w-3 dyskretne - pracownia sterowania i optymalizacji, kam, … · web view2007-10-05 ·...
TRANSCRIPT

W-3 Dyskretne
Transformatory wybranych ciągów:
delta Kroneckera tzn.
operator przesunięcia opóźnienia o k w czasie z własności o opóźnieniami
ciągu liczbowego
dyskretny skok jednostki tzn.
funkcja wielomianowa a – liczba, n = 0, 1, 2, 3, ...
W szczególności:
oraz
Jeszcze raz przykłady;
Przykład 1.
Znaleźć dyskretny oryginał (czyli ciąg liczbowy) funkcji o transformace Z równej:
(zrobić sami)
Przykład 2.
Parę wyrazów tego ciągu:
Obliczenie w MATLABie:

Potraktujemy obliczenia jako odpowiedź systemu dyskretnego o transmitancji Y(z) na -
Kroneckera, która jak wiadomo .
num = [1 20];
den = [1 21];
x = [1 zeros (1 30)]; % wprowadzenie na wejście delty Kroneckerak = 0 : 30;
wyspecyfikowana oś czasu
y = filter (num, den, x);
plot (k, y, ’ro’);
grid
Przypomnijmy:
z l. r. różnic. i reguły o ciągach opóźnionych
+ WP = 0 o założenie, że
otrzymamy:
a WP wynoszą:
Stąd:
