local search algorithms for flow shop scheduling with fuzzy due-dates
TRANSCRIPT

International Journal of Production Economics, 33 (1994) 53-66 Elsevier
53
Local search algorithms for flow shop scheduling with fuzzy due-dates*
Hisao Ishibuchi, Naohisa Yamamoto. Shinta Misaki and Hideo Tanaka
Depurtment gf’ Industria! Engineering, Sukui, Osaka 593, Japan
(Received IS February 1993; accepted
Abstract
College qf‘ Engineering, University qf’ Osaka Pwficture, Gukuert-cho I-I,
in revised form 28 June 1993)
This paper formulates a fuzzy flow shop scheduling problem where the due-date of each job is given as a fuzzy set. The
membership function of the fuzzy due-date corresponds to the grade of satisfaction of a completion time. The objective function
of the formulated problem is to maximize the minimum grade of satisfaction over given jobs. Several local search algorithms
including multi-start descent, simulated annealing and taboo search algorithms are applied to the problem. The performance of
each algorithm is compared with one another by computer simulations on ~ndomiy generated test problems. It is shown by
simulation results that some algorithms do not work well for the fuzzy Bow shop scheduling problem. Thus, a new approach is
proposed by changing the objective function. The effectiveness of this approach is demonstrated by computer simulations.
1. Introduction
Since Bellman and Zadeh [l] introduced the concept of fuzzy decision making, various applications of the fuzzy theory to decision making problems have been presented. For example, Tanaka et al. [2] and Zimmermann [3] formulated fuzzy mathematical program- ming problems. After their work, many ap- proaches have been proposed in the field of fuzzy mathematical programming (see e.g. [4]). However, many promising and interest- ing regions remain to be investigated in the field of fuzzy combinatorial optimization.
RecentIy Ishii et al. [5] introduced the con- cept of fuzzy due-dates to scheduling prob-
C~rres~~nde~ce to: Dr. H. Ishibuchi, Department of Industrial Engineering, College of Engineering, Univer- sity of Osaka Prefecture, Gakuen-cho l-l, Sakai, Osaka 593, Japan. *Original version presented at the Pacific Conference on Manufacturing, Sakai City, Osaka, Japan, November 336, 1992.
Iems. In conventional scheduling problems, with the criterion of minimizing the number of tardy jobs, the due-date of each job is given by a crisp value. Let the due-date of a certain job, say jobj, be fd. Then the grade of satisfaction is 1 (full satisfaction) if the completion time of that job does not exceed t,. Otherwise the grade of satisfaction is 0 (no satisfaction). That is, the grade of satisfaction can be defined for any completion time t (0 < t f as
Uj(t) = i
1 if O-=ctst,,
0 if t, -c t. (1)
This function is depicted in Fig. 1. On the other hand, in fuzzy scheduling problems based on fuzzy due-dates of Ishii et al. [5], the grade of satisfaction gradually decreases after the completion time t has exceeded td as shown in Fig. 2. In Fig. 2, the grade of satisfaction is 1 if the completion time t does not exceed td, and there is no satisfaction if the completion time t exceeds tf. That is, td and tf can be
09255273/94/$07.00 0 1994 Elsevier Science B.V. All rights reserved. SSDl 0925-5273(93)EOO54-Y

54 H. Ishihuchi et ul./Locul scurc,h rrlgorithms ,for jfow shop .scheduling with ,fuz:js due-dates
0.0 1 >t t ri
Fig. I. A membership function of a crisp due-date
+N
1.0 /-.-\
0.0 1 t d
lf >t, tf
Fig. 2. A linear membership function of a fuzzy due-date.
viewed as the due-dates for the full satisfaction and the non-zero satisfaction, respectively (in a sense, td and tf can be viewed as a pessimistic due-date and an optimistic due-date, respec- tively). By linearly interpolating the two points d and,f in Fig. 2, we have the following linear membership function:
I
1 ifO<tgt,,
/lj(t) = 1 - (t - td)/(tf - td) if td < tZ$ t J,
0 if tf -=c t.
(2)
When the total tardiness or maximum tardi- ness is considered as an objective function in conventional scheduling problems, the grade of satisfaction of each job can be represented by a linear membership function similar to (2).
In this paper, we formulate a fuzzy flow shop scheduling problem based on the concept of fuzzy due-dates. While Ishii et al. [S] restricted the shape of membership functions of fuzzy due-dates within the linear type in Fig. 2, we have no assumption on membership functions because the satisfaction of a decision maker may be appropriately represented by a non- linear membership function in a particular situation. The fuzzy flow shop scheduling problem is formulated as the maximization problem of the minimum grade of satisfaction
over given jobs. Various local search algo- rithms are applied to this problem, which in- clude two multi-start descent algorithms, a simulated annealing algorithm [6, 71 and two taboo search algorithms [S, 93. The first move type and the best move type are examined as multi-start descent algorithms and taboo search algorithms. The performance of each algorithm is compared with one another by computer simulations on randomly generated test problems. It is shown by simulation results that some algorithms do not work well for the fuzzy flow shop scheduling problem. By chang- ing the objective function, we reformulate the fuzzy flow shop scheduling problem. The refor- mulated problem is more tractable by local search algorithms. Therefore, the original prob- lem is solved by applying each algorithm to the reformulated one. The effectiveness of this strat- egy is demonstrated by computer simulations.
