handout momentum sudut dan benda tegar
TRANSCRIPT
TUGASFISIKA DASAR I
MOMENTUM SUDUTDAN
BENDA TEGAR
Dosen Pembimbing:Drs. M. Arifuddin Jamal, M.Pd
PROGRAM STUDI PENDIDIKAN FISIKAJURUSAN PENDIDIKAN MATEMATIKA DAN IPAFAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
1
Pusat massa
Pusat massa
UNIVERSITAS LAMBUNG MANGKURAT2011/2012
1. BENDA TEGAR (RIGID BODIES)
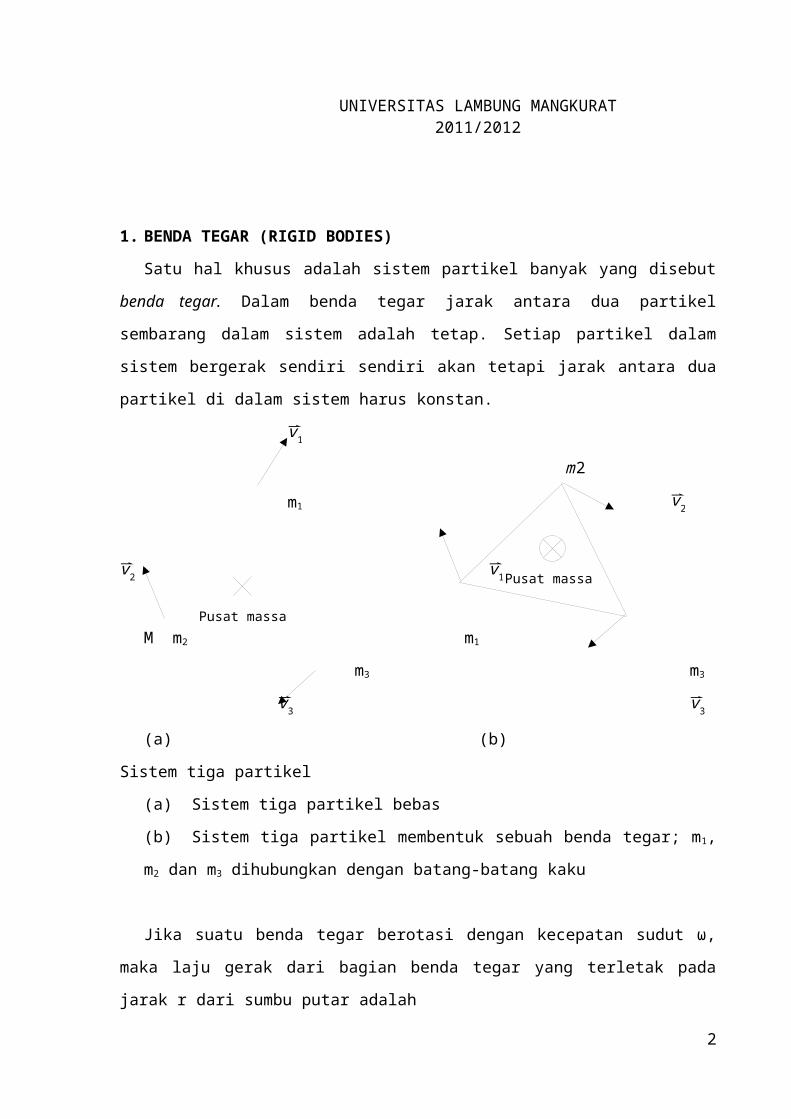
Satu hal khusus adalah sistem partikel banyak yang disebut
benda tegar. Dalam benda tegar jarak antara dua partikel
sembarang dalam sistem adalah tetap. Setiap partikel dalam
sistem bergerak sendiri sendiri akan tetapi jarak antara dua
partikel di dalam sistem harus konstan.
v⃑1
m2
m1 v⃑2
v⃑2 v⃑1
M m2 m1
m3 m3
v⃑3 v⃑3
(a) (b)
Sistem tiga partikel
(a) Sistem tiga partikel bebas
(b) Sistem tiga partikel membentuk sebuah benda tegar; m1,
m2 dan m3 dihubungkan dengan batang-batang kaku
Jika suatu benda tegar berotasi dengan kecepatan sudut ω,
maka laju gerak dari bagian benda tegar yang terletak pada
jarak r dari sumbu putar adalah
2
dt
v=dsdt
= ddt (rθ)=r dθdt
=rω
Arah kecepatan v ini adalah tangensial, yaitu arah garis
singgung pada lintasan di titik dimana benda berada pada suatu
saat.
