reporte final residencia oscar santana2
TRANSCRIPT
INSTITUTO TECNOLÓGICO DE LA PAZ
DEPARTAMENTO METAL-MECÁNICA
RESIDENCIA PROFESIONAL
“CONTROL DE SERVOMECANISMOS BASADO EN LA TARJETA PCL-711B”
PRESENTA
OSCAR SANTANA JAVIER
LA PAZ, BAJA CALIFORNIA SUR, DICIEMBRE 2009.

1
RESUMEN
Este informe final de residencia profesional presenta el control de dos
servomecanismos: Un motor-tacogenerador y un sistema barra-bola, mediante la tarjeta
de adquisición de datos Advantech PCL-711B. Además, el modelo matemático de cada
servomecanismo y la identificación de parámetros de cada modelo son mostrados en
detalle. Finalmente, se presentan resultados experimentales con diferentes leyes de
control lineal aplicados a cada servomecanismo, los cuales son comparados con los
resultados de simulación.

2
ÍNDICE PAG.
1 INFORME FINAL DE RESIDENCIA PROFESIONAL……..………………………… 8
1.1 Introducción……………………………………………………………………………... 9
1.2 Datos generales de la empresa………..…………………………………………..…. 10
1.2.1 Nombre de la empresa………………………………………………………….. 10
1.2.2 Domicilio de la empresa………………………………………………………… 10
1.2.3 Giro………………………………………………………………………………... 10
1.2.4 Organigrama……………………………………………………………………… 10
1.2.5 Breve descripción de la empresa………………………………………………. 12
1.3 Justificación del proyecto……………………………………..……………..………… 13
1.4 Objetivos generales y específicos……………………………...……………….……. 13
1.4.1 Objetivo general…………………………..……………………………………… 13
1.4.2 Objetivos específicos…………………………...………………….……………. 13
1.5 Características del área en que participo……….…………………………………… 14
1.6 Alcance y limitaciones……………………….………………….…………...………… 14
1.7 Fundamento teórico…………………………………………….……………....……… 15
1.7.1 Control de servomecanismos……………..………….…….………….….…… 15
1.7.2 Modelos matemáticos.…………………………………..…………..………….. 16
1.7.2.1 Motor-tacogenerador……………….….…………………..………….. 16
1.7.2.1.1 Análisis mecánico del motor……………………….……….. 18
1.7.2.1.2 Análisis eléctrico del motor…………...…………………….. 20
1.7.2.2 Sistema barra-bola………………………….…….…………………… 23
1.7.2.1.1 Análisis mecánico del sistema barra-bola………………… 24
1.7.2.1.2 Análisis del motor del sistema barra-bola…………….….. 28
1.7.3 Adquisición de datos con MATLAB/SIMULINK……………………….…...... 31
1.7.3.1 Real Time Windows Target…………………………………………… 32
1.8 Procedimiento y descripción de las actividades realizadas……………………..… 34
1.8.1 Estudio de la tarjeta Advantech PCL-711B…………………..…….………... 34
1.8.2 Estudio del toolbox de adquisición de datos en MATLAB………..………… 37
1.8.3 Configuración de Matlab para trabajar con la tarjeta PCL-711B………....... 39

3
1.8.4 Prácticas de control mediante la tarjeta PCL-711B……………..………...… 53
1.8.4.1 Determinación de parámetros del motor-tacogenerador…..….……. 54
1.8.4.2 Control de velocidad del motor-tacogenerador…………...…………. 70
1.8.3.3 Control de un sistema barra-bola…………………….…………..…… 79
1.9 Evaluación del Proyecto……………………………..………….…….……….……… 89
1.10 Resultados obtenidos……………………………………..………..………………... 90
1.11 Conclusiones y recomendaciones…………………………………………………... 91
1.12 Bibliografía……………………………………………..…………………..………….. 92
2 ANEXOS………….……………………………………………..……….…….….……… 93
3 DOCUMENTOS ADMINISTRATIVOS………………………………………….……… 96

4
ÍNDICE DE FIGURAS PAG.
Figura 1.2.1 Dirección y Subdirecciones 10
Figura 1.2.2 Subdirección Académica 11
Figura 1.2.3 Subdirección de Servicios Administrativos 11
Figura 1.2.4 Subdirección de Planeación y Vinculación 12
Figura 1.7.1 Esquema del motor-tacogenerador 17
Figura 1.7.2 Tren de engranes y carga inercial del motor-tacogenerador 18
Figura 1.7.3 Diagrama de un motor de CD 20
Figura 1.7.4 Diagrama de bloques del motor de CD de imanes permanentes 22
Figura 1.7.5 Sistema barra-bola 23
Figura 1.7.6 Relación entre el ángulo de la barra y el ángulo del motor 27
Figura 1.7.7 Tren de engranes del motor del sistema barra-bola 28
Figura 1.7.8 Adquisición de datos analógicos con Real Time Windows Target 33
Figura 1.7.9 Librería Real Time Windows Target 33
Figura 1.8.1 Tarjeta PCL-711B 34
Figura 1.8.2 Entradas y salidas de la tarjeta PCL-711B 36
Figura 1.8.3 Equipo utilizado para generación y adquisición de señales 39
Figura 1.8.4 Nuevo modelo para adquisición de datos analógicos 40
Figura 1.8.5 Adquisición de datos analógicos 40
Figura 1.8.6 Configuración del bloque Analog Input 41
Figura 1.8.7 Verificación del estado de la tarjeta 41
Figura 1.8.8 Configuración del bloque Analog Input Finalizada 42
Figura 1.8.9 Configuración de parámetros 42
Figura 1.8.10 Configuración de la solución 43
Figura 1.8.11 System target file 44
Figura 1.8.12 Configuración resultante la ventana Real-Time Workshop 44
Figura 1.8.13 Parámetros del osciloscopio 44
Figura 1.8.14 Configuración de los parámetros del bloque Scope 45
Figura 1.8.15 Límite de puntos 45
Figura 1.8.16 Tools/ External mode control panel 46
Figura 1.8.17 Cantidad de puntos a graficar 46
Figura 1.8.18 Construcción del modelo 47

5
Figura 1.8.19 Adquisición de señal senoidal a 40Hz 48
Figura 1.8.20 Adquisición de señal diente de sierra a 40Hz 48
Figura 1.8.21 Modelo para la generación de señal 49
Figura 1.8.22 Parámetros del bloque de salida 50
Figura 1.8.23. Verificación de la salida de la tarjeta 50
Figura 1.8.24 Configuración de parámetros de bloque de salida finalizada 51
Figura 1.8.25 Modelo con bloque configurado 51
Figura 1.8.26. Señal de salida vista en el osciloscopio 52
Figura 1.8.27 Sistema SRV2 de Lab-Volt 53
Figura 1.8.28 Sistema Barra-Bola 53
Figura 1.8.29 Sistema Motor-Tacogenerador 53
Figura 1.8.30 Conexión del motor en lazo abierto 55
Figura 1.8.31 Circuito eléctrico del motor 55
Figura 1.8.32 No linealidad de zona muerta 58
Figura 1.8.33 Esquema para determinar kT 58
Figura 1.8.34 Respuesta de un sistema de primer orden 62
Figura 1.8.35 Adquisición de datos usando la librería RTWIN en SIMULINK 63
Figura 1.8.36 Repuesta del sistema motor-tacogenerador a una entrada escalón de 2V 63
Figura 1.8.37 Disco de densidad uniforme 64
Figura 1.8.38 Diagrama de bloques para la comparación de la respuesta del motor-
tacogenerador y la del nuevo modelo ante una entrada escalón
67
Figura 1.8.39 Bloque Analog Ouput 67
Figura 1.8.40 Respuesta real vs simulación (nuevo modelo) 68
Figura 1.8.41 Comparación entre la respuesta real, el nuevo modelo y el modelo Lab-Volt 69
Figura 1.8.42 Diagrama de bloques del Motor-Tacogenerador 71
Figura 1.8.43 Amplificador operacional 71
Figura 1.8.44 Diagrama de bloques del experimento 1 72
Figura 1.8.45 Lugar de las raíces para el sistema del experimento 1 74
Figura 1.8.46 Modelo en Simulink con el compensador1 74
Figura 1.8.47 Respuesta del sistema con el compensador1 75
Figura 1.8.48 Error del sistema con el compensador1 75
Figura 1.8.49 Modelo para los experimentos 2, 3 y 4 76
Figura 1.8.50 Lugar de las raíces de los experimentos 2, 3 y 4 77

6
Figura 1.8.51 Respuesta y error del experimento 2 78
Figura 1.8.52 Respuesta y error del experimento 3 78
Figura 1.8.53 Respuesta y error del experimento 4 78
Figura 1.8.54 Posición angular del motor medida con el potenciómetro 80
Figura 1.8.55 Diagrama de bloques del sistema Barra-Bola en lazo cerrado 80
Figura 1.8.56 Lugar de las raíces del sistema Barra-Bola en lazo cerrado 81
Figura 1.8.57 Diagrama esquemático para el control en forma analógica 81
Figura 1.8.58 Amplificador diferencial 82
Figura 1.8.59 Amplificador diferencial simplificado 82
Figura 1.8.60 Diagrama de boques del amplificador operacional 83
Figura 1.8.61 Diagrama de bloques del amplificador y sus parámetros 84
Figura 1.8.62 Representación en diagrama de bloques del sistema barra-bola con control
analógico.
84
Figura 1.8.63 Lugar de las raíces del sistema compensado 85
Figura 1.8.64 Modelo para el control de sistema Barra-Bola 85
Figura 1.8.65 Respuesta del sistema Barra-Bola a una entrada escalón 86
Figura 1.8.66 Respuesta del sistema barra-bola ante un tren de pulsos, con K=1 87
Figura 1.8.67 Desempeño del sistema ante perturbaciones, con K=1 87
Figura 1.8.68 Respuesta del sistema Barra-Bola a un tren de pulsos, con K=2 88
Figura 1.8.69 Desempeño del sistema ante perturbaciones, con K=2 88

7
ÍNDICE DE TABLAS PAG.
Tabla 1.8.1 Características de la tarjeta PCL-711B 34
Tabla 1.8.2 Experimentos de la obtención de ke y kg 57
Tabla 1.8.3 Experimentos de la obtención de kT 59
Tabla 1.8.4. Experimentos para la obtención de b 61
Tabla 1.8.5 Experimentos en la obtención de bm 61
Tabla 1.8.6 Parámetros del motor-tacogenerador 66
Tabla 1.8.7 Parámetros del amplificador operacional para cada experimento 72
Tabla 1.8.8 Funciones de transferencia del compensador por experimento 72
Tabla 1.8.9 Datos extraídos del lugar de las raíces con el control PI 77
Tabla 1.8.10 Tiempo de asentamiento Ts de los experimentos del 2 al 4 79
Tabla 1.8.11 Valor de los parámetros para el control analógico 82

8
1 INFORME FINAL DE RESIDENCIA PROFESIONAL

9
1.1 INTRODUCCIÓN
En el ámbito científico, el control por computadora en tiempo real tiene una gran
relevancia, pues actualmente es indispensable para validar los resultados de las
investigaciones realizadas en el desarrollo de nuevos controladores o mejoras a los ya
existentes.
MATLAB presenta una aplicación para hacer simulaciones en tiempo real, esta
herramienta es Real Time Windows Target (RTWIN). Esta presenta diferentes
aplicaciones, como control en tiempo real y simulación en tiempo real para plantas
físicas.
Real Time Windows Target es una solución aplicada para prototipos y pruebas de
sistemas reales, donde permite realizar visualizaciones de señales, modificación de
parámetros y control en tiempo real con bloques en SIMULINK.
MATLAB-SIMULINK y la tarjeta PCL-711B como una herramienta en conjunto, trae
consigo la posibilidad de probar diferentes algoritmos de control y poder así validar y
estudiar el desempeño un sistema de control.
En este trabajo de residencia se presentan los pasos para poder trabajar con Matlab y
la tarjeta de adquisición de datos PCL-711B. Este trabajo no solo se limita a la
visualización de señales analógicas, si no a la posibilidad de poder controlar
servomecanismos.
El primer servomecanismo con el que se trabaja es un motor-tacogenerador,
primeramente se tiene la tarea de encontrar los parámetros de su modelo matemático,
con el fin de analizar y diseñar un sistema de control posteriormente.
Una vez encontrado el modelo del motor-tacogenerador se compara su respuesta con
la del sistema real, con el objetivo de corroborar dicho modelo.
El segundo servomecanismo es un sistema barra-bola, el cual se estabilizara y
controlara con bloques en SIMULINK, bloques que representaran el control analógico
con el que se controla actualmente el sistema.
Al igual, la respuesta del sistema barra-bola es comparada con la de su modelo
matemático.

10
1.2 DATOS GENERALES DE LA EMPRESA
1.2.1 Nombre de la empresa
Instituto Tecnológico de La Paz
1.2.2 Domicilio de la empresa
Boulevard Forjadores de Baja California Sur, No. 4720. Apdo. Postal 43-B, C.P. 23080.
La Paz B. C. S., Mexico.
Tels.: (612) 12-104-24, 12-104-26, 12-107-05. Fax: (612) 12-112-95
1.2.3 Giro
Educación Superior
1.2.4 Organigrama
Figura 1.2.1 Dirección y Subdirecciones
11
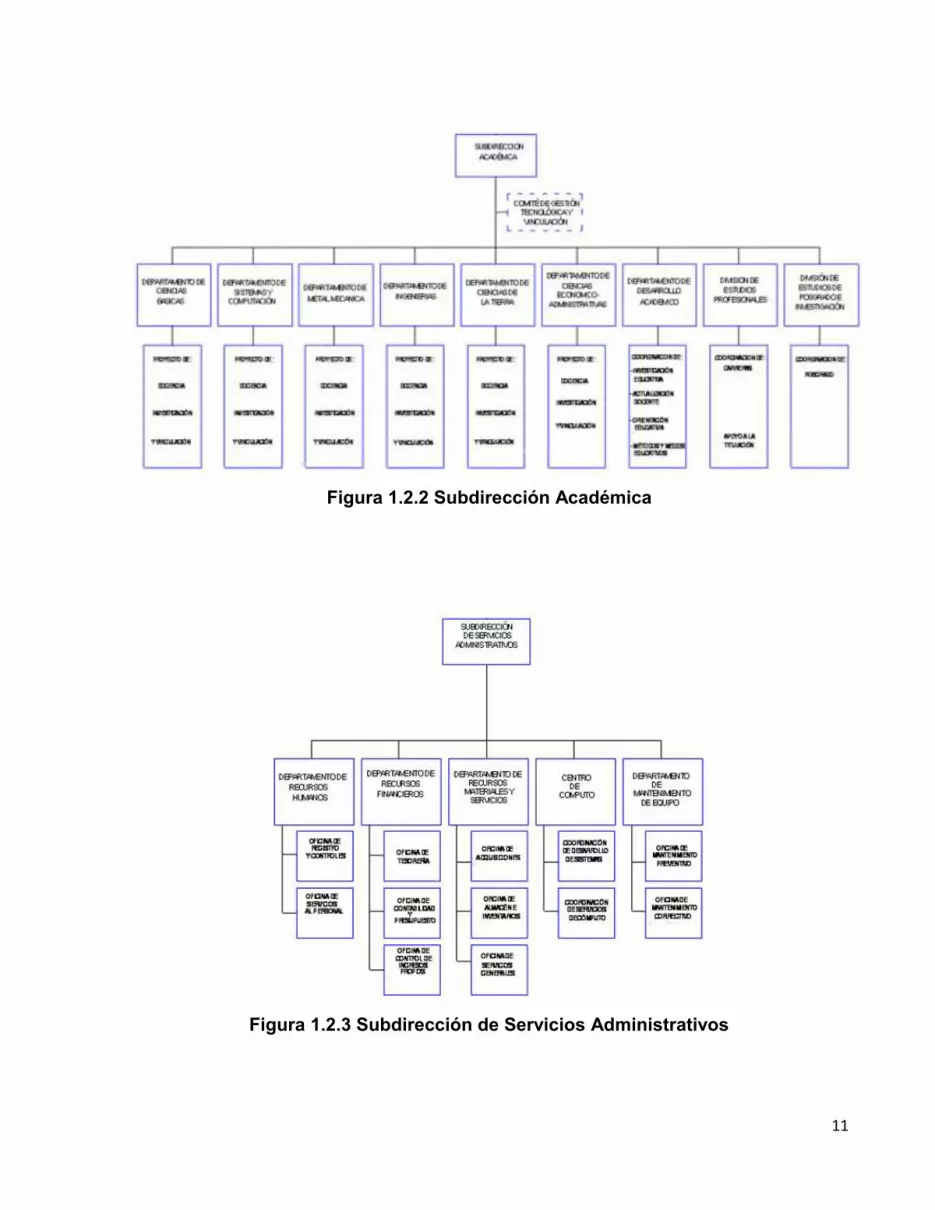
Figura 1.2.2 Subdirección Académica
Figura 1.2.3 Subdirección de Servicios Administrativos

12
Figura 1.2.4 Subdirección de Planeación y Vinculación
1.2.5 Breve descripción de la empresa
En septiembre del año de 1973, fue creado el Instituto Tecnológico de La Paz, por
disposición del entonces Presidente de la República, Lic. Luis Echeverría Alvarez,
con esto Baja California Sur complementa su pirámide educacional; al cubrir por
primera vez en su historia el nivel de Educación Superior.
En marzo de 1974, el joven Romualdo Nuñez Sánchez, triunfa en el concurso “EL
ESCUDO DEL I.T.L.P.” símbolo que desde entonces distingue a las Institución, y
posteriormente en el concurso “LOS COLORES DISTINTIVOS DEL PLANTEL”.
En octubre de 1976, ante la comunidad escolar del Tecnológico se hizo entrega de
los premios a los triunfadores del Concurso “NUESTRO LEMA” en el cual el primer
lugar correspondió al Lic. Ignacio Ibarra Pérez, quien presentó el lema “CIENCIA
ES VERDAD, TÉCNICA ES LIBERTAD” que distingue actualmente el plantel.