Czyli rozwiązanie l. r. różnic. z dodatkowymi założeniami: oraz WP = 0 prowadzi do
dyskretnej transmitancji operatorowej:
Możemy to przedstawić jako:
n
nx
nx
30

K(s)T
Jest to abstrakcja matematyczna powstała w wyniku ’zabiegu próbkowania’:
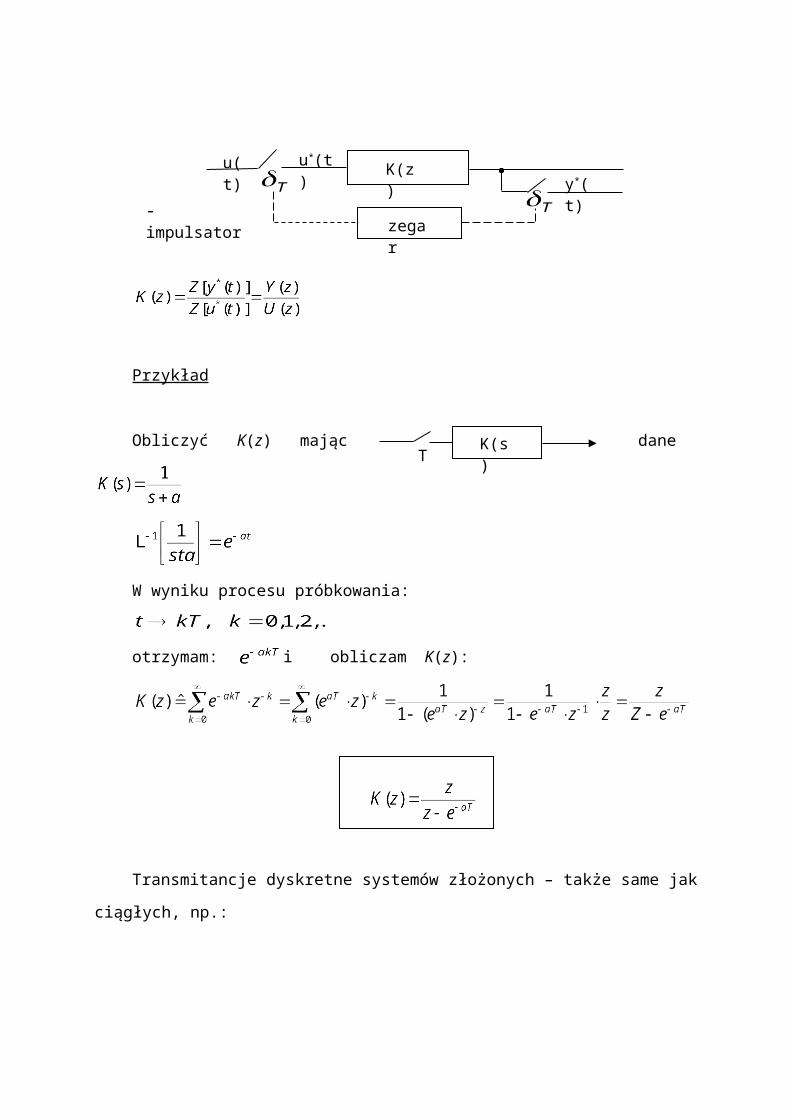
Przykład
Obliczyć K(z) mając dane
W wyniku procesu próbkowania:
otrzymam: i obliczam K(z):
Transmitancje dyskretne systemów złożonych – także same jak ciągłych, np.:
)(ˆ}{ zuun }{ˆ)( nyzY )()()(zMzLzK
zegar
K(z)u(t) u*(t)y*(t)T
T- impulsator
Transmitancja widmowa
Def. Transmitancja widmową nazywamy następującą funkcję argumentu co;
Z uwagi na wzór Eulera: transmitancja widmowa jest funkcją okresowo o
okresie np.
Odpowiedź na standardowe pobudzenia:
Odpowiedź impulsowa – odpowiedź na pobudzenie impulsem dyskretnym
Wł. przyjmujemy, że
{ }
Np. system dyskretny o transmitancji ma odpowiedź impulsową
Odpowiedź skokowa – jest to reakcja systemu na pobudzenie dyskretnym skokiem
jednostkowym (dla WP = 0) i wynosi:
{yn}
}{ n
}{ nK(z)
{yn}
Im K(ej)
Re K(ej)

