quadrotor assignment
TRANSCRIPT
Modeling and simulation of Quad rotor helicopter using H infinity controllerABSTRACT
This report will present an integral predictive/H infinity control structure design in order to provide a solution for the path following quad rotor helicopter. By utilizing Taylor’s series this work will develop a linearized dynamic equation for the system. Therefore the developed model will be simulated by utilizing Mat lab/Simulink software. The simulation results therefore are to enhance the performance of the proposed control design strategy.
2013
OKOYE CHUKWUNAENYE NNANNA .S.UNIVERSITY OF DERBY
5/29/2013
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
ContentsCHAPTER 1............................................................2
INTRODUCTION........................................................2CHAPTER 2............................................................2
STATE OF ART........................................................2CHAPTER 3............................................................4
QUAD ROTOR MODEL AND SYSTEM.........................................43.1 Basic Concepts................................................4
3.2 Newton-Euler model............................................83.3 DC Motor.....................................................11
Voltage and angular velocity of propeller...........................13Voltage and thrust..................................................13
CHAPTER 4...........................................................18CONTROL ALGORITHM..................................................18
4.1 Control modeling.............................................184.2 H infinity controller........................................20
4.3 Quad rotor Simulation........................................234.3 Simulation Results...........................................25
4.4 Discussion...................................................294.5 Conclusion...................................................30
4.6 Reference....................................................304.6 Appendix.....................................................31
1 MSc in Control and Instrumentation
Modeling and simulation of Quad rotor helicopter using H infinity controllerABSTRACT
This report will present an integral predictive/H infinity control structure design in order to provide a solution for the path following quad rotor helicopter. By utilizing Taylor’s series this work will develop a linearized dynamic equation for the system. Therefore the developed model will be simulated by utilizing Mat lab/Simulink software. The simulation results therefore are to enhance the performance of the proposed control design strategy.
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
CHAPTER 1INTRODUCTIONThe design of unmanned aerial vehicles (UAV’S) have much
advantages especially in control area throughout last decades.
Currently this unmanned aerial vehicle has many applications
which include searching and rescuing operations, military
application, and wildlife protection exploration of building
together with security and inspection task. This UAV are very
important especially when all this applications are being
executed in a most dangerous and unapproachable surroundings or
environments. For the past few years the configuration of UAV in
the quad rotor has been noted in so many articles. This vehicle
mostly relies on vertical take-off and landing concepts which is
also known as VTOL which can be also utilized in the development
2 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
of control laws. Moreover in this kind of helicopter it makes use
of the equilibrium forces developed by the four rotors. Therefore
among the advantages of this configured quad rotor is its ability
of load capacity. Mostly this helicopter can be maneuverable i.e.
it can be able to maneuver in different direction which does
enable take-off and landing as well as flight in a rugged
environment. The main aims of this report are the system
modeling, control technique or algorithm, evaluation and
simulation design.
CHAPTER 2STATE OF ARTFor the past few years, the state of the art in vertical take-off
and landing (VTOL) unmanned aerial vehicle has attracted
different contributes. Some project which relies on commercially
available platforms such as Draganflyer, X-UFO and MD4-200. Some
of the researchers instead prefer to develop their own structure.
A few other works directs its attention on modeling derivation
3 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
and efficient configuration. The most important techniques and
the respective publication are now presented:
The first control is done using Lyapunov theory.
The second control is provided by PD2 feedback and PID structure.
On the contrary a PID structure does not require some specific
model parameters and the control law is much simpler to
implement.
The third control uses an adaptive technique.
While fourth control is based on linear quadratic regulator (LQR)
the main advantage of this technique is that the optimal input
signals turn out to be obtained from full state feedback by
solving the Ricatti equation.
The fifth control is done with back stepping control technique.
The sixth control is provided by dynamic feedback.
CHAPTER 34 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
QUAD ROTOR MODEL AND SYSTEMConsidering this chapter, the quad rotor models are derived. The
result is indeed crucial due to the movement of the helicopter
with respect to its inputs. Therefore through the equation it
makes it easy to predict the position acquired by the helicopter
by observing its motor speed.
3.1 Basic ConceptsA quad rotor can be said to be a model which consist of four
rotors in a cross configuration position. Concerning the cross
configuration it physical structure is light and thin, therefore
it displays robustness by connecting the motors mechanically.
While rotating the front and rear propellers rotate counter clock
wise, while both the left and right movies in clock wise
direction. Due to this configuration it does eliminate the
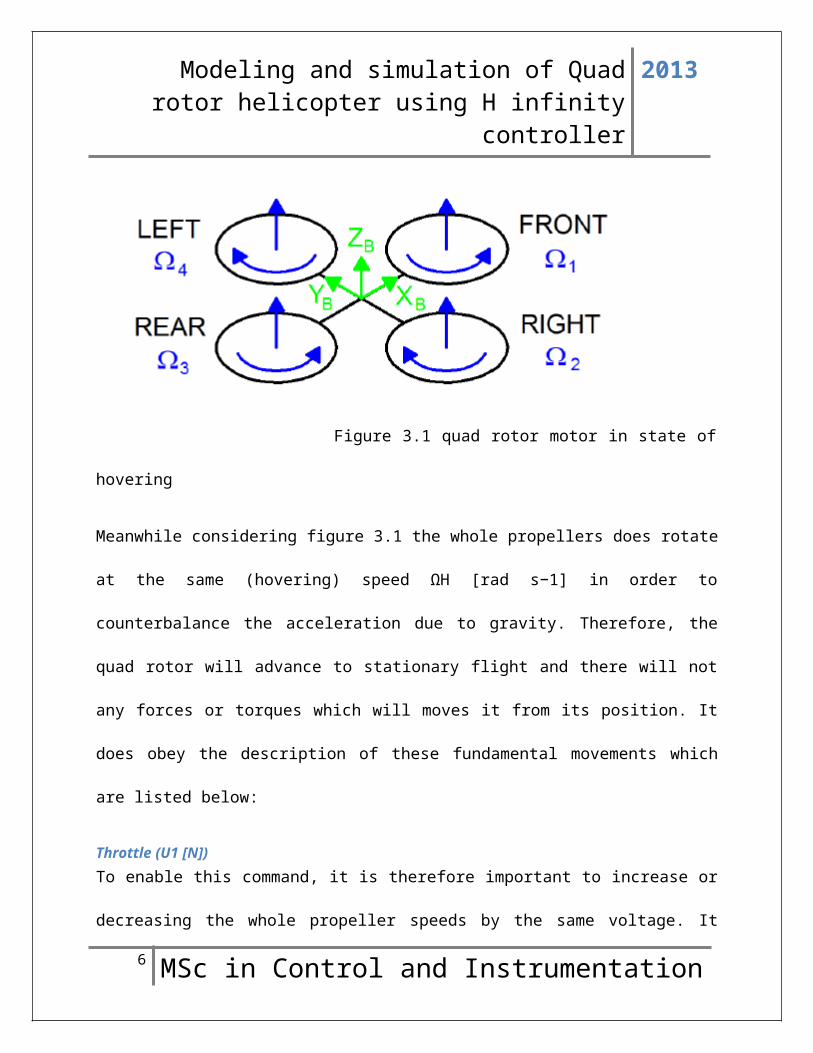
requirement for a tail rotor. The diagram below displays the
physical structure model in the state of hovering, where by all
the propeller has equal speed.
5 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Figure 3.1 quad rotor motor in state of
hovering
Meanwhile considering figure 3.1 the whole propellers does rotate
at the same (hovering) speed ΩH [rad s−1] in order to
counterbalance the acceleration due to gravity. Therefore, the
quad rotor will advance to stationary flight and there will not
any forces or torques which will moves it from its position. It
does obey the description of these fundamental movements which
are listed below:
Throttle (U1 [N])To enable this command, it is therefore important to increase or
decreasing the whole propeller speeds by the same voltage. It
6 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
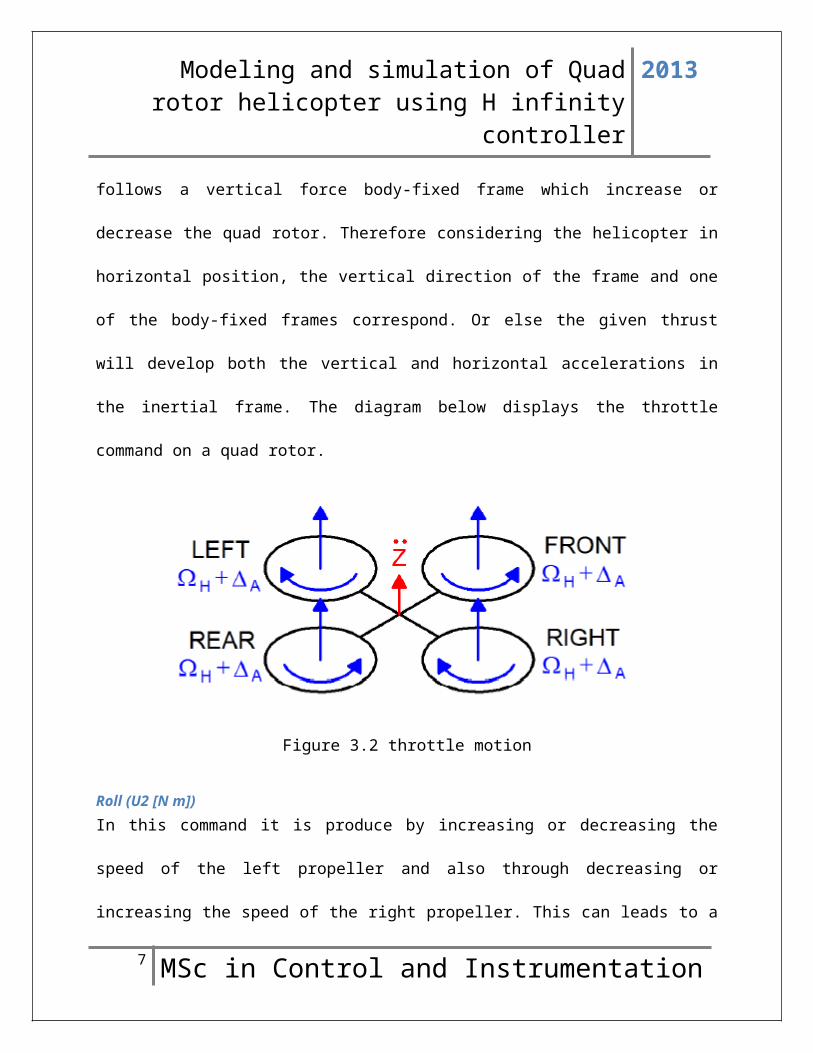
follows a vertical force body-fixed frame which increase or
decrease the quad rotor. Therefore considering the helicopter in
horizontal position, the vertical direction of the frame and one
of the body-fixed frames correspond. Or else the given thrust
will develop both the vertical and horizontal accelerations in
the inertial frame. The diagram below displays the throttle
command on a quad rotor.