13
1.3 JUSTIFICACIÓN
El laboratorio de Ingeniería Electromecánica del ITLP actualmente cuenta con una
tarjeta de adquisición de datos PCL-711B de la marca Advantech y con algunos
servomecanismos, cuyo control presenta ciertas limitaciones, tales como el no
poder registrar gráfica y numéricamente la respuesta del sistema de control para
un estudio posterior.
La propuesta de este proyecto se enfoca en resolver estas limitaciones con
material y equipo existente en el laboratorio. Propone la generación y lectura de
señales analógicas, así como el control de servomecanismos usando la tarjeta de
adquisición de datos PCL-711B de la marca Advantech y el software MATLAB.
Este proyecto apoyara de manera importante a las prácticas de laboratorio de
las materias de Ingeniería de Control I e Ingeniería de Control II, de la carrera
Ingeniería Electromecánica.
1.4 OBJETIVOS GENERALES Y ESPECIFICOS
1.4.1 Objetivo general
Implementar el control de servomecanismos en tiempo real con la tarjeta
Advantech PCL-711B, utilizando como interfaz de programación el software
MATLAB/SIMULINK y la librería Real-Time Windows Target.
1.4.2 Objetivos específicos
Adquisición y generación de señales analógicas.
Control del motor-tacogenerador y del sistema barra-bola del panel SRV2 de
Lab-Volt mediante la tarjeta PCL-711B con MATLAB/SIMULINK.
Corroborar los modelos matemáticos tanto del motor-tacogenerador, como del
sistema barra-bola del panel SRV2 de Lab-Volt.

14
1.5 CARACTERÍSTICAS DEL ÁREA EN QUE PARTICIPÓ
La presente residencia profesional se llevó a cabo en el laboratorio de Ingeniería
Electromecánica, el cual está ubicado en las instalaciones del Instituto Tecnológico de
La Paz.
El laboratorio cuenta con una tarjeta de adquisición de datos de la marca Advantech,
modelo PCL-711B, la cual es la herramienta principal de este trabajo.
El laboratorio cuenta también con un sistema de entrenamiento de servocontrol, de la
marca Lab-Volt. Este sistema sirve para hacer prácticas de laboratorio de las materias
de Ing. de Control. Cuenta con dos subsistemas independientes, un motor-
tacogenerador y un sistema barra-bola.
La tarjeta PCL-711B y el sistema SRV2 fueron utilizados para el desarrollo de este
trabajo.
1.6 ALCANCE Y LIMITACIONES
Alcances:
Adquisición y generación de señales analógicas con la tarjeta PCL-711B utilizando
la librería Real Time Windows Target de MATLAB/SIMULINK.
Identificación de parámetros del motor-tacogenerador.
Control de velocidad del motor-tacogenerador.
Análisis de estabilidad y control del sistema barra-bola.
Limitaciones:
En la adquisición y generación de señales analógicas, utilizando la librería Real
Time Windows Target de MATLAB el muestreo no puede ser mayor de 1000
muestras/segundo.
La salida analógica de tarjeta PCL-711B solo puede suministrar voltajes positivos
de 0 a +10 volts; por lo cual es necesario contar con un convertidor de nivel para el
control de servomecanismos.
La tarjeta PCL-711B solo puede ser instalada en CPUs que cuenten con puertos
ISA, los cuales ya no se encuentran en las computadoras modernas.
15
1.7 FUNDAMENTO TEÓRICO
1.7.1 Control de servomecanismos
El control se relaciona con la regulación de las variables físicas de un sistema,
(tales como posición, velocidad o temperatura), de acuerdo con una señal de
mando a la entrada. El control de circuito abierto, o control no retroalimentado, se
caracteriza por una relación fija entre la respuesta de salida y la señal de mando
sin observar dicha salida durante la operación normal. El control consiste en
disponer la señal de mando para que la salida corresponda a una entrada
previamente establecida. El control de circuito cerrado, o control retroalimentado,
se basa en observar y comparar la señal de salida con la señal de referencia de la
entrada. La diferencia entre la señal de salida y la señal de entrada representa el
error. Un sistema de circuito cerrado ajusta automáticamente la respuesta de
salida para minimizar el error.
Un servomecanismo es un sistema electromecánico de control de circuito cerrado
en el cual la respuesta es la posición, velocidad, aceleración [8].
Un servomecanismo generalmente está constituido por componentes
electromecánicos y electrónicos combinados en forma tal que proporcionan la
función de control deseada. Para convertir la señal de entrada a una forma
compatible con la naturaleza del servomecanismo, puede requerirse o no un
dispositivo transductor de entrada. Normalmente el transductor de entrada
proporciona una señal eléctrica al sistema.
Un transductor de retroalimentación, o elemento de retroalimentación, controla o
mide la respuesta del servomecanismo en su eje de salida y la convierte en una
señal eléctrica correspondiente.
El elemento de comparación, recibe las señales de la entrada y del transductor de
retroalimentación, las compara y proporciona una salida relacionada con su
diferencia. El servoamplificador amplifica la señal de error recibida desde el

16
elemento de comparación para impulsar el servomotor. El servomotor es el
elemento mecánico de potencia del sistema. La carga es la parte que se mueve
acoplada al eje de salida del servomecanismo.
El desempeño de los servomecanismos se juzga frecuentemente por la precisión
con la cual la respuesta de salida sigue al mando de entrada. Los factores que
afectan la precisión son: a) la ganancia y estabilidad de los servomecanismos, b)
la naturaleza de la carga, c) la influencia de las fluctuaciones del voltaje de la línea
y del par mecanico y d) la naturaleza del mando de entrada.
Los objetivos del diseño de un servomecanismo se establecen esencialmente por
el mando de entrada y por la precisión requerida bajo un conjunto de condiciones.
1.7.2 Modelos matemáticos
Este apartado tiene como objetivo mostrar la obtención de los modelos
matemáticos de dos plantas: un motor-tacogenerador y un sistema barra-bola.
1.7.2.1 Motor-tacogenerador
El modelo obtenido es una aproximación lineal de la dinámica del motor real,
donde se han despreciado los efectos no lineales, como la histéresis y la fricción
en las escobillas [2].
El motor-tacogenerador está acoplado mediante engranes externos a un
potenciómetro, que se utiliza como sensor para controlar la posición del motor
(Véase la Figura 1.7.1).
Externamente el motor tiene acoplado un disco metálico como carga inercial Jc, el
cual puede modificar el momento de inercia del motor.

17
Figura 1.7.1 Esquema del motor-tacogenerador
donde
Va = es el voltaje de entrada del motor
Vg = es el voltaje de salida del tacogenerador
bm = es la constante viscosa del motor
Jm = es el momento de inercia del motor
bp = es la constante viscosa en el eje del potenciómetro
Ra= resistencia del devanado de armadura
La= inductancia del devanado de armadura
ωa= velocidad angular del motor
ωb= velocidad angular de los engranes externos

18
1.7.2.1.1 Análisis mecánico del motor
Del sistema de engranes de la Figura 1.7.2, se aplica la segunda ley de Newton
para el primer eje [1] y se expresa en el dominio de Laplace como
(1.7.1)
donde Tm es el par desarrollado por el motor, T1 es el par de carga en el engrane
1, ωm es la velocidad angular en el primer eje y bm es la constante viscosa de
rotor, del primer eje más el segundo.
Figura 1.7.2 Tren de engranes y carga inercial del motor-tacogenerador
De igual forma se aplica la segunda ley de Newton para el segundo eje y se
obtiene:
(1.7.2)
donde T2 es el par desarrollado en el engrane 2, T3 es el par desarrollado en el
engrane 3, Je es el momento de inercia de cada engrane externo y ω1 es la
velocidad angular en el segundo eje.

19
Finalmente se aplica la segunda ley de Newton para el tercer eje:
(1.7.3)
donde T4 es el par desarrollado en el engrane 4, T es un par externo como una
perturbación, bp es la contante viscosa del tercer eje conectado al potenciómetro y
ω2 es la velocidad angular en el tercer eje.
Conociendo la relación de cada par de engranes como:
podemos decir que:
(1.7.4)
(1.7.5)
(1.7.6)
(1.7.7)
Considerando (1.7.5), (1.7.3) y (1.7.2) se obtiene
(1.7.8)
Ahora, tomando en cuenta (1.7.1), (1.7.4) y (1.7.8) para obtener:
(1.7.9)
Enseguida se consideran (1.7.6), (1.7.7) para referir las velocidades ω1 y ω2 en
función de ωm. Luego entonces, sustituyendo estos resultados en (1.7.9) resulta:

20
Agrupando términos:
(1.7.10)
La ecuación (1.7.10) tiene la misma estructura obtenida en [2] (Cap. 2 Pag.60)
(1.7.11)
Por lo que podemos decir que,
, (1.7.12)
, (1.7.13)
. (1.7.14)
1.7.2.1.2 Análisis eléctrico del motor
En la Figura 1.7.3 se muestra un circuito que representa un motor de CD de
imanes permanentes, así como cada uno de los parámetros que lo caracteriza.
Figura 1.7.3 Diagrama de un motor de CD

21
donde:
Ra = resistencia del devanado de armadura [Ω]
La = inductancia del devanado de armadura [H]
i = corriente del devanado de armadura [A]
Ve = fuerza contraelectromotriz [V]
ke = constante contraelectromotriz [V/rad/s]
kT = constante de par [Nm/A]
J = inercia total del motor [Kgm-s2]
b = constante viscosa del motor [Nm/rad/s]
τm = par generado [Nm]
τL = par de la carga [Nm]
Va = voltaje aplicado a la armadura [V]
ω = velocidad angular [rad/s]
Para un motor de imanes permanentes, el flujo de campo magnético es constante
y se cumple que:
en el dominio de Laplace es:
(1.7.15)
donde kT es la constante de par.
Aplicando la Ley de voltajes Kirchhoff en el circuito de la Figura 1.7.3, obtenemos:
(1.7.16)
donde ve(t) es el voltaje de la fuerza contra electromotriz proporcional a la
velocidad del motor. Por tanto
(1.7.17)
donde ke es la constante contraelectromotriz.

22
Las ecuaciones (1.7.16) y (1.7.17) en el dominio de Laplace con condiciones
iniciales igual a cero, resultan:
(1.7.18)
y
(1.7.19)
Sustituyendo la ecuación (1.7.19) en la (1.7.18) y despejando I(s) nos queda:
(1.7.20)
Usando las ecuaciones (1.7.11), (1.7.15) y (1.7.20), se puede representar el
modelo del motor de CD en un diagrama de bloques como se muestra en la Figura
1.7.4.
Figura 1.7.4 Diagrama de bloques del motor de CD de imanes permanentes
Considerando Td(s)=0 y despreciando La, se obtiene la función de transferencia:
(1.7.21)
donde la constante de tiempo mecánico
Va(s) 1kT
1
Ra+ Las
ke
Js+ b
T d(s)
I(s) T L(s) (s)Tm(s)
Ve(s)

23
Con Va(s)=0 y despreciando La nuevamente, se obtiene la función de
transferencia:
(1.7.22)
Usando el principio de superposición para las ecuaciones (1.7.21) y (1.7.22)
resulta:
(1.7.23)
1.7.2.2 Sistema barra-bola
Este sistema es un sistema mecánico subactuado, es decir, tiene más actuadores
que grados de libertad.
El sistema barra-bola de la Figura 1.7.5, se encarga de ubicar una esfera con
masa m que se desplaza sobre una barra de longitud L en una posición r. La
posición de la esfera es controlada al variar el ángulo α de la barra, que está
relacionada con el ángulo θ del engrane del motor. De esta manera, la esfera
puede ser posicionada en algún lugar deseado de la barra, balanceándola de
manera adecuada.
Figura 1.7.5 Sistema barra-bola
24
El resto de los parámetros corresponden a:
M= Masa de la barra [Kg]
R= Radio de la bola [m]
N= Fuerza normal [N]
g= Aceleración de la gravedad (9.81 m/s2)
1.7.2.2.1 Análisis mecánico del sistema barra-bola
Momento de inercia de la barra
Se calcula el momento de inercia Ibar, de una barra de masa M y longitud L
respecto de un eje perpendicular a la varilla que pasa por uno de sus extremos. El
momento de inercia para una barra sin grosor está dado por [5]
(1.7.24)
Momento de inercia de la bola
(1.7.25)
Donde m es la masa de la esfera y R es el radio de la bola [5].
Energía cinética de la bola
Se determinará la energía cinética de un cuerpo, en este caso el de una esfera rodando, sin deslizamiento, la energía cinética está dada por:
(1.7.26)
25
donde son la velocidad de traslación y la velocidad angular de la bola
respectivamente.
Sustituyendo el momento de inercia de la esfera obtenemos
(1.7.27)
Se tiene también que la velocidad v de la esfera puede ser obtenida al hacer el
diagrama de velocidad de la barra y la esfera, esta fórmula está dada por,
(1.7.28)
donde es la velocidad radial de la bola.
También se tiene que
(1.7.29)
Sustituyendo (1.7.28) y (1.7.29) en (1.7.27) se obtiene la energía cinética de la
bola
(1.7.30)
Energía cinética de la barra
La energía cinética de la barra está dada por:
(1.7.31)
donde Ibar es el momento de inercia de la barra, es la velocidad angular de la
barra.
Una vez que se obtuvieron las energías cinéticas de la barra y la esfera, se tiene
la energía total del sistema que está dado por:

26
(1.7.32)
Energía potencial del sistema
La energía potencial del sistema cuando la bola rueda está dado por:
(1.7.33)
donde M es la masa de la barra, L es la longitud de la barra y r es la posición de
la bola.
Considerando T y P en (1.7.32) y (1.7.33), el lagrangiano L (α, r, resulta en
las ecuaciones de movimiento están dadas por
tal que
(1.7.34a)
(1.7.34b)
donde el sistema (1.7.34a) y (1.7.34b) es el modelo no lineal del sistema barra-
bola.
Linealizando (1.7.34b) por aproximación de la serie de Taylor, alrededor del punto
de equilibrio, resulta

27
Aplicando la transformada de Laplace, donde las condiciones iniciales son iguales
a cero obtenemos con la función de transferencia:
Finalmente, la relación entre es una relación no lineal pero puede ser
aproximada de forma lineal (ver Figura 1.7.6) por la siguiente ecuación:
Figura 1.7.6 Relación entre el ángulo de la barra y el ángulo del motor
Resulta entonces la siguiente función de transferencia para el sistema barra-bola
donde , g = -9.81m/s2, tal que
(1.7.35)
(1.7.36)

28
1.7.2.1.2 Análisis de motor del sistema barra-bola
El análisis del circuito eléctrico es igual al del motor-tacogenerador. Por lo que
(1.7.37)
(1.7.38)
donde
Ra = resistencia del devanado de armadura [Ω]
La = inductancia del devanado de armadura [H]
I = corriente del devanado de armadura [A]
ke = constante contraelectromotriz [V/rad/s]
Va = voltaje aplicado a la armadura [V]
ω = velocidad angular [rad/s]
Figura 1.7.7 Tren de engranes del motor del sistema barra-bola

29
Del sistema de engranes de la Figura 1.7.7, aplicando la segunda ley de Newton al
igual que en análisis anterior con el sistema motor-tacogenerador se obtienen las
siguientes ecuaciones
(1.7.39)
(1.7.40)
(1.7.41)
La relación de cada par de engranes es
tal que:
, (1.7.42)
, (1.7.43)
, (1.7.44)
. (1.7.45)
Considerando (1.7.43), (1.7.41) en (1.7.40), se obtiene
(1.7.46)
Ahora, tomando en cuenta (1.7.39), (1.7.42) en (1.7.46), queda
(1.7.47)

30
En seguida se consideran (1.7.44), (1.7.45) para referir las velocidades ω1 y ω2 en
función de ωm. Luego entonces, sustituyendo estos resultados en (1.7.47) resulta:
Agrupando términos:
(1.7.48)
La ecuación (1.7.48) tiene la misma estructura obtenida en [2] (Cap. 2, Pág.60)
(1.7.49)
donde
(1.7.50)
(1.7.51)
. (1.7.52)
Usando las ecuaciones (1.7.37), (1.7.38) y (1.7.49), se puede representar el motor
en un diagrama de bloques como la mostrada en la Figura 1.7.4, con una función
de transferencia
(1.7.53)
donde la constante de tiempo mecánico es .

