electrical and electronics engineering
TRANSCRIPT
109
Signature of the Chairman BOS EEE
ELECTRICAL
AND
ELECTRONICS
ENGINEERING
110
Signature of the Chairman BOS EEE
111
Signature of the Chairman BOS EEE
M.E. EMBEDDED
SYSTEM
112
Signature of the Chairman BOS EEE
DEPARTMENT OF ELECTRICAL AND ELECTRONICS
ENGINEERING
VISION
The Vision of the Department is to be a Centre of Excellence in
Globalizing Power Engineering and Technology.
MISSION
The mission of the department is to Empower Youth by Imparting
Technical Knowledge and Skills to Innovate, Transform and Globalize the
Power Sector. It intended to equip the graduates with deftness to overcome
challenges culminating in success in diverse competitive careers with
societal impacts and values.
113
Signature of the Chairman BOS EEE
KUMARAGURU COLLEGE OF TECHNOLOGY
(An Autonomous Institution Affiliated to Anna University Chennai)
COIMBATORE – 641 049
REGULATIONS 2014(Revised 2015)
ME EMBEDDED SYSTEM TECHNOLOGIES
CURRICULUM
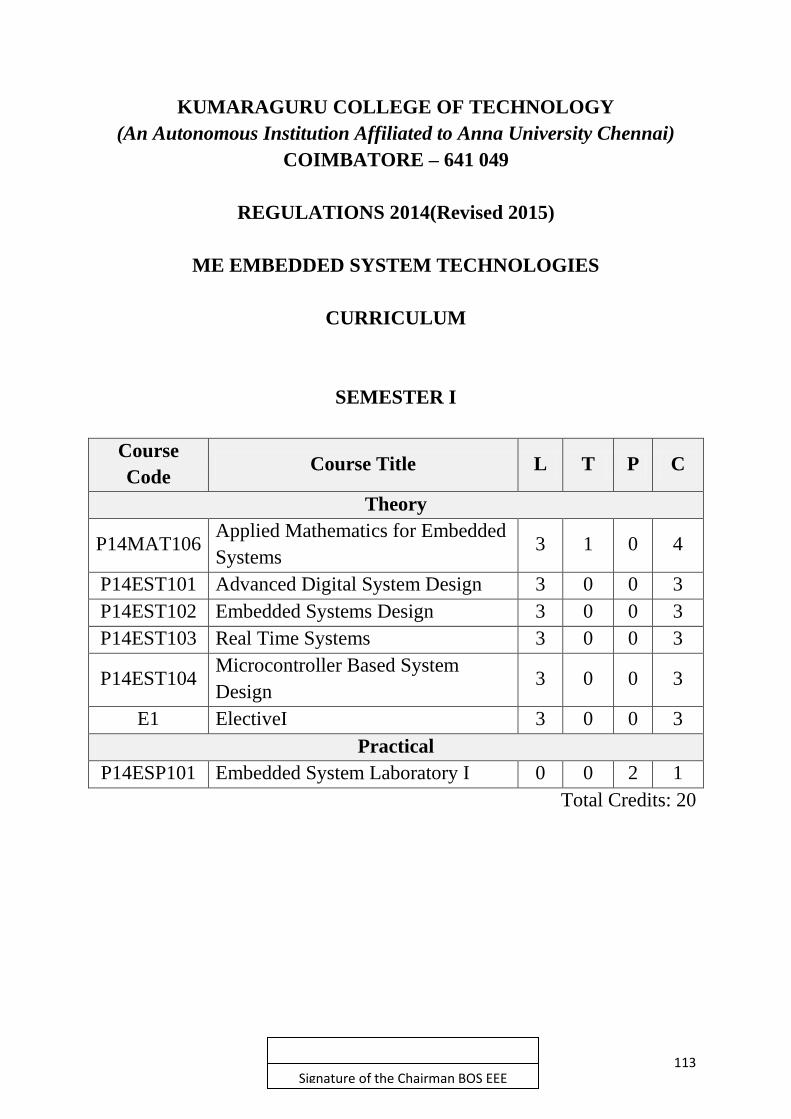
SEMESTER I
Course
Code Course Title L T P C
Theory
P14MAT106 Applied Mathematics for Embedded
Systems 3 1 0 4
P14EST101 Advanced Digital System Design 3 0 0 3
P14EST102 Embedded Systems Design 3 0 0 3
P14EST103 Real Time Systems 3 0 0 3
P14EST104 Microcontroller Based System
Design 3 0 0 3
E1 ElectiveI 3 0 0 3
Practical
P14ESP101 Embedded System Laboratory I 0 0 2 1
Total Credits: 20
114
Signature of the Chairman BOS EEE
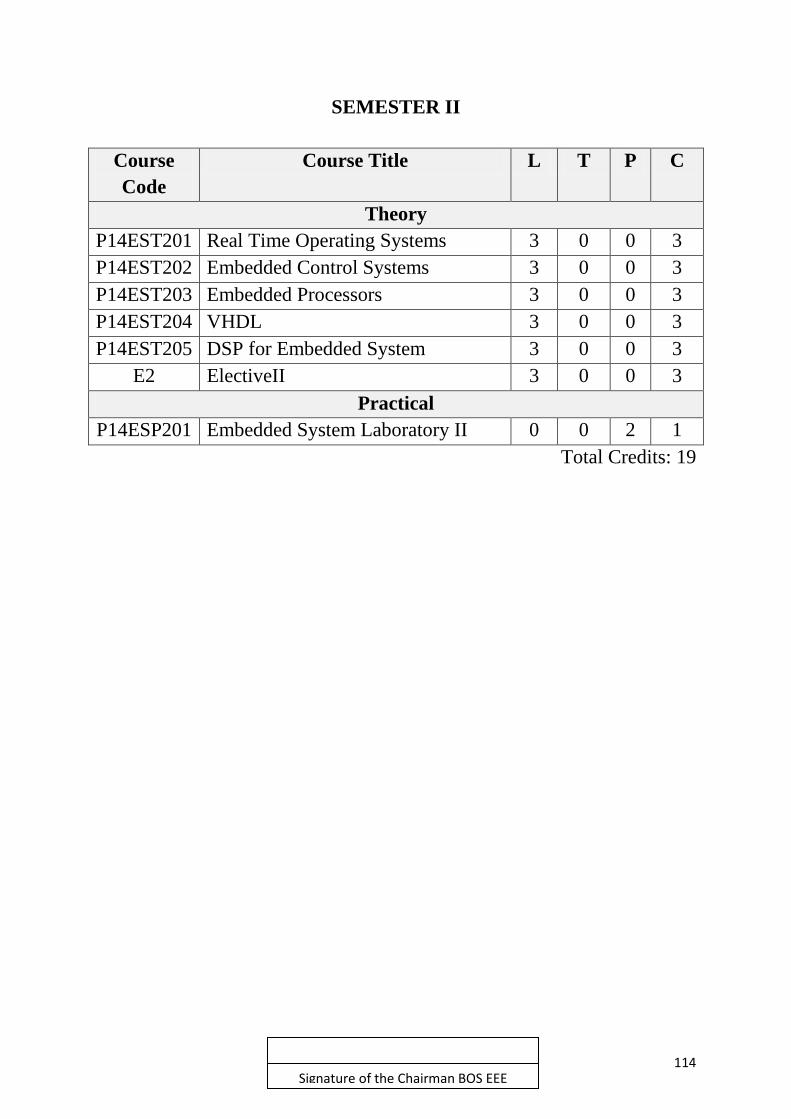
SEMESTER II
Course
Code
Course Title L T P C
Theory
P14EST201 Real Time Operating Systems 3 0 0 3
P14EST202 Embedded Control Systems 3 0 0 3
P14EST203 Embedded Processors 3 0 0 3
P14EST204 VHDL 3 0 0 3
P14EST205 DSP for Embedded System 3 0 0 3
E2 ElectiveII 3 0 0 3
Practical
P14ESP201 Embedded System Laboratory II 0 0 2 1
Total Credits: 19
115
Signature of the Chairman BOS EEE
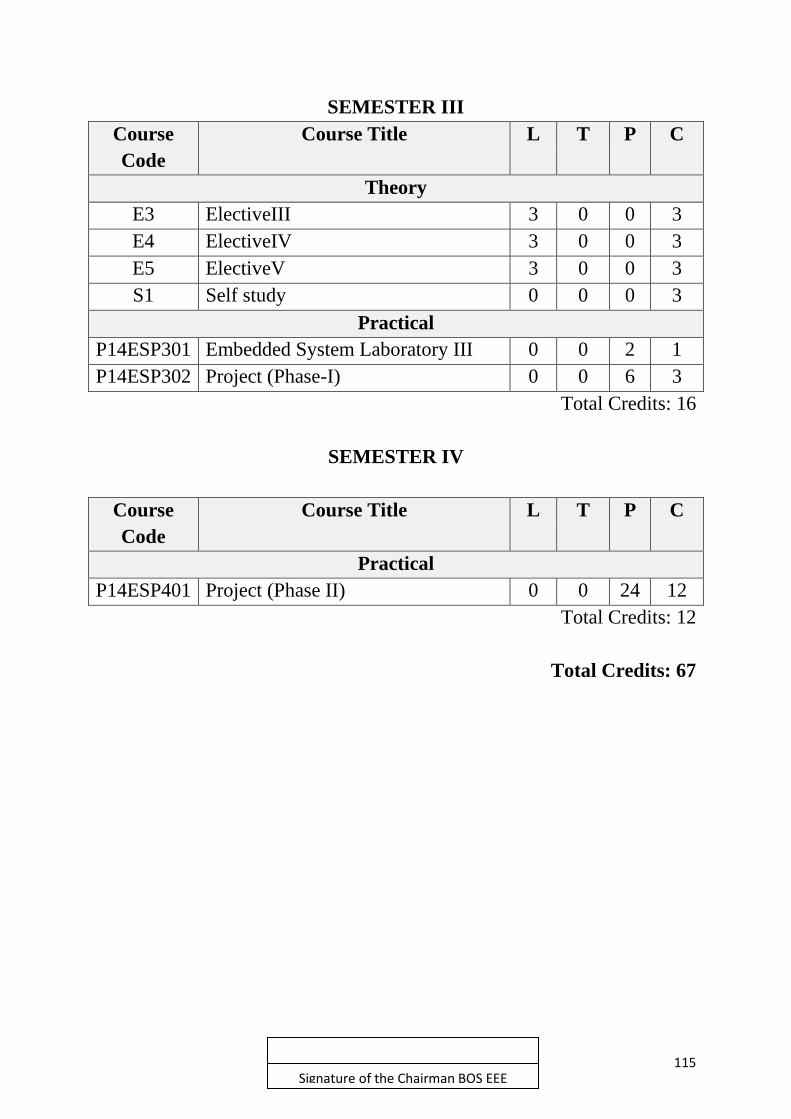
SEMESTER III
Course
Code
Course Title L T P C
Theory
E3 ElectiveIII 3 0 0 3
E4 ElectiveIV 3 0 0 3
E5 ElectiveV 3 0 0 3
S1 Self study 0 0 0 3
Practical
P14ESP301 Embedded System Laboratory III 0 0 2 1
P14ESP302 Project (Phase-I) 0 0 6 3
Total Credits: 16
SEMESTER IV
Course
Code
Course Title L T P C
Practical
P14ESP401 Project (Phase II) 0 0 24 12
Total Credits: 12
Total Credits: 67
116
Signature of the Chairman BOS EEE
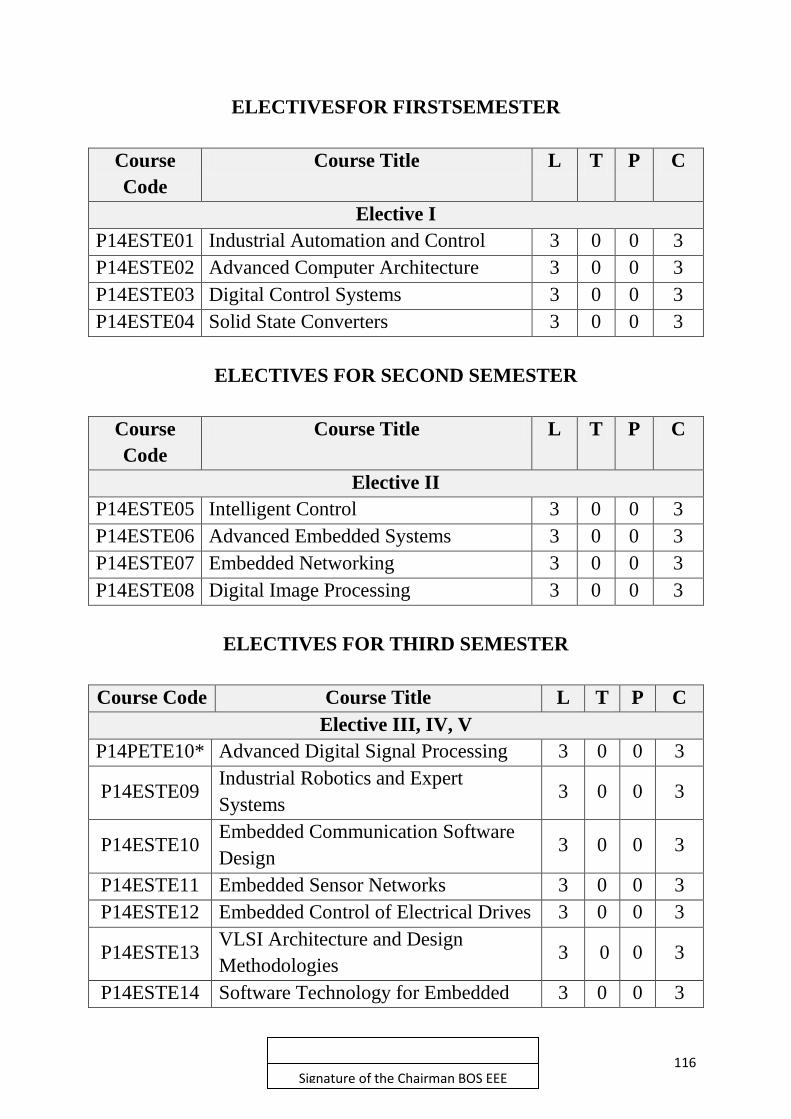
ELECTIVESFOR FIRSTSEMESTER
Course
Code
Course Title L T P C
Elective I
P14ESTE01 Industrial Automation and Control 3 0 0 3
P14ESTE02 Advanced Computer Architecture 3 0 0 3
P14ESTE03 Digital Control Systems 3 0 0 3
P14ESTE04 Solid State Converters 3 0 0 3
ELECTIVES FOR SECOND SEMESTER
Course
Code
Course Title L T P C
Elective II
P14ESTE05 Intelligent Control 3 0 0 3
P14ESTE06 Advanced Embedded Systems 3 0 0 3
P14ESTE07 Embedded Networking 3 0 0 3
P14ESTE08 Digital Image Processing 3 0 0 3
ELECTIVES FOR THIRD SEMESTER
Course Code Course Title L T P C
Elective III, IV, V
P14PETE10* Advanced Digital Signal Processing 3 0 0 3
P14ESTE09 Industrial Robotics and Expert
Systems 3 0 0 3
P14ESTE10 Embedded Communication Software
Design 3 0 0 3
P14ESTE11 Embedded Sensor Networks 3 0 0 3
P14ESTE12 Embedded Control of Electrical Drives 3 0 0 3
P14ESTE13 VLSI Architecture and Design
Methodologies 3 0 0 3
P14ESTE14 Software Technology for Embedded 3 0 0 3
117
Signature of the Chairman BOS EEE
Systems
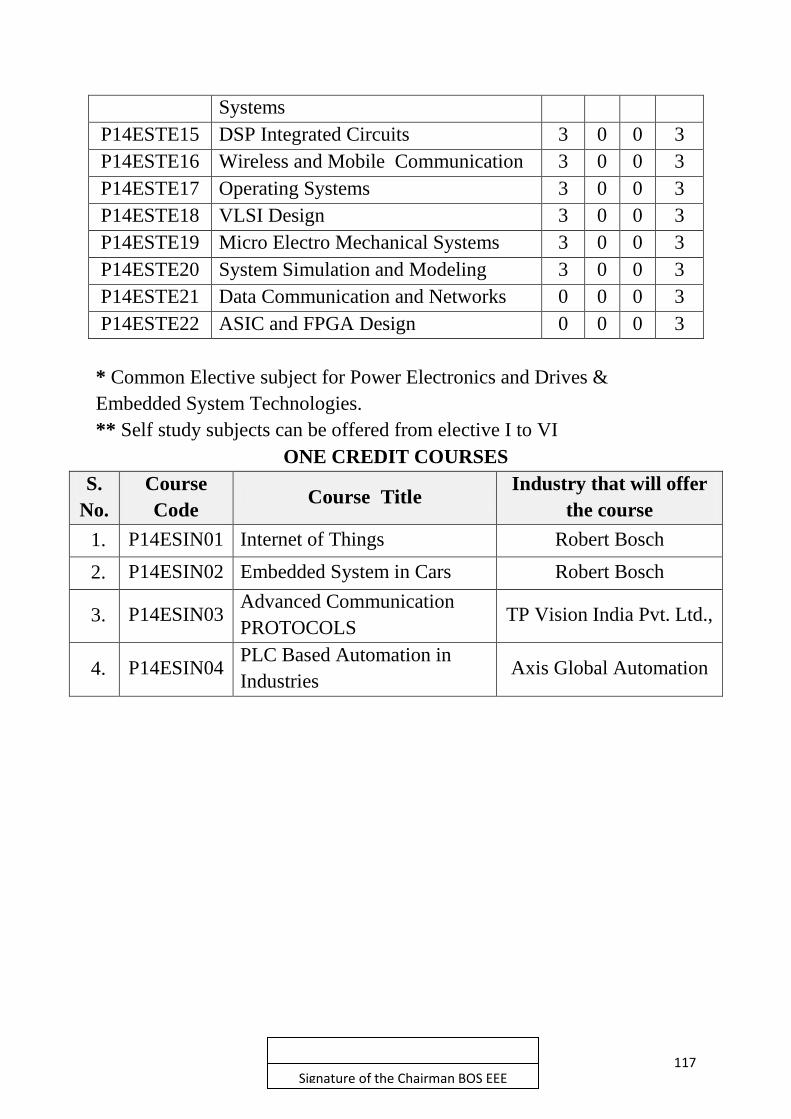
P14ESTE15 DSP Integrated Circuits 3 0 0 3
P14ESTE16 Wireless and Mobile Communication 3 0 0 3
P14ESTE17 Operating Systems 3 0 0 3
P14ESTE18 VLSI Design 3 0 0 3
P14ESTE19 Micro Electro Mechanical Systems 3 0 0 3
P14ESTE20 System Simulation and Modeling 3 0 0 3
P14ESTE21 Data Communication and Networks 0 0 0 3
P14ESTE22 ASIC and FPGA Design 0 0 0 3
* Common Elective subject for Power Electronics and Drives &
Embedded System Technologies.
** Self study subjects can be offered from elective I to VI
ONE CREDIT COURSES
S.
No.
Course
Code Course Title
Industry that will offer
the course
1. P14ESIN01 Internet of Things Robert Bosch
2. P14ESIN02 Embedded System in Cars Robert Bosch
3. P14ESIN03 Advanced Communication
PROTOCOLS TP Vision India Pvt. Ltd.,
4. P14ESIN04 PLC Based Automation in
Industries Axis Global Automation
118
Signature of the Chairman BOS EEE
SEMESTER I
119
Signature of the Chairman BOS EEE
P14MAT106 APPLIED MATHEMATICS FOR
EMBEDDED SYSTEMS
L T P C
3 1 0 4
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Apply the Laplace transform to solve initial and boundary value
problems.
CO2:Understand the series solution and its role in Bessel Functions and
Legendre Polynomials.
CO3:Know the basic concepts and differences between Discrete Fourier
transform and Z- transform.
CO4: Construct probabilistic models for observed phenomena through
distributions which play an important role in many engineering
applications.
CO5: Choose a class of models in which customers arrive in some random
manner at a service facility.
PRE-REQUISITE
1. NIL
THE WAVE EQUATION 9+3Hours
Solution of initial and boundary value problems – Characteristics –
D’Alembert’s Solution – Significance of Characteristic curves – Laplace
transform solutions for displacement in a long string – a long string under
its weight – a bar with prescribed force on one end – free vibration of a
string.
SPECIAL FUNCTIONS 9+3Hours
Series solutions – Bessel’s equation – Bessel Functions – Legendre’s
equation – Legendre Polynomials – Rodrigue’s formula – Recurrence
relations – Generating Functions and orthogonal property for Bessel
functions of the first kind – Legendre Polynomials.
FOURIER ANALYSIS AND Z –TRANSFORMS 9+3Hours
Discrete Fourier Transforms and its properties – Fourier series and its
120
Signature of the Chairman BOS EEE
properties – Fourier representation of finite duration sequences – Z-
transform – Properties of the region of convergence – Inverse Z-transform
– Z-transform properties.