gdzie .
Stabilność systemów dyskretnych
Przypomnijmy;
System dyskretny (liniowy) ma transmitancję dyskretną:
,
przy założeniu (żeby nie było zerowego bieguna)
(żeby ustalić rząd transmitancji)
oraz WP = y-1, y-2, ... , y-m = 0.
Przez z1, z2, ... , zm oznaczymy pierwiastki jego wielomianu charakterystycznego (czyli bieguny
transmitancji):
DEF. Jeśli, przy zerowym pobudzeniu i każdym WP , to dyskretny system
nazywamy stabilnym.
(”niepraktyczna”)DEF. ”BIBO” – ograniczone wejście – ograniczone wyjście.
System jest stabilny jeśli;
TW. (o stabilności systemów dyskretnych)
System o transmitancji jest stabilny
iff .
Czyli, system dyskretny jest stabilny iff wszystkie bieguny jego dyskretnej transmitancji leżą
wewnątrz koła jednostkowego (tzn. koła o promieniu 1 i środku z = 0)

Skąd się bierze to podstawowe kryterium?
Przypomnijmy, że z = eST (tą zależność wyprowadzimy później).
Jeśli , to (liczba zespolna)
.
Z równania otrzymamy:
O stabilności układów ciągłych decyduje: , - obojętne, ale wprowadza oscylacje
Czyli: , a stąd - powstaje warunek stabilności systemów dyskretnych
Oraz = 0 w systemach ciągłych – granica stabilności,
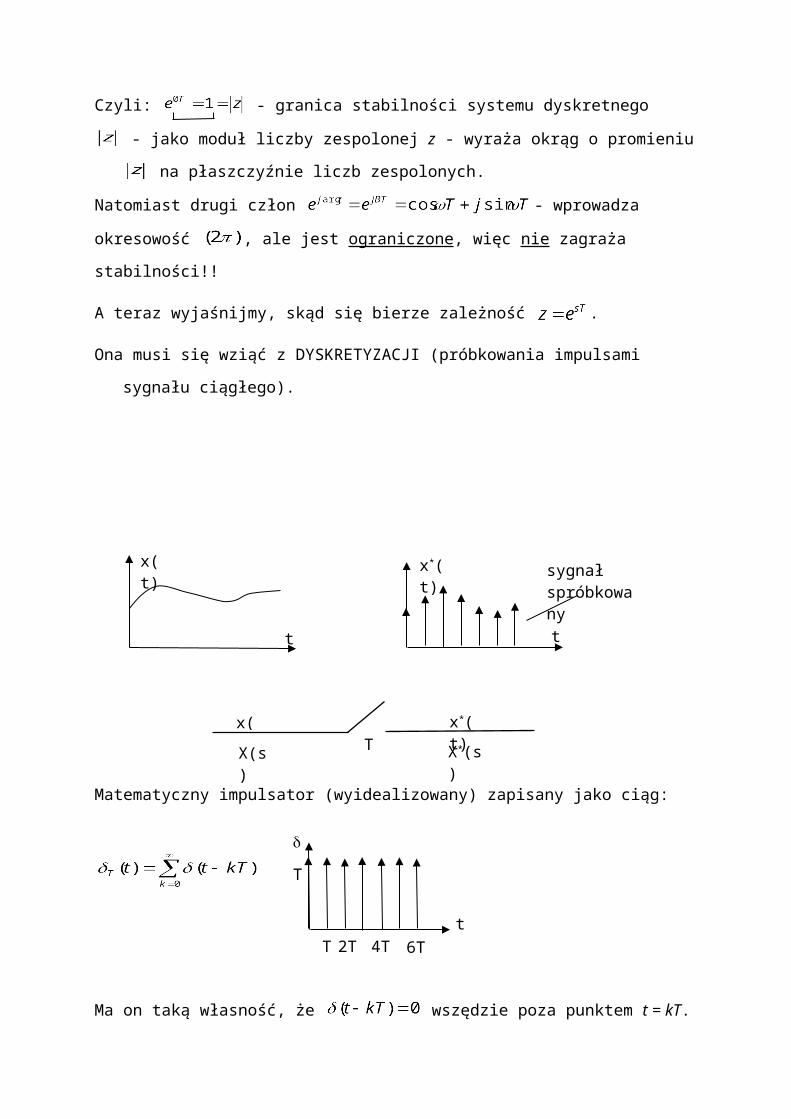
Czyli: - granica stabilności systemu dyskretnego
- jako moduł liczby zespolonej z - wyraża okrąg o promieniu na płaszczyźnie liczb
zespolonych.
Natomiast drugi człon - wprowadza okresowość , ale jest
ograniczone, więc nie zagraża stabilności!!
A teraz wyjaśnijmy, skąd się bierze zależność .
Ona musi się wziąć z DYSKRETYZACJI (próbkowania impulsami sygnału ciągłego).
1
1-1
-1
Im z
Re z
Obszar stabilności systemu dyskretnego