31
1.7.3 Adquisición de datos con MATLAB/SIMULINK
Simulink es una herramienta para el modelaje, análisis y simulación de una amplia
variedad de sistemas físicos y matemáticos, inclusive aquellos con elementos no
lineales y aquellos que hacen uso de tiempos continuos y discretos. Como una
extensión de Matlab, Simulink adiciona muchas características específicas a los
sistemas dinámicos.
Simulink tiene dos fases de uso: la definición del modelo y el análisis del modelo.
La definición del modelo significa construir el modelo a partir de elementos básicos
construidos previamente, tal como, integradores, bloques de ganancia o
servomotores. El análisis del modelo significa realizar la simulación, linealización y
determinar el punto de equilibrio de un modelo previamente definido.
Para simplificar la definición del modelo Simulink usa diferentes clases de
ventanas llamadas ventanas de diagramas de bloques. En estas ventanas se
puede crear y editar un modelo gráficamente. Simulink usa un ambiente gráfico lo
que hace sencillo la creación de los modelos de sistemas.
Después de definir un modelo este puede ser analizado seleccionando una opción
en los menús de Simulink, o con comandos en el área de trabajo de Matlab.
Simulink puede simular cualquier sistema que pueda ser definido por ecuaciones
diferenciales continuas y ecuaciones diferenciales discretas. Esto significa que se
puede modelar sistemas continuos, discretos o sistemas híbridos.
Simulink usa diagramas de bloques para representar sistemas dinámicos.
Mediante una interface gráfica con el usuario se pueden arrastrar los componentes
desde una librería de bloques existentes y luego interconectarlos mediante
conectores y alambre.

32
1.7.3.1 Real Time Windows Target
Matlab contiene la aplicación Real Time Windows Target la cual permite realizar
simulaciones en tiempo real. Esta herramienta presenta diferentes aplicaciones
como control y simulación en tiempo real para plantas físicas como por ejemplo
turbinas de avión y otros modelos de sistemas físicos.
La aplicación Real time Target, es una herramienta de Matlab que permite adquirir
datos y generar señales en tiempo real. La comunicación entre la computadora y
los dispositivos externos se realiza por medio de una tarjeta de adquisición de
datos. (Véase la Figura 1.7.8)
El RTWIN Incluye un conjunto de bloques de I/O (Véase la Figura 1.7.9) que
proporcionan conexiones entre las entradas y salidas físicas de la tarjeta y el
modelo en tiempo real. Estos son
Bloques de Entrada digital permiten conectar señales de entrada digitales
para el diagrama de bloques Simulink.
Bloques de Salida digital conectan señales digitales del diagrama de
bloques Simulink para controlar el hardware externo.
Bloques de Entrada analógicos permiten utilizar convertidores A/D que
digitalizan señales analógicas para su uso como entradas para los
diagramas de bloques Simulink.
Bloques de Salida analógica permiten el diagrama de bloques Simulink
utilizar convertidores d/a para señales analógicas de su modelo de
Simulink.

33
Figura 1.7.8 Adquisición de datos analógicos con Real Time Windows Target
Figura 1.7.9 Librería Real Time Windows Target
34
1.8 PROCEDIMIENTO Y DESCRIPCIÓN DE LAS ACTIVIDADES REALIZADAS
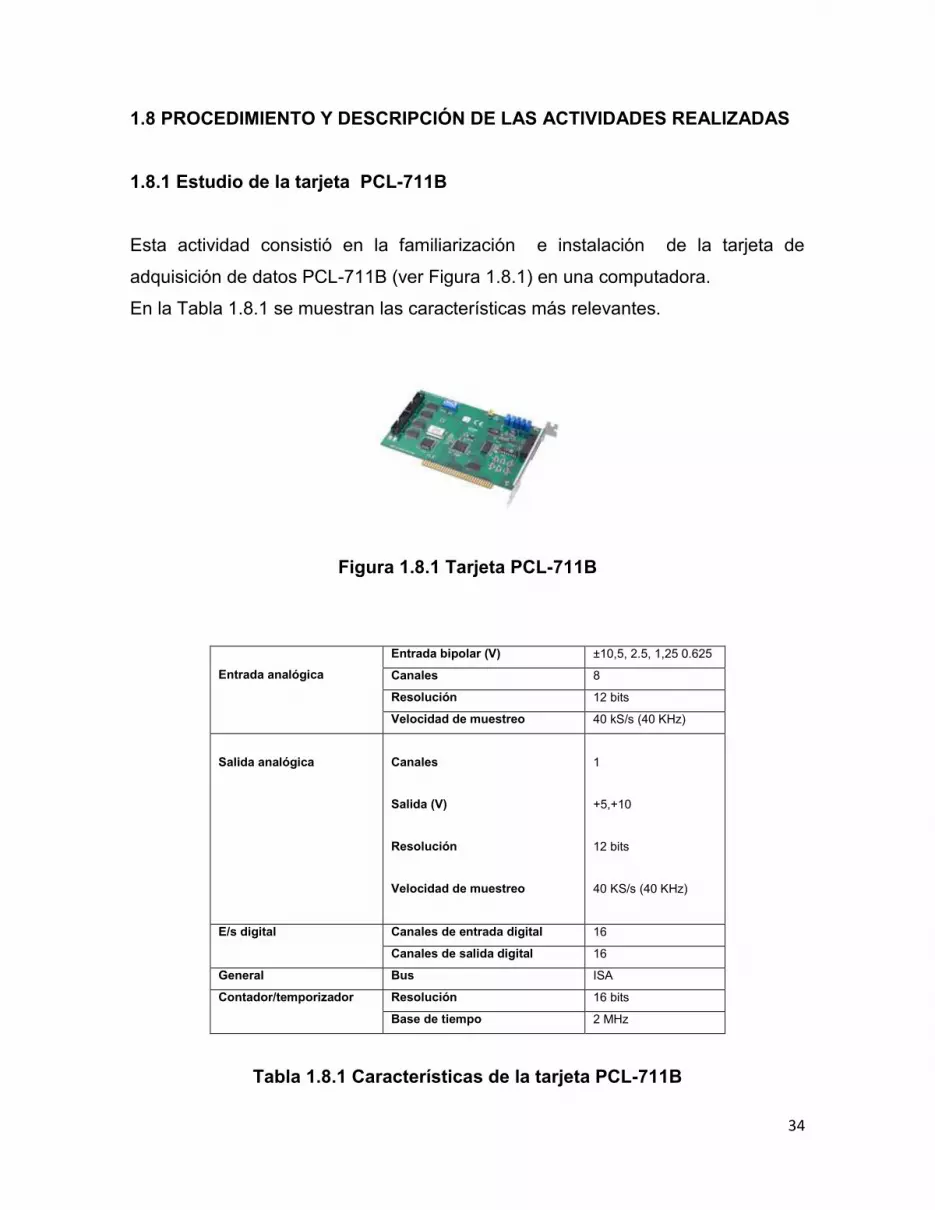
1.8.1 Estudio de la tarjeta PCL-711B
Esta actividad consistió en la familiarización e instalación de la tarjeta de
adquisición de datos PCL-711B (ver Figura 1.8.1) en una computadora.
En la Tabla 1.8.1 se muestran las características más relevantes.
Figura 1.8.1 Tarjeta PCL-711B
Entrada analógica
Entrada bipolar (V) ±10,5, 2.5, 1,25 0.625
Canales 8
Resolución 12 bits
Velocidad de muestreo 40 kS/s (40 KHz)
Salida analógica
Canales
Salida (V)
Resolución
Velocidad de muestreo
1
+5,+10
12 bits
40 KS/s (40 KHz)
E/s digital Canales de entrada digital 16
Canales de salida digital 16
General Bus ISA
Contador/temporizador Resolución 16 bits
Base de tiempo 2 MHz
Tabla 1.8.1 Características de la tarjeta PCL-711B

35
Instalación de la tarjeta PCL-711B en la PC
Antes de conectar en la PC
• Se asegura que la fuente de poder este apagada.
• Todos los cables de alimentación y los dispositivos periféricos deben
mantenerse desconectados del sistema.
• Utilizar una pulsera antiestática.
Se utilizó el siguiente procedimiento como guía para conectar en el equipo.
1. Usar una pulsera antiestática para manipular la tarjeta.
2. Quitar la cubierta de la PC, y localizar una ranura vacante (puerto ISA) para
instalar la tarjeta.
3. Tome la tarjeta e insértela en el puerto, presionando firmemente la tarjeta.
3. Una vez que se ha insertado la tarjeta en la ranura, asegúrela al chasis
sujetando su consola de montaje con un tornillo.
4. Colocar los cables a cualquiera de los conectores CN1, CN3, y CN4 que su
aplicación pueda requerir.
5. Ahora, coloque nuevamente la cubierta, y conecte los cables de alimentación y
cualquier periférico desconectado.
La PCL-711B está equipada con tres conectores de 20-pines. Dos de ellos están
situados en CN3 y CN4. Para utilizar la entrada digital (CN4) y la salida digital
(CN3). El tercero CN1 es para la entrada-salida análoga.
Cada uno de estos conectores se puede conectar con el mismo tipo de cable.
Pueden también ser conectados con un conector D37 usando el kit industrial del
cableado PCLK-1050.

36
Cada uno de estos conectores se da en las siguientes ilustraciones.
Figura 1.8.2 Entradas y salidas de la tarjeta PCL-711B
donde
A/D = Entrada Analógica
D/A = Salida Analógica
AGND = Tierra Analógica
D/I = Entrada Digital
D/O = Salida Digital
DGND = Tierra Digital
37
Conexión de entrada analógica (A/D)
La PCL-711B consta de ocho entradas analógicas. Una señal analógica usa una
terminal de entrada analógica y una de tierra (referencia). Por ejemplo, para medir
el voltaje de una batería, conecte simplemente su lado negativo con la tierra de
PCL-711B (uno de los pines AGND en el conector CN1), y su lado positivo con
uno de los canales de entrada análoga de la tarjeta.
Conexión de salida analógica (D/A)
La PCL-711B cuenta con solo una salida analógica, se equipa de una fuente de
referencia interna de -5 y de -10V que genera una salida de 0 a +5 ó de 0 a +10 V
de salida (D/A) respectivamente. Se utiliza el conectador CN1 para hacer su salida
analógica. Una señal de salida analógica usa la terminal de salida analógica y una
de tierra (referencia).
1.8.2 Estudio del toolbox de adquisición de datos en MATLAB
En esta actividad se estudió la toolbox Real Time Windows Target, con apoyo del
documento Real-Time Windows Target™ 3 User’s Guide [7]. Esta actividad tenía
como objetivo la familiarización con el software, así como investigar sus ventajas y
limitaciones.
Algunas de las características de esta herramienta son:
La posibilidad de adquirir y generar datos de señales analógicas.
La posibilidad de controlar plantas físicas en tiempo real.
La posibilidad de trabajar con la tarjeta PCL-711B.
No es necesario un nivel alto en programación.

38
Requerimientos mínimos de Hardware y Software
Microsoft Windows XP 32-bit o Microsoft Windows Vista 32–bit.
128 megabytes de memoria RAM (256 megabytes recomendados).
MATLAB 7.0.
Simulink.
Real-Time Workshop.
Real-Time Windows Target Kernel
Instalación
Real Time Windows Target forma parte del mismo MATLAB, y permite que las
aplicaciones accedan al Kernel del sistema donde los ejecutables deben ser cargados y
ejecutados. El Real-Time Windows Target Kernel intercepta las interrupciones de tiempo
del reloj del computador, manteniéndolas para operaciones del sistema Windows y
asegura la ejecución de las aplicaciones en tiempo real.
La instalación del Real-Time Windows Target, se realiza en el área de trabajo del
MATLAB, escribiendo:
>> rtwintgt –setup
Para verificar las características de la instalación del Kernel, puede escribir:
>> rtwho
El Real-Time Windows Target requiere de un compilador C. De no tener instalado algún
compilador C en su computadora, es necesario instalar uno. Para elegir el compilador C,
de entre los instalados debe escribir en el área de trabajo:
>> mex –setup
Normalmente se recomienda elegir el compilador Microsoft Visual Studio C/C++, si se
encuentra en la lista.

39
1.8.3 Configuración de Matlab para trabajar con la tarjeta PCL-711B
Este epígrafe tiene como objetivo mostrar la configuración previa de los bloques
de entrada y salida analógica, proporcionados por la librería Real-Time Windows
Target. Una vez configurados, se podrá adquirir y generar señales analógicas.
En la adquisición de señales con la tarjeta PCL-711B, se debe tener en cuenta,
que esta solo puede adquirir señales de hasta ±10V en cada entrada (A/D). Así
como generar señales entre 0V y +5V o +10V en la salida (D/A). Es importante
señalar que para poder controlar algún sistema en particular, se debe tener antes
una etapa de acondicionamiento, así como una etapa de potencia para la salida,
ya que esta suministra una corriente muy pequeña.
Equipo:
Computadora con tarjeta PCL-711B instalada
Modulo de terminales PCLD-7115
Osciloscopio
Generador de funciones
Figura 1.8.3 Equipo utilizado para generación y adquisición de señales

40
Adquisición de señales analógicas:
1.- Se crea un modelo nuevo en Simulink. De la librería Real-Time Windows Target
seleccione y arrastre el bloque Analog Input, el cual nos permitirá la lectura de datos
Analógicos. Para poder visualizar los datos adquiridos agregue un elemento Scope.
Figura 1.8.4 Nuevo modelo para adquisición de datos analógicos
NOTA: En la tarjeta la ganancia en las entradas analógicas actualmente es de dos (x2).
Es decir que si la tarjeta está leyendo una señal de 1V de amplitud, esta señal será
graficada en el Scope con el doble de su valor. Para cambiar está ganancia a uno (x1),
lea el capítulo 3 del manual de la tarjeta PCL-711B.
En estos ejemplos esta ganancia no se cambio, por lo que se agregara al modelo un
bloque de ganancia después del bloque Analog Input de 0.5, véase la Figura 1.8.5.
Figura 1.8.5 Adquisición de datos analógicos

41
2. Configurar el bloque Analog Input, hacer doble click en él y aparecerá la pantalla
siguiente.
Figura 1.8.6 Configuración del bloque Analog Input
3. Seleccionar la tarjeta de adquisición de datos instalada en la computadora, que en
nuestro caso es la PCL-711B. Damos click en Install new board, buscamos la marca y
el modelo de la tarjeta. Nótese la variedad de marcas y modelos compatibles con esta
librería de Matlab.
4. Pulsar Test para verificar el estado de la tarjeta; en caso de un correcto estado
envía un mensaje como se muestra en la Figura 1.8.7.
Figura 1.8.7 Verificación del estado de la tarjeta
5. En esa pantalla pulsamos OK y regresamos a la pantalla de configuración. Ahora
configuramos el período de muestreo a utilizar y los canales a utilizar en la lectura de
datos analógicos. En nuestro caso en Sample time de 0.001 segundos y en Input
Channels escribimos 1 para usar el canal A/D0, los canales se puede escoger del 1 al

42
8, que son respectivamente del A/D0 al A/D7. Escogemos el rango de entrada en este
caso ±10V (Ver Figura 1.8.8)
6. Finalizamos pulsando OK.
Figura 1.8.8 Configuración del bloque Analog Input Finalizada
7. En la ventana de simulación, ir al menú simulation, y dar click en Configuration
Parameters (Ver Figura 1.8.9)
Figura 1.8.9 Configuración de parámetros

43
8. En el cuadro de diálogo, al lado izquierdo de la ventana configuración de parámetros,
seleccionamos la opción Solver. En este apartado Solver, inicialmente podemos
cambiar el tiempo de la simulación en segundos, por ejemplo un tiempo inicial 0.0 y
tiempo final de la simulación igual a 10.0 (Ver Figura 1.8.10)
9. En la lista Type, se escoge Fixed-step, ya que la estructura generada por Real-Time
Workshop no trabaja con la opcion Variable step.
10. En la lista solver, escogemos la solución ode5 (Dormand-Prince).
11. En Fixed step size escribimos el tiempo de muestreo. Por ejemplo 0.001 segundos.
12. En la lista Tasking Mode, escogemos lo opción SingleTasking.
Figura 1.8.10 Configuración de la solución
13. En la lista izquierda de la ventana, seleccionamos Real-Time Workshop (Ver
Figura 1.8.12)
14. En Target selection, dar click en el boton browse, donde aparecerá una lista,
system target file (Figura 1.8.11), se buscará y seleccionará la opción Real-Time
Windows Target