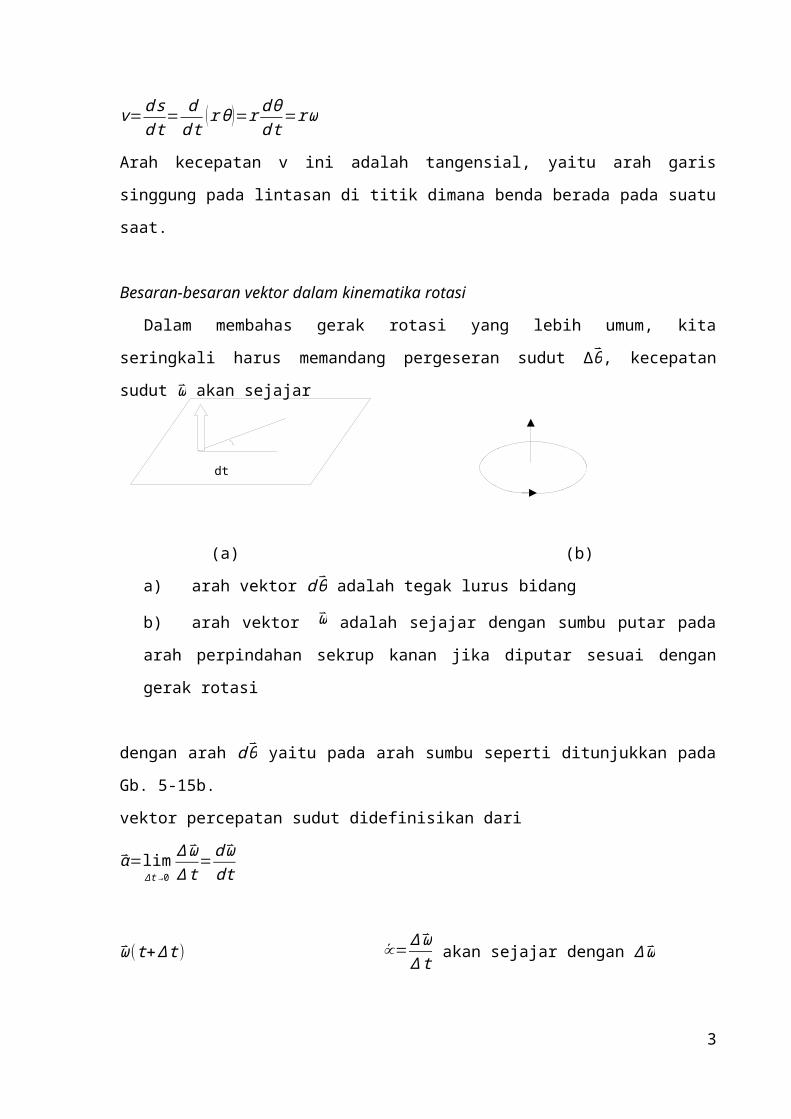
Besaran-besaran vektor dalam kinematika rotasi
Dalam membahas gerak rotasi yang lebih umum, kita
seringkali harus memandang pergeseran sudut Δθ⃑, kecepatansudut ω⃑ akan sejajar
(a) (b)
a) arah vektor dθ⃑ adalah tegak lurus bidang
b) arah vektor ω⃑ adalah sejajar dengan sumbu putar padaarah perpindahan sekrup kanan jika diputar sesuai dengan
gerak rotasi
dengan arah dθ⃑ yaitu pada arah sumbu seperti ditunjukkan padaGb. 5-15b.
vektor percepatan sudut didefinisikan dari
α⃑=limΔt→0
∆ ω⃑∆t
=dω⃑dt
ω⃑(t+∆t) ∝́=∆ ω⃑∆t akan sejajar dengan ∆ ω⃑
3
∆ ω⃑=(∝́∆t) Vektor percepatan sudut sesaat α⃑diperoleh jika
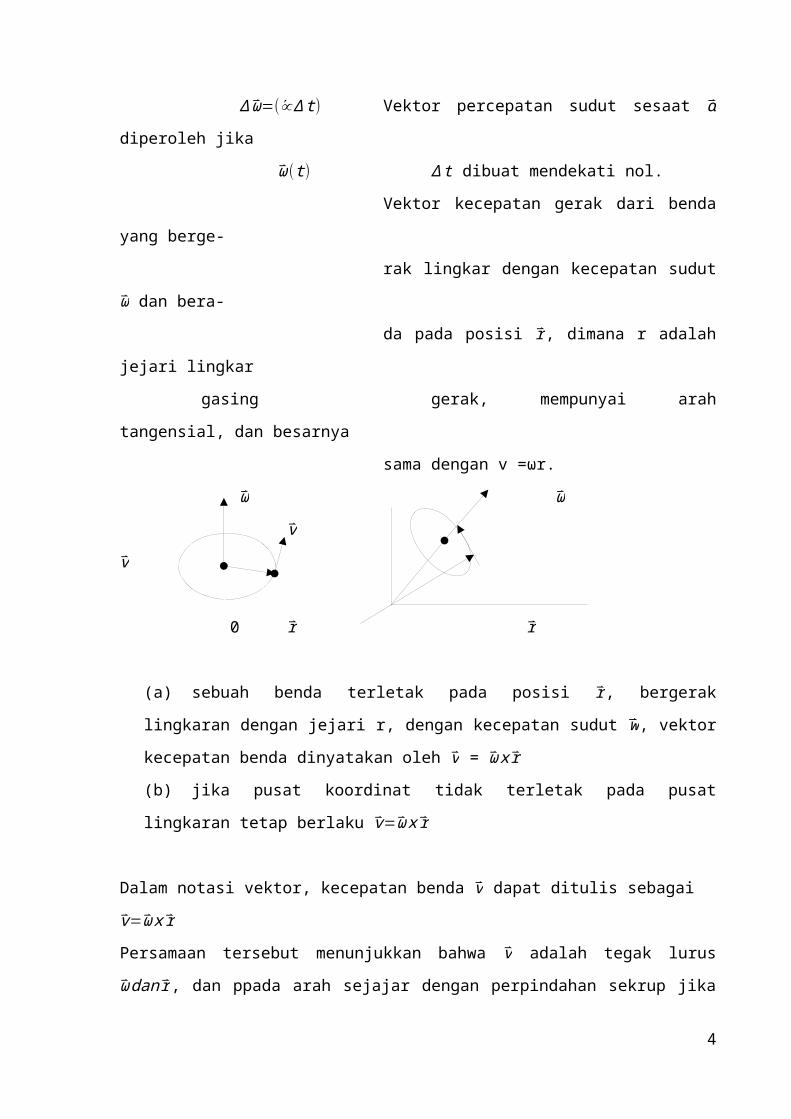
ω⃑(t) ∆t dibuat mendekati nol.Vektor kecepatan gerak dari benda
yang berge-
rak lingkar dengan kecepatan sudut
ω⃑ dan bera-da pada posisi r⃑, dimana r adalah
jejari lingkar
gasing gerak, mempunyai arah
tangensial, dan besarnya
sama dengan v =ωr.