2. Fuzzy flow shop scheduling problem
2.1. Flow shop scheduling
We first briefly describe the m-machine and n-job flow shop scheduling. Let the processing time and the completion time of job j on machine i be tp(i,j) and tc(i,j), respectively. The sequence of n jobs is denoted by an n-dimensional vector X = (Xi, x2, . . . ) xn), where xk represents the kth processing job. The completion time of each job corresponding to the sequence x can be calculated as
Ml, x1) = 441, Xi), (3)
tc(i, x1) = tc(i - 1, xi) + tp(i, x1)
for i = 2,3, . , m, (4)
Ml, -y/J = k(l, q-1) + fP(l, .%J
for k = 2, . . . , n, (5)
tc(i, xk) = max{t&i - 1, &), tc(i, xk- ,)}.
+ tp(i, xk) for i = 2, 3, . . . , m;
k = 2,3, . . . , n. (6)

H. Ishibuchi et al./Local search algorithms for ,jow shop scheduling with ,fizzy due-dates 55
Flow shop scheduling problems are to deter- mine the sequence x of y1 jobs based on a spe- cific criterion such as the minimization of makespan.
Since Jonson’s work [lo] on the two-ma- chine and n-job flow shop scheduling problem, the sequencing literature has been published. Various heuristic approaches (e.g. [l 1, 121) well as techniques (e.g. 141) have proposed (for see [15]).
several approaches on local techniques such simulated annealing
taboo search been applied flow shop problems [16-l
2.2. Formulation qf:fuzzy flow shop scheduling problem
A fuzzy due-date is associated with each job and represented by a fuzzy set on R+ (the positive part of real numbers). We denote the membership function of the fuzzy due-date of job j by pj(t) which represents the grade of satisfaction when the completion time is t. Therefore, when the sequence of n jobs is given as x, the grade of satisfaction of job xk is represented as
rU,$c(mr xk)), k = 1,2, . . . , II, (7)
where t&m, xk) is the completion time of the job xk, which is calculated by (3H6).
A fuzzy flow shop scheduling problem is to maximize the minimum grade of satisfaction over y1 jobs, i.e. to maximize
f(x) = min { pX,(tc(m, x~)): k = 1, 2, . . . , n}.
(8)
Therefore, our problem is to find the sequence x of y1 jobs that maximizes the objective func- tion f(x).
2.3. Determination of membership ,functions qf .fuzzy due-dates
We have formulated the fuzzy flow shop scheduling problem as the maximization prob-
lem of the objective function f(x) in (8). The most difficult and important issue in the for- mulation is how to determine the membership function ccj(t) of the fuzzy due-date of each job. In general, the determination of the member- ship function is subjective, and there is no standard procedure.
If the linear membership function in Fig. 2 is appropriate for a certain job, the fuzzy due- date of that job can be determined by specify- ing the values of td and tJ. On the other hand, there may be many situations where the grade of satisfaction rapidly decreases, as in Fig. 3, or stays near to 1, as in Fig. 4, after the comple- tion time t has exceeded td. In such a situation, a non-linear membership function is more suit- able for representing the fuzzy due-date than a linear one.
Non-linear membership functions in Figs. 3 and 4 can be written as
PjCf) =
I
1 if O< tstd,
{ 1 - (t - td)/(tS - td)}u if t, < t 6 t s, (9)
0 if tf < t,
Fig. 3. A non-linear membership function of due-date (convex).
Fig. 4. A non-linear membership function of due-date (concave).
a fuzzy
a fuzzy

56
/-ljCt)
Fig. 5. Determination of a non-linear membership func- tion by td, t, and t,
where u is a positive constant. p&t) in (9) co- incides with the linear membership function in Fig. 2 when u = 1. If u > 1, ~j(t) is convex in the interval (fd, ts), as shown in Fig. 3. Con- versely, /Lj(t) is concave as shown in Fig. 4 if 0 < u < 1. While the membership function ,ci(t) in (9) can be exactly specified by the values of fd, tl. and u, the meaning of the value of u is not intuitively clear for a decision maker. Therefore, we propose the following procedure for specifying the membership func- tion in (9). Procedure 1. Determination of the member- ship function in (9). Step 1. Specify the values of td and tS where td
and rs are due-dates for the full satis- faction and the non-zero satisfaction, respectively (see Figs. 3 and 4).
Step 2. Specify the value of t, such that the grade of satisfaction is 0.5 at t, (see Fig. 5).
Step 3. Calculate the value of u that satisfies the following equation:
Pj(tca) = i1 - tf, - rd)l(ff - td)j lU = 0.5. (10)
This procedure remedies the difficulty in di- rectly determining the value of u by introduc- ing rr, between fd and r/.. It should be noted that the linear membership function in Fig. 2 can be obtained by specifying tt, as t, = (td + t,)/2.
In a specific situation such as a just-in-time production system, the full satisfaction will not be attained if the completion time of a certain job is too early. In this case, the membership function in Fig. 6 is more appropriate than those in Figs. l-5. Formally the membership
\,.u
t’a tt, t< t,i t,,tr ’ L
Fig. 6. Determination of a non-linear membership func- tion by six points.
function in Fig. 6 is represented as
/-ljtt) =
1 0 if O< tgtU,
((t - t,)l(G - L))” if t,< tQtc,
1 if t,< tgt d, (11)
(1 - (t - td)/(tf - t,))’ if td < f 6 t s,
0 if If < t,
where u and c are positive constants. This membership function can be determined by the following procedure. Procedure 2. Determination of the member- ship function in (11). Step 1.
Step 2.
Step 3.
Specify the closed interval [tc, r,] and the open interval (t,, tf) such that the grade of satisfaction is 1 in [tc, td] and positive in (t,, tf), respectively (see Fig. 6). Specify the values of th and t, such that the grade of satisfaction is 0.5 at fh and t, (see Fig. 6). Calculate the values of u and I: that satisfy (10) and (12) respectively.
