contrasting probabilistic and anti-optimization approaches in an applied mechanics problem
TRANSCRIPT
International Journal of Solids and Structures 40 (2003) 4281–4297
www.elsevier.com/locate/ijsolstr
Contrasting probabilistic and anti-optimization approachesin an applied mechanics problem
I. Elishakoff a, M. Zingales b,*
a Department of Mechanical Engineering, Florida Atlantic University, 777 Glades Road, Boca Raton, FL 33431-0991, USAb Department of Structural and Geotechnical Engineering, Ingegneria Strutturale e Geotecnica, Universit�aa di Palermo,
Viale delle Scienze, I-90128 Palermo, Italy
Received 26 March 2003; received in revised form 26 March 2003
Abstract
Probabilistic and non-probabilistic, anti-optimization analyses of uncertainty are contrasted in this study. Specifi-
cally, the comparison of these two competing approaches is conducted for an uniform column, with initial geometric
imperfection, subjected to an impact axial load. The reliability of the column is derived for the cases when the initial
imperfections posses either (a) uniform probability density, (b) truncated exponential density or (c) generic truncated
probability density. The problem is also analyzed in the context of an interval analysis. It is shown that in, the most
important near-unity reliability range these two approaches tend to each other. Since the interval analysis constitutes a
much simpler procedure than the probabilistic approach, it is argued that the former is advantageous over the latter in
some circumstances.
� 2003 Elsevier Science Ltd. All rights reserved.
Keywords: Probabilistic; Reliability
1. Introduction
According to Einstein, ‘‘so far as the laws of mathematics refer to reality they are not certain. And so far
as they are certain they does not refer to reality’’. How much more this statement appears to apply to
engineering, where numerous uncertain factors are encountered, almost in every problem. The pertinent
question arises on how to model this uncertainty. It is nowadays widely accepted that there are three
competing methods of describing uncertainty, namely, probabilistic method, fuzzy sets based approach,
and the method which is referred to as anti-optimization (Elishakoff and Ben-Haim, 1990) or as guaranteed
approach by Kurzhanski (1977) and by Chernousko (1994). Each of these approaches has generatednumerous research papers and monographs. Yet the systematic comparisons between these three approaches
are still missing. Naturally, there may be a strong argument put forward against such a comparison, in the
* Corresponding author. Tel.: +39-0916568458; fax: +39-0916568407.
E-mail address: [email protected] (M. Zingales).
0020-7683/03/$ - see front matter � 2003 Elsevier Science Ltd. All rights reserved.
doi:10.1016/S0020-7683(03)00196-3
4282 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
first place. Indeed, these three approaches provide judgements of different kind: probabilistic approach
furnishes the reliability of the structure, namely the probability that the structure�s stress, strains or dis-
placements will not take values over some safe threshold. Fuzzy-sets-based approach yields via the concept
of a membership function, the safety margin. Anti-optimization (or guaranteed approach) provides withleast favorable, maximum displacements which can be contrasted with the threshold values. If the maxi-
mum response does not cross the threshold, we can guarantee that the failure will not occur. This corres-
ponds to the statement that if the least favorable, or an anti-optimized, response will be below the failure
boundary, the successful performance will be secured.
This particular thought, namely that three approaches provide with different types of answers, precluded
the very attempt to compare them for a long time. First numerical comparison have been performed in-
dependently by Elishakoff et al. (1994) and Kim et al. (1993) in different but complementary contexts: the
former study dealt with non-linear static buckling, whereas the latter investigation dealt with linear dynamicresponse. In the paper by Elishakoff et al. (1994) for certain regions of variations of the parameters, the
design values of the buckling loads, obtained via applications of two alternative approaches were found to be
extremely close to each other. In the paper by Kim et al. (1993) the design value corresponding to the mean
plus three times standard deviation, was adopted. Recently, Elishakoff and Li (1999) studied a benchmark
static problem, leading to direct contrast of the probabilistic and non-probabilistic analyses of the uncer-
tainty. This study is devoted to systematic comparison of these two approaches in the dynamic environment.
We will consider impact buckling of uniform columns possessing uncertain initial imperfections.
2. Problem formulation
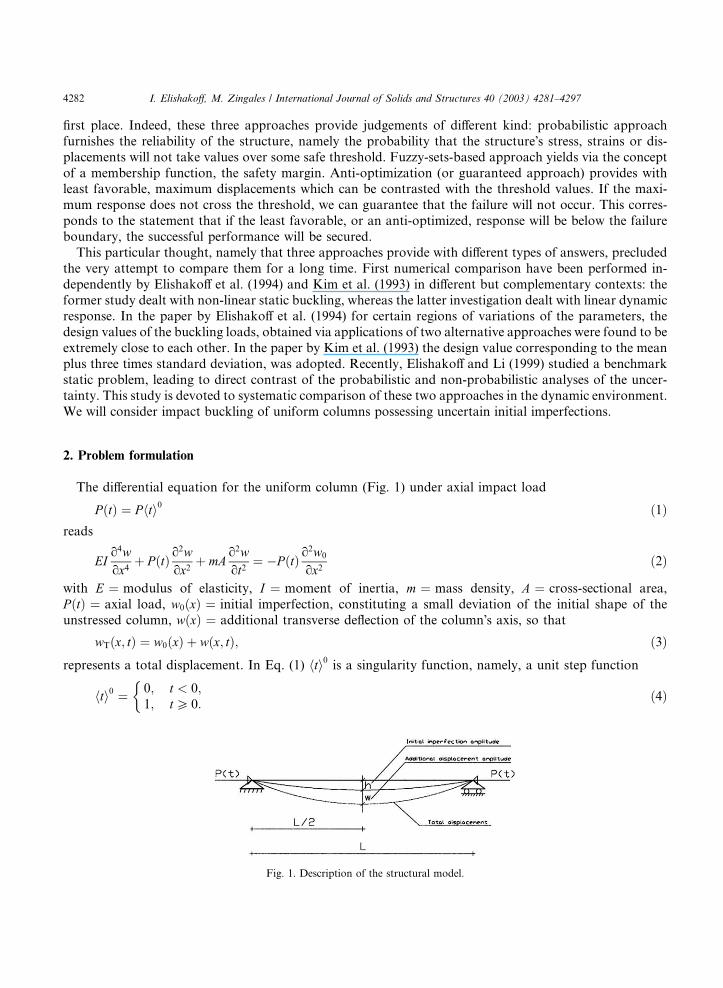
The differential equation for the uniform column (Fig. 1) under axial impact load
P ðtÞ ¼ P hti0 ð1Þ
readsEIo4wox4
þ P ðtÞ o2wox2
þ mAo2wot2
¼ �P ðtÞ o2w0
ox2ð2Þ
with E ¼ modulus of elasticity, I ¼ moment of inertia, m ¼ mass density, A ¼ cross-sectional area,
P ðtÞ ¼ axial load, w0ðxÞ ¼ initial imperfection, constituting a small deviation of the initial shape of the
unstressed column, wðxÞ ¼ additional transverse deflection of the column�s axis, so that
wTðx; tÞ ¼ w0ðxÞ þ wðx; tÞ; ð3Þ
represents a total displacement. In Eq. (1) hti0 is a singularity function, namely, a unit step functionhti0 ¼ 0; t < 0;1; tP 0:
�ð4Þ
Fig. 1. Description of the structural model.