ω⃑ ω⃑v⃑
v⃑
0 r⃑ r⃑
(a) sebuah benda terletak pada posisi r⃑, bergerak
lingkaran dengan jejari r, dengan kecepatan sudut w⃑, vektorkecepatan benda dinyatakan oleh v⃑ = ω⃑xr⃑(b) jika pusat koordinat tidak terletak pada pusat
lingkaran tetap berlaku v⃑=ω⃑x r⃑
Dalam notasi vektor, kecepatan benda v⃑ dapat ditulis sebagaiv⃑=ω⃑x r⃑Persamaan tersebut menunjukkan bahwa v⃑ adalah tegak lurus
ω⃑danr⃑, dan ppada arah sejajar dengan perpindahan sekrup jika
4
diputar dari arah ω⃑ ke arah r. Hubungan di atas juga berlakuuntuk hal yang lebih umum, yaitu jika titik asal 0 dari sumbu
koordinat tidak terletak pada pusat lingkaran gerak. Dalam hal
ini maka arah v⃑ adalah tegak lurus arah ω⃑ dan r, akan tetapibesar v diberikan oleh
v = ωr sin θdimana θ adalah sudut antara ω⃑ dan r⃑.
2. MOMENTUM SUDUT BENDA TEGAR
Sampai saat ini pembahasan kita adalah benda ttik atau
partikel. Hal ini berarti bahwa ukuran dan betuk benda
diabaikan jika dibandingkan dengan lintasan benda. Satu hal
khusus adalah sistem partikel banyak yang disebut benda tegar,
dimana jarak antara dua partikel sembarang dalam sistem tetap.
Setiap partikel dalam sistem bergerak sendiri-sendiri akan
tetapi jarak antara dua partikel di dalam sistem lurus tetap.
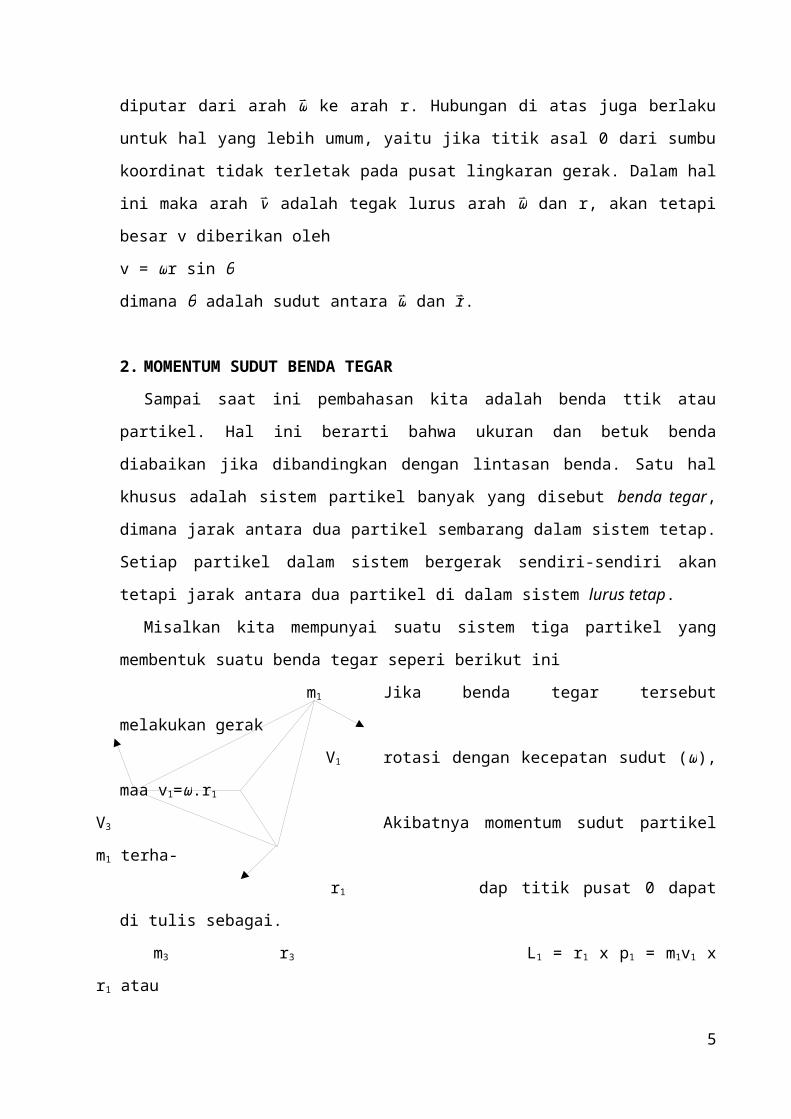
Misalkan kita mempunyai suatu sistem tiga partikel yang
membentuk suatu benda tegar seperi berikut ini
m1 Jika benda tegar tersebut
melakukan gerak
V1 rotasi dengan kecepatan sudut (ω),maa v1=ω.r1
V3 Akibatnya momentum sudut partikel
m1 terha-
r1 dap titik pusat 0 dapat
di tulis sebagai.