PROBABILITY AND RANDOM VARIABLES 9+3Hours
Probability – Random variables – Binomial, Poisson, Geometric, Uniform,
Normal, Exponential distributions – Moment generating functions and
their properties – Functions of Random variables.
QUEUING THEORY 9+3Hours
Queuing characteristics, single server and parallel server models:
(M / M / 1): / ,FIFO (M / M / k): / ,FIFO (M / M / 1): / ,N FIFO (M /
M / k): /N FIFO M/G/1 queuing system – P-K formula.
Theory:45 HrsTutorial: 15 HrsTotal: 60 Hrs
REFERENCES
1. Andrews L.C., and Shivamoggi, ―B.K. Integral Transforms for
Engineers‖, Prentice Hall of India Pvt. Ltd, New Delhi, 2003.
2. Gupta, S.C and Kapoor V.K., ―Fundamentals of Mathematical
Statistics‖, Sultan Chand and sons, New Delhi, 2001.
3. Taha HA, ―Operations Research: An Introduction‖, Pearson Education
Edition, Asia, New Delhi, Seventh Edition 2002.
4. O’Neil P.V., ―Advanced Engineering Mathematics‖, Thomson
Brooks/Cole, Singapore, 5th Edition, 2003.
5. Andrews L.C., ―Special Functions of Mathematics for Engineers‖,
McGraw Hill, Inc., Singapore, 2nd
Edition, 1992.
121
Signature of the Chairman BOS EEE
P14EST101 ADVANCED DIGITAL SYSTEM
DESIGN
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Analyze and design the Clocked synchronous sequential circuits and
asynchronous sequential circuits for a digital circuit.
CO2: To study about different types of faults and testability algorithms.
CO3: To explain about features of VHDL language and design a digital
system using VHDL.
PRE-REQUISITE
1. Digital System Design
SEQUENTIAL CIRCUIT DESIGN 9 Hours
Analysis of Clocked Synchronous Sequential Networks (CSSN) Modeling
of CSSN – State Stable Assignment and Reduction – Design of CSSN –
Design of Iterative Circuits – ASM Chart – ASM Realization.
ASYNCHRONOUS SEQUENTIAL CIRCUIT DESIGN 9 Hours
Analysis of Asynchronous Sequential Circuit (ASC) – Flow Table
Reduction – Races in ASC – State Assignment – Problem and the
Transition Table – Design of ASC – Static and Dynamic Hazards –
Essential Hazards – Data Synchronizers – Designing Vending Machine
Controller – Mixed Operating Mode Asynchronous Circuits.
FAULT DIAGNOSIS AND TESTABILITY
ALGORITHMS
9 Hours
Fault Table Method – Path Sensitization Method – Boolean Difference
Method – Kohavi Algorithm – Tolerance Techniques – The Compact
Algorithm – Practical PLA’s – Fault in PLA – Test Generation – Masking
Cycle – DFT Schemes – Built-in Self Test.
SYNCHRONOUS DESIGN USING PROGRAMMABLE
DEVICES
9 Hours
EPROM to Realize a Sequential Circuit – Programmable Logic Devices –
122
Signature of the Chairman BOS EEE
Designing a Synchronous Sequential Circuit using a GAL – EPROM –
Realization State machine using PLD – FPGA – Xilinx FPGA – Xilinx
2000 - Xilinx 3000.
SYSTEM DESIGN USING VHDL 9 Hours
VHDL Description of Combinational Circuits – Arrays – VHDL Operators
– Compilation and Simulation of VHDL Code – Modeling using VHDL –
Flip Flops – Registers – Counters – Sequential Machine – Combinational
Logic Circuits - VHDL Code for – Serial Adder, Binary Multiplier –
Binary Divider – complete Sequential Systems – Design of a Simple
Microprocessor.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1. Donald G. Givone, ―Digital principles and Design‖, 1st Edition, Tata
McGraw Hill, 2012.
2. Charles H. Roth Jr., ―Digital System Design using VHDL‖, 2nd
Edition, Cengage Learning, 2007.
3. Navabi.Z, ―VHDL Analysis and Modeling of Digital Systems‖,
McGraw International, 1992.
4. Parag K Lala, ―Digital System design using PLD‖ 1stEdition BS
Publications, 2003.
5. Skahill. K, ―VHDL for Programmable Logic‖ Pearson Education,
1996.
6. Robert K Dueck, ―Digital Design with CPLD applications and
VHDL‖, Thomson Asia, 2004.
123
Signature of the Chairman BOS EEE
P14EST102 EMBEDDED SYSTEMS DESIGN L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Outline the basic concepts of embedded system.
CO2:Acquire the knowledge of PIC controller and its computing
platform.
CO3: Describe and distinguish various software development tools.
PRE-REQUISITE
1. Embedded Processors
EMBEDDED SYSTEM DESIGN 9 Hours
Embedded systems descriptions & definitions – Challenges - Embedded
system design considerations and requirements, processor selection and
tradeoffs - Overview of board development process – Configurable /
Reconfigurable Embedded Systems - Hardware /Software co verification-
Microprocessor/ Microcontroller.
DESIGN USING PIC MICROCONTROLLER 9 Hours
CPU Architecture and instruction set – Program and Data memory – CPU
registers – IO port expansion – External Interrupts and Timers – RB0/INT
– Timer0 – Compare and Capture mode – Timer 1 – PWM outputs – I2C
operation – ADC – UART.
EMBEDDED COMPUTING PLATFORM 9 Hours
CPU bus- Memory devices- I/O devices- Component interfacing-
Designing with Microprocessors- Development and Debugging- Design
example- Design patterns- Dataflow graphs- Assembly and Linking- Basic
compilation techniques- Analysis and Optimization.
DISTRIBUTED EMBEDDED SYSTEM DESIGN 9 Hours
Inter-process communication- Signals – Shared memory Communication-
Accelerated design- Design for video accelerator- Networks for embedded
systems- Networks based design- Internet enabled systems - Embedded
124
Signature of the Chairman BOS EEE
Design methodologies and tools – design flows – designing hardware and
software components - requirement analysis and specification.
SOFTWARE DEVELOPMENT AND TOOLS 9 Hours
Embedded system evolution trends - Round Robin, robin with Interrupts,
function-One-Scheduling Architecture, Algorithms-Introduction to-
assembler-compiler-cross compilers and Integrated Development
Environment (IDE)-Object Oriented Interfacing, Recursion, Debugging
strategies, Simulators-Logic Analyzers - ICD and ICE. (MPLAB IDE
Programming).
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1. Raymond J.A.Bhur and Donald L.Bialey, ―An Introduction to Real
Time Systems: From Design to Networking with C/C++‖, Prentice
Hall, 1999, New Jersey.