I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4283
In Eq. (2) following notation are adopted: x ¼ axial coordinate, t ¼ time, P ðtÞ ¼ axial load, m ¼ material
density, A ¼ cross-sectional area.
The attendant boundary conditions for the column that is simply supported at its both ends read
wðx; tÞ ¼ 0 at x ¼ 0 and x ¼ L; ð5Þ
o2wox2
¼ 0 at x ¼ 0 and x ¼ L; ð6Þ
where L is column�s length. The initial conditions are
wðx; tÞ ¼ 0;owðx; tÞ
ot¼ 0 at t ¼ 0: ð7Þ
We confine ourselves to the case where the initial imperfection has a multiplicative representation
w0ðxÞ ¼ h sinpxL
� �; ð8Þ
where h is a magnitude of the initial imperfection. Following Elishakoff (1978) we will use the non-
dimensional quantities
n ¼ xL; k ¼ x1t; u ¼ w
D; c ¼ P
Pcl; u0 ¼
w0
D; ð9Þ
where n ¼ non-dimensional axial coordinate, k ¼ non-dimensional time, u0ðnÞ ¼ non-dimensional initial
displacement, uðn; tÞ ¼ non-dimensional additional displacement, a ¼ non-dimensional axial load. In Eq. (9)
x1 ¼pL
� �2 ffiffiffiffiffiffiffiEImA
r; D ¼
ffiffiffiIA
r; Pcl ¼
p2EIL2
; ð10Þ
where x1 ¼ fundamental natural frequency of the ideal column, i.e. of a column with neither initial im-
perfections nor axial load, D ¼ radius of inertia, Pcl ¼ classic, Euler�s buckling load. The differential Eq. (2)reduces to the following non-dimensional one:
o4u
on4þ p2c
o2u
on2þ p4 o
2u
ok2¼ �p2c
d2u0dn2
: ð11Þ
We introduce the non-dimensional initial imperfection
g ¼ h=D: ð12Þ
The additional displacements are expressed in a separable form analogous to Eq. (8), namely:
uðn; kÞ ¼ eðkÞ sinðpnÞ; ð13Þ
where eðkÞ is a time-dependent function. Substituting Eqs. (8) and (13) in conjunction with Eq. (12) into
Eq. (2) yields the following ordinary differential equation with respect to the function eðkÞ
d2eðkÞdk2
þ ð1� cÞeðkÞ ¼ cg: ð14Þ

4284 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
The solution, satisfying the initial conditions (Eq. (7)), is
eðkÞ ¼
cg1� c
ðcoshðrkÞ � 1Þ; c > 1;
1
2gk2; c ¼ 1;
cg1� c
ð1� cosðrkÞÞ; c < 1:
8>>>>><>>>>>:ð15Þ
The non-dimensional total displacement zðn; kÞ equals
zðn; kÞ ¼ wTðx; tÞ=D ¼ vðkÞ sinðpnÞ ð16Þwith vðkÞ being a function of a non-dimensional time k alone
vðkÞ ¼ cg1� c
coshðrkÞ
� 1
c
�; c > 1; ð17aÞ
vðkÞ ¼ gðk2 þ 2Þ=2; c ¼ 1; ð17bÞ
vðkÞ ¼ cg1� c
1
c
� cosðrkÞ
�; c < 1: ð17cÞ
Next sections will deal with various uncertainty analyses.
3. Probabilistic analysis
We treat the uncertain initial imperfection magnitude as a random variable with specified probability
distribution function:
FGðgÞ ¼ ProbðG6 gÞ: ð18Þ
We are interested in finding the survival reliability of the structure, which is defined in general form as theprobability that the structure will perform its specified mission. Herewith we adopt Hoff�s (1965) criterion:
‘‘A structure is in a stable state if admissible finite disturbances of initial state of static or dynamic equi-
librium are followed by displacements whose magnitude remains within allowable bounds during the
required lifetime of the structure.’’
Within this definition, we introduce the admissible state as follows:
�d 6 zðn; kÞ6 c; ð19Þ
where c is the non-dimensional upper bound, and d is the non-dimensional lower bound of the safetyregion. On the other hand, the inequalities
maxn
zðn; kÞ > c or maxn
zðn; kÞ < �d; ð20Þ
mean unsafe regions, or, as defined by Hoff, as regions of impact buckling. Hereinafter we denote random
variables with capital letters, whereas the possible values they take on are designated with lower case
notation. Reliability is defined as a probability that the event described in Eq. (19) takes place
RðkÞ ¼ Prob
� d 6max
nZðn; kÞ6 c
�: ð21Þ

I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4285
k being a pre-chosen non-dimensional time. Since
maxn
Zðn; kÞ ¼ Zð1=2; kÞ ¼ V ðkÞ; ð22Þ
the reliability becomes
RðkÞ ¼ Prob�� d 6 V ðkÞ6 c
: ð23Þ
Note that V ðkÞ is a random function of k, and is represented as a product:
V ðkÞ ¼ GaðkÞ; ð24Þ
where G is a random variable and aðkÞ is a deterministic function,aðkÞ ¼ c1� c
cosðrkÞ
� 1
c
�; c < 1; ð25aÞ
aðkÞ ¼ 1
2ðk2 þ 2Þ; c ¼ 1; ð25bÞ
aðkÞ ¼ c1� c
coshðrkÞ
� 1
c
�; c > 1: ð25cÞ
Reliability, as per in Eq. (23), becomes:
RðkÞ ¼ Prob V ðkÞ�
6 c � Prob V ðkÞ
�6 � d
¼ Prob G
6
c
aðkÞ
!� Prob G
6 � d
aðkÞ
!; ð26Þ
since aðkÞ is a positive-valued function. In terms of probability distribution function FGðgÞ, Eq. (26) is
rewritten as:
RðkÞ ¼ FGc
aðkÞ
!� FG
� d
aðkÞ
!: ð27Þ
Eq. (27) depends, in general, of the specific form of the probability distribution function FGðgÞ. The
influences of the specified probability distribution function over the design of the geometric characteristic
of the column will be the objective of the next sections.
