sistemas lineales i
TRANSCRIPT
1
Sistemas Lineales I
CINVESTAV-IPN Unidad Guadalajara
Curso impartido por: Dr. Javier Ruiz
Cuatrimestre: Septiembre-Diciembre de 2013
2
Objetivos generales del curso:
• Que el alumno aprenda la descripción de sistemas dinámicos lineales en espacio de estado y sepa analizar las características básicas de esta representación del sistema, como controlabilidad, observabilidad y estabilidad.
• Que el alumno sepa aplicar control por retroalimentación de estado y diseño de observadores para sistemas escalares.
3
1. Sistemas dinámicos y variables de estado 1.1 Introducción 1.2 Definiciones básicas 1.3 Descripción entrada-salida 1.4 El concepto de estado
2. Descripción de sistemas lineales en variables de estado 2.1 Representación de sistemas en variables de estado 2.2 Solución de la ecuación de estado 2.3 Representaciones canónicas 2.4 Transformaciones de similitud 2.5 Interpretación dinámica de polos y ceros
Programa del curso
4
3. Controlabilidad y observabilidad 3.1 Controlabilidad 3.2 Observabilidad 3.3 Principio de dualidad 3.4 Representaciones mínimas 3.5 Transformaciones de similitud a formas canónicas 3.6 Representación de sistemas no controlables/ no observables 3.7 Pruebas PBH para controlabilidad y observabilidad
4. Conceptos básicos de estabilidad
5
5. Retroalimentación de estado 5.1 Asignación del polinomio característico del sistema 5.2 Efecto de la retroalimentación sobre ceros del sistema, controlabilidad y observabilidad 5.3 Referencia constante en estado permanente 5.4 Rechazo de perturbaciones constantes
6. Observadores de estado 6.1 Diseño del observador 6.2 Esquema observador-controlador
6
• T. Kailath, “Linear Systems”, Prentice Hall, 1980.
• C.T. Chen, “Linear Systems, Theory and Design”, Holt, Rinehart and Winston, 1984.
• K. Ogata, “Modern Control Engineering”, Prentice Hall, 1997.
• R.C. Dorf, “Sistemas Modernos de Control: Teoría y Práctica”, Addison-Wesley, 1989.
• G.F. Franklin, J.D. Powell, A. Emami-Naeini, “Control de Sistemas Dinámicos con Retroalimentación”, Addison-Wesley, 1989.
Bibliografía
7
• K. Ogata, “Solving Control Engineering Problems with Matlab”, Prentice Hall, 1994.
8
1. Sistemas dinámicos y variables de estado
9
1.1 Introducción
Objetivo: Análisis y diseño de sistemas de control.
Estudio de sistemas lineales:
• Necesidad de “controlar” un sistema. • Es el tipo más sencillo de sistemas que podemos encontrar.• Muchos sistemas físicos pueden considerarse como lineales.• Los conceptos desarrollados se aplican en otras áreas.
10
Sistema físico modelo del sistema
Modelo de un sistema:
• El modelo matemático de un sistema dinámico es un conjunto de ecuaciones que representan las características dinámicas del sistema.
• Un sistema puede ser representado de varias maneras diferentes, y por lo tanto puede tener varios modelos matemáticos.
• La dinámica de los sistemas se describe generalmente en términos de ecuaciones diferenciales, las cuales se obtienen usando leyes físicas.
• Simplicidad contra exactitud.
11
Control clásico
Ecuación diferencial lineal
Transformada de Laplace
Función de transferencia
m
ii
ii
n
ii
ii dt
tudb
dttyd
a00
)()(
12
• Análisis de respuesta en el tiempo.
• Retroalimentación.
• Lugar de las raíces.
• Análisis de respuesta en la frecuencia: Bode, Nyquist.
Limitaciones de control clásico:
• Aplicable solamente a sistemas lineales escalares.
• Los sistemas no son óptimos en ningún sentido.
• No era posible extender resultados a otro tipo de sistemas.
• Existían algunos “aspectos” que no se entendían muy bien.
13
Control moderno (espacio de estado)
• Descripción más completa.
• Permite estudiar sistemas multivariables.
• Extensión a otro tipo de sistemas (sistemas no lineales, sistemas variantes en el tiempo, etc.).
• Resultados sencillos y elegantes.
Algunas áreas de Teoría de control:
Sistemas lineales, sistemas no lineales, control óptimo, control robusto, identificación, control adaptable, control inteligente, sistemas de eventos discretos, sistemas híbridos, etc.
14
1.2 Definiciones básicas
Un sistema se entenderá como una relación entre entradas y salidas. Esto puede denotarse matemáticamente como
donde u es la entrada o entradas del sistema, y es la salida o salidas del sistema, y H determina la relación entre ellas.
Un sistema es determinista si a cada entrada le corresponde una y solo una salida, es decir, la relación (1.1) es una función.
][uHy )1.1(
15
Estamos interesados en aquellos sistemas en los cuales tanto la entrada como la salida pueden ser representadas por funciones de una variable independiente t que será la variable tiempo.
Entonces, un sistema consta de:
• Un conjunto de entradas u cuyos elementos son funciones del tiempo.
• Un conjunto de salidas y cuyos elementos son funciones del tiempo.
• Una función H, que define una correspondencia unívoca entre los elementos del conjunto de entradas u y los elementos del conjunto de salidas y.
16
Un sistema se dice monovariable o escalar si tiene una sola entrada y una sola salida. Si el sistema tiene más de una entrada o más de una salida, entonces es un sistema multivariable.
Un sistema se dice causal o no anticipatorio si la salida del sistema al tiempo no depende del valor de la entrada aplicada después del tiempo es decir, la salida depende solamente de la entrada aplicada antes y al tiempo
Observe que esta definición implica que un sistema no causal es capaz de predecir entradas futuras, lo cual es imposible para los sistemas físicos. Por lo tanto, la causalidad es una propiedad intrínseca de cualquier sistema físico.
1t,1t
.1t
17
Un sistema dinámico es aquel cuya salida presente depende de entradas pasadas y presentes. Si el valor de la salida al tiempo depende solamente de la entrada aplicada en el sistema se conoce entonces como sistema estático o sistema sin memoria.
Observe que la salida de un sistema estático permanece constante si la entrada no cambia, mientras que en un sistema dinámico la salida cambia con el tiempo, a pesar de que la entrada no cambie (a menos que se encuentre en un estado o punto de equilibrio).
1t,1t
18
Un sistema se dice que es invariante en el tiempo, fijo o estacionario, si sus características no cambian con el tiempo, es decir, sus propiedades son invariables con traslaciones en el tiempo.
19
1.3 Descripción entrada-salida
Para establecer una relación entrada-salida de un sistema, se aplican diferentes tipos de entradas, se miden las salidas, y se trata de establecer una relación entre ellas.
Consideramos aquí sistemas causales y dinámicos. Para este tipo de sistemas, la salida al tiempo depende no solamente de la entrada aplicada en sino también de entradas previas.
Si aplicamos la entrada es evidente que la salida no puede determinarse de manera única, a menos que se conozca la entrada que se aplicó antes de
0t
0t
,),[ 0 tu
.0t
20
Por lo tanto, para obtener una relación entrada-salida que describa de manera adecuada las propiedades del sistema, es necesario suponer que la salida al tiempo depende solamente de la entrada aplicada a partir de es decir, que el sistema está en reposo en
Un sistema se dice relajado al tiempo inicialmente relajado, o en reposo, si la salida depende única y exclusivamente de la entrada
0t,0t
.0t
,0t
.),[ 0 tu,),[ 0 ty
21
Un sistema se dice lineal (desde el punto de vista entrada-salida), si cumple con el principio de superposición, esto es, si para 2 entradas cualquiera y 2 números reales se cumple que
Si la relación anterior no se cumple, entonces el sistema se dice no lineal.