Figure 3.2 throttle motion
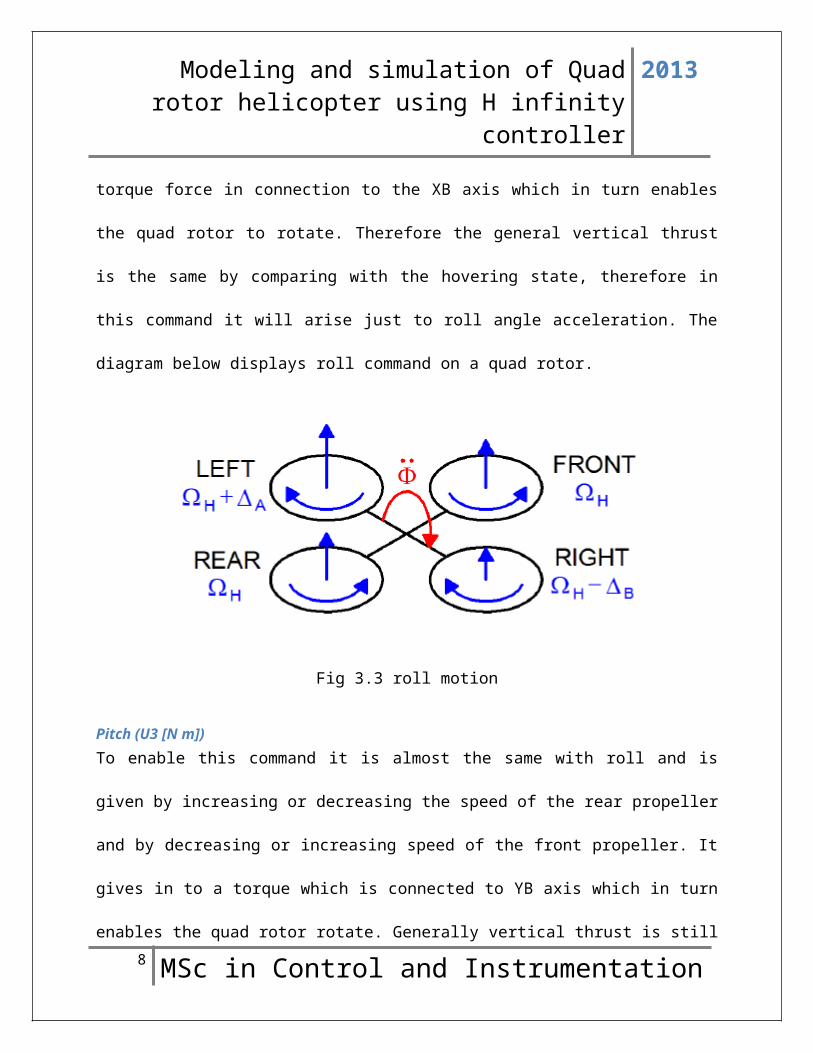
Roll (U2 [N m])In this command it is produce by increasing or decreasing the
speed of the left propeller and also through decreasing or
increasing the speed of the right propeller. This can leads to a
7 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
torque force in connection to the XB axis which in turn enables
the quad rotor to rotate. Therefore the general vertical thrust
is the same by comparing with the hovering state, therefore in
this command it will arise just to roll angle acceleration. The
diagram below displays roll command on a quad rotor.
Fig 3.3 roll motion
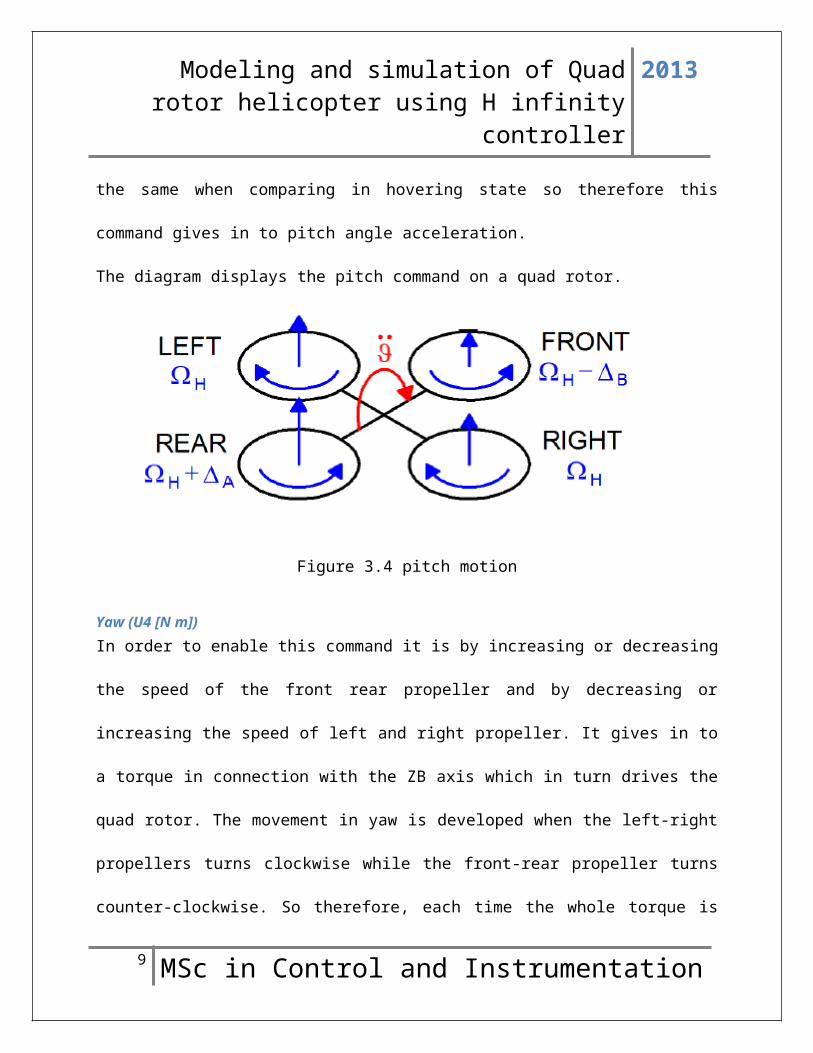
Pitch (U3 [N m])To enable this command it is almost the same with roll and is
given by increasing or decreasing the speed of the rear propeller
and by decreasing or increasing speed of the front propeller. It
gives in to a torque which is connected to YB axis which in turn
enables the quad rotor rotate. Generally vertical thrust is still8 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
the same when comparing in hovering state so therefore this
command gives in to pitch angle acceleration.
The diagram displays the pitch command on a quad rotor.
Figure 3.4 pitch motion
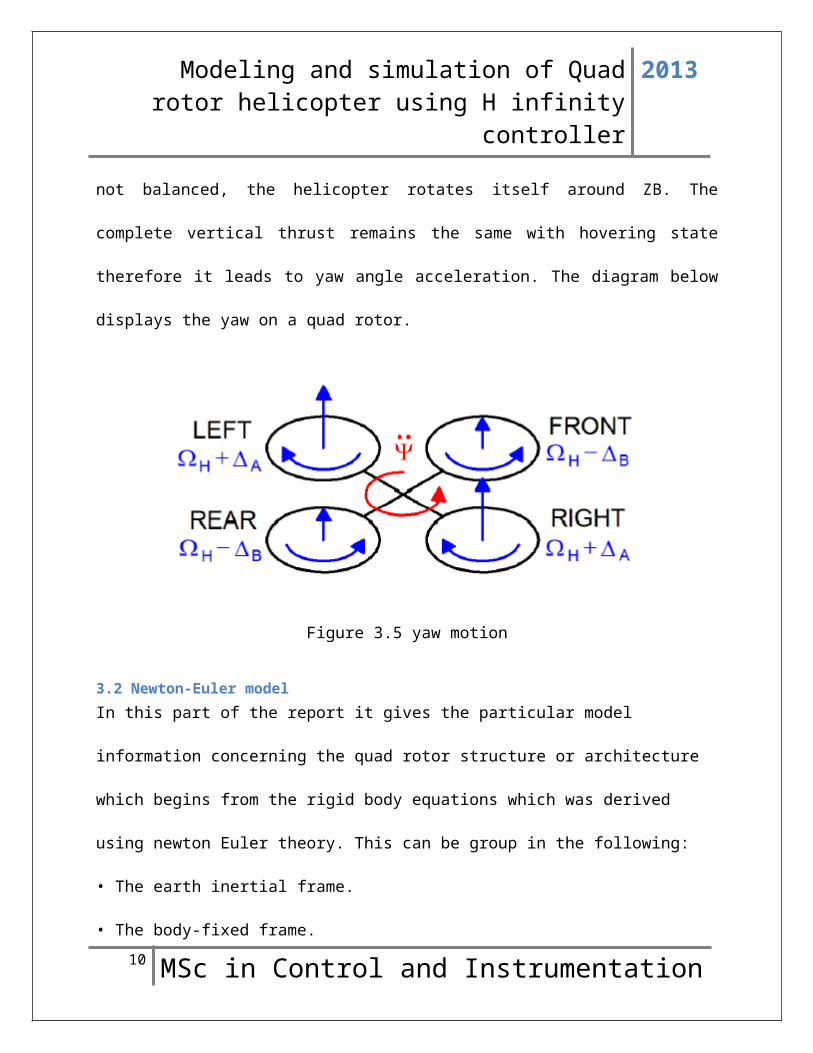
Yaw (U4 [N m])In order to enable this command it is by increasing or decreasing
the speed of the front rear propeller and by decreasing or
increasing the speed of left and right propeller. It gives in to
a torque in connection with the ZB axis which in turn drives the
quad rotor. The movement in yaw is developed when the left-right
propellers turns clockwise while the front-rear propeller turns
counter-clockwise. So therefore, each time the whole torque is
9 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
not balanced, the helicopter rotates itself around ZB. The
complete vertical thrust remains the same with hovering state
therefore it leads to yaw angle acceleration. The diagram below
displays the yaw on a quad rotor.
Figure 3.5 yaw motion
3.2 Newton-Euler modelIn this part of the report it gives the particular model
information concerning the quad rotor structure or architecture
which begins from the rigid body equations which was derived
using newton Euler theory. This can be group in the following:
• The earth inertial frame.
• The body-fixed frame.10 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
• The inertia matrix is time-invariant.
The motion equation is more easily created in the body-fixed
frame due to some certain reasons:
• The body symmetry can be assumed to analyze the equations.
Equation (3.1) explains the kinematics of a rigid-body.
ᶓ = JӨ V ---------------------------------------- (3.1)
Where by ᶓ is the velocity vector E-frame, V is the velocity
vector B-frame and JӨ is the generalized matrix.
ᶓ is composed of the quad rotor linear ᴦE [m] and angular ΘE
[rad] position vectors-frame as shown in equation (3.2)
ᶓ=¿ ------------------------- (3.2)
Similarly is composed of the quad rotor linear VB [m s−1] and
angular ῳB [rad s−1] velocity vectors WRT B-frame as shown in
equation (3.3)
V=¿ ---------------------------- (3.3)
In addition, the generalized matrix JӨ is composed of 4 sub-matrixes according to equation (3.4).