4. Uniformly distributed random initial imperfections
Let us first consider the case when the initial imperfection amplitude G (Fig. 1) possesses an uniformprobability density function over the interval ½a1; a2 and vanishes elsewhere. The probability distribution
function FGðgÞ reads
FGðgÞ ¼1
a2 � a1
hg�
� a1i1 � hg � a2i1�; ð28Þ
where hg � ai1 is a singularity function
hg � ai1 ¼ 0; g < a;g � a; gP a:
�ð29Þ

4286 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
The reliability of the column becomes
RðkÞ ¼ 1
a2 � a1
c
aðkÞ
*0@ � a1
+1
� c
aðkÞ
*� a2
+11A� 1
a2 � a1
*0@ � d
aðkÞ� a1
+1
�*
� d
aðkÞ� a2
+11A:
ð30Þ
Hereinafter, for the sake of simplicity we take a1 P 0; a2 P 0. Since the arguments in third and fourth termsin Eq. (30) are negative, they vanish. We are left with the following expressionRðkÞ ¼ 1
a2 � a1
c
aðkÞ
*0@ � a1
+1
� c
aðkÞ
*� a2
+11A: ð31Þ
We are interested in designing the system, namely, choosing the radius q of a circular cross-section suchthat the reliability RðkÞ will be no less than some codified reliability rc:
RðkÞP rc: ð32Þ
Consider first a sub-case when the applied axial load exceeds the classical buckling load, so thata ¼ PPcl
¼ PL2
p2EI¼ M
q4> 1; M ¼ 4PL2
p3E; ð33Þ
where M is a load-dependent parameter. In virtue of Eq. (25), the reliability reads
RðkÞ ¼ 1
a2 � a1
cð1� q4=MÞcoshðrkÞ � q4=M
*0@ � a1
+11A� 1
a2 � a1
cð1� q4=MÞcoshðrkÞ � q4=M
*0@ � a2
+11A: ð34Þ
Let us closely investigate this expression: if for the pre-selected, non-dimensional time instant k, the ar-
gument of the singularity functions in Eq. (34) satisfies the inequality
cð1� q4=MÞcoshðrkÞ � q4=M
< a1; ð35Þ
then the reliability vanishes identically. On the other hand, if
cð1� q4=MÞcoshðrkÞ � q4=M
> a2; ð36Þ
then the reliability equals unity. In the intermediate range, i.e. for
a1 6cð1� q4=MÞ
coshðrkÞ � q4=M6 a2; ð37Þ
the reliability varies between zero to unity. Generally, in engineering practice, the codified reliability rc isnot taken to be unity. Rather, it is a pre-chosen quantity in an extremely close vicinity of unity. For rctending to unity from below, the inequality in Eq. (37) is valid. Hence the argument in the second term in
Eq. (34) is negative. Therefore, it vanishes, and we are left with:
RðkÞ ¼ 1
a2 � a1
cð1� q4=MÞcoshðrkÞ � q4=M
*� a1
+1
: ð38Þ

I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4287
In order the reliability to tend to unity from below, it is necessary and sufficient that:
limq!qd
cð1� q4=MÞcoshðrkÞ � q4=M
¼ a2; ð39Þ
where qd is the design value of the cross-section�s radius. For it we obtain the following equation:
cð1� q4d=MÞ
cosh kffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiM=q4
d � 1p� �
� q4d=M
¼ a2: ð40Þ
It should be noted that the non-dimensional time parameter k is proportional to the radius, through
Eq. (10), expressed as
k ¼ 1
2
pL
� �2 ffiffiffiffiEm
r( )�ttqd: ð41Þ
Eq. (40) is a transcendental equation in terms of qd, once the time instant �tt at which reliability rc is desired,the failure boundary c, and other parameters are fixed. Design process requires to obtain the cross-sectional
radius qd as a function of these quantities qd ¼ qdð�tt; c;E;m; LÞ either analytically or numerically. It is
advantageous, however, to view Eq. (40) as a function of the failure boundary c as depending upon the
radius qd and the remaining parameters
cðqd;�tt;E;m; LÞ ¼a2 cosh k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiM=q4
d � 1p� �
� q4d=M
n o1� q4
d=M: ð42Þ
This relationship enables the design of the column graphically. One gets a curve c vs qd with otherparameters fixed. Once such curve is drawn, the determination of the required cross-sectional radius qd
becomes a straightforward task: one specifies the failure boundary c and reaches the correspondent radius
in the graph.
Two other sub-cases, associatedwith P ¼ Pcl or P > Pcl, respectively, are dealt with in a perfect analogy. ForP ¼ Pcl the design value of the cross-section�s radius is immediately expressed as the equation qd ¼
ffiffiffiffiffiM4
p. Then
cðqd;�tt;E;m; LÞ ¼a2
2
pL
� �4 Em�tt2
ffiffiffiffiffiM
p�þ 2
�; ð43Þ
whereas for P < Pcl this equation takes the following form:
cðqd;�tt;E;m; LÞ ¼a2 cos k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1�M=q4
d
p� �� q4
d=Mn o
1� q4d=M
: ð44Þ
The results of sample calculations are presented in Figs. 2–4 portraying reliability RðkÞ vs non-dimen-
sional time k for P < Pcl, P ¼ Pcl, P > Pcl, respectively. In the following we will assume the following me-
chanical and geometrical parameters of the column L ¼ 10:0 m, E ¼ 2:1� 106 kg/cm2, m ¼ 2:1� 10�3/9.81
kg s2/cm4. The axial load P is set at P ¼ 3000 kg. As it is seen from Fig. 2, RðkÞ does not assume values of
zero or unity. At time instant zero, the reliability equals 0.8. This value is deducible directly; indeed,
probability density of the initial imperfections for g 2 ½0:1; 0:6 is
fGðgÞ ¼ ð0:6� 0:1Þ�1 ¼ 2: ð45Þ
Hence, the area under the probability density curve between the values c ¼ 0:5 and the uppermost valuethat G may take, namely, 0.6, equals 2ð0:6� 0:5Þ ¼ 0:2, which constitutes the probability of failure Pf at the
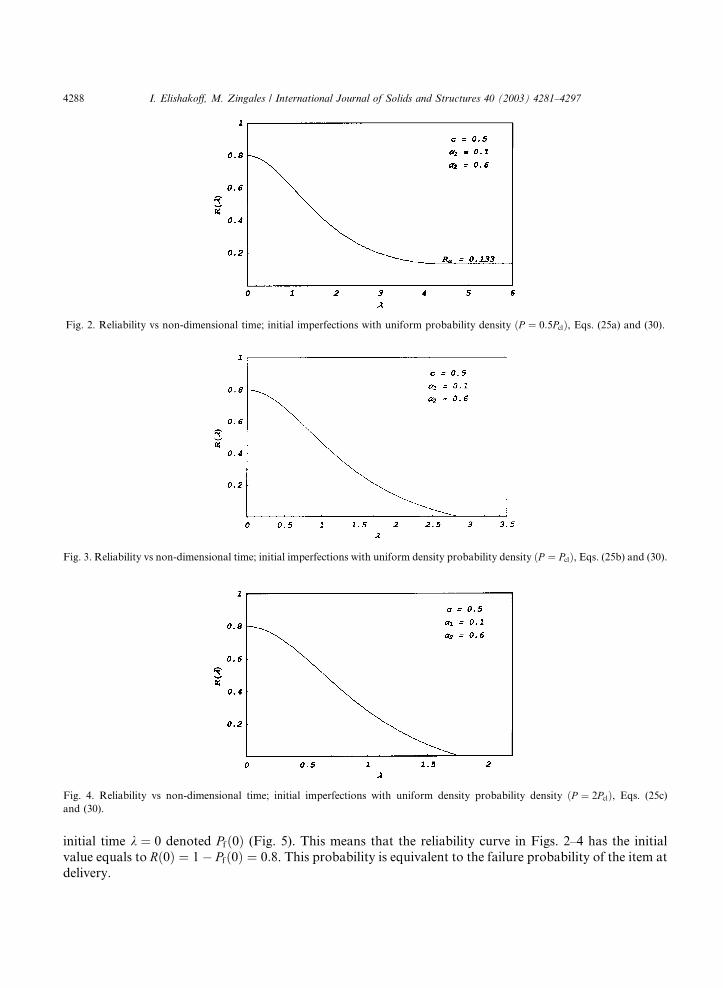
Fig. 3. Reliability vs non-dimensional time; initial imperfections with uniform density probability density ðP ¼ PclÞ, Eqs. (25b) and (30).