21 , uu 21 ,
).()()( 22112211 uHuHuuH
22
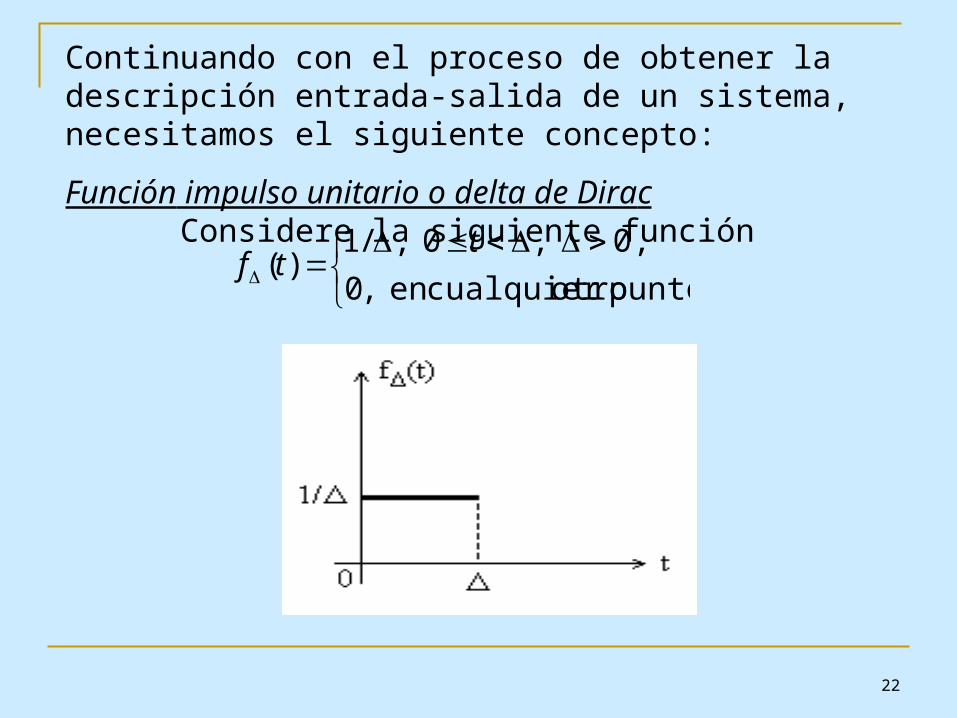
Continuando con el proceso de obtener la descripción entrada-salida de un sistema, necesitamos el siguiente concepto:
Función impulso unitario o delta de Dirac Considere la siguiente función
punto. otrocualquier en ,0
0, ,0 ,/1)(
ttf
23
Se define la función impulso unitario o delta de Dirac como
).(lim)( 0 tft
24
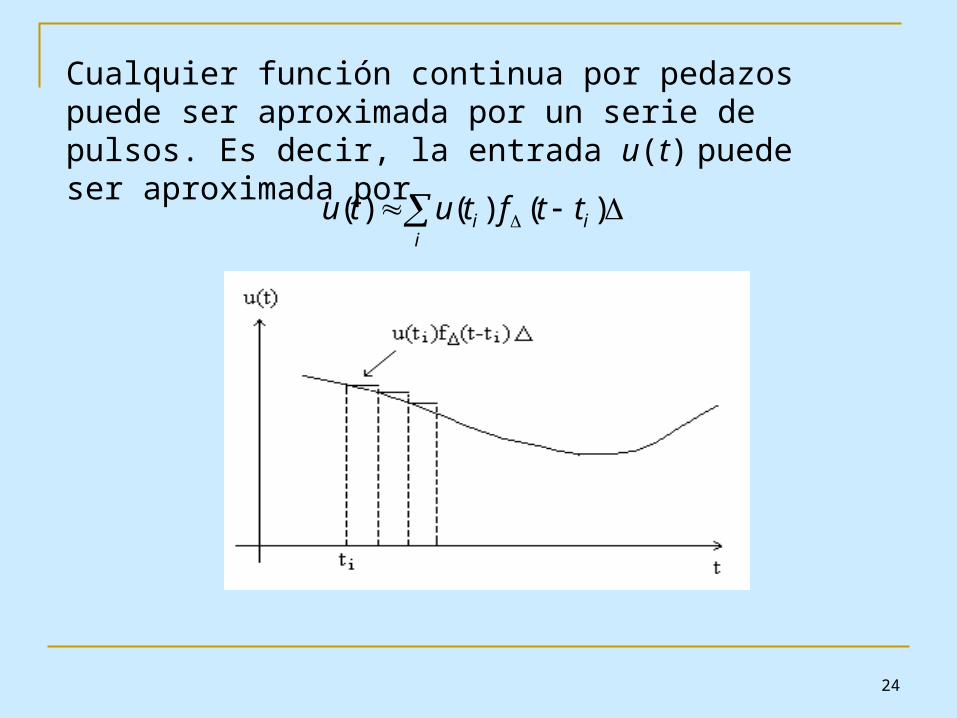
Cualquier función continua por pedazos puede ser aproximada por un serie de pulsos. Es decir, la entrada u(t) puede ser aproximada por
i
ii ttftutu .)()()(
25
Si el sistema es lineal, entonces
Cuando tenemos que
De la ecuación anterior, si se conoce entonces se puede obtener la salida del sistema para cualquier entrada.
.)()(
)()()(
ii
i
iii
tuttfH
ttftuHuHy
,0
.)()( dutHy
, todapara )( tH
26
La función es la salida del sistema relajado cuando se le aplica un impulso unitario al tiempo por lo tanto se le conoce como la respuesta al impulso del sistema.
Denotando la salida del sistema es entonces
Si el sistema es causal, es decir
)( tH,
),,(:)( tgtH
.)(),()( dutgty
, tpara 0),( tg
.)(),()( dutgtyt
27
Considerando que el sistema está relajado en t=0, entonces
Si el sistema es invariante en el tiempo, se tiene que
Entonces, bajo las condiciones de linealidad, causalidad, relajamiento e invariancia en el tiempo, la salida del sistema está dada por
.)(),()(0
dutgtyt
).(),( tgtg
.)()()(0
dutgtyt
)2.1(
28
Utilizando transformada de Laplace, tenemos que
(1.3)
donde
(1.4)
es conocida como la función de transferencia del sistema. Es decir, la función de transferencia del sistema se puede definir como la transformada de Laplace de la respuesta al impulso del sistema.
),()()( sUsGsY
0
)()( dtetgsG st
29
1.4 El concepto de estado
El estado de un sistema al tiempo se define como la (mínima) cantidad de información que junto con la entrada nos permite determinar de manera única el comportamiento del sistema para
0t),[ 0 tu
.0tt
30
Algunas características del concepto de estado:
• El concepto de estado se aplica a cualquier sistema dinámico (no solamente a sistemas lineales).
• La elección de las variables de estado no es única.
• El estado de un sistema puede o no tener un significado físico.
• El estado de un sistema puede consistir de un conjunto finito o infinito de números.
31
Sistemas a estudiar en el curso de Sistemas Lineales I:
sistemas dinámicos, lineales, invariantes en el tiempo, y de dimensión finita (y escalares).
32
2. Descripción de sistemas lineales en variables de estado
33
2.1 Representación de sistemas en variables de estado
El tipo de sistemas que estudiaremos son aquellos descritos por las siguientes ecuaciones
)),(),(()(
)),(),(()(
ttutxgty
ttutxhtx )1.2(
34
donde es el vector de estado, y sus componentes
son las variables de estado, es el vector de salidas,
y es el vector de entradas.
)(
)(
)(
)( 2
1
tx
tx
tx
tx
n
)(
)(
)(
)(2
1
ty
ty
ty
ty
p
)(
)(
)(
)( 2
1
tu
tu
tu
tu
m
35
Usaremos la notación
para indicar que el estado inicial y la entrada producen el estado x(t) y la salida y(t), para
},{}),({ ),[),[),[0 000 ttt yxutx
)( 0tx ),[ 0 tu.0tt
36
Un sistema se dice lineal si, dado que
entonces se cumple que
donde son números reales cualquiera.
}~,~{}~),(~{
},{}),({
),[),[),[0
),[),[),[0
000
000
ttt
ttt
yxutx
yxutx
}~,~{
}~),(~)({
),[2),[1),[2),[1
),[2),[10201
0000
00
tttt
tt
yyxx
uutxtx
21 y
37
La respuesta de un sistema lineal puede separarse en 2 partes:
Respuesta debida a
respuesta debida a respuesta debida a
respuesta a entrada cero respuesta a estado cero
}),({ ),[0 0tutx
}0),({ 0tx }.,0{ ),[ 0 tu
38
Si el sistema es lineal, las funciones h y g serán funciones lineales de x y u, es decir
donde A(t), B(t), C(t) y D(t) son matrices, respectivamente, de dimensiones
)()()()()(
)()()()()(
tutDtxtCty
tutBtxtAtx
.y , , , mpnpmnnn
)2.2(
39
Un sistema se dice invariante en el tiempo si, dado que
entonces se cumple
donde es el operador de retraso, y es un número real.
