communications for underwater robotics research platforms
TRANSCRIPT

SysCon 2008 - IEEE International Systems ConferenceMontreal, Canada, April 7-10, 2008
COMMUNICATIONS FOR UNDERWATER ROBOTICS RESEARCHPLATFORMS
Kranthimanoj Nagothu, Student Member IEEE,Matthew Joordens, Member IEEE and Mo Jamshidi, Fellow, IEEE
Autonomous Control Engineering CenterDepartment of Electrical and Computer Engineering
The University of Texas at San AntonioOne UTSA Circle
San Antonio, TX 7824Email: Kranthimanoi.nagothu(?,utsa.edu, matthew.moordens(?&utsa.edu, mojiwacong.org
Abstract - This paper presents a distributed protocol to the oceans and to address the critical problemsfor communication among autonomous underwater faced by the marine community such as underwatervehicles. It is a complementary approach for search/rescue [2], mapping, climate changecoordination between the autonomous underwater assessment, underwater inspection, marine habitatvehicles. This paper mainly describes different monitoring, shallow water mine counter measuresmethods for underwater communication. One of the [3] and scientific studies in deep ocean areas.methods is brute force approach in which messages Recent trends in AUV technology are movingare broadcasted to all the communication nodes, towards reducing the vehicle size and improving itswhich in turn will broadcast the acknowledgement. deployability to reduce the operational costs. ThisIssues relating to this brute force approach are time research aids future operations that involve a fleet ofdelay, number of hops, power consumption, small AUVs become financially and technologicallymessage collision and other practical issues. These feasible. This work can be integrated with the workissues are discussed and solved by proposing a of other AUVs researchers; as a result of which thenew method to improve efficiency of this proposed underwater robots will enable a new class of AUVs,approach and its effectiveness in communication which are capable of gathering scientificamong autonomous underwater vehicles. observations without direct interaction of human
operators and other applications.
1. INTRODUCTION Localization, navigation, and communication arethree primary requirements for AUVs. In getting
Due to extreme difficulty in gathering sub aquatic AUVs to solve problems comprehensively, a keyobservations, very little is known about the oceans issue is communication. In this paper we will addressand their inhabitants. We do know, however that the the communication aspects of autonomousoceans are an extremely complex and an equally underwater vehicles to perform a task cooperatively.important part of the world in which we live. They The next section briefly reviews the problems relatedcover the majority of the planet's surface, influence to underwater acoustic communication and reasonsour climate, host countless species of plants and for choosing Zigbee radio modems for communicationanimals, and are home to important geological between multiple AUVs. Section III describes differentprocesses. Since they are notoriously difficult to methods for communication using Zigbee radiostudy, they present one of the final frontiers for modems. Section IV describes our approach inexploration. Since the underwater environment is designing the new method in order to improvevery dark and musky much of its biology and efficiency of this proposed approach and itsgeology must be studied at very close range. At effectiveness in communication among multiplegreater distances, even powerful lights fail to AUVs.illuminate a scene sufficiently. The goal of ourresearch is to improve underwater robot technologyin order to enable more scientific exploration of the 11. BACKGROUNDoceans.