44
Figura 1.8.11 System target file
15. Dar click en OK.
16. La ventana se tendrá que ver de la siguiente manera (Figura 1.8.12)
Figura 1.8.12 Configuración resultante la ventana Real-Time Workshop
17. Dar click en OK.
18. En la ventana de simulación damos doble click en el bloque scope y hacemos click
en el botón parameters. (Ver Figura 1.8.13)
Figura 1.8.13 Parámetros del osciloscopio
45
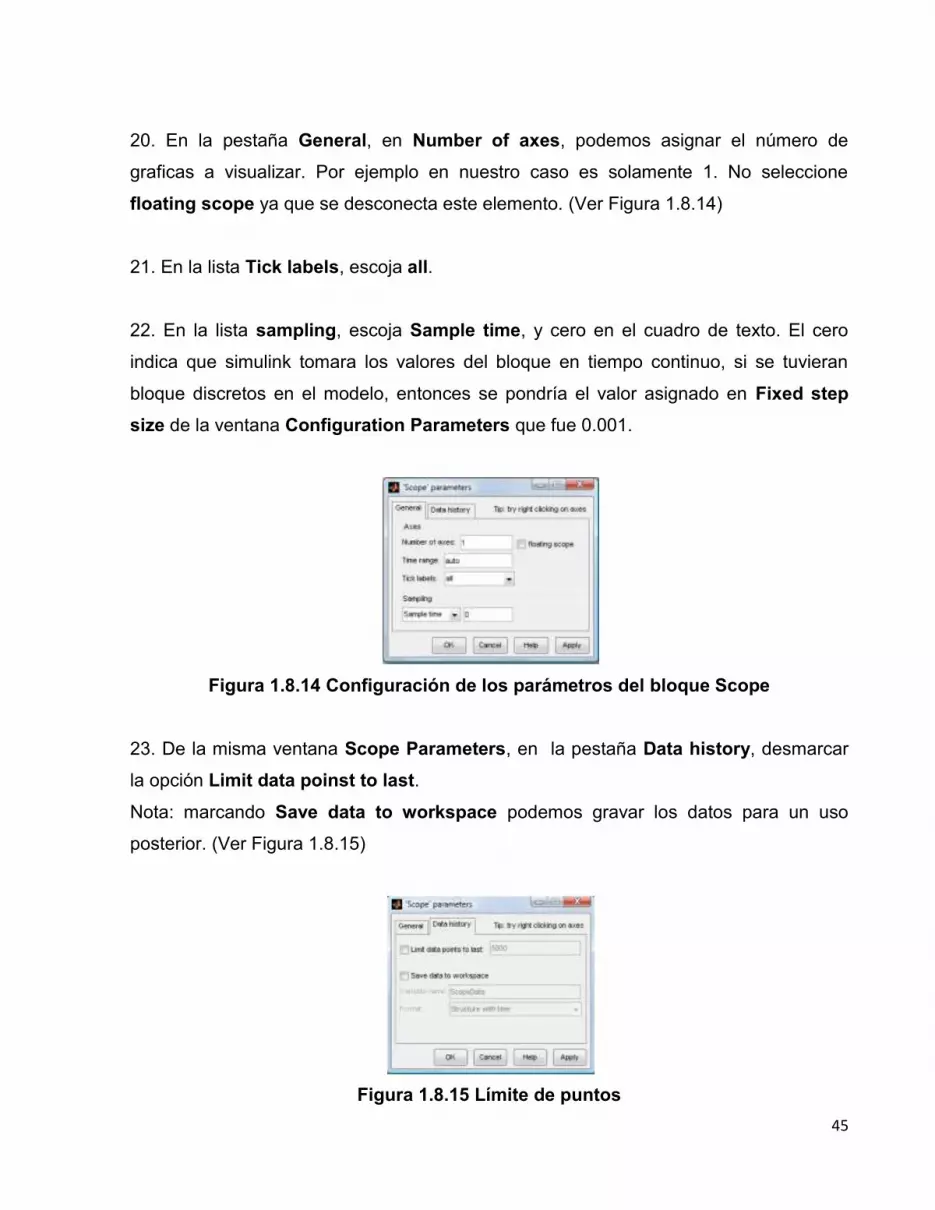
20. En la pestaña General, en Number of axes, podemos asignar el número de
graficas a visualizar. Por ejemplo en nuestro caso es solamente 1. No seleccione
floating scope ya que se desconecta este elemento. (Ver Figura 1.8.14)
21. En la lista Tick labels, escoja all.
22. En la lista sampling, escoja Sample time, y cero en el cuadro de texto. El cero
indica que simulink tomara los valores del bloque en tiempo continuo, si se tuvieran
bloque discretos en el modelo, entonces se pondría el valor asignado en Fixed step
size de la ventana Configuration Parameters que fue 0.001.
Figura 1.8.14 Configuración de los parámetros del bloque Scope
23. De la misma ventana Scope Parameters, en la pestaña Data history, desmarcar
la opción Limit data poinst to last.
Nota: marcando Save data to workspace podemos gravar los datos para un uso
posterior. (Ver Figura 1.8.15)
Figura 1.8.15 Límite de puntos

46
24. Dar click en OK.
25. En la ventana de simulación; en la barra de menú Tools seleccionar External
mode control panel. (Ver Figura 1.8.16)
Figura 1.8.16 Tools/ External mode control panel
26. Dar click en el boton Signal & triggering. En esta parte se configuran el número de
datos adquiridos que presentan los bloques Scope y que almacenan los bloques To
Workpace.
27. En el recuadro Duration se pondrá el número de puntos que se graficarán, por
ejemplo si se asignó una velocidad de muestreo de 1000 muestras/segundo, es decir
un muestreo de 0.001segundos, y además si el tiempo de simulación es 10 segundos,
en este recuadro se pondrá 10000 (ver Figura 1.8.17).
Figura 1.8.17 Cantidad de puntos a graficar

47
28. Presionar Apply y después close. Luego, dar click en close en la ventana External
mode control panel.
29. En la barra de tareas de la ventana de simulación, damos click en el menú Tools,
señalamos Real-Time Workshop, y damos click en Build Model. Con esto se ordena
la construcción del modelo diseñado, El proceso de construcción se puede observar en
la pantalla del Matlab mediante mensajes, como se aprecia en la Figura 1.8.18.
Figura 1.8.18 Construcción del modelo
31.-Conecte un generador de funciones en paralelo con un osciloscopio a la entrada
A/D0 de la Tarjeta de adquisición de datos. Conecte una terminal de tierra analógica
(AGND) de la tarjeta al común del osciloscopio y del generador de funciones.
30. Al finalizar la construcción del modelo, en la barra de tareas de la ventana de
simulación escogemos modo External, damos click en el icono Connect To Target
y finalmente damos click en Start Real-Time Code .

48
Resultados:
Se manda una señal senoidal a 40Hz desde el generador de funciones
Figura 1.8.19 Adquisición de señal senoidal a 40Hz
Se manda una señal diente de sierra a 40Hz del generador de funciones
Figura 1.8.20 Adquisición de señal diente de sierra a 40Hz

49
Generación de Señales Analógicas:
Es básicamente el mismo procedimiento que en la adquisición de datos de una señal analógica.
1. Conecte un osciloscopio a la salida analógica (D/A) de la Tarjeta de adquisición de datos,
para corroborar que la salida corresponda a la que enviamos. En nuestro caso la tarjeta PCL-
711B tiene solo 1 canal de salida analógica.
2. Se crea un modelo nuevo en Simulink. De la librería Real-Time Windows Target seleccione y
arrastre el bloque Analog Output, el cual permitirá la salida de datos analógicos.
Adicionalmente, agregamos una función senoidal para visualizarla en el osciloscopio.
Figura 1.8.21 Modelo para la generación de señal
Nota: Se agrega un punto de suma y un bloque de una constante para desplazar verticalmente
la senoidal una unidad. Esto con el fin de que aparezca en la pantalla del osciloscopio la
senoidal completa, dado que la tarjeta no puede suministrar voltajes negativos.
3. Debemos configurar el bloque Analog Output, damos doble click en él y aparecerá la
pantalla siguiente (Figura 1.8.22)

50
Figura 1.8.22 Parámetros del bloque de salida
4. Debemos seleccionar la tarjeta de adquisición de datos instalada en la computadora. Damos
click en Install new board, buscamos la marca y el modelo de la tarjeta.
5. Pulse Test para verificar el estado de la tarjeta; en caso de estar en perfecto estado envía un
mensaje con la ventana mostrada (Figura 1.8.23)
Figura 1.8.23. Verificación de la salida de la tarjeta
6. En esa ventana pulsamos OK y regresamos a ventana de configuración. Ahora configuramos
el período de muestreo a utilizar y los canales a utilizar de salida de datos analógicos. En
nuestro caso en Sample time de 0.001 segundos y en Output Channels escribimos 1 para
usar el único canal D/A. Escogemos el rango de entrada en este caso 0V a10V. Con cualquier
valor inicial y valor final soportado por la tarjeta. En nuestro caso asignamos cero en los dos
(ver Figura 1.8.24)

51
Figura 1.8.24 Configuración de parámetros de bloque de salida finalizada
Finalizamos pulsando OK. Aparecerá en el modelo del proyecto el bloque Analog Input
indicando la tarjeta seleccionada (Figura 1.8.25)
Figura 1.8.25 Modelo con bloque configurado
A continuación se reproducen los pasos del 8 al 30 descritos en la adquisición de datos de una
señal analógica.

52
Resultados
Desde el bloque de función senoidal se manda una señal a una frecuencia angular 60
rad/s
Figura 1.8.26. Señal de salida vista en el osciloscopio

53
1.8.4 Prácticas con la tarjeta PCL-711B
En este epígrafe se controlaran dos plantas un motor-tacogenerador y el sistema
barra-bola del sistema SRV2 de la marca Lav-Volt (ver Figuras 1.8.27-1.8.29)
Figura 1.8.27 Sistema SRV2 de Lab-Volt
Figura 1.8.28 Sistema Barra-Bola
Figura 1.8.29 Sistema Motor-Tacogenerador

54
1.8.4.1 Determinación de parámetros del motor-tacogenerador
Equipo utilizado:
Multímetro
Tacómetro digital
Dinamómetro de resorte
Tarjeta de adquisición de datos PCL-711B
Lista de Parámetros a identificar:
Ra = Resistencia del devanado de armadura [Ω]
ke = constante contraelectromotriz [V/rad/s]
kT = Constante de par [N-m/A]
Jm = Inercia del rotor y eje del motor [Kg-m-s2]
Jc = Inercia del disco [Kg-m-s2]
Je = Inercia de cada engrane externo [Kg-m-s2]
bm = Constante viscosa del motor [N-m/rad/s]
bp = Constante viscosa del potenciómetro [N-m/rad/s]
kg =Constante de voltaje de tacogenerador [V/rad/s]
t0 =Constante de tiempo mecánico [s]
Determinación de ke y kg
Para determinar la constante ke, se utilizó el tacómetro para medir directamente la
velocidad angular del motor; es decir, se le aplico un voltaje Va al motor y se midió
su velocidad angular externa respectiva. Así como la corriente eléctrica. Para
determinar kg, se midió el voltaje de salida en las terminales del tacogenerador.
Las mediciones del tacómetro y del multímetro se hicieron en estado estacionario.
En primer lugar, se debe conocer el valor de la resistencia del devanado del motor
Ra. Esta se puede medir con el multímetro directamente de las terminales del
motor, y en nuestro caso resulto:

55
Ra= 9.6 [Ω]
Para la determinación de ke y kg se debe conectar el motor-tacogenerador como
se muestra en la Figura 1.8.30
Figura 1.8.30 Conexión del motor en lazo abierto
Se debe tener en cuenta la representación interna del motor como se ilustra en
Figura 1.8.31
Figura 1.8.31 Circuito eléctrico del motor
De acuerdo a la ley de voltajes de Kirchhoff, tenemos que
(1.8.1)
donde ve es la fuerza contraelectromotriz del motor.
+ 12V Vg
VaPotenciometro
de 1 K
Power
AMP

56
La ecuación (1.8.1) en estado estacionario resulta ser:
y despejando ve queda
Finalmente, despejando ke de la ecuación anterior tenemos:
(1.8.2)
Por otra parte, se tiene que el voltaje generado por el tacogenerador es
directamente proporcional a la velocidad angular del motor. Esto es,
.
Por tanto, reescribiendo esta ecuación, queda
. (1.8.3)
Dado que solo podemos medir la velocidad angular del motor externamente,
tenemos que tener en cuenta la relación de engranes interna, por lo tanto tenemos
que:
(1.8.4)
donde ω1 es la velocidad angular del engrane externo.
Sustituyendo (1.8.4) en (1.8.2) y (1.8.3), resulta:
(1.8.5)
(1.8.6)
57
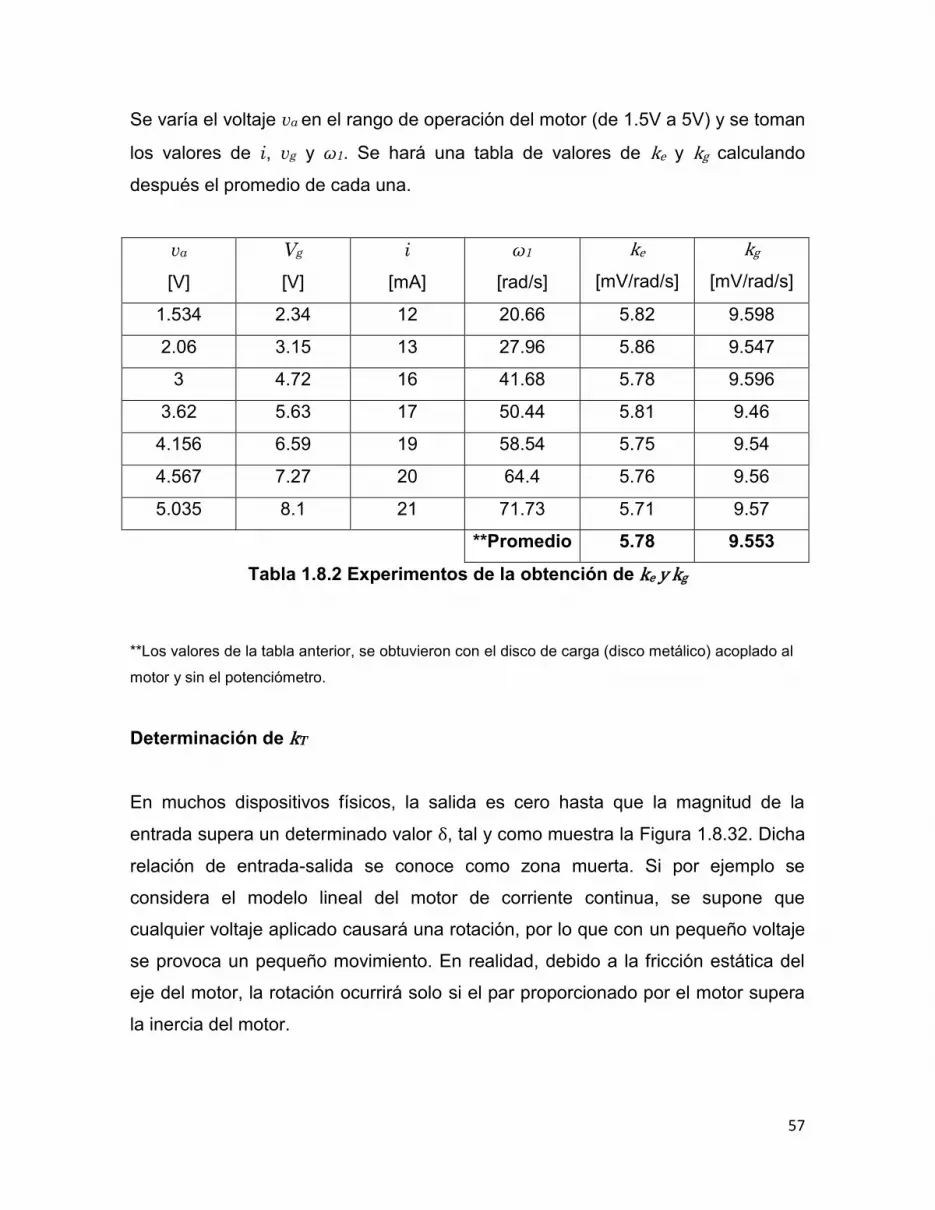
Se varía el voltaje va en el rango de operación del motor (de 1.5V a 5V) y se toman
los valores de i, vg y ω1. Se hará una tabla de valores de ke y kg calculando
después el promedio de cada una.
va
[V]
Vg
[V]
i
[mA]
ω1
[rad/s]
ke
[mV/rad/s]
kg
[mV/rad/s]
1.534 2.34 12 20.66 5.82 9.598
2.06 3.15 13 27.96 5.86 9.547
3 4.72 16 41.68 5.78 9.596
3.62 5.63 17 50.44 5.81 9.46
4.156 6.59 19 58.54 5.75 9.54
4.567 7.27 20 64.4 5.76 9.56
5.035 8.1 21 71.73 5.71 9.57
**Promedio 5.78 9.553
Tabla 1.8.2 Experimentos de la obtención de ke y kg
**Los valores de la tabla anterior, se obtuvieron con el disco de carga (disco metálico) acoplado al
motor y sin el potenciómetro.
Determinación de kT
En muchos dispositivos físicos, la salida es cero hasta que la magnitud de la
entrada supera un determinado valor δ, tal y como muestra la Figura 1.8.32. Dicha
relación de entrada-salida se conoce como zona muerta. Si por ejemplo se
considera el modelo lineal del motor de corriente continua, se supone que
cualquier voltaje aplicado causará una rotación, por lo que con un pequeño voltaje
se provoca un pequeño movimiento. En realidad, debido a la fricción estática del
eje del motor, la rotación ocurrirá solo si el par proporcionado por el motor supera
la inercia del motor.