},{}),({ ),[),[),[0 000 ttt yxutx
},{}),({ ),[),[),[0 000 ttt yQxQuQtxQ
Q
40
Para sistemas invariantes en el tiempo, las matrices A(.), B(.), C(.) y D(.) no dependen del tiempo.
Por lo tanto, las ecuaciones en espacio de estado que describen el comportamiento de un sistema lineal e invariante en el tiempo son las siguientes
donde A,B,C y D son matrices constantes reales, respectivamen-te, de dimensiones
Por simplicidad, a menudo se hará referencia en este curso al sistema descrito por (2.3) como
)()()(
)()()(
tDutCxty
tButAxtx )3.2(
.y , , , mpnpmnnn
).,,,( DCBA
41
Se define el orden del sistema como el número de variables de estado, es decir, para la representación (2.3) el orden del sistema es igual a n.
42
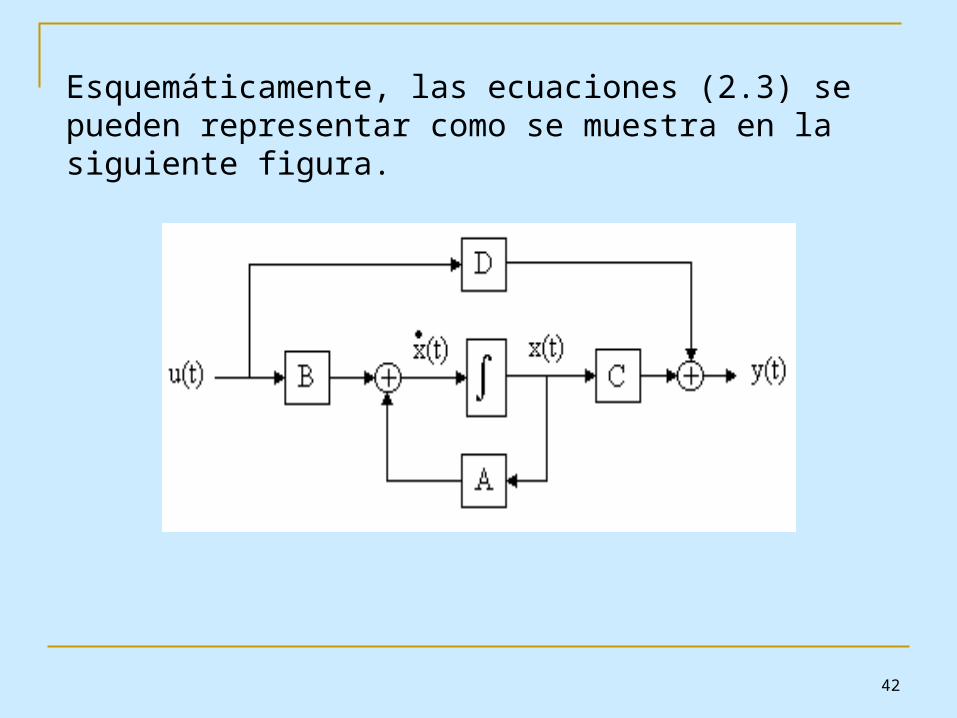
Esquemáticamente, las ecuaciones (2.3) se pueden representar como se muestra en la siguiente figura.
43
Tomando transformada de Laplace de (2.3) y denotando tenemos
De lo anterior, entonces
y multiplicando por la izquierda por la inversa de
,)0( 0xx
).()()(
)()()( 0
sDUsCXsY
sBUsAXxssX
),()()( 0 sBUxsXAsIn
).()()()( 10
1 sBUAsIxAsIsX nn
),( AsIn
44
La salida (vector de salidas) está dada por
Si entonces la salida estará dada por
Haciendo una comparación con la descripción entrada-salida, podemos ver que
es la función de transferencia del sistema.
).(])([)(
)()()()()(1
01
10
1
sUDBAsICxAsIC
sDUsBUAsICxAsICsY
nn
nn
,00 x
).(])([)( 1 sUDBAsICsY n )4.2(
DBAsICsG n 1)()( )5.2(
45
La función de transferencia G(s) de un sistema multivariable (matriz de transferencia) es una matriz cuyos elementos son funciones racionales y tiene tantas filas como salidas tiene el sistema y tantas columnas como entradas, es decir, es de dimensiones .mp
46
Una función racional g(s)=b(s)/a(s) se dice propia si y estrictamente propia si
Una matriz racional G(s) se dice propia (estrictamente propia) si todos sus elementos son funciones racionales propias (estrictamente propias).
),(deg)(deg sbsa ).(deg)(deg sbsa
47
La función de transferencia G(s) puede escribirse como
Cada elemento de es de grado estrictamente menor que el grado de por lo tanto es una matriz estrictamente propia.
Si D es diferente de cero, entonces
es una matriz propia (pero no estrictamente propia).
.)](Adj[)det(
1)( DBAsIC
AsIsG
)(Adj AsI ),(det AsI BAsIC 1)(
DBAsIC 1)(
48
Comparaciones entre las descripciones entrada-salida (descripción externa) y espacio de estado (descripción interna):
• La descripción entrada-salida muestra como están relaciona-das las entradas y salidas del sistema. No es aplicable si el sistema no está relajado, y no proporciona información sobre el comportamiento interno del sistema.
• Para algunos sistemas puede ser muy complicado obtener la descripción en espacio de estado. La función de transferencia puede obtenerse por mediciones directas.
49
• Los resultados obtenidos para sistemas multivariables usando espacio de estado pueden también obtenerse usando el enfoque de función de transferencia.
• Espacio de estado permite estudiar sistemas no lineales y sistemas variantes en el tiempo.
• Ambas descripciones tienen sus méritos y pueden utilizarse de manera conjunta.
50
Sistemas discretos
Para este tipo de sistemas, las señales involucradas toman valores en ciertos instantes de tiempo.
La salida de un sistema lineal discreto, causal, invariante en el tiempo y relajado, está dada por
donde g(k-m) es la respuesta del sistema debido a la entrada
k
m
kmumkgky0
,...2,1,0 ),()()(
. ,0
,1)(
mi
miiu
51
La descripción en variables de estado para sistemas discretos está dada por
).()()(
)()()1(
kDukCxky
kBukAxkx
52
2.2 Solución de la ecuación de estado
Nos interesa encontrar la solución de la ecuación de estado
,0 ),( ttx
).()()( tButAxtx
)6.2(
53
Parte homogénea, caso escalar:
Solución:
).()( taxtx
).0()0()
!1
!1
21
1()(
0
22 xex
tak
e
tak
taattx at
k
kkat
kk
)7.2(
)8.2(
54
Parte homogénea, caso matricial:
Solución:
(2.10)
donde
(2.11)
es una matriz de dimensiones que por analogía con el caso escalar es conocida como matriz exponencial.
).()( tAxtx
)0()!
121
()( 22 x
e
tAk
tAAtItx
At
kk
),0()( xetx At
0 !1
:k
kkAt tAk
e
,nn
)9.2(
55
Propiedades de la matriz exponencial:
. entonces , si )
singular no es ,)( )
)
)
)(
1
)(
BtAttBA
AtAtAt
ArAtrtA
AtAtAt
eeeBAABiv
eeeiii
eeeii
AeAeedtd
i
56
La matriz exponencial en forma “cerrada” está dada por
(2.12)
Métodos para encontrar la matriz exponencial
1) Por la formula de expansión (2.11).
2) Por la transformada inversa de Laplace (2.12).
3) Por diagonalización o reducción a forma de Jordan de la matriz A.
4) Por interpolación de Sylvester.
5) Utilizando programas computacionales (Maple, función “exponential (A,t)”).
}.){( 11 AsIeAt L
:Ate
57
Observe que en la matriz exponencial aparecen términos de la forma donde es raíz de
El polinomio
(2.13)
se conoce como polinomio característico del sistema.
