an introducion to signal analysis - pages personnelles telecom
TRANSCRIPT
An introducionto signal analysis
TELECOM Bretagne, Master of science MTS-102B
Brest 11-16 octobre 2011
SommaireIntroduction
1 Introduction
2 Basic concepts
Discrete signals and systems
Analog signals and systems
3 Further results
4 Conclusion
2/22 MsC 2013 MsC - september 2013

IntroductionIntroduction ◮ Contexte
� Context : advent of digital techniques to manipulate analog sources such as
audio or images.� In signal analysis, the signal is described and manipulated in a convenient way
to perform tasks such as filtering, source seperation or denoising.� Areas of application : speech and audio processing (compression, denoising,
watermarking, ...), telecommunications, astronomy, radar and sonar, healthcare
(ECG, imaging, ...), geology (earthquake surveillance), finance, biology, . . .� Most of this course is based on the first part of the book Signal analysis, by
Athanasios Papoulis, Mc Graw Hill 1977.
� Other references• S. K. Mitra, Digital Signal Processing, a computer-based
approach, Third edition, Mcgraw hill, 2005 ;• J. G. Proakis and D. K. Manolakis, Digital Signal Processing, 4th
edition, Prentice Hall, 2006 ;• A. V. Oppenheim and R. W. Schafer, Discrete-Time Signal
Processing, Third edition, Prentice Hall, 2009.
3/22 MsC 2013 MsC - september 2013
Goals of the courseIntroduction ◮ Goals of the course
� Understand basics of analog and discrete signals and systems modelling and in
particular concepts such as causality, periodicity, time and frequency
representation, . . .
� Know what a filter is
� Be able to calculate and use the z-transform and the Fourier transform
� Understand sampling principles
� Be able to manipulate above concepts to solve simple problems.
4/22 MsC 2013 MsC - september 2013
ScheduleIntroduction ◮ organization
Course : 12 hours, roughly organized as follows :
� 3 hours classes
� 3 hours exercices
� 3 hours practical training (Matlab programming)
Exam : 1 hour (no document)
5/22 MsC 2013 MsC - september 2013
Table of contentsIntroduction ◮ organization
1 Introduction
2 Basic concepts
Discrete signals and systems
Analog signals and systems
3 Further results
4 Conclusion
6/22 MsC 2013 MsC - september 2013
SommaireBasic concepts
1 Introduction
2 Basic concepts
Discrete signals and systems
Analog signals and systems
3 Further results
4 Conclusion
7/22 MsC 2013 MsC - september 2013
Discrete signals and systemsBasic concepts ◮ Discrete signals and systems
� Discrete signals : u = (un)n∈Z (un is a shorthand for u(n))
� Examples
• step sequence : ε = (εn = 1IN(n) = 1 if n ≥ 0, 0 otherwise)n∈Z ;• delta sequence : δ0 = (δ0,n = 1 if n = 0, 0 otherwise)n∈Z
δk = (δk,n = δ0,n−k)n∈Z. Thus, u = (un)n∈Z can be rewritten as
u = ∑n∈Z unδn
� Discrete systems : L(u) = v, u = (un)n∈ZL
−→ v = (vn)n∈Z.
� Examples
• delay operator : [L(u)]n = un−1, often denoted by z−1 :
(z−1u)n = un−1• multiplier : [L(u)]n = aun• time invariant systems : L(z−ku) = z−k[L(u)]• linear systems : L(au+ bv) = aL(u)+ bL(v).
� Exercice : letting L(u) = v, are the following systems linear? time invariant ?
vn = |un|, vn = nun, vn = sign(un), vn = un +2un−1.
8/22 MsC 2013 MsC - september 2013
Impulse response and filtersBasic concepts ◮ Impulse response and filters
� Impulse response : L(δ) = h
� Causal systems : hn = 0 for n < 0 (n ≤ 0 for strict causality)
� Exercices :
• impulse response of L with [L(u)]n = ∑k2k=k1
akun−k ? causality ?• impulse response of L causal with L(u) = v and vn −αvn−1 = un ?
