quadcopter'in dinamik analizi ve tasarımı
TRANSCRIPT

QUADCOPTER’İN DİNAMİK ANALİZİ
VE TASARIMI
BURAK KILIÇ
Bülent Ecevit Üniversitesi
Mühendislik Fakültesi
Makina Mühendisliği Bölümü
Mekanik Anabilim Dalında
Diploma Çalışması Olarak Hazırlanmıştır
ZONGULDAK
HAZİRAN 2014
i
KABUL
Burak Kılıç tarafından hazırlanan QUADCOPTER’İN DİNAMİK ANALİZİ VE
TASARIMI başlıklı bu çalışma jürimiz tarafından değerlendirilerek Mekanik Anabilim
Dalında Makine Mühendisliği Bitirme Projesi olarak kabul edilmiştir.
20.06.2014
Başkan : Dr. Mehmet YETMEZ
Üye : Dr. Fatmagül Koltuk
Üye : Dr. Hamdi Alper Özyiğit
ONAY
Yukarıdaki imzaların, adı geçen öğretim üyelerine ait olduğunu onaylarım.
20.06.2014
Dr. Mehmet DİLMAÇ
Makine Mühendisliği Bölüm Başkanı

ii
ÖZET
Makine Mühendisliği Diploma Çalışması
BURAK KILIÇ
Bülent Ecevit Üniversitesi
Mühendislik Fakültesi
Makine Mühendisliği Bölümü
Danışman: Dr. Mehmet YETMEZ
HAZİRAN 2014, 55 sayfa.
Bu çalışmada dört motorlu bir multicopter olan quadcopter’lerin kapalı ortamlardaki kalkış ve
seyir sırasındaki davranışları incelenmiştir. Kütle, quadcopter’in yerle yaptığı açı ve motorların
uyguladığı itme kuvveti gibi değerler değiştirilerek bu değerlerin quadcopter’in ivmesine,
dolayısıyla hızına yaptığı etkiler hesaplanmıştır. Bulgular MSC ADAMS programında yapılan
analizlerle doğrulanmıştır. Durgun havanın direnç kuvveti 3. Bölümde yapılan çıkarımların
MATLAB programında çözümlenmesiyle ayrıca hesaplanmıştır. MSC ADAMS üzerindeki
analizlere bu sonuçlar dâhil edilmemiştir. Direnç kuvveti dışındaki aerodinamik kuvvetler ve
rüzgâr gibi dış etkiler ise ihmal edilmiştir.
Anahtar Sözcükler:quadcopter, multicopter
iii
Annem, babam ve ananem için.
Varlıkları için:
Tayfun’a, Gökhan’a, denklemlerimi düzelten Ekin’e
ve Fatih’e...
Yardımları için:
Anıl’a, Ceyhun’a ve Sefa’ya,
İlham verdikleri için:
Dr. Mehmet Yetmez ve Dr. Handan Baycık’a,
Teşekkürlerimi sunarım.
iv
İÇİNDEKİLER
Sayfa No
i. KABUL i
ii. ÖZET ii
iii. TEŞEKKÜR iii
iv. İÇİNDEKİLER iv-v
v. ŞEKİLLER LİSTESİ vi-viii
vi. SEMBOLLER ix
1. MULTICOPTERLER 1
1.1 TANIM 1
1.2 İÇERİK VE KONFİGÜRASYON 6
2. QUADCOPTERLER 11
2.1 QUADCOPTER TANIMI 11
2.2 QUADCOPTER’LERİN TARİHİ 12
2.2.1 İlk Denemeler 12
2.2.1.1 Oehmichen No.2 (1920) 12
2.2.1.2 Bothezathelicopter (1922) 13
2.2.1.3 Convertawings Model A Quadrotor (1956) 13
2.2.1.4 Curtiss-Wright VZ-7 (1958) 13
2.2.1.5 Güncel Değişiklikler 13
2.2.2 Günümüz Programlarından Bazıları 14
2.3 KULLANIM ALANLARI 15
2.3.1 Araştırma Platformu 15
2.3.2 Asker ve Güvenlik Güçleri 16
2.3.3 Ticari 16
2.3.4 Uçuş Kontrolü 16
2.4 QUADCOPTER PARÇALARI 19
2.4.1 Temel Parçalar 19
2.4.1.1 Şase 19
2.4.1.2 Kontrol Kartı (Uçuş Kontrolcüsü) 20
2.4.1.3 Motor ve Pervane 21
2.4.1.4 Motor Sürücü (ESC) 22
v
2.4.2 Yardımcı Parçalar 22
2.4.2.1 Kumanda ve Alıcı 22
2.4.2.2 Batarya ve Şarj Aleti 22
2.4.2.3 Telemetri Alıcı ve Verici 23
2.4.2.4 Kablosuz Görüntü Aktarımı 23
2.4.2.5 Gimbal 23
2.4.2.6 Diğer Aksesuarlar 23
3. QUADCOPTER DİNAMİĞİ 24
3.1 KUVVET DENKLEMLERİ 24
3.1.1 Quadcopter’in Ağırlığı 24
3.1.2 İtme Kuvvetleri 24
3.1.3 Direnç Kuvveti 24
3.2 QUADCOPTER’İN KALKIŞ ANINDAKİ KUVVET ANALİZİ 25
3.3 QUADCOPTER’İN SEYİR HALİNDEKİ KUVVET ANALİZİ 26
4. DİNAMİK ANALİZ 30
4.1 QUADCOPTER’İN TIRNAMIŞ ANINDAKİ DİNAMİK ANALİZİ 30
4.2 QUACOPTER’İN SEYİR HALİNDEKİ DİNAMİK ANALİZİ 34
5. DİRENÇ KUVVETİNİN QUADCOPTER’İN KİNEMATİĞİNE ETKİSİ 39
5.1 KALKIŞ SIRASINDAKİ KİNEMATİĞE ETKİSİ 39
5.1.1 𝑆𝑤’nin Kalkış Sırasındaki Kinematiğe Olan Etkisi 39
5.1.1.1 𝑆𝑤’nin Hıza Olan Etkisi 39
5.1.1.2 𝑆𝑤’nin İvmeye Olan Etkisi 40
5.1.1.3 𝑆𝑤’nin Yer Değiştirmeye Olan Etkisi 41
5.1.2 Kuvvetin Kalkış Sırasındaki Kinematiğe Olan Etkisi 42
5.1.2.1 Hıza Olan Etkisi 42
5.1.2.2 İvmeye Olan Etkisi 43
5.1.2.3 Yer Değiştirmeye Olan Etkisi 44
5.2 SEYİR SIRASINDAKİ DİREN KİNEMATİĞE ETKİSİ 45
5.2.1 Değişik Seyir Açılarının Seyir Sırasındaki Kinematiğe Etkisi 45
5.2.1.1 Hıza Olan Etkisi 45
5.2.1.2 İvmeye Olan Etkisi 47
5.2.1.3 Yer Değiştirmeye Olan Etkisi 49
6. SONUÇLAR 51
KAYNAKÇA 52
EK-1 53
EK-2 54
vi
ŞEKİLLER LİSTESİ
Sayfa No
Şekil 1.1 İnsan ulaşımı için geliştirilmekte olan bir multicopter 1
Şekil 1.2 George Cayley’in 1796 da yaptığı helikopter tasarımının Indiana’da ki Ulusal Model
Havacılık Müzesinde duran replikası 2
Şekil 1.3 V-22 Osprey 3
Şekil 1.4 Thomas Edison’un patent için başvurduğu birçok multi-rotor araçtan bir tanesi
3
Şekil 1.5 Jules Verne’ünClipper of theClouds kitabından Albatros’un çizimi 4
Şekil 1.6 Paul Cornu ve 1907 model çift motorlu hava aracı 5
Şekil 1.7 Bell-X22A, Dikey kalkış yapabilen, ileri gitmek için jet motoru kullanan bir quadrotor
7
Şekil 1.8 “Uçan Ahtapot” George De Bothezat tarafından tasarlanan bir quadrotor, Şubat 1923
7
Şekil 1.9 1958-1960 arasında Amerikan Ordusu tarafından kullanılan TheCurtiss-Wright VZ-7
“Uçan Jeep 8
Şekil 1.10 Curtis-Wright X-19, dört motorlu Tilt-Aircraft, 1963 8
Şekil 2.1 Helikopterlerde kullanılan “cyclic” kontrol pozisyonları 11
Şekil 2.2 de Bothezat, 1923 13
Şekil 2.3 Parrot AR. Drone’un uçan prototipi 14
Şekil 2.4 Parrot AR. Drone 2.0 kalkerken, Nevada 2012 15
Şekil 2.5 Quadcopter özdeş motorlarının dönüş yönleri 17
Şekil 2.6 Quadcopter’in havada asılı durma pozisyonundaki (hover pozisyonu) özdeş
motorların devir hızları 18
Şekil 2.7 Quadcopter’in yalpa (yaw) hareketi yapması için özdeş motorların çalışması gereken
devir hızları 18
vii
Şekil 2.8 Quadcopter’in dönme (roll) hareketi yapması için özdeş motorların çalışması gereken
devir hızları 19
Şekil 2.9 Açık kaynak kodlu bir proje olan ArduCopter’in şasesi 20
Şekil 2.10 Üst düzey bir kontrol kartı 20
Şekil 2.11 1200 KV ya da 286 W güç üreten bir motor 21
Şekil 2.12 Pervane tipleri 21
Şekil 2.13 40 Amper’e kadar çalışan bir ESC 22
Şekil 3.1 Kalkış sırasındaki quadcopter’in serbest cisim diyagramı 25
Şekil 3.2 Sabit α açısıyla seyir sırasındaki quadcopter’in serbest cisim diyagramı 27
Şekil 4.1 Quadcopter’in MSC ADAMS üzerindeki izometrik görüntüsü 30
Şekil 4.2 Quadcopter’in MSC ADAMS üzerindeki üstten görünüşü 30
Şekil 4.3 Quadcopter’in MSC ADAMS üzerindeki önden görünüşü 31
Şekil 4.4 Quadcopter’in𝑚 = 2.5 𝑘𝑔 ve𝐹𝑀 = 8𝑁 için tırmanış sırasındaki hız ve ivmesi
31
Şekil 4.5 Quadcopter’in𝑚 = 2.5 𝑘𝑔 ve𝐹𝑀 = 12𝑁 için tırmanış sırasındaki hız ve ivmesi
32
Şekil 4.6 Quadcopter’in𝑚 = 2.5 𝑘𝑔 ve𝐹𝑀 = 20𝑁 için tırmanış sırasındaki hız ve ivmesi
32
Şekil 4.7 Quadcopter’in𝑚 = 1 𝑘𝑔 ve𝐹𝑀 = 8𝑁 için tırmanış sırasındaki hız ve ivmesi
33
Şekil 4.8 Quadcopter’in𝑚 = 1 𝑘𝑔 ve𝐹𝑀 = 12𝑁 için tırmanış sırasındaki hız ve ivmesi
33
Şekil 4.9 Quadcopter’in𝛼 = 10° için MSC ADAMS’daki görünüşü 34
Şekil 4.10 Quadcopter’in𝛼 = 10° için MSC ADAMS’daki önden görünüşü 35
Şekil 4.11 Quadcopter’in𝑚 = 1 𝑘𝑔 , 𝛼 = 10° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve ivmesini
gösterir grafik 36
Şekil 4.12 Quadcopter’in𝑚 = 2.5 𝑘𝑔 , 𝛼 = 10° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve
ivmesini gösterir grafik 36
Şekil 4.13 Quadcopter’in𝛼 = 20° için MSC ADAMS’daki önden görünüşü 37
viii
Şekil 4.14 Quadcopter’in𝑚 = 1 𝑘𝑔 , 𝛼 = 20° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve ivmesini
gösterir grafik 37
Şekil 4.15 Quadcopter’in𝛼 = 30° için MSC ADAMS’daki önden görünüşü 38
Şekil 4.16 Quadcopter’in𝑚 = 1 𝑘𝑔 , 𝛼 = 30° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve ivmesini
gösterir grafik 38
Şekil 5.1 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 8 𝑁için hız-zaman grafiği 39
Şekil 5.2 𝑆𝑤 = 0.45 𝑚2 ve 𝐹 = 8 𝑁için hız-zaman grafiği 39
Şekil 5.3 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 8 𝑁için ivme-zaman grafiği 40
Şekil 5.4 𝑆𝑤 = 0.45 𝑚2 ve 𝐹 = 8 𝑁için ivme-zaman grafiği 40
Şekil 5.5 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 8 𝑁için yer değiştirme-zaman grafiği 41
Şekil 5.6 𝑆𝑤 = 0.45 𝑚2 ve 𝐹 = 8 𝑁için yer değiştirme-zaman grafiği 41
Şekil 5.7 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 12 𝑁için hız-zaman grafiği 42
Şekil 5.8 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 20 𝑁için hız-zaman grafiği 42
Şekil 5.9 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 12 𝑁için ivme-zaman grafiği 43
Şekil 5.10 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 20 𝑁için ivme-zaman grafiği 43
Şekil 5.11 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 12 𝑁için yer değiştirme-zaman grafiği 44
Şekil 5.12 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 20 𝑁için yer değiştirme-zaman grafiği 44
Şekil 5.13 𝛼 = 10° için yataydaki hız-zaman grafiği 45
Şekil 5.14 𝛼 = 10° için düşeydeki hız-zaman grafiği 45
Şekil 5.15 𝛼 = 30° için yataydaki hız-zaman grafiği 46
Şekil 5.16 𝛼 = 30 için düşeydeki hız-zaman grafiği 46
Şekil 5.17 𝛼 = 10° için yataydaki ivme-zaman grafiği 47
Şekil 5.18 𝛼 = 10° için düşeydeki ivme-zaman grafiği 47
Şekil 5.19 𝛼 = 30° için yataydaki ivme-zaman grafiği 48
Şekil 5.20 𝛼 = 30° için düşeydeki ivme-zaman grafiği 48
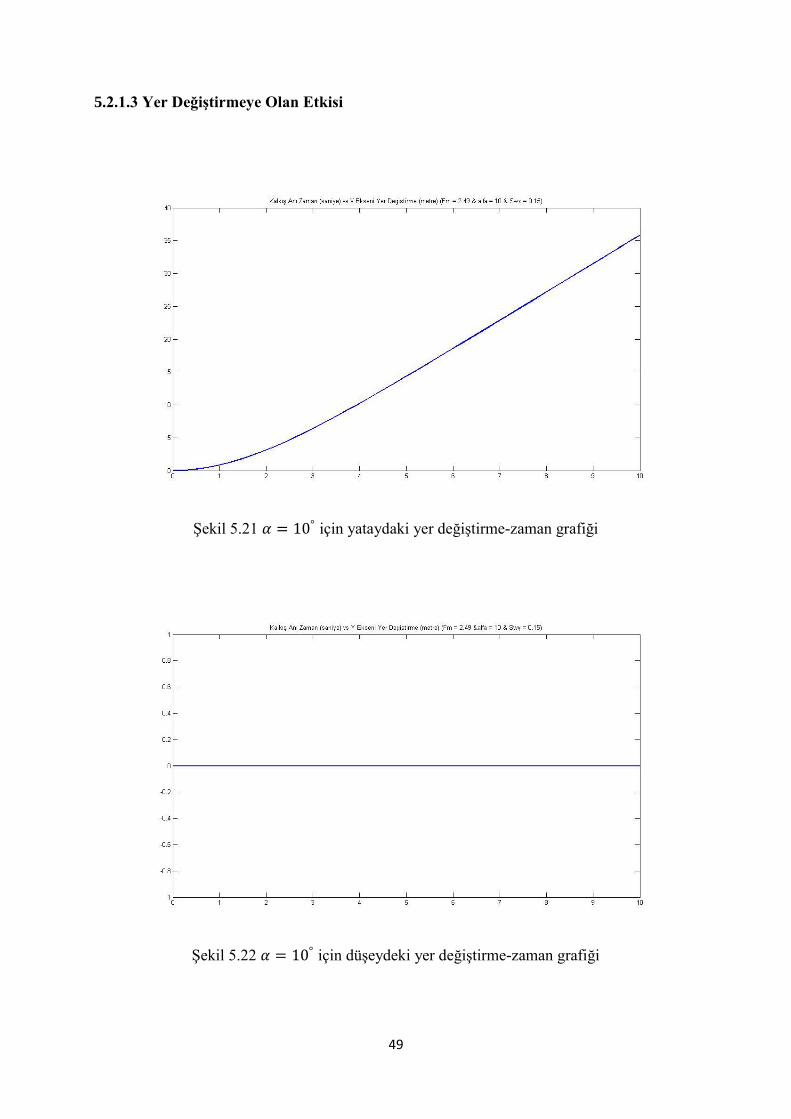
Şekil 5.21 𝛼 = 10° için yataydaki yer değiştirme-zaman grafiği 49
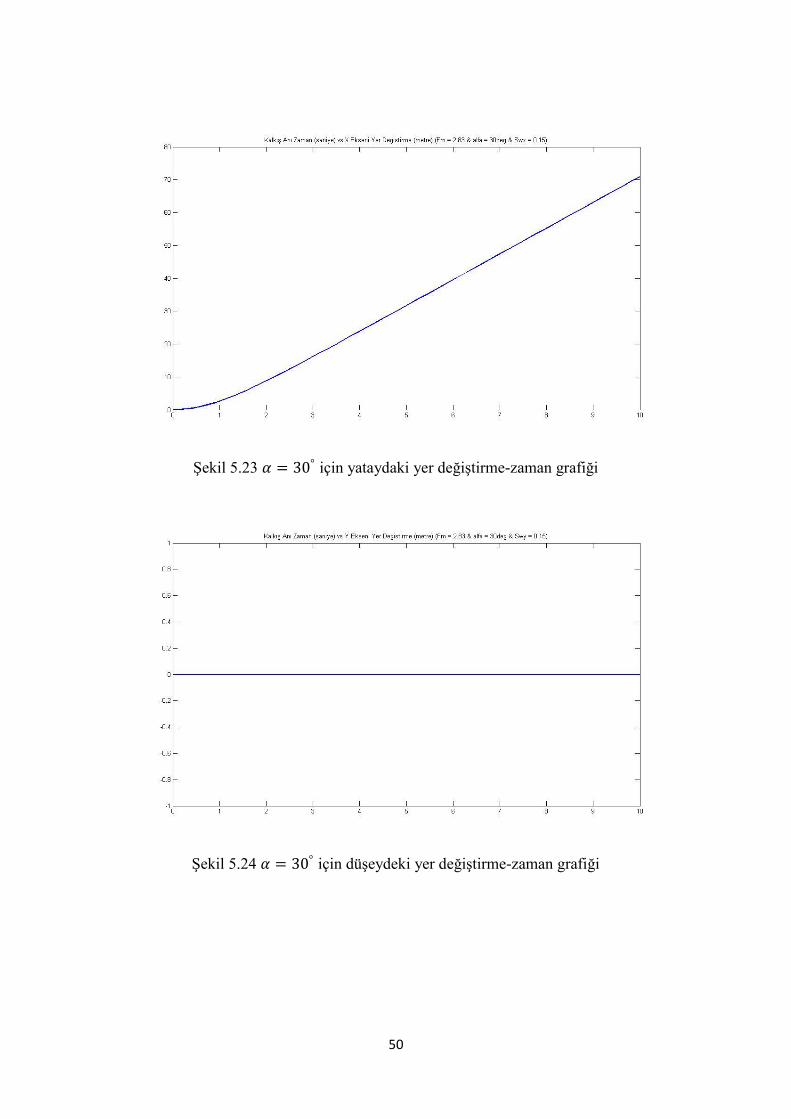
Şekil 5.22 𝛼 = 10° için düşeydeki yer değiştirme-zaman grafiği 49
Şekil 5.23 𝛼 = 30° için yataydaki yer değiştirme-zaman grafiği 50
Şekil 5.24 𝛼 = 30° için düşeydeki yer değiştirme-zaman grafiği 50
ix
SEMBOLLER
𝑥, 𝑦, 𝑧 Koordinat eksenleri
𝐹 Kuvvet
𝐹𝑀1, 𝐹𝑀2, 𝐹𝑀3, 𝐹𝑀4 1, 2, 3 ve 4 no’lu motorlarının itme kuvvetleri
𝐹𝑖𝑡𝑚𝑒 Toplam itme kuvveti
𝐹𝑖𝑡𝑚𝑒,𝑘𝑎𝑙𝑘𝚤ş Kalkış esnasındaki itme kuvveti
𝑚 Kütle
𝑔 Yer çekimi ivmesi
𝐹𝑔 Yer çekimi kuvveti
�̈� Quadcopter’in +𝑥 yönündeki ivmesi
�̈� Quadcopter’in +𝑦 yönündeki ivmesi
�̈� Quadcopter’in +𝑧 yönündeki ivmesi
�̈� Sabit
𝐹𝑑 Direnç kuvveti
𝜌 Havanın yoğunluğu
𝑉 Quadcopter’in hızı
𝐶𝐷 Hava direnç katsayısı
𝑆𝑤 Quadcopter’in seyir yönüne dik alanı
α Quadcopter’in yerle yaptığı açı
1
1. MULTICOPTERLER
1.1 TANIM
TDK’nın tanımına göre helikopter:
(Fransızca hélicoptère) Dik iniş ve çıkış yapabildiği için dar yerlerde de kullanılabilen, tepeden
pervaneli, uçan taşıt.