2. Wayne Wolf, ―Computers as Components: Principles of Embedded
Computing System Design‖, Morgan Kaufman Publishers, 2008.
3. David E Simon, ―An Embedded Software Primer ", Pearson
Education Asia, 2001
4. John B. Peatman, ―Design with PIC microcontrollers‖, Pearson
Education, 1998, Singapore.
5. Tim Wilmshurst,―Designing Embedded Systems with PIC
Microcontrollers: Principles and Applications‖, Newnes Publisher,
2010.
125
Signature of the Chairman BOS EEE
P14EST103 REAL TIME SYSTEMS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Summarize the basics and importance of real-time systems.
CO2:List the use of multi-task scheduling algorithms in real-time systems
and task, Databasesscheduling.
CO3: Outline the features and structures of practical implementations of
Network Topologies and ability to solve the real-time systems
problems.
PRE-REQUISITE
1. Real Time Operating Systems
2. Operating Systems
REAL TIME SYSTEMS 9 Hours
Introduction – Issues in Real Time Computing, Structure of a Real Time
System, Task classes, Performance Measures for Real Time Systems,
Estimating Program Run Times. Task Assignment and Scheduling –
Classical uniprocessor scheduling algorithms, Uniprocessor scheduling of
IRIS tasks, Task assignment, Mode changes, and Fault Tolerant
Scheduling.
PROGRAMMING LANGUAGES AND TOOLS 9 Hours
Programming Languages and Tools – Desired language characteristics,
Data typing, Control structures, Facilitating Hierarchical Decomposition,
Packages, Run – time (Exception) Error handling, Overloading and
Generics, Multitasking, Low levelprogramming, Task Scheduling, Timing
Specifications, Programming Environments, Run – time support.
REAL TIME DATABASES 9 Hours
Real time Databases – Basic Definition, Real time Vs General Purpose
Databases, Main Memory Databases, Transaction priorities, Transaction
Aborts, Concurrency control issues, Disk Scheduling Algorithms, Two –
phase Approach to improve Predictability, Maintaining Serialization
126
Signature of the Chairman BOS EEE
Consistency, Databases for Hard Real Time Systems.
COMMUNICATION 9 Hours
Real Time Communication – Communications media, Network
Topologies Protocols, Fault Tolerant Routing. Fault Tolerance Techniques
– Fault Types, Fault Detection. Fault Error containment Redundancy, Data
Diversity, Reversal Checks, Integrated Failure handling.
EVALUATION TECHNIQUES 9 Hours
Reliability Evaluation Techniques – Obtaining parameter values,
Reliability models for Hardware Redundancy, Software error models.
Clock Synchronization – Clock, A Nonfault – Tolerant Synchronization
Algorithm, Impact of faults, Fault Tolerant Synchronization in Hardware,
Fault Tolerant Synchronization in software.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1. C.M. Krishna, Kang G. Shin, ―Real – Time Systems‖, McGraw Hill,
2005.
2. Stuart Bennett, ―Real Time Computer Control – An Introduction‖,
Prentice Hall of India, 2000.
3. Peter D.Lawrence, ―Real Time Micro Computer System Design – An
Introduction‖, McGraw Hill, 1988.
4. S.T. Allworth and R.N.Zobel, ―Introduction to real time software
design‖, 2nd
Edition, Macmillan,2005.
5. R.J.A Buhur, D.L Bailey, ―An Introduction to Real – Time Systems‖,
Prentice Hall of India, 2002.
127
Signature of the Chairman BOS EEE
P14EST104 MICROCONTROLLER BASED
SYSTEM DESIGN
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Describe the Architecture, Instruction sets and peripherals of the
8051 and PIC Microcontroller.
CO2: Write programs for 8051 and PIC Microcontroller to interfacing the
peripheral devices.
CO3: Design an Embedded system.
PRE-REQUISITE
1. Microprocessors and Architecture
8051 ARCHITECTURE 9 Hours
Architecture – memory organization – addressing modes – instruction set
– Timers - Interrupts - I/O ports, Interfacing I/O Devices – Serial
Communication.
8051 PROGRAMMING 9 Hours
Assembly language programming – Arithmetic Instructions – Logical
Instructions –Single bit Instructions – Timer Counter Programming –
Serial Communication Programming Interrupt Programming – RTOS for
8051 – RTOS Lite – Full RTOS –Task creation and run – LCD digital
clock/thermometer using Full RTOS.
PIC MICROCONTROLLER 9 Hours
Architecture – memory organization – addressing modes – instruction set
– PIC programming in Assembly & C –I/O port, Data Conversion, RAM
& ROM Allocation, Timer programming, MP-LAB.
PERIPHERAL OF PIC MICROCONTROLLER 9 Hours
Timers – Interrupts, I/O ports- I2C bus-A/D converter-UART- CCP
modules -ADC, DAC and Sensor Interfacing –Flash and EEPROM
memories.
128
Signature of the Chairman BOS EEE
SYSTEM DESIGN – CASE STUDY 9 Hours
Interfacing LCD Display – Keypad Interfacing - Generation of Gate
signals for converters and Inverters - Motor Control – Controlling AC
appliances –Measurement of frequency - Stand alone Data Acquisition
System.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1 Muhammad Ali Mazidi, Rolin D. Mckinlay, Danny Causey, ―PIC
Microcontroller and Embedded Systems using Assembly and C
for PIC18‖, Pearson Education, 2008.
2 John Iovine, ―PIC Microcontroller Project Book‖, McGraw Hill,
2004.
3 MykePredko, ―Programming and customizing the 8051
microcontroller‖, TataMcGraw Hill 2001.
4 Michael Slater, ―Microprocessor based designs a comprehensive
guide to effective Hardware design‖ Prentice Hall, 1989, New
Jersey.
5 Ayala, Kenneth, ―The 8051 Microcontroller‖ Delmar Cengage
Learning, 2004.
129
Signature of the Chairman BOS EEE
P14ESP101 EMBEDDED SYSTEM LABORATORY I L T P C
0 0 4 2
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Write Input output interfacing programs for 8051 and PIC
Microcontrollers.
CO2: Write Interrupt / Timer programs for 8051 and PIC
Microcontrollers.
CO3: Design an embedded system by interfacing peripherals like ADC,
LCD, Keypad, Switches, timer and counter applications.
PRE-REQUISITE
1. Embedded Processors
LIST OF EXPERIMENTS:
8051 Microcontroller
IO Programming
1. Read data from port P2 and P3. Add data and display result on port
P0. Glow LED connected at port pinP1.1 if carry flag set after
addition.
2. Read data from port P2 and P3. Multiply data and display result on
port P0 and P1.
3. Write program to read switch connected at port pin P1.0, toggle it
and send to port pin P1.1.
4. Write a program to generate square wave of 50% duty cycle having
frequency 5 KHz at port pin P1.0 using timer 1 in mode 2. Modify
program to generate pulse waveform of 70% duty cycle using timer
on the same pin.
Interrupts and Timer application
1. Generate external interrupt INT0 and INT1 by connecting push
button switch. Glow LEDs connected at port 1 one by one when
interrupt INT0 occurs. LEDs should flash when interrupt INT1
occurs.
130
Signature of the Chairman BOS EEE
Interfacing Experiments
1. Interface LCD with the microcontroller. Display your name on the
LCD.
2. Interface ADC0808 with 89C51 microcontroller. Write program to
read analog voltage applied at the input of ADC. Display it on LCD.
PIC Microcontroller
IO Programming
1. Introduction to Software Tools MPLAB, PROTEUS, and QL-2006
programmer.
2. Delay Loops Applications Flasher & Counter.
Interrupts and Timer application
1. TMR0 Application Counter Using TMR0.
2. Interrupt Application Controlling flashing speed of a flasher.
3. EEPROM Memory Application.
Interfacing Experiments
1. Application for Keypad and LCD.
2. Analog Digital Conversion.
3. Pulse-width modulation (PWM).
Experiments beyond the syllabus should be conducted.
Practical:45 Hrs Total: 45 Hrs
131
Signature of the Chairman BOS EEE
SEMSTER II
132
Signature of the Chairman BOS EEE
P14EST201 REAL TIME OPERATING SYSTEMS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Familiarity with key Real-Time Operating System terms and
concepts.
CO2:Comprehend and ability to use tools to build an embedded real-time
system.
CO3: Ability to specify, design and implement a small embedded system.
PRE-REQUISITE
1. Real Time Systems
REVIEW OF OPERATING SYSTEMS 9 Hours
Basic Principles – System Calls – Files – Processes – Design and
Implementation of processes – Communication between processes –
Operating System structures.
DISTRIBUTED OPERATING SYSTEMS 9 Hours
Topology – Network types – Communication – RPC – Client server model
– Distributed file system – Design strategies.
REAL TIME MODELS AND LANGUAGES 9 Hours
Event Based – Process Based and Graph based Models – Petrinet Models
– Real Time Languages – RTOS Tasks – RT scheduling - Interrupt
processing – Synchronization – Control Blocks – Memory Requirements.
REAL TIME KERNEL 9 Hours
Principles – Design issues – Polled Loop Systems – RTOS Porting to a
Target – Comparison and study of various RTOS like QNX – VX works –
PSOS – C Executive – Case studies.
RTOS APPLICATION DOMAINS 9 Hours
RTOS for Image Processing – Embedded RTOS for voice over IP – RTOS
133
Signature of the Chairman BOS EEE
for fault Tolerant Applications – RTOS for Control Systems.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Hermann Kopetz, ―Real Time Systems – Design Principles for
Distributed Embedded Applications‖, Springer Science & Business
Media,2011.
2. Charles Crowley, ―Operating Systems-A Design Oriented approach‖
McGraw Hill, 2005.
3. C.M. Krishna, Kang, G.Shin, ―Real Time Systems‖, Tata McGraw
Hill, 2010.
4. Raymond J.A.Bhur, Donald L.Bailey, ―An Introduction to Real
Time Systems‖, Prentice Hall of India, 2006.
5. Intel Manual on 16 bit embedded controllers, Santa Clara, 2005.
134
Signature of the Chairman BOS EEE
P14EST202 EMBEDDED CONTROL SYSTEMS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Describe the basics and importance of real-time systems hardware
with software.
CO2: Demonstrate the interfacing of I/O Devices and Communication
devices.
CO3:Write Embedded C programming for practical implementations of
motors and ability to solve the problems in embedded systems.
PRE-REQUISITE
1. Embedded Processors
2. Microcontroller Based System Design
CONTROL OF HARDWARE AND SOFTWARE 6 Hours
Controlling the hardware with software – Data lines – Address lines -
Ports – Schematic representation – Bit masking – Programmable
peripheral interface –Switch input detection – 74 LS 244.
INPUT-OUTPUT DEVICES 8 Hours
Keyboard basics – Keyboard scanning algorithm – Multiplexed LED
displays – Character LCD modules – LCD module display – Configuration
– Time-of-day clock– Timer manager - Interrupts - Interrupt service
routines – IRQ - ISR – Interrupt vector or dispatch table multiple-point -
Interrupt-driven pulse width modulation.
D/A AND A/D CONVERSION 12 Hours
R 2R ladder - Resistor network analysis - Port offsets - Triangle waves
analog vs. digital values - ADC0809 – Auto port detect - Recording and
playing back voice - Capturing analog information in the timer interrupt
service routine - Automatic, multiple channel analog to digital data
acquisition.
135
Signature of the Chairman BOS EEE
ASYNCHRONOUS SERIAL COMMUNICATION 9 Hours
Asynchronous serial communication – RS-232 – RS-485 – Sending and
receiving data – Serial ports on PC – Low-level PC serial I/O module -
Buffered serial I/O.
CASE STUDIES: EMBEDDED C PROGRAMMING 10 Hours
Multiple closure problems – Basic outputs with PPI – Controlling motors –
Bidirectional control of motors – H bridge – Telephonic systems – Stepper
control –Inventory control systems.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1 Jean J. Labrosse, ―Embedded Systems Building Blocks:
Complete and Ready- To-Use Modules in C‖, Paul Temme, 2000.
2 Staartor, Ball P.E, ―Embedded Microprocessor Systems – Real
World Design‖, Newnes Publications, 2002.
3 Hermann Kopetz, ―Real Time Systems – Design Principles for
Distributed Embedded Applications‖, Springer Science &
Business Media, 2011.
4 Daniel W. Lewis, ―Fundamentals of Embedded Software where C
and Assembly meet‖, Prentice Hall of India, 2002.
136
Signature of the Chairman BOS EEE
P14EST203 EMBEDDED PROCESSORS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Describe the functional requirements of the hardware and software
components of ARM processor Families.
CO2: Recall the instruction set and able to write program for DSP
applications.
CO3: Outline the Black fin processor in all aspects.
PRE-REQUISITE
1. Advanced Embedded System
ARM EMBEDDED SYSTEMS 9 Hours
ARM Embedded Systems – Design Philosophy –Systems Hardware –
Systems Software – ARM processor fundamentals – ARM processor
families.
ARM PROGRAMMING 9 Hours
ARM Instruction Set – The Thumb Instruction Set- Exception and
Interrupt handling – Firmware - Example programs with embedded
operating system for ARM.
ARM DSP 9 Hours
ARM Digital Signal Processing – Introduction to DSP on the ARM – FIR
– IIR – DFT Exception and Interrupt Handling ARM Memory
Managements Unit.
BLACKFIN PROCESSOR 9 Hours
Introduction to BLACKFIN processor : Embedded Processor – Micro
signal Architecture – Real time embedded signal processing -
Architecture – Software tools –Number formats - Overview of signal
acquisition and transfer to memory- DMA operations - Using cache –
Scratchpad memory of BLACKFIN processor- power management.
137
Signature of the Chairman BOS EEE
PRACTICAL DSP APPLICATIONS 9 Hours
Overview of Real time processing - Signal generator with Blackfin
processor -Implementation of FIR – IIR filters – Graphic equalizer - Audio
coding and audio effects – Digital Image processing.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1. Bary B. Brey, ―The Intel Microprocessors Architecture,
Programming and Interfacing‖, Prentice Hall of India, 2006, New
Delhi.