� Filters : a filter is a linear, time invariant system
� Block representation for delays, multipliers and filters
� Exercice : for the filters in the above exercices, give the block representations
9/22 MsC 2013 MsC - september 2013
ConvolutionBasic concepts ◮ Convolution
� If L is a filter with impulse response L(δ) = h = ∑k∈Z hkδk,
[L(u)]n = [L(∑m∈Z umδm)]n= [∑m∈Z umL(δm)]n= ∑m∈Z um[z
−mL(δ0)]n= ∑m∈Z um[∑k∈Z hk−mδk]n= ∑m∈Z umhn−m = ∑m∈Z hmun−m
� Notation : x∗y = ∑n∈Z (∑m∈Z xmyn−m)δn. Thus, for a filter L, if
L(δ) = h = ∑k∈Z hkδk, then L(u) = h∗u = u∗h
� Exercices Compute h∗u for
• u = ε− z−2ε and h causal with hn = αn for n ≥ 0.• un = α|n| and h = u
10/22 MsC 2013 MsC - september 2013
z-transformBasic concepts ◮ z-transform
� Let u = ∑k ukδk. We define the z-transform of u by U(z) = ∑k ukz−k
� Exercice : compute the z-transform of ε, δk and of h when (i) h = ∑k2
k=k1akδk
(ii) h is causal with hn = αn for n ≥ 0 (iii) hn −ahn−1 −bhn−2 = δ0,n for n ∈ Z.
� z-transform and convolution : if L is a filter with impulse response
L(δ) = h = ∑k∈Z hkδk,
[L(u)](z) = ∑n∈Z [∑m∈Z hmun−m]z−n
= ∑m,n∈Z(hmz−m)(un−mz−(n−m))
= ∑m∈Z hmz−m ∑k∈Z ukz−k = H(z)U(z)
� if signal u goes through filters with impulse responses h1 and h2 successively,
the z-transform of the system output is H1(z)H2(z)U(z).
� It is often simpler to use the z-transforms to compute convolutions than to
perform convolutions directly.
� Exercice : compute in two different ways L(u) when h = ε and u = ∑k≥0 αkδk,
with |α|< 1.
11/22 MsC 2013 MsC - september 2013
Analog signals and systemsBasic concepts ◮ Analog signals and systems
� Analog (time continuous) signals : u = (ut)t∈R (notation : ut = u(t)).� Examples
• step function : ε(t) = 1IR+(t) ;• sign function : sgn(t) =−1IR−(t)+ 1IR+(t) ;• rectangular pulse : Πa(t) = 1I[−a/2,a/2](t)
• sinc(t) =sin(πt)
πt• delta function
− generalized functions : ϕ : f →< ϕ, f >∈ R, often denoted by
”∫
f (t)ϕ(t)dt ”.− δ : f → f (0). f continuous →< δ, f >= limn→∞
∫nΠ1/n(t)f (t)dt .
� Analog systems L(u) = v, where u and v are analog signals.� Examples : linear systems (L(au+bv) = aL(u)+bL(v)), time invariant
systems ([L(v)](t) = [L(u)](t− τ) where vt = ut−τ), causal systems, differential
equations.� Exercice : are these systems linear, time invariant ? [L(u)]t = |ut|, t2ut, ut−a.
12/22 MsC 2013 MsC - september 2013
FiltersBasic concepts ◮ Filters
� Definition : linear and time invariant systems.� impulse response : ht = [L(δ)]t.� Exercices Compute h∗u for
• ut = εt − εt−a and (i) h causal with ht = e−αt1IR+(t) (ii) h = u• h = δ
� Convolution. If L(u) = v, letting u ≈ ∑k uk∆1I[k∆,(k+1)∆[,
[L(u)]n = lim∆→0 ∑k uk∆[L(1I[k∆,(k+1)∆[)]t
= lim∆→0 ∑k ∆uk∆[L(1
∆1I[0,∆[)]t−k∆
=∫R
uτht−τdτ =∫R
ut−τhτdτ
since lim∆→0[L(1
∆1I[0,∆[)]→ L(δ) = h and the sum tends to an integral.
� Notation : L(u) = h∗u = u∗h.� Exercices : letting L(u) = v, calculate the impulse response h of the causal
system when v′+αv = u, and vt for ut = (1/a)[ε(t)− ε(t−a)] and
ut = (1/a)e−t/a1IR+(t), with v0 = 0.
