuel load
pattern, boron acid concentration, and uneven power distribution along the fuel
rods inside the fuel assembly. Linear powerCORSIM is calculated from 3D power
reconstruction by the reactor core physics code.
After the residual is validated by PEANO, the validated sensor signal will be
obtained as follows:
validated lin.powerSPND = validated residual + lin.powerCORSIM (8)
For the reactor core outlet temperature thermocouples the residuals are as
follows:
residual = fuel assembly powerTCs – fuel assembly powerCORSIM (9)
Fuel assembly powerTCs is calculated from the enthalpy difference related
to the fuel assemblies’ outlet and inlet temperatures while the fuel assembly
powerCORSIM is calculated from 2D power reconstruction by the reactor core
physics code.
It is expected that the residuals implicitly incorporate the reactor core
physics parameters such as the fuel load pattern and both fuel and SPND
emitters burn-up. If the linear powerSPND was measured/obtained exactly and at

13
the same time the linear powerCORSIM was also calculated exactly, then the
residual would equal zero. Apparently, this is hard to achieve and the individual
residuals differ more or less from zero as a consequent of inaccuracies of both
calculations and measurements. Nevertheless, as the fuel load pattern and burn-
up are implicitly incorporated in both types of linear power quantities
simultaneously, we may expect more systematic than random behavior of the
particular residuals. Besides, these residuals are supposed to depend on control
rod positions, power, and some other parameters. Analogically, we can expect
the same also for TC residuals.
3.1. Experiences from testing in successive fuel cycle-the batch training
PEANO was trained with data from one fuel cycle covering various operating
situations and then tested with data from the successive fuel cycle [13,14]. When
selecting the patterns of the previous fuel cycle into the training data files, we
focused our effort on including various operating situations, which can simply
be characterized by the reactor power. We gathered the data almost from the
whole campaign and tried to cover all situations occurred. We selected the great
number of patterns at the different reactor power levels. Although the reactor
power level during testing remained within the values involved in training, the
validation performance was not satisfactory. Due to the inaccuracies in both
calculations and measurements, the residuals have some systematic values
during the given fuel cycle. In contrast to the situation when training and testing
was performed with data from the same fuel cycle and validation performance
was excellent, this time the signal of some sensors were not modeled properly.
In the most cases, the biggest discrepancies between the measured and PEANO
predicted residuals of lin. power appeared when for these specific sensors the
values of residuals in the new campaign differed substantially from those in the
previous one, which PEANO was trained to. When we move to the next fuel
cycle, the reactor core has different parameters. The new fuel load pattern, the
fuel and SPNDs burn-up may have certain influence on the accuracy of
calculations resulting in the new pattern of the systematic deviations in the
residuals. For these sensors the residuals differ from those PEANO was trained
to and the validation performance deteriorates. Even though many other sensors
were modeled properly, the overall validation performance was unsatisfactory.
In the case of the reactor core outlet thermocouples the core simulator
calculates the integral power of the fuel assembly, which is more accurate than
the 3D power distribution. Moreover, the experimental values of the fuel
assemblies power derived from the difference of enthalpies related to the fuel