11 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
JӨ=[RӨ 03x303x3 TӨ
] --------------------------- (3.4)
The notation 03×3 means a sub-matrix with dimension 3 times 3
filled with all zeros while the rotation RӨ and the transfer TӨ
matrices are defined according to equations (3.5) and (3.6).
RӨ=[CΨCӨ −SΨCϕ+CΨSӨSϕ CΨSӨCϕ+SΨSϕSΨCӨ CΨCӨ+SΨSӨSϕ −CΨSϕ+SΨSӨCϕ−SӨ CӨSϕ CӨCϕ ] ------------------- (3.5)
TӨ=[1 SϕtӨ CϕtӨ0 Cϕ −Sϕ0 Sϕ/CӨ Cϕ /CӨ ]--------------- (3.6)
Considering the previous equations this notation has been
adopted: ck = cos k, sk = sin k, tk = tan k.
The dynamics of a generic rigid-body takes into account the mass
of the body m [kg] and its inertia matrix I [N m s2]. The
dynamics is described by equation (3.7).
[mI3x3 03x3
03x3 I ][VB
wB]+[wBx(MVB)WBx(IwB)]=[FBᴦB]------------------ (3.7)
12 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Where the notation I3×3 means a 3 times 3 identity matrix.VB [M
s−2] is the quad rotor linear acceleration vector B-frame while
WBB [rad s−2] is the quad rotor angular acceleration vector B-
frame. In addition, FB [N] is the quad rotor forces vector B-
frame and ᴦB [N m] is the quad rotor torques vector B-frame.
(Where c=cos and s=sin).
The equations of motion can be written using the force moment
balance
13 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
| θ¿⋅¿I
xx=(−F
1−F
2+F3
+F4)l ¿
ϕ¿⋅¿I
yy=(−F
1+F2+F3
−F4
)l ¿
ψ¿⋅¿I
zz=(τ
m1−τ
m2+τm3
−τm4
)¿
x¿
¿ y¿⋅¿=1
m∑14F
i[sinψsinθcosϕ−cosψsin ϕ] ¿
z¿⋅¿=1
m∑14 F
i[cos ϕcosθ ]−g
¿
(2)
Where Fi is the thrust force generated by motor i, l is the length
of the quad-rotor arm, τ is the torque produced by each motor, Ii
14 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
’s the moments of inertia with respect to the axes and m the mass
of the helicopter.
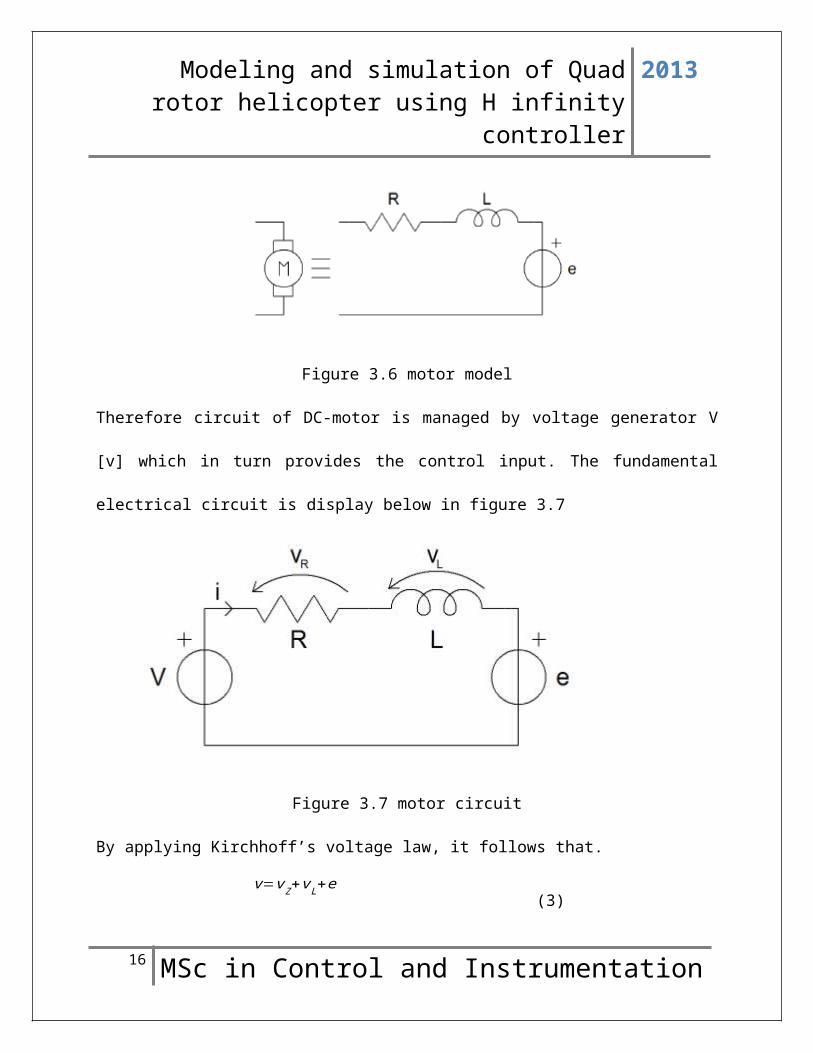
3.3 DC MotorThe DC-motor can be defined as an actuator which therefore
converts electrical energy into mechanical energy. It comprises
of two circuits which are electromagnetic in nature. Therefore
the first is known as rotor which moves around in seconds while
the other is known as stator which does not move. Through the
application DC-current flow in windings, the rotor rotates due to
the force develop through electrical and magnetic reactions.
Moreover the model comprises of resistor R [Ω] in series,
inductor L [H] together with a voltage generator e [V]. Finally
the voltage supplies a voltage which is proportional to the speed
of motor. The model is displays in figure 3.6
15 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Figure 3.6 motor model
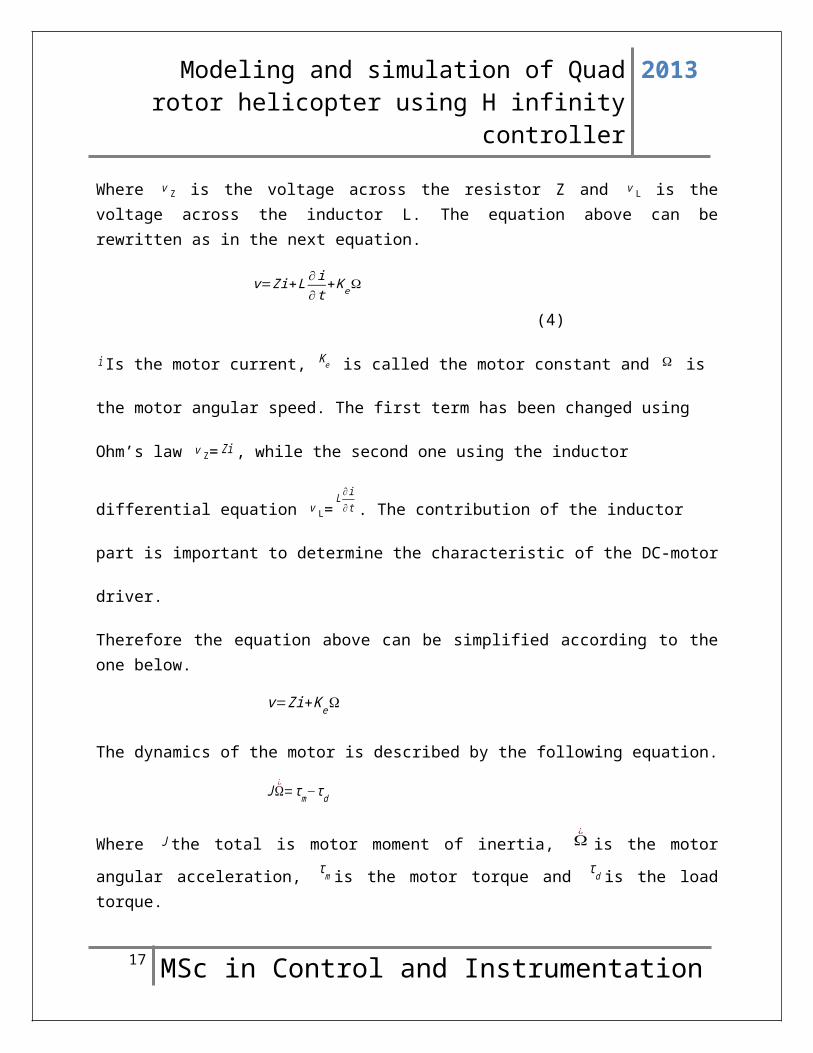
Therefore circuit of DC-motor is managed by voltage generator V
[v] which in turn provides the control input. The fundamental
electrical circuit is display below in figure 3.7
Figure 3.7 motor circuit
By applying Kirchhoff’s voltage law, it follows that.
v=vZ+vL+e (3)
16 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Where v Z is the voltage across the resistor Z and v L is thevoltage across the inductor L. The equation above can berewritten as in the next equation.
v=Zi+L ∂i∂t
+KeΩ
(4)
iIs the motor current, Ke is called the motor constant and Ω is
the motor angular speed. The first term has been changed using
Ohm’s law v Z= Zi , while the second one using the inductor
differential equation v L=L ∂i
∂t . The contribution of the inductor
part is important to determine the characteristic of the DC-motor
driver.
Therefore the equation above can be simplified according to theone below.
v=Zi+KeΩ
The dynamics of the motor is described by the following equation.
JΩ¿=τm−τd
Where J the total is motor moment of inertia, Ω¿
is the motor
angular acceleration, τm is the motor torque and τd is the loadtorque.
17 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Voltage and angular velocity of propeller
Since the voltage inputs V to motors affect the rotational speedΩ of propellers.
V−e=iZ
The dynamics of the motor is described by the following equation
τm−τd=JΩ¿
(8)
Equation (8) states that when the motor torque τm and the drag
torque τd are not equal there is an acceleration (ordeceleration). The back electromotive-force voltage isproportional to motor speed
e=KeΩ (9)
The motor torque is proportional to the field current
τm=Kqi (10)
On substituting, we get
V=τdZKq
+ZJΩ
¿
Kq+KeΩ
(11)
As stated earlier, the drag torque is proportional to the squareof propeller’s speed
τd=DΩ2(12)
The relationship between angular velocity and voltage as found in[51] and [5] can thus be obtained as
18 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
V=ZDΩ2
Kq+ZJΩ
¿
Kq+KeΩ
(13)
Voltage and thrust
Voltage is the input of the quad-rotor plant and each rotorproduces a thrust force as it turns. The motor torque is known tobe proportional to the field current
τm=Kqi (14)
τmKq
=i(15)
The electrical power according to Joule’s law is
P=IV=τmKq
V(16)
And the mechanical power output is given as
Pm=ηP=ητmKq
V(17)
With η as the motor efficiency.