58
Figura 1.8.32 No linealidad de zona muerta
Es importante tener en cuenta lo anterior para la medición de kT, ya que los datos
obtenidos son confiables una vez superado el rango de la zona muerta.
Para la obtención de kT, considere la Figura 1.8.33
Figura 1.8.33 Esquema para determinar kT
El objetivo es medir estáticamente el valor de F del dinamómetro por cada valor de
corriente que medimos. Por cada valor de F, conociendo el radio R del engrane se
puede encontrar el par en el eje del engrane. Esto es,
Por otro lado recordando (1.7.15)
+ 12V
VaPotenciometro
de 1 K
Power
AMP
Engrane
Dinamometro
R
F

59
así como también la relación de engranes
Tenemos que:
(1.8.7)
donde
Se modificará el voltaje va y se tomará lectura de la fuerza F y la corriente i. Los
datos obtenidos se muestran en la Tabla 1.8.3, donde se ha considerado (1.8.7)
para encontrar kT.
F
[N]
i
[mA]
kT
[mN/A]
0.196 85 4.96
0.392 167 5.05
0.49 206 5.12
0.686 301 4.9
0.98 413 5.2
Promedio 5.04
Tabla 1.8.3 Experimentos de la obtención de kT
Determinación de bm y bp
Primero se determina b dado por (1.7.13) como
Cabe recordar que esta ecuación corresponde al caso cuando el motor trabaja
acoplado al potenciómetro.
60
Los datos obtenidos se desprenden de (1.7.11), esto es
donde se considera , dado que las pruebas se hicieron en estado
estacionario, así como =0, ya que en las pruebas no se contemplo alguna
perturbación.
.
La ecuación anterior en el dominio del tiempo queda:
(1.8.8)
Despejando b de (1.8.8), queda
(1.8.9)
Dado que solo podemos medir la velocidad angular del motor externamente,
tenemos que tener en cuenta la relación de engranes interna, por lo tanto tenemos
que:
donde ω1 es la velocidad angular del engrane externo.
Recordamos también que
la cual, sustituyéndola en (1.8.9) resulta
. (1.8.10)
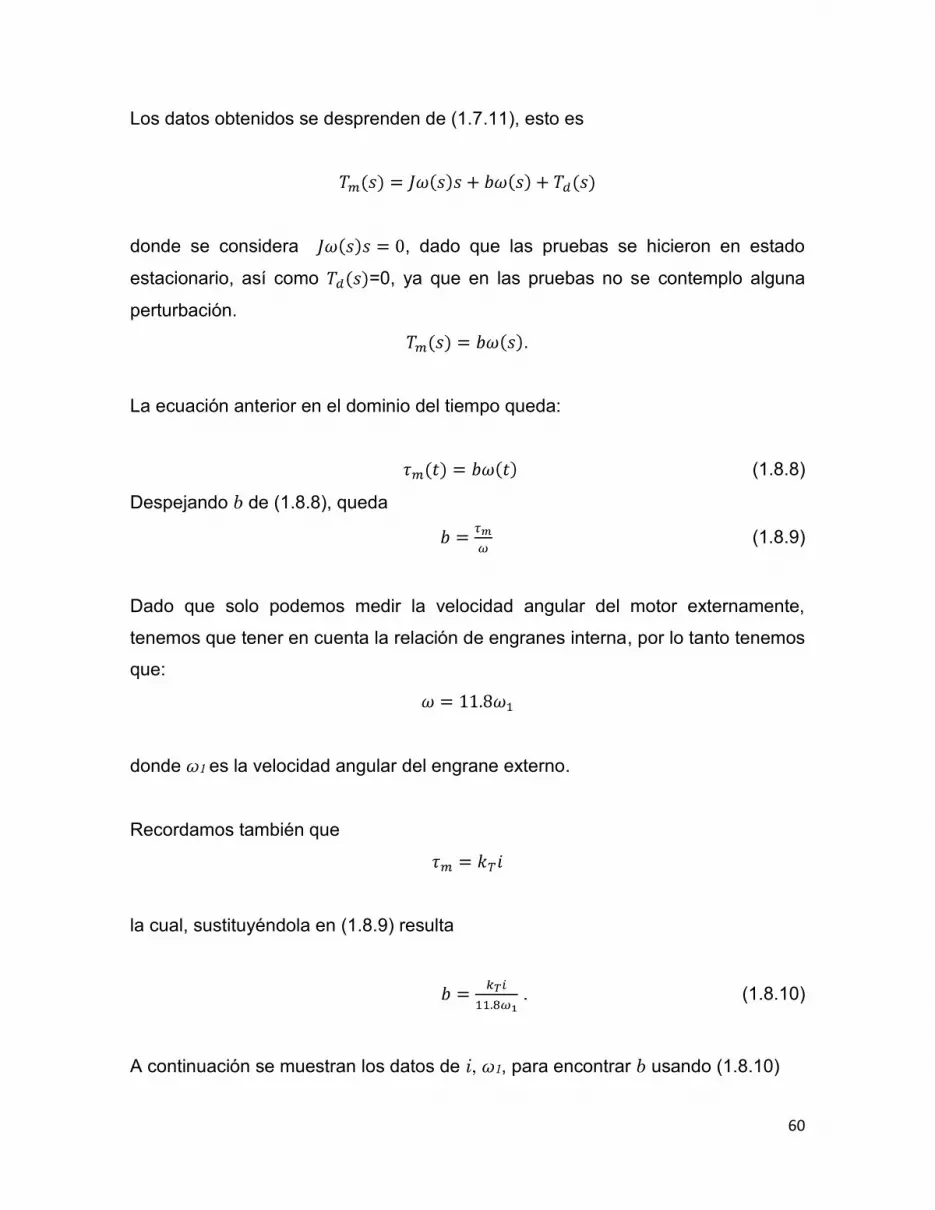
A continuación se muestran los datos de i, ω1, para encontrar b usando (1.8.10)
61
va
[V]
i
[mA]
ω1
[rad/s]
b
[N-m/rad/s]
x10-7
2.051 34 25.13 5.77
2.536 36 31.99 4.8
3.206 39 41.36 4.03
3.602 40 46.9 3.64
4.076 41 53.93 3.24
4.542 43 60.63 3.03
Promedio 4.085
Tabla 1.8.4. Experimentos para la obtención de b
Comentario: La constante b es válida en el rango de 25 rad/s a 60 rad/s. Esto
debido a que el efecto de fricción aumenta en forma no lineal su valor a bajas
velocidades.
Para determinar bm se repite el procedimiento anterior, solo que ahora los datos
serán del sistema motor-tacogenerador con el potenciómetro desconectado.
Por lo tanto, podemos usar los datos de la Tabla 1.8.2 de i, ω1 y kT, junto con
(1.8.10) para generar la siguiente tabla.
va
[V]
i
[mA]
ω1
[rad/s]
bm
[N-m/rad/s]
x10-7
1.534 12 20.66 2.48
2.06 13 27.96 1.98
3.14 16 41.68 1.64
3.62 17 50.44 1.44
4.156 19 58.54 1.38
4.567 20 64.4 1.33
Promedio 1.7
Tabla 1.8.5 Experimentos en la obtención de bm

62
Considerando b y bm en (1.7.13) obtenemos bp como
[Nm s/rad]
Determinación de t0
Se usará la tarjeta PCL-711B y la Toolbox Real Time Windows Target (RTWIN) de
Matlab para leer la respuesta del motor mediante la salida del tacogenerador.
En el motor-tacogenerador no se considera la carga mecánica acoplada al motor
(disco metálico), ni el potenciómetro. Dado que el modelo de motor-tacogenerador
es un sistema de primer orden, se espera una curva como respuesta similar a la
mostrada en la Figura 1.8.34.
Figura 1.8.34 Respuesta de un sistema de primer orden
El procedimiento consiste en medir mediante la tarjeta PCL-711B, la respuesta del
sistema, para encontrar la constante de tiempo t, que se define como:
El tiempo necesario para que la respuesta alcance el 63.2% del valor máximo de
el valor final.

63
La Figura 1.8.35 muestra el modelo para adquisición de datos mediante la toolbox
RTWIN en SIMULINK.
Figura 1.8.35 Adquisición de datos usando la librería RTWIN en SIMULINK
La Figura 1.8.36a muestra la respuesta del sistema en lazo abierto a una entrada
escalón de 2V.
a) b)
Figura 1.8.36 Repuesta del sistema motor-tacogenerador a una entrada
escalón de 2V
Se puede apreciar que el valor máximo es 3.1V lo que implica que el 63.2% es
1.96V. En la figura 1.8.36b se muestra un acercamiento de la gráfica mostrada en
la figura 1.8.36a, con el fin de ver claramente el tiempo correspondiente a 1.96V,
el cual es aproximadamente 1.0275s.

64
Dado que el tiempo inicial de la excitación de la señal es 1s, tenemos que
Determinación de Jm
Si consideramos que
podemos despejar Jm, ya que se conocen todos los demás parámetros, esto es
(1.8.11)
Determinación de Jc y Je
Para calcular el momento de inercia tanto de los engranes como de la carga
inercial externa, se han considerado a las engranes como discos con densidad
uniforme.
Figura 1.8.37 Disco de densidad uniforme
La fórmula para calcular el momento de inercia de un disco como el de la figura
1.8.37 es [5]
(1.8.12)

65
Para el momento de inercia Jc (disco metálico):
R1=3.15mm
R2=25.4mm
m= 76.8g
Para el momento de inercia cada engrane:
R1=3.15mm
R2=25.4mm
m=12.5g
Por tanto, sustituyendo los valores anteriores en (1.8.12), obtenemos
Jc=25.15x10-6 ,
Je=4.09x10-6 .

66
Resultados Experimentales
A continuación se listan los valores de cada uno de los parámetros del motor-
tacogenerador.
Parámetro Nuevo Valor
encontrado
Valor del manual
Lab-Volt
Ra [Ω] 9.6 8.6
ke [V/rad/s] 5.78x10-3 5.25x10-3
kT [N-m/A] 5.04x10-3 5.222x10-3
Jm [Kg-m-s2] 8.78x10-8 8.468x10-8
Jc [Kg-m-s2] 25.15x10-6 No proporcionado
Je [Kg-m-s2] 4.09x10-6 No proporcionado
bm [N-m/rad/s] 1.7x10-7 No proporcionado
bp [N-m/rad/s] 3.53x10-5 No proporcionado
kg [V/rad/s] 9.55x10-3 9.55x10-3
t0 [s] 27.5x10-3 27x10-3
Tabla 1.8.6 Parámetros del motor-tacogenerador
Se hizo un experimento en lazo abierto con el motor sin carga y sin potenciómetro,
es decir Je=0, Jc=0 y bp=0 tomando en cuenta (1.7.21), obtenemos
donde

67
Usando los parámetros de la segunda columna de la Tabla 1.8.6 resulta:
(1.8.13)
El experimento consistió en obtener datos de la salida del tacogenerador mediante
la tarjeta PCL-711B, los cuales fueron comparados con la función de transferencia
(1.8.13). Note en la ventana de simulación de la Figura 1.8.38 que se le agrego la
constante del tacómetro a la función de transferencia para que la salida este dada
en volts.
Figura 1.8.38 Diagrama de bloques para la comparación de la respuesta del
motor-tacogenerador y la del nuevo modelo ante una entrada escalón
Figura 1.8.39 Bloque Analog Ouput

68
Nota: Para controlar el motor-tacogenerador ó el sistema barra bola del sistema
SRV2 se conectan los cables de la tarjeta en la entrada trasera del sistema SRV2.
Una vez elaborado un modelo en simulink como en la Figura 1.8.38, el bloque
analog ouput se configura como se muestra en la Figura 1.8.39, dando valor
inicial y final de 4.7V, ya que el voltaje en el convertidor de nivel de sistema SRV2
es de -4.7V, con esto el voltaje inicial y final en la salida del convertidor de nivel
del sistema SRV2 será:
4.7- 4.7= 0V
En la Figura 1.8.40 podemos ver que la respuesta del nuevo modelo tiene
aproximadamente la misma forma.
Figura 1.8.40 Respuesta real vs simulación (nuevo modelo)
En la Figura 1.8.40 se aprecia en línea continua la respuesta real del sistema
motor-tacogenerador y en línea discontinua la respuesta de nuestro modelo
matemático.

69
Finalmente, en la Figura 1.8.41 se muestra una comparación entre el modelo del
motor-tacogenerador con los valores obtenidos, el modelo con los valores
proporcionados por el manual Lab-Volt y la respuesta real del sistema, donde el
modelo con los valores proporcionado por el manual es:
(1.8.14)
Figura 1.8.41 Comparación entre la respuesta real, el nuevo modelo y el
modelo Lab-Volt

70
1.8.4.2 Control de velocidad del motor-tacogenerador
En este epígrafe se presenta la práctica 5 del manual de prácticas del sistema SRV2 de Lab-Volt. El control se hará con el uso de la tarjeta adquisitora de datos PCL-711B, mediante MATLAB-SIMULINK y la librería Real Time Windows Target (RTWIN). Recordamos la función de transferencia dada en (1.7.21)
(1.8.15)
donde
En esta práctica el motor tiene acoplada carga, por tanto tenemos de (1.7.12) y
(1.7.13)
Los valores de (1.8.15) vienen dados en la Tabla 1.8.6.
En la siguiente practica la entrada y la salida están dadas en volts, por lo que 1v en la salida de tacogenerador representa a 104.7 rad/s del motor. Con un tacómetro podemos medir la velocidad del engrane externo, donde la relación de engranes es 11.8:1. Considerando (1.7.12), (1.7.13) y los valores de la Tabla 1.8.6 en (1.8.15) resulta la siguiente función de transferencia para el motor con carga.
(1.8.16)

71
A continuación se muestra el diagrama de bloques del sistema motor-
tacogenerador usando (1.8.16) y el valor de la constante del tacogenerador kg de la Tabla 1.8.6.
Figura 1.8.42 Diagrama de bloques del Motor-Tacogenerador
El sistema en lazo abierto del sistema de la Figura 1.8.42 es,
(1.8.17)
En la practica 5 se agrega un compensador en atraso al sistema de la figura
1.8.42 mediante un amplificador operacional (ver Figura 1.8.43)
(1.8.18)
donde
Figura 1.8.43 Amplificador operacional

72
Los valores que propone el manual son los siguientes
Experimento 1 Experimento 2 Experimento 3 Experimento 4
R1 50 kΩ 50 kΩ 50 kΩ 50 kΩ
R2 50 kΩ ∞ ∞ ∞
C1 470 pF 470 pF 470 pF 470 pF
C2 47 µF 47 µF 10 µF 1 µF
Tabla 1.8.7 Parámetros del amplificador operacional para cada experimento
Para hacer que R2 = ∞, en el amplificador operacional del sistema se desconecta
R2 mediante un interruptor.
Experimento 1 Experimento 2 Experimento 3 Experimento 4
Función de
transferencia del compensador
Tabla 1.8.8 Funciones de transferencia del compensador por experimento
En la Tabla 1.8.8 se muestran las funciones de transferencia del compensador
correspondientes a cada experimento de la práctica.
En el experimento 2 al hacer R2 = ∞ el compensador se reduce a un control PI
dado por la siguiente estructura
Experimento 1
Figura 1.8.44 Diagrama de bloques del experimento 1