2. Andrew Sloss, Dominic Symes, and Chris Wright, ―ARM System
Developer's Guide: Designing and Optimizing System‖, Morgan
Kaufmann Series, 2004.
3. Woon-SengGan ,Sen M. Kuo, ―Embedded Signal Processing with
the Micro Signal Architecture‖ John Wiley & sons, 2007, New
Jersey.
4. Jason Andrews, ―Co-verification of Hardware and Software for
ARM SoC Design (Embedded Technology)‖,Newnes Publications,
2004.
138
Signature of the Chairman BOS EEE
P14EST204 VHDL L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Acquire the VLSI concepts and VHDL constructs.
CO2: Acquire the knowledge of programming structure of simple design
andmodeling concepts.
CO3:Familiarize sub programming, packages and files of VHDL.
PRE-REQUISITE
1. Digital System Design
VHDL FUNDAMENTALS 9 Hours
Fundamental Concepts – Modeling Digital Systems – Domains and Levels
of Modeling – Modeling Languages – VHDL Modeling concepts – Scalar
Data Types and Operations – Constants and variables – Scalar Types –
Type Classification – Attributes and Scalar types – Expressions and
operators – Sequential Statements – If statements – Case statements – Null
Statements – Loop statements – Assertion and Report statements.
COMPOSITE DATA TYPES AND BASIC MODELING
CONSTRUCTS
9 Hours
Arrays – Unconstrained Array types – Array Operations and Referencing –
Records – Basic Modeling Constructs – Entity Declarations – Architecture
Bodies – Behavioral Descriptions – Structural Descriptions – Design
Processing. Case Study: A pipelined Multiplier Accumulator.
SUBPROGRAMS AND PACKAGES 9 Hours
Procedures – Procedure Parameters – Concurrent Procedure Call
Statements – functions – Overloading – Visibility of Declarations –
Packages and Use Clauses – Package declarations – Package bodies – Use
Clauses – The predefined – Aliases - Aliases for data objects – Aliases for
Non-Data Items. Case Study: A Bit-Vector Arithmetic Package.
139
Signature of the Chairman BOS EEE
SIGNALS, COMPONENTS, CONFIGURATIONS 9 Hours
Basic Resolved signals – IEEE Std_Logic_1164 Resolved subtypes –
Resolved signal parameters – Generic Constants – Parameterizing
behavior – Parameterizing structure – Components and Configurations –
Components – Configuring component Instances – Configuration
Specification – Generate Statements – Generating iterative structure –
Conditionally generating structures – Configuration of generate
Statements. Case Study: The DLX Computer System.
ADTs AND FILES 9 Hours
Access Types – Linked Data structures – Abstract Data Types using
Packages – Files and Input/Output – Files – The Package Textio – Verilog.
Case Study: Queuing Networks.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1. Peter J. Ashenden, ―The Designer’s Guide to VHDL‖, 3rd
Edition,
Morgan Kaufmann Publishers, 2008, San Francisco.
2. ZainalabedinNavabi, ―VHDL Analysis and Modeling of Digital
Systems‖, 2nd
Edition, McGraw Hill International Editions,1998.
3. James M.Lee, ―Verilog Quick start‖, 3rd
Edition, Kluwer Academic
Publishers, 2002.
140
Signature of the Chairman BOS EEE
P14EST205 DSP FOR EMBEDDED SYSTEM L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Learn the various types of signal and signal conversion techniques.
CO2: Acquire the knowledge of transformation of the signal and analyze
the spectrum.
CO3: Describe the architecture of DSP and design digital and analog
filters.
PRE-REQUISITE
1. Digital Signal Processing
SIGNALS AND REPRESENTATION 9 Hours
Classification of systems: Continuous, discrete, linear, causal, stable,
dynamic, recursive, time variance; classification of signals: continuous and
discrete, energy and power; mathematical representation of signals;
spectral density; sampling techniques, quantization, quantization error,
Nyquist rate, aliasing effect. Digital signal representation, analog to digital
conversion.
DISCRETE TIME SYSTEM ANALYSIS 9 Hours
Z-transform and its properties, inverse z-transforms; difference equation –
Solution by z-transform, application to discrete systems - Stability
analysis, frequency response – Convolution – Fourier transform of discrete
sequence.
DISCRETE FOURIER TRANSFORM &
COMPUTATION
9 Hours
DFT properties, magnitude and phase representation - Computation of
DFT using FFT algorithm – DIT & DIF - FFT using radix 2 – Butterfly
structure.
141
Signature of the Chairman BOS EEE
DESIGN OF DIGITAL FILTERS 9 Hours
FIR & IIR filter realization – Parallel & cascade forms. FIR design:
Windowing Techniques – Need and choice of windows – Linear phase
characteristics. IIR design: Analog filter design - Butterworth and
Chebyshev approximations; digital design using impulse invariant and
bilinear transformation - Warping, prewarping - Frequency transformation.
PROGRAMMABLE DSP CHIPS 9 Hours
Architecture and features of Black fin Processor - Real-Time DSP
Fundamentals and Implementation Considerations - Memory System and
Data Transfer - Code Optimization.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. D.H. Hayes, ―Digital Signal Processing‖, Schaum’s Outline Series,
Tata McGraw Hill, 2009, New Delhi.
2. B. Venkataramani, M. Bhaskar, ―Digital Signal Processors,
Architecture, Programming and Applications‖, Tata McGraw Hill,
2003, New Delhi.
3. J.G. Proakis and D.G. Manolakis, ―Digital Signal Processing
Principles, Algorithms and Applications‖, Pearson Education, 2003,
New Delhi.
4. Alan V. Oppenheim, Ronald W. Schafer and John R. Buck,
―Discrete – Time Signal Processing‖, Pearson Education, 2003, New
Delhi.
5. Woon-SengGan, Sen.M. Kuo, ―Embedded Signal Processing with
the Micro Signal Architecture‖, John Willey Publications, 2006.
142
Signature of the Chairman BOS EEE
P14ESP201 EMBEDDED SYSTEM LABORATORY II L T P C
0 0 4 2
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Ability to design, implement, and evaluate an embedded-based
system, process, component, or program to meet desired needs.
CO2: Ability to analyze a problem, and identify the computing
requirements appropriate to its solution.
CO3:Ability to design I/O programming, ADC/DAC, Timers, Interrupts.
PRE-REQUISITE
1. Embedded Processors
2. VHDL
LIST OF EXPERIMENTS:
1. Write a program to demonstrate I/O operation of ARM kit using
LED.
2. Write a program to interface seven segment displays to ARM kit.
3. Write a program to interface LCD to ARM kit.
4. Write an ALP to find the GCD (Greatest Common Divisor), with
and without conditional execution of ARM instructions.
5. Write a program to multiply two matrices with and without MLA
instruction.
6. Write a program to scan the keypad, assign own values to the keys
and display the key pressed.
7. Write a program for convolution of two sequences with and without
MLA instruction.
8. I/O programming, ADC/DAC, Timers, Interrupts.
9. Design with Programmable Logic Devices using Xilinx/Altera
FPGA and CPLD. Design and Implementation of simple
Combinational/Sequential Circuits.
Experiments beyond the syllabus should be conducted.
Practical :45 Hrs Total: 45 Hrs
143
Signature of the Chairman BOS EEE
SEMSTER III
144
Signature of the Chairman BOS EEE
P14ESP301 EMBEDDED SYSTEM LABORATORY III L T P C
0 0 4 2
COURSE OUTCOMES
After successful completion of this course, the students should be able
CO1: Write DSP programs using CCS.
CO2: Demonstrate the programs in TMS320C6713 kits.
CO3: Develop a mini project.
PRE-REQUISITE
1. Digital Signal Processing
LIST OF EXPERIMENTS:
Write DSP program for TMS320C6713 using CCS
1. Correlation,
2. Convolution,
3. Arithmetic adder,
4. Multiplier,
5. Design of Filters – FIR based , IIR based
6. Implementation of IPC mechanism using Micruim OS – II - RTOS
7. Hardware project (using any one controller – 8051, PIC, ARM, FPGA, DSP)
Experiments beyond the syllabus should be conducted.
Practical :45 Hrs Total: 45 Hrs
145
Signature of the Chairman BOS EEE
ELECTIVE I
146
Signature of the Chairman BOS EEE
P14ESTE01 INDUSTRIAL AUTOMATION AND
CONTROL
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Demonstrate proficiency in automation
programming/troubleshooting related to programmable logic
controllers and digital controllers required for industrial
employment.
CO2: Demonstrate problem solving skills used in ladder logic for
development of industrial automation.
CO3: Students will be acquainted with knowledge of CNC based
automated systems for case studies of various industries.
PRE-REQUISITE
1. NIL
INTRODUCTION TO INDUSTRIAL AUTOMATION 9 Hours
Fundamentals of Industrial Automation and Control Elements- Principles
and Strategies - Smart Sensors, Transducers and Motion Actuators- PID
Controller- Digital Controller. Program of Instructions.
PROGRAMMABLE LOGIC CONTROLLERS 9 Hours
Process Controller- Relay Logic – Programmable Logic Controller- Basic
Structure –Ladder Logic- Programming- PLC Internal Operation and
Signal Processing- I/O Processing- Remote Access- Communication
System for Industrial Automation- Intelligent System for Monitoring,
Supervision and Control.
COMPUTER NUMERIC CONTROL 9 Hours
Introduction to CNC Systems- Types –Analogue, Digital, Absolute and
Incremental- Open Loop and Closed Loop - CNC Drives and Feedback
Devices- Adaptive Control – CNC Part Programming.
AUTOMATED SYSTEMS 9 Hours
Fixed Automation – Programmable Automation – Flexible Automation -
147
Signature of the Chairman BOS EEE
Material Transport Systems – Process Monitoring – Conveyor Systems –
Cranes and Hoists – Automated Storage and Retrieval Systems –
Automated Data Capture – Digital Factories.
INDUSTRIAL APPLICATIONS 9 Hours
Industrial Control Applications - Cement Plant – Thermal Plant- Water
Treatment Plant- Steel Plant- Irrigation Canal Management- Paper
Industry.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Krishna Kant, ―Computer-Based Industrial Control‖, 2nd
Edition,
Prentice Hall of India, 2010, New Delhi.
2. Gray Dunning, ―Introduction to Programmable Logic Controllers‖,
Delmar Publishers, 2005.
3. Frank D. Petruzella, ―Programmable Logic Controllers‖, 3rd
Edition,
Tata McGraw Hill, 2010.
4. Richard L.Shell, Ernest L.Hall, ―Hand Book of Industrial
Automation‖, Published by Marcel Dekker Inc., Society of
Manufacturing Engineers, 2009.
5. Mikell P. Groover, ―Automation, Production Systems and Computer
Integrated Manufacturing‖, 3rd
Edition, Prentice Hall, 2008.
148
Signature of the Chairman BOS EEE
P14ESTE02 ADVANCED COMPUTER
ARCHITECTURE
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: To explain the fundamentals of CPU, Memory and Input, output
devices.
CO2: Understand the various techniques to enhance a processors ability to
exploit Instruction-level parallelism (ILP), and its challenges.
CO3: Understand multithreading by using ILP and supporting thread-level
parallelism (TLP).
PRE-REQUISITE
1. NIL
FUNDAMENTALS OF COMPUTER DESIGN 9 Hours
Review of fundamentals of CPU, Memory and IO – Performance
evaluation – Instruction set principles – Design issues – Example
Architectures.
INSTRUCTION LEVEL PARALLELISM 9 Hours
Pipelining and handling hazards – Dynamic Scheduling – Dynamic
hardware prediction – Multiple issue – Hardware based speculation –
Limitations of ILP – Case studies.
INSTRUCTION LEVEL PARALLELISM WITH
SOFTWAR APPROACHES
9 Hours
Compiler techniques for exposing ILP – Static branch prediction – VLIW
& EPIC – Advanced compiler support – Hardware support for exposing
parallelism – Hardware versus software speculation mechanisms – IA 64
and ltanium processor.
MEMORY AND I/O 9 Hours
Cache performance – Reducing cache miss penalty and miss rate –
Reducing hit time – Main memory and performance – Memory
technology. Types of storage devices – Buses – RAID – Reliability,
149
Signature of the Chairman BOS EEE
availability and dependability – I/O performance measures – Designing an
I/O system.
MULTIPROCESSORS AND THREAD LEVEL
PARALLELISM
9 Hours
Symmetric and distributed shared memory architectures – Performance
issues – Synchronization – Models of memory consistency –
Multithreading.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. John L.Hennessey and David A.Patterson, ―Computer Architecture:
A Quantitative Approach‖,5th Edition, Morgan Kaufmann, 2011.
2. D.Sia, T.Fountain and P.Kacsuk, ―Advanced computer
Architectures: A Design Space Approach‖, Addion Wesley, 2009.
3. Hessham EL- Rewini, MostafaAbd- El – Barr, ―Advanced Computer
Architecture and Parallel Processing‖, John Wiley, 2005.
4. Mark D Hill, Norman P Jouppi, Gurindar S Sohi, ―Readingsin
Computer Architecture‖, Morgan Kaufmann, 2000.
5. Mano.M.M. ―Computer System Architecture‖,Prentice Hall of India,
2009.
150
Signature of the Chairman BOS EEE
P14ESTE03 DIGITAL CONTROL SYSTEMS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Students will have the knowledge of Z- Transform.
CO2: To understand the stability analysis of digital control system.
CO3: To explain the digital process control design and concepts of state
space.
PRE-REQUISITE
1. Course on Control System
MODELLING OF DIGITAL SYSTEM 9 Hours
Types of signal – digital control systems – block diagram – quantization
and quantization error – review of Z transform and its applications – Pulse
transfer function – block diagrams – signal flow graphs – ZOH and its
characteristics.