Bu tanıma göre multicopter ve helikopter aynı anlamı taşıyor. Peki, neden multicopter aslında
helikopter değil?
Şekil 1.1 İnsan ulaşımı için geliştirilmekte olan bir multicopter
Multicopter’ler kontrollü uçmak için mekanik plakalara, kuyruk motoru veya koaksiyel
motorlara ihtiyaç duymayan kendine özgü bir türdür.
2
Şekil 1.2 George Cayley’in 1796 da yaptığı helikopter tasarımının Indiana’da ki Ulusal Model
Havacılık Müzesinde duran replikası
Multicopter’lerIgorSikorsky tarafından 20. yüzyılda bulunan karakteristiklerin tümüne uymaz.
Eğer çok motorlu V-22 Osprey gibi araçların multicopter olduğunu düşünüyorsanız
yanılıyorsunuz. V-22 bir multirotor’dur ama multicopter değildir.
Şekil 1.3 V-22 Osprey
Osprey kendi karakteristik özellikleri bulunan bir tilt-rotor hava aracıdır. Tilt-rotorlar
multicopter tarihinin bir parçası olmasına rağmen, kendine özgü araçlardır.
3
Tilt-rotorlar bir uçak ve helikopter kırması olarak düşünülebilir. Motorları irtifa için, sabit
kanatları ve kontrol plakalarını ise ileri gidiş için kullanır. Multicopter için ise madem bir sözlük
tanımı yok, kendimiz tanımlayalım.
Multicopter: ikiden fazla motora sahip, pitch, roll, yaw ve lift sadece hız (rpm) kullanılarak
kontrol edilen, stabilizasyonu elektro-mekanik sensörlerden ve hesaplayıcı cihazlarla sağlanan
havadan ağır cihazlardır. Tricopter, quadcopter, hexacopter, octocopter, pluscopter, xcopter,
hcopter isimleri spesifik konfigürasyonlar için kullanılabilir.
Şekil 1.4 Thomas Edison’un patent için başvurduğu birçokmulti-rotor araçtan bir tanesi
4
Bir uçağa veya helikoptere göre modern bir multicopter içerik olarak çok daha basittir. Ancak
bu basitlik bununla sınırlıdır. Uçuş kontrolcüsünün içindeki karmaşık yazılımlar multicopter’in
uçmasını sağlar.
Şekil 1.5 Jules Verne’ünClipper of theClouds kitabından 37 motoruyla bugünün
multicopter’in atası olan Albatros’un çizimi
5
Birkaç motora birkaç çomak ve pervane bağlamakmulticopter’in uçması için yetmez. Bir sürü
kişi bunu denemiştir ancak maalesef bu yeterli değil. Sebebi ise bir uçuş kontrolcüsü olmadan
her motor tarafından sağlanan gücün kontrol edilememesi ve kontrolün sağlanamamasıdır.
Sabit bir multicopter’e uygulanan kuvvetlerin toplamı sıfırdır. Her motor ve pervane
kombinasyonu itme ve tork oluşturur. Bunlar birleştiğinde multicopter’inkalkış (lift), yalpa
(yaw) ve dönüş hareketi (roll) yapmasına olanak sağlar.
Multicopter’de lift, motorların itme kuvveti sayesinde sağlanır. Eğer yerçekimi, rüzgâr ve
sürükleme gibi kuvvetleri bertaraf edebilseydik ve her motordan eşit itme gücü alsaydık
aracımız direk olarak yukarı yükselirdi ve devam ederdi. Bu denkleme yerçekimini eklersek
motorların itme gücü yerçekiminin üstesinden gelmek zorunda. Eşit olurlarsa ise sabit kalır.
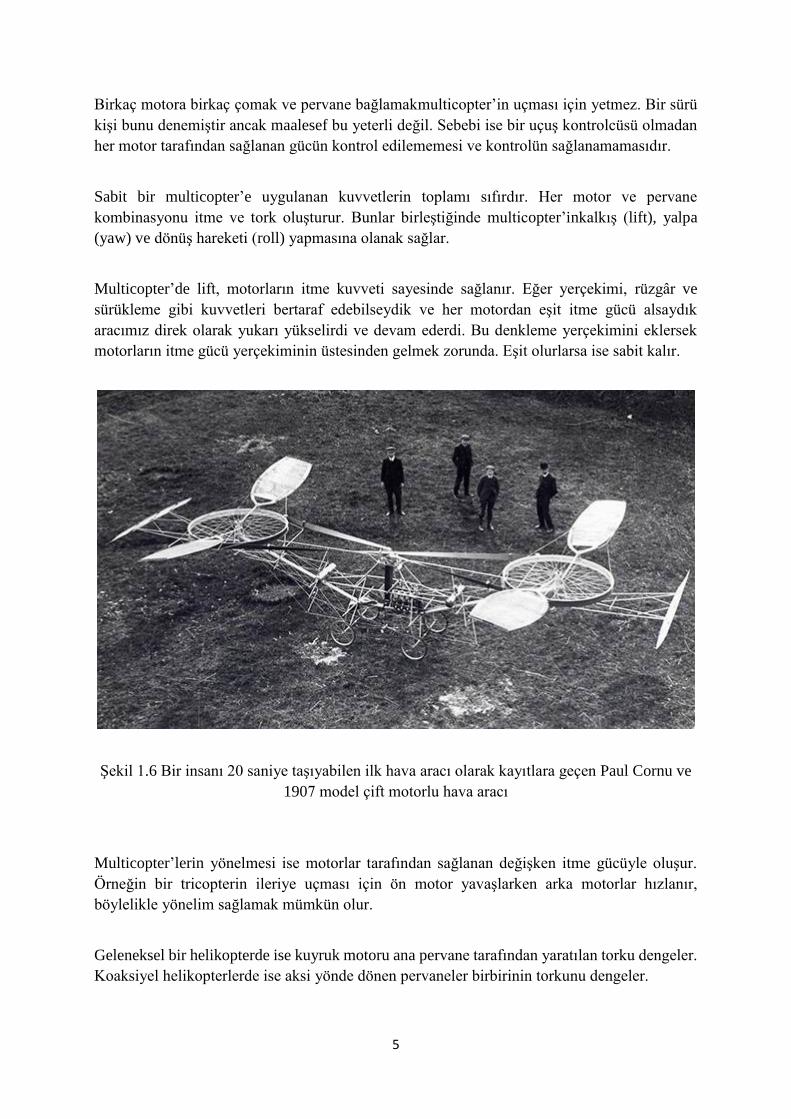
Şekil 1.6 Bir insanı 20 saniye taşıyabilen ilk hava aracı olarak kayıtlara geçen Paul Cornu ve
1907 model çift motorlu hava aracı
Multicopter’lerin yönelmesi ise motorlar tarafından sağlanan değişken itme gücüyle oluşur.
Örneğin bir tricopterin ileriye uçması için ön motor yavaşlarken arka motorlar hızlanır,
böylelikle yönelim sağlamak mümkün olur.
Geleneksel bir helikopterde ise kuyruk motoru ana pervane tarafından yaratılan torku dengeler.
Koaksiyel helikopterlerde ise aksi yönde dönen pervaneler birbirinin torkunu dengeler.
6
Bütün motorlar tarafından yaratılan döngüsel torkun toplamı multicopter’in rotasyonunu
belirler. Multicopter’i pilotun istediği yöne çevirmek için o yöne pozitif bir döngüsel tork
uygulanması gerekir. Bu da her motorun döngüsel torkunu ayarlayarak mümkün olur.
Torkun etkisinin görülebilmesi için motor devrinin değiştirilmesiyle mümkün olur. Eğer bir
multicopter havada asılı duruyorsa, etkiyen döngüsel tork sıfırdır. Sağa veya sola çevirmek için
her motorun yavaşlatılıp hızlandırması gerekir.
Belirli motorların yavaşlatılmasıda itmeyi düşürür. Devri azaltmak daima motorun uyguladığı
itme gücünü değiştirir. Hızlıca multicopter çevrilmeye çalışılırsa cihazın irtifa kaybettiği
görülebilir.
Uçarken dönmek için belirli motorlar yavaşlayan motorlardan kaynaklanan itme kaybını
kompanse etmek amacıyla daha hızlı dönmek zorundadır.
Peki multicopter nasıl havada bu kadar stabil kalabilir? Cevap uçuş kontrolcüsü. Uçuş
kontrolcüsü cihaza etkiyen bütün kuvvetleri değerlendirerek aynı zamanda pilottan komutları
alır. Bu değerlendirmeleri ve uygulamaları etkiyen gücün etkisinden daha hızlı yapmak
zorundadır. Aksi takdirdemulticopter irtifa kaybeder ve düşer.
1.2 İÇERİK VE KONFİGÜRASYON
Birçok şekil ve boyutta multicopter bulunur. Konfigürasyon farklılıklarına rağmen temel
içerikleri aynıdır. Bunlar kumanda, motor, pervane, ESCler, şase ve uçuş kontrolcüsü olarak
özetlenebilir.
Ne kadar ileri seviye uçtuğunuza bağlı olarak video kamera, GPS, kompas, barometre, sonar
sensörler ve telemetri gibi özellikler de eklenebilir. Uçuş kontrolcüsünegyro ve
akselerometrenin yanında genelde çoğu sensördâhildir.
Multicopter tanımımıza göre simetrik olarak yerleştirilmiş en az iki motor bulunur. Motor
sayısı ve uçuş konfigürasyonu multicopter’in çeşidini belirler.
7
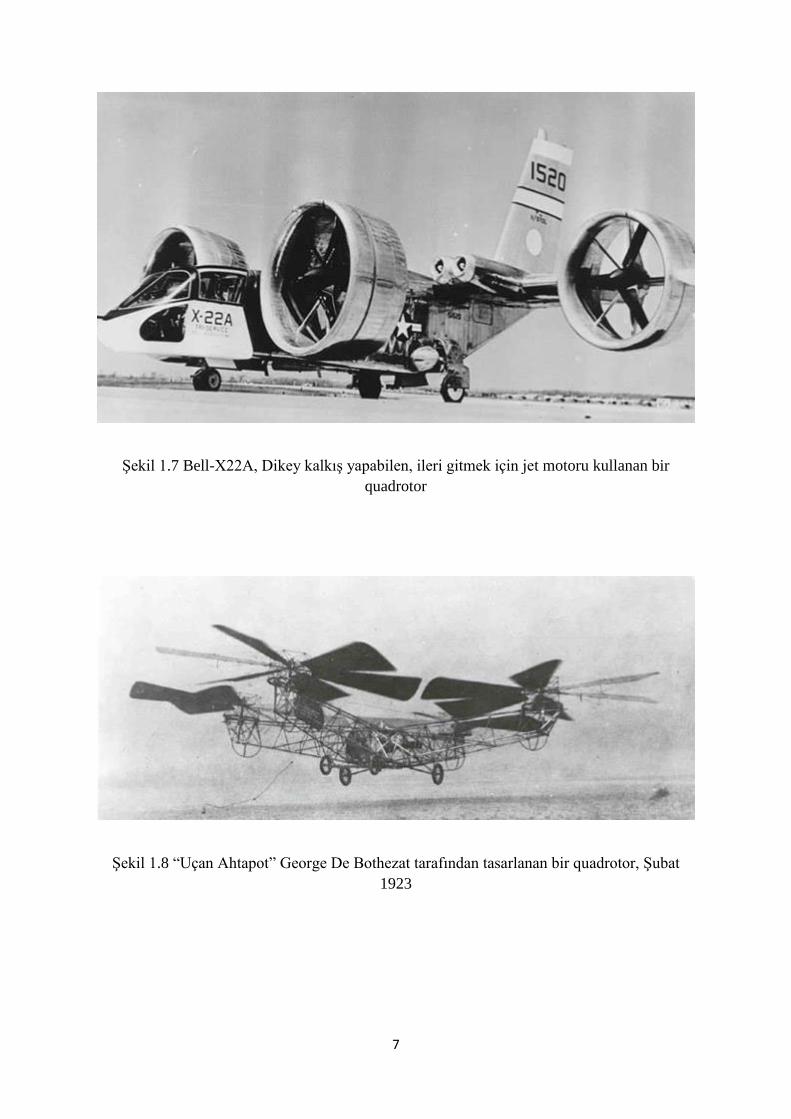
Şekil 1.7 Bell-X22A, Dikey kalkış yapabilen, ileri gitmek için jet motoru kullanan bir
quadrotor
Şekil 1.8 “Uçan Ahtapot” George De Bothezat tarafından tasarlanan bir quadrotor, Şubat
1923
8
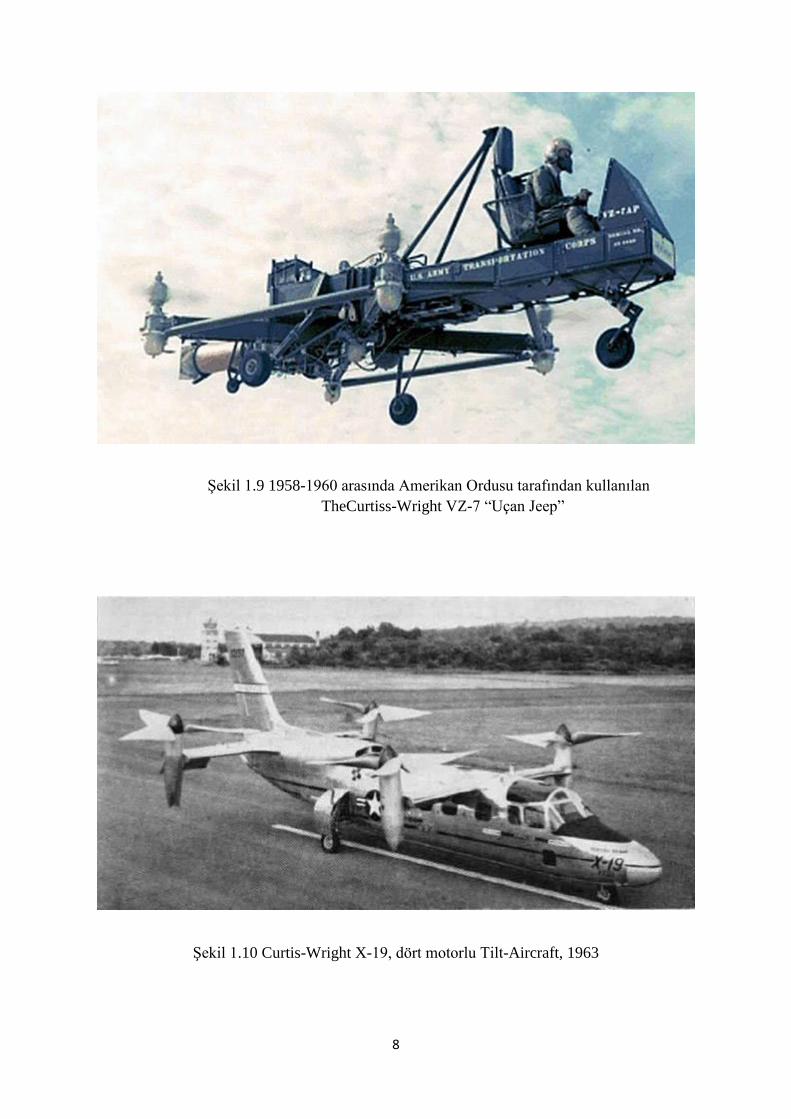
Şekil 1.9 1958-1960 arasında Amerikan Ordusu tarafından kullanılan
TheCurtiss-Wright VZ-7 “Uçan Jeep”
Şekil 1.10 Curtis-Wright X-19, dört motorlu Tilt-Aircraft, 1963
9
Örneğin dört motorlu bir multicopterquadcopter’dir ve “+” “X” veya “H” konfigürasyonunda
uçabilir. Motorlar eş eksenli, yukarı veya aşağı bakacak şekilde takılabilir. Altı pervaneli bir
hexacopter simetrik veya “Y” konfigürasyonunda olabilir.
Çoğu konfigürasyon multicopter’leri iki ve sekiz motor arasına limitlemesine rağmen
Distributed Flight Array (DFA) bu önermeyi bozabilir. İsviçre Federal Teknoloji Enstitüsü,
Hareketli Sistem ve Kontrol Enstitüsünde DFA ile çalışmalarını sürdürmektedir.
DFA birbiriyle koordine olabilen otonom tek pervaneli araçların birbiriyle birleşerek
oluşturduğu uçuş platformudur.
DFA iki, üç, dört veya kırktan fazla motora sahip olabilir. Her motor bağımsız hareket eder ve
ihtiyaç duyulduğunda birleşip tek bir ünite halinde uçabilir. Enstitü birkaç yıldır araştırmalarını
sürdürmekte olup hali hazırda birkaç versiyon üretmiştir.
Pilot multicopter’e yaklaşık 60 yıldır kullanılan kumanda sistemiyle komut verir. RC
teknolojisi son yıllarda tek kanaldan çok kanallıya, AM,FM ve PPM’den 2.4 GHz’e geçse de
mantık hala aynıdır.
Multicopter’ler pilot kontrolü için yeni seçeneklerde sunmaya başladı. Örneğin Parrot AR
Drone pilota akıllı telefon, tablet, dizüstü veya oyun konsolu kumandası gibi araçlarla kontrol
imkanı veriyor.
Bu cihazlarla büyüyen gençler alışık oldukları için daha rahat kontrol edebiliyorlar. Akıllı
telefonlar, tabletler ve dizüstü bilgisayarlar ise fotoğraf, video kaydetme, telemetri ve otopilot
gibi daha gelişmiş seçenekleri kullanmak için olanak sağlıyor. Buna rağmen RC kumanda hala
krallığını sürdürüyor.
Ağırlık tüm hava araçlarında ve multicopter’de olduğu gibi düşmandır. Bu yüzden şaseler hem
hafif hemde bükülmeyi önlemek için güçlü bir yapıda olmak zorundadır. Şase seçenekleri ise
multicopter yapımı için üretilmiş karbon fiber tasarımlardan ev gereçleri satan mağazalardan
alınacak parçalara kadar çeşitlilik gösterir.
Motor, ESC, pil ve pervane seçimleri tecrübe ve araştırma gerektirir. Çoğu uçak çeşitli
pervanelerle uyum sağlasa damulticopter’ler daha seçicidir. Çap ve kullandığı alan itmeyi
belirlemede önem taşır. Fazla büyük bir pervane daha çok enerji harcar.
Pervaneleri çevirmek için kullanılan güç uçuş süresi ve uçuş karakteristiklerine etki edecektir.
LiPo piller ve ESC’ler pervane ve motor seçimine uygun olmak zorundadır. Aksi takdirde
multicopter hasar görebilir veya havada kaybolabilir.

10
Multicopter için uçuş kontrolcüsü seçimi çok önemlidir. Birçok özellik ve fonksiyon seçeneği
geniş fiyat aralığında bulunabilir.
Her uçuş kontrolcüsü en az üç eksenli bir gyro takımı barındırır. Kalbinde ise pilottan ve
sensörlerden girdi alan, her motorun hareketine karar veren bir mikro kontrolcü bulundurur.
Çoğu uçuş kontrolcüsü tarafından sağlanan fonksiyonlara göz atacak olursak:
• Gyrostabilization: Cihazı sabit ve pilotun kontrolünde tutmaya yarar. Standart bir özelliktir.
• Self-leveling: Kumanda bırakıldığında havada sabit kalmasını sağlar.
• Carefree: Cihazın yönü değişse de cihazın orijinal baktığı yöne göre kontrol edilmesini
sağlar.
• Altitudehold: Gazı ayarlamadan yerden belirli mesafede sabit durabilmesini sağlar.