Fig. 4. Reliability vs non-dimensional time; initial imperfections with uniform density probability density ðP ¼ 2PclÞ, Eqs. (25c)and (30).
Fig. 2. Reliability vs non-dimensional time; initial imperfections with uniform probability density ðP ¼ 0:5PclÞ, Eqs. (25a) and (30).
4288 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
initial time k ¼ 0 denoted Pfð0Þ (Fig. 5). This means that the reliability curve in Figs. 2–4 has the initial
value equals to Rð0Þ ¼ 1� Pfð0Þ ¼ 0:8. This probability is equivalent to the failure probability of the item at
delivery.
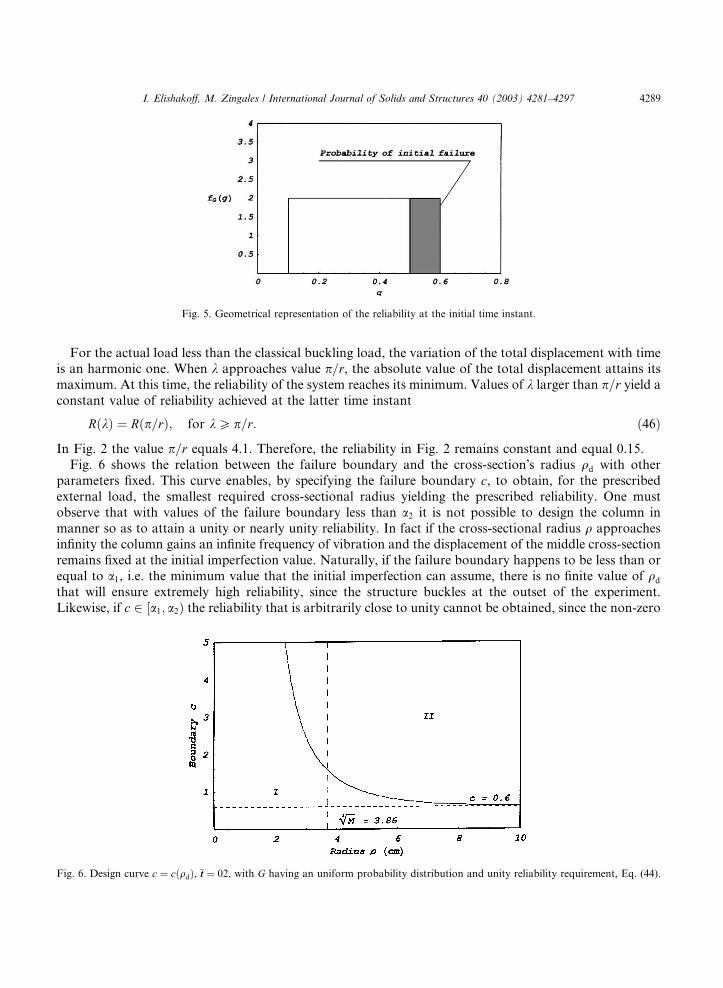
Fig. 5. Geometrical representation of the reliability at the initial time instant.
I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4289
For the actual load less than the classical buckling load, the variation of the total displacement with timeis an harmonic one. When k approaches value p=r, the absolute value of the total displacement attains its
maximum. At this time, the reliability of the system reaches its minimum. Values of k larger than p=r yield a
constant value of reliability achieved at the latter time instant
Fig. 6.
RðkÞ ¼ Rðp=rÞ; for kP p=r: ð46Þ
In Fig. 2 the value p=r equals 4.1. Therefore, the reliability in Fig. 2 remains constant and equal 0.15.
Fig. 6 shows the relation between the failure boundary and the cross-section�s radius qd with other
parameters fixed. This curve enables, by specifying the failure boundary c, to obtain, for the prescribed
external load, the smallest required cross-sectional radius yielding the prescribed reliability. One must
observe that with values of the failure boundary less than a2 it is not possible to design the column in
manner so as to attain a unity or nearly unity reliability. In fact if the cross-sectional radius q approachesinfinity the column gains an infinite frequency of vibration and the displacement of the middle cross-section
remains fixed at the initial imperfection value. Naturally, if the failure boundary happens to be less than or
equal to a1, i.e. the minimum value that the initial imperfection can assume, there is no finite value of qd
that will ensure extremely high reliability, since the structure buckles at the outset of the experiment.
Likewise, if c 2 ½a1; a2Þ the reliability that is arbitrarily close to unity cannot be obtained, since the non-zero
Design curve c ¼ cðqdÞ, �tt ¼ 02, with G having an uniform probability distribution and unity reliability requirement, Eq. (44).
4290 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
probability of failure occurs. On the other hand, when cP a2 the initial probability of collapse is absent,
and the design with nearly unity reliability is feasible.
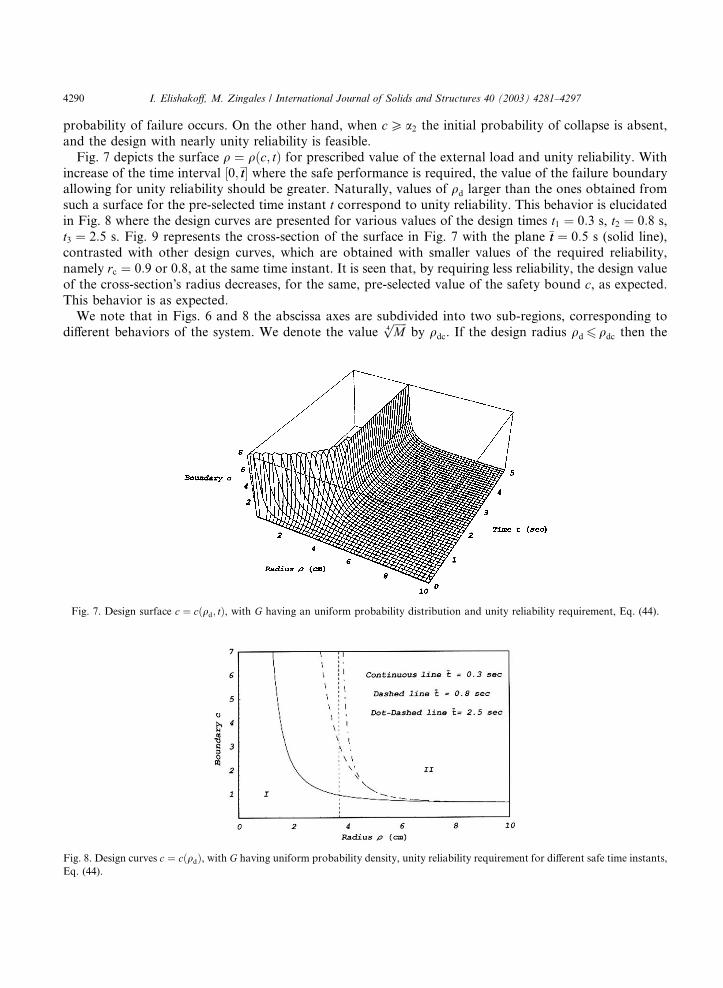
Fig. 7 depicts the surface q ¼ qðc; tÞ for prescribed value of the external load and unity reliability. With
increase of the time interval ½0;�tt where the safe performance is required, the value of the failure boundaryallowing for unity reliability should be greater. Naturally, values of qd larger than the ones obtained from
such a surface for the pre-selected time instant t correspond to unity reliability. This behavior is elucidated
in Fig. 8 where the design curves are presented for various values of the design times t1 ¼ 0:3 s, t2 ¼ 0:8 s,
t3 ¼ 2:5 s. Fig. 9 represents the cross-section of the surface in Fig. 7 with the plane �tt ¼ 0:5 s (solid line),
contrasted with other design curves, which are obtained with smaller values of the required reliability,
namely rc ¼ 0:9 or 0.8, at the same time instant. It is seen that, by requiring less reliability, the design value
of the cross-section�s radius decreases, for the same, pre-selected value of the safety bound c, as expected.This behavior is as expected.