Matematyczny impulsator (wyidealizowany) zapisany jako ciąg:
Ma on taką własność, że wszędzie poza punktem t = kT.
Spróbkowany sygnał x* (t) jest nieskończonym ciągiem impulsów o amplitudach x(t = kT) i
może być opisany sumą nieskończoną:
Jak to matematycznie powstaje?
Sygnał x* (t) jest równy iloczynowi ciągłego wejścia x(t) i matematycznego impulsatora
:
Jeśli podstawimy , to otrzymamy:
- transformatę Z.
x(t)
t
x*(t)
t
sygnałspróbkowany
X(s) Tx*(t)
X*(s)
x(t)
tT 2T 4T 6T
T
WNIOSEK: Jeśli ciągły sygnał x(t) jest okresowo próbkowany (impulsami ), to uzyskany
matematyczny zapis: - transformaty Z,
przy czym pomiędzy zmienną zespoloną a zmienna zespoloną istnieje
wzajemna jednoznaczna zależność: czyli .
Kryteria stabilności systemów dyskretnych
Aby zbadać, czy dyskretny UAR jest stabilny, trzeba rozstrzygnąć, czy wszystkie
pierwiastki z1, z2, ... , zm jego równania ch-nego Mz(z) = 0 leżą w kole jednostkowym, tzn. czy
spełniają nierówności
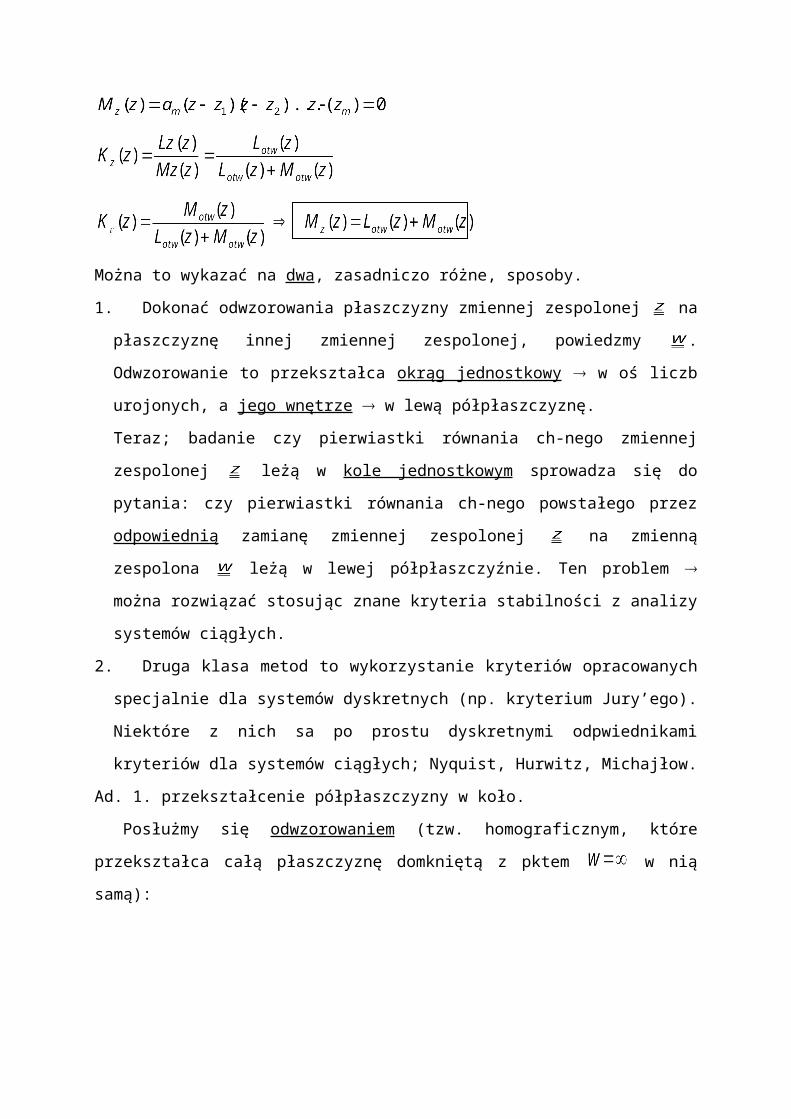
Można to wykazać na dwa, zasadniczo różne, sposoby.
1. Dokonać odwzorowania płaszczyzny zmiennej zespolonej na płaszczyznę innej zmiennej
zespolonej, powiedzmy . Odwzorowanie to przekształca okrąg jednostkowy w oś liczb
urojonych, a jego wnętrze w lewą półpłaszczyznę.
Teraz; badanie czy pierwiastki równania ch-nego zmiennej zespolonej leżą w kole
jednostkowym sprowadza się do pytania: czy pierwiastki równania ch-nego powstałego
przez odpowiednią zamianę zmiennej zespolonej na zmienną zespolona leżą w lewej
półpłaszczyźnie. Ten problem można rozwiązać stosując znane kryteria stabilności z
analizy systemów ciągłych.
2. Druga klasa metod to wykorzystanie kryteriów opracowanych specjalnie dla systemów
dyskretnych (np. kryterium Jury’ego). Niektóre z nich sa po prostu dyskretnymi
odpwiednikami kryteriów dla systemów ciągłych; Nyquist, Hurwitz, Michajłow.
Ad. 1. przekształcenie półpłaszczyzny w koło.
Posłużmy się odwzorowaniem (tzw. homograficznym, które przekształca całą
płaszczyznę domkniętą z pktem w nią samą):