• Positionhold: Cihazın belirlediğimiz bir yerde havada asılı pozisyonda durmasını sağlar.
• Return home: Otomatik olarak kalkış yapılan yere iniş yapmasını sağlar.
• Waypointnavigation: Cihazın önceden belirlenmiş noktaları takip etmesini sağlar.
11
2. QUADCOPTERLER
2.1 QUADCOPTER TANIMI
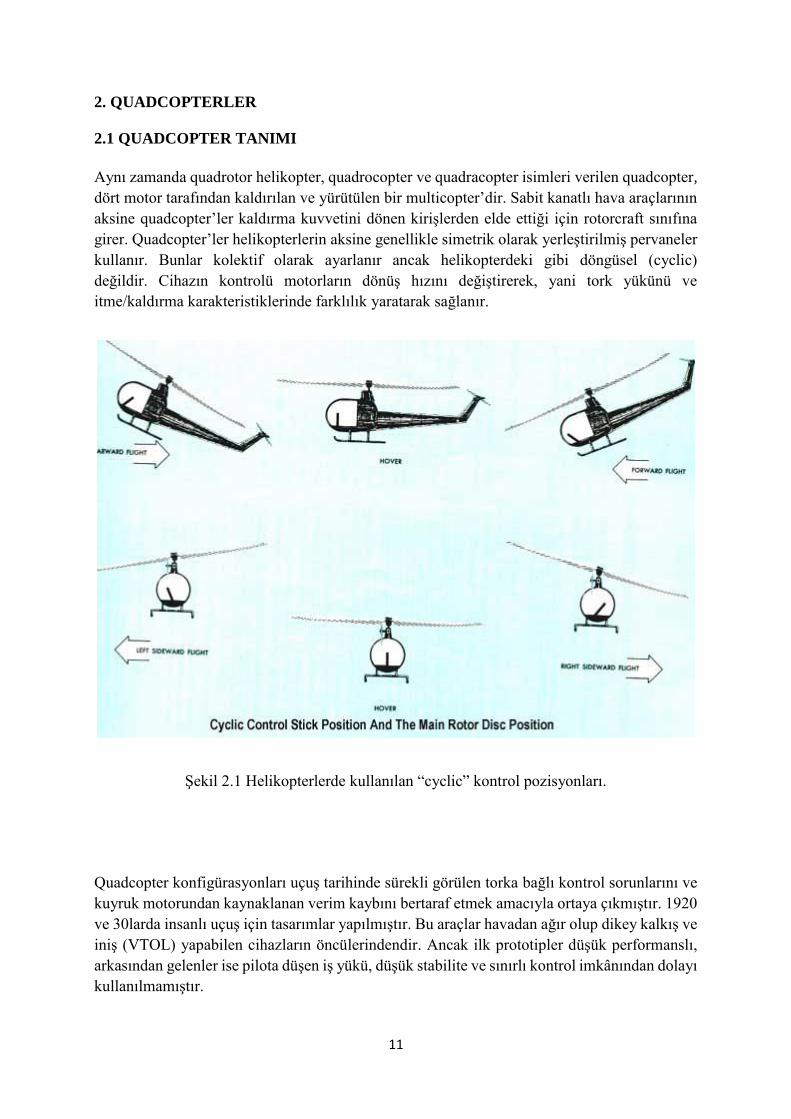
Aynı zamanda quadrotor helikopter, quadrocopter ve quadracopter isimleri verilen quadcopter,
dört motor tarafından kaldırılan ve yürütülen bir multicopter’dir. Sabit kanatlı hava araçlarının
aksine quadcopter’ler kaldırma kuvvetini dönen kirişlerden elde ettiği için rotorcraft sınıfına
girer. Quadcopter’ler helikopterlerin aksine genellikle simetrik olarak yerleştirilmiş pervaneler
kullanır. Bunlar kolektif olarak ayarlanır ancak helikopterdeki gibi döngüsel (cyclic)
değildir. Cihazın kontrolü motorların dönüş hızını değiştirerek, yani tork yükünü ve
itme/kaldırma karakteristiklerinde farklılık yaratarak sağlanır.
Şekil 2.1 Helikopterlerde kullanılan “cyclic” kontrol pozisyonları.
Quadcopter konfigürasyonları uçuş tarihinde sürekli görülen torka bağlı kontrol sorunlarını ve
kuyruk motorundan kaynaklanan verim kaybını bertaraf etmek amacıyla ortaya çıkmıştır. 1920
ve 30larda insanlı uçuş için tasarımlar yapılmıştır. Bu araçlar havadan ağır olup dikey kalkış ve
iniş (VTOL) yapabilen cihazların öncülerindendir. Ancak ilk prototipler düşük performanslı,
arkasından gelenler ise pilota düşen iş yükü, düşük stabilite ve sınırlı kontrol imkânından dolayı
kullanılmamıştır.
12
Günümüzde quadcopter tasarımları insansız hava aracı (UAV) olarak popülerleşmiştir. Bu
araçlar elektronik kontrol sistemleri ve elektronik sensörlerle stabilize olur. Küçük tasarımları
ve çevik manevra kabiliyeti sayesinde hem kapalı hem açık alanda uçurulabilirler.
Quadcopter’lerin boyut olarak benzer helikopterlere karşı bazı avantajları vardır. İlki,
quadcopter’lerin pervane açısını değiştirmek için kullanılan mekanik bağlantılara ihtiyacı
yoktur. Böylelikle tasarım ve bakımı basitleşir. İkincisi, dört motor kullanıldığı için motorların
çapının küçük olması, dolayısıyla uçuşta daha uçuş sırasında daha az kinetik enerjiye sahip
olması, böylelikle olası bir çarpışma halinde motorların daha az hasar alması. Yapım ve kontrol
kolaylığı sayesinde amatör model uçuş projelerinde quadcopter şaseleri sıklıkla
kullanılmaktadır.
2.2 QUADCOPTER’LERİN TARİHİ
2.2.1 İlk Denemeler
2.2.1.1 Oehmichen No.2 (1920)
1920’lerde EtienneOehmichenrotorcraft araçlarla denemeler yapmıştır. Deneme yaptığı altı
araçtan bir tanesi dört motorlu sekiz pervaneli No.2′dir. Oehmichen No.2 dört kol ucundaki iki
pervaneli motorlarla birlikte çelik şase kullanmıştır. Beş pervane araca dikey olarak stabilize
edilmiş olup, burun kısmında bir diğer pervane yönlendirme sağlarken, son iki pervane ise yatay
olarak bağlanıp, ileriye itme sağlamak için kullanılmıştı. Zamanına göre önemli miktarda
stabilite sunan bu araç, 1920lerin ortalarında binden fazla test uçuşu yapmıştır. 1923 yılında
havada birkaç dakika kalabilmiş, 14 Nisan 1924′te ise 360 metre giderek FAI (Uluslarası
Havacılık Federasyonu) helikopterler için mesafe rekorunu kırmıştır. Dairesel bir rotayı
tamamlayıp daha sonra ilk 1 kilometrelik kapalı devre uçuşu bir rotorcraftla tamamlamıştır.
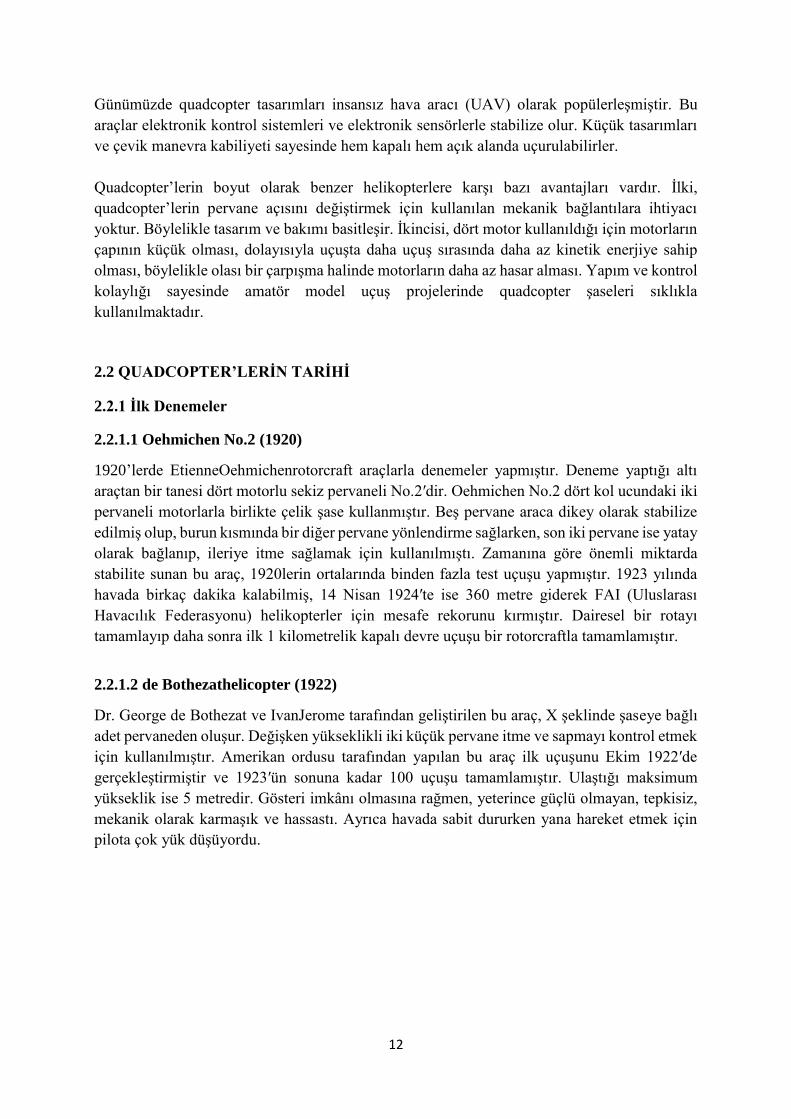
2.2.1.2 de Bothezathelicopter (1922)
Dr. George de Bothezat ve IvanJerome tarafından geliştirilen bu araç, X şeklinde şaseye bağlı
adet pervaneden oluşur. Değişken yükseklikli iki küçük pervane itme ve sapmayı kontrol etmek
için kullanılmıştır. Amerikan ordusu tarafından yapılan bu araç ilk uçuşunu Ekim 1922′de
gerçekleştirmiştir ve 1923′ün sonuna kadar 100 uçuşu tamamlamıştır. Ulaştığı maksimum
yükseklik ise 5 metredir. Gösteri imkânı olmasına rağmen, yeterince güçlü olmayan, tepkisiz,
mekanik olarak karmaşık ve hassastı. Ayrıca havada sabit dururken yana hareket etmek için
pilota çok yük düşüyordu.
13
Şekil 2.2 de Bothezat, 1923
2.2.1.3 Convertawings Model A Quadrotor (1956)
Bu özgün helikopterin çok daha büyük bir sivil ve askeri quadrotor’a prototip olması
planlanmıştı. Tasarımı iki adet motorun v kayışıyla dört rotoru döndürmesi şeklindedir. Kontrol
ise kuyruk motoruna ihtiyaç duyulmadan, motorların itme gücünü değiştirerek sağlanmıştır.
1950’lerin ortasında birçok kez başarılı bir şekilde uçmuştur. Ayrıca ileri uçuş yapabilen ilk
dört rotorlu hava taşıtıdır. Sipariş düşüklüğü sebebiyle proje iptal edilmiştir. Convertawings
ayrıca 19ton maksimum kapasiteli, 4.9ton taşıyıp 278 km/s hızıyla 300 mil menzile gidebilen
bir Model E tasarlamıştır.
2.2.1.4 Curtiss-Wright VZ-7 (1958)
Curtiss-Wright VZ-7, Curtiss-Wright firması tarafından Amerikan Ordusu için dikey iniş ve
kalkış (VTOL) yapabilecek şekilde tasarlanmıştır. Kontrolü dört motorun itme gücünü
değiştirerek sağlanmıştır.
2.2.1.5 Güncel Değişiklikler
İnsansız Hava Araçları (UAV) son yıllarda birçok uygulama için yoğun olarak
kullanılmaktadır. Hava araçlarındaki manevra kabiliyetine ve havada sabit kalma özelliğine
olan ihtiyaç günümüzdeki quadcopter araştırmalarına sebep olmuştur. Dört motorlu tasarım
hem basit hem de güvenilir ve manevra kabiliyetinin yüksek olmasına olanak sağlar. Son
teknoloji araştırma çalışmaları quadcopter’lerin çoklu-araç iletişimi, çevre araştırmaları ve
manevra kabiliyeti için geliştirmeleri uygulanabilir hale getirmektedir. Eğer bu gelişen
teknoloji birleşebilirse, quadcopter’ler başka araçlar tarafından yapılması mümkün olmayan
gelişmiş otonom görevleri gerçekleştirebilecek.
14
2.2.2 Günümüz Programlarından Bazıları
Bell Boeing QuadTiltRotor sabit quadcopter konseptini tiltrotolarla kombine ederek C-
130 boyunda bir konseptle ileriye götürüyor.
AermaticaSpa’danAnteos ilk resmi izinli sivil hava sahasında uçabilen rotary kanatlı
RPA(uzaktan kontrol edilen hava aracı) olup, ileride ayrılmamış hava sahasında uçuş
yapabilecek ilk hava aracıdır.
AeroQuad ve ArduCopter açık kaynaklı donanıma ve yazılıma sahip, Arduino tabanlı
DIY quadcopter projesidir.
ParrotAR.Drone üstünde Parrot SA tarafından üretilmiş kameralar olan küçük RC bir
quadcopterdir. Akıllı telefon veya tabletlerle kontrol edilmek için tasarlanmıştır.
Haziran 2013′te Paris Air Show’da 500.000 den fazla satıldığı açıklanmıştır.
Şekil 2.3 Parrot AR. Drone’un uçan prototipi
15
Şekil 2.4 Parrot AR. Drone 2.0 kalkerken, Nevada 2012
2.3 KULLANIM ALANLARI
2.3.1 Araştırma Platformu
Quadcopter’ler üniversite araştırmalarında, uçuş kontrol teorisi, navigasyon, gerçek zamanlı
sistemler ve robot teknolojisi gibi birçok alanda test ve değerlendirme de kullanılır. Son yıllarda
çoğu üniversitede giderek artan bir şekilde karışık manevralar yapan quadcopter’ler
görülmüştür. Sürü halindeki quadcopter’ler formasyon halinde havada durarak takla, halkadan
geçme ve grup olarak bir pencereden geçme gibi karışık görev görevleri uygulayabilir.
Quadcopter’lerin çok amaçlı test platformu olarak kullanılmasında birçok avantaj vardır.
Fiyatlarının düşüklüğü, boyut çeşitliliği ve basit mekanik tasarımı sayesinde amatörler
tarafından toplanıp bakımları yapılabilir. Çok dallı yapısı sayesinde birçok farklı alandan
akademisyenin bir araya girerek geliştirme yapmasına imkân tanır. Quadrokopter projeleri
genel olarak bilgisayar mühendisliği, elektrik mühendisliği ve mekanik mühendisliği
uzmanlarının bir araya gelmesiyle oluşur.
Manevra kabiliyetleri çok yüksek olduğu için quadcopter’ler her durumda ve ortamda
kullanılabilir. Ayrıca otonom şekilde insana ihtiyaç olmadan uçabilirler. Bunlar yıllar boyunca
artan araştırmaların başlıca sebebidir.
16
Dünya çapında bazı araştırma labratuarları daha gelişmiş kontrol teknikleri ve araştırmalar için
çalışmaktadır. Bunların başlıcaları MIT AerospaceControlsLab, ETH Flying Machine Arena
ve Pennsylvania General Robotics, Automation, SensingandPerception (GRASP)’dır.
2.3.2 Asker ve Güvenlik Güçleri
Quadcopter insansız hava araçları asker ve güvenlik güçleri tarafından takip, keşif ve kentsel
alandaki arama kurtarma çalışmaları için kullanılır. Bunun bir örneği küçük ve sessiz bir UAV
olan, Kanadalı AeryonLabs tarafından üretilen AeryonScout’tır. Şirket Orta Amerika’daki
uyuşturucu kaçakçısının ormanın derinliklerinde kıstırılması sırasında önemli bir rol oynadığını
iddia etmiştir.
2.3.3 Ticari
Quadcopter’lerin en çok kullanıldığı alan havadan çekimlerdir. Maliyet düşüklüğü ve otonom
uçuş özelliği sayesinde quadcopter’ler bu işler için çok uygundur. Quadcopter’lerle havadan
fotoğraf çekmek GPS koordinatlarını girip bir tuşa basmak kadar basittir. On-board kameraları
sayesinde kullanıcılar görüntüyü canlı olarak yere aktarabilir. Emlak fotoğraflamadan
endüstriyel sistem denetimine kadar birçok firma tarafından kullanılır. Çeşitli kuruluşlar
quadcopter’lerin kapalı devre televizyon özelliklerinden yararlanarak yerdeki hareketliliği takip
eder.
2.3.4 Uçuş Kontrolü
Her motor merkezinden bir itme gücü ve tork üretir, bunun yanında cihazın uçuş yönünün
aksine bir sürükleme kuvveti oluşur. Bütün motorlar eşit açısal hızda dönüyorsa, birinci ve
üçüncü motorla ikinci ve dördüncü motor ters yönlere dönüyorsa, toplam aerodinamik tork ve
bundan dolayı yalpa eksenine etkiyen açısal hızlanma sıfırdır. Yani konvansiyonel
helikopterlerde kullanılan sapmayı stabilize eden motora ihtiyaç yoktur. Sapmaya aerodinamik
torkların arasındaki uyuşmazlık sebep olur.
Pitch ve roll eksenlerine etkiyen açısal hızlanma yalpa eksenine etki etmeden uygulanabilir.
Aynı yöne dönen her pervane pitch veya roll ekseninden birini kontrol eder ve bir motorun itme
kuvvetini arttırırken diğerini azaltmak yalpa stabilitesi için gerekli olan tork dengesini
koruyarak roll veya pitch eksenine tork uygulanmasını sağlar. Böylelikle, sabit pervaneler
quadrotorların her eksene manevrasını sağlar. Öteleme ivmesi ise sıfır olmayan bir pitch veya
roll açısıyla sağlanır.
Üç, altı veya başka bir sayıda motor yerine dört motor kullanılmasının sebebi dört motorun iki
uygun dönel simetriye sahip olmasıdır. Dört motorla itmeyi yanlara verip roll hareketi yapmak
kolaydır. İki aynı yöne dönen motorun birinin hızının artıp diğerinin azalmasıyla toplam tork
ve yalpaya uygulanan güç sıfır olarak kalır. Klasik bir helikopteri kontrol ederken ana motordan
gelen torku dengeleyip yalpa kontrolü uygulamak zor bir işlemdir ve hatırı sayılır ölçüde pratik
17
gerektirir. Quadcopter’in ise yalpa kontrolü doğuştan dengededir. Ana kontroller değişse de
öğrenmesi daha kolaydır. Günümüzde kaliteli quadcopter’ler kendinden gyroscope’lu olup
yalpayı daha eksiksiz stabilize eder.