The propeller’s figure of merit f is defined as the ratio of
the induced power in air Ph to the mechanical power Pm [2].
f=PhPm (18)
Where Ph is given by
Ph=ηfτmKq
V(19)
19 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
The ideal power is the product of the thrust force and the speedat which it is applied. At hover Ph is
Ph=Fvh (20)
Where vh is the air velocity
ηfτmKq
V=Fvh (21)
By using the momentum theory
vh=√ F2ρA (22)
Then
ηfτmKq
V=F√ F2ρA (23)
The torque is proportional to the trust with constant ratio Ktdepends on blade geometry.
τm=KtF (24)
Then
ηfKtFKq
V=F√ F2ρA (25)
Then the relationship between thrust and voltage thus establishedas
F=2ρA [fηKtKq ]2
V2
(26)
20 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
a) Roll momentThe roll motion is about x-axis and the rolling moment caused bythe actions of motors 2 and 4 can be defined as:
ϕ¿⋅¿Iyy=(−F
1+F2
+F3−F
4)l
¿ (27)
Since F1 and F3 remain unchanged,
ϕ¿⋅¿I
yy=(F
2−F
4)l
¿ (28)
Substituting equation () for F , we have
ϕ
¿⋅¿Iyy=[(2ρA[fηKtKq ]2V22
)−(2ρA[fηKtKq ]2V42
)]l¿ (29)
The final equation for roll motion is obtained as
ϕ
¿⋅¿=2ρAlIyy [fηKtKq ]
2(V22
−V42
)
¿ (30)
b) Pitch Moment
The pitch motion is about the y-axis and the pitching momentcaused by the actions of motors 1 and 3 can be defined as:
θ¿⋅¿Ixx=(−F
1−F
2+F3
+F4
)l
¿ (31)
Just like that of the roll motion, the final equation for pitchmotion is obtained as
21 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
θ
¿⋅¿=2ρAlIxx [fηKtKq ]
2(V32
−V12
)
¿ (32)
c) Yaw moment
The yaw moment is caused by a counter-torque imbalance. Torqueabout z-axis is generally defined as
ψ¿⋅¿Izz=(τm1−τm2+τm3−τm4)
¿ (33)
From Equation (8) each motor supplies machine torque τm which isbalanced by the drag torque so the net torque on propeller is:
τm=JΩ¿+τd
The yaw torque along z-axis given by:
τzz=Izz ψ¿⋅¿=τm1+τm3−τm2−τm4
¿
Izz ψ¿⋅¿=J(Ω
¿
1+Ω
¿
3−Ω
¿
2−Ω
¿
4)+(τd1+τd3−τd2−τd4 )
¿
Since it has been assumed in equation (12) that the drag torqueis proportional to the square of propeller’s speed,
Izz ψ¿⋅¿=J(Ω
¿
1+Ω
¿
3−Ω
¿
2−Ω
¿
4)+D( Ω
12+Ω
32−Ω
22−Ω
42)
¿
ψ
¿⋅¿= JIzz
(Ω¿
1+Ω
¿
3−Ω
¿
2−Ω
¿
4)+
DIzz
(Ω
12+Ω
32−Ω
22−Ω
42)
¿
22 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
d) Forces along z-axis
From equation (2), the net force at the center of mass of thevehicle is
z¿⋅¿=1
m∑14 Fi [cos ϕcosθ ]−g
¿
On substituting equation (26) for F , we have
z
¿⋅¿=2ρAm [fηKtKq ]
2
(V12+V22
+V32
+V42) (cosθcos ϕ)−g
¿
e) Forces along x-axis
By actuators action, we have the force acting along the x-axis as
On substituting and simplifying further, we have
x
¿⋅¿=2ρaAm [fηKtKq ]
2
(V12+V22
+V32
+V42)[sinϕsinψ+cosϕcos ψsinθ ]
¿
f) Forces along y-axis
Similar to that of the x-axis, actuators action produces thefollowing force, acting along the y-axis
23 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
y
¿⋅¿=2ρaAm [fηKtKq ]
2
(V12+V22
+V32
+V42)[sinψsinθcosϕ−cosψsinϕ ]
¿
CHAPTER 4CONTROL ALGORITHMThis chapter explains the entire control algorithm present in
this report. The first model was done on the Mat lab simulated
model where it was carefully done to evaluate the performance by
utilizing a mathematical approach. This chapter is related
together with the previous one due to analyzing of the quad rotor
model. This has to be done in order to utilize an easier
controller and to reduce the algorithm complexity. Furthermore,
with the help of the parameters determined in the calibration
sheet additional reductions were made possible control chain.
4.1 Control modelingThe dynamics of the quad rotor is well described in the previous
chapter. However the most important concepts can be summarized in
24 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
equations after carefully applied the Taylor series approximation
to get them linearized.
z
¿⋅¿=2ρAm [fηKtKq ]
2
(V12+V22
+V32
+V42) (cosθcos ϕ)−g
¿
For the linearized values of forces along z- axis will be solve
mathematically using Taylor series approximations
dfdV1
=dfdV2
=dfdV3
=dfdV 4
=2pAm
⌈FKtKq
⌉2(2VQ)
By applying the co-efficient
ddz ( ddz (∆Z ))=df
dz∆z+
dfdv
∆V
Therefore the linearized equation will be given as the following
¨Z=
2pAm [fktkq ]
2
(2VQ)(∆V1+∆ V2+∆V3+∆V4)
For the force acting on x-axis which is has the following
equations:
x
¿⋅¿=2ρaAm [fηKtKq ]
2
(V12+V22
+V32
+V42)[sinϕsinψ+cos ϕcos ψsinθ ]
¿
25 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
For the system to go 0.5m x or y direction the theta and phi will
be equal to 2.566 degrees
Ө = ϕ = 2.566, Ψ=0
¨Ẍ=0.00237(¿V12+V22+V32+V42)(0+1)¿
By differentiating the above equation with respect to the voltage
we obtain the following equation
dfdV1
=dfdV2
=dfdV3
=dfdV 4
=2pAm
⌈FKtKq
⌉2(2VQ)
Ẍ=0.00237(2VQ) (V12+V22+V32+V42 ¿
By repeating the above procedure for y axis we obtain the
following equation as our linearized force along y axis but with
negative constants.
Ẍ=-0.00237(2VQ) (V12+V22+V32+V42 ¿
The second system of equations explains how the control commands
that is (T1, T2, T3, and T4).
Those variables are the throttle, roll, pitch and yaw.
T1=Ut+0.7071 (Ur-Up) +Uy
26 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
T2= Ut + 0.7071(-Ur-Up)-Uy
T3=Ut+0.7071(-Ur+Up) +Uy
T4=Ut+0.7071(Ur+Up)-Uy
4.2 H infinity controller
H infinity is being utilized in control to combine controllers in
order to obtain stabilization with a good performance. In other
to utilize H∞ methods, a control engineer convey the control
problem as optimized problem therefore looks for a controller
that solves this issues. H∞ techniques possess a better
performance over classical control techniques to which it is used
to solve problems that deal with multivariable systems in as much
as cross-coupling between channels. It’s very crucial to
understand that the resulting controller is only optimal with
regard to the cost function which does not represent the best
controller in terms of the usual performance measures used to
evaluate controllers such as settling time, energy expended, etc.
H∞ can be regarded as a function of a maximum singular values27 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
over a space. (This can be described as a total gain in every
direction and at some frequency, considering SISO systems; this
is efficiently the total magnitude of the frequency
response.). H∞ techniques can equally be used to reduce the
closed loop effect of a perturbation, which does depending on the
problem formulation; the effect will be obtained in terms of
stabilization or performance.
It can be derived by dissolving Riccati’s two equations.
To design an H infinity controller there are some steps that must
be followed first of all is to select the initial value of ᵞo and
З which are choose from 1 and 0.01 consecutively.