13/22 MsC 2013 MsC - september 2013
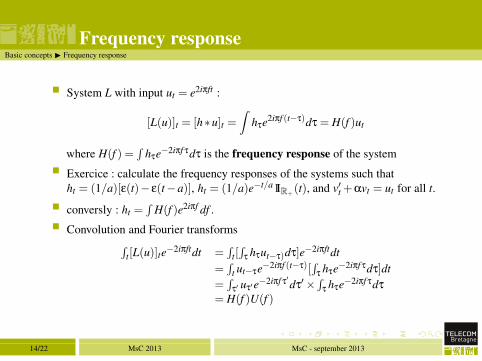
Frequency responseBasic concepts ◮ Frequency response
� System L with input ut = e2iπft :
[L(u)]t = [h∗u]t =
∫hτe2iπf (t−τ)dτ = H(f )ut
where H(f ) =∫
hτe−2iπf τdτ is the frequency response of the system
� Exercice : calculate the frequency responses of the systems such that
ht = (1/a)[ε(t)− ε(t−a)], ht = (1/a)e−t/a1IR+(t), and v′t +αvt = ut for all t.
� conversly : ht =∫
H(f )e2iπf df .
� Convolution and Fourier transforms
∫t[L(u)]te
−2iπftdt =∫
t[∫
τ hτut−τ)dτ]e−2iπftdt
=∫
t ut−τe−2iπf (t−τ)[∫
τ hτe−2iπf τdτ]dt
=∫
τ′ uτ′e−2iπf τ′dτ′×
∫τ hτe−2iπf τdτ
= H(f )U(f )
14/22 MsC 2013 MsC - september 2013
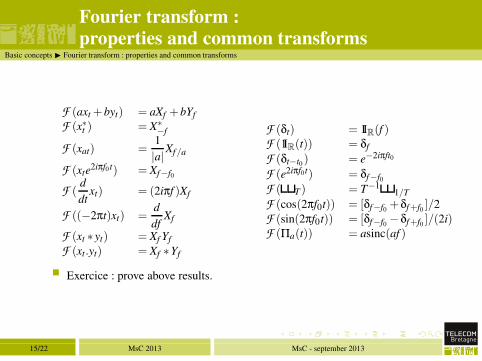
Fourier transform :
properties and common transformsBasic concepts ◮ Fourier transform : properties and common transforms
F (axt +byt) = aXf +bYf
F (x∗t ) = X∗−f
F (xat) =1
|a|Xf/a
F (xte2iπf0 t) = Xf−f0
F (d
dtxt) = (2iπf )Xf
F ((−2πt)xt) =d
dfXf
F (xt ∗yt) = Xf Yf
F (xt.yt) = Xf ∗Yf
F (δt) = 1IR(f )F (1IR(t)) = δf
F (δt−t0 ) = e−2iπft0
F (e2iπf0t) = δf−f0
F ( T) = T−11/T
F (cos(2πf0t)) = [δf−f0 +δf+f0 ]/2
F (sin(2πf0t)) = [δf−f0 −δf+f0 ]/(2i)F (Πa(t)) = asinc(af )
� Exercice : prove above results.
15/22 MsC 2013 MsC - september 2013
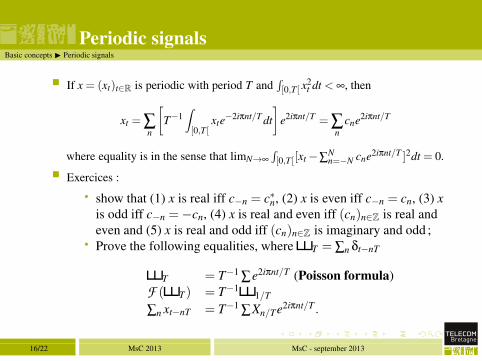
Periodic signalsBasic concepts ◮ Periodic signals
� If x = (xt)t∈R is periodic with period T and∫[0,T[ x
2t dt < ∞, then
xt =∑n
[
T−1∫[0,T[
xte−2iπnt/T dt
]
e2iπnt/T = ∑n
cne2iπnt/T
where equality is in the sense that limN→∞∫[0,T[[xt −∑N
n=−N cne2iπnt/T ]2dt = 0.
� Exercices :
• show that (1) x is real iff c−n = c∗n, (2) x is even iff c−n = cn, (3) x
is odd iff c−n =−cn, (4) x is real and even iff (cn)n∈Z is real and
even and (5) x is real and odd iff (cn)n∈Z is imaginary and odd ;• Prove the following equalities, where T = ∑n δt−nT
T = T−1 ∑e2iπnt/T (Poisson formula)
F ( T) = T−11/T
∑n xt−nT = T−1 ∑Xn/Te2iπnt/T .