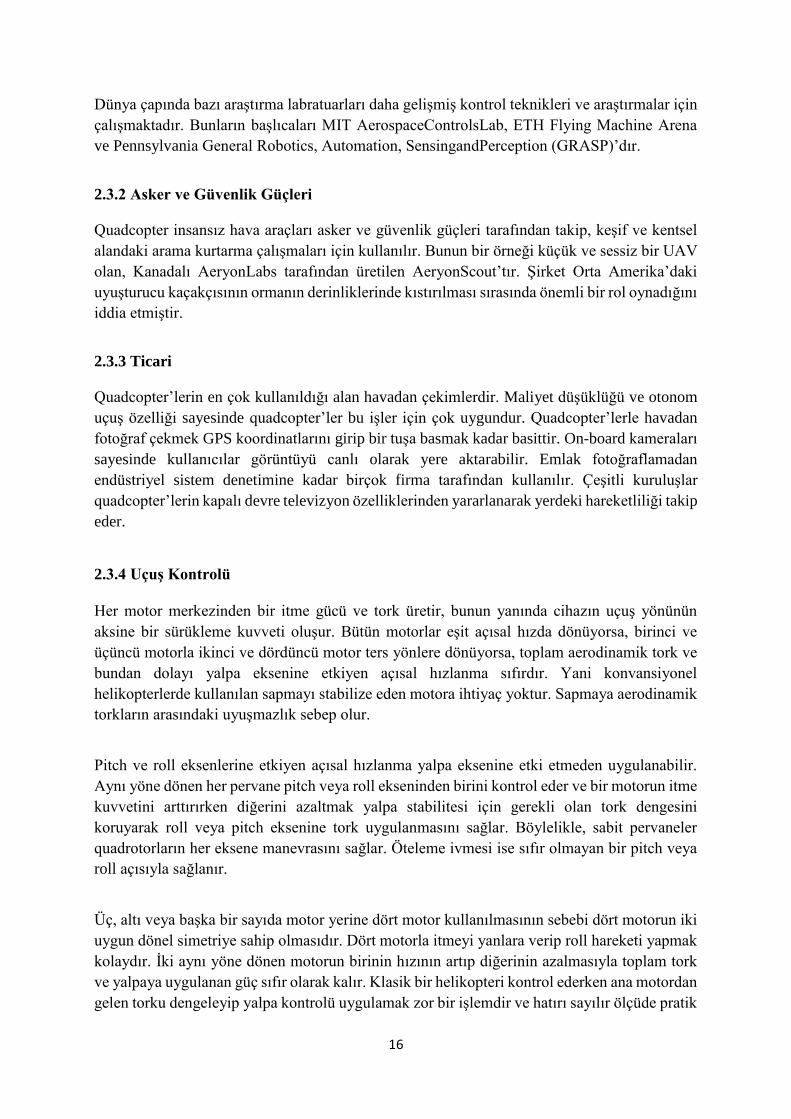
Quadcopter’lerin motorları “elmas” veya “kare” şeklinde dizilebilir.
Şekil 2.5 Quadcopter özdeş motorlarının dönüş yönleri
18
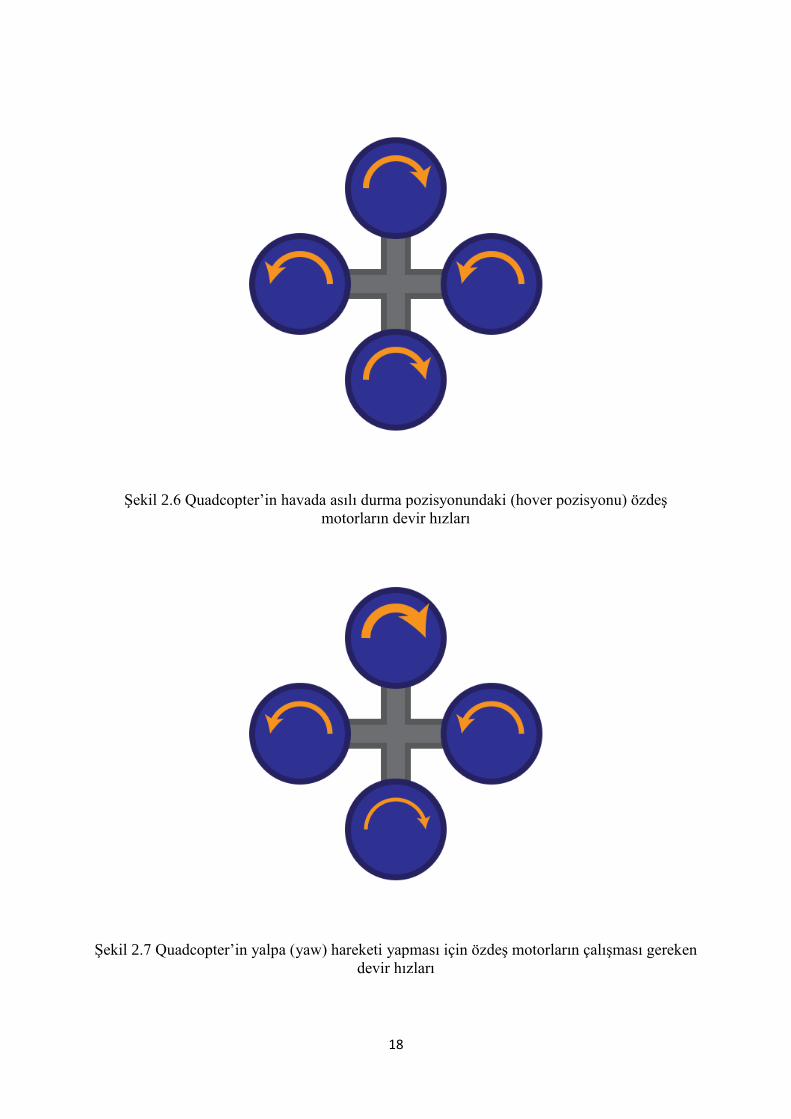
Şekil 2.6 Quadcopter’in havada asılı durma pozisyonundaki (hover pozisyonu) özdeş
motorların devir hızları
Şekil 2.7 Quadcopter’in yalpa (yaw) hareketi yapması için özdeş motorların çalışması gereken
devir hızları
19
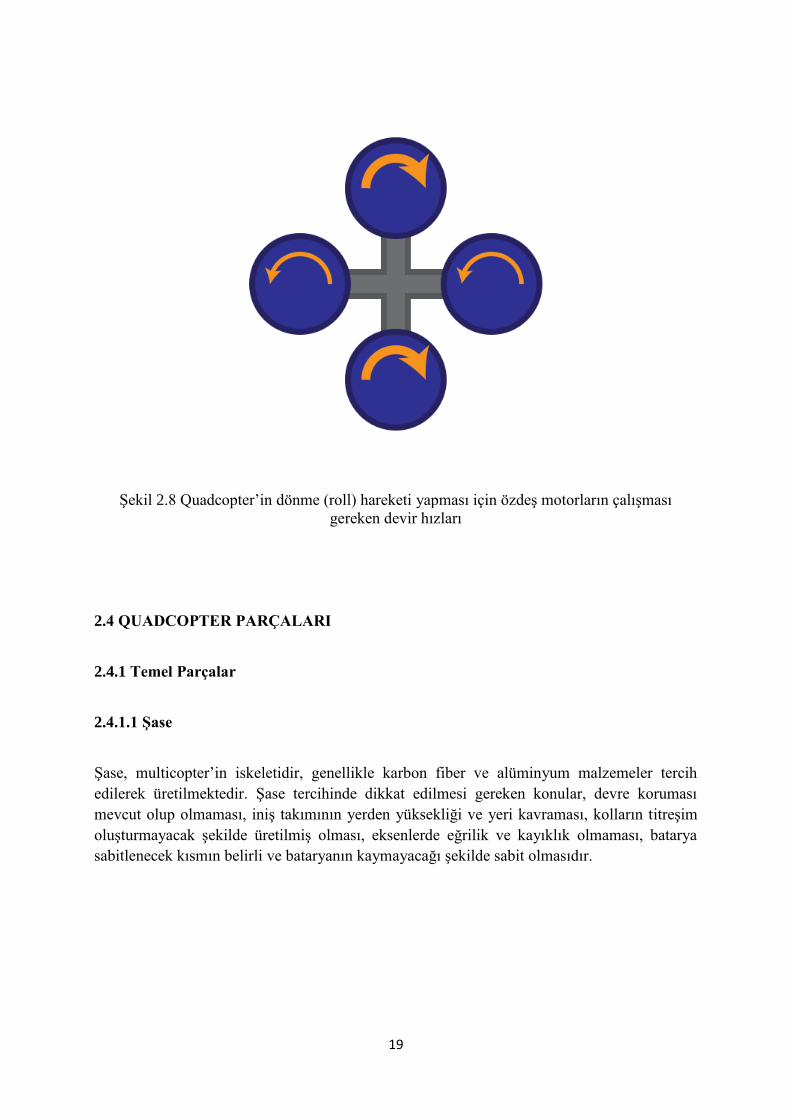
Şekil 2.8 Quadcopter’in dönme (roll) hareketi yapması için özdeş motorların çalışması
gereken devir hızları
2.4 QUADCOPTER PARÇALARI
2.4.1 Temel Parçalar
2.4.1.1 Şase
Şase, multicopter’in iskeletidir, genellikle karbon fiber ve alüminyum malzemeler tercih
edilerek üretilmektedir. Şase tercihinde dikkat edilmesi gereken konular, devre koruması
mevcut olup olmaması, iniş takımının yerden yüksekliği ve yeri kavraması, kolların titreşim
oluşturmayacak şekilde üretilmiş olması, eksenlerde eğrilik ve kayıklık olmaması, batarya
sabitlenecek kısmın belirli ve bataryanın kaymayacağı şekilde sabit olmasıdır.

20
Şekil 2.9 Açık kaynak kodlu bir proje olan ArduCopter’in şasesi
2.4.1.2 Kontrol Kartı (Uçuş Kontrolcüsü)
Piyasada çeşitli fiyatlarda ve kapasitelerde uçuş kontrolcü birimleri mevcuttur. Bu birim
sistemin beynidir ve tüm dengede kalma, kumanda verisi okuma, batarya kontrolü gibi kritik
işlemler bu birim sayesinde gerçekleştirilmektedir. Bu kapsamda sistem üzerindeki en kritik
parçadır ve profesyonel sistemlerde Çin üretimi olan düşük kaliteli uçuş kontrolcülerin
kullanılması önerilmez.
Şekil 2.10 Üst düzey bir kontrol kartı
21
2.4.1.3 Motor ve Pervane
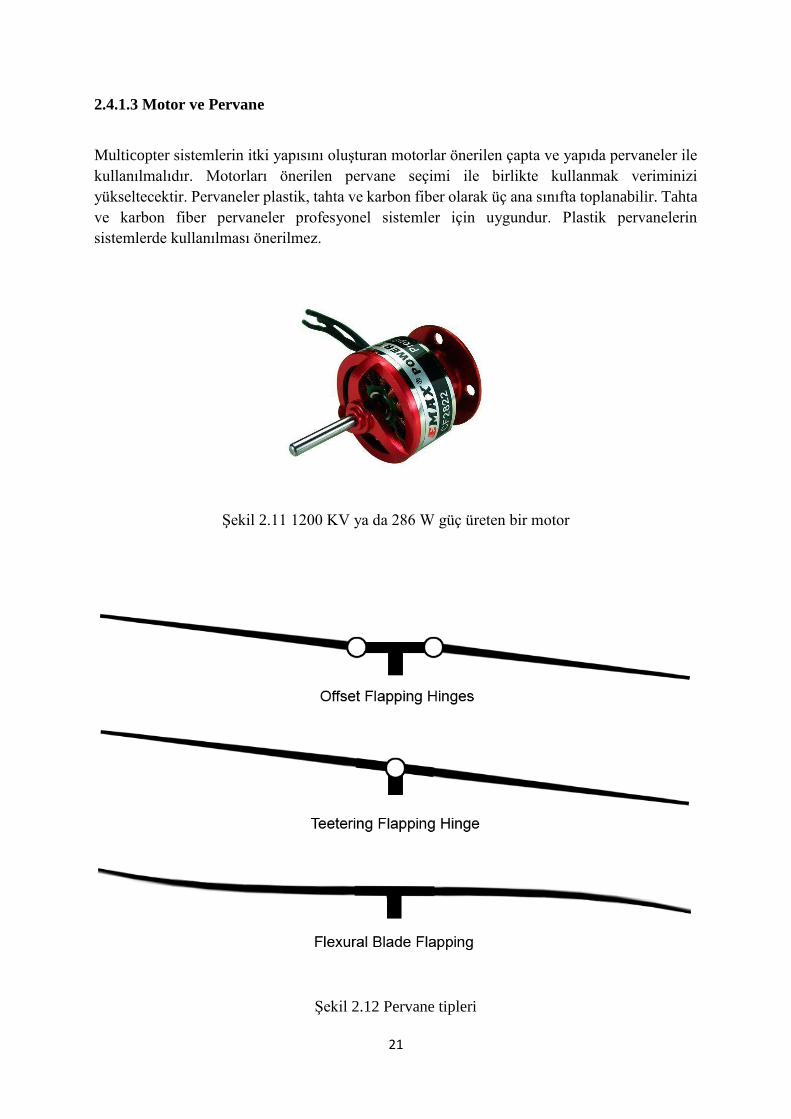
Multicopter sistemlerin itki yapısını oluşturan motorlar önerilen çapta ve yapıda pervaneler ile
kullanılmalıdır. Motorları önerilen pervane seçimi ile birlikte kullanmak veriminizi
yükseltecektir. Pervaneler plastik, tahta ve karbon fiber olarak üç ana sınıfta toplanabilir. Tahta
ve karbon fiber pervaneler profesyonel sistemler için uygundur. Plastik pervanelerin
sistemlerde kullanılması önerilmez.
Şekil 2.11 1200 KV ya da 286 W güç üreten bir motor
Şekil 2.12 Pervane tipleri
22
2.4.1.4 Motor Sürücü (ESC)
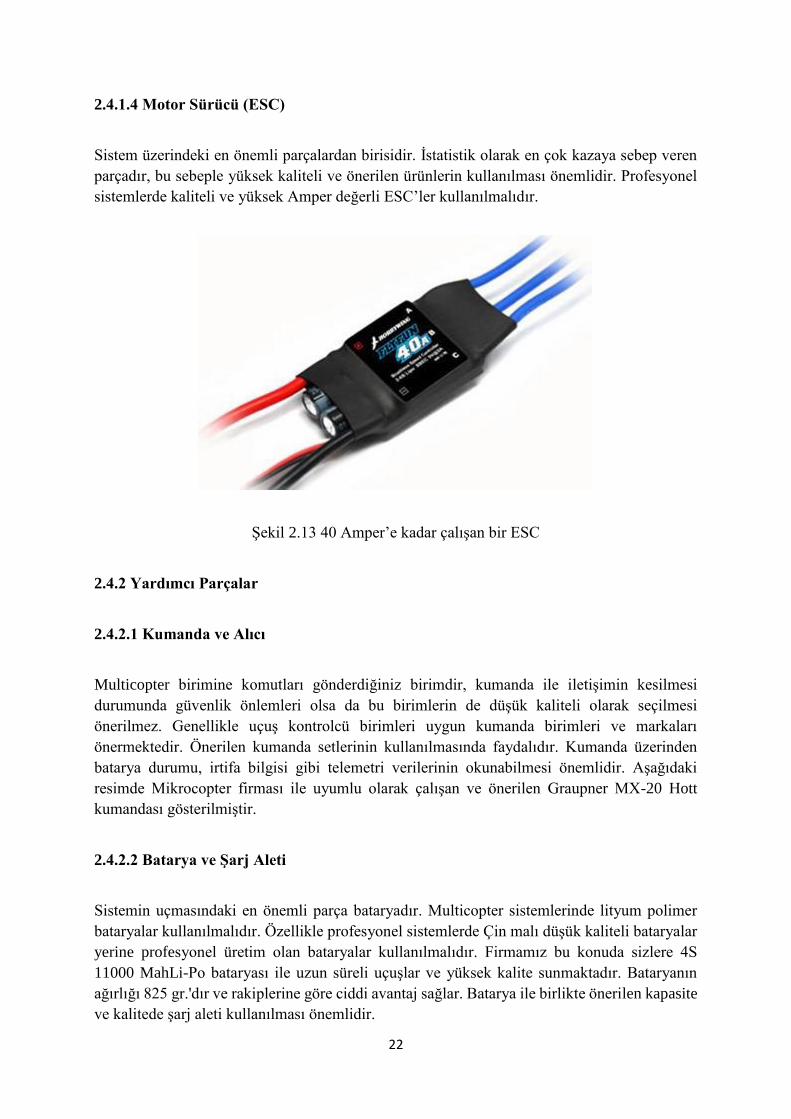
Sistem üzerindeki en önemli parçalardan birisidir. İstatistik olarak en çok kazaya sebep veren
parçadır, bu sebeple yüksek kaliteli ve önerilen ürünlerin kullanılması önemlidir. Profesyonel
sistemlerde kaliteli ve yüksek Amper değerli ESC’ler kullanılmalıdır.
Şekil 2.13 40 Amper’e kadar çalışan bir ESC
2.4.2 Yardımcı Parçalar
2.4.2.1 Kumanda ve Alıcı
Multicopter birimine komutları gönderdiğiniz birimdir, kumanda ile iletişimin kesilmesi
durumunda güvenlik önlemleri olsa da bu birimlerin de düşük kaliteli olarak seçilmesi
önerilmez. Genellikle uçuş kontrolcü birimleri uygun kumanda birimleri ve markaları
önermektedir. Önerilen kumanda setlerinin kullanılmasında faydalıdır. Kumanda üzerinden
batarya durumu, irtifa bilgisi gibi telemetri verilerinin okunabilmesi önemlidir. Aşağıdaki
resimde Mikrocopter firması ile uyumlu olarak çalışan ve önerilen Graupner MX-20 Hott
kumandası gösterilmiştir.
2.4.2.2 Batarya ve Şarj Aleti
Sistemin uçmasındaki en önemli parça bataryadır. Multicopter sistemlerinde lityum polimer
bataryalar kullanılmalıdır. Özellikle profesyonel sistemlerde Çin malı düşük kaliteli bataryalar
yerine profesyonel üretim olan bataryalar kullanılmalıdır. Firmamız bu konuda sizlere 4S
11000 MahLi-Po bataryası ile uzun süreli uçuşlar ve yüksek kalite sunmaktadır. Bataryanın
ağırlığı 825 gr.'dır ve rakiplerine göre ciddi avantaj sağlar. Batarya ile birlikte önerilen kapasite
ve kalitede şarj aleti kullanılması önemlidir.
23
2.4.2.3 Telemetri Alıcı ve Verici
Multicopter sisteminde sistemin batarya durumu, irtifası, hızı, pozisyonu gibi verilerine
telemetri verileri denir. Bu verileri bilgisayar üzerine aktaran ve bilgisayar yazılımı üzerindeki
harita uçuşu gibi komutları hava aracına aktaran birimdir. Uçuş kontrolcü sisteminin önerdiği
marka ve model ürünlerin kullanılması gerekmektedir.
2.4.2.4 Kablosuz Görüntü Aktarımı
Multicopter sisteminin havada uçma amacı görüntü çekmektir, çekilen görüntünün yere
aktarılmasını sağlayan birimdir. Kumanda sinyali ve telemetri sinyali ile çakışmayacak frekans
üzerinden bu aktarımın gerçekleşmesi gerekmektedir.
2.4.2.5 Gimbal
Gimbal (kamera sabitleme sistemi) kameranızın bağlandığı ve hava aracının hareket ve
sallantılarından görüntünüzün etkilenmemesini sağlayan kısımdır. Gimbal seçimi kullanılacak
şase ve kameraya göre gerçekleştirilmelidir. DSLR kameralar gibi büyük boyutlu kameralar
kullanacaksanız, bu kameralara uygun gimbal’ler tercih edilmelidir. Gimbal ve şase bağlantısı
arasında kauçuk tarzı pasif titreşim emini elemanlar kullanılmalıdır. Firmamız olarak bu
kısımlarda gerçekleştirdiğimiz titreşim testlerine göre uygun frekansları sönümleyecek titreşim
emici elemanları kullanmaktayız.
2.4.2.6 Diğer Aksesuarlar
Multicopter sistemlerinde eksen hassasiyeti ve parça kalitesi önemlidir, bu anlamda uçuşunuzu
destekleyecek birçok aksesuar mevcuttur. Sistemin taşınması için taşıma çantaları, uçuş
uygunluğunu ölçebilmek için rüzgâr ölçer, motor temizliği için temizleyici spreyler, Bilgisayar
için güneşlik gibi birçok aksesuar mevcuttur.

24
3. QUADCOPTER DİNAMİĞİ
3.1 KUVVET DENKLEMLERİ
Newton’un birinci ve ikinci yasaları gereği:
∑𝐹𝑛𝑒𝑡 = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · [�̈��̈��̈�
] (3.1)
3.1.1 Quadcopter’in Ağırlığı
Dünyadaki bir cisme 𝑔 kadar ivme uygulandığını biliyoruz ve yine Newton’un yasaları gereği:
𝐹𝑔 = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · [0𝑔0] (3.2)
3.1.2 İtme Kuvvetleri
Motorların uyguladığı itme kuvvetini ise:
𝐹𝑖𝑡𝑚𝑒 = [sin𝛼 · 𝐹𝑀1 + 𝑠𝑖𝑛𝛼 · 𝐹𝑀2 + 𝑠𝑖𝑛𝛼 · 𝐹𝑀3 + 𝑠𝑖𝑛𝛼 · 𝐹𝑀4
𝑐𝑜𝑠𝛼 · 𝐹𝑀1 + 𝑐𝑜𝑠𝛼 · 𝐹𝑀2 + 𝑐𝑜𝑠𝛼 · 𝐹𝑀3 + 𝑐𝑜𝑠𝛼 · 𝐹𝑀4
0] (3.3)
şeklinde ifade edebiliriz.