14
assemblies outlet and inlet temperatures are supposed to be more
straightforward and accurate than the calculation of the linear power of the fuel
assembly at the location of the SPND. Contrary to all expectations, the
validation performance for some TC sensors was also unsatisfactory.
Whatever the cause of the change of residuals in the other than the training
fuel cycle might be, the conclusion is that training to all possible operating
situation in one fuel cycle prior to its use in the successive ones is not a feasible
solution.
3.2. Incremental training and testing within the same fuel cycle
Despite the unsuccessful validation performance in the successive fuel cycles,
we did not want to abandon the idea of residuals due to their supposed property
to implicitly contain the reactor physics characteristics. Because the validation
performance was excellent within the same fuel cycle, the proposed solution was
to use the incremental training. Precondition for the successful performance was
that training was performed with data from the operation situations prior to the
current one, yet from the same cycle. In the beginning of the fuel cycle after the
reactor start-up the data were first acquired for about two weeks period of time
after which PEANO was trained and then used for signal validation. This
process continued as the fuel cycle proceeded, each time PEANO being
retrained with the new batch of data added to the previous one.
Regarding the SPND sensors, in the most cases the prediction of the
residual values was very good. Yet, there were the situations when the accuracy
deteriorated to five or even ten percent of linear power at the detector location. It
is to note that even we tried to tune the PEANO system by proper adjusting the
clustering and neural networks topology parameters during the training,
deliberately we did not strive for the best possible solution. We wanted to model
the operational staff/user behavior, who is not expected to act like this in the
real life implementation of such a diagnostic system and wants to have a
relatively simply functioning system. This may perhaps be responsible for the
deterioration of the signal predictions, which appeared from time to time.
Summarizing the above mentioned experience with SPND sensors
diagnostics brings up the conclusion that the usage of a system would be to a
certain extent cumbersome when constant attention by the repeated and not quite
easy retraining throughout the fuel cycle is to be given by the user while the
demanded accuracy may not be guaranteed. We therefore are not inclined to
recommend this approach for SPND sensors validation. This standpoint is

15
backed up by the fact that the SPND readings are of less importance to control
the reactor comparing to the TC readings.
3.2.1. Validation of core outlet thermocouples
In addition to the TC residuals the measurements of the reactor power, main
control rods positions, and overall flow rate through the reactor were added to
the model as inputs. For the sake of simplicity only 35 TCs from the 2nd
sector
were given to the input. Validating all 210 TCs at the same time would probably
be impossible as training of such huge neural networks would probably fail. It
means, if we wanted to validate all TCs, we would need to run in parallel 6
instances of the trained Peano system.
The number of middle hidden layer neurons was chosen close to the number
of principal components in data files. The topology of the neural networks was
kept unchanged during the whole process of retraining and testing. The so called
robust training was applied when different noise and faults were superimposed
on the input signals while the networks were trained to output the denoised
signals. This forces the neural networks to act as a noise filter. Similarly to the
SPNDs, the process started at the beginning of the cycle by about two weeks
data gathering which were then used to train the PEANO system. After this
period, within which PEANO could not be used for monitoring the signals, the
real monitoring phase could start. After another two to four weeks the acquired
data were added to the training set and the process was repeated.
A certain problem related to the incremental training can appear when a
new operational situation, not having been included during the previous training,
is encountered. It was the case at the end of the fuel cycle when the reactor
power was lowered to the levels very different from all the previous situations.
Figure 6 shows the typical shape of the prediction – the red line – when all the
monitored signals to be validated were correct. The system did not model the
signal (residual) behavior very correctly in the very end of the campaign; see the
last two sections of the predicted curve between the days 270 to 295. After the
data section between the days 270 to 280 was added to the previous training data
and the system was retrained, the prediction quality again improved, as it is
apparent in the very last section between the days 288 to 295.