Odwzorowanie z = T (w) przekształca:
Oś Im w w okrąg (granica stabilności);
Lewą półpłaszczyznę we wnętrze koła jednostkowego, czyli w zbiór punktów
dla których ;
Prawą półpłaszczyznę w zewnętrze koła jednostkowego, czyli w zbiór
punktów z takich, że .
Te własności (i inne dodatkowe mniej istotne) pozwalają sprawdzić stabilność DUAR za
pomocą obliczenia, czy wszystkie pierwiastki równania charakterystycznego
leżą w lewej półpłaszczyźnie zmiennej zespolonej w.
Zastosujemy najprostsze obliczeniowo kryterium Hurwitza.
Przykład 1
Dany jest DUAR o równaniu ch-nym: . Sprawdzić stabilność
. Czyli są dwa bieguny transmitancji K(z), które wynoszą:
. Z podstawowego kryterium stabilności DUAR widać, że jest stabilny, bo
, .
Ale sprawdzimy, dokonując podstawienia . Otrzymamy inne równanie
-1 1
Im z
Re z
Im w
Re w
Z=T (w), takie że
T
T -1
Układu zamkniętego
jest równaniem ch-nym o pierwiastkach w1 = -3,
w2. Jest przy tym oczywiste, że zachodzą zależności:
, . Bieguny (pierwiastki równania ch-nego M(w) = 0) leżą w lewej
półpłaszczyźnie zmiennej zespolonej w, natomiast pierwiastki z1, z2 leżą wewnątrz koła
jednostkowego. DUAR jest stabilny.
Przykład 2
- to równanie ma dwa pierwiastki , .
Podstawienie daje rozwiązania w1 = -3, .
Pierwiastek z1 leży w kole jednostkowym, a odpowiadający mu w1 = -3 w lewej
półpłaszczyźnie. Drugi pierwiastek z2 leży poza kołem jednostkowym, a związany z nim w2 w
prawej półpłaszczyźnie DUAR jest niestabilny.
Przykład 3
W dotychczasowym postępowaniu ukryte jest pewne niebezpieczeństwo, co pokazuje
poniższy przykład.
, co oznacza , . Podstawienie daje
równanie o jednym rozwiązaniu w1 = -3 (dobrym). Rozwiązanie
z2 = 1 (granica stabilności układu dyskretnego) nie ma swojego odpowiednika!!
Okazuje się, że p-ktowi z2 = 1 odpowiada . Pierwiastek z2 = 1 jest przyczyną
niestabilności (albo granicy stabilności).
Spróbujmy to pokazać:
Obliczenia:

Kiedy (?) prawdą jest, że:
Tylko wtedy, gdy , bo:
0 = -0
TW. System dyskretny o transmitancji
jest na granicy stabilności iff
, przy czym bieguny transmitancji, dla których zachodzą
równości są co najwyżej jednokrotne.
Wróćmy do zapisu M(z) = 0 (układ dyskretny otwarty lub DUAR).
Sprawdzanie stabilności przy pomocy przekształcenia może zawieść, gdy
równanie M(z) = 0 ma pierwiastek zk = 1.
Zabezpieczenie przed grożącym błędem („zgubienia” pierwiastka).
Zauważmy, że M(1) = 0 iff zk = 1 jest pierwiastkiem równania M(z) = 0. dochodzimy do
ostatecznego związku:
. System dyskretny o równaniu charakterystycznym M(z) = 0 jest stabilny iff
1.
2. wszystkie rozwiązania równania leżą w lewej półpłaszczyźnie zmiennej
zespolonej .
Kryterium Hurwitza
Sprawdzić stabilność dyskretnego systemu o równanie ch-nym