Underwater communication can be implemented inAutonomous underwater vehicles (AUVs) are numerous ways including acoustic propagation [4],unmanned, untethered, self-propelled platforms [1]. fiber-optic communication, and radio modems.AUVs have the potential to revolutionize our access Acoustic propagation faces a lot of problems
978-1-4244-2150-3/08/$25.00 ©)2008 IEEE
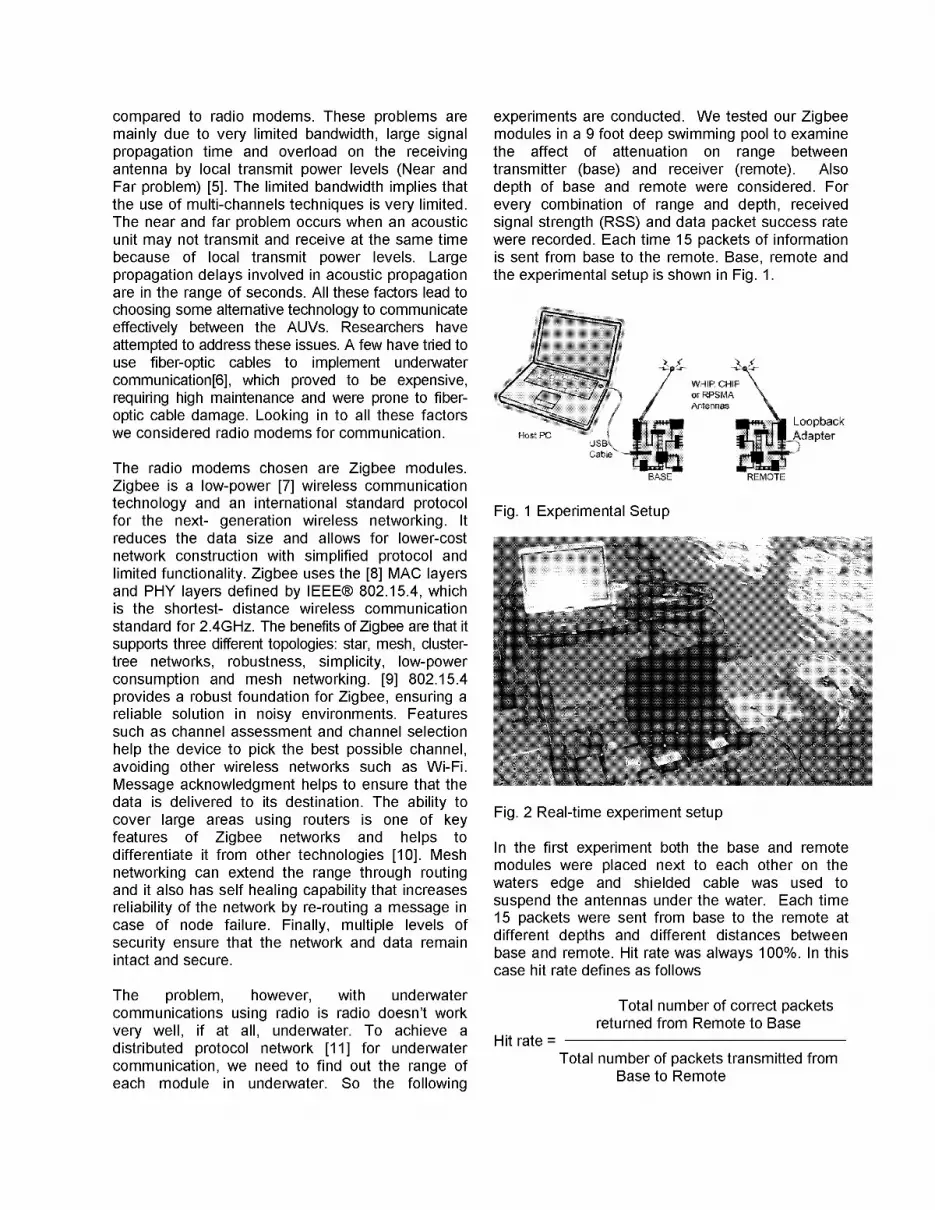
compared to radio modems. These problems are experiments are conducted. We tested our Zigbeemainly due to very limited bandwidth, large signal modules in a 9 foot deep swimming pool to examinepropagation time and overload on the receiving the affect of attenuation on range betweenantenna by local transmit power levels (Near and transmitter (base) and receiver (remote). AlsoFar problem) [5]. The limited bandwidth implies that depth of base and remote were considered. Forthe use of multi-channels techniques is very limited. every combination of range and depth, receivedThe near and far problem occurs when an acoustic signal strength (RSS) and data packet success rateunit may not transmit and receive at the same time were recorded. Each time 15 packets of informationbecause of local transmit power levels. Large is sent from base to the remote. Base, remote andpropagation delays involved in acoustic propagation the experimental setup is shown in Fig. 1.are in the range of seconds. All these factors lead tochoosing some alternative technology to communicateeffectively between the AUVs. Researchers haveattempted to address these issues. A few have tried touse fiber-optic cables to implement underwatercommunication[6], which proved to be expensive, WHP,CHIPrequiring high maintenance and were prone to fiber- orRPSMAoptic cable damage. Looking in to all these factors Loopbackwe considered radio modems for communication. Host PG USB Adapter
The radio modems chosen are Zigbee modules. BASEBASE ~REMOTEZigbee is a low-power [7] wireless communicationtechnology and an international standard protocol Fig. I Experimental Setupfor the next- generation wireless networking. Itreduces the data size and allows for lower-costnetwork construction with simplified protocol andlimited functionality. Zigbee uses the [8] MAC layersand PHY layers defined by IEEE® 802.15.4, whichis the shortest- distance wireless communicationstandard for 2.4GHz. The benefits of Zigbee are that itosupports three