16
Figure 6. The typical prediction of the correct TC residual
The other problem, which the incremental training in its substance bears, is
the influencing the prediction results by a drift in the input signals. If the drift is
small and not apparent on the first look, the corrupted signals are used in the
next training phase, which impairs the ability of the trained system to recognize
the deviations in the drifted signals. Five TCs were simulated to drift
simultaneously, each with the rate of 0.1°C/month immediately after the initial
two weeks training data gathering period. As supposed, after some time the
prediction performance degraded. Each time the system was retrained with the
previous section of data containing the drifted signals, the prediction was closer
to the drifted values, which was an unwanted property. For this reason the
testing was stopped soon.
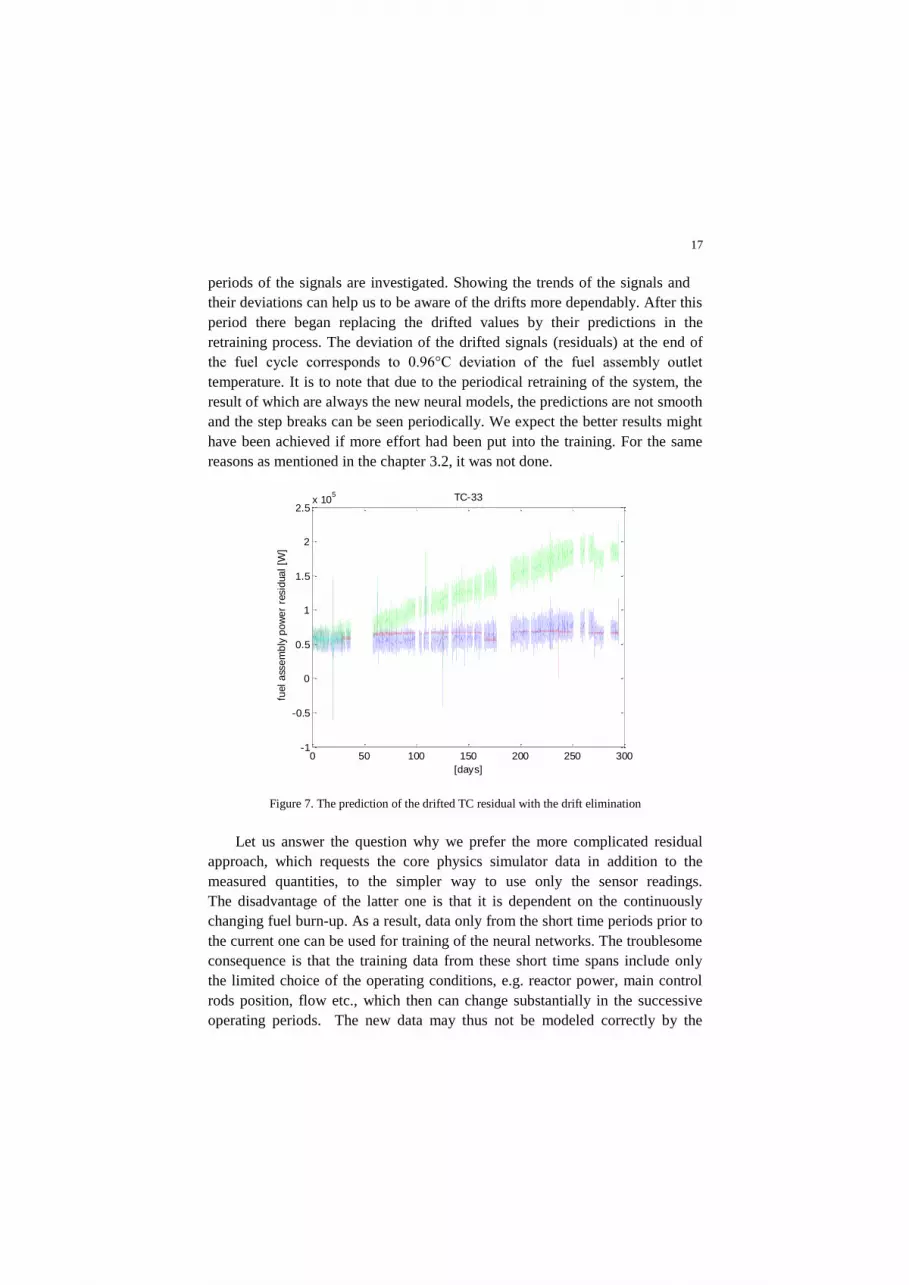
To solve this problem, the retraining style was changed by replacing the
drifted signals by their predicted values. It resulted in much better elimination of
the drift; see Figure 7, which shows the typical performance. The blue line
represents the original not drifted signal (residual) and the green line is the
simulated drift. The prediction is shown by the red line. The initial part of the
prediction line in cyan represents the period of time of approx. one month before
we started to suspect the signals of drifting. This was how we tried to model the
real life use of the system. It roughly corresponds to the sensitivity of the
method, which was about 0.1°C deviation/fault in the measured temperatures.
Below this one cannot be sure whether it is the prediction error if just short
0 50 100 150 200 250 300-5
0
5
10
15
20x 10
4 TC-55
fuel
ass
em
bly
po
we
r re
sid
ua
l [w
]
[days]
17
periods of the signals are investigated. Showing the trends of the signals and
their deviations can help us to be aware of the drifts more dependably. After this
period there began replacing the drifted values by their predictions in the
retraining process. The deviation of the drifted signals (residuals) at the end of
the fuel cycle corresponds to 0.96°C deviation of the fuel assembly outlet
temperature. It is to note that due to the periodical retraining of the system, the
result of which are always the new neural models, the predictions are not smooth
and the step breaks can be seen periodically. We expect the better results might
have been achieved if more effort had been put into the training. For the same
reasons as mentioned in the chapter 3.2, it was not done.
Figure 7. The prediction of the drifted TC residual with the drift elimination
Let us answer the question why we prefer the more complicated residual
approach, which requests the core physics simulator data in addition to the
measured quantities, to the simpler way to use only the sensor readings.
The disadvantage of the latter one is that it is dependent on the continuously
changing fuel burn-up. As a result, data only from the short time periods prior to
the current one can be used for training of the neural networks. The troublesome
consequence is that the training data from these short time spans include only
the limited choice of the operating conditions, e.g. reactor power, main control
rods position, flow etc., which then can change substantially in the successive
operating periods. The new data may thus not be modeled correctly by the
0 50 100 150 200 250 300-1
-0.5
0
0.5
1
1.5
2
2.5x 10
5 TC-33
[days]
fuel
ass
em
bly
po
we
r re
sid
ua
l [W
]