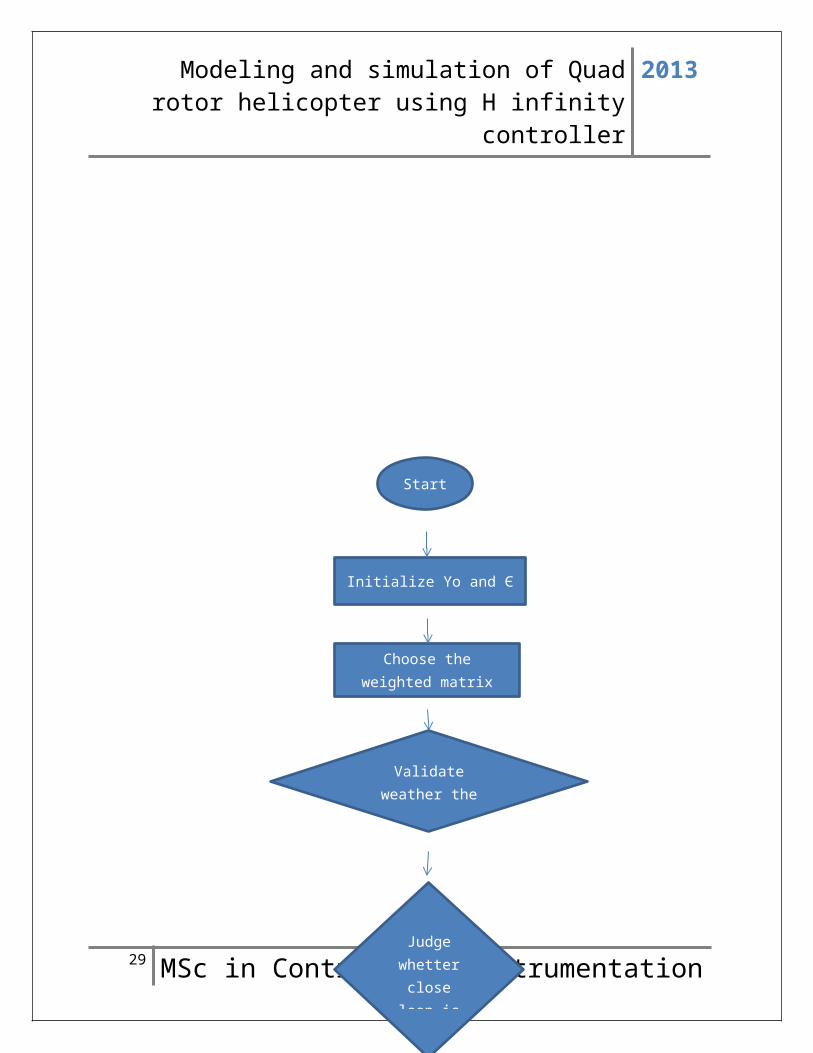
Then select the weighted matrixes W1, W2, W3 then construct the
controller object. The flow chart together with the design step
of the controller is display as follows
28 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
29 MSc in Control and Instrumentation
Start
Initialize ϒo and Є
Choose theweighted matrix
Validateweather the
Judgewhetterclose
loop is
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
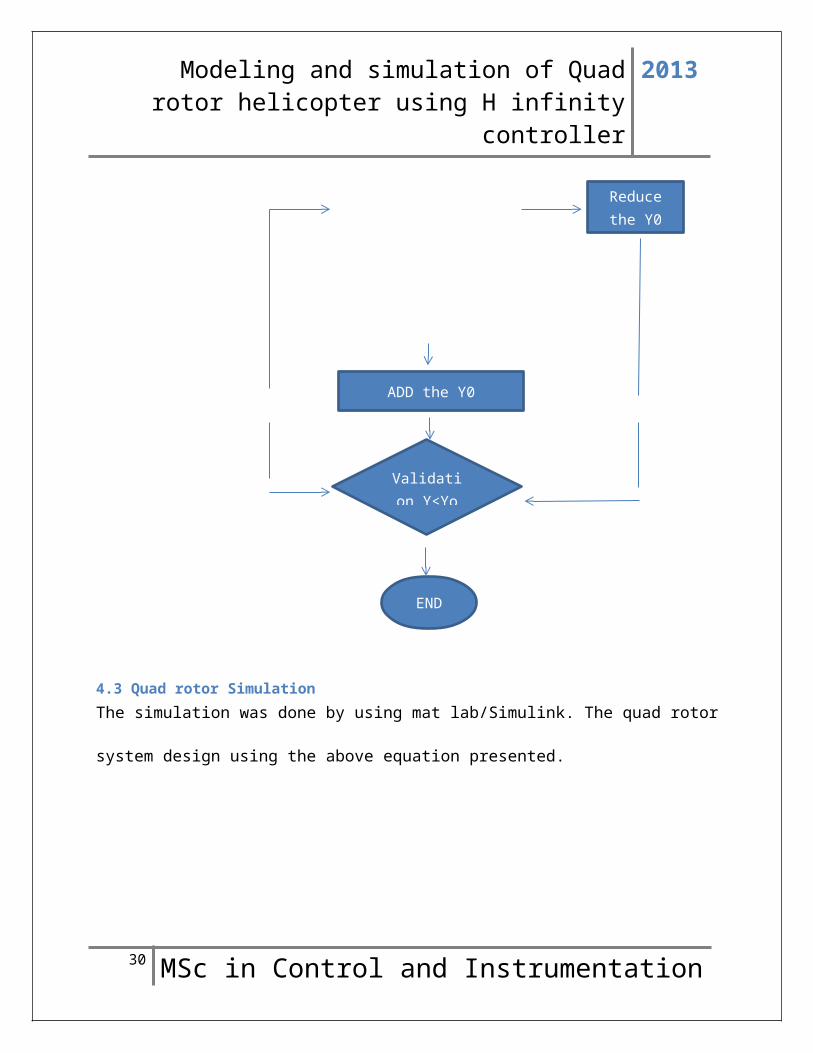
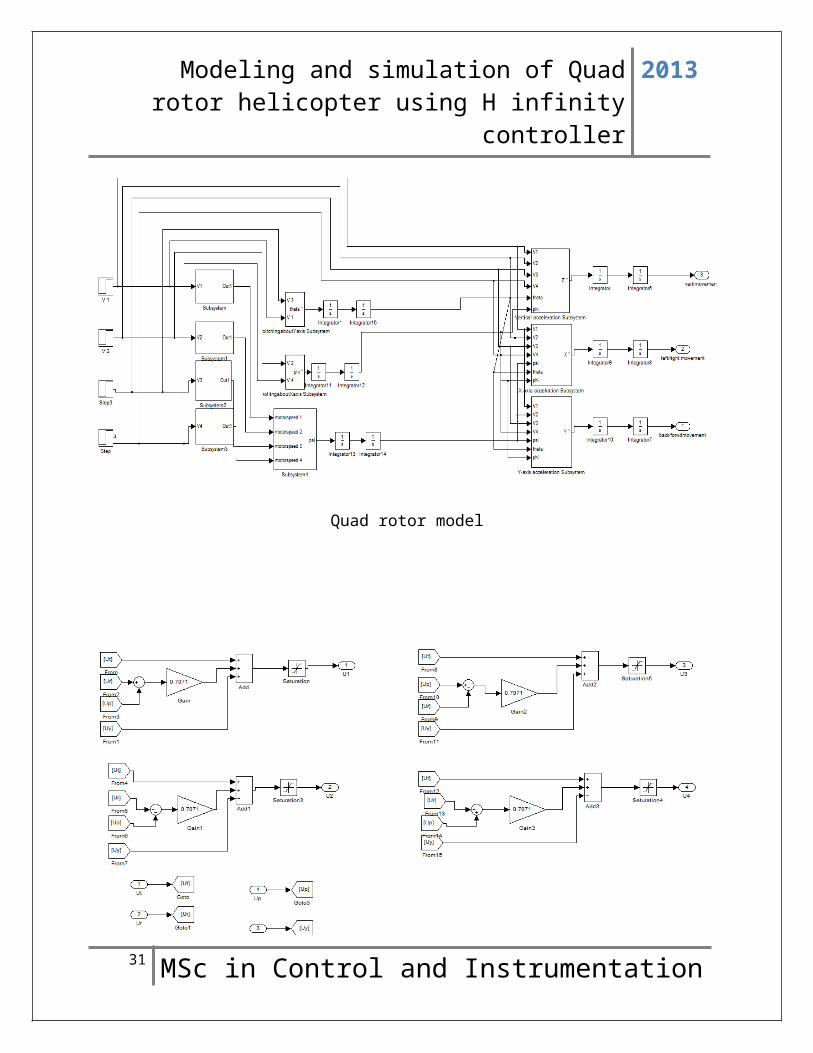
4.3 Quad rotor SimulationThe simulation was done by using mat lab/Simulink. The quad rotor
system design using the above equation presented.
30 MSc in Control and Instrumentation
Validation ϒ<ϒo
ADD the ϒ0
END
Reducethe ϒ0
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Quad rotor model
31 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
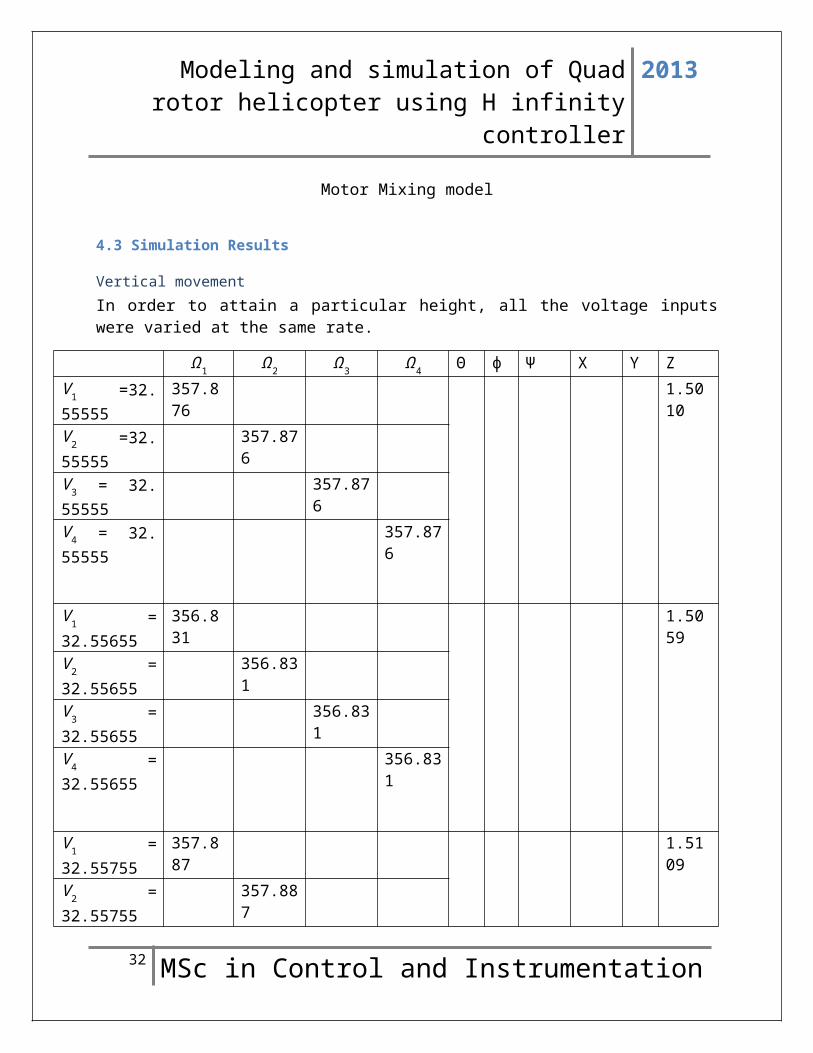
Motor Mixing model
4.3 Simulation Results
Vertical movement In order to attain a particular height, all the voltage inputswere varied at the same rate.