different topologies: star, mesh, cluster-tree networks, robustness, simplicity, low-powerconsumption and mesh networking. [9] 802.15.4provides a robust foundation for Zigbee, ensuring areliable solution in noisy environments. Featuressuch as channel assessment and channel selectionhelp the device to pick the best possible channel,avoiding other wireless networks such as Wi-Fi.Message acknowledgment helps to ensure that thedata is delivered to its destination. The ability to Fcover large areas using routers is one of key g2 Reltm e rmensetupfeatures of Zigbee networks and helps tofom te asedifferentiate it from other technologies [10]. Mesh Indthefirs perimentbo thebae n tenetworking can extend the range through routing m lers were anced feldeto reashuthedtonand it also has self healing capability that increasesfwgasele clereliability of the network by re-routing a message in suspend the antennas under the water. Each timecase of node failure. Finally, multiple levels of 15 packets were sent from base to the remote atsecurity ensure that the network and data remain different depths and different distances betweenintact and secure. base and remote. Hit rate was always 100%. In this
case hit rate defines as followsThe problem, however, with underwater Total number of correct packetscommunications using radio is radio doesn't work retu---rned from Reot toBaseIr
E Depth(feet)
to-40 6 ft
0)
From........ this
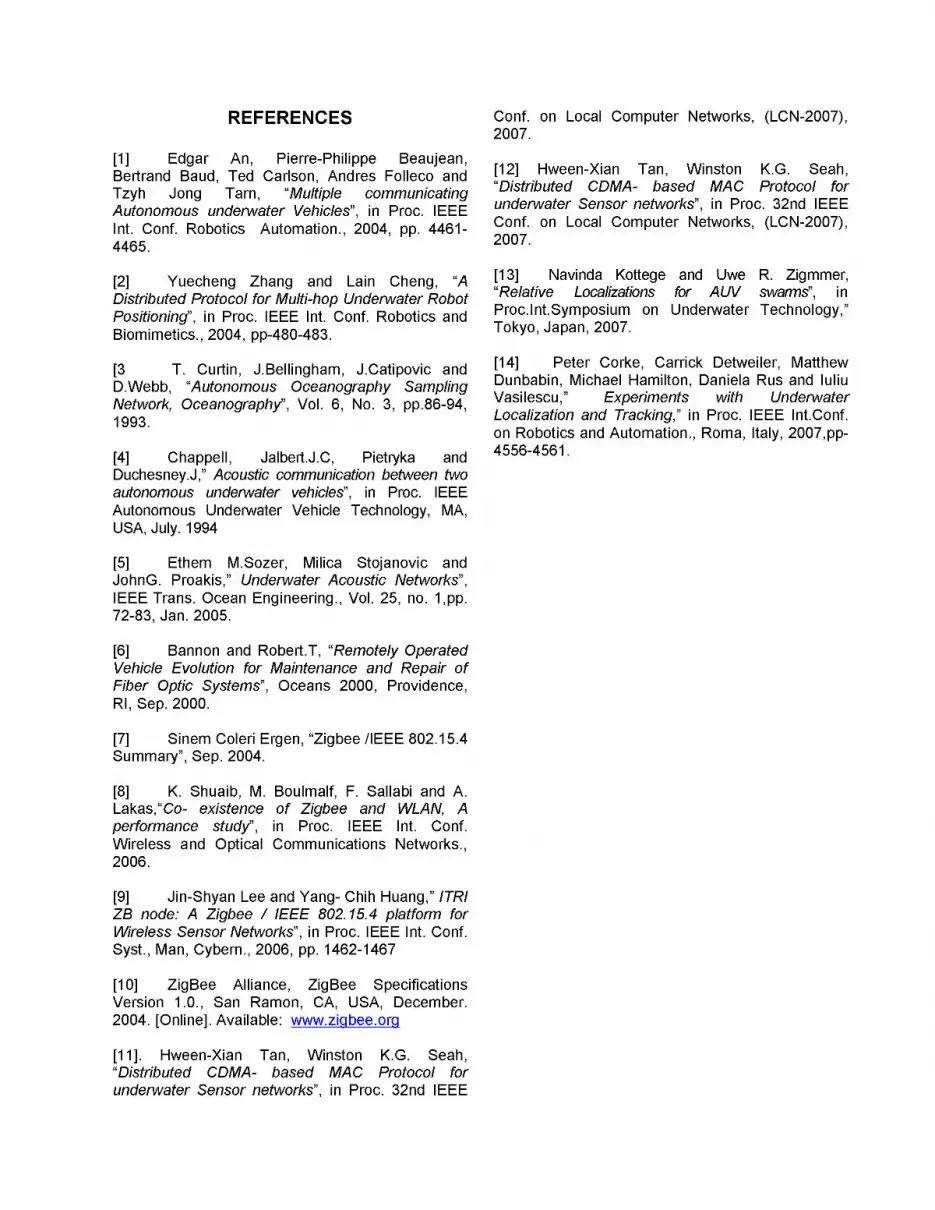
Fig.3eArangemnsoandrmtennaOsringswimin plceivedf
signal strengths at different levels at certain stage, F. eutwe can approximate the distance between the ilg 5 eutfrom experiment 2modules. This approximation helps us to find out theapproximate distance between AUVs and acts as a The experiment was the repeated, ensuring that thesecondary localization system. Results of the modules were shielded with aluminium foil. Eachexperiment are shown in Fig. 4. time 15 packets are sent from base to the remote at
different depths and different distances betweenFrom Fig. 4 we can analyze that at 7ft depth, when base and remote. Hit rate was always 100%.the distance between modules is l3ft and modules Results of this experiment are shown in Fig. 5. Fromthe received signal strength is -68dBm (dBm is a Fig. 5 we can infer that received signal strengthstandard for measuring levels of power in relation to decreases as the depth and distance between