18
neural models created in the previous period of time. On the contrary, the
residual approach comprises the burn-up and other reactor physics
characteristics. The various operating conditions are involved incrementally in
the data coming from the previous time periods. The incremental training is
supposed to enable the use of the trained system for longer periods. The other
reason for using residuals is that the system can be more sensitive and reveal
even very small deviations in the sensor readings in spite of modeling the
signals’ full range. On the other hand, the negative consequence of using
residuals is that more factors are to be used in the procedure of deriving the
power residuals from measured input and output temperatures using functions
for calculating equivalent enthalpies and vice versa back to the validated
temperatures, each contributing to the overall uncertainty of the result.
Tin, Tout, flow →{ (Hout – Hin)*flow - PT } → VTout (10)
Figures 8 to 11 show the MAE and RMSE errors for all 35 TCs in the 2nd
sector
in four different time periods during the fuel cycle. .
Figure 8. MAE and RMSE errors, Nov.2008
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 350
0.05
0.1
0.15
0.2
0.25MAE,RMSE [11/10/08..10:11:44 -.11/18/08..01:51:32]
TCs in 2.sector
`C
MAE
RMSE

19
Figure 9. MAE and RMSE errors, March 2009
Figure 10. MAE and RMSE errors, June 2009
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 350
0.05
0.1
0.15
0.2
0.25MAE,RMSE [02/26/09..01:01:02 -.03/21/09..04:12:03]
TCs in 2.sector
`C
MAE
RMSE
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 350
0.05
0.1
0.15
0.2
0.25MAE,RMSE [05/03/09..20:51:22 -.06/13/09..12:10:15]
TCs in 2.sector
`C
MAE
RMSE

20
Figure 11, MAE, RMSE, July,2009
It is to notice that the mean absolute error for TC#29 in the 2nd
symmetry
sector increased approximately 3 times in July. Figure 12 shows the prediction
of validated outlet temperatures - the red line - during the fuel cycle. It is
apparent that only after the day of approximately 200 a deviation appeared. Why
the predictions before this time were in quite good congruence with the drifted
values can be explained by the very low drift of only 0.025 °C/month, see
Figure 13 showing the trends of all TC#29 symmetry orbits. Closer investigation
shows that in this time the deviation from the rest of TCs in the symmetry orbit
increased slightly, which reflected in the prediction divergence. The other very
important reason is that unnoticed drifted values infiltrated the training data. It
impaired the ability of trained system to recognize the deviating drifted signal.
Each time the system was retrained with the previous section of data containing
the degraded signal, the prediction was close to the drifted values. It is to say
that the estimated sensitivity of the method is about 0.1°C deviation/fault in the
measured temperatures. It was also the limit for our investigation how the
method was capable to cope with the drifts. Below this one cannot be sure
whether it is the prediction error if just short periods of the signals are
investigated. Showing the trends of the signals and their deviations can help us
to be aware of the drifts more dependably, as confirmed by Figures 12 and 13.
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 350
0.05
0.1
0.15
0.2
0.25MAE,RMSE [07/05/09..17:02:04 -.07/30/09..09:23:11]
TCs in 2.sector
`C
MAE
RMSE