We note that in Figs. 6 and 8 the abscissa axes are subdivided into two sub-regions, corresponding to
different behaviors of the system. We denote the valueffiffiffiffiffiM4
pby qdc. If the design radius qd 6 qdc then the
Fig. 7. Design surface c ¼ cðqd; tÞ, with G having an uniform probability distribution and unity reliability requirement, Eq. (44).
Fig. 8. Design curves c ¼ cðqdÞ, with G having uniform probability density, unity reliability requirement for different safe time instants,
Eq. (44).
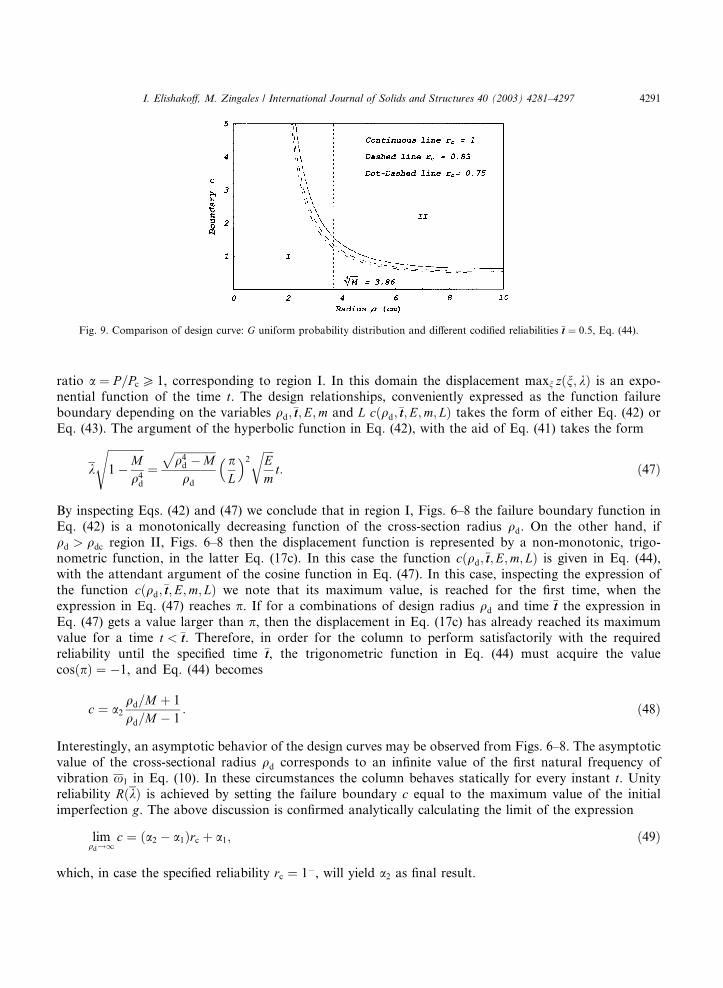
Fig. 9. Comparison of design curve: G uniform probability distribution and different codified reliabilities �tt ¼ 0:5, Eq. (44).
I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4291
ratio a ¼ P=Pc P 1, corresponding to region I. In this domain the displacement maxn zðn; kÞ is an expo-nential function of the time t. The design relationships, conveniently expressed as the function failure
boundary depending on the variables qd;�tt;E;m and L cðqd;�tt;E;m; LÞ takes the form of either Eq. (42) or
Eq. (43). The argument of the hyperbolic function in Eq. (42), with the aid of Eq. (41) takes the form
k
ffiffiffiffiffiffiffiffiffiffiffiffiffi1�M
q4d
s¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiq4d �M
pqd
pL
� �2 ffiffiffiffiEm
rt: ð47Þ
By inspecting Eqs. (42) and (47) we conclude that in region I, Figs. 6–8 the failure boundary function in
Eq. (42) is a monotonically decreasing function of the cross-section radius qd. On the other hand, if
qd > qdc region II, Figs. 6–8 then the displacement function is represented by a non-monotonic, trigo-nometric function, in the latter Eq. (17c). In this case the function cðqd;�tt;E;m; LÞ is given in Eq. (44),
with the attendant argument of the cosine function in Eq. (47). In this case, inspecting the expression of
the function cðqd;�tt;E;m; LÞ we note that its maximum value, is reached for the first time, when the
expression in Eq. (47) reaches p. If for a combinations of design radius qd and time �tt the expression in
Eq. (47) gets a value larger than p, then the displacement in Eq. (17c) has already reached its maximum
value for a time t < �tt. Therefore, in order for the column to perform satisfactorily with the required
reliability until the specified time �tt, the trigonometric function in Eq. (44) must acquire the value
cosðpÞ ¼ �1, and Eq. (44) becomes
c ¼ a2
qd=M þ 1
qd=M � 1: ð48Þ
Interestingly, an asymptotic behavior of the design curves may be observed from Figs. 6–8. The asymptotic
value of the cross-sectional radius qd corresponds to an infinite value of the first natural frequency of
vibration x1 in Eq. (10). In these circumstances the column behaves statically for every instant t. Unityreliability RðkÞ is achieved by setting the failure boundary c equal to the maximum value of the initial
imperfection g. The above discussion is confirmed analytically calculating the limit of the expression
limqd!1
c ¼ ða2 � a1Þrc þ a1; ð49Þ
which, in case the specified reliability rc ¼ 1�, will yield a2 as final result.