m3 r3 L1 = r1 x p1 = m1v1 x
r1 atau
5

r2 L2 = m1r1 x (ω1 x r1)
(1)
m2 Dari kalkulus diperoleh
bahwa persamaan (1)
V2 dapat dituliskan
r1 x (ω x r1) = ω1(r1.r1) – r1(r1.ω1)
Jika pusat dari r terletak pada bidang gerak lingkar, maka r1
ω, sehinggar1 . ω = r1ω cos 90 = 0 maka diperolehr1 x (ω1 x r1 = r1
2ω
Akibatnya momentum sudut partikel m1 dapat ditulis
L1 = m1 r12 ω
Dengan cara yang sama dapat disimpulkan bahwa momentum
sudut partike m2 dan m3 masing-masing adalah
L2 = m2 r22 ω dan L3 = m3 r3
2 ω
Dengan deimikian momentum total dari sistem adalah
Ltotal = L1 + L2 + L3 atau
L = (m1 r12 + m2
2 + m3 r32) ω
L = I ω (2)
Dengan I = m1 r12 + m2 r2
2 + m3 r32 atau
I=∑i=1
3m1r1
2(3)
6
Persamaan (2) menunjukkan hubungan antara momentum sudut
(L), momen inersia (I) dan kecepatan sudut (ω¿. Besaran I
disebut momen inersia benda tegar.
Untuk suatu benda tegar dengan distribusi massa yang
kontinu kita gunakan elemen massa ∆ m1 yang terjadi pada jarak
r1 dari sumbu putar, sehingga momen inersia benda menjadi
I=∑i=1
nr12∆m1(4)
Jika ∆ m1 sangat kecil, maka indeksi I menjadi kontinu dan
penjumlahannya menjadi integral
I=∫r2dxatauI=ρ∫x2dv
(5)
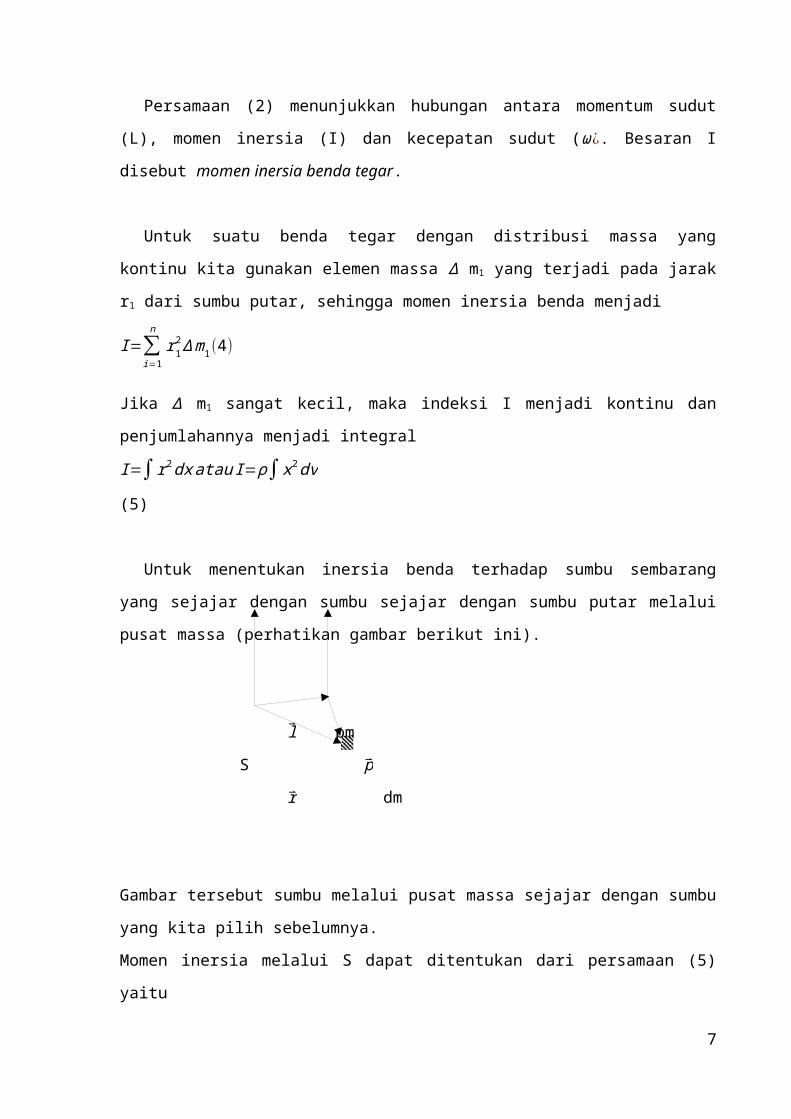
Untuk menentukan inersia benda terhadap sumbu sembarang
yang sejajar dengan sumbu sejajar dengan sumbu putar melalui
pusat massa (perhatikan gambar berikut ini).
l⃑ pm
S p⃑r⃑ dm
Gambar tersebut sumbu melalui pusat massa sejajar dengan sumbu
yang kita pilih sebelumnya.
Momen inersia melalui S dapat ditentukan dari persamaan (5)
yaitu
7
I=∫r2dm
Sehingga diperoleh
I=∫I2dm+∫p2dm+∫2Ixpxdm+∫2Iypydm
Inetegral pertama ∫I2dm=I2m, integral kedua ∫p2dm=Ipm,
integral ketiga dan keempat hasilnya nol, karena Ix yaitu
panjang proyeksi I terhadap sumbu x adalah tetap dan ∫px dan
adalah posisi pusat massa dihitung dari pusat massa dan
mempunyai nilai nol.
Akhirnya kita peroleh momen inersia adalah
I = M I2 + Ipm
(6)
Persamaan (6) yang kemudian oleh Stainer disebut sebagai dalil
sumbu sejajar.
Contoh soal (dibalas dalam tatap muka di kelas)
Sebuah pimpinan yang berputar pada sumbu tegak lurus
piringan melalui pusat massa dengan rapat massa yang konstan
(p). jika jejari piringan R dan M adalah massa piringan.