~j(tb) = ((t, - t,)/(t, - t,)i” = 0.5. (12)
It should be noted that the membership function in Fig. 5 can be obtained by specify- ing as t, = f,, = t, = 0 in this procedure. By specifying t, = th = t, = fd = 0, a monoton- ically decreasing membership function can also be obtained, as shown in Fig. 7.
H. Ishibuchi et ul. JLocal search ulgorithms .for.flOw shop .rcheduling with ,fix~ due-dates 57
P,j (t)
:~~ ;t c f
Fig. 7. A monotonically decreasing membership function.
3. Local search algorithms
We apply some local search algorithms to the fuzzy flow shop scheduling problem for obtaining an approximate solution because the attempt to obtain the optimal solution is promising only for small-size problems. Two multi-start descent algorithms, two taboo search algorithms and a simulated annealing algorithm are applied to the problem. The performance of each algorithm is compared with one another by computer simulations.
3. I. Multi-start descent algorithm
Descent algorithms are usually trapped into local optima. Therefore, the final solution de- pends on the initial solution from which the descent search is started. Multi-start descent algorithms intend to obtain a good solution by repeating the descent search from different ini- tial solutions. A multi-start descent algorithm from random initial solutions can be written as follows. Step 1. Randomly generate an initial solu-
tion x. Step 2. Choose a solution y* from the neigh-
borhood of the current solution x such thatf(y*) >f(x). If there is no solution that improves the current solution X, return to step 1.
Step 3. Set x:= y* and return to Step 2. This algorithm is continued within the avail-
able computation time. In computer simula- tions, the total number of evaluations of the objective function in Step 2 is employed as a stopping condition.
Multi-start descent algorithms can be clas- sified into the following two categories ac-
cording to the strategy of neighborhood examination: (1) Best move algorithm. In Step 2, the best
solution in the neighborhood becomes y*. Therefore, all solutions in the neighbor- hood are examined in Step 2.
(2) First moue algorithm. In Step 2, solutions in the neighborhood are examined in random order. The first solution which improves the current one becomes y*. Therefore, only a part of solutions in the neighborhood may be examined in Step 2.
The choice of a neighborhood structure has an effect on the performance of multi-start descent algorithms. In this paper, we use the shift neighborhood employed for simulated annealing algorithms in Osman and Potts [16]. The shift neighborhood is defined by removing a job at one position and putting it to another position. Computational results [16] showed that the shift neighborhood was better than the interchange neighborhood de- fined by exchanging two jobs. The effectiveness of the shift neighborhood was also reported in Taillard [19] for taboo search algorithms.
3.2. Taboo search algorithm
In general, the main issue of local search algorithms is how to escape from local optima. Taboo search algorithms can escape from local optima by continuing the search proced- ure with a list of taboo moves (for details, see [8,9]). The moves from the current solution x to solutions included in the taboo list are forbidden. When the descent search reaches a local optimum, the local optimum (or the move to the local optimum) is added to the taboo list lest the search procedure should return to the same local optimum. In this way. taboo search algorithms can escape from local optima. A taboo search algorithm can be writ- ten as follows. Step 1. Generate an initial solution x, and set
the taboo list as 4 (an empty set). Step 2. Choose a solution y* that is not in-
cluded in the taboo list from the neigh- borhood of the current solution x.

58 H. Ishibuchi et ul./ Locul .wcrrch algorithm ,for .jlow shop scheduling with ,fkq~ due-dates
Step 3. Set x:= y*, renew the taboo list and return to Step 2.
In computer simulations, the total number
where (’ is a control parameter called temper- ature and
of evaluations of the objective function is em- ployed as a stopping condition as in the case of multi-start descent algorithms.
Af = f(x) - .fOl). (14)
Two taboo search algorithms (best move and first move) can be implemented in the same manner as multi-start descent algo- rithms. The shift neighborhood is also employed in the taboo search algorithms. In computer simulations, the taboo list is defined by the pairs of positions and jobs. When the job Xj at thejth position is removed and put at another position, the pair (j, Xj) is added to the taboo list. This type of taboo list was mentioned in Taillard [19]. Various values of taboo list length are examined in computer simulations in Section 3.4.
The acceptance probability p(x --t y) is de- picted in Fig. 8. From Fig. 8, we can see that almost all moves are accepted if the value of c is very Iarge (i.e. high temperature). On the contrary, the moves to inferior solutions (i.e. Af > 0) are hardly accepted if the value of c is very small (i.e. low temperature). In simulated annealing algorithms, the value of c is gradu- ally decreased from a large initial value to a small final value.
The choice of an initial solution in Step 1 has a significant effect on the performance be- cause the taboo search algorithms are basi- cally single-start descent algorithms. The following two methods are examined in com- puter simulations in Section 3.4. (1) Random initial solution. An initial solution
in Step 1 is randomly generated. (2) Heuristic initial solution. An initial solu-
tion is the sequence of n jobs in the order of tS. That is, n jobs are ordered according to their due-dates.
If the sequence of c is given as cl, c2, . . . , cN (N is the total iteration number), a simulated annealing algorithm can be written as follows. Step 1. Randomly generate an initial solution
x, and set i as i:= 0. Step 2. Randomly choose a solution y from
the neighborhood of the current solu- tion x. Let i:= i + 1.
Step 3. Replace x by y with the probability:
p(x + y) = min{ 1, exp( - A,f/Ci)}.
Step 4. If i = N then stop the algorithm, else return to Step 2.
In computer simulations, the heuristic initial solution is also examined in multi-start descent algorithms and a simulated annealing algo- rithm.