16/22 MsC 2013 MsC - september 2013
SommaireFurther results
1 Introduction
2 Basic concepts
Discrete signals and systems
Analog signals and systems
3 Further results
4 Conclusion
17/22 MsC 2013 MsC - september 2013
z-transformFurther results ◮ z-transform
� x = (xn)n∈Z → X(z) = ∑n xnz−n.� ∑n xnz−n converges in a ring r1 < z < r2 where r1,2 depend on xn as n →±∞.� Exercice : study and calculate Z[∑n≥0 anδn], Z[∑n6=0 bnδn],Z[∑n≥0 nanδn]. For
L(x) = y, calculate the transfer function if yn +∑pk=1 akyn−k = ∑
ql=1 blxn−l.
� Exercice (inversion) : Calculate Z−1[H(z)] forz
z−a,
z+2
2z2 −7z+3, zkX(z).
� Connection with Fourier transform : [X(z)]z=e2iπf = ∑n xne−2iπnf = F (x)(z = e2iπfT if T 6= 1).
� Plot the magnitude of the frequency response for H(z) = 1/(1−az−1) where
a = reiφ and 0 < r < 1, 1− z−k and ∑k−1n=0 z−n.
� Energy spectrum : SX(f ) = |X(e2iπf )|2 = [X(z)X∗(1/z)]z=e2iπf where X∗(.) is X
with conjugated coefficients.� Exercices : show that for a rational system H(z)H∗(1/z) is a function of z+1/z
and that |H(e2iπf )|2 is a function of cos(2πf ). For
|H(e2iπf )|2 =5−4cos(2πf )
10−6cos(2πf ), find H(z). Show that H(z) = ∏K
k=1
z∗k − z−1
1− zkz−1is
the transfer function of an allpass filter.
18/22 MsC 2013 MsC - september 2013
Fourier analysisFurther results ◮ Fourier analysis
� The Fourier transform and its inverse are defined as Cauchy principal values
limit integrals ”limA→∞∫ A−A ...”. If X(f ) =
∫ ∞−∞ xte
2iπftdt,∫ A−A X(f )e2iπftdt =
∫ A−A
∫ ∞−∞ e2iπf (t−τ)dfxτdτ
=∫ ∞−∞ sinc[A(t− τ)]xτdτ
If x is contionuous at t, the right hand side tends to xt as A → ∞.� Discontinuity points and Gibbs phenomenon� for real signals X−f = X∗
f
� Exercice : calculate the Fourier transform of xt = 1/t, e−a|t|, f (t)cos(2πf0t).� Parseval’s formula :
∫xty
∗t dt =
∫Xf Y∗
f df
� Energy theorem :∫|xt|
2dt =∫|Xf |
2df
� Exercice : prove above results ; calculate∫ ( sinat
t
)2
dt.
� Exercice : Show that F [εt] = (1/2)δf +1
2iπfand calculate
∫ t−∞ xτdτ as a
function of Xf .
19/22 MsC 2013 MsC - september 2013
Sampling and quantizationFurther results ◮ Sampling and quantization
� Sampling : (xat )t∈R → (xs
nT)n∈Z.
� Express xst using T and calculate Xs
f
� If Xaf = Xa
f 1I[−B,B](f ), express Xaf and xa
t from Xsf and (xs
nT )n∈Z respectively.
� Resampling
� Quantization : a signal x = (xsn)n∈Z, where xn ∈ [−A,A] and xn ∼ p(.) is
quantized uniformly over K bits.
• Calculate the mean square error E[(xn − xqn)2] caused by
quantization, where xqn is the quantized xn.
• Application : xn is uniform over [−A,A].
20/22 MsC 2013 MsC - september 2013
SommaireConclusion
1 Introduction
2 Basic concepts
Discrete signals and systems
Analog signals and systems
3 Further results
4 Conclusion
21/22 MsC 2013 MsC - september 2013
ConclusionConclusion
� We have introduced discrete and continuous time signals and systems
� z-tranform and Fourier analysis of signals and systems have been considered
� Connection with random signals will be developped in next courses.
22/22 MsC 2013 MsC - september 2013