Sprawdzamy 1 warunek:
Podstawiamy i obliczamy
Równanie M(w) = 0 sprawdzamy Hurwitzem.
1. warunek konieczny - spełniony
2. warunek wystarczający, tworzymy macierz Hurwitza 3-go rzędu
Sprawdzamy tylko drugi podwyznacznik:
System stabilny
Istnieje specjalne kryterium stabilności systemów dyskretnych (tylko dla nich!) – zwane
kryterium Jury (podamy jego uproszczoną wersję wg książki: W. Greblicki „Teoretyczne
podstawy automatyki”).
Trzeba wprowadzić pojęcie macierzy wewnętrznej wobec macierzy kwadratowej.
Niech A będzie macierzą kwadratową. Jego kolejne macierze wewnętrzne otrzymuje się
przez:
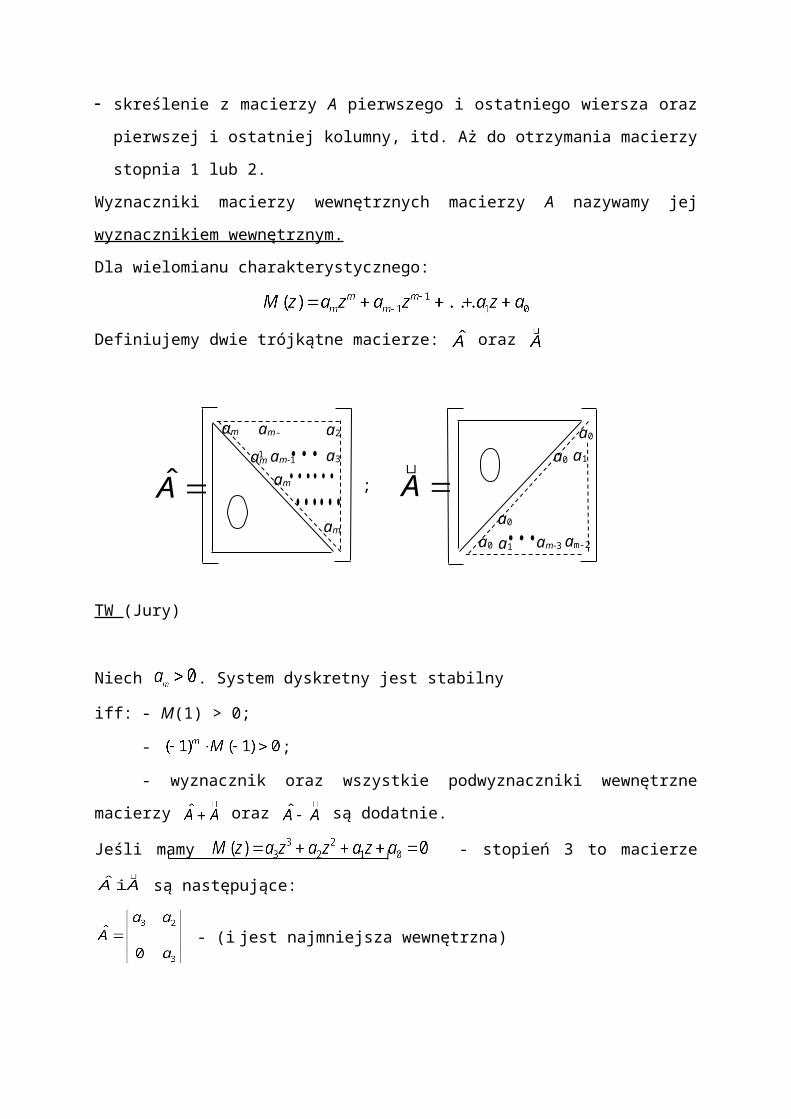
skreślenie z macierzy A pierwszego i ostatniego wiersza oraz pierwszej i ostatniej
kolumny, itd. Aż do otrzymania macierzy stopnia 1 lub 2.
Wyznaczniki macierzy wewnętrznych macierzy A nazywamy jej wyznacznikiem
wewnętrznym.
Dla wielomianu charakterystycznego:
Definiujemy dwie trójkątne macierze: oraz

TW (Jury)
Niech . System dyskretny jest stabilny
iff: - M(1) > 0;
- ;
- wyznacznik oraz wszystkie podwyznaczniki wewnętrzne macierzy oraz
są dodatnie.
Jeśli mamy - stopień 3 to macierze są następujące:
- (i jest najmniejsza wewnętrzna)
- (i jest wewnętrznie najmniejsza)
Przykład 1
;
Sprawdzamy warunki kryterium Jury:
niestabilny, nie ma sensu
sprawdzać trzeciego warunku.
Potwierdzimy niestabilność systemu przy pomocy kryterium Hurwitza.
am am-1 a2
am am-1 a3
am
am
Aa0 a1
a0a0 a1 am-2am-3
a0
A
;

brak wyrazu wolnego (a0=0)system niestabilny z warunku koniecznego kryterium Hurwitza.
Przykład
sprawdzam stabilność wg kryterium Jury.
stabilny
Przykład
sprawdzić stabilność wg Jury1.2.3. Tworzą macierze oraz i wszystkie wewnętrzne!
stabilny
Kryterium stabilności Nyquista dla DUAR
Tak jak dla UAR ciągłych bada ono stabilność układów ze sprzężeniem zwrotnym na
podstawie ch-tyki a-f układu otwartego.
Przypomnijmy dyskretną transmisję widmową:

K(z)y0n n
(-1,j0)
)](1arg[ jeK65
45
)(Re jeK),0[
)( jm eKI
Imz
Re zz1z2
Ze względu na wzór Eulera : , dyskretna transmitancja widmowa jest
funkcją okresową o okresie , czyli .
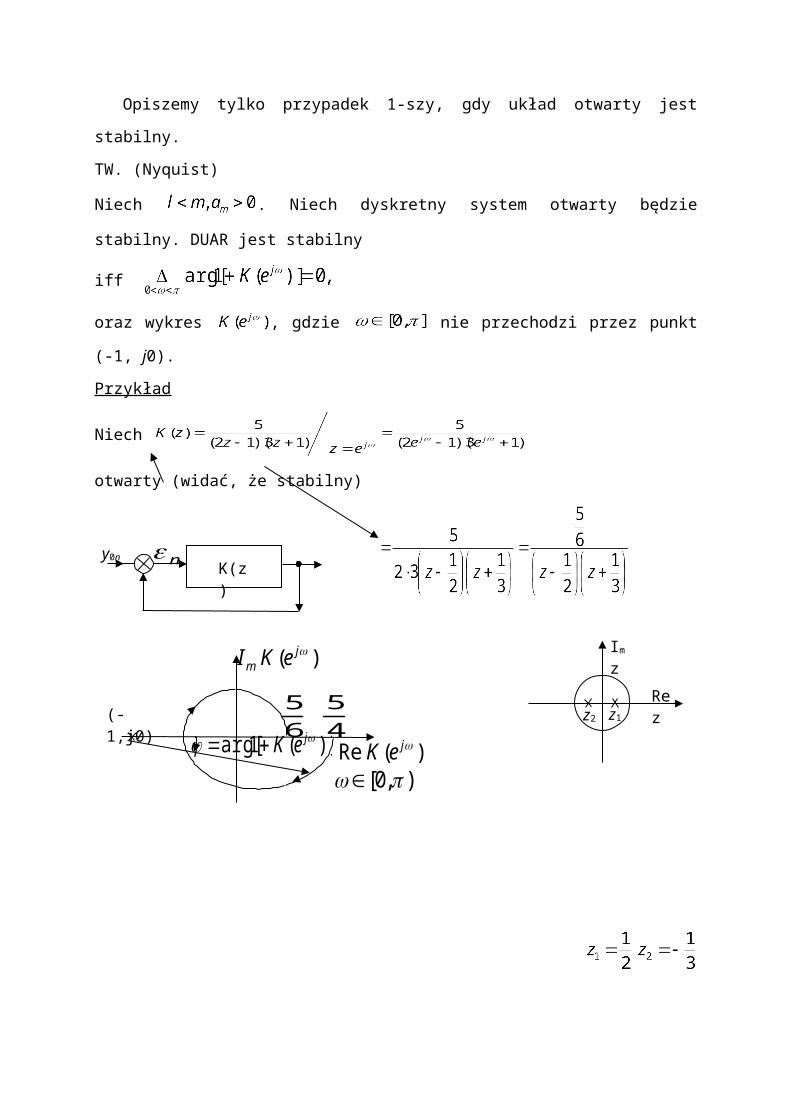
Opiszemy tylko przypadek 1-szy, gdy układ otwarty jest stabilny.
TW. (Nyquist)
Niech . Niech dyskretny system otwarty będzie stabilny. DUAR jest stabilny
iff
oraz wykres , gdzie nie przechodzi przez punkt (-1, j0).
Przykład
Niech
otwarty (widać, że stabilny)
Dyskretna regulacja automatyczna
Transmitancja układu zamkniętego, tzn. układu o wejściu i wyjściu jest równa;
; gdzie .
- uchyb dyskretny.
Regulator powinien zapewnić, aby sygnał wyjściowy obiektu był możliwie bliski
sygnałowi wartości zadanej , czyli aby (lub był możliwie mały).
Podstawowa własnością DUAR jest stabilność, czyli niezależnie od wejścia {yn}0,
Interesuje nas transmitancja uchybowa:
, stąd:
- transmitancja układu otwartego
O obiekcie założymy tylko, że jego transmitancja nie ma bieguna w punkcie z = 1
(pamiętamy, że powodowało to trudności przy badaniu stabilności!!).
Regulacja statyczna, czyli P
KR(z) = kp, regulator jest proporcjonalny, typu P. zakładamy, że system zamknięty jest stabilny
(czyli istnieje granica ) oraz ustalimy, że , czyli:
. Zatem:
.
Ponieważ DUAR jest stabilny, to możemy obliczyć:
KR(z) K0(z) {yn}{yn}0
{yn}
n

TW. graniczne 1 dla ciągów liczbowych:
(jeśli ta granica istnieje, to tyle wynosi)
Wykazaliśmy następującą własność:
WŁ.1.
Niech . W stabilnym, statycznym, dyskretnym systemie regulacji automatycznej:
błąd w stanie ustalonym statycznego DUAR.
TW. (graniczne z)
Dla każdego ograniczonego ciągu {xn} prawdziwa jest zależność:
, gdzie (przypomnienie):
.
Regulacja astatyczna
Regulacja typu I
Podobnie jak przy regulacji statycznej zakładamy, że {yn}0 = {1n}. niech teraz:
będzie dyskretną transmitancją regulatora typu I
(o własnościach sumacyjnych)
Regulator I