ANALYSIS OF DIGITAL CONTROL SYSTEMS 9 Hours
Mapping of s plane and z plane – steady error analysis – root locus – polar
plot – Nyquist stability criterion – Bode diagram – gain and phase –
margins – Jury’s stability test.
DESIGN OF DIGITAL CONTROL SYSTEM 9 Hours
Design of continuous controllers with equivalent digital controllers –
realization of digital controllers by digital programming – digital PID
controller – design through Bilinear transformation – design in Z plane
using root locus diagram – phase lead, phase lag, networks, PID, PD PI
controllers.
STATE SPACE ANALYSIS OF DIGITAL CONTROL
SYSTEMS
9 Hours
Concept of state space – state space representations of discrete systems –
canonical forms – state transition matrix – properties – solution to
homogeneous and non- homogeneous state equations.
151
Signature of the Chairman BOS EEE
POLE PLACEMENT AND OBSERVER DESIGN 9 Hours
Controllability and observability of linear time invariant discrete systems –
transforming state –space equations into canonical forms – design using
pole placement – state observer – design of full order and reduced order
state observers.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. M.Gopal, ―Digital Control Engineering‖, 2nd
Edition, New Age
International, 2014.
2. Katsuhiko Ogata, ―Discrete-Time Control Systems‖, 2nd
Edition,
Pearson Education, 2015.
3. Benjamin C. Kuo, ―Digital Control Systems‖, 2nd
Edition, Oxford
University Press,2012.
4. Gene F.FranklinJ.David Powell and Michael Workman, ―Digital
Control of Dynamic Systems‖, 3rd
Edition, Addision Wesley, 2005.
5. Charles L. Phillips and H.Troy Nagle, ―Digital Control System
Analysis and Design‖, 4thEdition, Prentice Hall,2014.
152
Signature of the Chairman BOS EEE
P14ESTE04 SOLID STATE CONVERTERS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Compare the concepts and analysis the AC-DC converters.
CO2:Students able to acquire the knowledge of analysis of DC-DC
converters.
CO3: Students familiarize the various types and detailed analysis of
inverters.
PRE-REQUISITE
1. Power Electronics
SINGLE PHASE AC-DC CONVERTER 9 Hours
Uncontrolled, half controlled and fully controlled converters with R-L, R-
L-E loads and freewheeling diodes – continuous and discontinuous models
of operation – inverter operation – Dual converter - Sequence control of
converters – performance parameters: harmonics, ripple, distortion, power
factor – effect of source impedance and overlap.
THREE PHASE AC-DC CONVERTER 9 Hours
Uncontrolled and fully controlled – converter with R, R-L, R-L-E - loads
and freewheeling diodes – inverter operation and its limit – dual inverter –
performance parameters – effect of source impedance and over lap.
DC-DC CONVERTERS 9 Hours
Principles of step-down and step-up converters – Analysis of buck, boost,
buck-boost and Cuk converters – time ratio and current limit control – Full
bridge converter – Resonant and quasi – resonant converters.
SINGLE PHASE INVERTERS 9 Hours
Principle of operation of half and full bridge inverters – Performance
parameters – Voltage control of single phase inverters using various PWM
techniques – various harmonic elimination techniques – forced
commutated Thyristor inverters.
153
Signature of the Chairman BOS EEE
THREE PHASE VOLTAGE SOURCE INVERTERS 9 Hours
180 degree and 120 degree conduction mode inverters with star and delta
connected loads – voltage control of three phase inverters.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Ned Mohan, Tore. M. Undeland, William. P. Robbins, ―Power
Electronics: Converters, Applications and Design‖, 3rd
Edition,
Wiley, 2010, India.
2. M.H. Rashid, ―Power Electronics: Circuits, Devices and
Applications‖, 3rd
Edition, Pearson Education, 2014, New Delhi.
3. P. C Sen., ―Modern Power Electronics‖, 1st Edition, Wheeler
publishing Co, 1998, New Delhi.
4. Jai P. Agrawal, ―Power Electronics Systems‖, 2nd
Edition,
Pearson Education, 2002.
5. P.S. Bimbra, ―Power Electronics‖, Khanna Publishers, 2012, New
Delhi.
6. Bimal K. Bose. ―Modern Power Electronics and AC Drives‖, 2nd
Edition, Prentice Hall of India, 2005.
154
Signature of the Chairman BOS EEE
ELECTIVE II
155
Signature of the Chairman BOS EEE
P14ESTE05 INTELLIGENT CONTROL L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Describes various soft computing required for developing intelligent
systems.
CO2: Outlines the concept of ANN and genetic algorithm and its role in
modelling system behaviour.
CO3: Applies the knowledge of fuzzy logic techniques to analyze the
system behaviour with the support of development tools.
PRE-REQUISITE
1. System Simulation and Modeling
SYSTEMS AND APPROACHES 9 Hours
Architecutre of intelligent control –Knowledge representation-Expert
systems. Hard computing - soft computing – features of hart and soft
computing- Hybrid computing – optimization and some Traditional
Methods – Drawbacks of Traditional optimization Methods.
ARTIFICIAL NEURAL NETWORKS 9 Hours
Introduction-Biological Neuron – Artificial Neuron – Neuron Modelling –
learning rules – Single layor – Multilayer feed forward Network – Back
Propagation – learning faction – Feedback Network – Hopfield network-
Neural network based controller-Application of ANN.
FUZZY LOGIC SYSTEM 9 Hours
Crisp sets – Fuzzy sets – Fuzzy relations – Fuzzification – Defuzzification
– Fuzzy rules – Membership function – Fuzzy Controller for non linear
systems-Applications of FLC.
GENETIC ALGORITHM 9 Hours
Basic concepts – Working Principle – Encoding – Fitness function –
reproduction – cross over – Mutation – Convergence of genetic
Algorithms – Application of GA.
156
Signature of the Chairman BOS EEE
IMPLEMENTATION OF GA,NN AND FUZZY USING
MATLAB TOOL BOX
9 Hours
Genetic Algorithm application to optimization problem using GA Tool
box-Implementation of fuzzy controller using MATLAB tool box- Control
of linear and non linear system by neural network controller using
MATLAB tool box.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Jacek.M.Zurada, ―Introduction to Artificial Neural Systems‖, Jaico
Publishing House, 2012.
2. Kosko, B. ―Neural Networks and Fuzzy Systems‖, Prentice Hall
International, 2007.
3. Klir G.J. &Folger T.A. ―Fuzzy sets, uncertainty and Information‖,
Prentice Hall of India, 2003.
4. Zimmermann H.J. ―Fuzzy set theory-and its Applications‖, Kluwer
Academic Publishers, 2004.
5. Sivanandam S. N., Deepa S. N, ―Introduction to Genetic
Algorithms‖, Springer, 2008.
157
Signature of the Chairman BOS EEE
P14ESTE06 ADVANCED EMBEDDED SYSTEMS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Summarize the various design phases in system development and
the role of communication protocols.
CO2: Outline the RISC features of 32-bit ARM processor working in two
different modes and memory management techniques.
CO3: Applies the fundamental knowledge on ARM processor in writing
an optimized and effective programs by using support tools.
PRE-REQUISITE
1. Embedded System
PRINCIPLES OF EMBEDDED SYSTEM 9 Hours
Introduction - Embedded systems description, definition, design
considerations & requirements - Overview of Embedded system
Architecture - Categories of Embedded Systems - Product specifications -
hardware/software partitioning - iterations and implementation - hardware
software integration - product testing techniques. Wired Communication
Protocols: UART - Inter Integrated Circuit (I2C)- Serial Peripheral
Interface (SPI) - Controller Area Network (CAN).Wireless communication
Protocols: Zigbee Protocols – Blue tooth Protocols - IrDA.
ARM PROCESSOR FUNDAMENTALS 9 Hours
ARM core Introduction – Registers – Current Program Status Register –
Pipeline –Exception – Interrupts – Vector Table – Core Extension –
Architecture Revisions –ARM Processor Families – ARM Instruction Set
– Thumb Instruction set – Thumb Register Usuage – ARM – Thumb
Interworking – Stack Instruction – Software Interrupt Instruction.
CACHES AND MMU 9 Hours
The Memory Hierarchy and Cache Memory – Cache Architecture - Cache
Policy –Co Processor and Caches – Flushing and Cleaning Cache Memory
158
Signature of the Chairman BOS EEE
– Cache Lockdown – Caches and Software Performance. MMU: Moving
from an MPU to an MMU – Virtual Memory – Details of ARM MMU –
The Caches and Write Buffer – Co Processor and MMU configuration.
OPTIMIZED PRIMITIVES 9 Hours
Double Precision Integer Multiplication – Integer Normalization and count
Leading Zeros – Division – Square Roots – Transcendental Functions:
Log,,exp,sin,cos – Endian Reversal and Bit Operations – Saturated and
Rounded Arithmetic – Random Number Generation.
WRITING AND OPTIMIZING ARM ASSEMBLY CODE 9 Hours
Writing Assembly Code – Profiling and Cycle Counting – Instruction
Scheduling –Register Allocation – Conditional Execution – Looping
Constructs – Bit Manipulation – Efficient Switches – Handling Unaligned
Data.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Andrew N.Sloss, Dominic Symes, Chris Wright, ―ARM System
Developer’s Guide (Morgan Kaufmann Series in Computer
Architecture and Design)‖, Morgan Kaufmann, 2004.
2. Tammy Noergaard, ―Embedded Systems Architecture‖, Newnes,
2005.
3. David Seal, ―ARM Architecture Reference Manual‖, 2nd
Edition,
Addison Wesley, 2005.
4. Steve Furbe, ―ARM System-on-Chip Architecture‖, 2nd
Edition,
Addison-Wesley Professional, 2000.
159
Signature of the Chairman BOS EEE
P14ESTE07 EMBEDDED NETWORKING L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: To explain about CAN controller and its features.
CO2: To study about CAN development tools and implementation
methods.
CO3: To describe the implementation issues in CAN.
PRE-REQUISITE
1. NIL
EMBEDDED NETWORKING 9 Hours
Embedded networking – code requirements – Communication
requirements – Introduction to CAN open – CAN open standard – Object
directory – Electronic Data Sheets & Device – Configuration files –
Service Data Objectives – Network management CAN open messages –
Device profile encoder.
CONTROLLER AREA NETWORKS 9 Hours
CAN open configuration – Evaluating system requirements choosing
devices and tools – Configuring single devices – Overall network
configuration – Network simulation – Network Commissioning –
Advanced features and testing.
CAN CONTROLLER AND DEVELIOPMENT TOOLS 9 Hours
Controller Area Network – Underlying Technology CAN Overview –
Selecting a CAN Controller – CAN development tools.
IMPLEMENTATION OF CAN 9 Hours
Implementing CAN open Communication layout and requirements –
Comparison of implementation methods – Micro CAN open – CAN open
source code –Conformance test – Entire design life cycle.
160
Signature of the Chairman BOS EEE
IMPLEMENTATION ISSUES 9 Hours
Implementation issues – Physical layer – Data types – Object dictionary –
Communication object identifiers – Emerging objects – Node states.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1 Olaf P. Feiffer, Andrew Ayre and Christian Keydel, ―Embedded
Networking with CAN and CAN open‖, RTC Books, 2008.
2 Peter Barry and Gerard Hartnett, ―Designing Embedded Networking
Applications‖, Intel Press, 2005
3 Gregory J. Pottie and William J. Kaiser, ―Principles of Embedded
Network System Design‖, Cambridge University Press, 2009.
4 Jason Andrews, ―Co-verification of Hardware and Software for
ARM SoC Design (Embedded Technology)‖, Newnes, 2004.
161
Signature of the Chairman BOS EEE
P14ESTE08 DIGITAL IMAGE PROCESSING L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Understand the mathematical concepts involved in video processing.
CO2: Analyze the various transformation techniques that can be applied to
enhance image quality.
CO3: Apply the knowledge of mathematical technique for real—time
video processing.
PRE-REQUISITE
1. NIL
DIGITAL IMAGE FUNDAMENTALS 9 Hours
Image Representation - gray scale and colour Images, image sampling and
quantization. Two dimensional orthogonal transforms - DFT, WHT, Haar
transform, KLT, DCT- Introduction to transforms on Image and video
processing.
IMAGE ENHANCEMENT AND EDGE DETECTION 9 Hours
Image Enhancement - filters in spatial and frequency domains, histogram-
based processing, homomorphic filtering. Edge Detection - non parametric
and model based approaches, LOG filters, localisation problem-
Segmentation -Introduction to Region Growing.
IMAGE RESTORATION 9 Hours
Image Restoration - PSF, circulant and block - circulant matrices,
deconvolution, restoration using inverse filtering, Wiener filtering and
maximum entropy-based methods.
MORPHOLOGICAL IMAGE PROCESSING 9 Hours
Mathematical Morphology - binary morphology, dilation, erosion, opening
and closing, duality relations, gray scale morphology, applications such as
hit-and-miss transform, thinning and shape decomposition.
162
Signature of the Chairman BOS EEE
IMAGE PROCESSING 9 Hours
Computer Tomography - parallel beam projection, Radon transform, and
its inverse, Back-projection operator, Fourier-slice theorem, CBP and FBP
methods, ART, Fan beam projection and applications.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. MilianSonka, Vaclav Hlavac, Roger Boyle, ―Image Processing,
Analysis and Machine Vision‖, 3rd
Edition, 4th Edition, Cengage
Learning, 2014.
2. R.M. Haralick, and L.G. Shapiro, ―Computer and Robot Vision‖, Vol-
1, Addison Wesley, 1993.
3. R. Jain, R. Kasturi and B.G. Schunck, ―Machine Vision‖, McGrawHill,
1995.
4. Kenneth R. Castleman, ―Digital Image Processing‖ Pearson Education,
2008.
5. William. K. Pratt, ―Digital Image Processing‖, John Wiley, 2007, New
York.