73
Encontramos que
Se observa que el sistema es de tipo 01 por tanto podemos aplicar el teorema del valor final para encontrar el error en estado estacionario. Encontramos
donde Kp está definida como la constante de error de posición estática [1] (cap. 5, pág. 289)
por tanto el error en estado estacionario para una entra escalón de magnitud A es
Para una entrada escalón de A=4 volts tenemos que
El tiempo de asentamiento Ts se define como el tiempo necesario para que el
sistema se estabilice dentro de cierto porcentaje [2]. Para el criterio del 2% del
valor final tenemos que
(1.8.19)
Elaborando el diagrama del lugar de las raíces para el sistema podemos encontrar
los datos necesarios para encontrar el tiempo de asentamiento. En seguida
mostramos los comandos de Matlab para obtener el lugar de las raíces, mostrado
en la Figura 1.8.45.
>> num=[15.32];
>> den=[1 10.57];
>> num2=[0.01 0.425]; >> den2=[1 0.425]; >> G=tf(num,den); >> G2=tf(num2,den2); >> Gm=G*G2; >> rlocus(Gm)
1 Un sistema de control se denomina de tipo 0, tipo 1 y tipo 2 si N=0, N=1 y N=2 respectivamente en la
función de transferencia en lazo abierto [1]
74
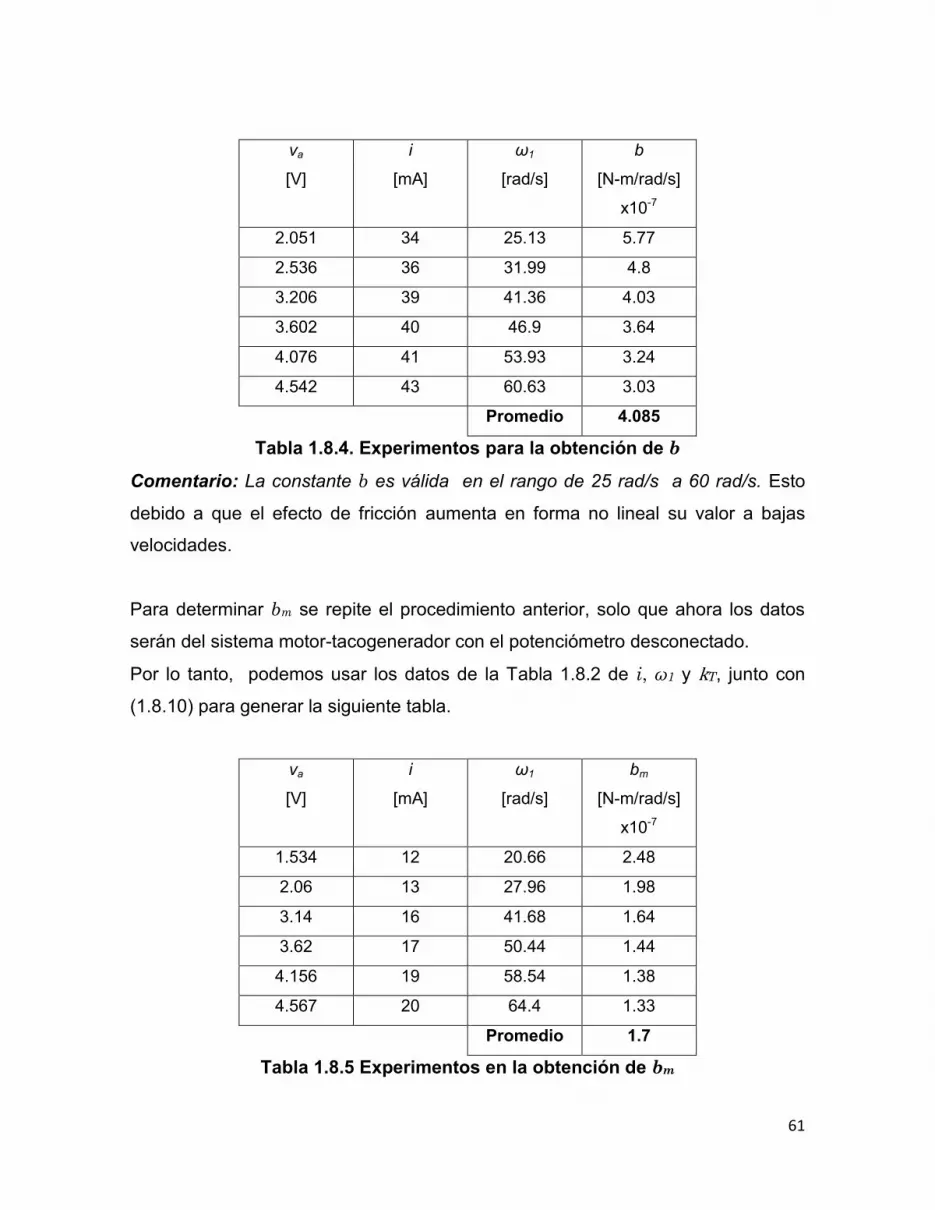
Figura 1.8.45 Lugar de las raíces para el sistema del experimento 1
De la Figura 1.8.45 tenemos
Por tanto, sustituyendo estos valores en (1.8.19), obtenemos
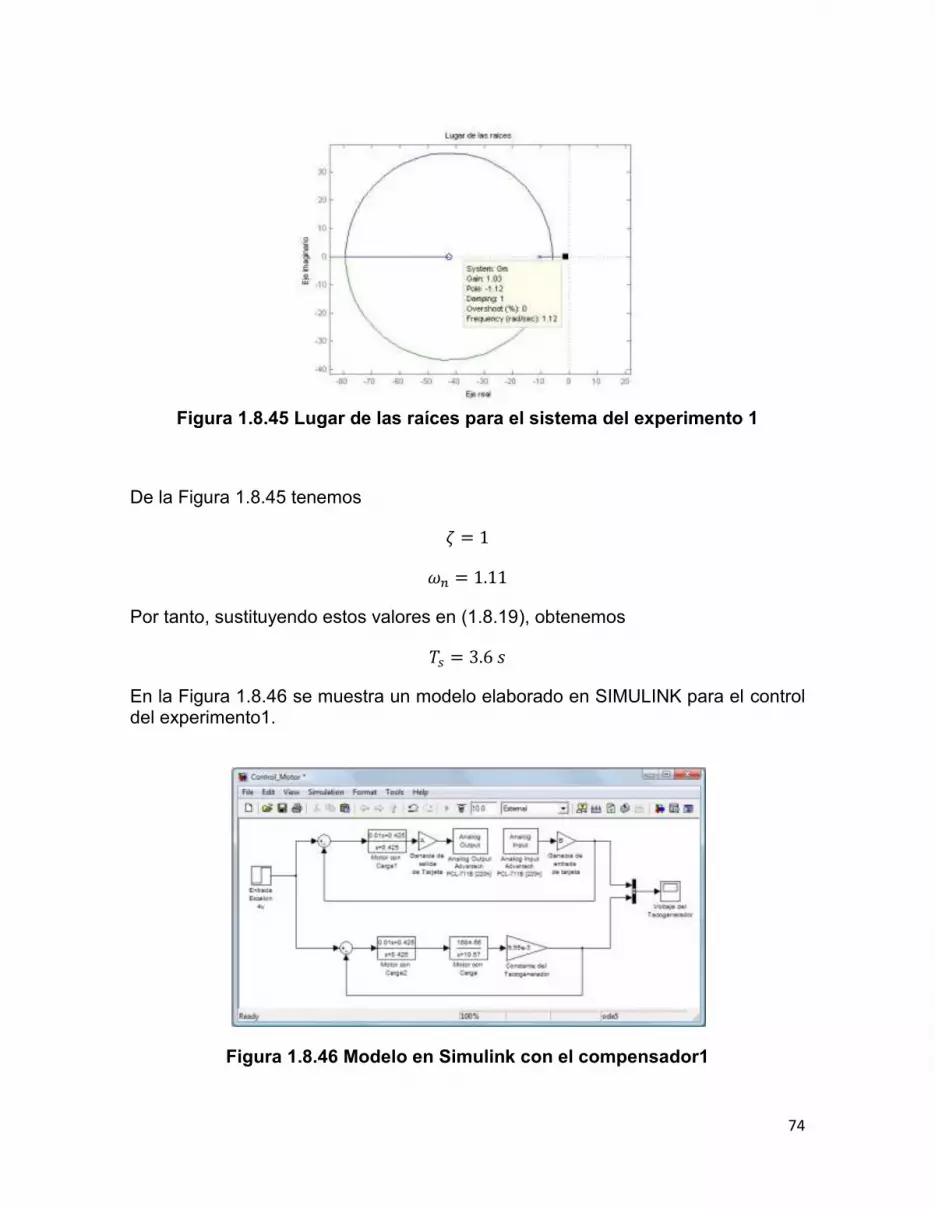
En la Figura 1.8.46 se muestra un modelo elaborado en SIMULINK para el control del experimento1.
Figura 1.8.46 Modelo en Simulink con el compensador1

75
Nota: la salida se configura como en la Figura 1.8.39
Se espera que la respuesta del sistema motor-tacogenerador tenga una repuesta
con un tiempo de asentamiento de 3.6 s y un error de 1.6 V.
Resultados del experimento1:
Figura 1.8.47 Respuesta del sistema con el compensador1
Figura 1.8.48 Error del sistema con el compensador1
En las Figuras 1.8.47 y 1.8.48 se pueden ver que el error en estado estacionario
es 1.6V que coincide con el valor antes calculado. Así también el tiempo de
asentamiento que es alrededor de 3.6s usando el criterio del 2%.
76
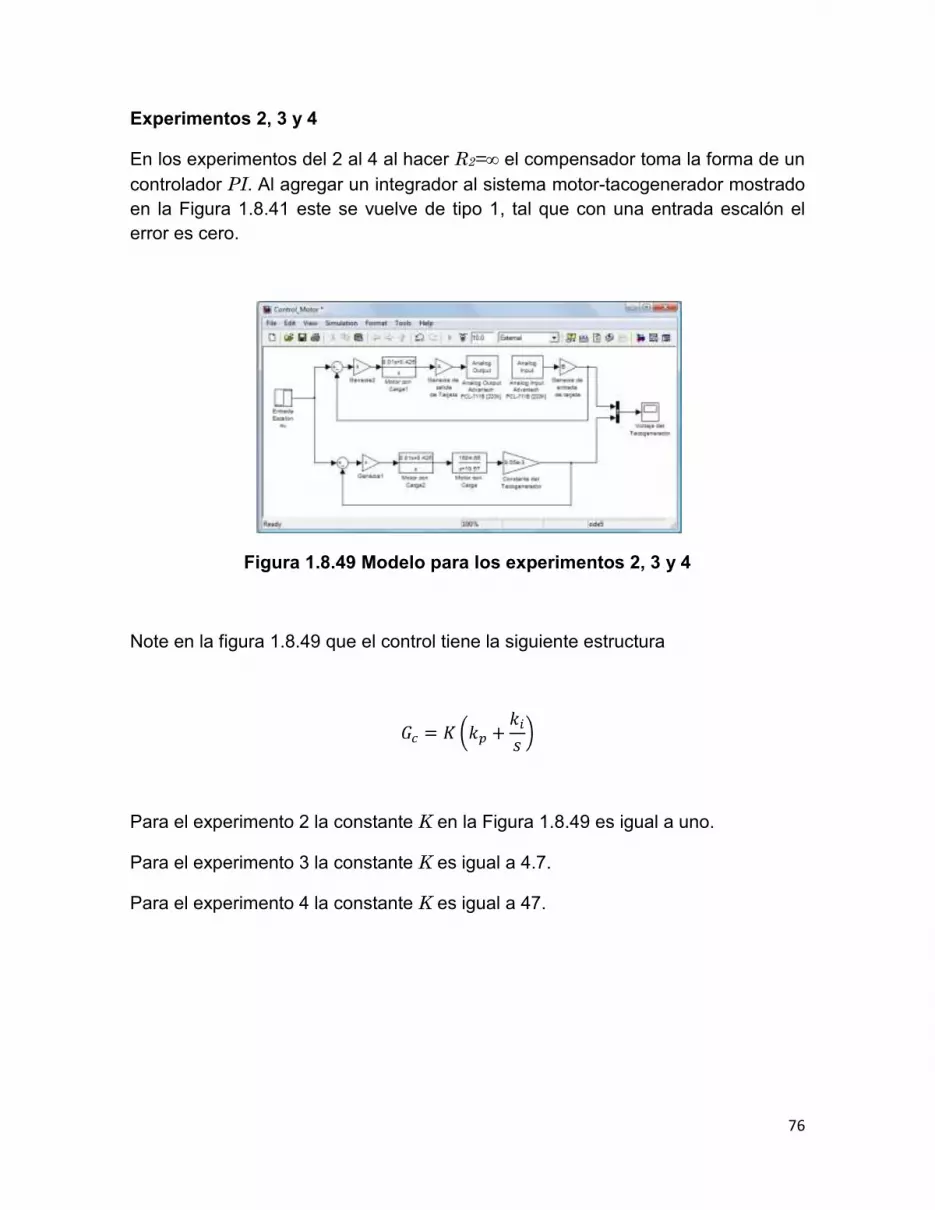
Experimentos 2, 3 y 4
En los experimentos del 2 al 4 al hacer R2=∞ el compensador toma la forma de un
controlador PI. Al agregar un integrador al sistema motor-tacogenerador mostrado
en la Figura 1.8.41 este se vuelve de tipo 1, tal que con una entrada escalón el
error es cero.
Figura 1.8.49 Modelo para los experimentos 2, 3 y 4
Note en la figura 1.8.49 que el control tiene la siguiente estructura
Para el experimento 2 la constante K en la Figura 1.8.49 es igual a uno.
Para el experimento 3 la constante K es igual a 4.7.
Para el experimento 4 la constante K es igual a 47.
77
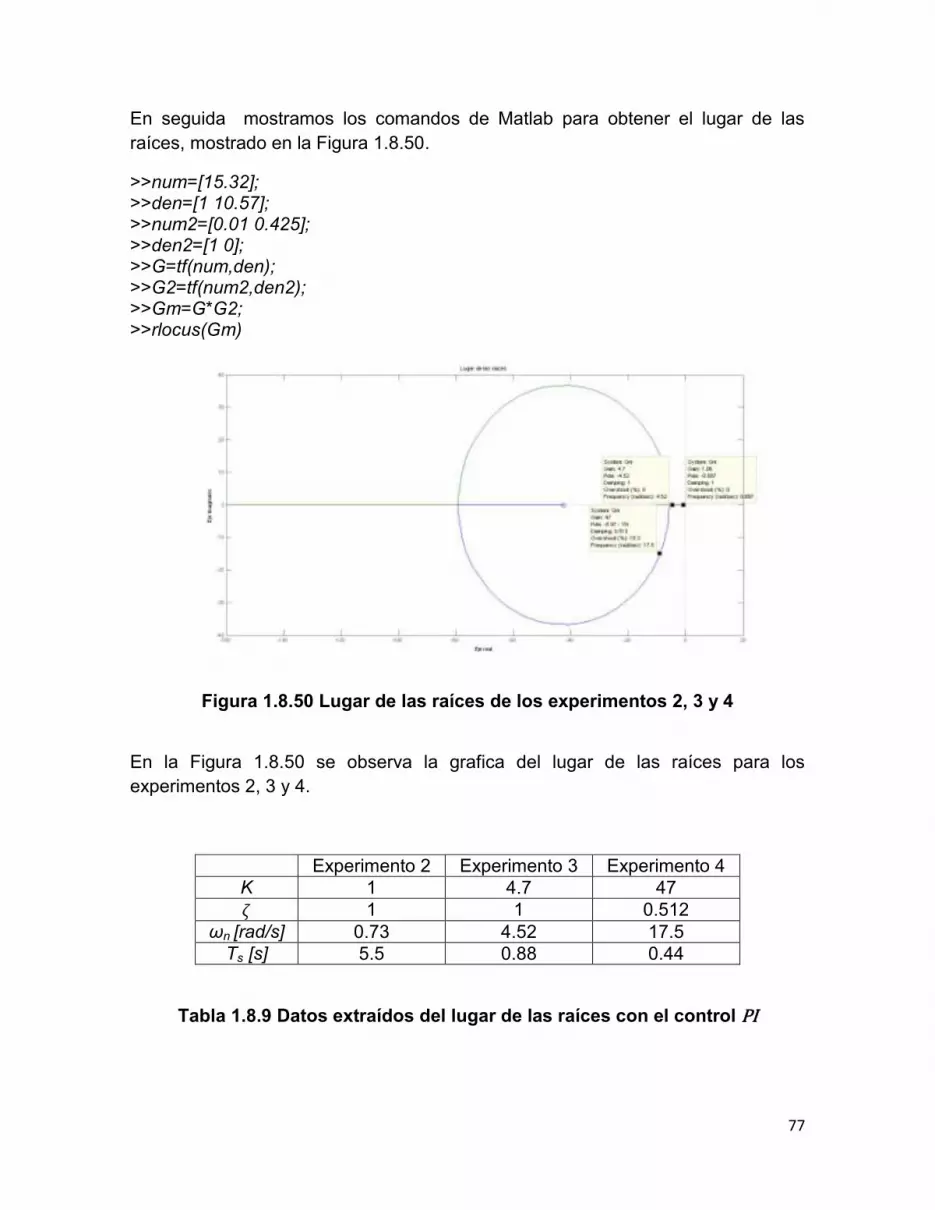
En seguida mostramos los comandos de Matlab para obtener el lugar de las
raíces, mostrado en la Figura 1.8.50.
>>num=[15.32]; >>den=[1 10.57]; >>num2=[0.01 0.425]; >>den2=[1 0]; >>G=tf(num,den); >>G2=tf(num2,den2); >>Gm=G*G2; >>rlocus(Gm)
Figura 1.8.50 Lugar de las raíces de los experimentos 2, 3 y 4
En la Figura 1.8.50 se observa la grafica del lugar de las raíces para los
experimentos 2, 3 y 4.
Experimento 2 Experimento 3 Experimento 4
K 1 4.7 47
1 1 0.512
ωn [rad/s] 0.73 4.52 17.5
Ts [s] 5.5 0.88 0.44
Tabla 1.8.9 Datos extraídos del lugar de las raíces con el control PI
78
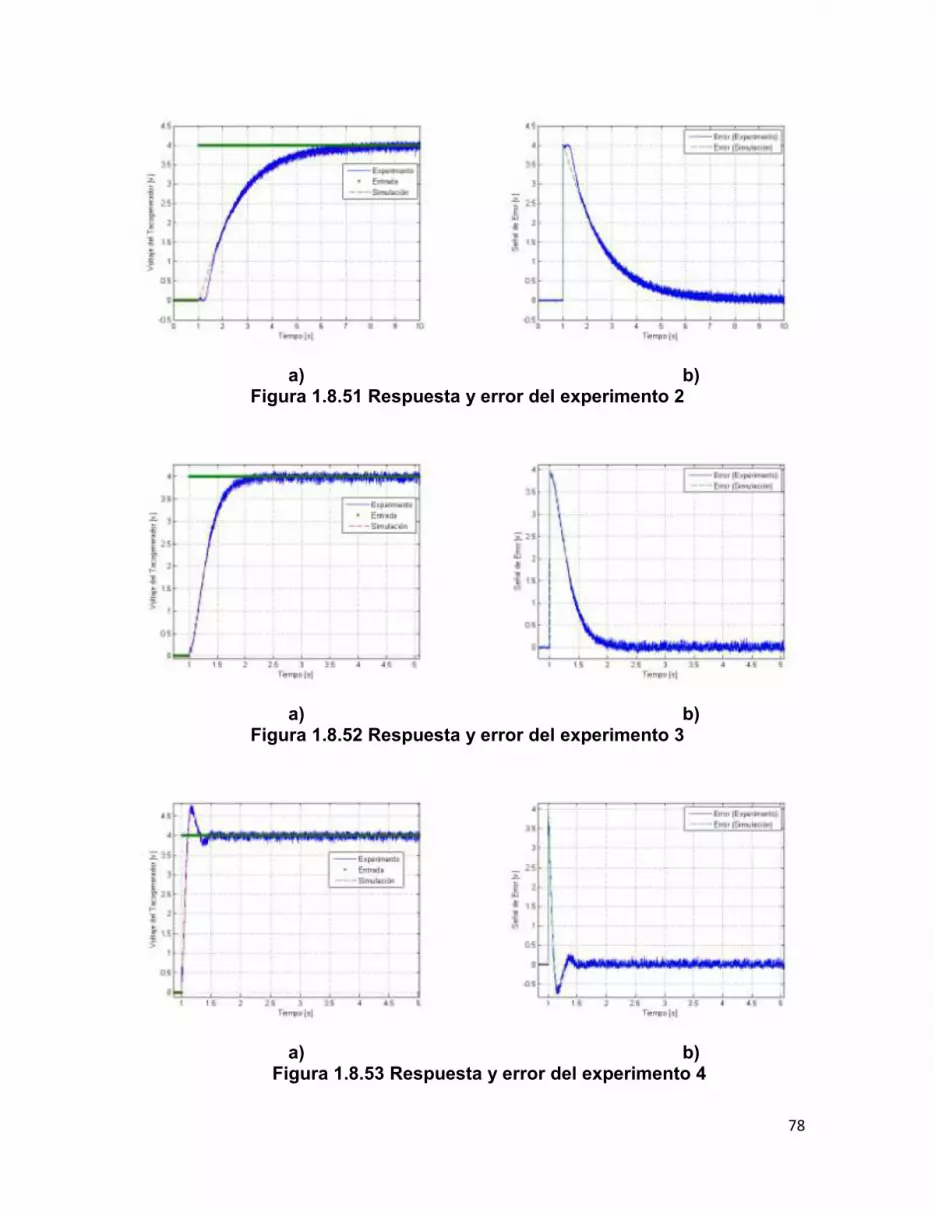
a) b) Figura 1.8.51 Respuesta y error del experimento 2
a) b) Figura 1.8.52 Respuesta y error del experimento 3
a) b) Figura 1.8.53 Respuesta y error del experimento 4