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55555
357.876
1.5010
V2 =32.55555
357.876
V3 = 32.55555
357.876
V4 = 32.55555
357.876
V1 =32.55655
356.831
1.5059
V2 =32.55655
356.831
V3 =32.55655
356.831
V4 =32.55655
356.831
V1 =32.55755
357.887
1.5109
V2 =32.55755
357.887
32 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
V3 =32.55755
357.887
V4 =32.55755
357.887
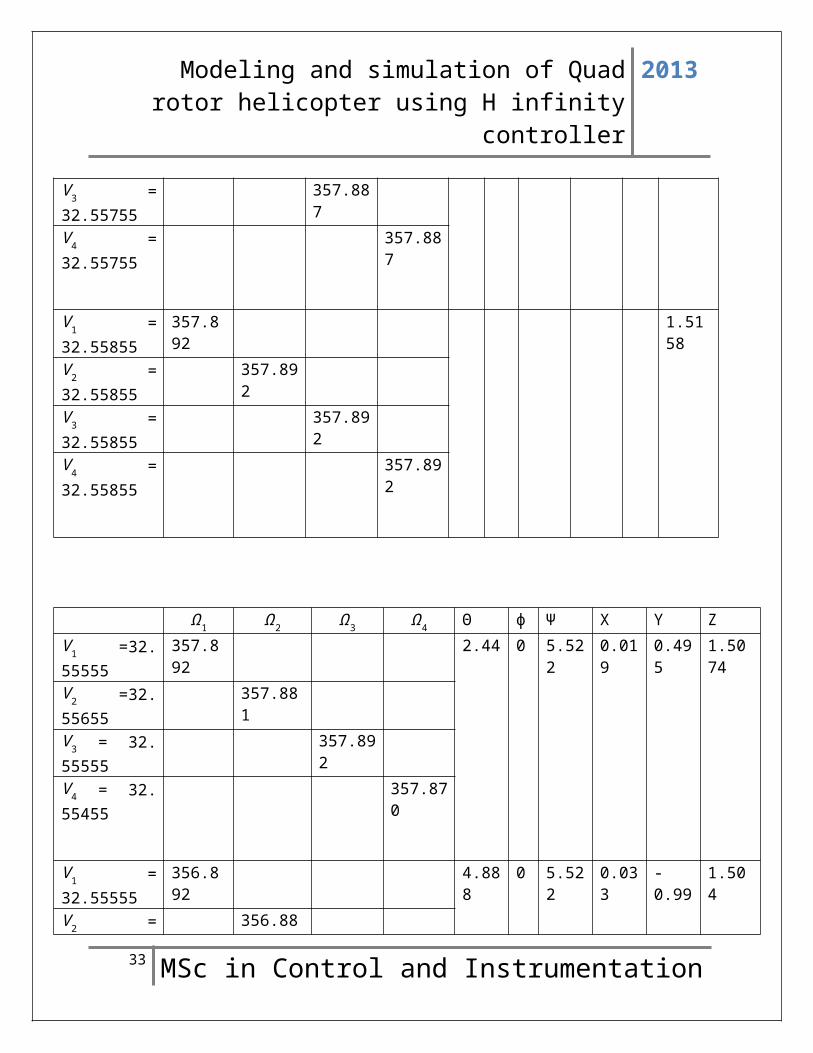
V1 =32.55855
357.892
1.5158
V2 =32.55855
357.892
V3 =32.55855
357.892
V4 =32.55855
357.892
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55555
357.892
2.44 0 5.522
0.019
0.495
1.5074
V2 =32.55655
357.881
V3 = 32.55555
357.892
V4 = 32.55455
357.870
V1 =32.55555
356.892
4.888
0 5.522
0.033
-0.99
1.504
V2 = 356.88
33 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
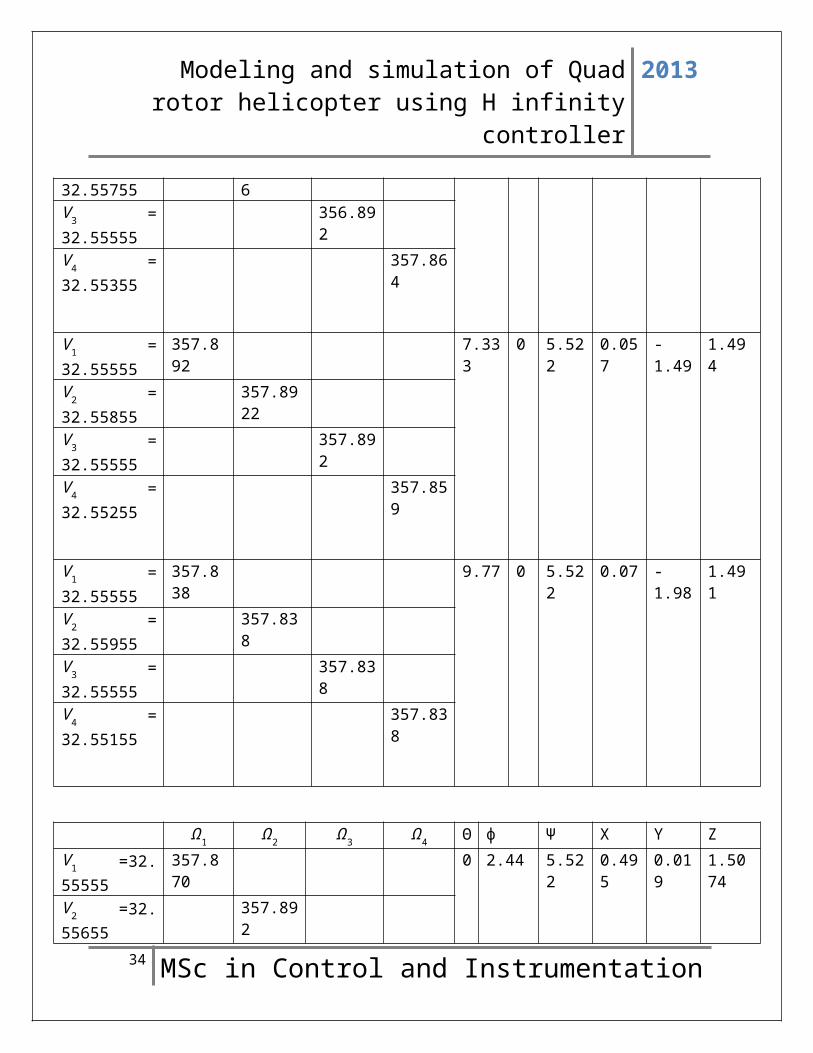
32.55755 6V3 =32.55555
356.892
V4 =32.55355
357.864
V1 =32.55555
357.892
7.333
0 5.522
0.057
-1.49
1.494
V2 =32.55855
357.8922
V3 =32.55555
357.892
V4 =32.55255
357.859
V1 =32.55555
357.838
9.77 0 5.522
0.07 -1.98
1.491
V2 =32.55955
357.838
V3 =32.55555
357.838
V4 =32.55155
357.838
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55555
357.870
0 2.44 5.522
0.495
0.019
1.5074
V2 =32.55655
357.892
34 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
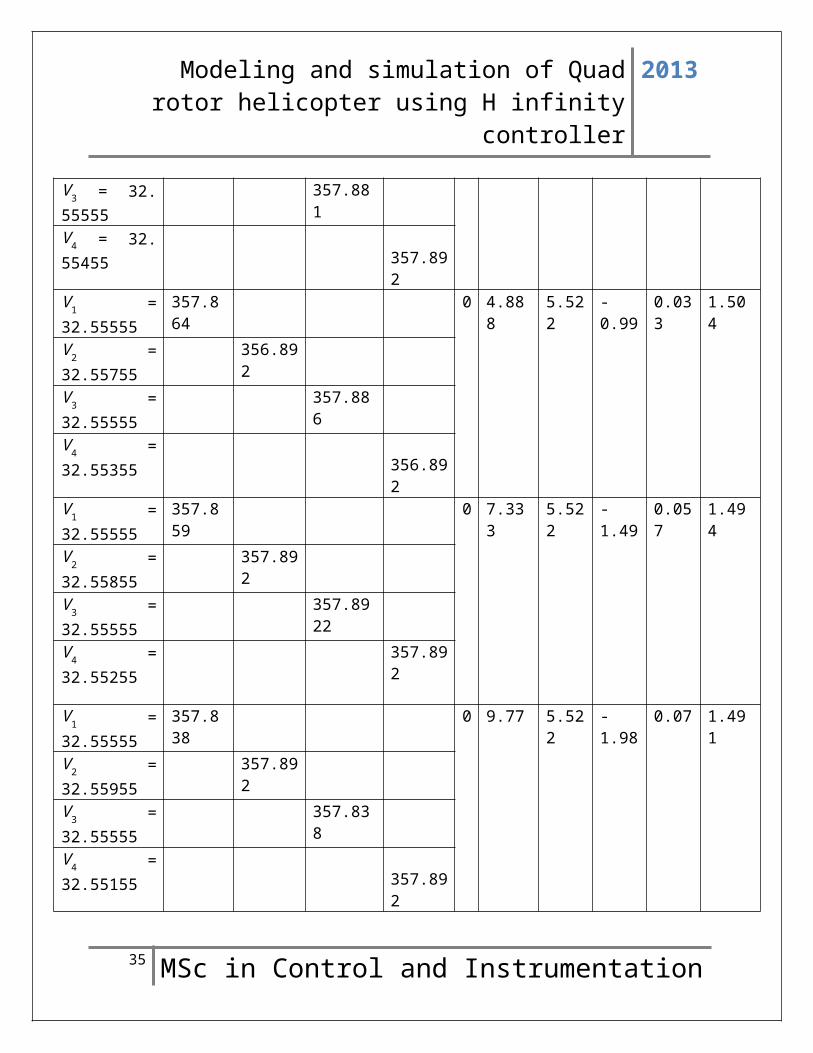
V3 = 32.55555
357.881
V4 = 32.55455 357.89
2V1 =32.55555
357.864
0 4.888
5.522
-0.99
0.033
1.504
V2 =32.55755
356.892
V3 =32.55555
357.886
V4 =32.55355 356.89
2V1 =32.55555
357.859
0 7.333
5.522
-1.49
0.057
1.494
V2 =32.55855
357.892
V3 =32.55555
357.8922
V4 =32.55255
357.892
V1 =32.55555
357.838
0 9.77 5.522
-1.98
0.07 1.491
V2 =32.55955
357.892
V3 =32.55555
357.838
V4 =32.55155 357.89
2
35 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
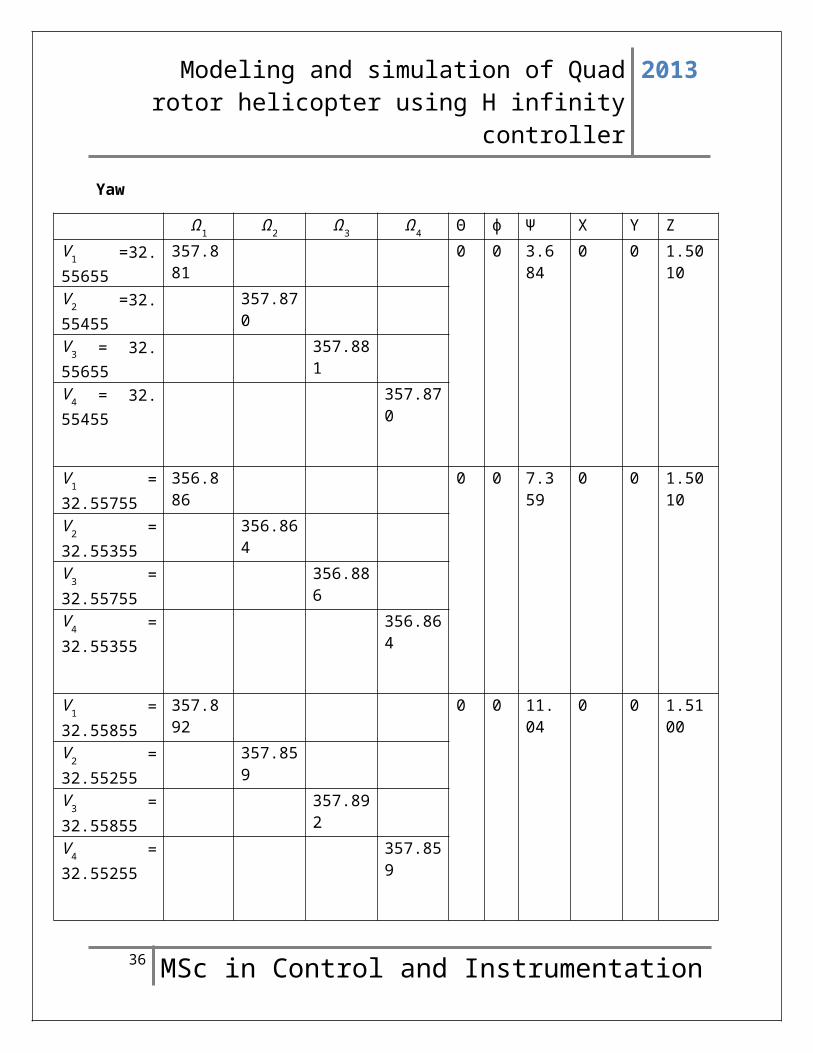
Yaw
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55655
357.881
0 0 3.684
0 0 1.5010
V2 =32.55455
357.870
V3 = 32.55655
357.881
V4 = 32.55455
357.870
V1 =32.55755
356.886
0 0 7.359
0 0 1.5010
V2 =32.55355
356.864
V3 =32.55755
356.886
V4 =32.55355
356.864
V1 =32.55855
357.892
0 0 11.04
0 0 1.5100
V2 =32.55255
357.859
V3 =32.55855
357.892
V4 =32.55255
357.859
36 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