21
Figure 12, Prediction for TC 29
Figure 13, All TCs 29 on the symmetry orbit
50 100 150 200 250
302.5
303
303.5
304
304.5
305
305.5
306
306.5
307
TC 29 in symmetry sector #2
[ days ]
T [
' C
]
0.5 1 1.5 2 2.5
x 105
303
304
305
306
307
308
T [
'C
]
symmetrical TCs 29
samples
drift ~ 0.025 `C/month

22
Figure 14, Prediction performance in transient
Figure 15, Prediction performance in transient
200 400 600 800 1000 1200 1400
280
285
290
295
300
305
TC 11; transient 55% nominal power
samples
T [
'C ]
measured values
prediction
200 400 600 800 1000 1200 1400
285
290
295
300
305
samples
T [
'C
]
TC 14; transient 55% nominal power
measured values
prediction
360 370 380 390 400 410 420 430 440 450 460
282.5
283
283.5
284
284.5
285
360 370 380 390 400 410 420 430 440 450 460
280
280.5
281
281.5
282

23
Figures 14 and 15 show the prediction performance during a transient of
55 %. reactor power. Mostly the prediction error was below 0.1 °C, rarely up to
0.4 °C as can be seen in Figure 15. It is well known that the empirical models
like the artificial neural networks perform well in the situations having been
included in the training data. The reactor was mostly operated at the nominal
power level, while there were only few situations of lower power. Therefore, the
close to nominal power data were vastly prevailing in the training files. The very
important issue for a user is to know that the system has not been trained
properly to recognize the current situation and the system’s statements/results of
validation can thus be less dependable. The Peano system incorporates this
feature by evaluating the running degree of reliability.
4. Conclusions
In this work we outline two approaches to in-core sensor validation and present
our first experience. The first one is based on correlation of signals, both in
linear and nonlinear regions, and makes use of the signal fluctuations, which
have their source in perturbations present in the reactor core. It is assumed that
the decreasing similarity of signals is the manifestation of a sensor failure. The
results show the applicability of linear correlation coefficients and mutual
information based criteria to the SPNDs and TCs signal failures detection.
Though this method cannot calculate the expected values of the signals and can
serve “only” for diagnostic purposes, yet it might have an asset to I&C people. It
is also to mention that this method is easy to implement. Authors of ref. [6] even
describe their experience with the ability of the correlation approach to reveal
future sensor failing.
On the other hand, the consequence of specific behavior of both correlation
coefficients and mutual information indices in different situations is that we
should not rely only on their examination. We may want to support our
judgments by other methods making use of e.g. signal pattern recognition
techniques and/or fuzzy logic based inferential algorithms. For example, the
signal features can be constructed based on the wavelet transform coefficients
and/or on the Fast Fourier Transform (FFT) power spectral density shape. They,
we expect, will reflect the correct and failed signal. These patterns could then
easily be recognized by the properly trained artificial neural networks or other
pattern recognition algorithms. The labeling of the failed sensor by statistical
hypothesis testing could be in disputable cases supported by fuzzy logic
inferential algorithms based judgments.