163
Signature of the Chairman BOS EEE
ELECTIVE
III, IV, V
164
Signature of the Chairman BOS EEE
P14PETE10 ADVANCED DIGITAL SIGNAL
PROCESSING
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Able to understand basics of discrete random signal processing.
CO2: Able to estimate the spectrum and use the filters for noise
cancellation and echo cancellation.
CO4: Able to understand concept of multi-rate digital signal processing &
wavelet transformer.
PRE-REQUISITE
1. Signals and System
2. Digital Signal Processing
DISCRETE RANDOM SIGNAL PROCESSING 9 Hours
Discrete Random Processes – Ensemble averages, stationary processes,
Autocorrelation and Auto covariance
matrices – Parseval‟s Theorem – Wiener-Khintchine Relation – Power
Spectral Density – Periodogram Spectral Factorization – Filtering random
processes – Low Pass Filtering of White Noise – Parameter estimation:
Bias and consistency.
SPECTRUM ESTIMATION 11 Hours
Estimation of spectra from finite duration signals – Non- Parametric
Methods – Correlation Method – Periodogram Estimator – Performance
Analysis of Estimators – Unbiased, Consistent Estimators – Modified
periodogram – Bartlett and Welch methods – Blackman – Tukey method -
Parametric Methods – AR, MA, and ARMA model based spectral
estimation – Parameter Estimation –Yule-Walker equations – Solutions
using Durbin‟s algorithm.
LINEAR ESTIMATION AND PREDICTION 8 Hours
Linear prediction – Forward and backward predictions – Solutions of the
Normal equations – Levinson - Durbin algorithms – Least mean squared
165
Signature of the Chairman BOS EEE
error criterion – Wiener filter for filtering and prediction – FIR Wiener
filter and Wiener IIR filters – Discrete Kalman filter.
ADAPTIVE FILTERS 8 Hours
FIR adaptive filters – Adaptive filter based on steepest descent method –
Widrow-Hoff LMS adaptive algorithm – Normalized LMS – Adaptive
channel equalization – Adaptive echo cancellation – Adaptive noise
cancellation – Adaptive recursive filters (IIR) – RLS adaptive filters –
Exponentially weighted RLS – Sliding window RLS.
MULTIRATE DIGITAL SIGNAL PROCESSING 9 Hours
Mathematical description of change of sampling rate – Interpolation and
Decimation – Decimation by an integer factor – Interpolation by an integer
factor – Sampling rate conversion by a rational factor – Filter
implementation for sampling rate conversion – direct form FIR structures
– Polyphase filter structures – Timevariant structures – Multistage
implementation of multirate system – Application to sub band coding –
Wavelet transform and filter bank implementation of wavelet expansion of
signals.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Monson H. Hayes, ―Statistical Digital Signal Processing and
Modeling‖, Wiley India, 2008.
2. John G. Proakis and Dimitris G. Manolakis, ―Digital Signal
Processing‖, 4th Edition, Prentice Hall of India, 2006, New Delhi.
3. John G. Proakis, Charles M. Rader, ―Algorithms for Statistical
Signal Processing‖, Pearson Education, 2002, New Delhi.
166
Signature of the Chairman BOS EEE
P14ESTE09 INDUSTRIAL ROBOTICS AND
EXPERT SYSTEMS
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Describe the robotic drives control and cell design.
CO2: Know the mechanical parameters of the robot and its sensors and
vision systems.
CO3: Design or write the coding for robot using artificial intelligence and
expert systems.
PRE-REQUISITE
1. Industrial Automation and Control
2. Microcontroller Based System Design
ROBOTIC KINEMATICS AND DYNAMICS 9 Hours
Introduction to robotic kinematics- Definition, need and scope of industrial
robot-Robot anatomy-Work volume-Precision movement-End effectors-
Sensors, robot kinematics- Direct and inverse kinematics- Robot
trajectories- Control of robot manipulations- Robot dynamics- Methods for
orientation and location of objects.
ROBOT DRIVES AND CONTROL 9 Hours
Controlling the robot motion- Position and velocity sensing devices-
Design of drivers of drives system- Hydraulic and pneumatic and linear
and rotary actuators and control valves- Electro hydraulic servo valves,
electric drives- Motors- designing of end effectors- Vacuum, magnetic and
air operated grippers.
ROBOT SENSORS AND VISION SYSTEM 9 Hours
Transducers and sensors- Sensors in robot- Tactile sensor- Proximity and
range sensors- Sensing joint forces- Robotic mission systems- Image
gripping- image processing and image segmentation- Pattern recognition,
training of vision system.
167
Signature of the Chairman BOS EEE
ROBOTIC CELL DESIGN AND APPLICATION 9 Hours
Robot work cell design and control- Safety in Robotics- Robot cell
layouts- Multiple Robots and machine interference- Robot cycle time
analysis- Industrial applications of robots.
ROBOT PROGRAMMING 9 Hours
Artificial Intelligence and expert systems- Methods of Robot
programming- Characteristics of task level languages-Lead through
programming methods- Motion interpolation- Artificial Intelligence-
Basics- Goals of Artificial intelligence- AI Techniques-Problems-
Representation in AI- Problems reduction and solution techniques-
Application of AI and KBES in Robots.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. C.S.G. Lee, K. S. Fu, and R.C. Gonzalez ―Robotics: Control,
Sensing, Vision, and Intelligence‖, McGraw Hill, 2008.
2. Kozyrey, Yu.‖Industrial Robotics‖, MIR Publishers, 1985, Mascow.
3. Deb.S.R, ―Robotics Technology and Flexible Automation‖,2nd
Edition, McGraw Hill, 2009.
4. Mikell.P.Groover, Michell Weiss, Roger.N.Nagel, Nicholas G.Odrey
and Ashish Dutta, ―Industrial Robotics: Technology, Programming
and Applications‖, 2nd
Edition, TataMcGraw Hill, 2012.
5. Timothy Jordanides and Bruce Torby, ―Expert Systems and
Robotics‖, Springer- Verlag, 1991, New York.
6. Richard D.Klafter, Thomas A.Chmielewski and Michael Negin,
―Robotic Engineering: An Integrated Approach‖, 1st Edition,
PrenticeHall of India, 1989, New Delhi.
7. Low Kin Huat ―Industrial Robotics: Programming, Simulation and
Applications‖, 1st Edition, Intech Publishers,2007.
8. Jesus Aramburo, Antonio R. Trevino ―Advances in Robotics,
Automation and Control‖, 1st Edition, Intech Publishers,2008.
P14ESTE10 EMBEDDED COMMUNICATION L T P C
168
Signature of the Chairman BOS EEE
SOFTWARE DESIGN 3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Explain the OSI reference model and communication layer.
CO2: Describe the procedure software partitioning and speed up the
communication process.
CO3: Distinguish the various management schemes and describe Multi
board communication.
PRE-REQUISITE
1. NIL
OSI REFERENCE MODEL 9 Hours
OSI Reference Model – Communication Devices – Communication Echo
System – Design Consideration – Host Based Communication –
Embedded Communication System – OS Vs RTOS.
SOFTWARE PARTITIONING 9 Hours
Software Partitioning – Limitation of strict Layering – Tasks & Modules –
Modules and Task Decomposition – Switch - Bridges - Routers – Protocol
Implementation: STP - RSTP – Management Types (SNMP) – Debugging
Protocols.
DATA STRUCTURES 9 Hours
Tables & other Data Structures – Partitioning of Structures and Tables –
Implementation – Speeding Up access – Table Resizing – Table access
routines – Buffer and Timer Management – Third Party Protocol Libraries.
MANAGEMENT SCHEMES 9 Hours
Management Software – Device Management – Management Schemes –
Router Management – Management of Sub System Architecture – Device
to manage configuration – System Start up and configuration.
MULTI BOARD COMMUNICATION 9 Hours
169
Signature of the Chairman BOS EEE
Multi Board Communication Software Design – Multi Board Architecture
– Single control Card and Multiple line Card Architecture – Interface for
Multi Board software – Failures and Fault – Tolerance in Multi Board
Systems – Hardware independent development – Using a COTS Board –
Development Environment – Test Tools.
Theory:45 HrsTotal: 45 Hrs
REFERENCES
1. Sridhar .T, ―Designing Embedded Communication Software‖, CMP
Books, 2003.
2. Ahmed Amine Jerraya, SungjooYoo, DiederixVeskest and
NorbestWhn, ―Embedded Software for SOC‖, 1st Edition, Kulwar
Academic Publishers, 2004.
3. Comer.D,―Computer networks and Internet‖, 3rd
Edition, Prentice
Hall,2001.
170
Signature of the Chairman BOS EEE
P14ESTE11 EMBEDDED SENSOR NETWORKS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Learn the various hardware, software platforms that exist for sensor
networks.
CO2: Students will learn how to program communicate with embedded
system technologies.
CO3: Evaluate the performance of sensor networks.
PRE-REQUISITE
1. NIL
SENSOR NETWORKS 9 Hours
Overview of sensor networks - Constraints and Challenges – Advantages
of sensor networks – Applications – Collaborative Processing – Key
definitions in sensor networks – Tracking scenario – Problem formulation
–Distributed representation and interference of states – Tracking multiple
objects – Sensor models – performance comparison and metrics.
NETWORKING SENSORS 9 Hours
Key assumptions – Medium access control – S-MAC Protocol – IEEE
802.15.4 standard and ZigBee – General Issues – Geographic, Energy-
Aware Routing – Attribute based routing.
INFRASTRUCTURE ESTABLISHMENT 9 Hours
Topology control – Clustering-Time synchronization – Localization –
Task driven sensing- Role of sensor nodes – Information based tasking –
Routing and aggregation.
SENSOR NETWORK DATABASE 9 Hours
Sensor Database Challenges – Querying the physical environment –
Interfaces – In-network aggregation – Data centric storage – Data indices
and range queries – Distributed Hierarchical aggregation – Temporal data.
171
Signature of the Chairman BOS EEE
SENSOR NETWORK PLATFORMS AND TOOLS 9 Hours
Sensor Node Hardware – Sensor network programming challenges – Node
level software platforms- Operating system TinyOS – Node level
simulators – State centric programming- Applications and future
directions.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Feng Zhao, Leonidas Guibas, ―Wireless Sensor Networks An
information processing approach‖, MoganKanufmann Publishers,
2004
2. Richard Zurawski, ―Embedded System Hand Book‖, CRC Press,
2009.
3. Iran Stojmenovic, ―Hand book of sensor networks‖, John Wiley &
Sons, 2005.
4. Michel Banatre, Pedre Jose Marron, AnibalOllero and Adam Wilisz,
―Cooperating Embedded System and Wireless sensor Network‖,
John Willy, 2008.
5. Embedded System Handbook, ―Networked Embedded Systems‖,
2nd
Edition, CRC press, 2009.
172
Signature of the Chairman BOS EEE
P14ESTE12 EMBEDDED CONTROL OF
ELECTRICAL DRIVES
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Exposure to fundamentals of microcontroller and able to write
simple programs for specific applications.
CO2: List out the techniques for interfacing I/O devices to the
microcontroller, including several specific standard I/O devices.
CO3: Comprehend in programming and able to analyze the real time
problems.
PRE-REQUISITE
1. Power Electronics
MC68HC11 Microcontroller 9 Hours
Architecture memory organization – Addressing modes – Instruction set –
Programming techniques – simple program.
PERIPHERALS OF MC68HC11 9 Hours
I/O ports – handshaking techniques – reset and interrupts – serial
communication interface – serial peripheral interface – programmable
timer – analog / digital interfacing – cache memory.
8096 ARCHITECTURE 9 Hours
CPU operation – Interrupt structure – Timers – High Speed Input / Output
Ports – I/O control and Status registers – Instruction Set – Addressing
Modes – Simple Programming – Queues – Tables and Strings – Stack
Memories – Key Switch – Parsing.
PERIPHERALS AND INTERFACING 9 Hours
Analog Interface – Serial Ports – Watch dog timers – Real Time Clock –
Multitasking – Bus Control – Memory Timing – External ROM and RAM
expansion – PWM control – A/D interfacing.
173
Signature of the Chairman BOS EEE
CASE STUDY FOR MC68HC118051 AND 8096 9 Hours
Real Time clock – DC Motor Speed Control – Generation of Gating
Signals for Converters and Inverters – Frequency Measurement –
Temperature Control
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. John B.Peatman, ―Design with Micro controllers‖, McGraw Hill,
2000, Singapore.
2. Michael Slater, ―Microprocessor based designsa comprehensive
guide to effective Hardware design‖ Prentice Hall, 2005, New
Jersey.
3. Intel Manual on 16 bit embedded controllers, Santa Clara, 2000.
4. Michael khevi, ―The M68Hc11 Microcontroller Applications in
Control, Instrumentation and Communication‖, Prentice Hall, 2005,
New Jersey.
174
Signature of the Chairman BOS EEE
P14ESTE13 VLSI ARCHITECTURE AND DESIGN
METHODOLOGIES
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Acquire the concept of VLSI design methodologies and hazards in
digital circuit.
CO2: Realize the architecture of programmable ASIC and realization of
high speed VLSI circuits.
CO3: Acquire the concept of simulation, synthesis and testing of digital
circuits.
PRE-REQUISITE
1. FPGA Architecture
VLSI DESIGN METHODOLOGIES 9 Hours
Overview of digital VLSI design methodologies – Trends in IC
Technology – Advanced Boolean algebra – Shannon’s expansion theorem
– Consensus theorem – Octal designation- Run measure – Buffer gates -
Gate expander – Reed Muller expansion – Synthesis of multiple output
combinational logic circuits by product map method – Design of static
hazard free, dynamic hazard free logic circuits.
ANALOG VLSI AND HIGH SPEED VLSI 9 Hours
Introduction to analog VLSI – realization of neural networks and switched
capacitor filters – Sub-micron technology and Gas VLSI Technology.
PROGRAMMABLE ASICS 9 Hours
Anti fuse – static RAM – EPROM and technology – PREP bench marks –
Actel ACT – Xilinx LCA – Altera flex – Altera MAX DC & AC inputs
and outputs – Clock and power inputs – Xilinx I/O blocks.