Las raíces del polinomio característico las cuales corresponden a los valores propios de la matriz A, se conocen como los modos del sistema.
Ate,te ).det( AsI
nnnn asasasAsIsa 2
21
1)det()(
),det()( AsIsa
58
Matriz de transición de estados
Se puede expresar la solución de la ecuación en la forma
donde es una matriz de dimensiones conocida como la matriz de transición de estados del sistema, y es la solución única de
De lo que se ha visto anteriormente,
)()( tAxtx
),0()()( xttx
)(t ,nn
.)0( ),()( ItAt
}.){()( 11 AsIet At L
)15.2(
)14.2(
59
Propiedades de la matriz de transición de estados:
).()()()()( )
)()]([ )
)()()()()( )
)()( )]([)()( )
)0( )
1201020112
1221)(
21
111
)0(
2121
ttttttttttv
nttiv
tttteeettiii
ttteetii
Iei
n
AtAtttA
AtAt
A
60
Solución de la ecuación de estado
Usando transformada de Laplace y despejando, tenemos que
y como entonces
).()()( tButAxtx
),()()0()()( 11 sBUAsIxAsIsX
},{)( 1 AteAsI L
).(}{)0(}{)( sBUexesX AtAt LL
61
Tomando transformada inversa de Laplace y usando convolución, entonces
(2.16)
mientras que la salida del sistema será
(2.17)
t tAAt dBuexetx0
)( )()0()(
).()()( tDutCxty
62
2.3 Representaciones canónicas
Suponga que se quiere obtener una representación en espacio de estado de la ecuación diferencial
(2.18).
123321
.........ubububyayayay
63
Introduciendo una variable auxiliar esta ecuación puede escribirse de manera equivalente como
,
...
......
123
321
bbby
uaaa)19.2(
64
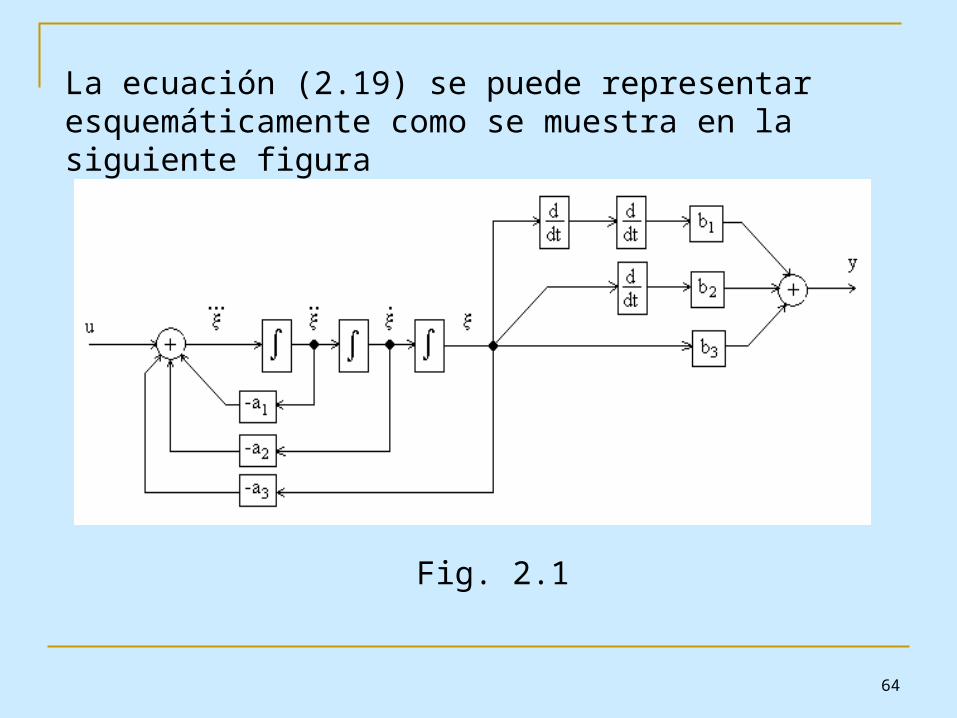
La ecuación (2.19) se puede representar esquemáticamente como se muestra en la siguiente figura
Fig. 2.1
65
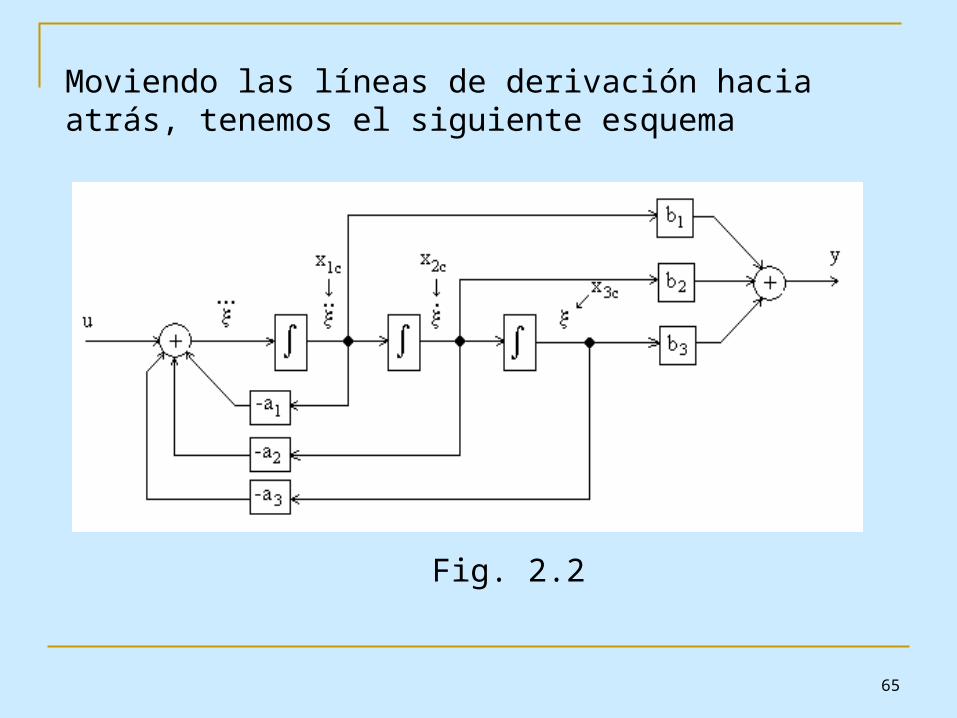
Moviendo las líneas de derivación hacia atrás, tenemos el siguiente esquema
Fig. 2.2
66
Forma canónica controlador:
.332211
23
12
3322111
ccc
cc
cc
cccc
xbxbxby
xx
xx
uxaxaxax
.
.
.
67
En forma matricial
donde
,cc
cccc
xcy
ubxAx
.
0
0
1
,
010
001
321
321
bbbc
b
aaa
A
c
cc
68
La ecuación (2.18)
también puede escribirse en la forma
.
123
321
...
. .....