79
De las figuras 1.8.49, 1.8.50 y 1.8.51 podemos corroborar los resultados teóricos y
concluir que el sistema se comporto como estaba predicho.
Experimento Valor teórico Experimento
2 5.5 5.5
3 0.88 0.88
4 0.44 0.44
Tabla 1.8.10 Tiempo de asentamiento Ts de los experimentos del 2 al 4
1.8.4.3 Control del sistema Barra-Bola
El sistema barra-bola, (ver la figura 1.8.28) consta de dos barras paralelas de metal
unidas en el extremo izquierdo por un pivote fijo y en el extremo derecho (vista frontal)
por una barra metálica la cual se encuentra unida al motor mediante un par de
engranes. Por lo tanto la barra puede modificar su ángulo. La bola se desplazará por el
riel formado por las barras paralelas metálicas. En una barra se encuentra un
potenciómetro variable que nos permite, a través de la impedancia de la barra al
desplazarse la esfera, conocer su posición, es decir, el potenciómetro es un sensor
lineal de posición. La barra tiene una longitud de 40.5 cm.
Para poder modelar este sistema mecánico se puede descomponer en dos partes
principales, el modelo del motor y el modelo de la esfera al desplazarse (sin deslizarse)
sobre el riel. El motor consta también de un potenciómetro conectado en el eje del
engrane derecho, el cual sensa la posición angular del motor.
Cuando el motor gira el potenciómetro en contra de las manecillas del reloj de 0 a 90
grados ( ) la terminal del potenciómetro (sensor) registra -2.5volts (ver Figura
1.8.54) por lo que la constante utilizada en la retroalimentación interna en el diagrama
de la Figura 1.8.55 es

80
Figura 1.8.54 Posición angular del motor medida con el potenciómetro
La barra mide 40.5 cm de longitud, del centro de la barra a la derecha el sensor de
posición marca de 0 a -5 volts y del centro al extremo izquierdo el sensor marca de 0 a
+5 volts. Por lo que la relación voltaje-posición es .
Usando la función de transferencia del sistema barra-bola en (1.7.35) se elaboro el
diagrama de bloques mostrado en la Figura 1.8.55.
Figura 1.8.55 Diagrama de bloques del sistema Barra-Bola en lazo cerrado.
Se tiene que la función en lazo abierto del sistema de la figura 1.8.55 es

81
Utilizando esta función se elabora diagrama de de la Figura 1.8.56 la cual muestra
claramente que el sistema es inestable, ya que para K>0 existirá raíces en el lado
derecho del plano s.
Figura 1.8.56 Lugar de las raíces del sistema Barra-Bola en lazo cerrado
Figura 1.8.57 Diagrama esquemático para el control en forma analógica

82
El manual del panel SRV2 propone controlar el sistema con un control analógico (ver
Figura 1.8.57), con los siguientes valores para cada amplificador:
Compensador Network 1 Compensador Network 2
R1= 100K R1= 50K
R2= 100K R2= 50K
R3= 50K R3= 0K
R4= 50K R4= 100K
C1= 10 C1= 0
Tabla 1.8.11 Valor de los parámetros para el control analógico
A continuación se presenta el control del sistema barra-bola mostrado en la Figura
1.8.57 usando la tarjeta de adquisición de datos PCL-711B, donde los amplificadores
operaciones (Figura 1.8.58) son mostrados como bloques en Simulink.
Figura 1.8.58 Amplificador diferencial
Figura 1.8.59 Amplificador diferencial simplificado
83
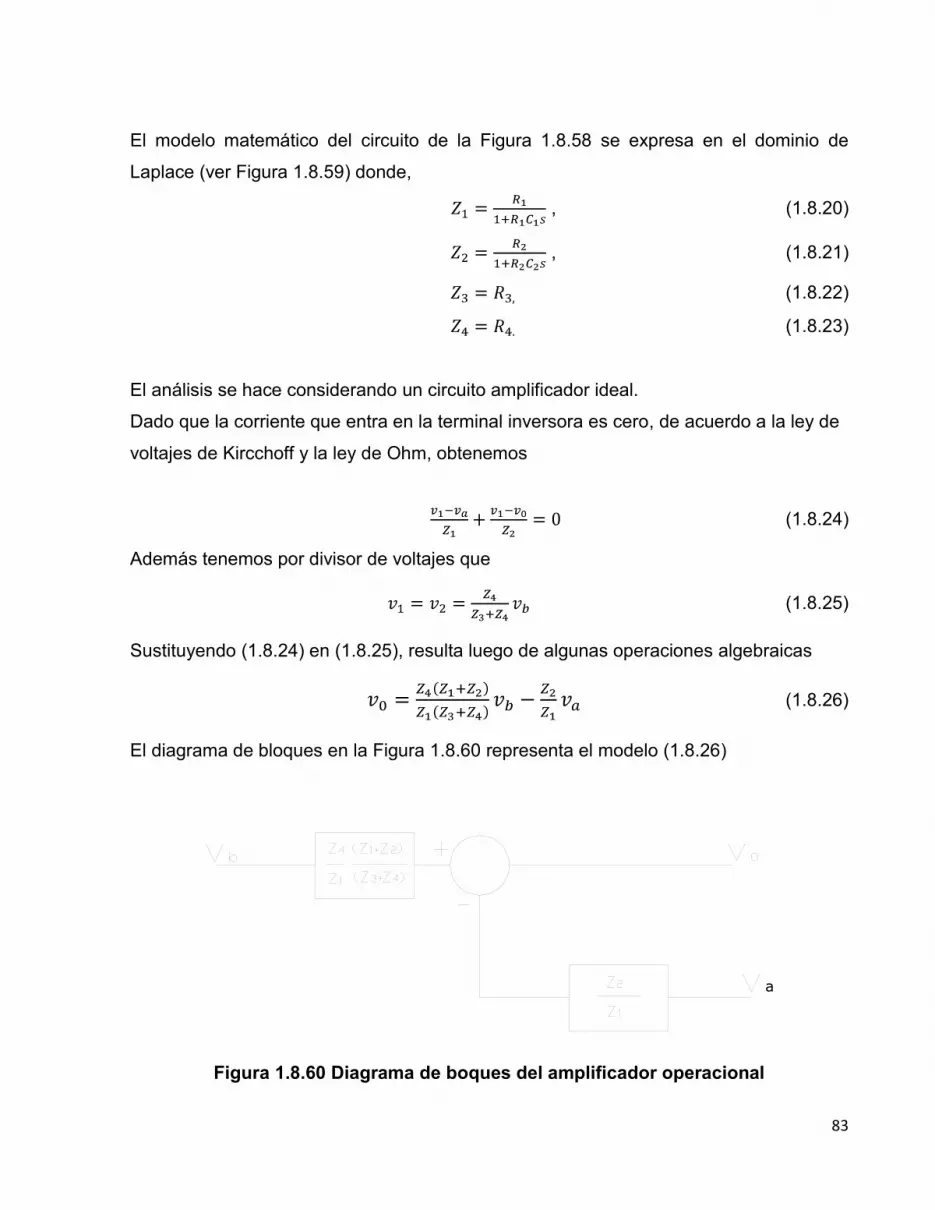
El modelo matemático del circuito de la Figura 1.8.58 se expresa en el dominio de
Laplace (ver Figura 1.8.59) donde,
, (1.8.20)
, (1.8.21)
(1.8.22)
(1.8.23)
El análisis se hace considerando un circuito amplificador ideal.
Dado que la corriente que entra en la terminal inversora es cero, de acuerdo a la ley de
voltajes de Kircchoff y la ley de Ohm, obtenemos
(1.8.24)
Además tenemos por divisor de voltajes que
(1.8.25)
Sustituyendo (1.8.24) en (1.8.25), resulta luego de algunas operaciones algebraicas
(1.8.26)
El diagrama de bloques en la Figura 1.8.60 representa el modelo (1.8.26)
Figura 1.8.60 Diagrama de boques del amplificador operacional
a
84
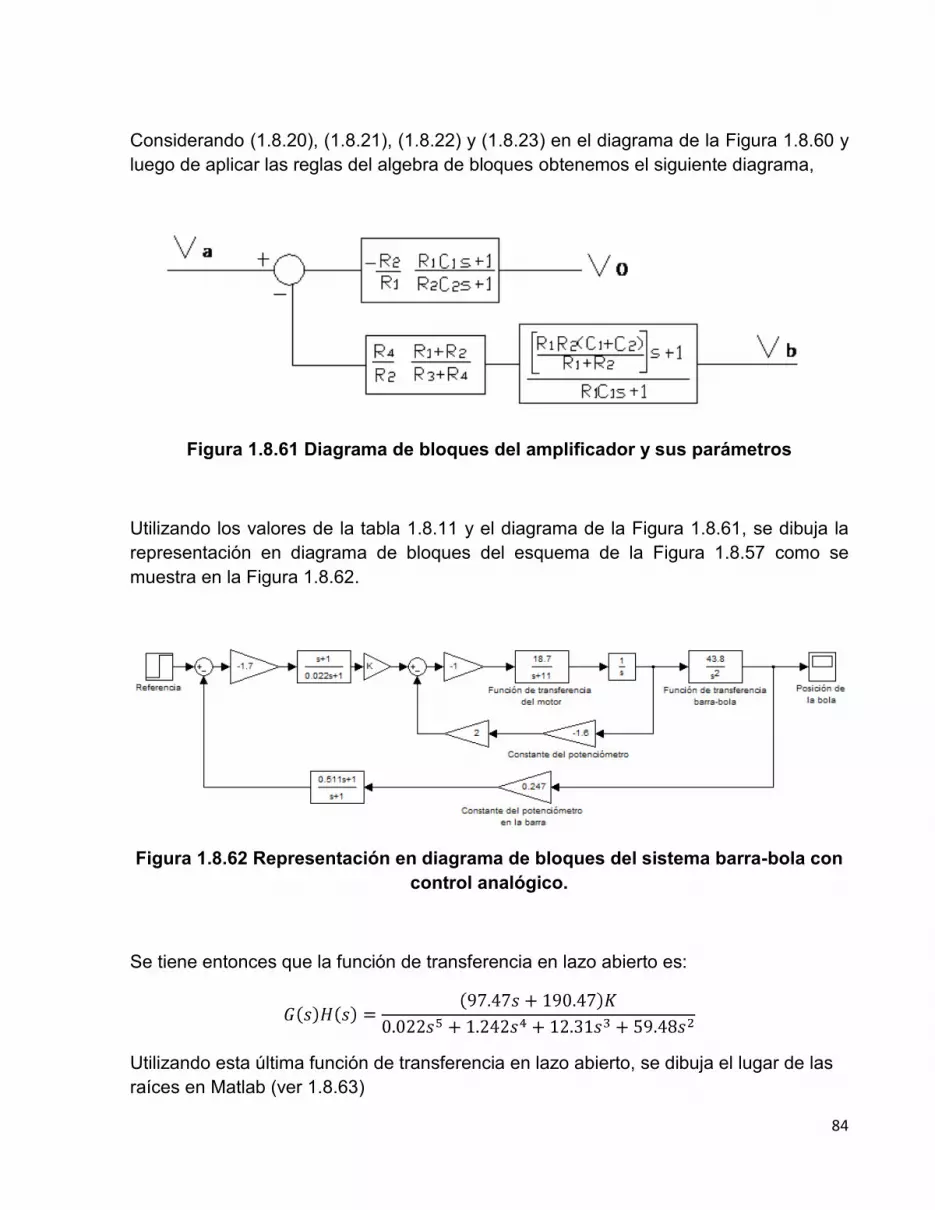
Considerando (1.8.20), (1.8.21), (1.8.22) y (1.8.23) en el diagrama de la Figura 1.8.60 y
luego de aplicar las reglas del algebra de bloques obtenemos el siguiente diagrama,
Figura 1.8.61 Diagrama de bloques del amplificador y sus parámetros
Utilizando los valores de la tabla 1.8.11 y el diagrama de la Figura 1.8.61, se dibuja la
representación en diagrama de bloques del esquema de la Figura 1.8.57 como se
muestra en la Figura 1.8.62.
Figura 1.8.62 Representación en diagrama de bloques del sistema barra-bola con
control analógico.
Se tiene entonces que la función de transferencia en lazo abierto es:
Utilizando esta última función de transferencia en lazo abierto, se dibuja el lugar de las
raíces en Matlab (ver 1.8.63)