PROGRAMMABLE ASIC DESIGN SOFTWARE 9 Hours
Actel ACT – Xilinx LCA – Xilinx CPLD – Altera MAX 5000 and 7000 –
Altera MAX 9000 – design systems – logic synthesis – half gate –
schematic entry – Low level design language – PLA tools – EDIF – CFI
design representation.
175
Signature of the Chairman BOS EEE
LOGIC SYNTHESIS, SIMULATION AND TESTING 9 Hours
Basic features of VHDL language for behavioral modeling and simulation
– Summary of VHDL data types – Dataflow and structural modeling –
VHDL and logic synthesis – Circuit and layout verification – Types of
simulation – Boundary scan test – Fault simulation – Automatic test
pattern generation – design examples.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. William I.Fletcher, ―An Engineering Approach to Digital Design‖,
Prentice Hall of India, 1997.
2. Amar Mukharjee, ―Introduction to NMOS and CMOS VLSI System
Design‖, Prentice Hall, 1986.
3. M.J.S. Smith, ―Application – specific integrates circuits‖, Addison
Wesley Longman Inc. 1997.
4. Frederick J.Hill and Gerald R.Peterson, ―Computer Aided Logical
Design with emphasis on VLSI‖, 4thEdition, Wiley, 1993.
176
Signature of the Chairman BOS EEE
P14ESTE14 SOFTWARE TECHNOLOGY FOR
EMBEDDED SYSTEMS
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Outline the basics and importance of Linker / locator in real-time
systems.
CO2: Illustrate the functional requirements of the hardware and software
architecture of embedded systems.
CO3: Students familiarize embedded system software & Hardware
development tools.
PRE-REQUISITE
1. Real Time Systems
2. Real Time Operating Systems
3. Operating Systems
PROGRAMMING EMBEDDED SYSTEMS 9 Hours
Embedded Program – Role of Infinite loop – Compiling, Linking and
locating – downloading and debugging – Emulators and simulators
processor – External peripherals – Toper of memory – Memory testing –
Flash Memory.
OPERATING SYSTEM 9 Hours
Embedded operating system – Real time characteristics – Selection
process – Flashing the LED – serial ports – Zilog 85230 serial controlled
code efficiency – Code size – Reducing memory usage – Impact of C++.
HARDWARE FUNDAMENTALS 9 Hours
Buses – DMA – interrupts – Built-ins on the microprocessor –
Conventions used on schematics – Microprocessor Architectures –
Software Architectures – RTOS Architectures – Selecting Architecture.
177
Signature of the Chairman BOS EEE
RTOS 9 Hours
Tasks and Task states – Semaphores – Shared data – Message queues,
Mail boxes and pipes – Memory management – Interrupt routines –
Encapsulating semaphore and queues – Hard Real-time scheduling –
Power saving.
EMBEDDED SOFTWARE DEVELOPMENT TOOLS 9 Hours
Host and target machines – Linkers / Locators for Embedded Software –
Debugging techniques – Instruction set simulators Laboratory tools –
Practical example – Source code.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. David E.Simon,―An Embedded Software Primer‖, 1st Edition,
Perason Education, 2004.
2. Michael Bass, ―Programming Embedded Systems in C and C++‖,
1st Edition, O’Reilly, 2003.
3. Raymond J.A.Bhur, Donald L.Bailey, ―An Introduction to Real
Time Systems‖, Prentice Hall of India, 2006.
4. Rajkamal, ―Embedded system architecture, programming and
design‖, 2nd
Edition, Tata McGraw Hill, 2008.
5. Frank Vahid, Tony Givargas, ―Embedded System Design- a
Unified Hardware/ Software Introduction‖, John Wiley, 2002.
178
Signature of the Chairman BOS EEE
P14ESTE15 DSP INTEGRATED CIRCUITS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Gain knowledge of design methodologies and techniques applicable
to VLSI technology.
CO2: Design various filter circuit and analyze the problem of word length
effect.
CO3: Learn the fundamentals of the arithmetic units in DSP processor.
PRE-REQUISITE
1. Digital Signal Processing
DSP INTEGRATED CIRCUITS AND VLSI CIRCUIT
TECHNOLOGIES
9 Hours
Standard digital signal processors-Application specific IC’s for DSP-DSP
systems-DSP system design- Integrated circuit design-MOS transistors-
MOS logic-VLSI process technologies-Trends in CMOS technologies.
DIGITAL SIGNAL PROCESSING 9 Hours
Digital signal processing-Sampling of analog signals-Selection of sample
frequency-Signal processing systems-Frequency response - Transfer
functions - Signal flow graphs- Filter structures- Adaptive DSP algorithms
-DFT-The Discrete Fourier Transform - FFT-The Fast Fourier Transform
Algorithm - Image coding - Discrete cosine transforms.
DIGITAL FILTERS AND FINITE WORD LENGTH
EFFECTS
9 Hours
FIR filters - FIR filter structures- FIR chips - IIR filters - Specifications of
IIR filters - Mapping of analog transfer functions - Mapping of analog
filter structures -Multirate systems - Interpolation with an integer factor L -
Sampling rate change with a ratio L/M - Multirate filters - Finite word
length effects -Parasitic oscillations, Scaling of signal levels, Round-off
noise, Measuring round-off noise, Coefficient sensitivity, Sensitivity and
noise.
179
Signature of the Chairman BOS EEE
DSP ARCHITECTURES AND SYNTHESIS OF DSP
ARCHITECTURES
9 Hours
DSP system architectures - Standard DSP architecture - Ideal DSP
architectures - Multiprocessors and multicomputer - Systolic and Wave
front arrays - Shared memory architectures. Mapping of DSP
algorithms onto hardware - Implementation based on complex PEs -
Shared memory architecture with Bit – serial PEs.
ARITHMETIC UNITS AND INTEGRATED CIRCUIT
DESIGN
9 Hours
Conventional number system - Redundant Number system, Residue
Number System. Bit-parallel and Bit-Serial arithmetic, Basic shift
accumulator, Reducing the memory size, Complex multipliers, Improved
shift-accumulator. Layout of VLSI circuits, FFT processor, DCT processor
and Interpolator as case studies.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Lars Wanhammer, ―DSP Integrated Circuits‖, 1st Edition, Academic
Press, 1999, New York.
2. Robert J. Schilling, ―Fundamentals of Digital Signal Processing
using MATLAB‖, 2nd
Edition, Pearson Education, 2010.
3. A.V.Oppenheim et.al, ―Discrete-time Signal Processing‖, 3rd
Edition, Pearson Education, 2009.
4. Emmanuel C. Ifeachor, Barrie W. Jervis, ―Digital signal processing
– A practical approach‖, 2nd
Edition, Pearson Education, 2001.
5. KeshabK.Parhi, ―VLSI digital Signal Processing Systems design and
Implementation‖, 1st Edition, Wiley India, 2010.
180
Signature of the Chairman BOS EEE
P14ESTE16 WIRELESS AND MOBILE
COMMUNICATION
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: To study the technologies used in wireless communication and
overall GSM cellular concept.
CO2: To understand the various wireless networks.
CO3: To study the different diversity techniques.
PRE-REQUISITE
1. NIL
INTRODUCTION TO WIRELESS COMMUNICATION 9 Hours
Wireless Transmission-signal propagation-spread spectrum-Satellite
Networks- Capacity Allocation-FAMA-DAMA-MAC.
MOBILE NETWORKS 9 Hours
Cellular Wireless Networks-GSM-Architecture-Protocols-Connection
Establishment - Frequency Allocation-Routing-Handover-Security-GPRS.
WIRELESS NETWORKS 9 Hours
Wireless LAN-IEEE 802.11 Standard-Architecture-Services-Architecture
of Ad. Hoc Network - HiperLan-Blue Tooth technology and its
applications.
ROUTING 9 Hours
Mobile IP-DHCP- AdHoc Networks-Proactive and Reactive Routing
Protocols with applications- features- Multicast Routing algorithms.
TRANSPORT AND APPLICATION LAYERS 9 Hours
TCP over Adhoc Networks-WAP-Architecture-WWW Programming
Model-WDP - WTLS-WTP-WSP-WAE-WTA Architecture-WML-WML
scripts.
Theory:45 Hrs Total: 45 Hrs
181
Signature of the Chairman BOS EEE
REFERENCES
1 KavehPahlavan, PrasanthKrishnamoorthy, ―Principles of Wireless
Networks‖, Prentice Hall of India, 2003
2 UweHansmann, LotharMerk, Martin S. Nicklons and Thomas
Stober, ―Principles of Mobile computing‖, Springer, 2003, New
York.
3 C.K.Toh, ―AdHoc mobile wireless networks‖, Prentice Hall, 2007.
4 Charles E. Perkins, ―Adhoc Networking‖, Addison-Wesley, 2001.
5 Jochen Schiller, ―Mobile communications‖, 2nd
Edition,
PHI/Pearson Education, 2003.
6 William Stallings, ―Wireless communications and Networks‖,
PHI/Pearson Education, 2009.
182
Signature of the Chairman BOS EEE
P14ESTE17 OPERATING SYSTEMS L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1:Acquire knowledge about the role of various kernel objects used to
manage different applications in a multi user, multi-tasking
environment.
CO2: Learn the various techniques to achieve synchronization and provide
solutions for concurrency issues in real – time system design.
CO3: Outline the disk organization and file system structure, concepts and
accessing techniques for virtual memory management in operating
systems.
PRE-REQUISITE
1. NIL
INTRODUCTION 9 Hours
Operating System Structure – Operating System Operations – Process
Management – Memory Management – Storage Management – Protection
and Security – Distributed Systems – Computing Environments – System
Structures: Operating System Services – User Operating System Interface
– System Calls – Types of System Calls – System Programs – Process
Concept: Process Scheduling – Operations on Processes – Inter-process
Communication.
MULTITHREADED PROGRAMMING 9 Hours
Overview – Multithreading Models – Threading Issues – Process
Scheduling: Basic Concepts – Scheduling Criteria – Scheduling
Algorithms – Multiple-Processor Scheduling – Synchronization – The
Critical-Section Problem – Peterson’s Solution – Synchronization
Hardware – Semaphores – Classic problems of Synchronization –
Monitors.
DEADLOCKS 9 Hours
System Model – Deadlock Characterization – Methods for Handling
183
Signature of the Chairman BOS EEE
Deadlocks – Deadlock Prevention – Deadlock Avoidance – Deadlock
Detection – Recovery from Deadlock – Memory Management Strategies:
Swapping – Contiguous Memory Allocation – Paging – Structure of the
Page Table – Segmentation.
VIRTUAL MEMORY MANAGEMENT 9 Hours
Demand Paging – Copy on Write – Page Replacement – Allocation of
Frames – Thrashing – File System: File Concept – Access Methods –
Directory Structure – File Sharing – Protection.
IMPLEMENTING FILE SYSTEMS 9 Hours
File System Structure – File System Implementation – Directory
Implementation – Allocation Methods – Free-space Management -
Secondary Storage Structure: Disk Structure – Disk Scheduling – Disk
Management – Swap-Space Management. Case Study: The Linux System.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Abraham Silberschatz, Peter Baer Galvin and Greg Gagne,
―Operating System Principles‖, 9th Edition, John Wiley & Sons,
2012.
2. Harvey M. Deitel, ―Operating Systems‖, 6th Edition, Pearson
Education,2009.
3. Andrew S. Tanenbaum, ―Modern Operating Systems‖, 4th Edition,
Prentice Hall of India, 2014.
4. William Stallings, ―Operating System‖, 8th Edition, Prentice Hall of
India, 2014.

184
Signature of the Chairman BOS EEE
P14ESTE18 VLSI DESIGN L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Acquire the depth of concepts in fabrication techniques in CMOS.
CO2: Acquire the electrical properties of CMOS and layout design rules.
CO3: Realize the testing of VLSI circuits and logic design of digital
circuits.
PRE-REQUISITE
1. Digital Design
VLSI DESIGN METHODOLOGY & MOS
TECHNOLOGY
9 Hours
VLSI Design process — Architectural Design — Logical design —
Physical design — Layout styles — Full custom — Semicustom
approaches - An overview of wafer fabrication — Wafer processing —
Oxidation — Patterning — Diffusion — Ion implantation — Deposition
— Silicon gate NMOS process — CMOS processes — nWell — pWell —
Twintub — Silicon on insulator.
ELECTRICAL PROPERTIES OF MOS AND CMOS
CIRUITS
9 Hours
MOS enhancement transistor — PMOS enhancement transistor —
Threshold voltage — Threshold voltage equations — MOS device
equations — Basic DC equations — Second order effects — MOS
modules — Small signal AC characteristics — NMOS inverter— Steered
Input to an NMOS inverter — Depletion mode and enhancement mode
pull-ups — CMOS inverter — DC characteristics — Inverter delay —
Pass transistor — Transmission gate.
MOS AND CMOS CIRCUIT DESIGN PROCESSES 9 Hours
CMOS process enhancements — Interconnect - Circuit elements - Latch
up – Latch up prevention techniques - Need for Layout design rules —
Mead conway design rules for the silicon gate NMOS process — CMOS
185
Signature of the Chairman BOS EEE
nWellpWell design rules — Simple Layout examples — Sheet resistance
— Area capacitance — Wiring Capacitance — Drive large capacitive
loads.
LOGIC DESIGN 9 Hours
Switch Logic — Pass Transistor and transmission gate — Gate Logic —
Inverter — Two input NAND gate — NOR gate — Other forms of CMOS
logic — Dynamic CMOS logic — Clocked CMOS logic — Precharged
domino CMOS logic — Structured design — Simple combinational logic
design examples — Parity generator — Multiplexers— locked sequential
circuits —Two phase clocking — Charge storage — Dynamic register
element — NMOS and CMOS — Dynamic shift register — Semi static
register — JK flip flop circuit.