basea 1 milliwatt reference signal) At gft depth, when and remote increases. Combining these twothe distance between modules is 1l3ft and experiments these results were plotted in Fig.6unshielded with aluminum foils the received signal comparing these two experiments, it can be inferredstrength is -63dBm. Actually the received signal that the received signal strength did decrease oncestrength should decreases, but in this case it is all; the equipment above water was shielded. Theincreasing. Analysis of received signal strength experimental resulted in finding out the range ofappeared too optimistic and it is considered that the modules and to achieve a distributed protocolmodules themselves, being unshielded, may have network for underwater communication. Once theemitted enough radio waves to communicate above distributed protocol network is achieved, our nextthe water. So the modules should always be goal is to identify different methods ofshielded to avoid radiation and reduce the affect of communication using Zigbee radio modems In orderattenuation on the signal to solve problem comprehensively.
f -. 0 .
|~~~~~~~~~~~~~~~~~~~~~~~~~~~~~............. E1 Depth( (fe_e_
-30 ___ -60 -aftS
-40Yf m -8ftS80 O~~~~~~~~~~~~~~~~ -40 4 ftNSDistance~ ~ ~ ~ U betee moue(et6 ftNS
- 60............7...Fi.4Rslsfoxeiet1t-100 9ftNSDistance~~~~~~~~~~~~~~~~~~isacbetween mModules(fteet)N
..-120....9 ftW
Fig. 6 Comparison between experiment 1 andexperiment 2(NS=unshielded, S=shielded).

III Different methods of Communications receives a packet it first verifies that its identificationUsing Zigbee Radio Modems number matches the packet identification number.
If so, it stores the packet in the memory and in turnIn this paper, two different types of underwater broadcasts an acknowledgement else it transmitscommunication using Zigbee radio modems for AUV the packet to neighbouring nodes. If the nodeare discussed. One of the approaches is brute force receives the same packet from another nodeapproach. Let us consider the following scenario simultaneously, it automatically ignores the secondfrom Fig.7. packet, and after certain period of time, it accepts
the next packet.
Underwater------------------------ ~Example for Bruteforce Approach:Underwater
( A ---- 1) A node broadcasts packets to its neighbours-____________------- ----------------------------------------------------------------------- (B&C).