85
Figura 1.8.63 Lugar de las raíces del sistema compensado
De acuerdo a la Figura 1.8.63 el sistema es estable entre los valores de ganancia
0<K<3.53.
Se crea un modelo en simulink con la librería Real Time Windows Target para el control
del sistema (ver figura 1.8.62)
Nota: la salida se configura como en la figura 1.8.39
Figura 1.8.64 Modelo para el control de sistema Barra-Bola

86
De la Figura 1.8.64 en la parte superior se muestra las entradas y la salida de la tarjeta
así como el control para el sistema real. En la parte inferior se muestra la simulación,
con el fin de comparar las respuestas.
Nota: es importante crear un convertidor de nivel como el que muestra la Figura 1.8.64.
Este nos ayuda para poder alimentar al motor con voltaje negativo ya que la tarjeta solo
suministra un voltaje en el rango de 0 a +10V.
Resultados
Figura 1.8.65 Respuesta del sistema Barra-Bola a una entrada escalón
Note la diferencia entre el experimento y la simulación en la Figura 1.8.65. Esto se debe
a que algunos efectos no lineales tales como la fricción no están considerados en
nuestro modelo lineal. Note también que nuestro control no es capaz de llevar al
sistema a la posición deseada.
87
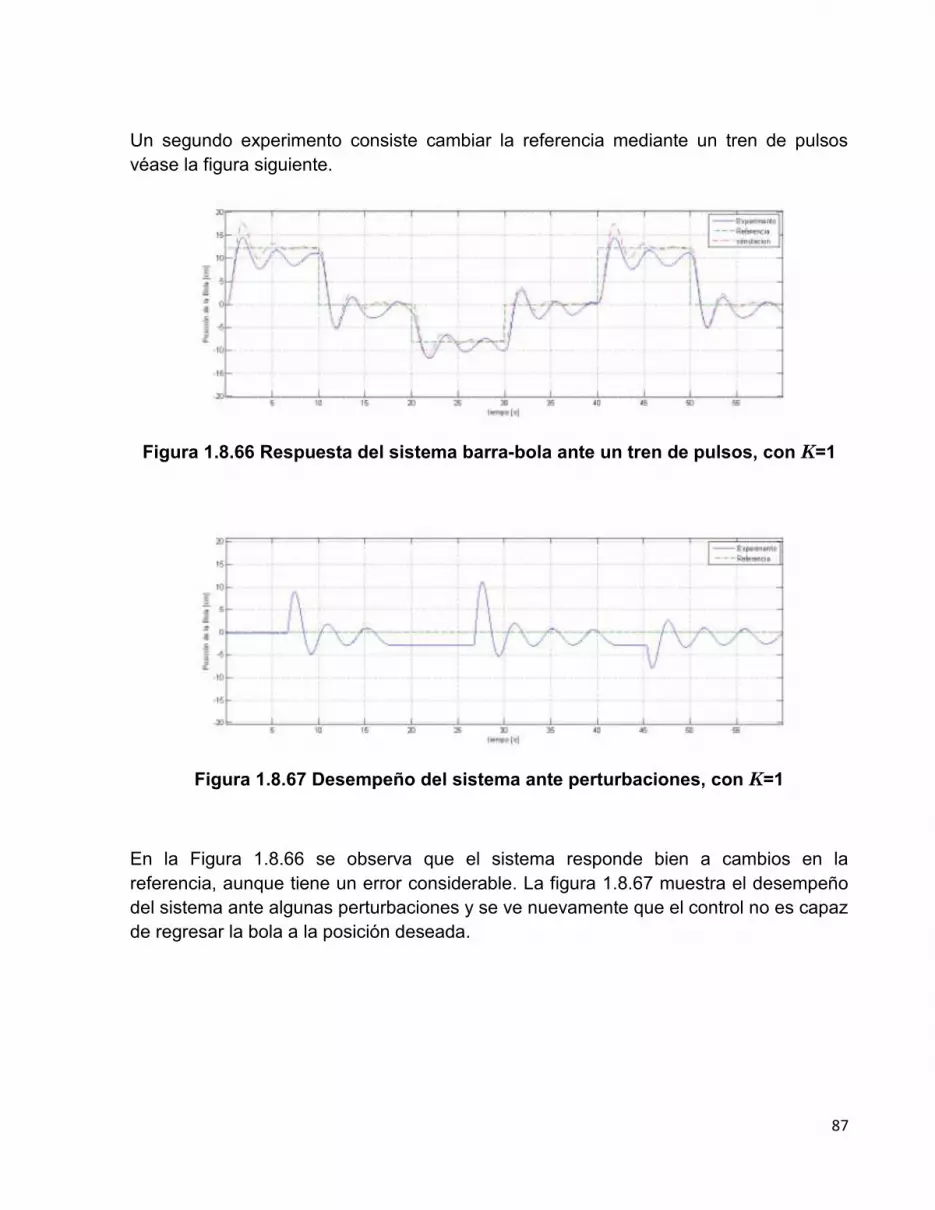
Un segundo experimento consiste cambiar la referencia mediante un tren de pulsos
véase la figura siguiente.
Figura 1.8.66 Respuesta del sistema barra-bola ante un tren de pulsos, con K=1
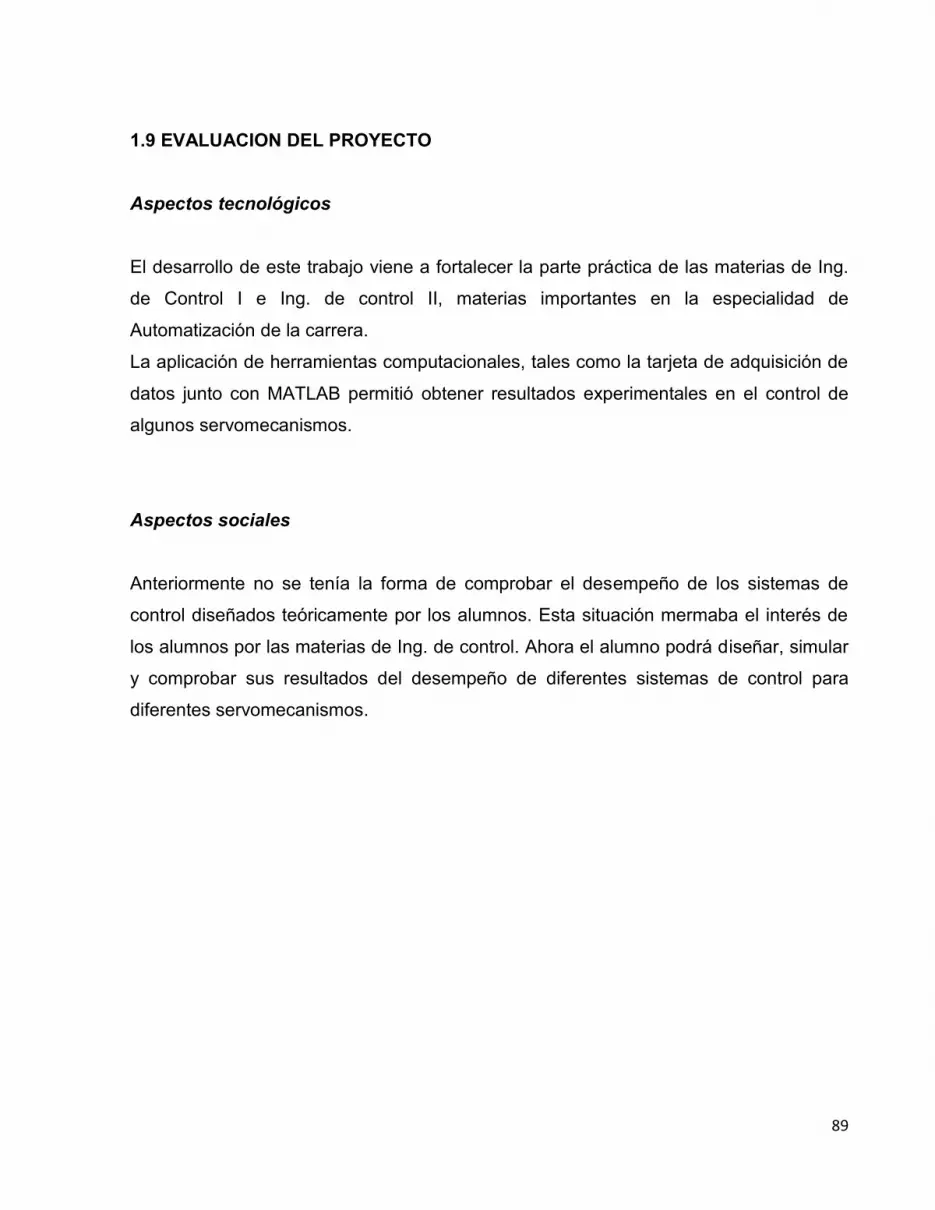
Figura 1.8.67 Desempeño del sistema ante perturbaciones, con K=1
En la Figura 1.8.66 se observa que el sistema responde bien a cambios en la
referencia, aunque tiene un error considerable. La figura 1.8.67 muestra el desempeño
del sistema ante algunas perturbaciones y se ve nuevamente que el control no es capaz
de regresar la bola a la posición deseada.

88
Un tercer experimento consistió en aumentar la ganancia K=2 del sistema, para lograr
un mejor desempeño del sistema de control.
Figura 1.8.68 Respuesta del sistema Barra-Bola a un tren de pulsos, con K=2
Figura 1.8.69 Desempeño del sistema ante perturbaciones, con K=2
Note que para una ganancia K=2 el error fue mucho menor (ver Figura 1.8.68).
Nótese también que el sistema ante perturbaciones el sistema de control logra regresar
la bola a la posición deseada (ver Figura 1.8.69).
89
1.9 EVALUACION DEL PROYECTO
Aspectos tecnológicos
El desarrollo de este trabajo viene a fortalecer la parte práctica de las materias de Ing.
de Control I e Ing. de control II, materias importantes en la especialidad de
Automatización de la carrera.
La aplicación de herramientas computacionales, tales como la tarjeta de adquisición de
datos junto con MATLAB permitió obtener resultados experimentales en el control de
algunos servomecanismos.
Aspectos sociales
Anteriormente no se tenía la forma de comprobar el desempeño de los sistemas de
control diseñados teóricamente por los alumnos. Esta situación mermaba el interés de
los alumnos por las materias de Ing. de control. Ahora el alumno podrá diseñar, simular
y comprobar sus resultados del desempeño de diferentes sistemas de control para
diferentes servomecanismos.
90
1.10 RESULTADOS OBTENIDOS
En este proyecto de residencia profesional se cumplió con todos los objetivos
planteados al iniciar el proyecto, los resultados fueron los siguientes:
La adquisición y generación de señales, así como el control de
servomecanismos, se logro satisfactoriamente utilizando la tarjeta PCL-711B
junto con MATLAB/SIMULINK.
El control de velocidad del motor-tacogenerador implementando un control PI.
Se logro la estabilización y control del sistema Barra-Bola con la tarjeta PCL-
711B y MATLAB-SIMULINK con la representación en diagrama de bloques de un
control analógico, propuesto por el manual del sisma SRV2.
Se comprobaron los parámetros del sistema barra-bola proporcionados por el
manual de sistema SRV2.
Se obtuvieron los parámetros del motor-tacogenerador, los cuales fueron
comparados con aquellos proporcionados en el manual de sistema SRV2.

91
1.11 CONCLUSIONES Y RECOMENDACIONES
La adquisición de datos con MATLAB, permite conectarnos en tiempo real con procesos
analógicos en forma simple. Sólo se requiere que la tarjeta de adquisición de datos sea
reconocida por MATLAB. La cual abarca la mayoría de fabricantes conocidos.
Con la ayuda de la tarjeta de adquisición de datos PCL-711B se comprobó que la
respuesta del motor-tacogenerador como del sistema barra-bola, proporcionados por el
manual de prácticas del sistema SRV2 [6], no coincidía con la repuesta real de cada
planta. Posteriormente se obtuvieron nuevos valores de los parámetros del modelo
lineal del motor-tacogenerador. También se corrigió el diagrama de bloques del sistema
barra-bola proporcionado por el manual.
Se logró controlar tanto el motor-tacogenerador como sistema barra-bola, comparando
la respuesta de cada sistema real con la respuesta de su respectivo modelo
matemático.
Se debe tener extremo cuidado en la lectura de las señales, ya que estas deben estar
anteriormente acondicionadas, de tal forma que no ocasionen daños a nuestro
hardware. Para la tarjeta PCL-711B, esta especificado una corriente máxima de 5mA
para la salida y un voltaje máximo de 20V para las entradas.
El menor tiempo de muestreo con la librería Real Time Windows Target para las
aplicaciones de generación y adquisición de señales analógicas es de 1ms, esto es
independiente de las características de la tarjeta, ya que por ejemplo, el menor tiempo
de muestreo de la tarjeta PCL-711B es 0.25µs.
La tarjeta está limitada a trabajar de 0 a 10V en la salida, por lo que si se quiere
alimentar un sistema con voltaje negativo se tiene que incorporar un convertidor de
nivel.
En la adquisición y generación de señales, siempre que se haga algún cambio en el
modelo en SIMULINK, como por ejemplo, agregar un nuevo bloque y al mover las
líneas de conexión entre bloques, se tiene que hacer nuevamente el paso 29 de la
capitulo 1.8.3.

92
1.12 BIBLIOGRAFIA
[1] K. Ogata. “Ingeniería de control moderna”, 4ªedición. Prentice Hall ,2003
[2] R. C. Dorf, R. H. Bishop “Sistemas de control moderno”, 10ªedición Prentice Hall, 2005
[3] Cesar Pérez López. “Matlab y sus aplicaciones en las ciencias y la ingeniería. Prentice Hall,
2002
[4] K. Ogata. “Dinámica de sistemas”, 1ªedición. Prentice Hall ,1987
.
[5] Beer, Johnston. “Mecánica vectorial para ingenieros Dinámica”. 7a edición. Mc Graw Hill,
2005
[6] Manual de laboratorio. Servo Control Training System, Analog and Digital. TM92215-00 de
Lab-Volt
[7] Documento Real-Time Windows Target™ 3 User’s Guide. Disponible en:
http://www.mathworks.fr/access/helpdesk/help/pdf_doc/rtwin/rn.pdf
[8] Sidney A. Davis. Retroalimentación y sistemas de control. Fondo educativo
Interamericano, S.A. 1977.
93
2 ANEXOS

94
Anexo A: Esquema de la conexión externa en el sistema SRV2 para el control del
sistema barra-bola.
Anexo B: Esquema de la conexión externa en el sistema SRV2 para el control de
velocidad de motor-tacogenerador.

95
Anexo C: Algunas Funciones Útiles de la Toolbox de Sistemas de Control Muestreo de sistemas c2d Conversión continúa a discreta d2c Conversión discreta a continua Modelos dinámicos tf Crear/convertir a modelo en función de transferencia pole, eig Polos del sistema pzmap Mapa de polos y ceros Modelos en variables de estado ss2ss Transformación de coordenadas de estado canon Formas canónicas de variables de estado ctrb, obsv matrices de controlabilidad y observabilidad Respuesta en el tiempo step Respuesta a escalón impulse Respuesta a impulso initial Respuesta de sistema en variables de estado con condiciones iniciales lsim Respuesta a entradas arbitrarias stepfun Generar entrada escalón unitario Respuesta en frecuencia bode Bode de respuesta en frecuencia nyquist Nyquist de respuesta en frecuencia Interconexión de sistemas + y - Sumar y restar sistemas (conexión paralela) * Multiplicar sistemas (conexión serie) / y \ Dividir sistemas (derecha e izquierda, respectivamente) inv Inversa de un sistema [ ] Concatenación horizontal/vertical de sistemas feedback Conexión realimentada de dos sistemas Herramientas de diseño clásico rlocus Lugar geométrico de raíces rlocfind Determinar interactivamente ganancia del LGR rltool Diseño GUI de LGR place Posicionar polos (realimentación de estado o estimador)

96
3 DOCUMENTOS ADMINISTRATIVOS
97

98

99

100

101