4292 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
5. Random initial imperfections with truncated exponential distribution
Assume that although initial imperfection amplitude varies in the interval ½a1; a2, the probability density
function differs from the uniform one. Namely, the initial imperfection G is supposed to have a truncatedexponential probability density function
Fig. 1
and (5
fGðgÞ ¼ A expð�qgÞ hg�
� a1i0 � hg � a2i0�; ð50Þ
where
A ¼ expð½ � qa1Þ � expð � qa2Þ�1 ð51Þ
is a normalization coefficient. The parameter q is a deterministic positive number characterizing the dis-tribution. For a1 ¼ 0 and a2 tending to infinity, q is a reciprocal to the mathematical expectation of the
random variable G. The probability distribution function, obtained by integrating Eq. (50), reads
FGðgÞ ¼ A expðf � qa1Þ � expð � qgÞghg � a1i0 � A expðf � qa2Þ � expð � qgÞghg � a2i0: ð52Þ
In new circumstances Eq. (27) involves the probability distribution function in Eq. (52). Hence:RðkÞ ¼ FGc
aðkÞ
�¼ A expðf �qa1Þ � expð�qc=aðkÞÞg c
aðkÞ
�� a1
�0
� A expðf �qa2Þ � expð � qc=aðkÞÞg caðkÞ
�� a2
�0
: ð53Þ
Note that aðkÞ is given in Eq. (25); it depends upon the ratio of the external load and the classical buckling
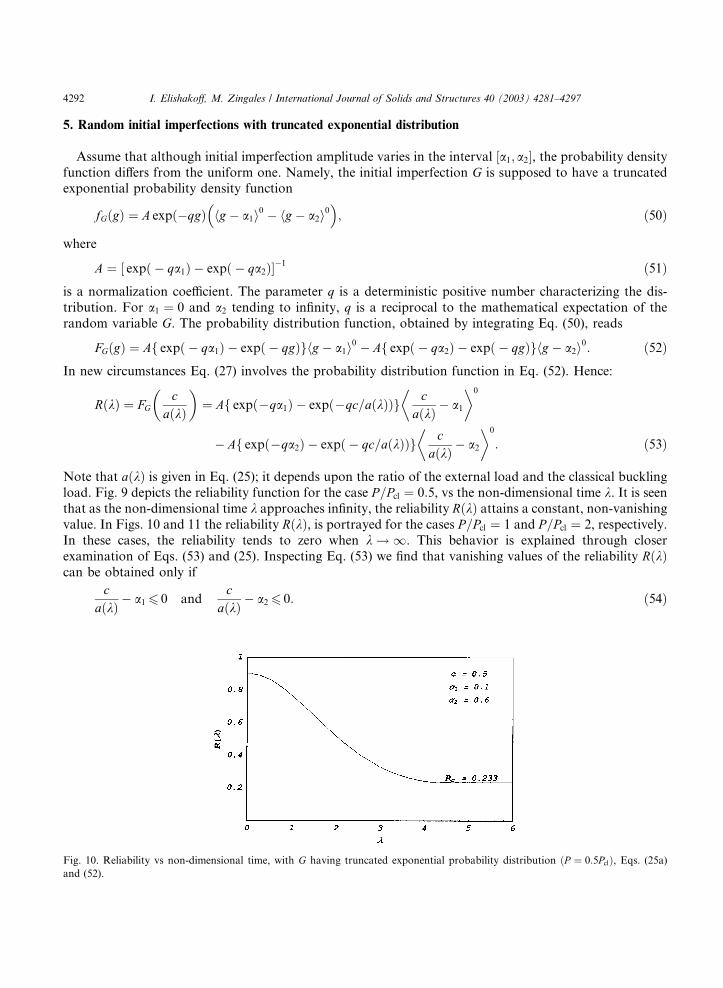
load. Fig. 9 depicts the reliability function for the case P=Pcl ¼ 0:5, vs the non-dimensional time k. It is seenthat as the non-dimensional time k approaches infinity, the reliability RðkÞ attains a constant, non-vanishingvalue. In Figs. 10 and 11 the reliability RðkÞ, is portrayed for the cases P=Pcl ¼ 1 and P=Pcl ¼ 2, respectively.
In these cases, the reliability tends to zero when k ! 1. This behavior is explained through closer
examination of Eqs. (53) and (25). Inspecting Eq. (53) we find that vanishing values of the reliability RðkÞcan be obtained only if
caðkÞ � a1 6 0 and
caðkÞ � a2 6 0: ð54Þ
0. Reliability vs non-dimensional time, with G having truncated exponential probability distribution ðP ¼ 0:5PclÞ, Eqs. (25a)2).
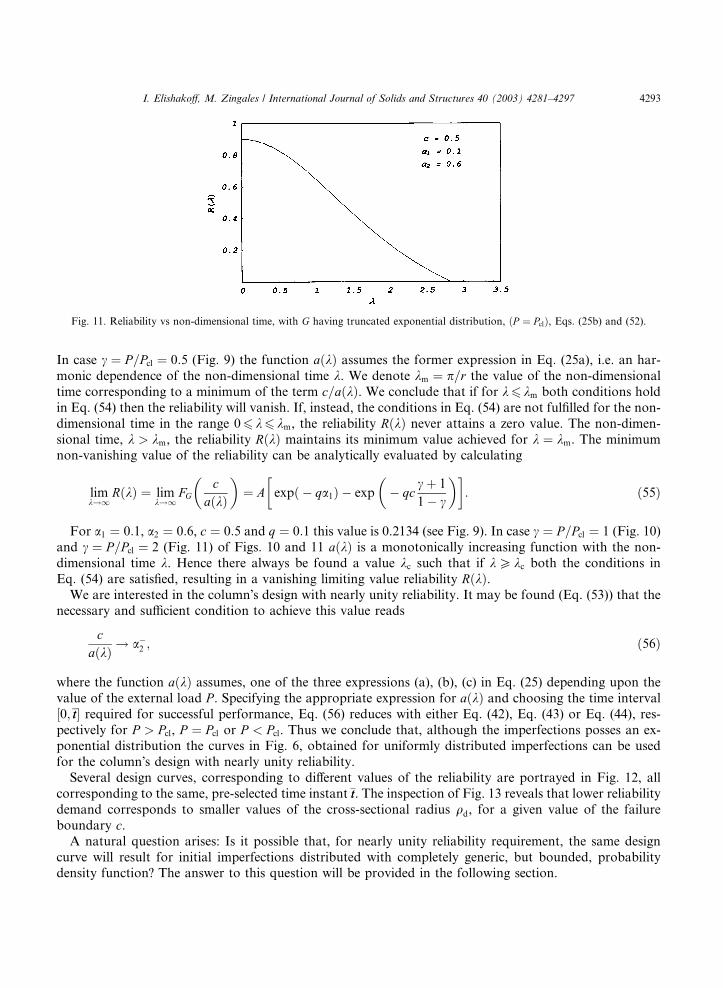
Fig. 11. Reliability vs non-dimensional time, with G having truncated exponential distribution, ðP ¼ PclÞ, Eqs. (25b) and (52).