In this algorithm, the stopping condition is the total iteration number N. It should be noted that this stopping condition can be viewed as the same as the total number of evaluations of the objective function employed in the multi-start descent algorithms and the
3.3. Simzdated annealing algorithm
Simulated annealing algorithms can escape from local optima by allowing the move from the current solution x to an inferior solution in the neighborhood (for details, see [20, 211). The move from the current solution x to a solution y in the neighborhood is accepted by the following probability: 0.0 -,,Ll-
0.1 1.0 10 100 Control parameter c
p(x + y) = min{ 1, exp( - Af/c)), (13) Fig. 8. Acceptance probability p(x + u).
(15)

H. Ishibuchi et al.1 Local search algorithms ,for j7ow shop scheduling with ,fuzzy due-dates 59
taboo search algorithms. The shift neighbor- hood is also employed in the simulated anneal- ing algorithm.
The choice of the sequence of cts has a sig- nificant effect on the performance of the simulated annealing algorithm. The following method proposed by Kirkpatrick et al. [6] is employed in this paper:
Ci = C1c(t-l for (t - l)~!. < is$tL,
t= I,2 ,..., N/L, (16)
where L and a are constants. In computer simulations, L and c( are specified as
L = N/100, (17)
a = (c,/c,)“99, (18)
from the maximum iteration number N, the initial value cr and the final value cN of the control parameter c. Various combinations of the initial and final values of c are examined in computer simulations in Section 3.4.
3.4. Computer simulations
As test problems, we generated 10 fuzzy flow shop scheduling problems with 10 machines and 20 jobs. These problems are called Type I test problems in this paper (Type II - Type IV test problems are generated in the next section). The processing time of each job on each machine was given as a random integer in the interval [l, 991. One of the following three fuzzy due-dates was assigned to each job with the specified probability. (1) Fuzzy due-date in Fig. 5 (probability 0.3)
t, = tb = t, = 0, td = P rnd[O, 11,
t, = td + P rnd[O, 11,
tf = t, + P rnd[O, 11,
where rnd[O, l] is a random real number in the interval [0, l] and
P = f i tp(i, j)/m. i=l j=l
(19)
(2) Fuzzy due-date in Fig. 6 (probability 0.4)
t, = 0, tb = OSPrnd[O, 11,
t, = tb + OSP rnd [0, 11,
td = t, + P rnd [0, 11,
t, = td + P rnd[O, 11,
tf = t, + P rnd [0, 11.
(3) Fuzzy due-date in Fig. 7 (probability 0.3)
t, = tb = t, = td = 0, t, = 2P rnd [0, 11,
tf = t, + 2Prnd[O, 11.
For the generated 10 test problems, we ap- plied two multi-start descent algorithms, two taboo search algorithms and a simulated annealing algorithm. The stopping condition employed in each algorithm was 10000 evaluations of the objective function. This means that the computational load of each algorithm is the same. The simulation results of two multi-start descent algorithms and a simulated annealing algorithm with c1 = 1 and cN = 0.001 are shown in Table 1. From this table, we can see that these algorithms could not find satisfactory solutions with pos- itive satisfaction grades for many problems. This means that the search procedure did not work well in each algorithm. The reason for these poor results is as follows. Since the objec- tive functionf(x) in (8) is the minimum grade of satisfaction over y1 jobs,f(x) is 0 if the grade of satisfaction of at least one job is 0. Therefore, f(x) will be 0 for a large part of n! solutions. In our test problems, the values of the objective functionf(x) are 0 for 99.93% solutions on the

60 H. Ishibuchi et uI.ILocuI search ulgorithms ,fbr ,ji’ow shop scheduling lrith ,fuzzy due-dutes
average. In this situation, the local search algo- rithms cannot work well because they use the local information about the difference between a current solution and its neighborhood solu- tions.
Generally the performance of simulated an- nealing algorithms strongly depends on the choice of a cooling schedule of the control parameter c. We examined this dependency by performing computer simulations under vari- ous conditions. In computer simulations, the simulated annealing algorithm with the fol- lowing initial and final values of c was applied to the test problems:
initial value of C: 0.1, 1,
final value of C: 0.0001,0.0002,0.0005,
0.001, . . . ) 0.5.
The average values off(x) obtained by the simulated annealing algorithm are sum- marized in Fig. 9. From this figure, we can see that too large values of the control parameter c (i.e. high temperature) deteriorated the per- formance of the simulated annealing algo- rithm. In this figure, the smaller the values of the control parameter, the better the perfor- mance. This may be because the problem of
Table 1 The values off’(x) obtained by two multi-start descent algorithms and a simulated annealing algorithm
Problem number
Descent algorithms
First move Best move
Simulated annealing
1 0.108 0 0 2 0 0 0 3 0.158 0 0.071 4 0 0 0 5 0.443 0.441 0.443 6 0 0 0 I 0 0 0 8 0 0 0.001 9 0 0 0
10 0 0 0.002
Average 0.071 0.044 0.052
local optima is not serious in the 10 test problems.
The simulation results of two taboo search algorithms with a random initial solution are shown in Table 2. In computer simulations, the length of the taboo list was specified as seven (this specification of the length was also em- ployed in [lS] for the conventional flow shop scheduling problem). From Table 2, we can see that these algorithms could not find satisfac- tory solutions with positive satisfaction grades for many problems as in the case of the multi- start descent algorithms and the simulated an- nealing algorithm.
The above algorithms (multi-start descent algorithms, simulated annealing algorithm, taboo search algorithms with a random initial
hmal value ot c
Fig. 9. Average values of,!(x) obtained by a simulated annealing algorithm with various combinations of the initial and final values of c.