ubububm
myayayay )20.2(
.... .....ubububyayayay 123321
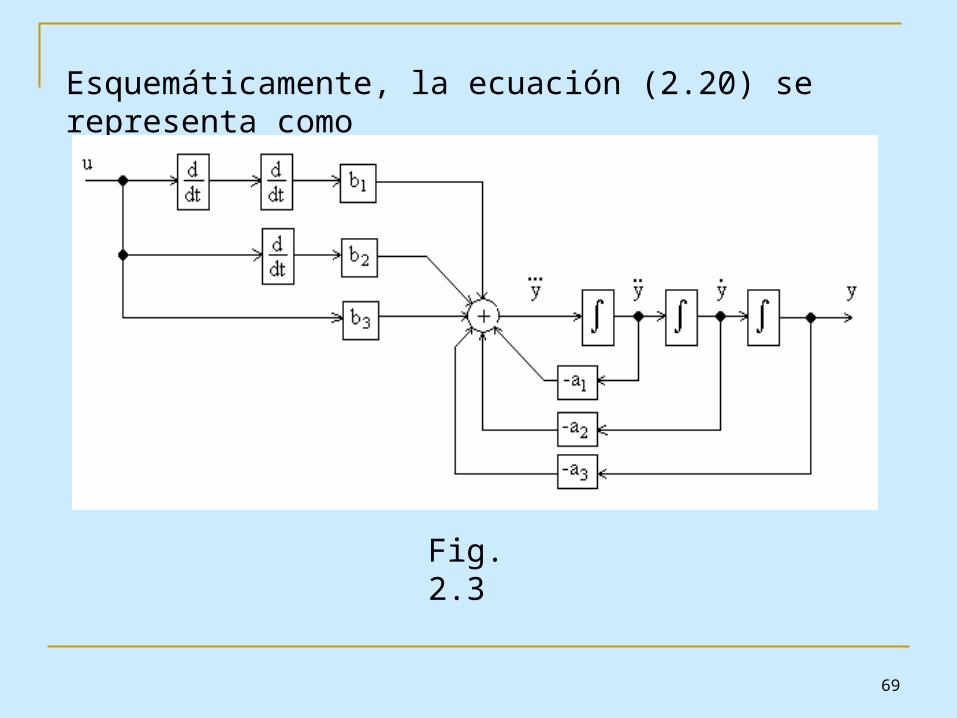
69
Esquemáticamente, la ecuación (2.20) se representa como
Fig. 2.3
70
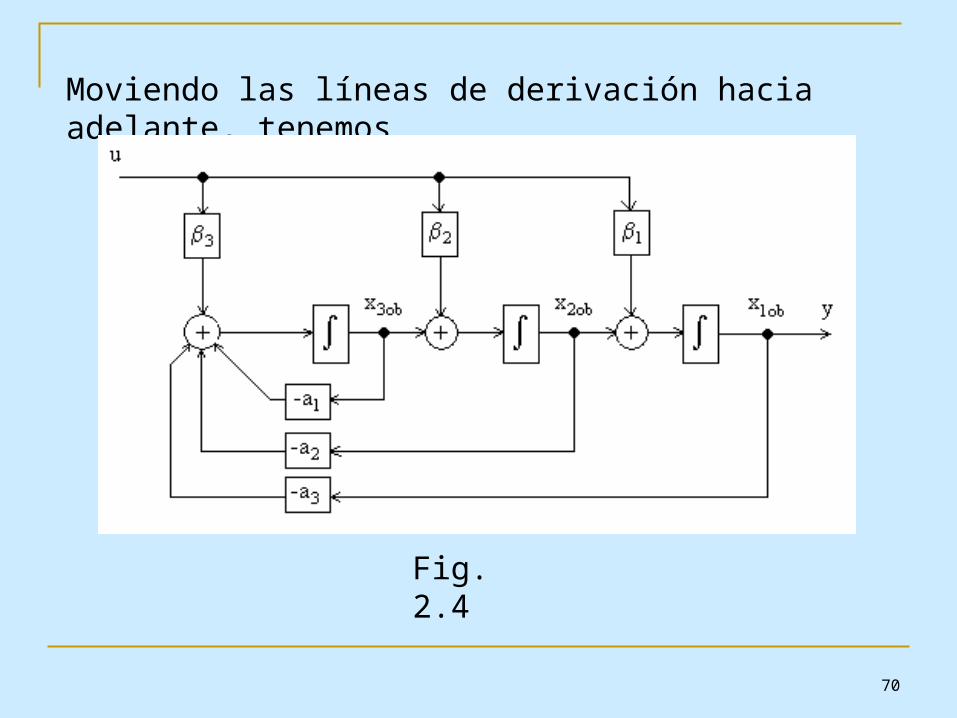
Moviendo las líneas de derivación hacia adelante, tenemos
Fig. 2.4
71
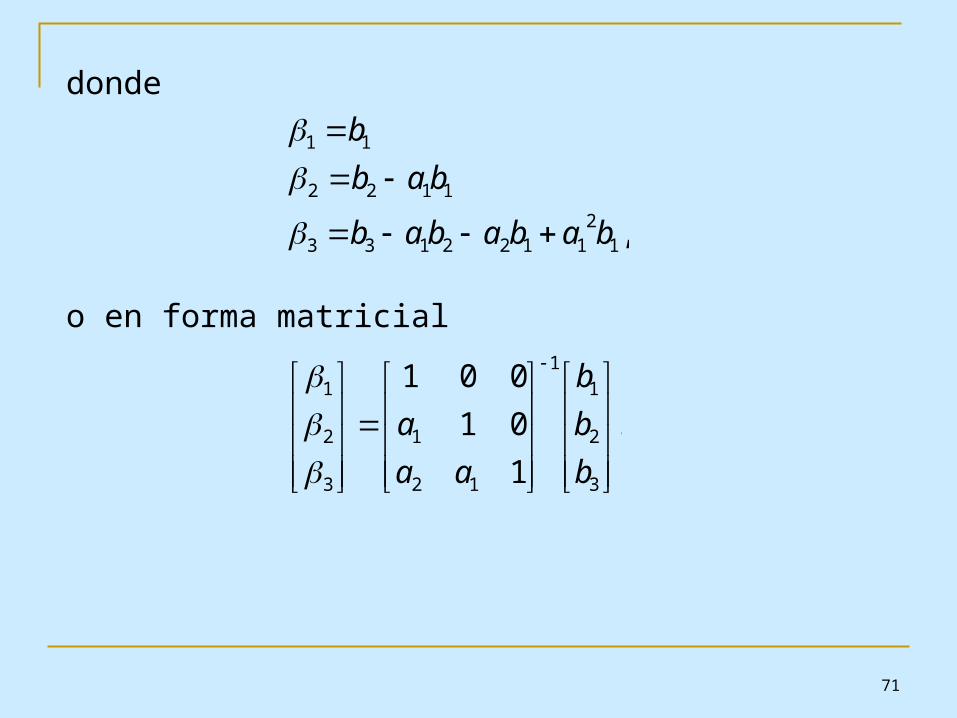
donde
o en forma matricial
,12
1122133
1122
11
bababab
bab
b
.
1
01
001
3
2
1
1
12
1
3
2
1
b
b
b
aa
a
72
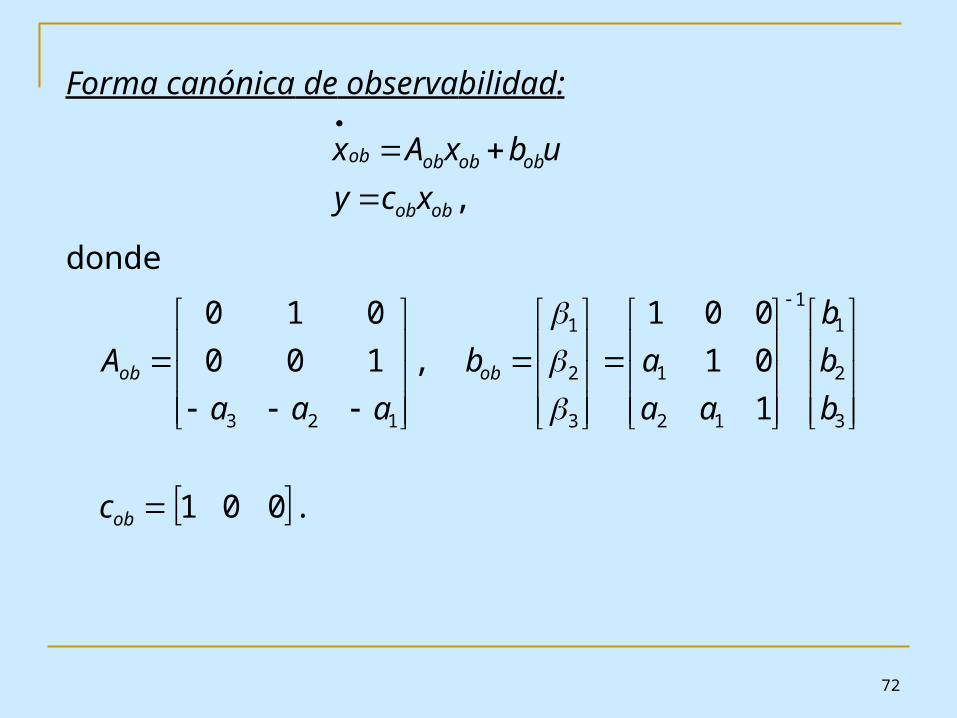
Forma canónica de observabilidad:
donde
,obob
obobobob
xcy
ubxAx
.001
1
01
001
,100
010
3
2
1
1
12
1
3
2
1
123
ob
obob
c
b
b
b
aa
ab
aaa
A

73
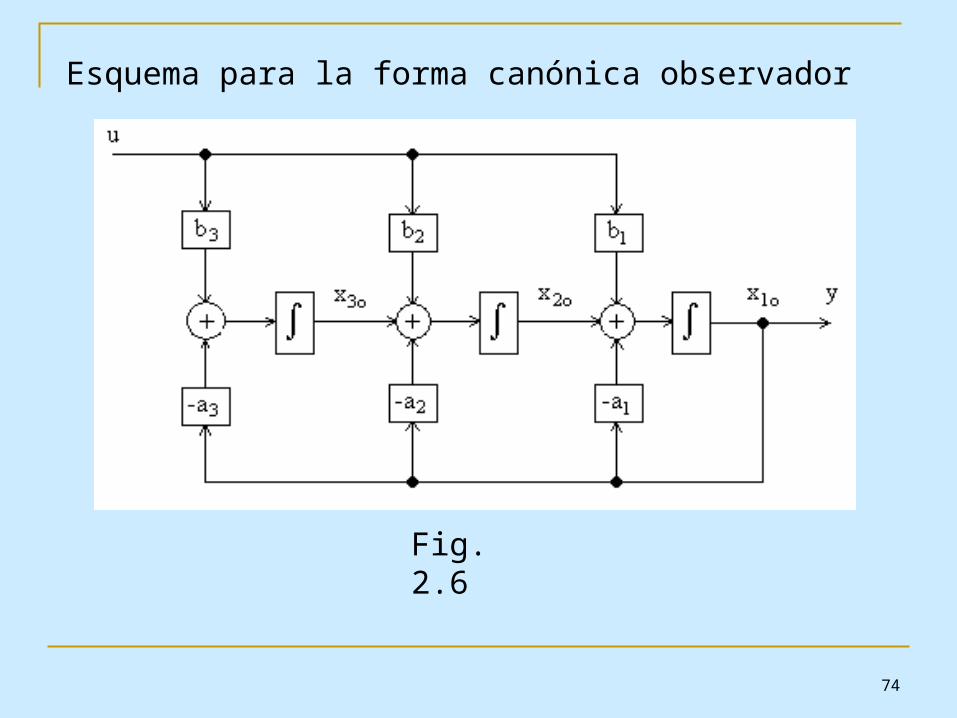