24
The second approach, we were examining, is based on the neuro-fuzzy
modeling of residuals instead of the raw measured values. Residuals are the
differences between the core simulator physics code results and their
experimental counterpart values. We found out that the original idea to train the
neuro-fuzzy system to residuals acquired during one fuel cycle and then using
the trained system in the following ones failed. The remedy to this can be the
incremental training, the process of which is as follows: In the beginning of the
fuel cycle after the reactor start-up the data were first acquired for about two
weeks period of time after which the system was trained and then used for signal
validation. This process continued as the fuel cycle proceeded, each time the
system being retrained with the new batch of data added to the previous one.
The price the user would pay for such a system would be its relatively
cumbersome usage when constant attention by the repeated and not quite easy
retraining throughout the fuel cycle is to be given by the user. In addition to this,
the demanded validation accuracy for SPNDs may not be guaranteed, which is
the reason why we are not inclined to recommend this approach for SPND
sensors validation with their lesser significance in reactor control.
In contrast to the SPNDs, the residual approach to validation of core outlet
TC signals is able to recognize the multiple TC signal failures in the very early
stages of their occurrence. The achieved accuracy of the signal prediction was
mostly better than 0.1°C at the full range of 300°C. It is to mention that the
incremental training, by its very nature, cannot function from the very beginning
of the fuel cycle, as the training data has to be acquired first after the reactor
start-up. The good thing is that within this relatively short time period the
reactor undergoes more power maneuvering and operating conditions, which
makes input data enough diverse for successful training. The unwanted
consequence of the need for initial training at the fuel cycle beginning is that the
systematic errors in TC readings, which may appear right after the reactor start-
up and will be contained in the training data, will not be discovered. The user
will have to rely on an independent approach, e.g. based on the symmetry of the
reactor core.
Our investigation has shown that the neuro-fuzzy residual approach is able
to recognize multiple simultaneous failures with a very good accuracy but at a
cost of a cumbersome use due to the need of a periodical retraining and
replacement of the failed readings by predictions. The real implementation of
this technique would require the development of a new more user friendly
system, which would automatically ensure most of the manual interventions.
Nevertheless, it can be concluded that the reliable signal diagnostics and/or
25
validation can be achieved only by a combination of various techniques able
to capture a variety of failures.
Acknowledgments
This paper is the result of implementation of the project: Increase of Power
Safety of the Slovak Republic (ITMS: 26220220077) supported by the Research
& Development Operational Program funded by the ERDF.
References
1. P.F.Fantoni, S. Figedy,B. Papin, A neuro-fuzzy model applied to full range signal validation of PWR nuclear power plant data. Second OECD Specialist Meeting on Operator Aids for Severe Accident Management (SAMOA-2), Lion, (1997)
2. S.Figedy, Real-Time Process Signal Validation based on Neuro-Fuzzy and
possibilistic Approach, ICANN98, Skovde, Sweden,Sept.2-4, (1998)
3. P. Fantoni, M. Hoffmann, R. Shankar, E. Davis, “On-Line Monitoring of
Instrument Channel Performance in Nuclear Power Plant Using PEANO”,
Progress in Nuclear Energy, Vol. 43, No. 1-4, (2003)
4. M. Hoffmann, “On-line Calibration Monitoring with PEANO”,
NPIC&HMIT 2004, Columbus, Ohio, September (2004)
5. S.Figedy, Outline of In-Core Sensor Validation Based on Correlation and
Mutual Information Analysis, NPIC&HMIT2006, Albuquerque, New
Mexico, Nov.12-16,(2006)
6. F.Adorjan and T.Morita, A Correlation-Based Signal Validation Method for
Fixed In-Core Detectors, Nuclear Technology, 118,264 (1997).
7. R.M.Gray, Entropy and Information Theory, Springer-Verlag (1990)
8. C.E.Shannon, A Mathematical Theory of Communication,
http://cm.bell-labs.com/ cm/ms/what/shannonday/paper.html
9. I.J.Taneja, Generalized Information Measures and Their Applications,
http://www.mtm.ufsc.br/~taneja/book/book.html
10. Numerical Recipes in Fortran 77, http://www.nr.com
11. G.Strang and T.Nguyen, Wavelets and Filter Banks, Wellesley-Cambridge
Press (1996)
12. L.H.Tsoukalas and R.H.Uhrig, Fuzzy and Neural Approaches in
Engineering, John Wiley &Sons (1999)
13. S.Figedy, Outline of New Approaches to In-Core Sensor Validation Based
on Modern Signal Processing and Neuro-Fuzzy Techniques, NPIC&HMIT
2009, Knoxville, Tennessee, Apr.5-9,(2009)

26
14. S.Figedy, Experiences with Residual Approach to Validation of In-Core
Sensors by PEANO Neuro-Fuzzy System, NPIC&HMIT 2010, Las Vegas,
Nevada, Nov.7-11,(2010)