Table 2 The values off(x) obtained by two taboo search algo- rithms with a random initial solution
Problem First move Best move number algorithm algorithm
1 2 3 4 5 6 7 8 9
10
Average
0 0 0 0 0.441 0 0.379 0 0 0
0.0820
0 0 0 0 0.439 0 0 0 0 0
0.044
H. Ishibuchi et al.1 Local search algorithms ,fbr jfolv shop scheduling with ,fir-_z~, due-dates 61
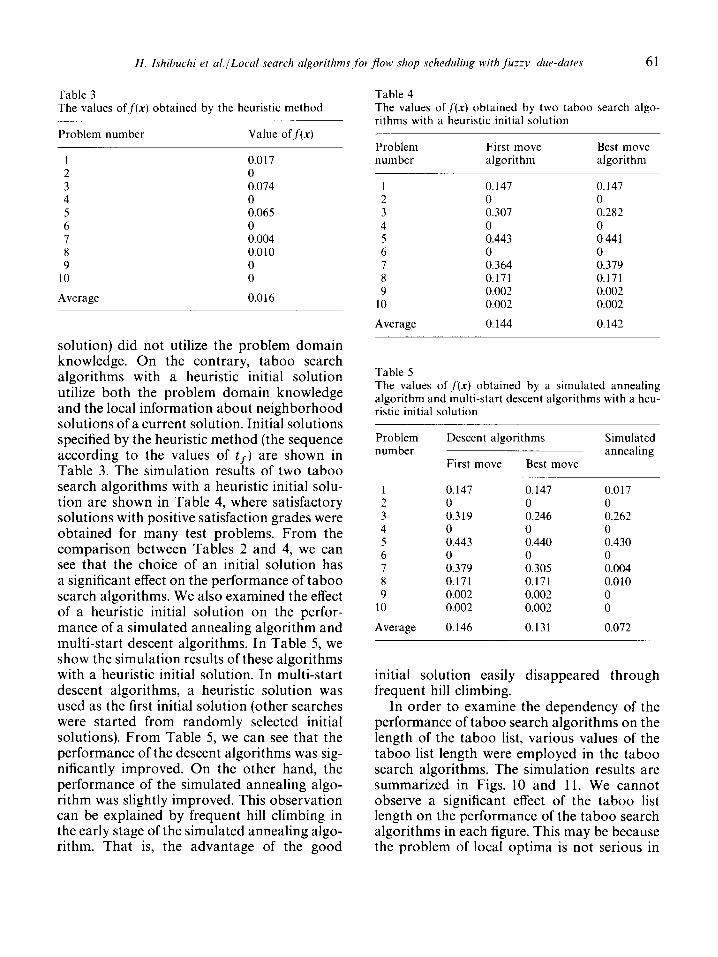
Table 3 The values off(x) obtained by the heuristic method
Problem number Value of f(x)
1 0.017 2 0 3 0.074 4 0 5 0.065 6 0 7 0.004 8 0.010 9 0
IO 0
Average 0.016
solution) did not utilize the problem domain knowledge. On the contrary, taboo search algorithms with a heuristic initial solution utilize both the problem domain knowledge and the local information about neighborhood solutions of a current solution. Initial solutions specified by the heuristic method (the sequence according to the values of tf) are shown in Table 3. The simulation results of two taboo search algorithms with a heuristic initial solu- tion are shown in Table 4, where satisfactory solutions with positive satisfaction grades were obtained for many test problems. From the comparison between Tables 2 and 4, we can see that the choice of an initial solution has a significant effect on the performance of taboo search algorithms. We also examined the effect of a heuristic initial solution on the perfor- mance of a simulated annealing algorithm and multi-start descent algorithms. In Table 5, we show the simulation results of these algorithms with a heuristic initial solution. In multi-start descent algorithms, a heuristic solution was used as the first initial solution (other searches were started from randomly selected initial solutions). From Table 5, we can see that the performance of the descent algorithms was sig- nificantly improved. On the other hand, the performance of the simulated annealing algo- rithm was slightly improved. This observation can be explained by frequent hill climbing in the early stage of the simulated annealing algo- rithm. That is, the advantage of the good
Table 4 The values off(x) obtained by two taboo search algo- rithms with a heuristic initial solution
Problem First move Best move number algorithm algorithm
1 0.147 0.147 2 0 0 3 0.307 0.282 4 0 0 5 0.443 0.441 6 0 0 7 0.364 0.379 8 0.171 0.171 9 0.002 0.002
10 0.002 0.002
Average 0.144 0.142
Table 5 The values of f(x) obtained by a simulated annealing algorithm and multi-start descent algorithms with a heu- ristic initial solution
Problem Descent algorithms Simulated number annealing
First move Best move
1 0.147 0.147 0.017 2 0 0 0 3 0.319 0.246 0.262 4 0 0 0 5 0.443 0.440 0.430 6 0 0 0 7 0.379 0.305 0.004 8 0.171 0.171 0.010 9 0.002 0.002 0
10 0.002 0.002 0
Average 0.146 0.131 0.072
initial solution easily disappeared through frequent hill climbing.
In order to examine the dependency of the performance of taboo search algorithms on the length of the taboo list, various values of the taboo list length were employed in the taboo search algorithms. The simulation results are summarized in Figs. 10 and 11. We cannot observe a significant effect of the taboo list length on the performance of the taboo search algorithms in each figure. This may be because the problem of local optima is not serious in

62 H. Ishihuchi et uI.~LocuI search algorithms ,for Jaw shop scheduling with ,fuzzy due-dates
n.nn- I 2 3 4 5 6 7 8 9 101i12
Length of taboo list
Fig. 10. Average values off(w) obtained by taboo search algorithms with a random initial solution.
I 2 3 4 5 6 7 8 9101112
Length of taboo list
Fig. 11. Average values ofj‘(x) obtained by taboo search algorithms with a heuristic initial solution.
the 10 test problems as in the simulated an- nealing algorithm.