Kalkış sırasında 𝛼 = 0 olacağı için bu denklemi kalkış için:
𝐹𝑖𝑡𝑚𝑒,𝑘𝑎𝑙𝑘𝚤ş = [0
𝐹𝑀1 + 𝐹𝑀2 + 𝐹𝑀3 + 𝐹𝑀4
0] (3.4)
şeklinde yazabiliriz.
3.1.3 Direnç Kuvveti
Seyir esnasında bir direnç (ya da sürtünme) kuvveti oluşacağını biliyoruz. Bu kuvvet:
𝐹𝑑𝑖𝑟𝑒𝑛ç = 𝑚 ·1
2· 𝜌 · 𝑉2 · 𝑆𝑤 · 𝐶𝐷 (3.5)
25
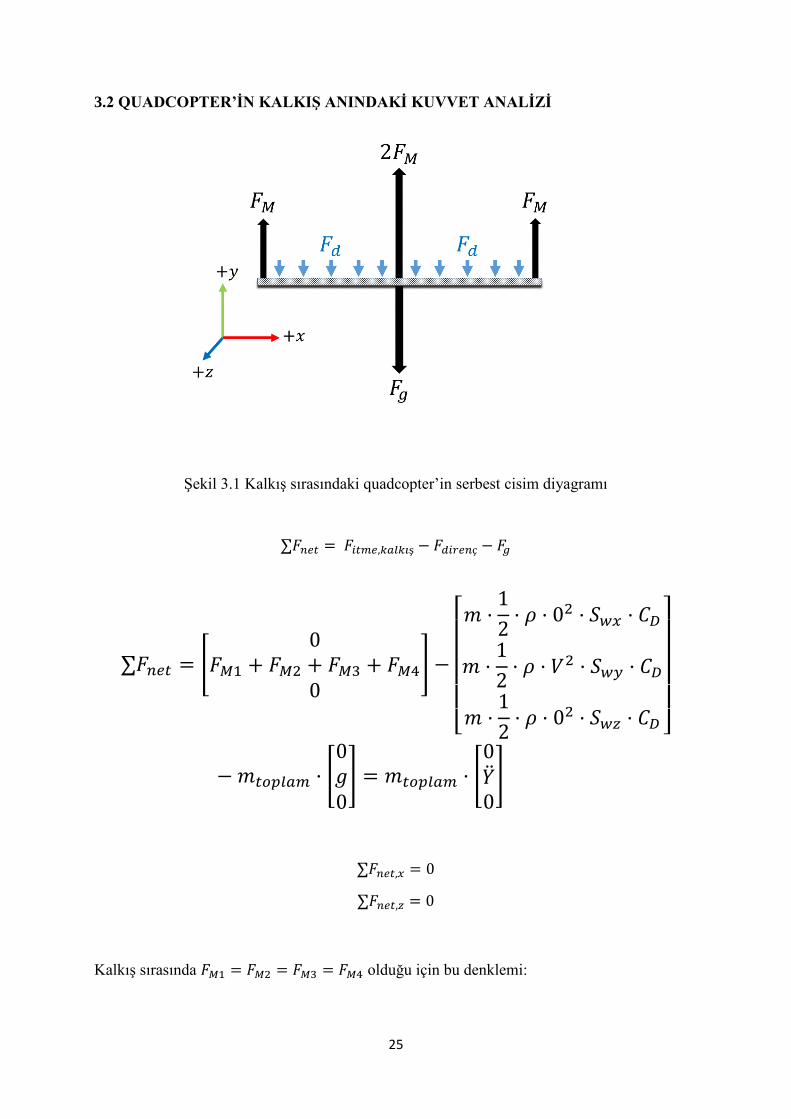
3.2 QUADCOPTER’İN KALKIŞ ANINDAKİ KUVVET ANALİZİ
Şekil 3.1 Kalkış sırasındaki quadcopter’in serbest cisim diyagramı
∑𝐹𝑛𝑒𝑡 = 𝐹𝑖𝑡𝑚𝑒,𝑘𝑎𝑙𝑘𝚤ş − 𝐹𝑑𝑖𝑟𝑒𝑛ç − 𝐹𝑔
∑𝐹𝑛𝑒𝑡 = [0
𝐹𝑀1 + 𝐹𝑀2 + 𝐹𝑀3 + 𝐹𝑀4
0] −
[ 𝑚 ·
1
2· 𝜌 · 02 · 𝑆𝑤𝑥 · 𝐶𝐷
𝑚 ·1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑦 · 𝐶𝐷
𝑚 ·1
2· 𝜌 · 02 · 𝑆𝑤𝑧 · 𝐶𝐷 ]
− 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · [0𝑔0] = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · [
0�̈�0]
∑𝐹𝑛𝑒𝑡,𝑥 = 0
∑𝐹𝑛𝑒𝑡,𝑧 = 0
Kalkış sırasında 𝐹𝑀1 = 𝐹𝑀2 = 𝐹𝑀3 = 𝐹𝑀4 olduğu için bu denklemi:

26
∑𝐹𝑛𝑒𝑡,𝑦 = (4𝐹𝑀) − (𝑚 ·1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑦 · 𝐶𝐷) − (𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔) = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�
şeklinde yazabiliriz. Buradan:
𝐹𝑀 =𝑚
4· (
1
2· 𝜌 · 𝑉2 · 𝑆𝑤 · 𝐶𝐷 + 𝑔 + �̈�) (3.6)
ederiz.
Ayrıca quadcopter havada asılı halde (hover pozisyonunda) durduğu andaki denklemi yazarsak:
𝐹𝑑𝑖𝑟𝑒𝑛ç = 0
∑𝐹𝑛𝑒𝑡,𝑧 = (4𝐹𝑀) − (𝑚 ·1
2· 𝜌 · 02 · 𝑆𝑤𝑧 · 𝐶𝐷) − (𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔) = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�
∑𝐹𝑛𝑒𝑡,𝑧 = (4𝐹𝑀) − (𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔) = 0
Buradan quadcopter’in havada asılı kalabilmesi için en az gereken toplam motor kuvvetini:
∑𝐹𝑀 = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
ve 𝐹𝑀1 = 𝐹𝑀2 = 𝐹𝑀3 = 𝐹𝑀4 olduğu için quadcopter’in havada asılı kalabilmesi için tek bir
motorun üretmesi gereken minimum itki kuvvetini bulabiliriz:
𝐹𝑀,𝑚𝑖𝑛 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 (3.7)
Bu durumda:
𝐹𝑀 >𝑚𝑡𝑜𝑝𝑙𝑎𝑚·𝑔
4 ise quadcopter’in ivmesi +𝑦 yönünde
𝐹𝑀 <𝑚𝑡𝑜𝑝𝑙𝑎𝑚·𝑔
4 ise quadcopter’in ivmesi −𝑦 yönünde olur.
Dolayısıyla:
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 (3.8)
denkleminden bulduğumuz 𝐹𝑀 değeri üzerindeki herhangi bir değeri seçip kalkış durumu için
analiz yapmamız mümkün.
27
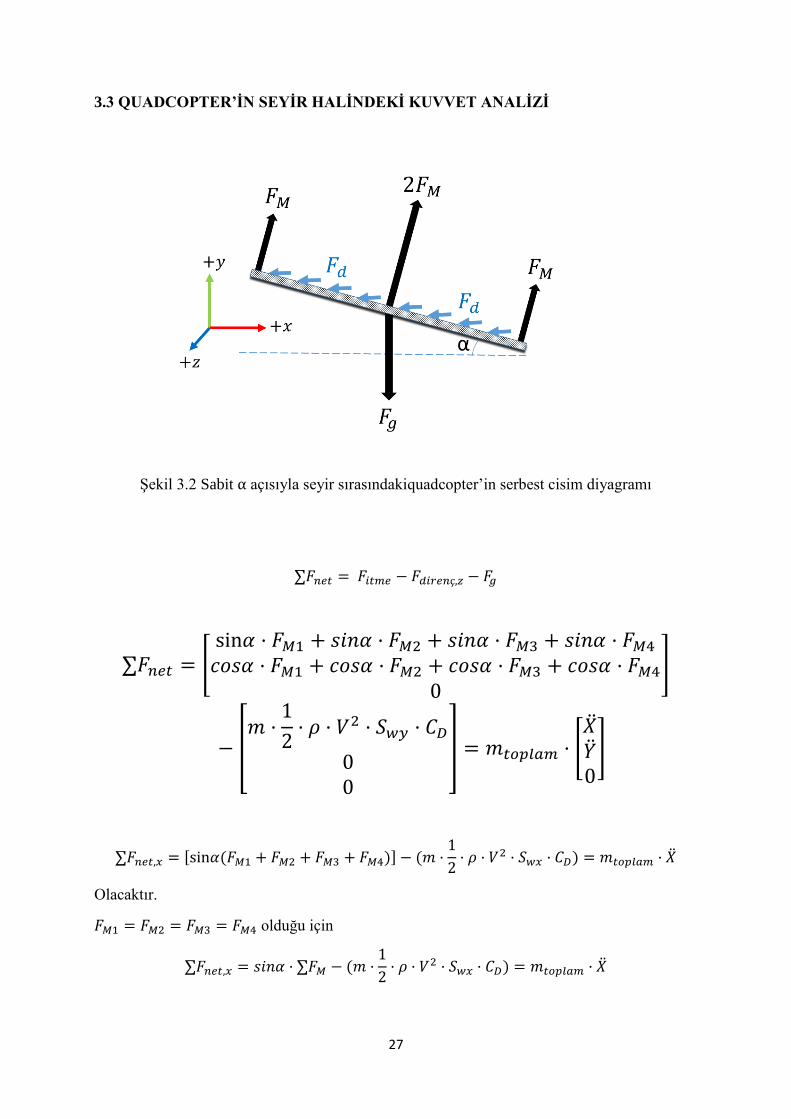
3.3 QUADCOPTER’İN SEYİR HALİNDEKİ KUVVET ANALİZİ
Şekil 3.2 Sabit α açısıyla seyir sırasındakiquadcopter’in serbest cisim diyagramı
∑𝐹𝑛𝑒𝑡 = 𝐹𝑖𝑡𝑚𝑒 − 𝐹𝑑𝑖𝑟𝑒𝑛ç,𝑧 − 𝐹𝑔
∑𝐹𝑛𝑒𝑡 = [sin𝛼 · 𝐹𝑀1 + 𝑠𝑖𝑛𝛼 · 𝐹𝑀2 + 𝑠𝑖𝑛𝛼 · 𝐹𝑀3 + 𝑠𝑖𝑛𝛼 · 𝐹𝑀4
𝑐𝑜𝑠𝛼 · 𝐹𝑀1 + 𝑐𝑜𝑠𝛼 · 𝐹𝑀2 + 𝑐𝑜𝑠𝛼 · 𝐹𝑀3 + 𝑐𝑜𝑠𝛼 · 𝐹𝑀4
0]
− [𝑚 ·
1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑦 · 𝐶𝐷
00
] = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · [�̈��̈�0
]
∑𝐹𝑛𝑒𝑡,𝑥 = [sin𝛼(𝐹𝑀1 + 𝐹𝑀2 + 𝐹𝑀3 + 𝐹𝑀4)] − (𝑚 ·1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑥 · 𝐶𝐷) = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�
Olacaktır.
𝐹𝑀1 = 𝐹𝑀2 = 𝐹𝑀3 = 𝐹𝑀4 olduğu için
∑𝐹𝑛𝑒𝑡,𝑥 = 𝑠𝑖𝑛𝛼 · ∑𝐹𝑀 − (𝑚 ·1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑥 · 𝐶𝐷) = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�

28
∑𝐹𝑛𝑒𝑡,𝑦 = [cosα (𝐹𝑀1 + 𝐹𝑀2 + 𝐹𝑀3 + 𝐹𝑀4)] − (𝑚 ·1
2· 𝜌 · 02 · 𝑆𝑤𝑦 · 𝐶𝐷) − 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
= 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�
𝑦 ekseninde 𝑉 = 0 olduğu için 𝑆𝑤𝑦’nin de bir önemi kalmıyor.
𝐹𝑑𝑖𝑟𝑒𝑛ç,𝑦 = 0
𝑐𝑜𝑠𝛼 · ∑𝐹𝑀 − 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔 = 0
ve
𝑐𝑜𝑠𝛼 · ∑𝐹𝑀 = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
olur. 𝐹𝑀1 = 𝐹𝑀2 = 𝐹𝑀3 = 𝐹𝑀4 olduğu için de tek bir motorun uygulaması gereken kuvvet
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼 (3.9)
olmalıdır.
𝐹𝑀 <𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼
ise quadcopter’in ivmesi −𝑦 yönünde
𝐹𝑀 >𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼
ise quadcopter’in ivmesi +𝑦 yönünde olacaktır.
Dolayısıyla quadcopter’in sadece ±𝑥 yönünde hareket etmesini istiyorsak:
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼 (3.9)
olmak zorundadır. Testimizi +𝑦 yönünde giden bir quadcopter için yaptığımıza göre 𝐹𝑀’i
buradan çekip bulduğumuz değeri analiz için kullanacağımız program olan MSC ADAMS’a
girebiliriz. 𝐹𝑀’i bulmak için belirlememiz gerken tek bilinmeyen α açısıdır. Piyasadaki
quadcopter’ler kontrolcüden alınan hız verilerine göre çeşitli α açılarında hareket
edebilmektedirler. Genelde 35° üzeri açılarda quadcopter üzerinde gereğinden fazla gerilme
oluşacağından kullanılmaz. Biz testimizi α=10°, 20° ve 30° için ayrı ayrı yapıp bulduğumuz
değerleri karşılaştıracağız.

29
Ayrıca bu denklemden quadcopter’imizi+𝑦 yönünde hızlandırmak için açıyı değiştirmediğimiz
sürece motorun devrini arttıramayacağımızı anlıyoruz.
Bulduğumuz 𝐹𝑀 değeri
∑𝐹𝑛𝑒𝑡,𝑥 = 𝑠𝑖𝑛𝛼 · ∑𝐹𝑀 − (𝑚 ·1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑥 · 𝐶𝐷) = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�
denkleminde yerine yazılırsa:
∑𝐹𝑛𝑒𝑡,𝑥 = 𝑠𝑖𝑛𝛼 ·𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼− (𝑚 ·
1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑥 · 𝐶𝐷) = 𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · �̈�
denklemi elde edilir. Buradan gerekli sadeleştirmeler yapılırsa:
�̈� =𝑡𝑎𝑛𝛼. 𝑔
4−
1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑥 · 𝐶𝐷 (3.10)
Denklemini elde ederiz. Bu denklemden görüleceği üzere ±𝑥 yönündeki çizgisel ivmeye (�̈�)
kütlenin hiçbir etkisi yoktur.
30
4. DİNAMİK ANALİZ
4.1 QUADCOPTER’İN TIRMANIŞ ANINDAKİ DİNAMİK ANALİZİ
Şekil 4.1 Quadcopter’in MSC ADAMS üzerindeki izometrik görüntüsü
Şekil 4.2 Quadcopter’in MSC ADAMS üzerindeki üstten görünüşü
31
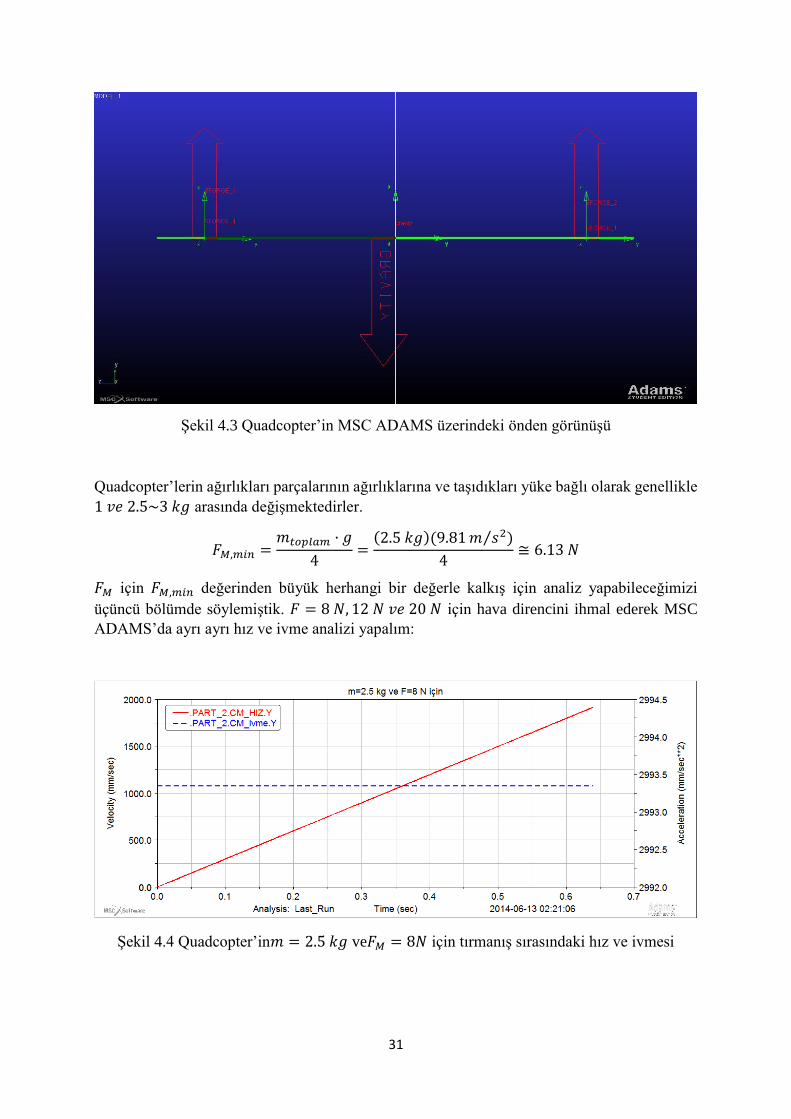
Şekil 4.3 Quadcopter’in MSC ADAMS üzerindeki önden görünüşü
Quadcopter’lerin ağırlıkları parçalarının ağırlıklarına ve taşıdıkları yüke bağlı olarak genellikle
1 𝑣𝑒 2.5~3 𝑘𝑔 arasında değişmektedirler.