Tentukanlah.
a) Momen inersia piringan pada pusat massa
b) Momen inersia pada sisi piringan
3. MOMEN INERSIA UNTUK BEBERAPA BENTUK BENDA TEGAR
Batang. Sebuah batang dengan panjang L dan massa M berputar
pada suatu sumbu di tengah-tengah batang. Distribusi massa
8

pada batang kontinu dan kita anggap serba sama, jadi massa per
satuan panjang p, adalah konstan.
Menurut persamaan IV
I=∫x2dm(7)
kemudiankitaharusmenentukanhubunganantaramdanx1yaitudaridm=ρdx
dimana ρ adalah massa persatuan panjang. Jika distribusi massaadalah homogen, maka ρ adalah konstan, tidak berubah dengan x.persamaan (7) dapat ditulis sebagai
I= ∫x=−L/2
x=+L /2
x2ρdx=ρ ∫x=−L/2
x=+L /2
x2dx
¿13x
3ρ ∫x=−L/2
x=+L/2
ρ 13 [(L2 )3
−(12 )3]
¿112
L3ρ=112
(ρL)L2=112
ML2
Piringan. Sebagai contoh
kedua, marilah kita tentukan
momen inersia I dari sebuah
piringan yang berputar pada
sum tegal lurus piring
melalui pusat lingkaran.
Misalkan jejari piringan
adalah R dan massa pinringan
adalah M. massa piringan kita anggap serba sama. Perhatikan
gambar disamping kita akan pergunakan lagi persamaan
I=∫r2dm
9
Integral momen inersia menjadi
I=∬r2ρ (rdθ ) (dr )
¿ρ∬r3drdθ¿ρ∫0
R
r3dr∫0
2π
dθ(8)
¿ρ¿
¿12
(ρπR2)R2=12MR2
4. DINAMIKA BENDA TEGAR
Dalam membahas dinamika pada rotasi benda tegar, kita
mempunyai hubungan-hubungan berikut:
L = Iω, bila diturunkan terhadap waktudldt
=Idωdt
=σ=Iα
Persamaan diatas menyebabkan benda berputar, maka kerja
yang dilakukan jika benda bergerak dari sudut θ1 ke sudut θ2
adalah:
W=∫θ2
θ1σdθ
Dari prinsip kerja energy diperoleh
W=∆F4=12mv2
2−12mv12, dimana v = R ω
¿ 12m(Rω2)2−
12m(Rω1)
2
W=12Iω2
2−12Iω1
2
10

Besaran ½ I ω2 disebut energy kinetic rotasi suatu benda dan
persamaan diatas disebut hukum kekekalan momentum sudut.
Dari definisi kerja juga dapat dinyatakan besaran daya pada
gerak rotasi yaitu
W=F.ds, dimana ds = R dθ, makaW=F.Rdθ, F.R = σdωdt
=σ dθdt
, dθdt
=ω⃑
P = σ⃑ .ω⃑
Contoh :
Marilah kita bahas suatu
persoalan agar pengertian-
pengertian diatas menjadi lebih
jelas. Perhatikan gambar
disamping.
Sebuah piringan bermassa M = 5 kg, mempunyai jejari R = 50 cm,
berputar tanpa gesekan pada sumbu melalui pusat piringan.
Seutas tali ringan dililitkan pada pinggir piringan dan
ditarik dengan gaya T yang konstan. Misalkan besar gaya T
adalah 100 newton. Marilah kita hitung percepatan sudut yang
dihasilkan. Pertama kita hitung momen gaya.
τ=TR=(100N ) (0,5m)=50N-m
Momen inersia piringan adalah
I = ½ MR2 = ½ (5 kg)(0,5)2m2 = 0,625 kg-m2
Percepatan sudut α yang dihasilkan dapat dihitung dari
11
Τ=Iαatau∝=τI
= 500,625
=80rad /det2
Percepatan tangensial pada pinggir piringan adalah
AT = αR = (80 rad/det)(0,5 m) = 40 m/det2
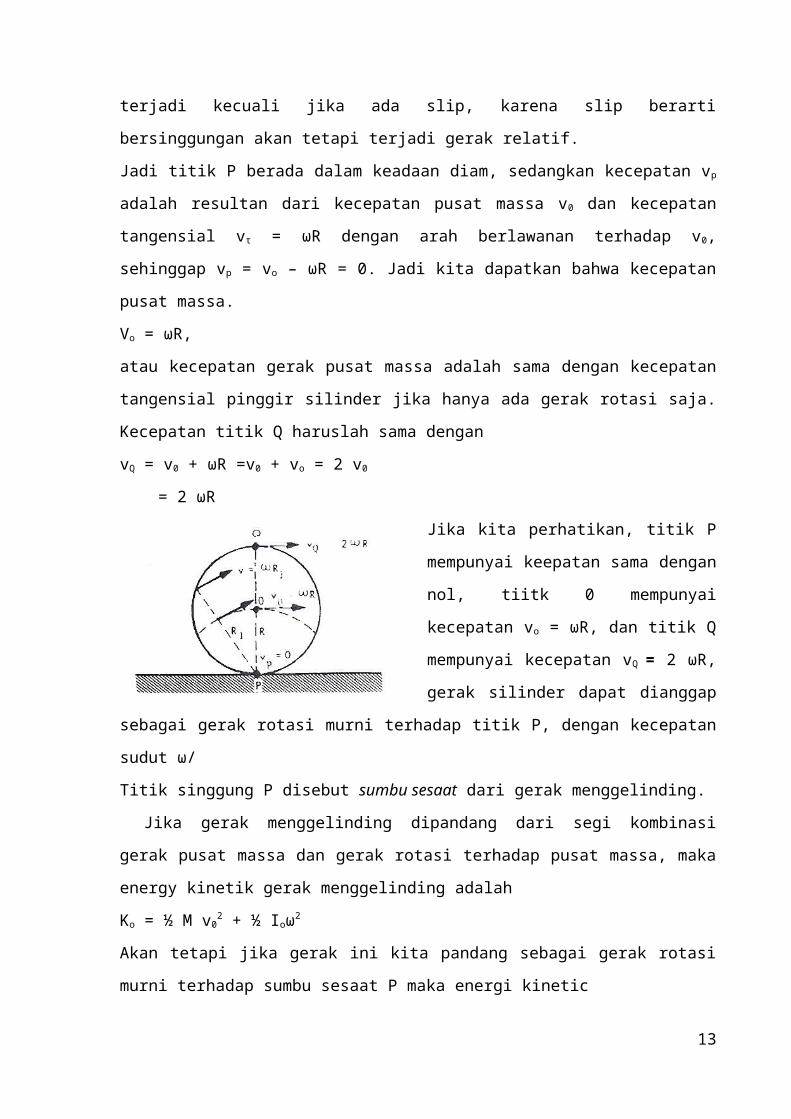
5. GERAK MENGGELINDING
Gerak menggelinding ini adalah suatu gerak yang sangat
penting, gerak roda dari alat transport yang bergerak adalah
gerak menggelinding. Pada gambar disamping dilukiskan sebuah
silinder yang bergerak menggelinding.