I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4293
In case c ¼ P=Pcl ¼ 0:5 (Fig. 9) the function aðkÞ assumes the former expression in Eq. (25a), i.e. an har-
monic dependence of the non-dimensional time k. We denote km ¼ p=r the value of the non-dimensional
time corresponding to a minimum of the term c=aðkÞ. We conclude that if for k6 km both conditions hold
in Eq. (54) then the reliability will vanish. If, instead, the conditions in Eq. (54) are not fulfilled for the non-
dimensional time in the range 06 k6 km, the reliability RðkÞ never attains a zero value. The non-dimen-
sional time, k > km, the reliability RðkÞ maintains its minimum value achieved for k ¼ km. The minimumnon-vanishing value of the reliability can be analytically evaluated by calculating
limk!1
RðkÞ ¼ limk!1
FGc
aðkÞ
�¼ A expð
�� qa1Þ � exp
� qc
c þ 1
1� c
� : ð55Þ
For a1 ¼ 0:1, a2 ¼ 0:6, c ¼ 0:5 and q ¼ 0:1 this value is 0.2134 (see Fig. 9). In case c ¼ P=Pcl ¼ 1 (Fig. 10)
and c ¼ P=Pcl ¼ 2 (Fig. 11) of Figs. 10 and 11 aðkÞ is a monotonically increasing function with the non-
dimensional time k. Hence there always be found a value kc such that if k P kc both the conditions in
Eq. (54) are satisfied, resulting in a vanishing limiting value reliability RðkÞ.We are interested in the column�s design with nearly unity reliability. It may be found (Eq. (53)) that the
necessary and sufficient condition to achieve this value reads
caðkÞ ! a�
2 ; ð56Þ
where the function aðkÞ assumes, one of the three expressions (a), (b), (c) in Eq. (25) depending upon the
value of the external load P . Specifying the appropriate expression for aðkÞ and choosing the time interval
½0;�tt required for successful performance, Eq. (56) reduces with either Eq. (42), Eq. (43) or Eq. (44), res-
pectively for P > Pcl, P ¼ Pcl or P < Pcl. Thus we conclude that, although the imperfections posses an ex-ponential distribution the curves in Fig. 6, obtained for uniformly distributed imperfections can be used
for the column�s design with nearly unity reliability.
Several design curves, corresponding to different values of the reliability are portrayed in Fig. 12, all
corresponding to the same, pre-selected time instant�tt. The inspection of Fig. 13 reveals that lower reliability
demand corresponds to smaller values of the cross-sectional radius qd, for a given value of the failure
boundary c.A natural question arises: Is it possible that, for nearly unity reliability requirement, the same design
curve will result for initial imperfections distributed with completely generic, but bounded, probabilitydensity function? The answer to this question will be provided in the following section.
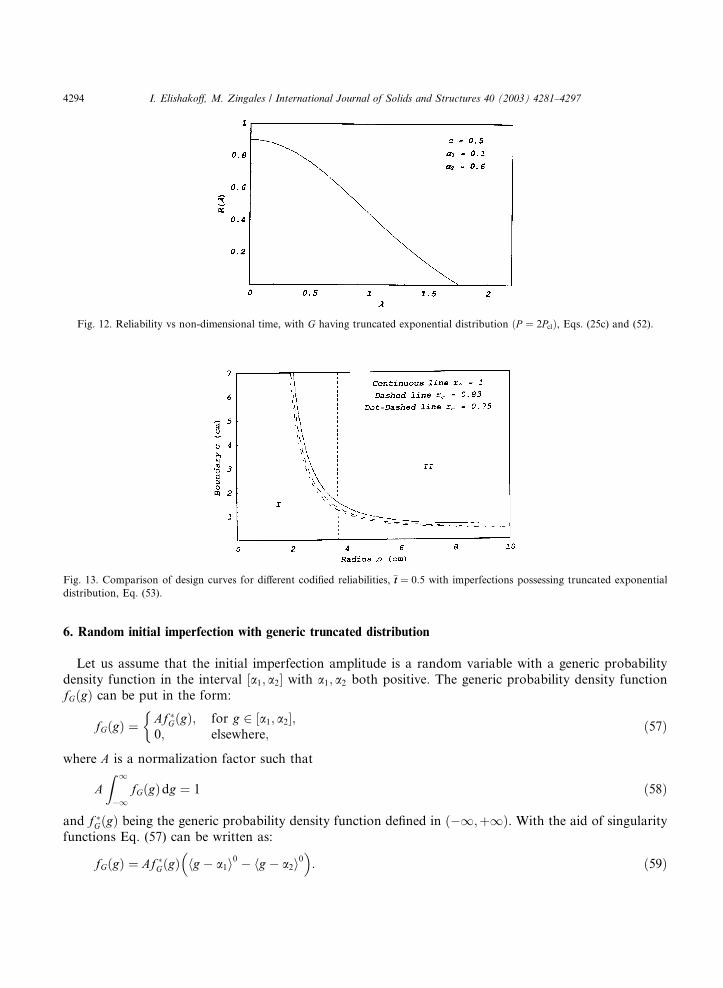
Fig. 13. Comparison of design curves for different codified reliabilities, �tt ¼ 0:5 with imperfections possessing truncated exponential
distribution, Eq. (53).
Fig. 12. Reliability vs non-dimensional time, with G having truncated exponential distribution ðP ¼ 2PclÞ, Eqs. (25c) and (52).
4294 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
6. Random initial imperfection with generic truncated distribution
Let us assume that the initial imperfection amplitude is a random variable with a generic probability
density function in the interval ½a1; a2 with a1; a2 both positive. The generic probability density function
fGðgÞ can be put in the form:
fGðgÞ ¼Af �
GðgÞ; for g 2 ½a1; a2;0; elsewhere;
�ð57Þ
where A is a normalization factor such that
AZ 1
�1fGðgÞdg ¼ 1 ð58Þ
and f �GðgÞ being the generic probability density function defined in ð�1;þ1Þ. With the aid of singularity
functions Eq. (57) can be written as:
fGðgÞ ¼ Af �GðgÞ hg
�� a1i0 � hg � a2i0
�: ð59Þ

I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4295
The probability distribution function FGðgÞ is obtained through formal integration of Eq. (59) reading
FGðgÞ ¼Z g
�1fGðyÞdy ¼
Z g
a1
Af �GðyÞdy: ð60Þ
�
The reliability RðkÞ of the column is given through Eq. (27) with FG c=aðkÞ represented by Eq. (61).In order to design with an extremely high reliability requirement it is sufficient that the argument
c=aðkÞ ! a�2 , resulting in
limc
aðkÞ!a�
2
FGc
aðkÞ
!¼ lim
caðkÞ
!a�2
Z c=aðkÞ
�1Af �
GðgÞ hgh
� a1i0 � hg � a2i0idg
¼ limc
aðkÞ!a�
2
Z c=aðkÞ
a1
Af �GðgÞ hg
h� a1i0 � hg � a2i0
idg ¼
Z a2
a1
Af �GðgÞdg ¼ 1: ð61Þ
Necessity could be demonstrated as follows: If c=aðkÞ equals some eaa that is less than a2, then the reliability
equals F ðeaaÞ that is smaller than unity. Hence it is necessary the argument c=aðkÞ to approach a2 to get unity
reliability.