4. Modification of membership function
4.1. Problem reformulation
In Section 3.4, we showed that only the multi-start descent algorithms and the taboo search algorithms with a heuristic initial solu- tion could find satisfactory solutions with positive satisfaction grades for many test problems. Search procedures in all the local search algorithms did not work well from ran- dom initial solutions because the values of the objective function f(x) were 0 for almost all solutions (99.93% in the 10 test problems on the average). In this section, we propose an approach to the improvement of the per- formance of local search algorithms by reformulating the fuzzy flow shop scheduling problem.
Fig. 12. The shape of I’,(C).
Using the membership function pj(t), we define a function vj(t) as
I (t - t& if 0 < t < t,,
Vj(t) = Pjtt) if r,st$t s, (20)
(tf - t)q if tf < t,
where q is a positive constant. The shape of vj(t) corresponding to ~j(t) in Fig. 6 is depicted in Fig. 12. Clearly the following relation holds between vj(t) and pj(t):
rlj(t) = max(O, Vj(t)) (21)
In a sense, the function Vj(t), which can take a negative value, is viewed as an extended membership function of pj(t).
By using the function ~~j(t), the fuzzy flow
shop scheduling problem in Section 2 is modi- fied as the maximization problem of the objec- tive function:
g(x) = min{v,,(t,(m, x~)): k = 1, 2, . . . , n}.
(22)
The value of the original objective function f(x) in (8) is obtained by
f(x) = max(O, g(4). (23)
While the values off(x) are 0 for many x’s (e.g. almost all in the 10 test problems), those of g(x) are different from one another. Therefore, the local search procedure becomes effective in the maximization problem of g(x), as shown in the next subsection.
H. ishibuchi et al.lLocal search algorithms .for ,flow shop scheduling with ,fuzzy due-dates 63
4.2. Computer simulations
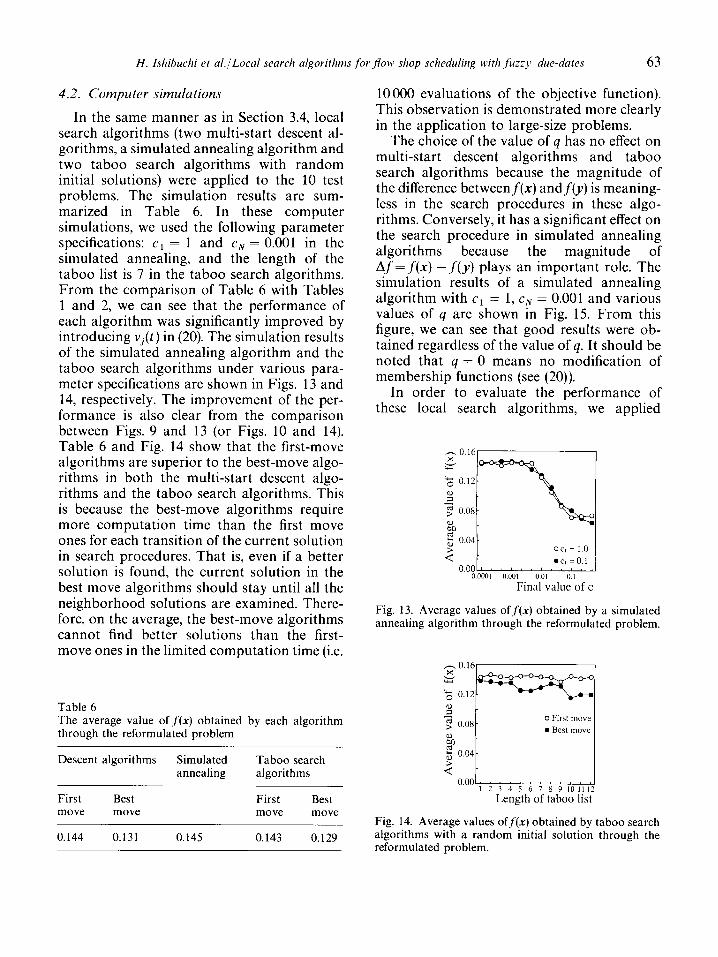
In the same manner as in Section 3.4, local search algorithms (two multi-start descent al- gorithms, a simulated annealing algorithm and two taboo search algorithms with random initial solutions) were applied to the 10 test problems. The simulation results are sum- marized in Table 6. In these computer simulations, we used the following parameter specifications: c1 = 1 and cN = 0.001 in the simulated annealing, and the length of the taboo list is 7 in the taboo search algorithms. From the comparison of Table 6 with Tables 1 and 2, we can see that the performance of each algorithm was significantly improved by introducing Vj(t) in (20). The simulation results of the simulated annealing algorithm and the taboo search algorithms under various para- meter specifications are shown in Figs. 13 and 14, respectively. The improvement of the per- formance is also clear from the comparison between Figs. 9 and 13 (or Figs. 10 and 14). Table 6 and Fig. 14 show that the first-move algorithms are superior to the best-move algo- rithms in both the multi-start descent algo- rithms and the taboo search algorithms. This is because the best-move algorithms require more computation time than the first move ones for each transition of the current solution in search procedures. That is, even if a better solution is found, the current solution in the best move algorithms should stay until all the neighborhood solutions are examined. There- fore, on the average, the best-move algorithms cannot find better solutions than the first- move ones in the limited computation time (i.e.
Table 6 The average value of f(x) obtained by each algorithm through the reformulated problem
Descent algorithms
First Best move move
0.144 0.131
Simulated annealing
0.145
Taboo search algorithms
First Best move move
0.143 0.129
10000 evaluations of the objective function). This observation is demonstrated more clearly in the application to large-size problems.
