tarea 3 - sistemas lineales
DESCRIPTION
tarea N°3 Sistemas Lineales Dinamicos UdeCTRANSCRIPT
Sistemas Lineales Dinámicos (543214-1)
Tarea #3
S1-2014
30/06/2014
Nombres: Luis Mora Melo
Juan Chávez Friz
Universidad de Concepción
Facultad de Ingeniería
Departamento Ingeniería civil Eléctrica
DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 2
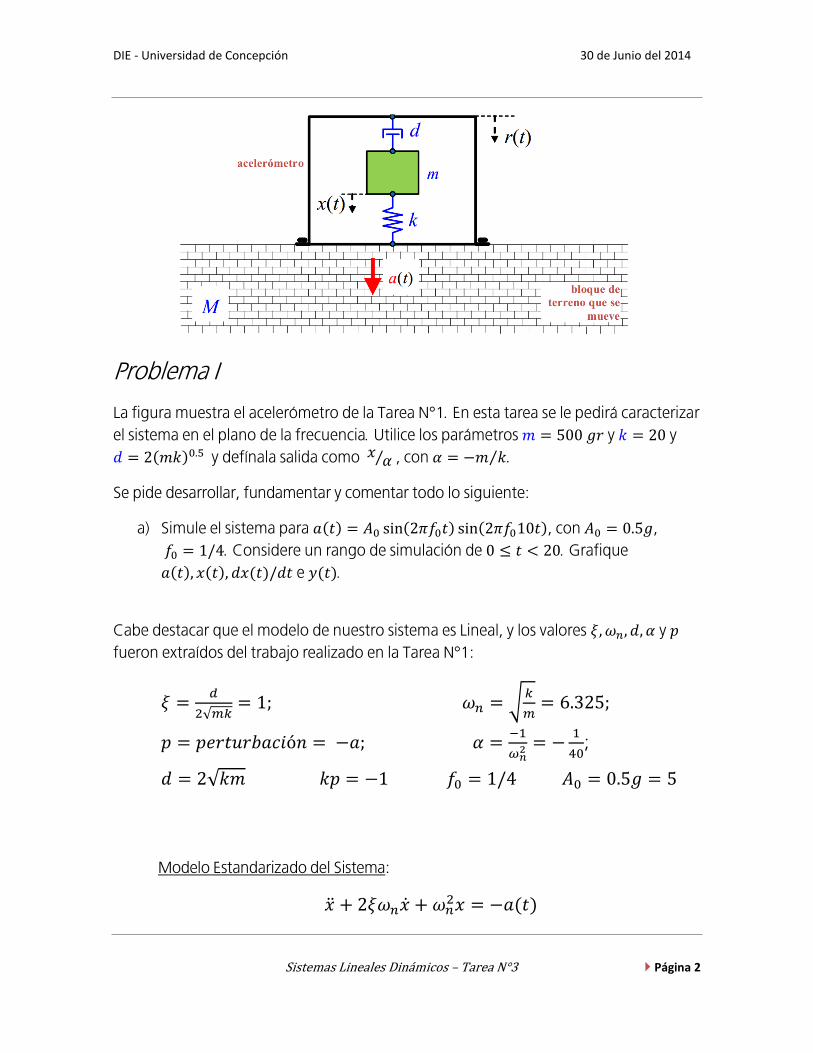
Problema I
La figura muestra el acelerómetro de la Tarea N°1. En esta tarea se le pedirá caracterizar el sistema en el plano de la frecuencia. Utilice los parámetros 𝑚 = 500 𝑔𝑟 y 𝑘 = 20 y 𝑑 = 2(𝑚𝑘)0.5 y defínala salida como 𝑥 𝛼⁄ , con 𝛼 = −𝑚 𝑘⁄ .
Se pide desarrollar, fundamentar y comentar todo lo siguiente:
a) Simule el sistema para 𝑎(𝑡) = 𝐴0 sin(2𝜋𝑓0𝑡) sin(2𝜋𝑓010𝑡), con 𝐴0 = 0.5𝑔, 𝑓0 = 1/4. Considere un rango de simulación de 0 ≤ 𝑡 < 20. Grafique 𝑎(𝑡), 𝑥(𝑡), 𝑑𝑥(𝑡)/𝑑𝑡 e 𝑦(𝑡).
Cabe destacar que el modelo de nuestro sistema es Lineal, y los valores 𝜉, 𝜔𝑛, 𝑑, 𝛼 y 𝑝 fueron extraídos del trabajo realizado en la Tarea N°1:
𝜉 =𝑑
2√𝑚𝑘= 1; 𝜔𝑛 = √
𝑘
𝑚= 6.325;
𝑝 = 𝑝𝑒𝑟𝑡𝑢𝑟𝑏𝑎𝑐𝑖ó𝑛 = −𝑎; 𝛼 =−1
𝜔𝑛2 = −
1
40;
𝑑 = 2√𝑘𝑚 𝑘𝑝 = −1 𝑓0 = 1/4 𝐴0 = 0.5𝑔 = 5
Modelo Estandarizado del Sistema:
�̈� + 2𝜉𝜔𝑛�̇� + 𝜔𝑛2𝑥 = −𝑎(𝑡)