Para obtener otras 2 representaciones de la ecuación (2.18), en lugar de implementar la ecuación como se hizo anteriormente, se utiliza el siguiente esquema
de lo cual resultan las formas canónicas observador y controlabilidad, que se muestran a continuación.
Fig. 2.5
uaaa 321
. .....
74
Esquema para la forma canónica observador
Fig. 2.6
75
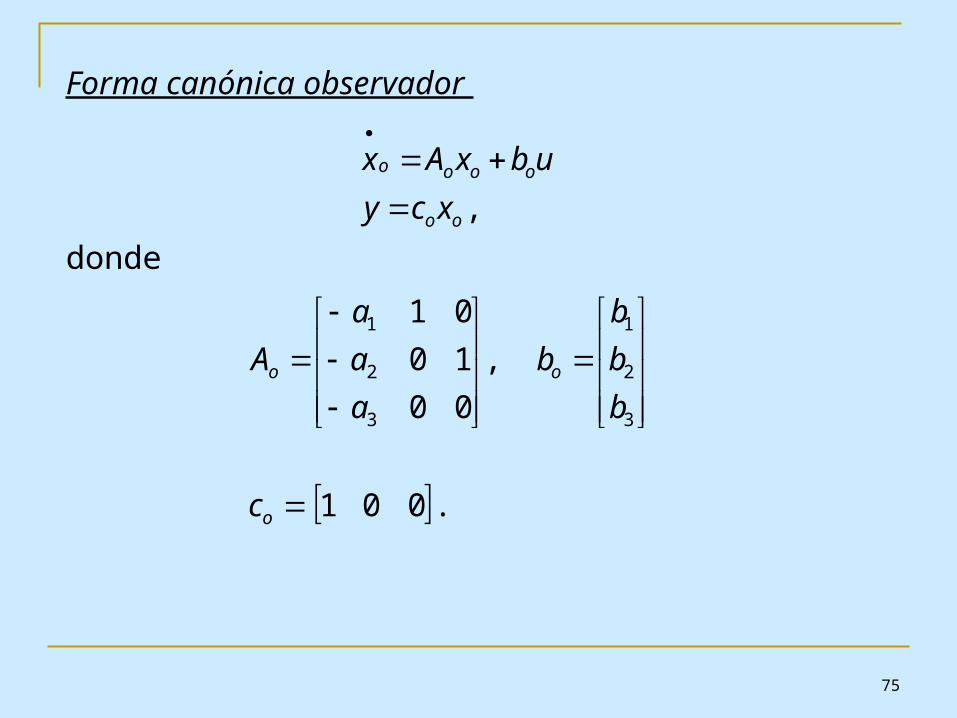
Forma canónica observador
donde
,oo
oooo
xcy
ubxAx
.001
,
00
10
01
3
2
1
3
2
1
o
oo
c
b
b
b
b
a
a
a
A
76
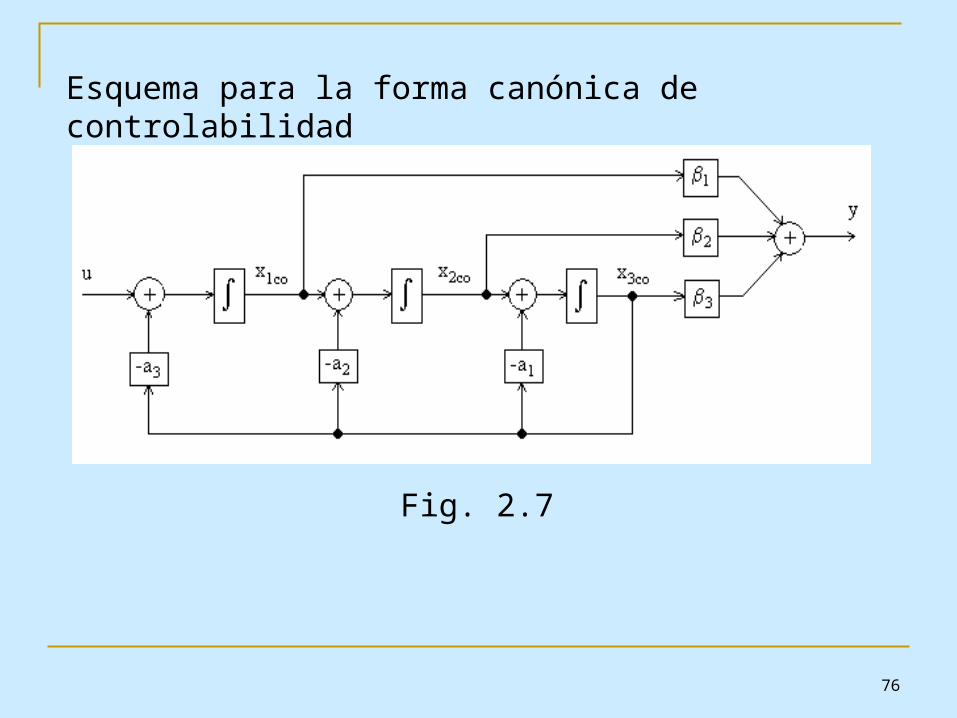
Esquema para la forma canónica de controlabilidad
Fig. 2.7
77
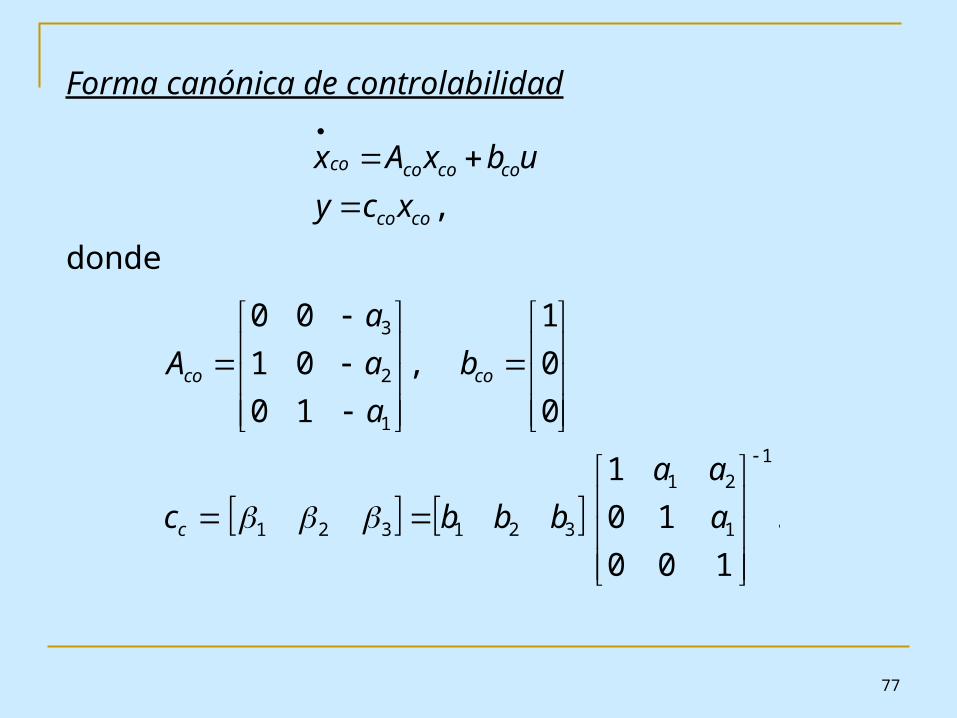
Forma canónica de controlabilidad
donde
,coco
cocococo
xcy
ubxAx
.