--------------------------------------------------------------K ----------------------------- 2) B and C receive packet from A and afterthe-------------------------------------------------------------- ----------------------------- verification process iscompleted,basedonthe------- ------------------------------------------------------------------------------------ result, it either stores in memory or sendpacketsto------- ------------------------------------------------------------------------------------ neighbours (in this B and C send packetstoD).
---------------------------------------------------- ----------------------------------------- 3) D will accept only one packeteitherfromBorC----------------------------------------------------)--------------------------------------- and ignores the other packet. Aftertheverification,
process is completed based on the result it either------------------------------------------------------------------------------------ ------- stores in memory or sendpacketstoEandF.
4) E and F receives packet from D and afterprocess of the verification is completed, based onthe result it either stores in memory or send packetsto G.
5) G will accept only one packet either from E or Fand ignores the other packet. After verificationprocess is completed, based on the result it eitherstores in memory and the acknowledgment is sentback to E or F.
------------------------------------------------------------------------------6)--Repeat-----the----steps Repuntilhe stall unthe alpacketsacketsareettransmitted to the respective destinations.
Fig. 7 Brute force approach Finally the packet reaches destination node G. Thisapproach requires at least 8 hops to receive apacket from source (A) to destination (G). As the
In this case, let us consider small circles number of hops increases, the time delay increasesrepresenting nodes that are present in AUVs. We and power consumption also increases. Messageneed to communicate among AUVs to solve a collision is the most important factor to beproblem. A node needs to send some information to considered in this approach, because it leads toG node. In the brute force approach only one packet loss. This is an issue because retrieving themaster is allowed (in this case A is the master). The packet again utilizes lot of resources. The othermaster allows one packet of information to circulate practical issues of this approach are load on theat any time between all the other nodes. Every node, utilization of resources like memory, batterynode has a unique identification number, and every and bandwidth are high. Taking all these issues it ispacket has a unique identification number concluded that, the proposed method helps to solvecorresponding to its destination (In this case the the issues and improve efficiency of the approachpacket identification number is destination G and its effectiveness in communication betweenidentification number). Each time that a node autonomous underwater vehicles.

IV. PROPOSED APPROACH 7) Reliable path is decided based on the result ofstep 6.
In the proposed approach we assume the positionof each robot is known by existing localization 8) Each time a node acknowledge to master node ittechniques [13] - [14]. The position of robot is given also updates its position. Based on this, the masterin the form of (X-axis, Y-axis, and Z-axis). Consider node verifies if there is any change in the position ofthe scenario in Fig. 5. In this case we consider the nodesthese small circles representing nodes that arehe .present in AUVs. We need to communicate among 9) If there Is any change In the position of nodes, goAUVs. A node should send some information to G to step 1node to establish communication. In this approachposition of the robot is also included with the 10) If there is no change in the position of the nodesacknowledgment. Every node has also a unique use the existing path to send all the packets.identification number, and every packet has uniqueidentification number corresponding to itsdestination (In this case the packet identification Finally, the packet reaches destination node G. Thisnumber is destination G identification number). approach requires at least 4 hops to receive aEach time a node receives a packet, it first verifies packet from source (A) to destination (G). As thethat its identification number matches the packet numberof hops decrease, thetimedelay and poweridentification number. If so it stores the packet in the consumption also decrease. The result shows thatmemory and in turn broadcasts an the proposed approach reduces 50% of resourceacknowledgement, else transmits the packet to utilization. This proposed approach has a lowerneighbouring nodes. In the proposed approach chance of message collision compared to the brutemaster can be switched in case of failure in the force approach. If there is any chance of messagesystem (in this case A is the master node). collision, it will utilize only 50% resources to retrieve
the packet back to the node. All of the issues ofbrute force approach are discussed and solved by
Algorithm for proposed Approach coming up with a new method to improve practicalityof this approach and its effectiveness in
1) Determine the position of all the existing nodes communication between autonomous underwaterusing the broadcasting method. In broadcasting vehicles.method the master node send packets to all otherthe nodes. It receives back the acknowledgment V CONCLUSIONfrom other nodes with their respective positions.