TESTING 9 Hours
Importance of testing – Boundary – Scan Test – faults – fault simulation –
Automatic Test – Pattern Generation – IDDQ Test – Built in Self Test – A
simple test example.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Douglas A. Pucknell, K. Eshragian, ―Basic VLSI Design‖, 3rd
Edition,PrenticeHallof India,2009, New Delhi.
2. Neil.
H.E.Weste,KamaranEshraghian,―PrinciplesofCMOSVLSIDesign‖,
2nd
Edition, Addison WesleyPublications,2005.
3. Amar Mukherjee, ―Introduction to NMOS and CMOS VLSI system
design‖, 2nd
Edition, Prentice Hall, 2002.
4. Wayne Wolf, ―Modern VLSI Design: Systems on
Si1icon‖,3rd
Edition, Pearson Education, 2002.
5. EugeneD.Fabricius,―IntroductiontoVLSIDesign‖, 1st Edition,
TataMcGrawHill, 1990, New Delhi.

186
Signature of the Chairman BOS EEE
187
Signature of the Chairman BOS EEE
P14ESTE19 MICRO ELECTRO MECHANICAL
SYSTEMS
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Apply knowledge of micro fabrication techniques and applications
to the design and manufacturing of an MEMS device or a
Microsystem.
CO2: Know the major classes, components, and applications of MEMS
devices/systems and to demonstrate an understanding of the
fundamental principles behind the operation of these
devices/systems.
CO3:Summarize the major classes, components, and applications of
MEMS devices/systems and to demonstrate an understanding of the
fundamental principles behind the operation of these
devices/systems.
PRE-REQUISITE
1. NIL
MEMS DEVICES 9 Hours
Piezoresistive pressure sensor- Piezoresistive Accelerometer - Capacitive
Pressure Sensor-Accelerometer and Microphone - Resonant Sensor and
Vibratory Gyroscope - Micro Mechanical Electric and Optical Switches-
Micro Mechanical Motors - Micro Electro Mechanical Systems Analysis
and Design of MEMS Devices- MEMS applied to rehabilitation
engineering- Nano Sensors.
BASIC MECHANICS OF BEAM AND DIAPHRAGM
STRUCTURES
9 Hours
Stress and Strain- Stress and Strain of Beam Structures-Vibration
Frequency by Energy Methods Vibration Modes and the Buckling of a
Beam- Damped and forced vibration-Basic Mechanics of Diaphragms –
Problems.
188
Signature of the Chairman BOS EEE
AIR DAMPING AND ELECTRO STATIC ACTUATION 9 Hours
Drag Effect of a Fluid- Squeeze-film Air Damping-Damping of Perforated
Thick Plates-Slide-film Air Damping- Damping in Rarefied –Air
Problems- Electro static Forces-Electrostatic Driving of Mechanical
Actuator Step and Alternative-Driving –Problems.
CAPACITIVE SENSING AND EFFECTS OF
ELECTRICAL EXCITATION
9 Hours
Capacitive Sensing Schemes- Effects of Electrical Excitation: Static
Signal- Effects of Electrical Excitation: Step Signal –Effects of Electrical
Excitation: Pulse Signal –Problems.
PIEZO RESISTIVE SENSING 9 Hours
Piezoresistive Effect of Silicon-Coordinate Transformation of Second
Rank Tensors-Coordinate Transformation of Piezoresistive Coefficient –
Piezoresistive Sensing Elements-PolysiliconPiezoresistive Sensing
Elements-Analyzing-Piezo resistive Bridge-Problems.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. MinhangBao, “Analysis and design principles of MEMS devices‖,
Elsevier Publications, 2005, USA.
2. NadimMaluf and Kirt Williams, ―An Introduction to Micro Electro
Mechanical Systems Engineering, Second Edition‖, Artech House
Publishers, June 2004, USA.
3. Gabriel M. Rebeiz , ―RF MEMS: Theory, Design, and Technology‖,
1st Edition, Wiley, 2004, UK.
4. John A. Pelesko and David H. Bernstein, ― Modeling MEMS and
NEMS‖, CRC Press, 2002,UK
189
Signature of the Chairman BOS EEE
P14ESTE20 SYSTEM SIMULATION AND
MODELING
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Outline the role of modelling and simulation in the systems
engineering process.
CO2: Describe key development factors associated with developing
complex models and simulations.
CO3: Distinguish different types of models and simulations and the
different ways in which they are used.
PRE-REQUISITE
1. Control System
SYSTEM AND SYSTEM ENVIRONMENT 9 Hours
Concept of a system-continuous and discrete systems – models of a system
–modeling approaches – advantages and disadvantages of simulation
systems-steps in simulation study-point estimates, confidence interval.
PROBABILITY CONCEPTS IN SIMULATION 9 Hours
Random number generation-mid square-mid product method-constant
multiplier method-additive congruental method-linear congruential method
test for random numbers-the Chi square test – the Kolmogrov- Smimov
test – Runs test-Gaps test-Random variable generation – Gaussian,
Exponential, Poisson , Uniform, Weibull – Empirical and Normal
distribution.
STATE SPACE BASED MODELS 9 Hours
Markovian-Non Markovian models – Discrete and Continuous time
Markov Chains – Markov reward models – Semi Markov models –
Markov regenerative models.
NON STATE SPACE METHODS 9 Hours
Performance models – queuing models – task precedence graphs –
Dependability models – Reliability graphs – Fault tress.
190
Signature of the Chairman BOS EEE
PETRI NET MODEL 9 Hours
Finite state Automata – Petri nets – Stochastic Petri nets – Stochastic
Reward nets – Colored Petri nets – Fluid Petri nets.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. Geoffrey Gordon,‖Systems Simulation‖, 2nd
Edition, Prentice Hall of
India, 1992.
2. Kishore.S.Trivedi, ―Probability and Statistics with Reliability,
Queuing and Computer Science Applications‖, 2nd
Edition, John
Wiley, 2002.
3. GotrifedB.S.,‖Elements of Stochastic Process Simulation‖, Prentice
Hall, 1984.
4. Arson J.S.,Banks J.C., and Nelson B.L., ―Discrete Event Systems
Simulation‖, Prentice Hall of India, 1996.
5. AjmoneMarsan M., KartsonDF., Conte G. and Donatelli S.,
―Modeling with Generalized Stochastic Petri Nets‖, Willey, New
York, 1998.
6. Kleinrock L., ―Queueing Systems Theory‖,Vol.I, Kluwer Academic
Press, 1995.
191
Signature of the Chairman BOS EEE
P14ESTE21 DATA COMMUNICATION AND
NETWORKS
L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Describe the various components of Network.
CO2: Outline the various OSI layers.
CO3: Distinguish the various application protocol.
PRE-REQUISITE
1. NIL
INTRODUCTION TO NETWORK COMPONENTS 9 Hours
Components of network – Topologies – WAN / LAN – OSI – ISO layered
Architecture – digital Modulation and demodulation techniques – Bit error
rates – Line coding – Error correcting codes.
DATA LINK LAYER 9 Hours
Design issues – CRC technique and sliding window techniques –
Performance analysis of sliding window techniques – Framing formats –
Case Study – HDLC protocols – Medium access control – CSMA / CD –
Token ring and token bus – FDDI – Wireless LAN – Performance analysis
of MAC protocols – Bridges.
NETWORK LAYER 9 Hours
Circuit switching – packet switching – Design issues – IP addressing and
IP datagram – Routers and gateways – Routing –Subnetting – CIDR –
ICMP – ARP – RARP – basics of Ipv6 – QoS.
TRANSPORT LAYER 9 Hours
TCP and UDP – Error handling and flow control – Congestion control –
TCP Retransmission – Timeout – Socket Abstraction.
APPLICATION SERVICES 9 Hours
Simple Mail Transfer Protocol (SMTP) – Secure File Transfer Protocols
(SFTP), telnet, the World Wide Web (WWW) - Hypertext Transfer
192
Signature of the Chairman BOS EEE
Protocol (HTTP) - Domain name service (DNS), Security, Multimedia
applications - DHCP.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. William Stallings, ―Data and Computer Communications‖, 8th
Edition, Prentice Hall,2003.
2. Larry Peterson, Bruce S Davie ―Computer Networks: A Systems
Approach‖, 5th Edition, Morgan Kaufmann Publishers, 1999.
3. James F Kurose, ―Computer Networking: A Top – Down Approach
Featuring the Internet‖, 6th Edition, Addison Wesley, 2002.
4. W.Richard Stevens and Gary R Wright, ―TCP / IP Illustrated‖,
Addison Wesley, Volume 1 & 2, 2001.
5. Douglas E Corner, ―Internetworking with TCP / IP‖, Volume 1 & 2,
2000.
193
Signature of the Chairman BOS EEE
P14ESTE22 ASIC AND FPGA DESIGN L T P C
3 0 0 3
COURSE OUTCOMES
After successful completion of this course, the students should be able to
CO1: Acquire the concepts of CMOS and ASIC library and I/O cells.
CO2: Know the internal architecture of ASIC family.
CO3: Acquire the knowledge of floor planning, placement, routing and
HDL synthesis.
PRE-REQUISITE
1. NIL
INTRODUCTION TO ASICS, CMOS LOGIC AND ASIC
LIBRARY DESIGN
9 Hours
Types of ASICs – Design Flow – CMOS transistors, CMOS design rules –
Combinational Logic Cell – Sequential logic cell – Data path logic cell –
Transistors as Resistors –Transistor Parasitic Capacitance – Logical effort
– Library cell design – Library architecture.
PROGRAMMABLE ASICS, PROGRAMMABLE ASIC
LOGIC CELLS AND PROGRAMMBALE ASIC I/O
CELLS
9 Hours
Anti fuse – static RAM – EPROM and EEPROM technology – PREP
bench marks –Actel ACT – Xilinx LCA – Altera FLEX – Altera MAX DC
& AC inputs and outputs –Clock and power inputs – Xilinx I/O blocks.
PROGRAMMABLE ASIC INTERCONNECT,
PROGRAMMABLE ASIC DESIGN SOFTWARE AND
LOW LEVEL DESIGN ENTRY
9 Hours
Actel ACT – Xilinx LCA – Xilinx EPLD – Altera MAX 5000 and 7000 –
Altera MAX 9000 Altera FLEX – Design systems – Logic Synthesis –
Half Gate ASIC – Schematic entry – Low level design language – PLA
tools – EDIF – CFI design representation.
194
Signature of the Chairman BOS EEE
LOGIC SYNTHESIS, SIMULATION AND TESTING 9 Hours
Verilog and logic synthesis – VHDL and logic synthesis - Types of
simulation – Boundary scan test – Fault simulation – Automatic test
pattern generation.
ASIC CONSTRUCTION, FLOOR PLANNING,
PLACEMENT AND ROUTING
9 Hours
System partition – FPGA partitioning – partitioning methods – floor
planning – placement – physical design flow – global routing – detailed
routing – special routing – circuit extraction – DRC.
Theory:45 Hrs Total: 45 Hrs
REFERENCES
1. M.J.S. SMITH, ―Application – Specific Integrated Circuits‖, 1st
Edition, Addison Wesley, 2003.
2. Andrew Brown, ―VLSI Circuits and Systems in Silicon‖, McGraw
Hill, 1991.
3. S.D.Brown, R.J.Francis, J.Rox, Z.G.Uranesic, ―Field Programmable
Gate Arrays‖, Kluever Academic Publishers, 1992.
4. Mohammed Ismail and Terri Fiez, ―Analog VLSI Signal and
Information Processing‖, McGraw Hill, 1994.
5. S.Y. Kung, H.J.Whilo House, T.Kailath, ―VLSI and Modern Signal
Processing‖, Prentice Hall, 1985.
6. Jose E.France, YannisTsividis, ―Design of Analog – Digital VLSI
Circuits for Telecommunication and Signal Processing‖, Prentice
Hall, 1994
195
Signature of the Chairman BOS EEE
ONE CREDIT
COURSES
196
Signature of the Chairman BOS EEE
P14ESIN01 Internet of Things
Introduction – Concepts behind the Internet of Things. - The IoT
paradigm - Smart objects - Bits and atoms - Goal orientation -
Convergence of technologies
Technologies behind the Internet of Things. - RFID + NFC - Wireless
networks + WSN - RTLS + GPS - Agents + Multiagent systems
Theory:15 Hrs Total: 15 Hrs
197
Signature of the Chairman BOS EEE
P14ESIN02 EMBEDDED SYSTEM IN CARS
Traction control system – Cruise control system – electronic control of
automatic transmission –antilock braking system –electronic suspension
system – working of airbag and role of MEMS in airbag systems –
centralized door locking system –climate control of cars.
Theory:15 Hrs Total: 15 Hrs
198
Signature of the Chairman BOS EEE
P14ESIN03 ADVANCED COMMUNICATION
PROTOCOLS
Basic need of communication protocols- I2C protocol – RS232 protocol –
GSM/CDMA-wireless protocols – programs -3G network.
Theory:15 Hrs Total: 15 Hrs
199
Signature of the Chairman BOS EEE
P14ESIN04 PLC Based Automation in Industries
Module I
Introduction to Programmable Logic Controller PLC evolution – hardwire
control system compared with PLC system - advantages of PLCs – criteria
for selection of suitable PLC - Block diagram of PLC – principle of
operation – CPU – memory organization – I/O modules – Input types –
Logic, Analog – pulse train – expansion modules – power supplies to PLC
– modular PLCs - list of various PLCs available
Module II
Input and Output Modules Input Modules Discrete input module – AC
input module – DC input module – sinking and sourcing – sensor input –
special input modules – Sensors – limit switch, reed switch, photo electric
sensor, inductive proximity sensor – Input Addressing scheme in
important commercial PLCs. Output modules Discrete output module –
TTL output module – Relay output – Isolated output module – surge
suppression in output – Analog outputs – open collector output. Output
Addressing scheme in important commercial PLCs.
Theory:15 Hrs Total: 15 Hrs