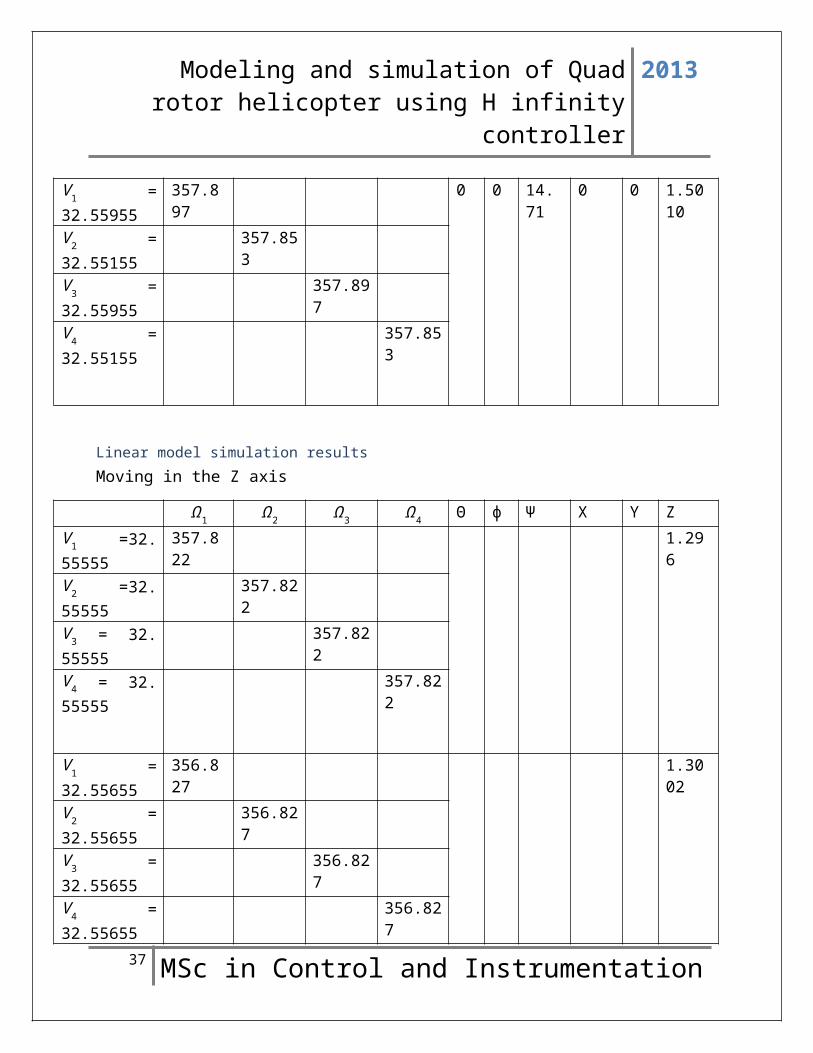
V1 =32.55955
357.897
0 0 14.71
0 0 1.5010
V2 =32.55155
357.853
V3 =32.55955
357.897
V4 =32.55155
357.853
Linear model simulation resultsMoving in the Z axis
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55555
357.822
1.296
V2 =32.55555
357.822
V3 = 32.55555
357.822
V4 = 32.55555
357.822
V1 =32.55655
356.827
1.3002
V2 =32.55655
356.827
V3 =32.55655
356.827
V4 =32.55655
356.827
37 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
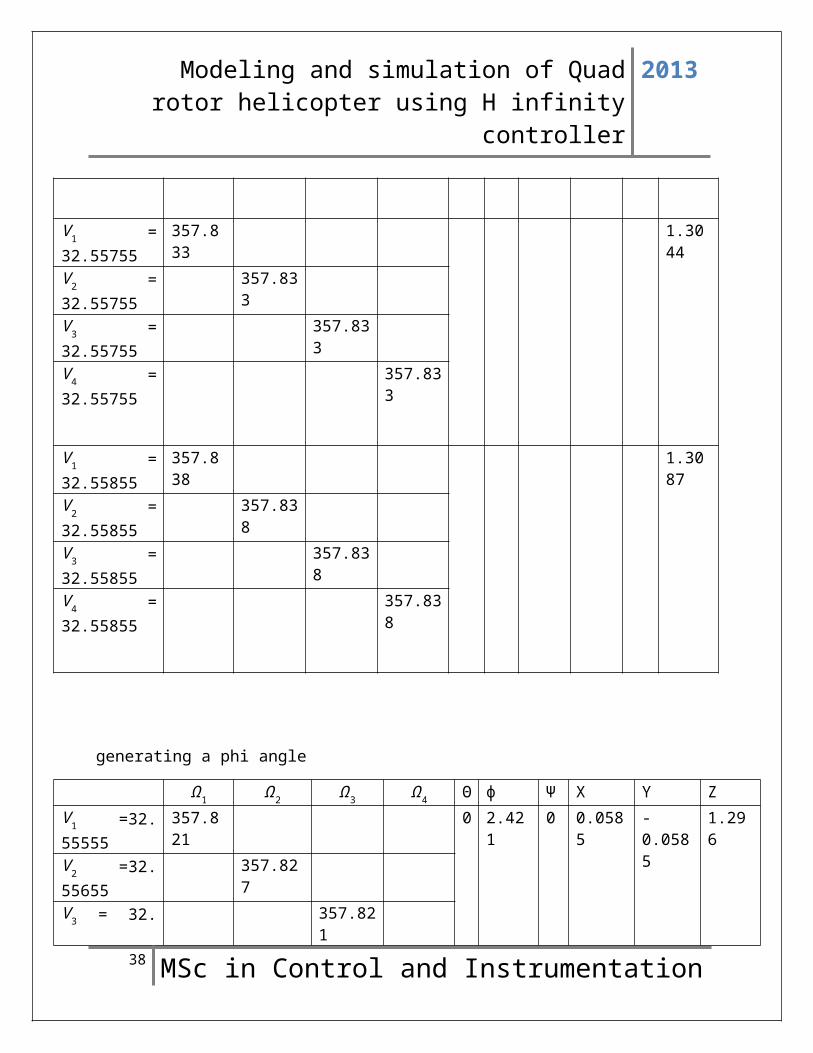
V1 =32.55755
357.833
1.3044
V2 =32.55755
357.833
V3 =32.55755
357.833
V4 =32.55755
357.833
V1 =32.55855
357.838
1.3087
V2 =32.55855
357.838
V3 =32.55855
357.838
V4 =32.55855
357.838
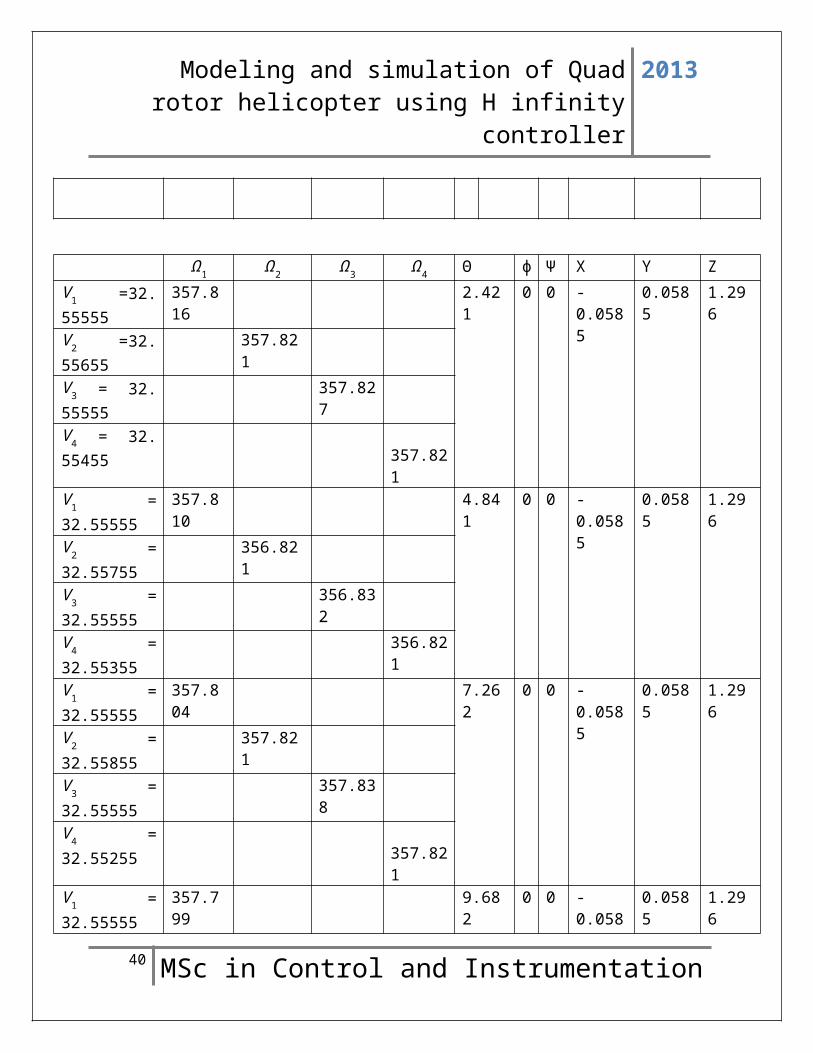
generating a phi angle
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55555
357.821
0 2.421
0 0.0585
-0.0585
1.296
V2 =32.55655
357.827
V3 = 32. 357.821
38 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
55555V4 = 32.55455
357.816
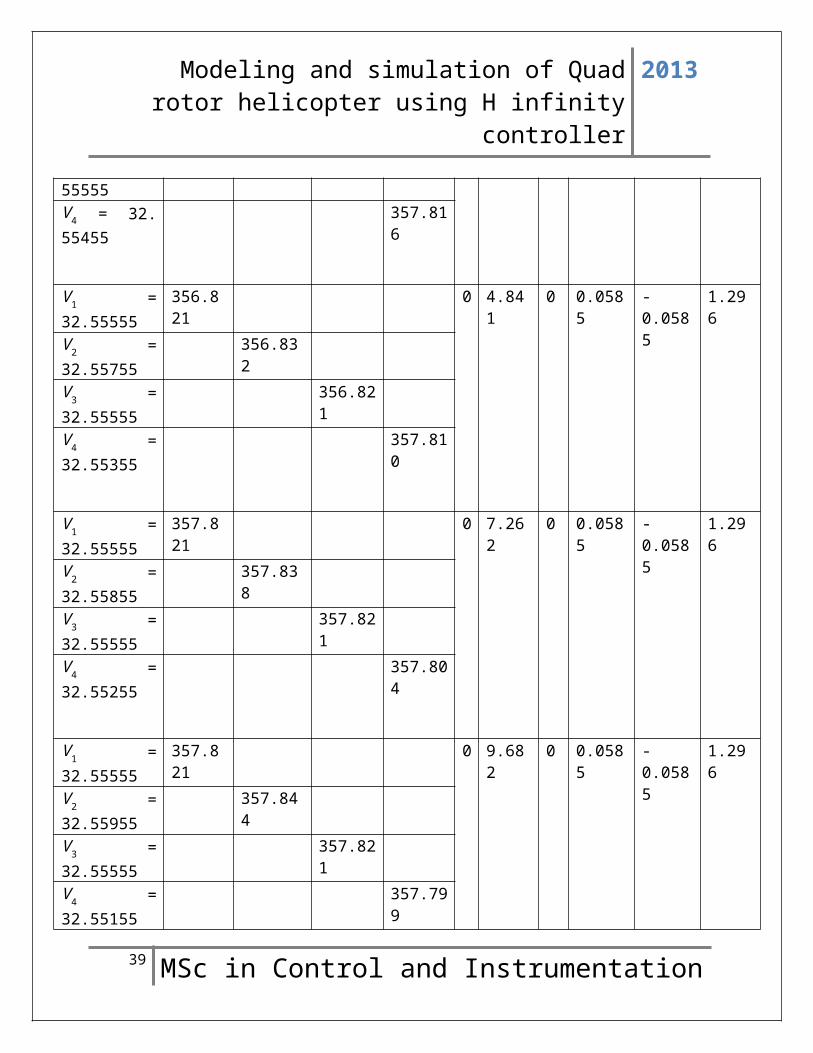
V1 =32.55555
356.821
0 4.841
0 0.0585
-0.0585
1.296
V2 =32.55755
356.832
V3 =32.55555
356.821
V4 =32.55355
357.810
V1 =32.55555
357.821
0 7.262
0 0.0585
-0.0585
1.296
V2 =32.55855
357.838
V3 =32.55555
357.821
V4 =32.55255
357.804
V1 =32.55555
357.821
0 9.682
0 0.0585
-0.0585
1.296
V2 =32.55955
357.844
V3 =32.55555
357.821
V4 =32.55155
357.799
39 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
Ω1 Ω2 Ω3 Ω4 Θ ɸ Ψ X Y ZV1 =32.55555
357.816
2.421
0 0 -0.0585
0.0585
1.296
V2 =32.55655
357.821
V3 = 32.55555
357.827
V4 = 32.55455 357.82
1V1 =32.55555
357.810
4.841
0 0 -0.0585
0.0585
1.296
V2 =32.55755
356.821
V3 =32.55555
356.832
V4 =32.55355
356.821
V1 =32.55555
357.804
7.262
0 0 -0.0585
0.0585
1.296
V2 =32.55855
357.821
V3 =32.55555
357.838
V4 =32.55255 357.82
1V1 =32.55555
357.799
9.682
0 0 -0.058
0.0585
1.296
40 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
5V2 =32.55955
357.821
V3 =32.55555
357.844
V4 =32.55155 357.82
1
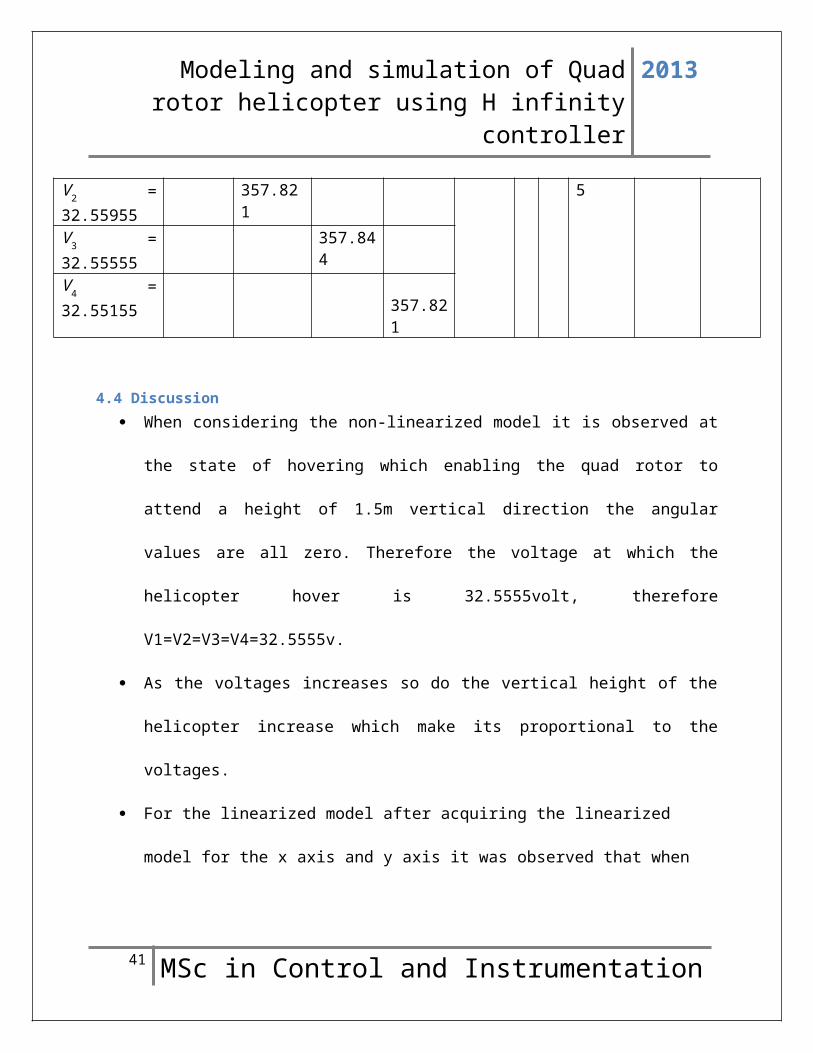
4.4 Discussion When considering the non-linearized model it is observed at
the state of hovering which enabling the quad rotor to
attend a height of 1.5m vertical direction the angular