100
10
1
0
0
1
,
10
01
00
1
1
21
321321
1
2
3
a
aa
bbbc
b
a
a
a
A
c
coco
78
Observe de estas representaciones canónicas, que
. , ,
, ,
Tcoob
Tcoob
Tcoob
Tco
Tco
Tco
bccbAA
bccbAA
79
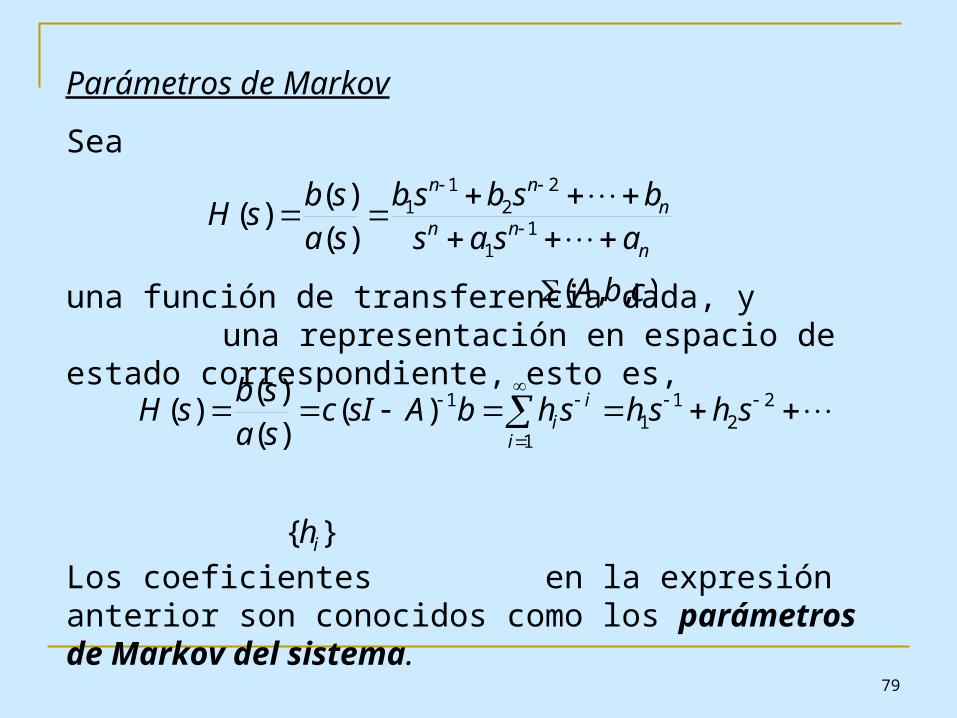
Parámetros de Markov
Sea
una función de transferencia dada, y una representación en espacio de estado correspondiente, esto es,
Los coeficientes en la expresión anterior son conocidos como los parámetros de Markov del sistema.
nnn
nnn
asasbsbsb
sasb
sH
11
22
11
)()(
)(
1
22
11
1)()()(
)(i
ii shshshbAsIc
sasb
sH
}{ ih
),,( cbA
80
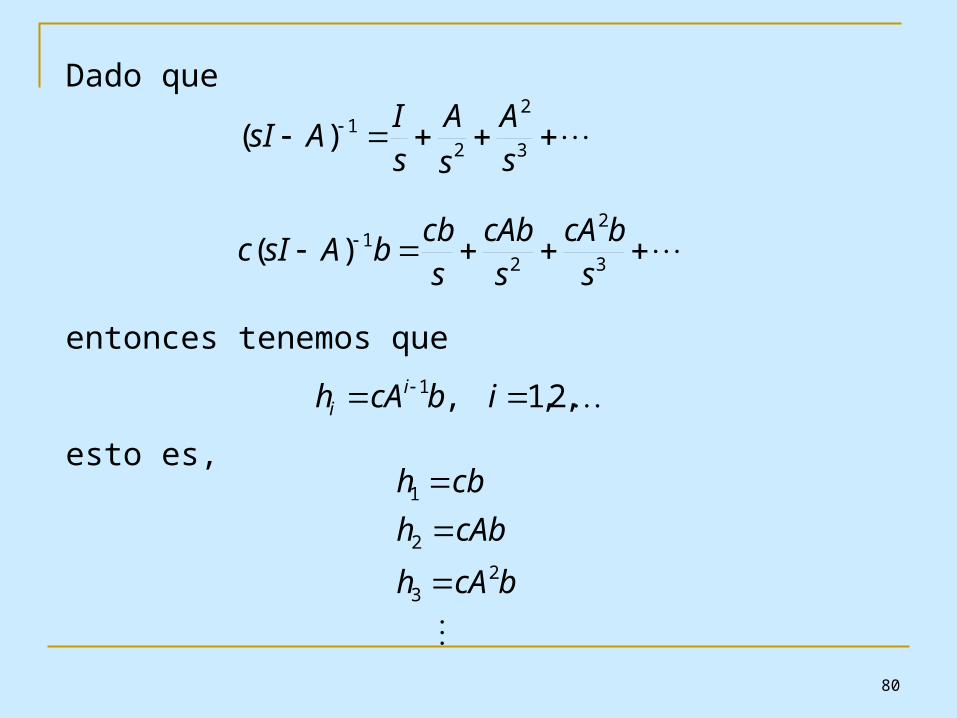
Dado que
entonces tenemos que
esto es,
3
2
21
3
2
21
)(
)(
sbcA
scAb
scb
bAsIc
sA
s
AsI
AsI
,2,1 ,1 ibcAh ii
23
2
1
bcAh
cAbh
cbh
81
Observe que:
• Los parámetros de Markov son propios de la función de transferencia, esto es, no dependen de la representación de H(s).