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 3
𝑎(𝑡) = 𝐴0 sin(2𝜋𝑓0𝑡) sin(2𝜋𝑓0
10 ⋅ 𝑡)
𝑎(𝑡) = 5 sin(𝜋
2𝑡) sin(
𝜋
20𝑡)
Gráfica a1: posición de la masa c/r al tiempo continuo
Gráfica a2: Velocidad de la masa c/r al tiempo continuo

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 4
Gráfica a3: Aceleración de la masa c/r al tiempo continuo
Gráfica a4: Salida del sistema c/r al tiempo
Los gráficos anteriores muestran la posición, velocidad y aceleración del bloque, además de la salida del sistema. Notamos que en todas las gráficas las señales alcanzan sus puntos más altos y bajos entre los tiempos 8<t<12 esto pues la perturbación del sistema al ser una onda senoidal alcanza su máxima amplitud para estos valores de t . Por otro lado, cabe destacar que todas las gráficas inician en el mismo punto para t=0 puesto que el sistema parte desde el reposo.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 5
b) Obtener sistemáticamente un modelo discreto del tipo 𝑥𝑑(𝑘 + 1) = 𝐴𝑑𝑥𝑎(𝑘) +
𝐵𝑑𝑎𝑑(𝑘); 𝑦𝑑(𝑘) = 𝐶𝑑𝑥𝑑(𝑘) + 𝐷𝑑𝑎𝑑(𝑘). Es decir, encontrar las matrices 𝑨𝒅, 𝑩𝒅, 𝑪𝒅, 𝑫𝒅, 𝑬𝒅 y 𝑭𝒅 para un muestreo de 𝑇 = 0.5. Simule con las condiciones de (𝑎), utilizando la entrada de (a) apropiadamente muestreada (sin retentor). Grafique 𝑥𝑑(𝑘𝑇), 𝑎𝑑(𝑘𝑇) e 𝑦𝑑(𝑘𝑇). Compare los resultados discretos con los continuos de (𝑎).
𝑥𝑑(𝑘 + 1) = 𝐴𝑑𝑥𝑑(𝑘) + 𝐵𝑑𝐴𝑑(𝑘)
𝑦𝑑(𝑘) = 𝐶𝑑𝑥𝑑(𝑘) + 𝐷𝑑𝐴𝑑(𝑘)
Sabemos de la tarea N°2
𝐴 = (0 1
−𝜔𝑛2 −2𝜉𝜔𝑛
) 𝐵 = (01
) 𝐶 = (1/𝛼 0)
Para u(t) constante, entre intervalos de muestreo, se tiene:
𝐴𝑑 = 𝑒𝐴𝑇 = 𝛷(𝑇) = 𝑇−1𝑑𝑖𝑎𝑔{𝑒𝜆1𝑇 , 𝑒𝜆2𝑇}𝑇
𝐵𝑑 = ∫ 𝑒𝐴(𝑇−𝜏)𝐵 𝑑𝜏𝑇
0
𝐸𝑑 = ∫ 𝑒𝐴(𝑇−𝜏)𝐸 𝑑𝜏𝑇
0
Con 𝑇−1 la matriz formada por los vectores propios asociados a los valores propios que se obtienen al resolver:
|𝜆𝐼 − 𝐴| = 0
Con T= 0.5, se obtienen:
𝜆1 = −6.325 = −√40
𝜆2 = −6.325 = −√40