The choice of the value of 4 has no effect on multi-start descent algorithms and taboo search algorithms because the magnitude of the difference betweenf(x) andf(y) is meaning- less in the search procedures in these algo- rithms. Conversely, it has a significant effect on the search procedure in simulated annealing algorithms because the magnitude of Af = f(x) -f(y) plays an important role. The simulation results of a simulated annealing algorithm with cl = 1, cN = 0.001 and various values of q are shown in Fig. 15. From this figure, we can see that good results were ob- tained regardless of the value,of q. It should be noted that q = 0 means no modification of membership functions (see (20)).
In order to evaluate the performance of these local search algorithms, we applied
0 000, 0001 001 0 I
Final value of c
Fig. 13. Average values off(x) obtained by a simulated annealing algorithm through the reformulated problem.
g 0.16
s
% 0.12
s
-f? 0.08
e,
2 z 0.04
1 2 3 4 5 6 7 8 9 101112
Length of taboo list
Fig. 14. Average values off(x) obtained by taboo search algorithms with a random initial solution through the reformulated problem.

64
(I “()U ” 0 li mo1 10”
Value of the coefficient q
Fig. 15. Average values off‘(x) obtained by a simulated annealing algorithm through the reformulated problem.
Fig. 16. Average values of j’(x) obtained by a random sampling technique.
a random sampling algorithm (random gen- eration of sequences of n jobs) to the 10 test problems. The average value of,f(x) is shown in Fig. 16. From the comparison between Table 6 and Fig. 16, the local search algo- rithms (i.e. multi-start descent, simulated an- nealing and taboo search algorithms) based on 10000 evaluations of the objective function are much better than the random sampling algo- rithm based on 100000 evaluations.
We also examined the performance of each algorithm by other test problems. The follow- ing three type test problems with 10 machines and 20 jobs were generated (Type I test prob- lems are the 10 test problems generated in Section 3.4). (1) Type II test problems are 10 test problems
with the following fuzzy due-dates:
t, = 0, lb = 0.5Prnd[O, 11,
t, = t,, + 0.5Prnd[O, 11,
(2)
(3)
rd = t, + 2Prnd[O, 11,
tr = td + P rnd[O, 11,
tJ. = t, + P rnd[O, 11.
Type III test problems are 10 test problems with the same fuzzy due-dates as Type II test problems except for the specification of t(j:
td = t, t OSP rnd [0, 11.
Type IV test problems are 10 test problems with the same fuzzy due-dates as Type 11 test problems except for the specification of t,:
td = t, + P rnd[O, 11.
These three families of test problems are different from one another in the average length of (td - t,). Since the grade of satisfac- tion is 1 in the closed interval [t,, td], high grades and low grades of satisfaction can be expected in Type II and Type III test prob- lems, respectively. The simulation results are summarized in Table 7. From Table 7, we can see that the expected results about the grade of satisfaction were obtained. We can also see that the performance of each algorithm is sim- ilar to that in Table 6 for Type I test problems. That is, the simulated annealing algorithm and the first move algorithms are superior to the best-move algorithms.
In order to examine the performance of each algorithm for large-size test problems, 40 test problems (10 problems of each type) with 20 machines and 50 jobs were generated in the same manner as the test problems with 10 machines and 20 jobs. We applied each algo- rithm to the generated test problems on the following parameter specifications: The num- ber of evaluations of the objective function is 10 000, c I = 0.1, cN = 0.0001 and the length of the taboo list is 7. The simulation results are summarized in Table 8. In this table, the ad- vantage of the simulated annealing algorithm
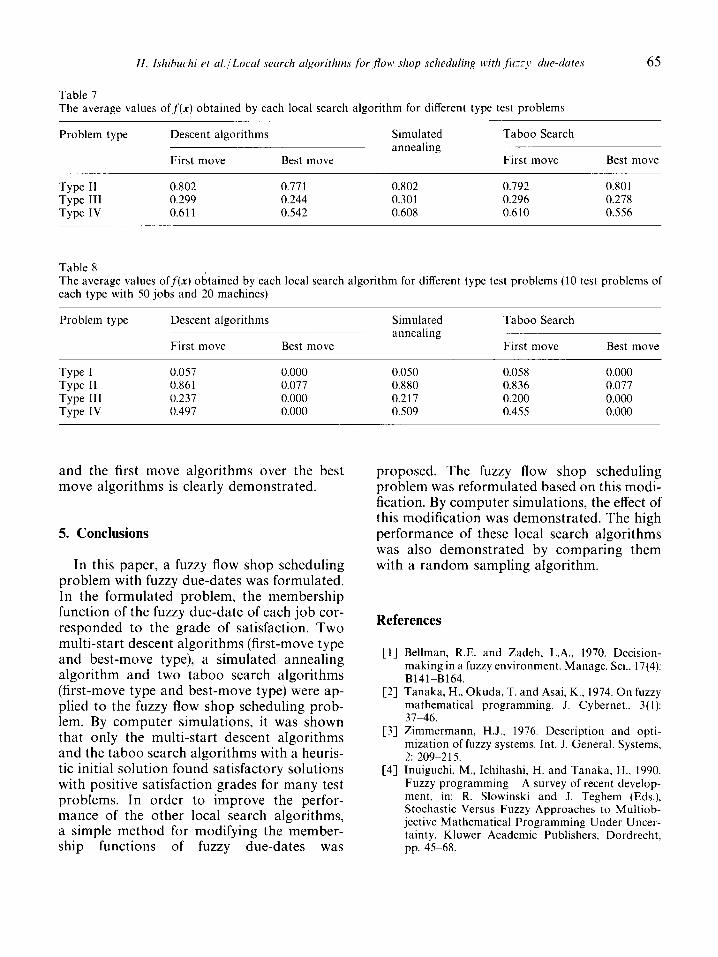
Table I
H. Ishihuchi et al.jLocal search algorithms ,for flow shop scheduling with ,fuzzy due-dates 65
The average values off(x) obtained by each local search algorithm for different type test problems
Problem type Descent algorithms Simulated Taboo Search annealing
First move Best move First move Best move
Type II 0.802 0.771 0.802 0.792 0.801 Type II1 0.299 0.244 0.301 0.296 0.278 Type IV 0.611 0.542 0.608 0.610 0.556
Table 8 The average values off(x) obtained by each local search algorithm for different type test problems (10 test problems of each type with 50 jobs and 20 machines)
Problem type Descent algorithms Simulated Taboo Search annealing
First move Best move First move Best move
Type 1 0.057 0.000 0.050 0.058 0.000 Type II 0.861 0.077 0.880 0.836 0.017 Type III 0.237 0.000 0.217 0.200 0.000 Type IV 0.497 0.000 0.509 0.455 0.000
and the first move algorithms over the best move algorithms is clearly demonstrated.