values are all zero. Therefore the voltage at which the
helicopter hover is 32.5555volt, therefore
V1=V2=V3=V4=32.5555v.
As the voltages increases so do the vertical height of the
helicopter increase which make its proportional to the
voltages.
For the linearized model after acquiring the linearized
model for the x axis and y axis it was observed that when
41 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
the voltage are being change that is V1 and V3 the X and Y
axis which is the distance was not moving.
Another observation noticed was that for the nonlinear model
the angular distance was affecting the movement of the
helicopter while linearize model the angular distance has no
effect on the z, y and x.
4.5 ConclusionThe objective of this test was not successful because the
linearized model for y axis and x axis is mathematically wrong so
the values when the simulation is being debugged show wrong
values.
And beside the H infinity controller was not achieved because the
group initially was supposed to use visual feedback for the model
controller but because school does not have the required
facilities or equipment (camera) for the model. So therefore the
group members decide to use another controller which is H
infinity but when the decision was made it was late for the group
to work on the controller so extra extension was ask but was42 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
turned down so because of the limited time the group was not able
to develop the controller for the assignment.
4.6 Reference Jianying Liu, Shiyue Liu, Qingbo Geng “ The H infinity
Control Algorithm of 3-DOF four Rotor System” Beinjin
Institute of Technology, 2012
University of Derby, Msc in control and instrumentation,
interim report, “Modelling and stimulation of Quad rotor
Helicopter’’
Tommaso Bricsciani, “Modeling, Identification and Control of
a Quad rotor helicopter”, Department of Automatic control
Lund University, October 2008.
43 MSc in Control and Instrumentation
Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
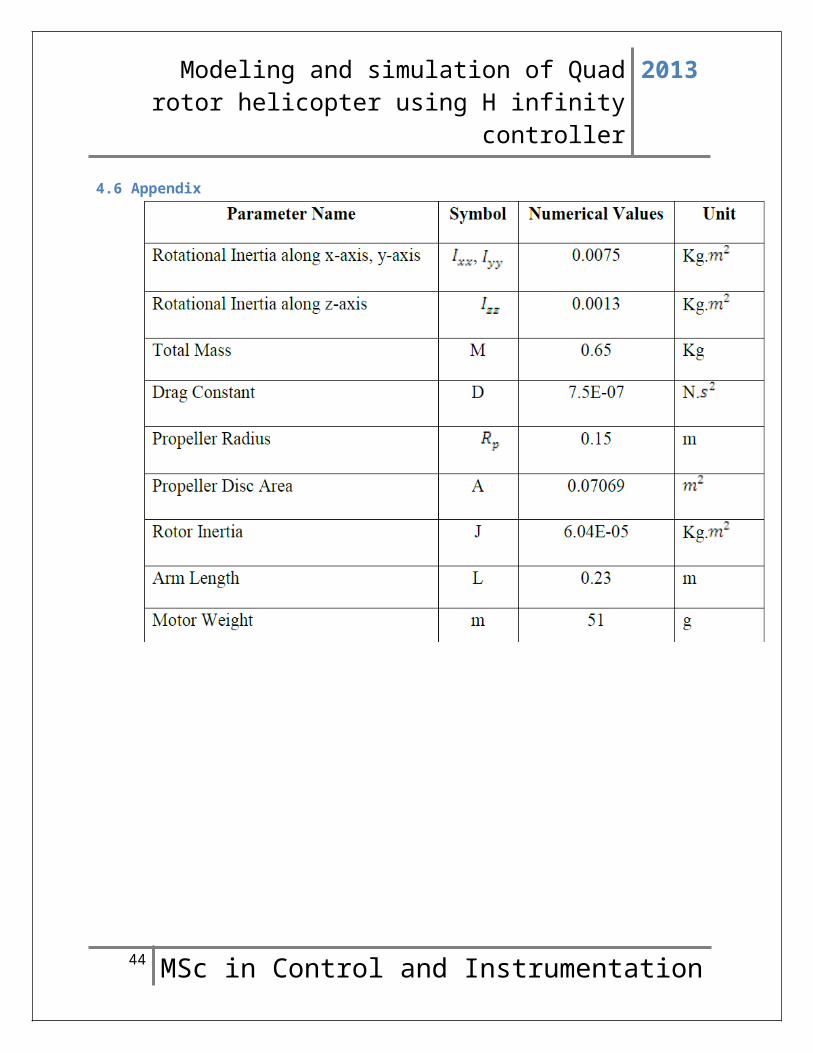
4.6 Appendix
44 MSc in Control and Instrumentation

Modeling and simulation of Quadrotor helicopter using H infinity
controller
2013
45 MSc in Control and Instrumentation