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 6
Gráfica b1: comparación de la posición de la masa en tiempo continuo y posición de la masa en
tiempo discreto.
Gráfica b2: Comparación de la velocidad de la masa en tiempo continuo y la velocidad en
tiempo de discreto

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 7
Gráfica b3: Comparación de la aceleración de la masa en tiempo continuo y aceleración de la
masa en tiempo discreto
Gráfica b4: Comparación de la salida en tiempo continuo con la salida en tiempo discreto Al realizar la simulación se esperaba que los gráficos en tiempo continuo y discreto estuvieran perfectamente superpuestos, lo que ocurrió sólo con su aceleración (gráfica b3) ya que solo es un muestreo de éstas con T=0.5. Luego, se observa que los demás gráficos no corresponden exactamente a los continuos, esto a causa de que en la resolución para encontrar las matrices discretas se requiere que la perturbación (para efectos de cálculos trabajamos la perturbación como la entrada) se mantenga constante, y esto no se puede concretar debido a la presencia de las multiplicaciones de ondas senoidales (función no constante entre intervalos de muestreo)

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 8
c) Repita (𝑏) pero utilice un retentor de orden cero para la entrada. Compare estos resultados con los discretos de (𝑏).
Gráfica c1: comparación de la posición de la masa en tiempo continuo y posición de la masa en tiempo discreto, con un retentor de orden cero para la entrada.
Gráfica c2: Comparación de la velocidad de la masa en tiempo continuo y la velocidad en tiempo de discreto, con un retentor de orden cero para la entrada.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 9
Gráfica c3: Comparación de la aceleración de la masa en tiempo continuo y aceleración de la masa en tiempo discreto, con un retentor de orden cero para la entrada.
Gráfica c4: Comparación de la salida en tiempo continuo con la salida en tiempo discreto, con un retentor de orden cero para la entrada.
Podemos darnos cuenta desde la gráfica de la perturbación que ya no se comporta como una onda, si no que como una variedad de escalones, esto tras haber aplicado el retentor de orden 0. Además podemos apreciar que el sistema en tiempo discreto está perfectamente

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 10
superpuesto a las gráficas en tiempo continuo, esto pues como mencionamos anteriormente la perturbación al haberle aplicado el retentor de orden 0, se consiguió que este fuera constante en intervalos de muestreo lo que implica que el sistema de tiempo discreto este perfectamente superpuesto al de tiempo continuo.
d) Encuentre la expresión de la F. de T. ℎ(𝑠) a partir del modelo. Para esto utilice las definiciones 𝑝1 y 𝑝2 para las raíces del polinomio característico.
Función de transferencia: ℎ(𝑠) = 𝑦(𝑠)/𝑢(𝑠)
�̈� + 2𝜉𝜔𝑛�̇� + 𝜔𝑛2𝑥 = −𝑎(𝑡)
𝑠2𝑥(𝑠) − 𝑠𝑥(0) − �̇�(0) + 2𝜔𝑛𝑠 ⋅ 𝑥(𝑠) − 𝑥(0) + 𝜔𝑛2(𝑥) = −𝑎(𝑠)
𝑠2𝑥(𝑠) + 2𝜔𝑛𝑠 ⋅ 𝑥(𝑠)) + 𝜔𝑛2(𝑥) = −𝑎(𝑠)
𝑦(𝑠) =𝑥(𝑠)
(−𝜔𝑛2)−1
⟹ 𝑦(𝑠)
−𝜔𝑛2
= 𝑥(𝑠)
𝑠2𝑦(𝑠) + 2𝜔𝑛𝑠𝑥(𝑠) + 𝜔2𝑥(𝑠) = 𝑎(𝑠)𝜔𝑛
2
ℎ(𝑠) =𝑦(𝑠)
𝑎(𝑠)=
𝜔𝑛2
𝑠2 + 2𝜔𝑛𝑠 + 𝜔𝑛2
=40
𝑠2 + 4√10 ⋅ 𝑠 + 40
Polinomio característico:
𝑠2 + 4√10𝑠 + 40 = 0 Luego, los valores propios son:
𝑠1 = −6.325 = −√40
𝑠2 = −6.325 = −√40 Puesto que los valores propios son reales negativos, la función de transferencia se define de la siguiente manera:
ℎ(𝑠) =−𝑃1−𝑃2
(𝑠−𝑃1)(𝑠−𝑃2)