Setiap bagian dari silinder
melakukan dua gerakan
sekaligus. Satu gerak bersama
pusat massa, yaitu dengan
kecepatan v0, dan gerak lain
adalah gerak lingkar dengan
kecepatan sudut ω. Titik-titik P, O, dan Q pada gambardisamping, bukanlah titik yang dicatkan pada silinder, akan
tetapi menyatakan posisi pada silinder, jadi titik P
menyatakan titik singgung silinder dengan lantai, titik 0
adalah titik pusat massa, dan titik Q menyatakan bagian paling
atas dari silinder.
Jika silinder tidak menggelincir, atau tidak slip, maka
titik P haruslah mempunyai kecepatan nol terhadap tanah. Pada
titik P silinder bersinggungan dengan tanah dan pada saat itu
bagian silinder yang menyinggung tanah haruslah dalam keadaan
berhenti, karena tanah berada dalam keadaan berhenti. Hal ini12
terjadi kecuali jika ada slip, karena slip berarti
bersinggungan akan tetapi terjadi gerak relatif.
Jadi titik P berada dalam keadaan diam, sedangkan kecepatan vp
adalah resultan dari kecepatan pusat massa v0 dan kecepatan
tangensial vτ = ωR dengan arah berlawanan terhadap v0,
sehinggap vp = vo – ωR = 0. Jadi kita dapatkan bahwa kecepatan
pusat massa.
Vo = ωR,
atau kecepatan gerak pusat massa adalah sama dengan kecepatan
tangensial pinggir silinder jika hanya ada gerak rotasi saja.
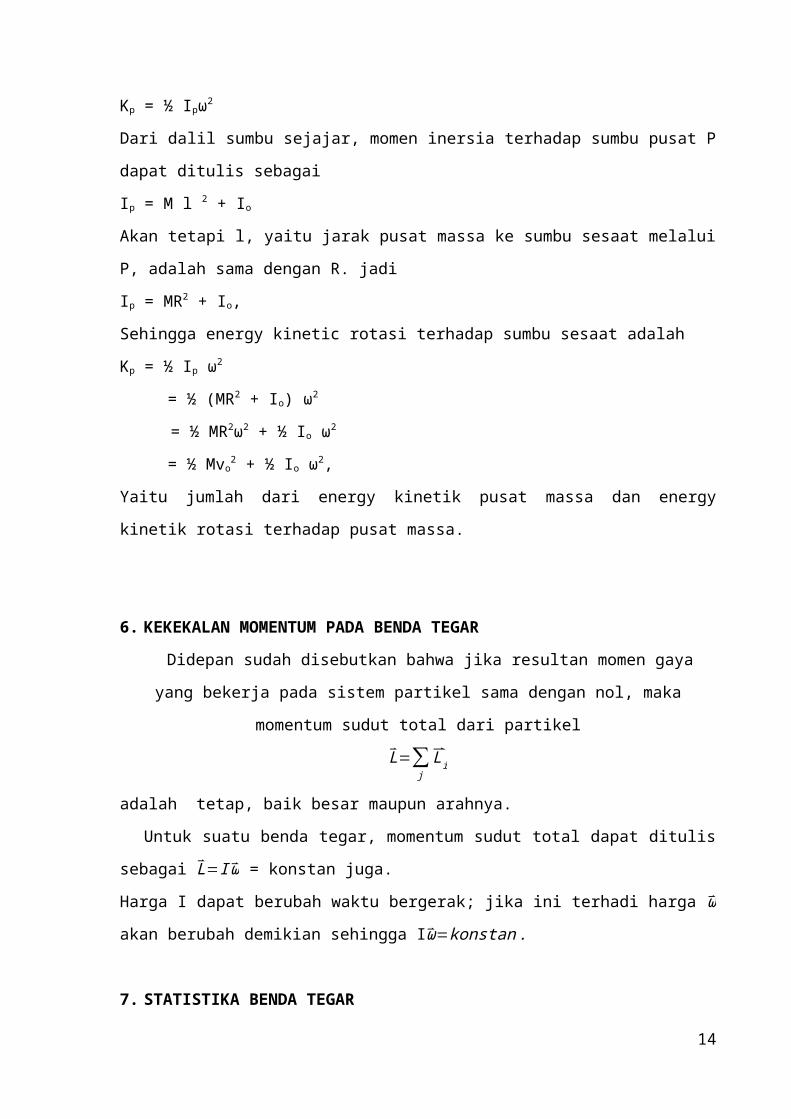
Kecepatan titik Q haruslah sama dengan
vQ = v0 + ωR =v0 + vo = 2 v0
= 2 ωR
Jika kita perhatikan, titik P
mempunyai keepatan sama dengan
nol, tiitk 0 mempunyai
kecepatan vo = ωR, dan titik Q
mempunyai kecepatan vQ = 2 ωR,
gerak silinder dapat dianggap
sebagai gerak rotasi murni terhadap titik P, dengan kecepatan
sudut ω/
Titik singgung P disebut sumbu sesaat dari gerak menggelinding.