To sum up, in this section we established that for the imperfection amplitude that is having either the
uniform distribution or the truncated exponential distribution, the nearly unity reliability design requires
that c=aðkÞ tend to a2. Now, we observe that the analogous conclusion holds without specifying the type of
probability distribution, except that its density is bounded between a1 and a2. Thus, irrespective of thespecified character of the bounded density, the same design value of the cross-section radius qd is achieved.
This independence of the design on the probabilistic contents appears to be remarkable. It leads to the
following question: since the obtained designs are independent from the particular form of the probability
density, may it be that the same result is obtainable without resorting to the probability notion at all? The
reply to this question is affirmative as will be shown below.
7. Buckling under impact load: anti-optimization interval analysis
Let us postulate that the initial imperfections constitute an uncertain variable, although not a random
one. Specifically, we assume that imperfections constitute an interval variable
g ¼ ½a1; a2 ð62Þ
with both a1 and a2 positive values. The interval analysis is a mathematical tool dealing with intervals ratherthan with numbers. Note that a real number can be represented as in interval with coinciding boundsj ¼ ½a; a. For the mathematical details of the interval analysis one could consult with monographs by
Moore (1965), Alefeld and Herzberger (1983), Neumaier (1990) and others. In the present context the
analysis is straightforward since the response function vðkÞ, as seen in Eq. (17), is a linear function of the
initial imperfection amplitude g. We define the functions v1ðkÞ and v2ðkÞ as the lower and the upper en-
velopes of the response, respectively. These constitute the interval response function ½vðkÞ
½vðkÞ ¼ ½v1ðkÞ; v2ðkÞ ¼ ½a1; a2c
1� ccoshðrkÞ
� 1
c
�; c > 1; ð63aÞ
½vðkÞ ¼ ½v1ðkÞ; v2ðkÞ ¼ ½a1; a2ðk2 þ 2Þ
2; c ¼ 1; ð63bÞ

4296 I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297
½vðkÞ ¼ ½v1ðkÞ; v2ðkÞ ¼ ½a1; a2c
c � 1cosðrkÞ
� 1
c
�; c < 1: ð63cÞ
Inspection of Eq. (63) reveals that the interval displacement function of non-dimensional time k is
represented as a product of an interval variable ½a1; a2 by a deterministic function aðkÞ defined in Eq. (25).
In order to design the column, i.e. to guarantee its successful performance until the pre-selected time�tt, or itsnon-dimensional counterpart k, it is necessary and sufficient to bound the largest possible displacement to
satisfy the inequality
v2ðkÞ6 c; ð64Þ
where c is the failure boundary. Bearing in mind Eq. (63) in conjunction with Eq. (25) we get
c6 aðkÞa2: ð65Þ
We note that the design condition in Eq. (65) coincides formally with Eq. (54) when the required reliability
approaches unity from below. This proves the equivalence between the results furnished by interval analysisand probabilistic one when rc attains values extremely close to unity.
8. Conclusions
A one-dimensional impact-buckling problem was studied in this paper in order to contrast the proba-
bilistic and non-probabilistic analyses of uncertainty. Simplicity of the example allows us not to loose sightof the ‘‘forest amongst the trees’’ of analytical and numerical derivations. In particular, this example
illustrates that the probabilistic analysis and the non-probabilistic, interval analyses are compatible with
each other. In probabilistic analysis one postulates the knowledge of the probability density function.
Often, such an information is unavailable. To model this situation we constructed two alternative models of
probability density, tough utilizing a random variable with either uniform or non-uniform truncated
density. Both yielded the same value for the design variable. This result lead to the general conclusion, that
irrespective of the density involved, except of it extending between the lower possible value a1 and the upper
possible one a2, the same designs will follow. This could be interpreted as ‘‘good news’’ for the probabilists.Researchers in the field of stochasticity could argue that the unavailability of the probability density, except
that the information on its boundedness may be immaterial. Thus any assumption on the probability
density will be equally efficient. If, however, the experimental data is available, then the appropriate density
should be utilized. We maintain that a design point at the bound of the distribution provides a ‘‘near unity’’
probability. This seems blatantly transparent. Yet this fact appears not to be emphasized by the proba-
bilistic analysts. Even though the of the probability density function is not needed in the interval analysis,
one must face the issue on how to properly define bounds. Except in special cases where there exist well
defined bounds, the selection of the bounds will likely rely on a decision, perhaps based on data analysis orphysical arguments.
Remarkably, the same designs furnished by the probabilistic analysis were also obtained through the use
of the interval analysis. This suggests the following idea: since the initial imperfection is an uncertain value,
and often no data is available to justify the particular choice of the density, why do not to employ the
simplest possible approach? Interval mathematics is indeed such a method. Although in this particular case
interval analysis may appear simple, it provides with the same result as derived by more sophisticated and
algebraically lengthier probabilistic analysis. It is concluded, therefore, due to engineering pragmatism, that
in some circumstances the non-probabilistic analysis of uncertainty may be preferable to probabilistic one,since it leads to the same results, as the probabilistic analysis, in a much simpler manner.

I. Elishakoff, M. Zingales / International Journal of Solids and Structures 40 (2003) 4281–4297 4297
Acknowledgements
This study has been supported by the N.A.S.A. Langley Research Center (I.E.) and the Italian Ministry
of Science and Technological Research (M.Z.). This financial support is gratefully appreciated.
References
Alefeld, G., Herzberger, J., 1983. Introduction to Interval Computations. Academic Press, New York.
Chernousko, F.E.L., 1994. State Estimation of Dynamic Systems. CRC Press, Boca Raton.
Elishakoff, I., 1978. Axial impact buckling of columns with random initial imperfections. Journal of Applied Mechanics 45, 361–365.
Elishakoff, I., Ben-Haim, Y., 1990. Dynamics of thin cylindrical shell under impact with limited deterministic informations on its initial
imperfections. Structural Safety 8, 103–112.
Elishakoff, I., Li, Q., 1999. How to combine probabilistic and anti-optimization methods? Whys and hows in uncertainty modeling
(probability, fuzziness and anti-optimization). In: Elishakoff, I. (Ed.), CISM Courses and Lectures. Springer-Verlag, Wien, New
York, pp. 319–339.
Elishakoff, I., Cai, G.Q., Starnes Jr., J.H., 1994. Nonlinear buckling of columns with initial imperfection via stochastic and non-
stochastic, convex models. International Journal of Non-Linear Mechanics 29, 71–82.
Hoff, N.J., 1965. In: Herrmann, G. (Ed.), Dynamic Stability of Structures. Pergamon Press, New York, pp. 7–44.
Kim, Yu.V., Ovseyevich, A.I., Reshetnyak, Yu.N., 1993. Comparison of stochastic and guaranteed approaches to the estimation of the
state of dynamic systems. Journal of Computer and System Sciences International 31 (6), 56–64.
Kurzhanski, A.B., 1977. Control and Observation Under Conditions of Uncertainty. Nauka, Moscow (in Russian).
Moore, R., 1965. Methods and Applications of Interval Analysis. SIAM, Philadelphia.
Neumaier, A., 1990. Interval Methods for System of Equations. Cambridge University Press, New York.