𝐹𝑀,𝑚𝑖𝑛 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4=
(2.5 𝑘𝑔)(9.81𝑚 𝑠2)⁄
4≅ 6.13 𝑁
𝐹𝑀 için 𝐹𝑀,𝑚𝑖𝑛 değerinden büyük herhangi bir değerle kalkış için analiz yapabileceğimizi
üçüncü bölümde söylemiştik. 𝐹 = 8 𝑁, 12 𝑁 𝑣𝑒 20 𝑁 için hava direncini ihmal ederek MSC
ADAMS’da ayrı ayrı hız ve ivme analizi yapalım:
Şekil 4.4 Quadcopter’in𝑚 = 2.5 𝑘𝑔 ve𝐹𝑀 = 8𝑁 için tırmanış sırasındaki hız ve ivmesi
32
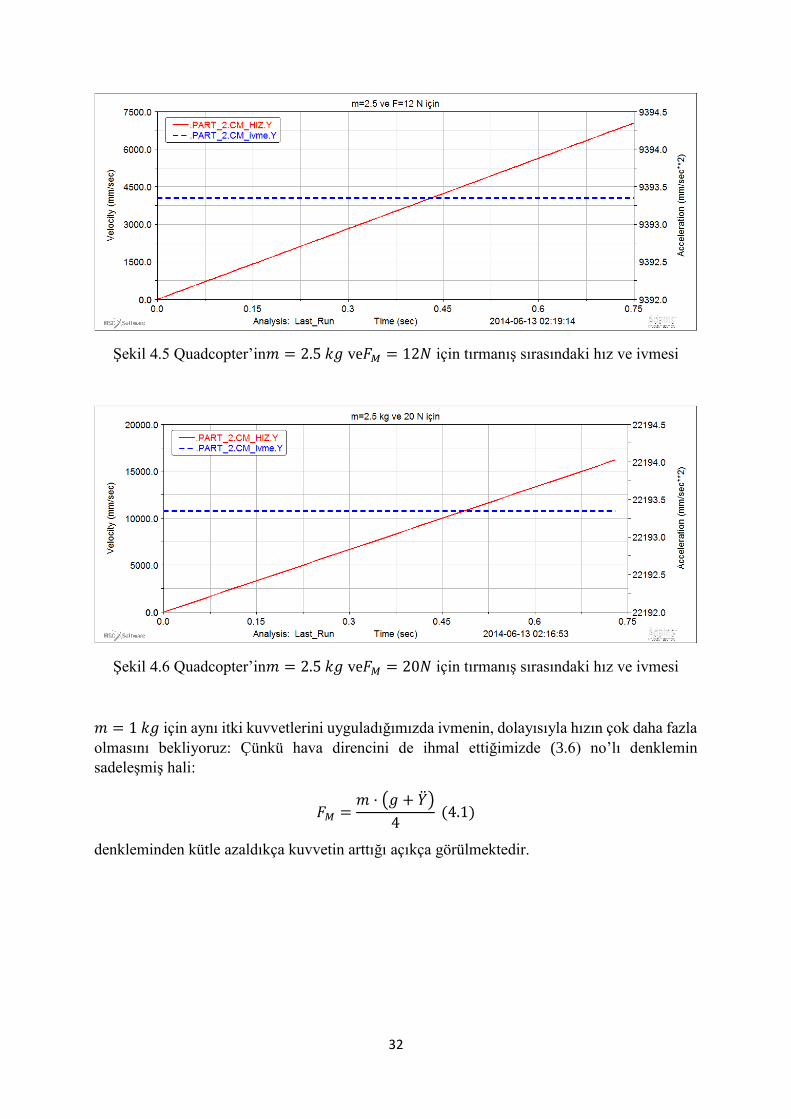
Şekil 4.5 Quadcopter’in𝑚 = 2.5 𝑘𝑔 ve𝐹𝑀 = 12𝑁 için tırmanış sırasındaki hız ve ivmesi
Şekil 4.6 Quadcopter’in𝑚 = 2.5 𝑘𝑔 ve𝐹𝑀 = 20𝑁 için tırmanış sırasındaki hız ve ivmesi
𝑚 = 1 𝑘𝑔 için aynı itki kuvvetlerini uyguladığımızda ivmenin, dolayısıyla hızın çok daha fazla
olmasını bekliyoruz: Çünkü hava direncini de ihmal ettiğimizde (3.6) no’lı denklemin
sadeleşmiş hali:
𝐹𝑀 =𝑚 · (𝑔 + �̈�)
4 (4.1)
denkleminden kütle azaldıkça kuvvetin arttığı açıkça görülmektedir.
33
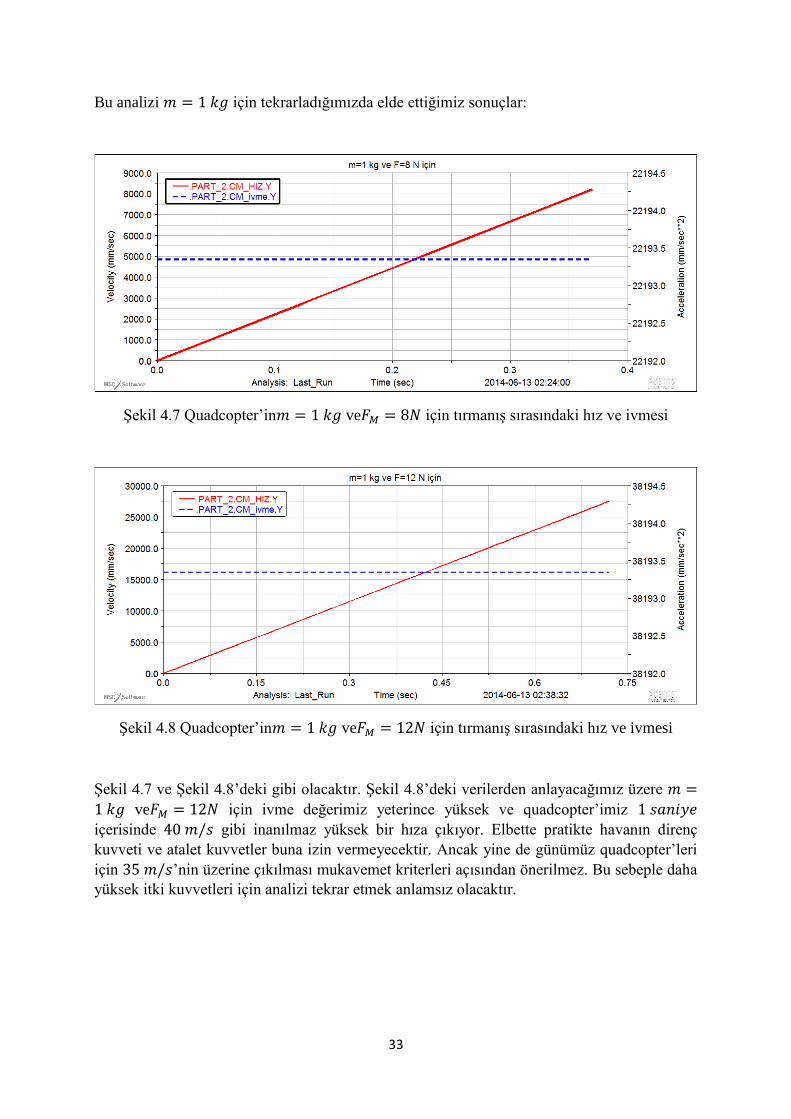
Bu analizi 𝑚 = 1 𝑘𝑔 için tekrarladığımızda elde ettiğimiz sonuçlar:
Şekil 4.7 Quadcopter’in𝑚 = 1 𝑘𝑔 ve𝐹𝑀 = 8𝑁 için tırmanış sırasındaki hız ve ivmesi
Şekil 4.8 Quadcopter’in𝑚 = 1 𝑘𝑔 ve𝐹𝑀 = 12𝑁 için tırmanış sırasındaki hız ve ivmesi
Şekil 4.7 ve Şekil 4.8’deki gibi olacaktır. Şekil 4.8’deki verilerden anlayacağımız üzere 𝑚 =
1 𝑘𝑔 ve𝐹𝑀 = 12𝑁 için ivme değerimiz yeterince yüksek ve quadcopter’imiz 1 𝑠𝑎𝑛𝑖𝑦𝑒
içerisinde 40 𝑚/𝑠 gibi inanılmaz yüksek bir hıza çıkıyor. Elbette pratikte havanın direnç
kuvveti ve atalet kuvvetler buna izin vermeyecektir. Ancak yine de günümüz quadcopter’leri
için 35 𝑚/𝑠’nin üzerine çıkılması mukavemet kriterleri açısından önerilmez. Bu sebeple daha
yüksek itki kuvvetleri için analizi tekrar etmek anlamsız olacaktır.

34
4.2 QUADCOPTER’İN SEYİR HALİNDEKİ DİNAMİK ANALİZİ
Şekil 4.9 Quadcopter’in𝛼 = 10° için MSC ADAMS’daki görünüşü
Bir önceki bölümde quadcopter’in sadece +𝑥 yönünde seyir etmesini istersek:
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼 (4.9)
olmak zorunda olduğunu göstermiştik. O halde α ve 𝑚 değerlerini belirleyip 𝐹𝑀’i buradan
çekebiliriz.
35
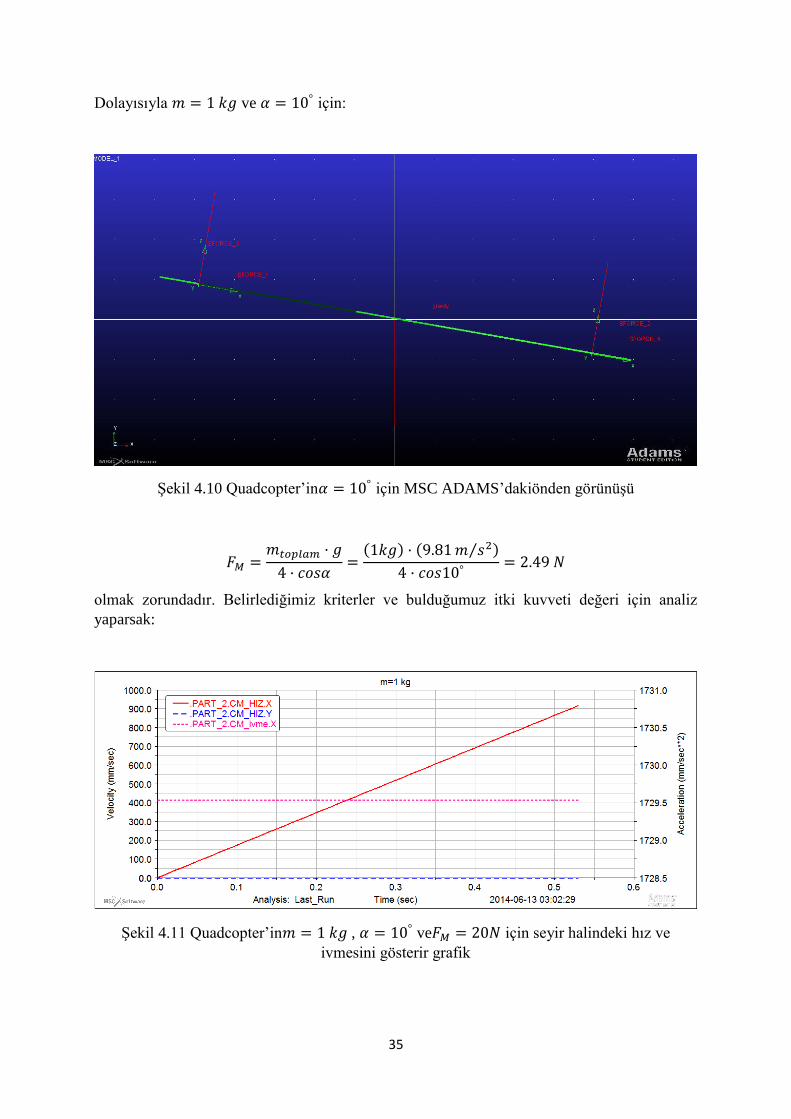
Dolayısıyla 𝑚 = 1 𝑘𝑔 ve 𝛼 = 10° için:
Şekil 4.10 Quadcopter’in𝛼 = 10° için MSC ADAMS’dakiönden görünüşü
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼=
(1𝑘𝑔) · (9.81𝑚 𝑠2⁄ )
4 · 𝑐𝑜𝑠10°= 2.49 𝑁
olmak zorundadır. Belirlediğimiz kriterler ve bulduğumuz itki kuvveti değeri için analiz
yaparsak:
Şekil 4.11 Quadcopter’in𝑚 = 1 𝑘𝑔 , 𝛼 = 10° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve
ivmesini gösterir grafik
36
Şekil 4.11’deki hız ve ivme sonuçlarını elde ederiz. Beklediğimiz gibi +𝑥 yönünde hareketine
sabit ivmeyle devam eden quadcopter’in hızı 𝑦 ekseninde sıfır, yani quadcopter yerden
yükseliğini koruyor.
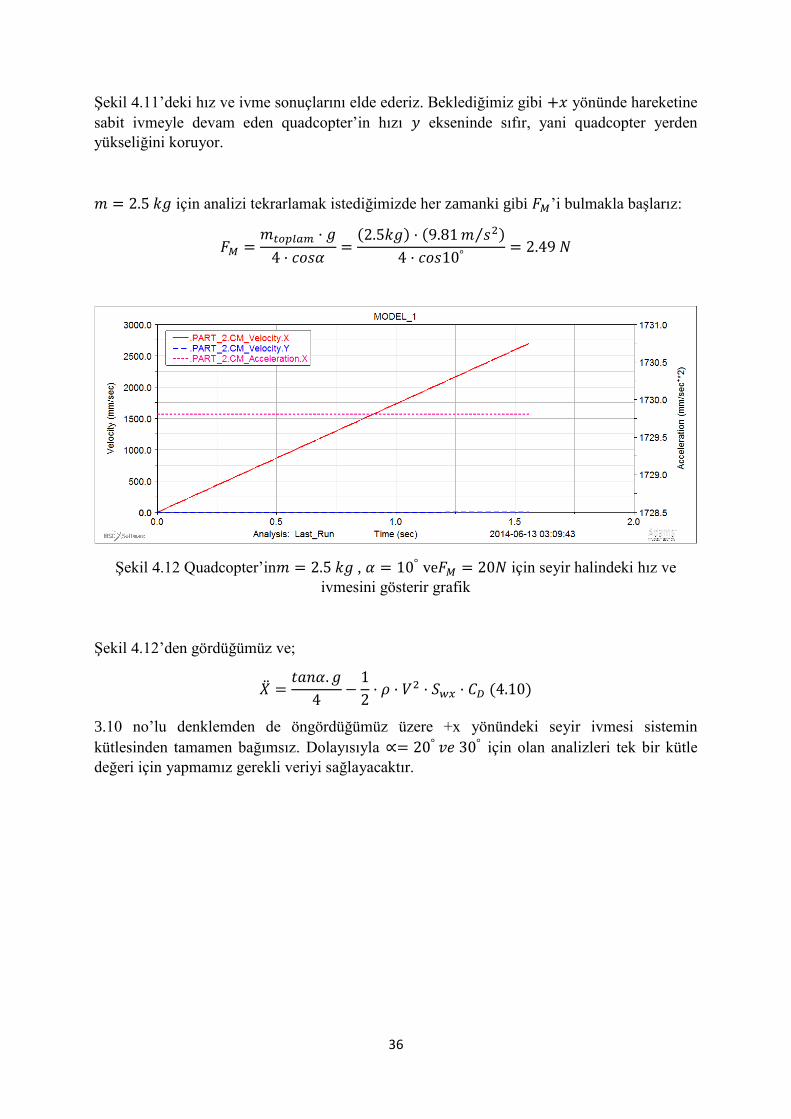
𝑚 = 2.5 𝑘𝑔 için analizi tekrarlamak istediğimizde her zamanki gibi 𝐹𝑀’i bulmakla başlarız:
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼=
(2.5𝑘𝑔) · (9.81𝑚 𝑠2⁄ )
4 · 𝑐𝑜𝑠10°= 2.49 𝑁
Şekil 4.12 Quadcopter’in𝑚 = 2.5 𝑘𝑔 , 𝛼 = 10° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve
ivmesini gösterir grafik
Şekil 4.12’den gördüğümüz ve;
�̈� =𝑡𝑎𝑛𝛼. 𝑔
4−
1
2· 𝜌 · 𝑉2 · 𝑆𝑤𝑥 · 𝐶𝐷 (4.10)
3.10 no’lu denklemden de öngördüğümüz üzere +x yönündeki seyir ivmesi sistemin
kütlesinden tamamen bağımsız. Dolayısıyla ∝= 20° 𝑣𝑒 30° için olan analizleri tek bir kütle
değeri için yapmamız gerekli veriyi sağlayacaktır.