Jika gerak menggelinding dipandang dari segi kombinasi
gerak pusat massa dan gerak rotasi terhadap pusat massa, maka
energy kinetik gerak menggelinding adalah
Ko = ½ M v02 + ½ Ioω2
Akan tetapi jika gerak ini kita pandang sebagai gerak rotasi
murni terhadap sumbu sesaat P maka energi kinetic
13
Kp = ½ Ipω2
Dari dalil sumbu sejajar, momen inersia terhadap sumbu pusat P
dapat ditulis sebagai
Ip = M l 2 + Io
Akan tetapi l, yaitu jarak pusat massa ke sumbu sesaat melalui
P, adalah sama dengan R. jadi
Ip = MR2 + Io,
Sehingga energy kinetic rotasi terhadap sumbu sesaat adalah
Kp = ½ Ip ω2
= ½ (MR2 + Io) ω2
= ½ MR2ω2 + ½ Io ω2
= ½ Mvo2 + ½ Io ω2,
Yaitu jumlah dari energy kinetik pusat massa dan energy
kinetik rotasi terhadap pusat massa.
6. KEKEKALAN MOMENTUM PADA BENDA TEGAR
Didepan sudah disebutkan bahwa jika resultan momen gaya
yang bekerja pada sistem partikel sama dengan nol, maka
momentum sudut total dari partikel
L⃑=∑jL⃑i
adalah tetap, baik besar maupun arahnya.
Untuk suatu benda tegar, momentum sudut total dapat ditulis
sebagai L⃑=Iω⃑ = konstan juga.Harga I dapat berubah waktu bergerak; jika ini terhadi harga ω⃑akan berubah demikian sehingga Iω⃑=konstan.
7. STATISTIKA BENDA TEGAR
14
Keseimbangan Mekanik
Gerak suatu partikel adalah suatu gerak translasi. Jika
sebuah partikel berada dalam keadaan diam atau bergerak dengan
kecepatan konstan, percepatannya sama dengan nol. Resultan
gaya-gaya yang bekerja pada partikel tersebut adalah sama
dengan nol, dan partikel tersebut dikatakan ada dalam keadaan
setimbang. Keadaan setimbang ini dikatakan bersifat static jika
partikel berada pada keadaan diam. Sabang mekanika yang
berhubungan dengan kesetimbangan static suatu partikel disebut
statika partikel.
Gerak suatu benda tegar adalah gerak rotasi dan translasi.
Jika sebuah benda tegar berada dalam keadaan diam atau
bergerak demikian rupa sehingga keecpatan linier dan kecepatan
sudutnya adalah konstan, maka percepatan linier dan percepatan
sudutnya sama dengan nol. Resultan dari semua gaya dan
resultan dari semua momen-momen gaya yang bekerja pada benda
tersebut adalah sama dengan nol, dan benda tegar tersebut
berada dalam keadaan setimbang mekanik. Kesetimbangan ini
dikatakan bersifat statik jika benda berada dalam keadaan
diam. Cabang mekanika yang berbuhungan dengan kesetimbangan
statik suatu benda tegar disebut statika benda tegar.
Statika adalah suatu hal yang sangat penting dalam teknik.
Prinsip-prinsipnya dipergunaka dalam konstruksi jembatan dan
bangunan-bangunan lain. Disini kita hanya memandang syarat-
syarat umum kesetimbangan mekanik dan secara singkat membahas
pemakaiannya untuk hal khusus pada benda tegar yang berada
dalam keadaan diam.
15
Syarat-syarat kesetimbangan mekanik pada benda tegar
Jika suatu benda tegar berada dalam keadaan setimbanga
translasi, maka percepatan linier dari pusat massa haruslah sama
dengan nol. Akan tetapi percepatan linier pusat massa
Apm = Fext/M
dengan M adalah massa benda tegar, dan Fext adalah resultan
dari semua gaya-gaya luar yang bekerja pada benda tersebut.
Jadi syarat pertama kesetimbangan adalah: jumlah vektor semua
gaya yang bekerja pada benda yang berada dalam keadaan setimbang adalah
sama dengan nol.
Syarat kesetimbangan ini dapat ditulis
F⃑=F⃑1+F⃑2+…=0
Persamaan vektor ini dapat ditulis sebagai tiga persamaan
skalar
Fx = F1x + F2x + … = 0
Fy = F1y + F2y + … = 0
Fz = F1z + F2z +… = 0
yang menyatakan bahwa jumlah dari komponen-komponen gaya pada
setiap sumbu x, y, z, adalah sama dengan nol.
Agar suatu benda tegar berada dalam keadaan setimbang rotasi,
percepatan sudutnya haruslah sama dengan nol. telah kita lihat
bahwa
τ⃑ext=Iα⃑,
sehingga syarat kedua dari kesetimbangan adalah : jumlah vektor
semua momen gaya yang bekerja pada sebuah benda dalam keadaan setimbang
adalah sama dengan nol.
syarat kedua dapat ditulis.