5. Conclusions
In this paper, a fuzzy flow shop scheduling problem with fuzzy due-dates was formulated. In the formulated problem, the membership function of the fuzzy due-date of each job cor- responded to the grade of satisfaction. Two multi-start descent algorithms (first-move type and best-move type), a simulated annealing algorithm and two taboo search algorithms (first-move type and best-move type) were ap- plied to the fuzzy flow shop scheduling prob- lem. By computer simulations, it was shown that only the multi-start descent algorithms and the taboo search algorithms with a heuris- tic initial solution found satisfactory solutions with positive satisfaction grades for many test problems. In order to improve the perfor- mance of the other local search algorithms, a simple method for modifying the member- ship functions of fuzzy due-dates was
proposed. The fuzzy flow shop scheduling problem was reformulated based on this modi- fication. By computer simulations, the effect of this modification was demonstrated. The high performance of these local search algorithms was also demonstrated by comparing them with a random sampling algorithm.
References
Cl1
PI
131
c41
Bellman, R.E. and Zadeh, L.A., 1970. Decision- making in a fuzzy environment. Manage. Sci., 17(4): B141lB164. Tanaka, H., Okuda, T. and Asai. K., 1974. On fuzzy mathematical programming. J. Cybernet., 3( 1): 37746. Zimmermann, H.J., 1976. Description and opti- mization of fuzzy systems. Int. J. General. Systems, 2: 2099215. Inuiguchi, M., Ichihashi, H. and Tanaka, H., 1990. Fuzzy programming A survey of recent develop- ment, in: R. Slowinski and J. Teghem (Eds.), Stochastic Versus Fuzzy Approaches to Multiob- jective Mathematical Programming Under Uncer- tainty. Kluwer Academic Publishers, Dordrecht, pp. 45568.
[S] Ishii, H., Tada, M. and Masuda. T., 1992. Two scheduling problems with fuzzy due-dates. Fuzzy Sets Systems, 46(3): 339-347.
[6] Kirkpatrick, S., Gelatt Jr., C.D. and Vecchi, M.P., 1983. Optimization by simulated annealing. Sci., 220: 67 l-680.
[7] Cerny, V., 1985. Thermodynamical approach to the traveling salesman problem ~ An efficient simula- tion algorithm. J. Optim. Theory Appl., 45(l): 41-51.
[S] Glover, F., 1989. Taboo Search ~ Part 1. ORSA J. Comput., l(3): 19&206.
[9] Glover, F., 1990. Taboo Search Part 2. ORSA J. Comput., 2(l): 4~ 32.
[IO] Johnson, SM., 1954. Optimal two- and three-stage production schedules with setup times included. Navel Res. Logistics Quart., l(1): 61-68.
[l l] Dannenbring, D.G., 1977. An evaluation of flow shop sequencing heuristics. Manage. Sci., 23(11): 1174 1182.
[12] Nawaz, M., Enscore Jr., E.E. and Ham, I., 1983. A heuristic algorithm for the m-machine and n-job flow-shop sequencing problem. OMEGA, 11(l): 91-95.
1131 Ignall, E. and Schrage, L.E., 1965. Application of branch- and bound technique to some flow shop problems. Oper. Res.. 13(3): 400&412.
1141 Lomnicki. Z., 1965. A branch- and-bound algo- rithm for the exact solution of the three-machine scheduling problem. Oper. Res. Quart., 16(l): 899107.
[I 51 Dudek, R.A., Panwalkar, S.S. and Smith, M.L., 1992. The lessons of flow-shop scheduling research. Oper. Res., 40(l): 7713.
[16] Osman, I.H. and Potts, C.N., 1989. Simulated an- nealing for permutation flow-shop scheduling. OMEGA, 17(6): 551-557.
[ 171 Ogbu, F.A. and Smith, D.K., 1990. The application of the simulated annealing algorithm to the solu- tion of the n/rnjC,,,,, flowshop problem. Comput. Oper. Res., 17(3): 2433253.
[lS] Widmer, M. and Hertz, A.. 1989. A new heuristic method for the flow shop sequencing problem. Eur. J. Oper. Res., 41(2): 186 -193.
1191 Taillard, E., 1990. Some efficient heuristic methods for the flow shop sequencing problem. Eur. J. Oper. Res., 47(l): 65 74.
[20] Van Laarhoven, P.J.M. and Aarts, E.H.L.. 1987. Simulated Annealing: Theory and Applica- tions, Kluwer Academic Publishers, Dordrecht. 187 pp.
[21] Aarts. E.H.L. and Korst, J., 1989. Simulated Annealing and Boltzmann Machines, Wiley, Chichester, 272 pp.