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 11
e) Grafique el diagrama de bode exacto y asintótico de la F. de T. ℎ(𝑠). Utilice el rango logarítmico 10−1𝑟𝑎𝑑/𝑠 ≤ 𝜔 ≤ 102 𝑟𝑎𝑑/𝑠. Superponga los Bodes.
Gráfica e1: Módulo del diagrama de bode exacto y asintótico
Gráfica e2: Fase del diagrama de bode exacto y asintótico.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 12
Podemos apreciar de las graficas que el bode exacto-modulo esta acotado por el bode asintótico-modulo además que para ciertos valores de omega estos se superponen. Cabe destacar que para el valor donde se produce el quiebre del bode asintótico de la figura e1 es el mismo donde el bode asintótico intersecta al bode exacto en el gráfico e2
f) Si la entrada es 𝑎𝑠(𝑡) = 𝐴0[sin(2𝜋𝑓0𝑡) −1
5sin (10𝜋𝑓0𝑡)], con 𝑓0 = 1/10
determine el bode exacto la atenuación/amplificación y atraso/adelanto para 𝑓0 y 5𝑓0. Utilice estos resultados para generar la expresión de la salida 𝑦𝑠(𝑡) para la perturbación 𝑎𝑠 y grafique la aceleración y la salida
Calculando la magnitud y la fase del bode exacto para cada múltiplo de 𝑓0 , se tiene:
Para 𝑓0:
|ℎ(𝑗2𝜋𝑓𝑜)| = 0.9902 ∠ℎ(𝑗2𝜋𝑓𝑜) = −11.3470 [𝑟𝑎𝑑]
Para 5𝑓0:
|ℎ(𝑗2𝜋5𝑓𝑜)| = 0.8021 ∠ℎ(𝑗2𝜋5𝑓𝑜) = −52.8299 [𝑟𝑎𝑑]
De lo que se obtiene la salida: 𝑦𝑠(𝑡) = 5[(|∆ℎ(𝑗2𝜋𝑓0)| sin(2𝜋𝑓0𝑡 + ∠∆ℎ(𝑗2𝜋𝑓0))
−1
5|∆ℎ(𝑗2𝜋5𝑓0)| sin(2𝜋5𝑓0𝑡 + ∠∆ℎ(𝑗2𝜋5𝑓0))]

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 13
Gráfica f1: Entrada c/r al tiempo.
Gráfica f2: Salida para la nueva entrada dada
Apreciamos que los dos gráficos son muy parecidos pero con un leve desfase, ya que estamos hablando de un sistema lineal.
g) Simule el sistema continuo pero con la entrada como indicada en (𝑓) y compare los resultados con los calculados en (𝑓). Asegúrese de estar en 𝑆. 𝑆. en 𝑡 = 0.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 14
Gráfica g1: Posición de la masa para la nueva entrada.
Gráfica g2: Velocidad de la masa para la nueva entrada.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 15
Gráfica g3: Aceleración de la masa para la nueva entrada
Gráfica g4: Aceleración Normalizada de la masa para la nueva entrada