16
Syarat kedua dapat ditulis
τ⃑=τ⃑1x+τ⃑2+….=0
atau dalam bentuk scalar kita mempunyai tiga persamaan
τx = τ1x + τ2x + … = 0
τy = τ1y + τ2y + … = 0
τz = τ1z + τ2z + … = 0
Jika sebuah benda berada dalam keadaan setimbang, benda ini
tidak boleh mempunyai percepatan sudut tehadap setiap sumbu.
Dari semua sumbu yang dapat dibuat melalui sebuah benda, kita
cukup membahas tiga buah sumbu yang saling tegak lurus.
Akibatnya kita mempunyai enam buah syarat untuk gaya-gaya yang
bekerja agar berada dalam keadaan setimbang. Seringkali
persoalan kita terbatas pada gaya-gaya dalam suatu bidang
datar. Maka kita hanya mempunyai tiga syarat untuk gaya-gaya
pada benda. Dalam buku ini kita hanya membalas statika dalam
dua dimensi untuk mempermudah persoalan.
Titik Berat
Satu dari gaya-gaya yang dijumpai pada gerak benda tegar
adalah gaya gravitasi. Sebetulnya gaya ini bukanlah tediri
dari satu gaya,akan tetapi adalah suatu resultan dari gaya-
gaya yang banyak.
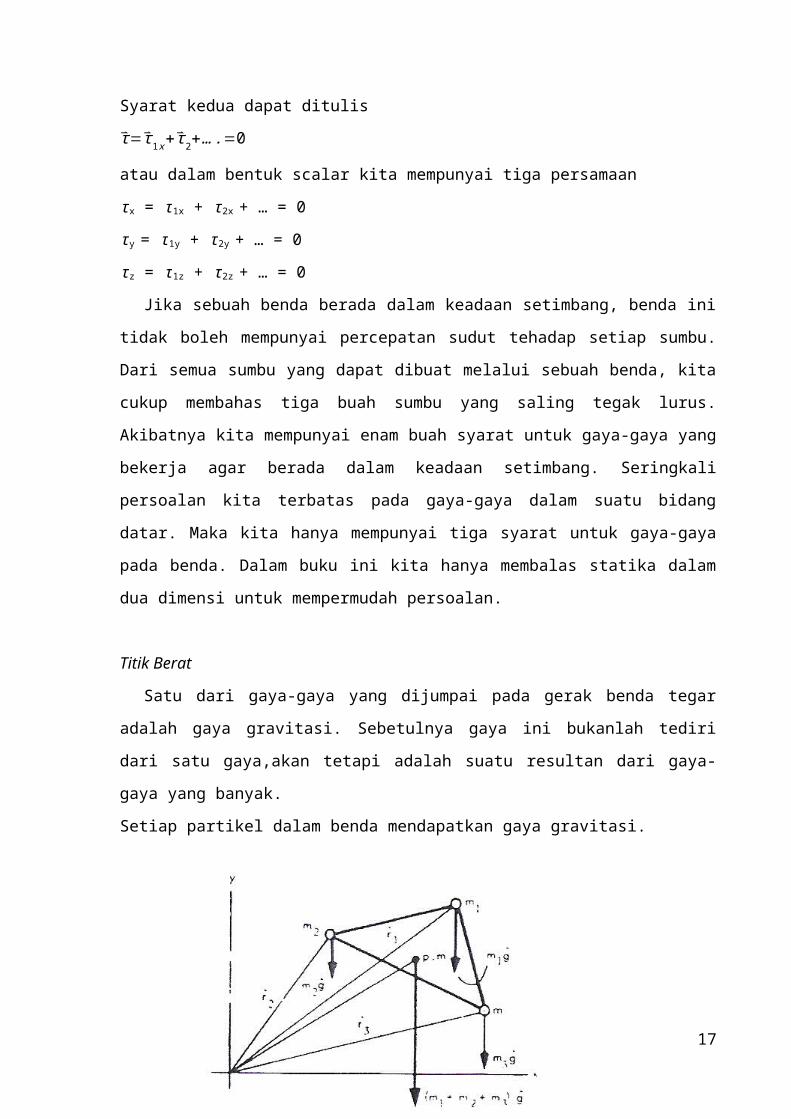
Setiap partikel dalam benda mendapatkan gaya gravitasi.
17
Marilah kita pandang suatu benda tegar yang tediri dari tiga
partikel, seperti ditunjukkan pada.
Jika medan gravitasi dapat dianggap konstan, yaitu g⃑, makagaya berat pada masing-masing adalah sejajar, yaitu arah
vertikal ke bawah. Akibatnya momen gaya resultan terhadap
suatu tiitk asal 0 dapat ditulis sebagai
τ⃑ = r⃑1 x m1g⃑ + r⃑2 x m2 g⃑ + r⃑3 x m3g⃑ = (r⃑1m1 + r⃑2m2 + r⃑3m3) x g⃑Akan tetapi vektor posisi pusat massa adalah
r⃑pm=m1r⃑1+m2r⃑2+m3 r⃑3
M ,
Sehingga persamaan diatas dapat ditulis sebagai
τ⃑ = r⃑pm x M g⃑Jadi resultan momen gaya berat dari benda tegar terhadap suatu
titik adalah sama dengan momen gaya yang terjadi jika berat
benda terkumpul pada titik pusat massa.
Hal yang sama berlaku untuk suatu benda tegar dengan
distribusi massa yang kontinu.
Jadi kita dapat menggantikan gaya-gaya gravitasi yang
bekerja pada partikel-partikel bermassa dalam benda tegar
dengan dengan suatu gaya tunggal M g⃑ sama dengan berat totaldari benda, dan bekerja pada pusat massa. Titik tangkap gaya
resultan gravitasi disebut titik berat.
18

Dalam hal medan gravitasi dapat dianggap konstan, maka
titik berat akan berhimpit dengan titik pusat massa.
19