1
1 2 3n
- jest to ’1impuls’ przesunięta dyskretna jedynka i zsumowana. W
związku z tym ta transmisja jest dyskretnym odpowiednikiem
całkującego regulatora I.
Przy pobudzeniu sygnałem , wyjście regulatora w chwili n jest
równe .
Odpowiedź impulsowa jest równa 0 dla n = 0 oraz kI dla n = 1, 2, ..., i są
sumowane wraz ze wzorem n. Jeśli DUAR jest stabilny, to z TW. granicznego wynika, że:
WŁ. 2
Niech . W stabilnym systemie automatycznej regulacji astatycznej:
Regulacja PI
Regulator o transmitancji , czyli typu PI zapewni typ regulacji astatycznej,
oraz szybszej niż sam regulator typu I.
Obiekt ciągły sterowany dyskretnie
Instalując w ciągłym systemie automatycznej regulacji impulsator zamienia się go w
system dyskretny (z czasem dyskretnym). Drugim urządzeniem stosowanym w takich
systemach jest ekstrapolator, który zamienia ciąg impulsów Diraca w funkcję schodkową
(zero-order hold).
Impulsator
Impulsator zamienia funkcję czasu w ciąg impulsów DIRACA modulowanych przez jej
wartości w chwilach 0, T, 2T, 3T, ... . liczba T jest okresem impulsowania.
Współpraca impulsatora z ekstrapolatorem (‘hold’).
Wyjściem ekstrapolatora jest funkcja stała na odcinkach [0, T), [T, 2T), ... .na odcinku [0, T)
przyjmuje ona wartość u(0), na [T, 2T) wartość u(T)... czyli:
dla .
Zauważmy, że:
h(t) = 1(t) =1(t-T), na jednym odcinku okresu T tak zachowuje
się schodkowy
ekstrapolator
h(t) = 1(0) - 1(0-T)/L
Jak możemy otrzymać transmitancję dyskretną?
u(t) u*(t)T
u(t) u*(t)T
E)(tu
t
0 T
1(t) 1(t-T)

(**)
Przykład
Mamy układ ciągły o równaniu y(t) = u(t-T) (jest to r.r. zerowego rzędu z opóźnieniem o T).
jego odpowiednia impulsowa jest a transmitancją .
Zauważmy, że {kn} ma teraz postać {0, 1, 0, 0, ...}. stąd wynika, że .
Obiekt ciągły, impulsator i ekstrapolator
Impulsatorowi znajdującemu się na wejściu obiektu ciągłego o transmitancji K(s) może
towarzyszyć ekstrapolator:
Sygnały u*(t) i y*(t) są ciągami impulsów Diraca, z którymi można w sposób jednoznaczny
skojarzyć ciągi liczbowe u(0), u(T), u(2T), ... oraz y(0), y(T), y(2T), ... . Oznaczając
i możemy stwierdzić, że ciąg liczbowy jest
przez system dynamiczny przetwarzany na ciąg liczbowy i że system,
który wykonuje te operację jest natury dyskretnej, czyli na transmitancję K(z).
Możemy zapisać (na podstawie poprzedniego rysunku):
,
.
Dyskretny UAR
Zegar
u(t)T
u*(t)E K(s)
y(t)Ty*(t))(tu
K(z) {yn}{un}

Wykorzystując impulsator i ekstrapolator można budować systemy automatycznej regulacji,
w których obiekty ciągłe sterowane są w sposób dyskretny .
UAR z impulsatorami i odpowiadający mu schemat DUAR
Sygnały oraz można utożsamiać z ciągami liczbowymi
.
Należy zaznaczyć, że o ile system ciągły z impulsatorami realnie istnieje, to system
dyskretny jest jedynie pewną abstrakcją matematyczną, ułatwiającą obliczenia.
KR(z), K0(z) obliczamy z procedurą (**).
KR(s) K0(s) y*(t)
y0(t) )(*0 ty )(* t u(t) u*(t) y(t)
y*(t)
KR(z) K0(z) }{ n {un}{yn}0 {yn}
{yn}