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 16
Gráfica g5: Salida Ys(t) para la nueva entrada
Si comparamos estos resultados con los obtenidos en F notamos que las gráficas de la salida reconstruida desde el bode son idénticas, luego se deja en evidencia la utilidad de éste puesto que nos permite encontrar la respuesta de un sistema para entradas periódicas sin la necesidad de resolver ecuaciones diferenciales tan complejas. Además hacemos notar que las demás graficas ya no inician en 0 debido a que el sistema se encuentra en un estado S.S
h) Simule el sistema discreto de (𝑏) pero con la entrada como indicada en (𝑓) pero discretizada (sin retentor) y compare los resultados con los simulados en (𝑔). Asegúrese de estar en 𝑆. 𝑆. en 𝑡 = 0.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 17
Gráfica h1: Comparación de la posición de la masa en tiempo continuo y discreto para
la nueva entrada.
Gráfica h2: Comparación de la Velocidad de la masa en tiempo continuo y discreto para
la nueva entrada.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 18
Gráfica h3: Comparación de la Aceleración de la masa en tiempo continuo y discreto
para la nueva entrada.
Gráfica h4: Comparación de la Aceleración Normalizada de la masa en tiempo continuo
y discreto para la nueva entrada.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 19
Nuevamente al igual que en la pregunta B, se esperaba que todos los gráficos en tiempo continuo y discreto estuvieran perfectamente superpuestos , lo que ocurrió únicamente con la aceleración, esto se debe a que solo es un muestreo de T=0.5.Luego, se observa que los demás gráficos no corresponden exactamente a los continuos, esto a causa de que en la resolución para encontrar las matrices discretas se requiere que la perturbación(para este efectos de cálculos trabajamos la perturbación como la entrada) se mantenga constante, y esto no se puede concretar debido a la presencia de las multiplicaciones de ondas senoidales (función no constante entre intervalos de muestreo).Además cabe mencionar que todas las graficas ya no inician en 0 debido a que el sistema se encuentra en un estado S.S
i) Simule el sistema continuo con la entrada como indicada en (𝑓) pero utilizando
un retentor de orden cero. Compare estos resultados con los obtenidos en (ℎ). Asegúrese de estar en 𝑆. 𝑆. en 𝑡 = 0.
Gráfica i1: Comparación de la posición de la masa en tiempo continuo y discreto para la
nueva entrada y un retentor de orden cero

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 20
Gráfica i2: Comparación de la velocidad de la masa en tiempo continuo y discreto para
la nueva entrada y un retentor de orden cero
Gráfica i3: Comparación de la aceleración de la masa en tiempo continuo y discreto
para la nueva entrada y un retentor de orden cero

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 21
Gráfica i4: Comparación de la salida en tiempo continuo y discreto para la nueva
entrada y un retentor de orden cero
Nuevamente, podemos concluir que al igual que en la pregunta C, se consiguió que la entrada fuera constante en intervalos de muestreo lo que implica que el sistema de tiempo discreto este perfectamente superpuesto a las gráficas de tiempo continuo lo que se puede apreciar claramente de las gráficas anteriores.
j) Grafique el diagrama de Bode de la F. de T. del sistema discreto ℎ(𝑧) a partir del
modelo lineales obtenido en (𝑏). Utilice el rango lineal 0 𝑟𝑎𝑑/𝑠 ≤ 𝜔 ≤ 𝜋/𝑇 𝑟𝑎𝑑/𝑠.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 22
Gráfica j1: modulo del diagrama de bode de la F. de T. del modelo obtenido en (b)
Gráfica j2: fase del diagrama de bode de la F. de T. del modelo obtenido en (b)
Se sabe que los Bodes Discretos se presentan en forma periódica, pero como simulados la mitad del periodo completo solo se puede apreciar la mitad del ciclo. Además, cabe destacar que el Bode Discreto tiene un comportamiento similar al Bode Continuo gracias al valor de T . A medida que disminuye el tiempo de muestro, el Bode Discreto se asemeja más al Continuo y lo contrario si aumenta tal tiempo de muestreo este.

DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 23
k) Si la entrada en el sistema discreto equivalente es 𝑎𝑠(𝑘𝑇) determine la atenuación/amplificación y atraso/adelanto para los armónicos 𝑓0 y 5𝑓0. Utilice estos resultados para generar la expresión de la salida 𝑦𝑆(𝑘𝑇) para la perturbación 𝑎𝑠(𝑘𝑇) y grafique la aceleración y la salida. Calculando la magnitud y la fase del bode exacto para cada múltiplo de 𝑓0 , se tiene: Para 𝑓0:
|ℎ(𝑗2𝜋𝑓𝑜)| = 1.3807 ∠ℎ(𝑗2𝜋𝑓𝑜) = −5.6874 [𝑟𝑎𝑑]
Para 5𝑓0:
|ℎ(𝑗2𝜋5𝑓𝑜)| = 0.9756 ∠ℎ(𝑗2𝜋5𝑓𝑜) = −27.8961 [𝑟𝑎𝑑]
De lo que se obtiene la salida: 𝑦𝑠(𝑡) = 5[(|∆ℎ(𝑗2𝜋𝑓0)| sin(2𝜋𝑓0𝐾𝑇 + ∠∆ℎ(𝑗2𝜋𝑓0))
−1
5|∆ℎ(𝑗2𝜋5𝑓0)| sin(2𝜋5𝑓0𝐾𝑇 + ∠∆ℎ(𝑗2𝜋5𝑓0))]
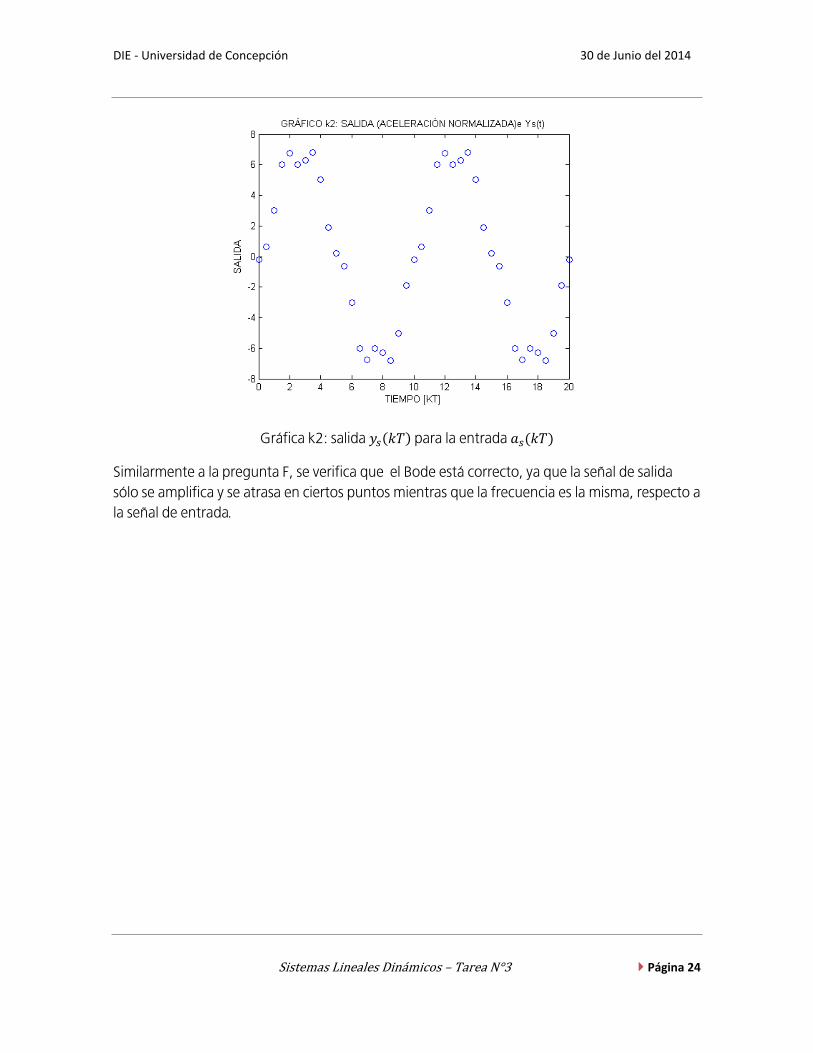
Gráfica k1: Aceleración de la masa para la entrada 𝑎𝑠(𝑘𝑇)
DIE - Universidad de Concepción 30 de Junio del 2014
Sistemas Lineales Dinámicos – Tarea N°3 Página 24
Gráfica k2: salida 𝑦𝑠(𝑘𝑇) para la entrada 𝑎𝑠(𝑘𝑇)
Similarmente a la pregunta F, se verifica que el Bode está correcto, ya que la señal de salida sólo se amplifica y se atrasa en ciertos puntos mientras que la frecuencia es la misma, respecto a la señal de entrada.