37
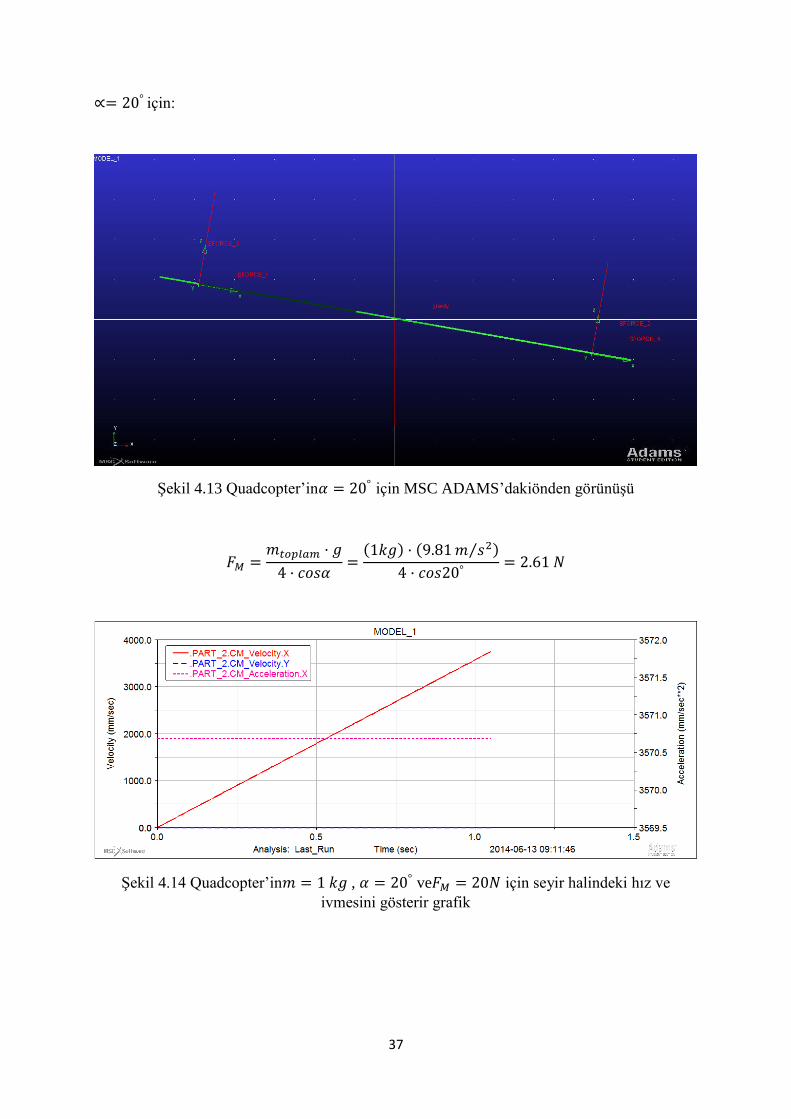
∝= 20° için:
Şekil 4.13 Quadcopter’in𝛼 = 20° için MSC ADAMS’dakiönden görünüşü
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼=
(1𝑘𝑔) · (9.81𝑚 𝑠2⁄ )
4 · 𝑐𝑜𝑠20°= 2.61 𝑁
Şekil 4.14 Quadcopter’in𝑚 = 1 𝑘𝑔 , 𝛼 = 20° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve
ivmesini gösterir grafik
38
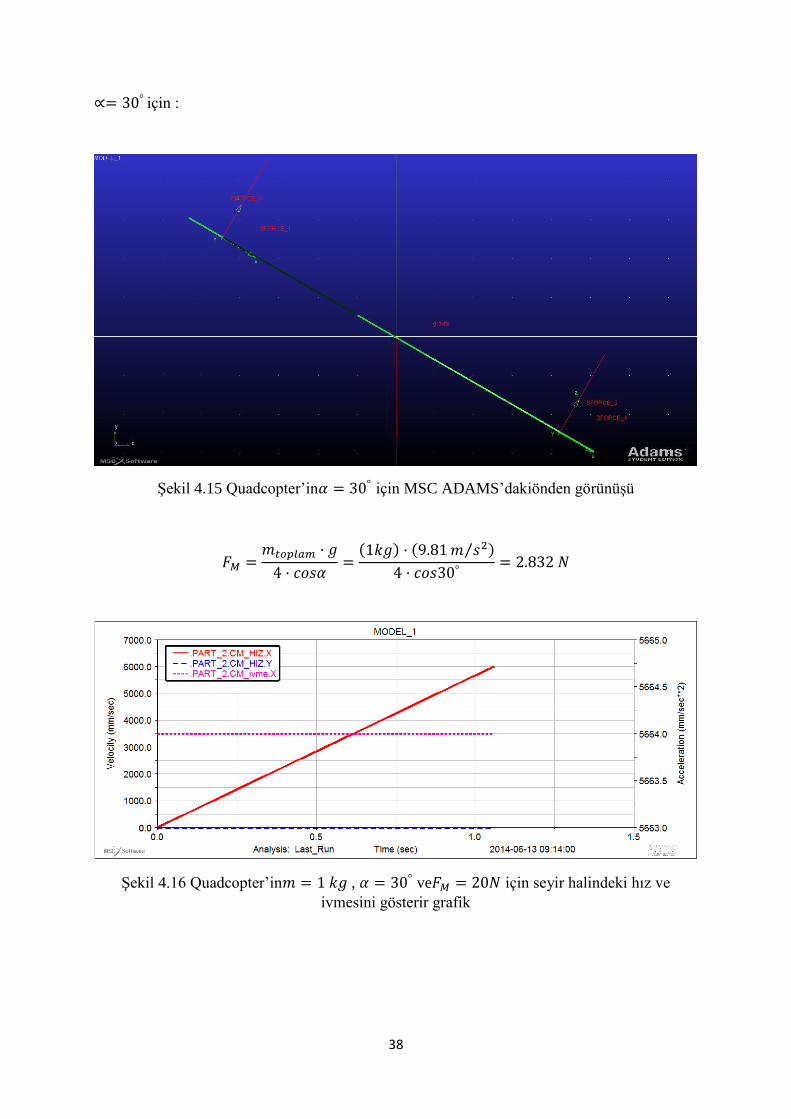
∝= 30° için :
Şekil 4.15 Quadcopter’in𝛼 = 30° için MSC ADAMS’dakiönden görünüşü
𝐹𝑀 =𝑚𝑡𝑜𝑝𝑙𝑎𝑚 · 𝑔
4 · 𝑐𝑜𝑠𝛼=
(1𝑘𝑔) · (9.81𝑚 𝑠2⁄ )
4 · 𝑐𝑜𝑠30°= 2.832 𝑁
Şekil 4.16 Quadcopter’in𝑚 = 1 𝑘𝑔 , 𝛼 = 30° ve𝐹𝑀 = 20𝑁 için seyir halindeki hız ve
ivmesini gösterir grafik
39
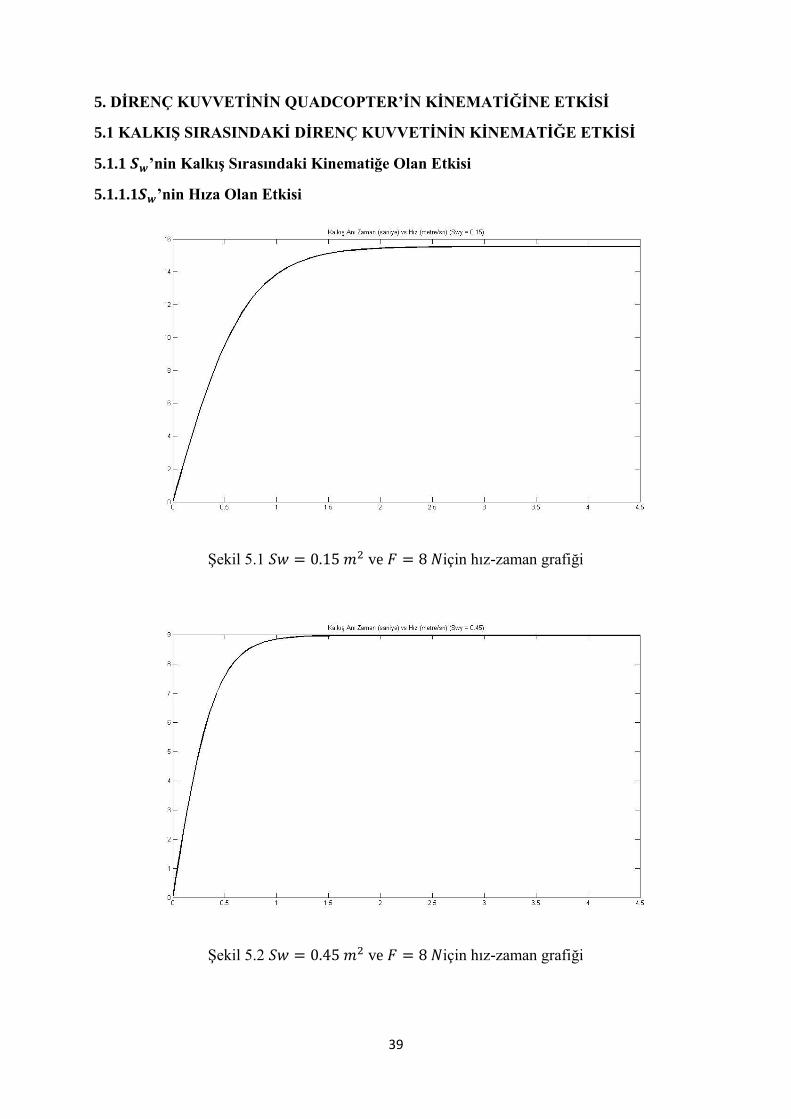
5. DİRENÇ KUVVETİNİN QUADCOPTER’İN KİNEMATİĞİNE ETKİSİ
5.1 KALKIŞ SIRASINDAKİ DİRENÇ KUVVETİNİN KİNEMATİĞE ETKİSİ
5.1.1 𝑺𝒘’nin Kalkış Sırasındaki Kinematiğe Olan Etkisi
5.1.1.1𝑺𝒘’nin Hıza Olan Etkisi
Şekil 5.1 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 8 𝑁için hız-zaman grafiği
Şekil 5.2 𝑆𝑤 = 0.45 𝑚2 ve 𝐹 = 8 𝑁için hız-zaman grafiği
40
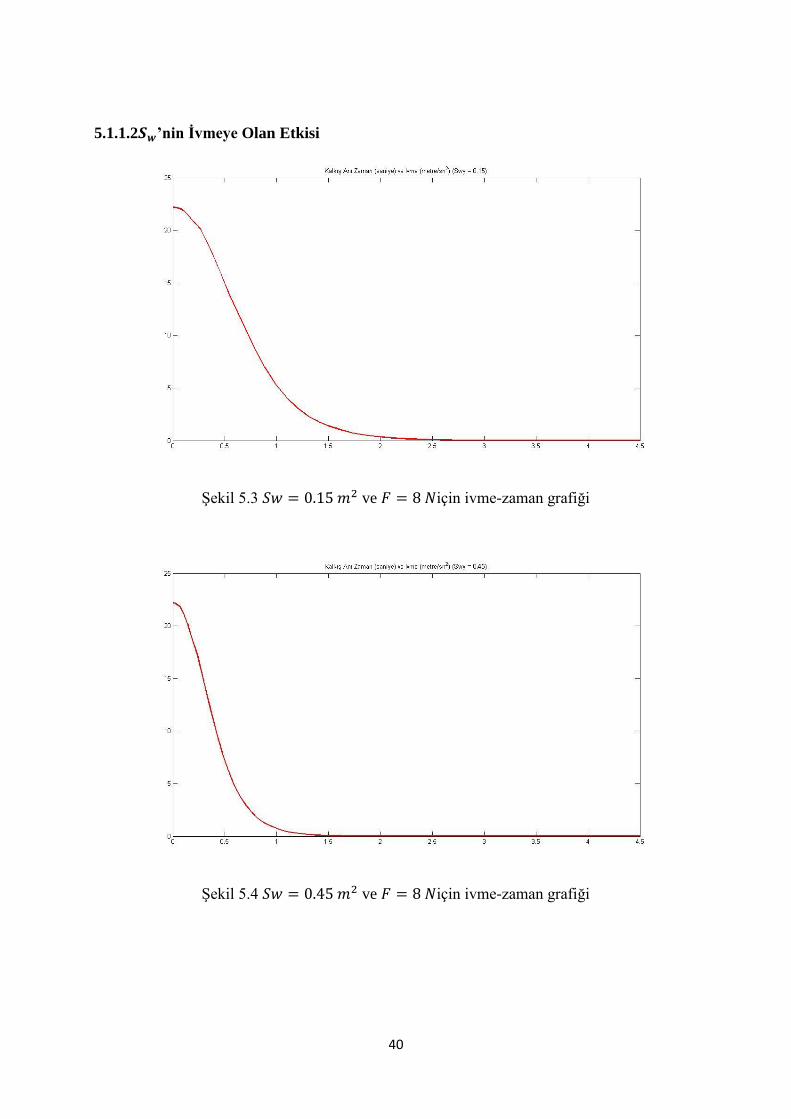
5.1.1.2𝑺𝒘’nin İvmeye Olan Etkisi
Şekil 5.3 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 8 𝑁için ivme-zaman grafiği
Şekil 5.4 𝑆𝑤 = 0.45 𝑚2 ve 𝐹 = 8 𝑁için ivme-zaman grafiği
41
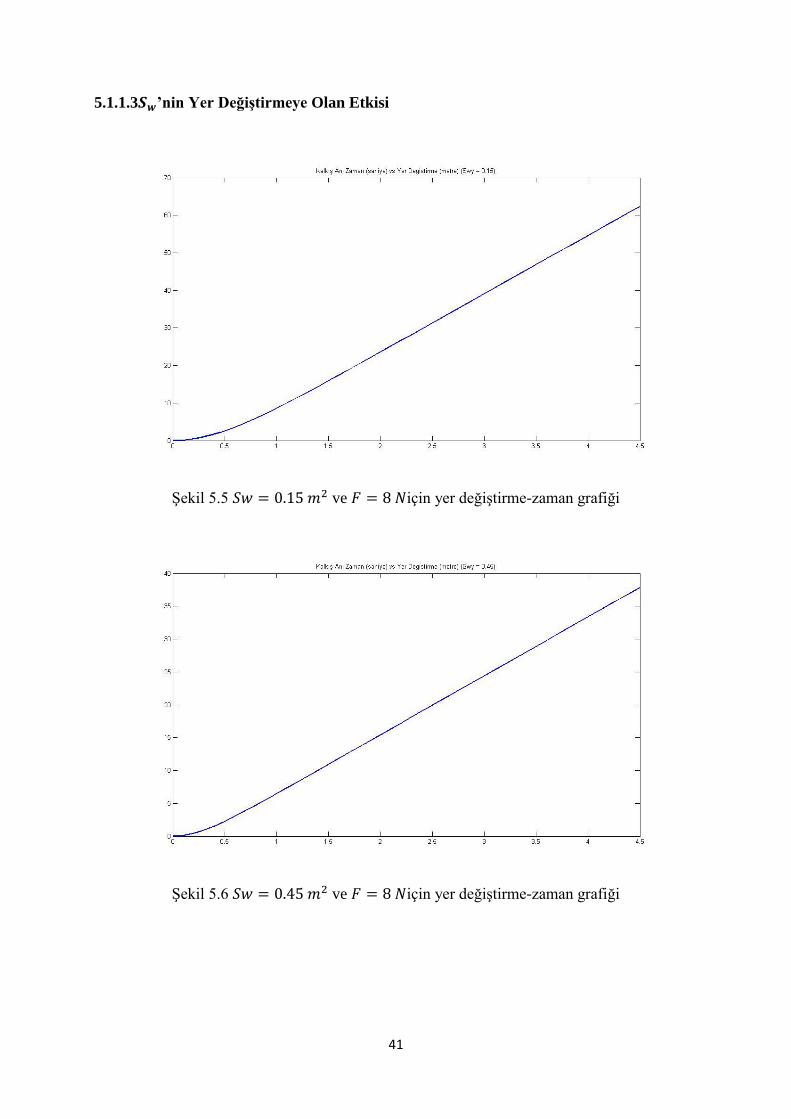
5.1.1.3𝑺𝒘’nin Yer Değiştirmeye Olan Etkisi
Şekil 5.5 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 8 𝑁için yer değiştirme-zaman grafiği
Şekil 5.6 𝑆𝑤 = 0.45 𝑚2 ve 𝐹 = 8 𝑁için yer değiştirme-zaman grafiği
42
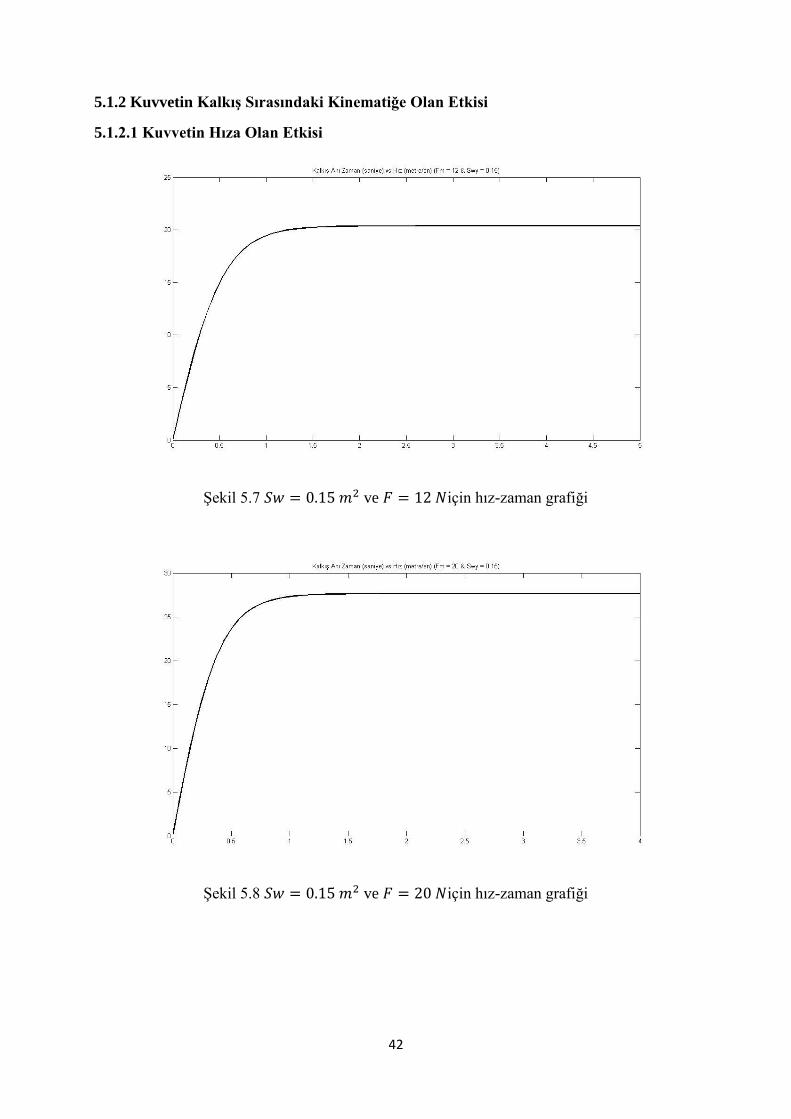
5.1.2 Kuvvetin Kalkış Sırasındaki Kinematiğe Olan Etkisi
5.1.2.1 Kuvvetin Hıza Olan Etkisi
Şekil 5.7 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 12 𝑁için hız-zaman grafiği
Şekil 5.8 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 20 𝑁için hız-zaman grafiği
43
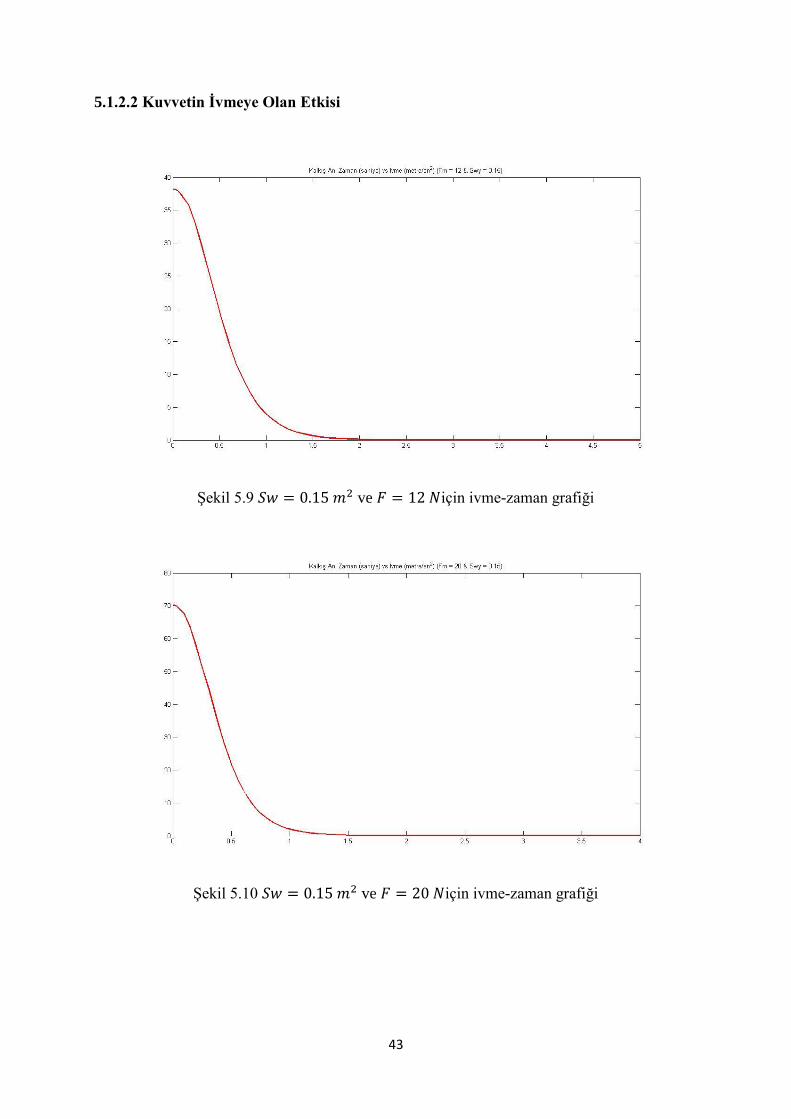
5.1.2.2 Kuvvetin İvmeye Olan Etkisi
Şekil 5.9 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 12 𝑁için ivme-zaman grafiği
Şekil 5.10 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 20 𝑁için ivme-zaman grafiği
44
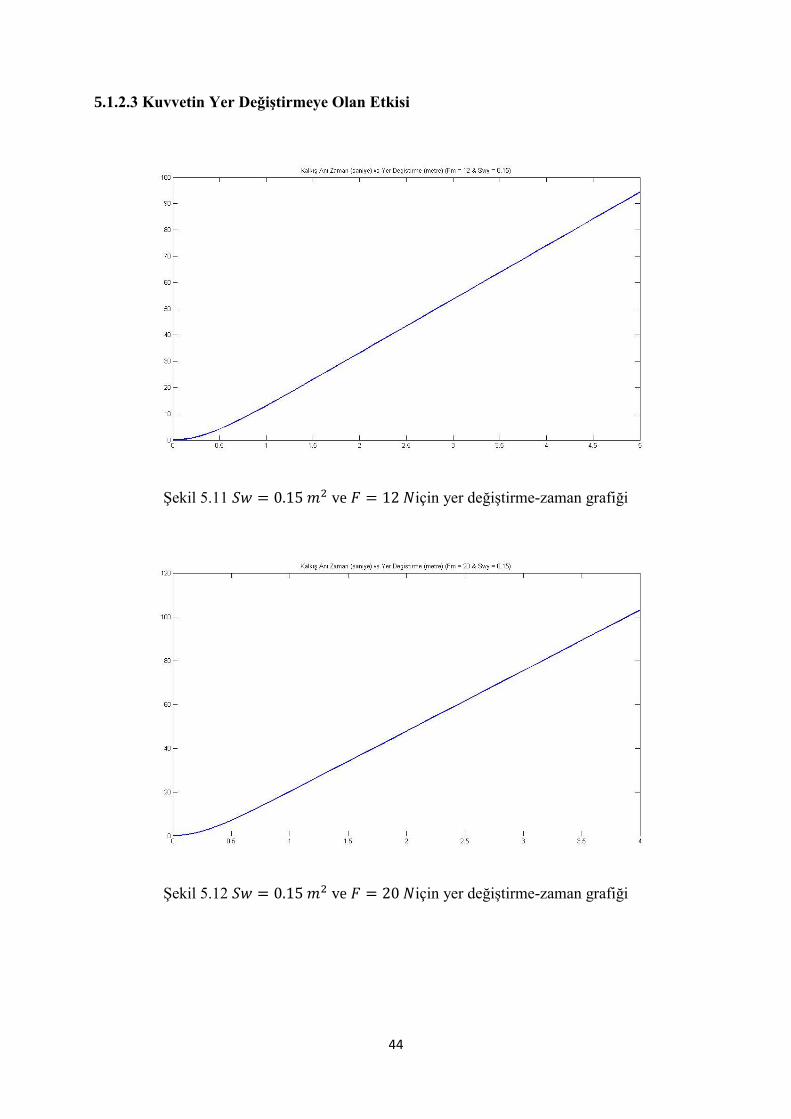
5.1.2.3 Kuvvetin Yer Değiştirmeye Olan Etkisi
Şekil 5.11 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 12 𝑁için yer değiştirme-zaman grafiği
Şekil 5.12 𝑆𝑤 = 0.15 𝑚2 ve 𝐹 = 20 𝑁için yer değiştirme-zaman grafiği

45
5.2 SEYİR SIRASINDAKİ DİRENÇ KUVVETİNİN KİNEMATİĞE ETKİSİ
5.2.1 Değişik Seyir Açılarının Seyir Sırasındaki Kinematiğe Etkisi
5.2.1.1 Hıza Olan Etkisi
Şekil 5.13 𝛼 = 10° için yataydaki hız-zaman grafiği
Şekil 5.14 𝛼 = 10° için düşeydeki hız-zaman grafiği
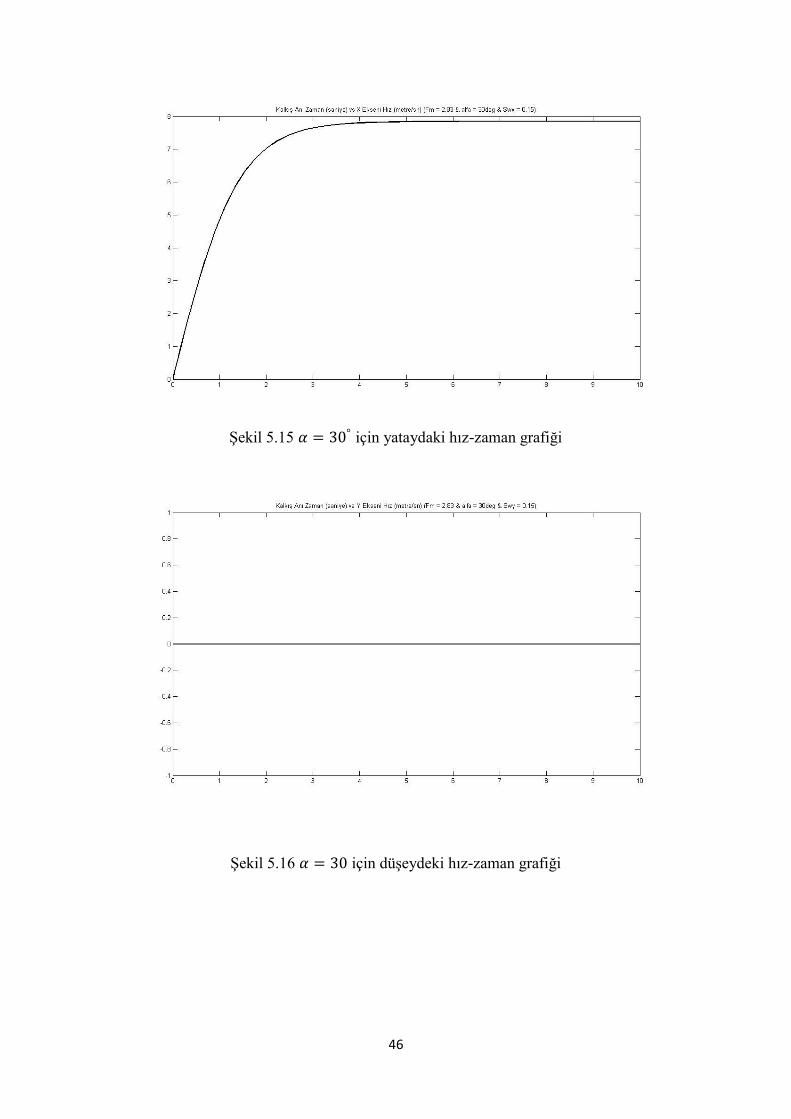
46
Şekil 5.15 𝛼 = 30° için yataydaki hız-zaman grafiği
Şekil 5.16 𝛼 = 30 için düşeydeki hız-zaman grafiği
47
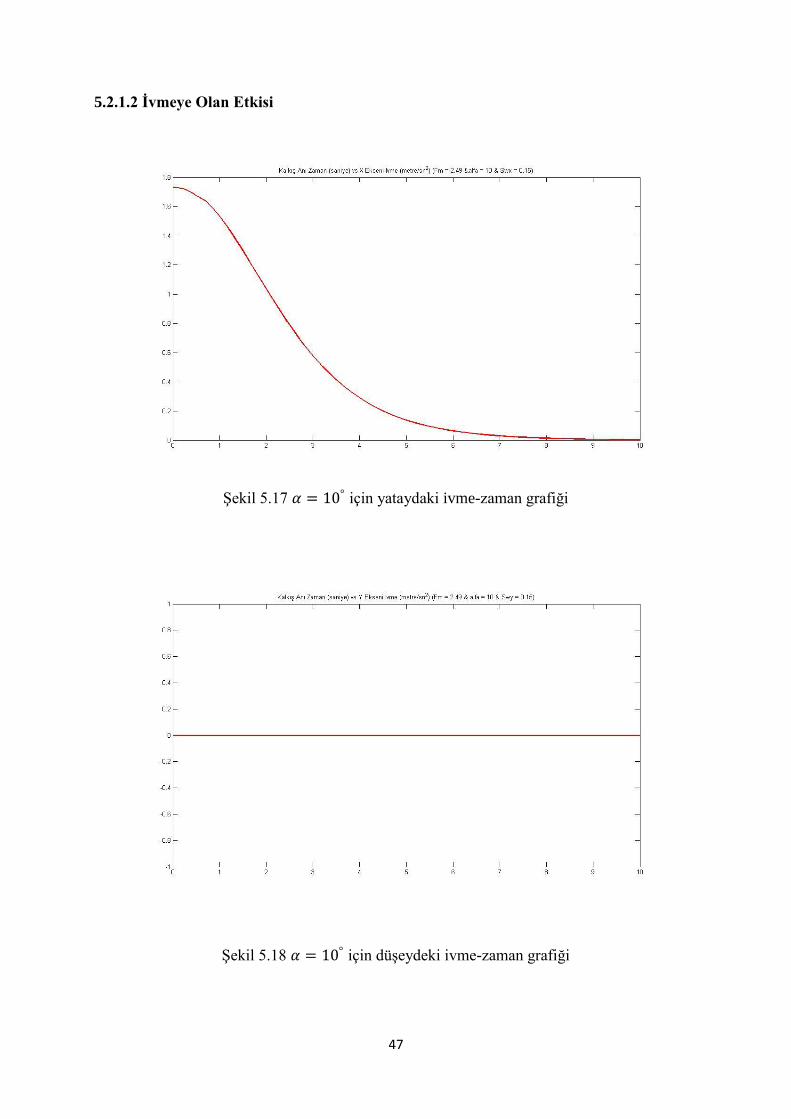
5.2.1.2 İvmeye Olan Etkisi
Şekil 5.17 𝛼 = 10° için yataydaki ivme-zaman grafiği
Şekil 5.18 𝛼 = 10° için düşeydeki ivme-zaman grafiği
48
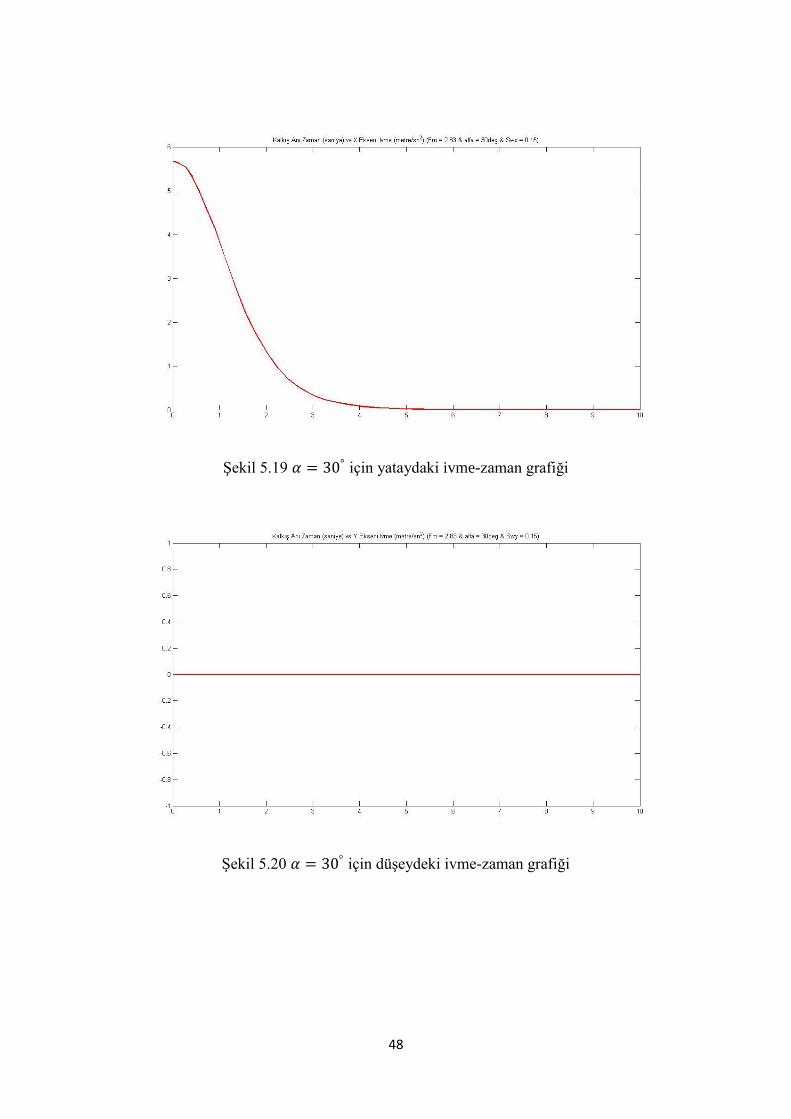
Şekil 5.19 𝛼 = 30° için yataydaki ivme-zaman grafiği
Şekil 5.20 𝛼 = 30° için düşeydeki ivme-zaman grafiği
49
5.2.1.3 Yer Değiştirmeye Olan Etkisi
Şekil 5.21 𝛼 = 10° için yataydaki yer değiştirme-zaman grafiği
Şekil 5.22 𝛼 = 10° için düşeydeki yer değiştirme-zaman grafiği
50
Şekil 5.23 𝛼 = 30° için yataydaki yer değiştirme-zaman grafiği
Şekil 5.24 𝛼 = 30° için düşeydeki yer değiştirme-zaman grafiği
51
6. SONUÇLAR
Quadcopter’in hareketini tırmanış ve seyir olmak üzere iki ana grupta inceleyip çeşitli 𝑚,𝐹 ve
𝛼 değerlerini belirleyip bu değerleri MSC ADAMS’da tasarladığımız model için hız ve ivme
analizleri yaptık. Bu analizleri uzayda ve g çekim ivmesi olan bir ortam için yaptık. Aynı
zamanda bu ortamda rüzgâr gibi dış etkiler ve direnç kuvveti gibi aerodinamik etkiler ihmal
edilmiştir. Bu etkilerden en büyüğü ortalama boyut ve ağırlıktaki quadcopter için direnç kuvveti
olup istenildiği takdirde (3.10) denkleminde gerekli değişkenler yerlerine koyularak analizler
tekrarlanabilir. Ayrıca her iki durum için de quadcopter’in hızının direnç kuvveti ile sınırlı
olduğunu söyleyebiliriz. Yine fizik bilgilerinden bildiğimiz üzere quadcopter’imizin hızı sınır
hızı aşamaz.
Quadcopter’in tırmanışı için yaptığımız analizlerde �̈�’nin(3.6) denkleminden ve Newton
yasalarından da bildiğimiz üzere kütleyle ters orantılı olduğunu gördük. Daha küçük kütlelerde
modeller üretmek quadcopter’in çevikliğini artıyor diyebiliriz. Ancak görece çok hafif ve küçük
modellerde aşırı ivme ve hızın mukavemet kriterleri açısından sıkıntı yaratacağı bilinmektedir.
Yine de olabildiğince küçük kütleli model tasarımları yapmanın quadcopter’in daha az motor
kuvvetine ihtiyaç duyarak aynı ivmeyle tırmanmasını sağlayacağını söylemek mümkün. Bu da
günümüz quadcopter’leri için bu çalışmada incelenmeyen bir diğer problem olan pil süresi
problemine çözüm getirebilir.
Bir diğer analizimiz quadcopter’in çeşitli α açıları için yaptığı seyirlerdeki hız ve ivme
değerleri. Burada (3.10) denkleminden ve yaptığımız analizlerden de göreceğimiz üzere �̈�
ivmesi direnç kuvvetini ihmal etmesek dahi quadcopter’in kütlesine hiçbir şekilde bağlı
değildir. Sadece +𝑥 yönünde hareket etmeyi planlıyorsak mevcut kütle için motorların itki
kuvvetlerinin hesaplanabilir olması ve bunun üzerinde ya da altında kuvvet uygulamamamız
gerekir. Yani quadcopter’imizin sabit bir yükseklikte, yataydaki hızını arttırmamız için
motorların daha fazla itki kuvveti uygulaması olanak dışıdır. Bu sonuç, gelecekte
quadcopter’lerin sabit bir yörüngede hava taşımacılığı yapacağı öngörüldüğünde pil sorunumuz
olmadığı takdirde (güneş enerjili vs.) kütleyi azaltmak için enerji ve zaman kaybetmenin
anlamsız olacağını göstermektedir. Kısacası (3.10) denkleminden ve yaptığımız analizlerden