2) The shortest paths are calculated between the In this paper, we have investigated the problemsmaster node and destination node. The shortest related to underwater acoustic communication,paths refer to that with the fewer hops from the fiber-optic underwater communication and providedmaster node to the destination node. an innovative solution of using radio modems and
developing a distributed protocol for underwater3) If there are two or more shortest paths, the most communication. We also have investigated thereliable path is chosen from the shortest paths. problems in different methods of communications
using Zigbee modems and provided a novel4) Reliable path Is calculated based on the physical approach to effectively communicating among thedistances between the nodes. small fleet of AUVs to solve a problem
5) Select the largest physical hop distance from cooperatively. To the best of our knowledge, there5)Seachsrthes parsth. The gsil phodistane fropis has been few directed research with regards to theeach shortest path. The largest physical hop usage of Zigbee radio modems and thecalculated using the following distance formula. development of distributed protocol for underwater
Distance communication. The proposed approach is verygeneric in nature and can be applied to any type ofFormula= J(xa-Xb)A2+(ya -yb)A2+ (Za -Zb)A2 radio modems.
6) When comparing the largest hops from eachshortest path, the smallest of largest hop is chosen.
REFERENCES Conf. on Local Computer Networks, (LCN-2007),2007.
[1] Edgar An, Pierre-Philippe BeaujeanBertrand Baud, Ted Carlson, Andres Folleco and [12] Hween-Xian Tan, Winston K.G. Seah,BTrand Baud, TedCarlson,Multipes Fom icaind "Distributed CDMA- based MAC Protocol forTzyh Jong Tarn, "Multiple communicating underwater Sensor networks", in Proc. 32nd IEEEAutonomous underwater Vehicles", in Proc. IEEE onderwater ompnsorn etworks 32007EEInt. Conf. Robotics Automation., 2004, pp. 4461- Conf. on Local Computer Networks, (LCN-2007),4465. 2007.
[2] Yuecheng Zhang and Lain Cheng, "A [13] Navinda Kottege and Uwe R. Zigmmer,Distributed Protocol for Multi-hop Underwater Robot "Relative Localizations for AUV swarms", inPositioning", in Proc. IEEE Int. Conf. Robotics and Proc. Int.Symposium on Underwater Technology,"Biomimetics., 2004, pp-480-483. Tokyo, Japan, 2007.
[3 T. Curtin, J.Bellingham, J.Catipovic and [14] Peter Corke, Carrick Detweiler, MatthewD.Webb, "Autonomous Oceanography Sampling Dunbabin, Michael Hamilton, Daniela Rus and luliuNetwork, Oceanography', Vol. 6, No. 3, pp.86-94, Vasilescu," Experiments with Underwater1993. Localization and Tracking," in Proc. IEEE Int.Conf.
on Robotics and Automation., Roma, Italy, 2007,pp-[4] Chappell, Jalbert.J.C, Pietryka and 4556-4561.Duchesney.J," Acoustic communication between twoautonomous underwater vehicles", in Proc. IEEEAutonomous Underwater Vehicle Technology, MA,USA, July. 1994
[5] Ethem M.Sozer, Milica Stojanovic andJohnG. Proakis," Underwater Acoustic Networks",IEEE Trans. Ocean Engineering., Vol. 25, no. 1,pp.72-83, Jan. 2005.
[6] Bannon and Robert.T, "Remotely OperatedVehicle Evolution for Maintenance and Repair ofFiber Optic Systems", Oceans 2000, Providence,RI, Sep. 2000.
[7] Sinem Coleri Ergen, "Zigbee /IEEE 802.15.4Summary", Sep. 2004.
[8] K. Shuaib, M. Boulmalf, F. Sallabi and A.Lakas," Co- existence of Zigbee and WLAN, Aperformance study', in Proc. IEEE Int. Conf.Wireless and Optical Communications Networks.,2006.
[9] Jin-Shyan Lee and Yang- Chih Huang," ITRIZB node: A Zigbee / IEEE 802.15.4 platform forWireless Sensor Networks", in Proc. IEEE Int. Conf.Syst., Man, Cybern., 2006, pp. 1462-1467
[10] ZigBee Alliance, ZigBee SpecificationsVersion 1.0., San Ramon, CA, USA, December.')rnrA rnr-%H-%,1 A *In hlnk n *LAAA *7f ^r2004. [Online].Aval,able:w.~ b&r
[11]. Hween-Xian Tan, Winston K.G. Seah,"Distributed CDMA- based MAC Protocol forunderwater Sensor networks", in Proc. 32nd IEEE