de açıkça anlaşılacağı üzere quadcopter’imizin yatayda yaptığı hızı arttırmanın tek yolu α
açısını arttırmak ya da her iki durumdaki analizlerimizde ihmal ettiğimiz direnç kuvvetini
azaltmaktır.
Ayrıca her iki analiz için de direnç kuvvetinin etkili olduğunu söyleyebiliriz. Bu bilgi direnç
kuvvetini önemli ve tasarımda öncelik verilmesi gereken bir parametre yapar. Son bölümde
yapılan çözümlemeler çeşitli değişkenlerin direnç kuvveti açısından kinematik olarak önemini
açıkça göstermiş olup quadcopter’inşasesini olabildiğince küçük ve aerodinamik olarak
olabildiğince mükemmel tasarlamamızın oldukça olumlu sonuçlar vereceğini söyleyebiliriz.
Direnç kuvvetini(3.5) denkleminden hareketle hızı azaltarak daazaltabileceğimizi
söyleyebiliriz. Ancak hızı azaltmak amacımıza aykırı olacağından hangi hızda ne kadar direnç
kuvveti etkidiğini tespit etmeli ve bunun hıza olan etkisini iterasyon yaparak optimize bir
çalışma hızı seçmeliyiz. Yine bu denklemdenquadcopter’in seyir hızına dik alanını ve hava
direnç katsayısını azaltarak direnç kuvvetini ve bu kuvvetin hıza olan etkisini olabildiğince
azaltabiliriz.
52
KAYNAKÇA
Bu kılavuzun hazırlanması sırasında yararlanılan başlıca kaynaklar aşağıda verilmiştir.
Metinde, söz konusu kaynaklara doğrudan ya da dolaylı olarak atıfta bulunulmaması yalnızca
pratik nedenlerdir.
[1] Raymond A. Serway, John W. JewettJr.PhysicsforScientistsandEngineers 9th Edition,
Chapter 5, Laws of Motion
[2] Ferdinand P. Beer& E. RussellJohnstonJr. VectorMechanicsforEngineers: Statics 3rd
Edition
[3] http://en.wikipedia.org/wiki/Quadcopter
[4] http://hdl.handle.net/11250/136687
[5] http://www.ted.com/talks/vijay_kumar_robots_that_fly_and_cooperate
[6]
http://www.ted.com/talks/raffaello_d_andrea_the_astounding_athletic_power_of_quadcopters
53
EK-1
functionquadrocopter_kalkis % Kalkış clc clearall
g = 9.81; alfa_D = 0; alfa_R = alfa_D*pi/180;
Fm = 8; m_tot = 1; ro = 1.225; Swy = 0.45; CD = 1;
tstart = 0; tstop = 5;
Init_PV = [0;0]; % [Y_posn; Y_vel] [times,sols] = ode45(@diff_eqn, [tstart,tstop], Init_PV); % Sonuclar Y_Posn = sols(:,1); Y_Velo = sols(:,2);
len = length(Y_Velo); Y_Acce = zeros(len,1); % İvmeyi bul for k = 1: len - 1 Y_Acce(k+1,1) = (Y_Velo(k+1) - Y_Velo(k)) / (times(k+1) - times(k)); end % Grafikleri ciz figure (1) plot(times,Y_Posn,'b-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs Yer Degistirme (metre) (Fm = 8 &Swy =
0.45)') figure (2) plot(times,Y_Velo,'k-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs Hız (metre/sn) (Fm = 8 &Swy = 0.45)') figure (3) plot(times,Y_Acce,'r-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vsIvme (metre/sn^2) (Fm = 8&Swy = 0.45)') % ------------------------- functiondydt = diff_eqn(t,PosVel) % ODE Solver Y_Vel = PosVel(2); FYterm1 = 4*Fm*cos(alfa_R); FYterm2 = (m_tot*0.5*ro*Y_Vel^2*Swy*CD); FYterm3 = (m_tot * g); FYterm4 = (m_tot); Y_Acc = (FYterm1 - FYterm2 - FYterm3)/(FYterm4); dydt = [Y_Vel;Y_Acc]; end end
54
EK-2
functionquadrocopter_seyir
clc clearall
g = 9.81; alfa_D = 30; alfa_R = alfa_D*pi/180;
Fm = 9.81/(4*cos(alfa_R)); m_tot = 1; ro = 1.225; Swx = 0.15; Swy = 0.15; CD = 1;
tstart = 0; tstop = 10;
Init_PV = [0;0;0;0]; % [X_posn; Y_posn; X_vel; Y_vel]
[times,sols] = ode45(@diff_eqn, [tstart,tstop], Init_PV);
% Sonuclar X_Posn = sols(:,1); Y_Posn = sols(:,2); X_Velo = sols(:,3); Y_Velo = sols(:,4);
len = length(Y_Velo); X_Acce = zeros(len,1); Y_Acce = zeros(len,1);
for k = 1: len - 1
X_Acce(k+1,1) = (X_Velo(k+1) - X_Velo(k)) / (times(k+1) - times(k)); Y_Acce(k+1,1) = (Y_Velo(k+1) - Y_Velo(k)) / (times(k+1) - times(k));
end
% Grafikleri ciz figure (1) plot(times,X_Posn,'b-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs X Ekseni Yer Degistirme (metre) (Fm =
2.83 & alfa = 30deg &Swx = 0.15)')
figure (2) plot(times,X_Velo,'k-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs X Ekseni Hız (metre/sn) (Fm = 2.83 &
alfa = 30deg &Swx = 0.15)')
figure (3) plot(times,X_Acce,'r-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs X Ekseni Ivme (metre/sn^2) (Fm = 2.83 &
alfa = 30deg &Swx = 0.15)') % -----------
55
figure (4) plot(times,Y_Posn,'b-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs Y Ekseni Yer Degistirme (metre) (Fm =
2.83 & alfa = 30deg &Swy = 0.15)')
figure (5) plot(times,Y_Velo,'k-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs Y Ekseni Hız (metre/sn) (Fm = 2.83 &
alfa = 30deg &Swy = 0.15)')
figure (6) plot(times,Y_Acce,'r-','LineWidth',2); title('Kalkış Anı Zaman (saniye) vs Y Ekseni Ivme (metre/sn^2) (Fm = 2.83 &
alfa = 30deg &Swy = 0.15)') % ------------------------- functiondydt = diff_eqn(t,PosVel) % ODE Solver X_Vel = PosVel(3); FXterm1 = 4*Fm*sin(alfa_R); FXterm2 = (m_tot*0.5*ro*X_Vel^2*Swx*CD); FXterm3 = 0; FXterm4 = (m_tot);
Y_Vel = PosVel(4); FYterm1 = 4*Fm*cos(alfa_R); FYterm2 = (m_tot*0.5*ro*Y_Vel^2*Swy*CD); FYterm3 = (m_tot * g); FYterm4 = (m_tot);
X_Acc = (FXterm1 - FXterm2 - FXterm3)/(FXterm4); Y_Acc = (FYterm1 - FYterm2 - FYterm3)/(FYterm4);
dydt = [X_Vel; Y_Vel; X_Acc; Y_Acc];
end end
56
BURAK KILIÇ
Mechanical engineering student.
(+90) 536 960 3555
hedonicas@ gmail.com
Citizenship:Turkey
Place of Birth: Istanbul
Date of Birth: 23.03.1989
EDUCATION
2008 – ExpectedSeptember2014 Bulent Ecevit University,
Mechanical EngineeringGPA: 2.28/4.00
2003 – 2007 Gebze Anatolian High School GPA: 74.98/100
RELEVANT EXPERIENCES
2012 A.S.M. Treatment Systems,
5 Weeks SummerIntern
QUALIFICATIONS and SKILLS
Languages
Turkish: Native
English: Advanced
Skills
MS Office
AutoCAD
Solidworks
MSC ADAMS
Licenses
B Class Driver
PADI Advanced Open WaterDiver
CMAS ** Diver
SocialandSportiveActivities
SCUBA Diving
Fencing
Guitar
AKUT
SearchandRescueAssociationMemb
ership