• Los coeficientes que aparecen en las formas canónicas de observabilidad y controlabilidad corresponden a los primeros n parámetros de Markov del sistema, esto es,
,,,1 , nii
.,,1 , nih ii
),,( cbA
82
Si hacemos una expansión en fracciones parciales de H(s),
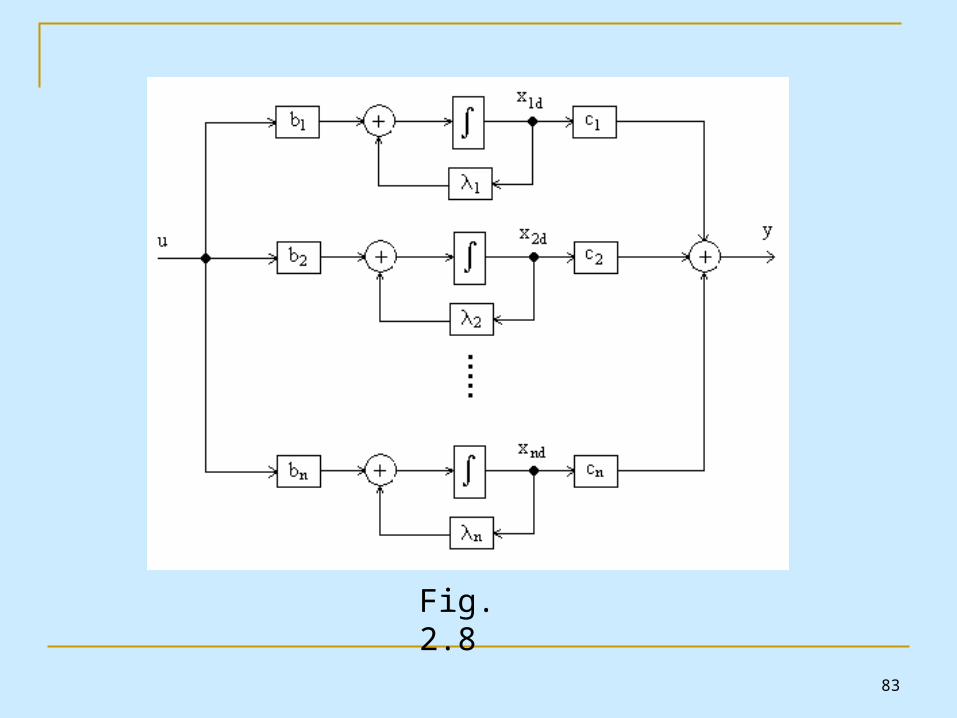
(suponiendo que las raíces de a(s) son distintas), podemos obtener una representación en forma canónica diagonal, como se muestra esquemáticamente en la siguiente figura.
n
i i
i
sg
sasb
sH1)(
)()(
83
Fig. 2.8
84
Forma canónica diagonal:
donde
y
,dd
dddd
xcy
ubxAx
,
},,,,{diag
1
1
21
nd
n
dnd
ccc
b
b
bA
.,,1 , nigcb iii
85
2.4 Transformaciones de similitud
Sea
una representación de un sistema en espacio de estado, y hágase el cambio de variables
donde T es una matriz no singular cualquiera.
)()(
)()()(
tcxty
tbutAxtx
)()( txTtx
86
Entonces, otra descripción en espacio de estado del mismo sistema está dada por
)()()(
)()()()()( 11
txctxc
cTty
tubtxAtub
bTtx
A
ATTtx
lo cual se conoce como una transformación de similitud.
Entonces, 2 representaciones en espacio de estado y se dicen similares si existe una matriz no singular T
tal que
. , , 11 cTcbTbATTA
),,( cbA),,( cbA
87
Lema 2.1. Los modos de un sistema son invariantes bajo transformaciones de similitud.
Lema 2.2. La función de transferencia de un sistema es invariante bajo transformaciones de similitud.
88
2.5 Interpretación dinámica de polos y ceros
Sea H(s) la función de transferencia del sistema
esto es,
)()(
)()()(
tcxty
tbutAxtx
.)()(
)()( 1
sasb
bAsIcsH
89
Un número (real o complejo) es un cero de H(s) si y es un polo de H(s) si
Dos polinomios a(s) y b(s) se dicen coprimos o primos relativos si no tienen raíces en común.
La función de transferencia H(s)=b(s)/a(s) se dice irreducible si a(s) y b(s) son coprimos.
Observe que si H(s) es irreducible, entonces cada raíz de b(s) es un cero de H(s), y cada raíz de a(s) es un polo de H(s).
,0)( H.)(lim sHs
90
Teorema 2.1. Sea
una representación en espacio de estado de un sistema, con función de transferencia H(s)=b(s)/a(s), y donde Si la entrada aplicada al sistema es de la forma donde no es un polo de H(s), entonces la salida del sistema debido a esta entrada y a la condición inicial está dada por
Corolario 2.1. Si es un cero de H(s), entonces la salida del sistema y(t) debido a la entrada y a la condición inicial es cero para
)()(
)()()(
tcxty
tbutAxtx
).(deg san ,)( tetu
bAIx 1)()0(
.0 ,)()( teHty t
tetu )(
bAIx 1)()0( .0t
91
Teorema 2.2. El número es un polo de H(s) si y solo si existe un estado inicial x(0), tal que la respuesta a entrada-cero del sistema está dada por
donde r es una constante diferente de cero.
,0 ,)( trety t
92
3. Controlabilidad y observabilidad
93
3.1 Controlabilidad
Sea un sistema (escalar) dado en su representación en espacio de estado
).()(
)()()( ),,(tcxty
tbutAxtxcbA.
Sean puntos cualquiera del espacio de estado. Se dice que el sistema es controlable al tiempo si existe una entrada u(t) que transfiere al tiempo
)(y )( 10 txtx
.1t)( a )( 10 txtx
),,( cbA 0t
94
A continuación se derivarán las condiciones bajo las cuales un sistema es controlable.
La solución de la ecuación de estado (con ) está dada por
Al tiempo
00t
.)()0()(0
)( t tAAt dbuexetx
1t
.)()0()( 1 11
0
)(1
t tAAt dbuexetx
),,( cbA
95
Usando la fórmula de interpolación de Sylvester para la matriz exponencial
se obtiene
1
0
)(n
k
kk
At Ate
.)()( )0()( 11
0 1
1
01
t
k
n
k
kAt dutbAxetx
96
Definiendo
tenemos que
La ecuación anterior puede escribirse como
1
0 1 )()(:t
kk dutw
k
n
k
kAt wbAxetx
1
01 )0()( 1
. )0()(
1
1
0
11
1
n
nAt
w
w
w
bAAbbxetx
97
Para que tenga solución la ecuación anterior, es necesario que
y como son vectores cualquiera, entonces debe de cumplirse que las columnas de la matriz
sean linealmente independientes.
Im )0()( 11
1 bAAbbxetx nAt
)(y )( 10 txtx
1bAAbb n
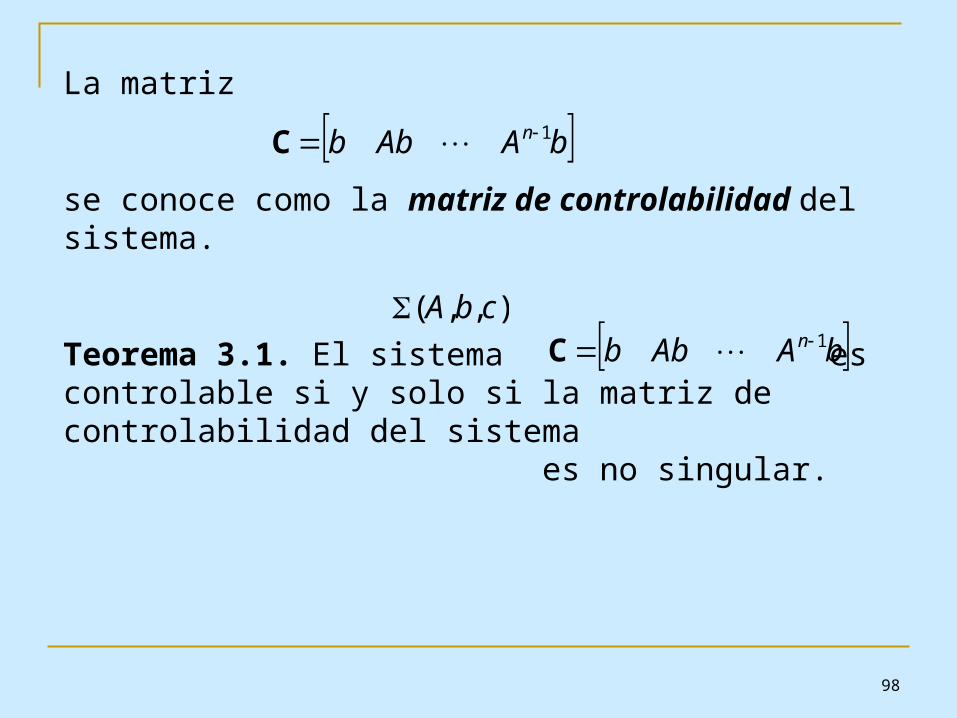
98
La matriz
se conoce como la matriz de controlabilidad del sistema.
Teorema 3.1. El sistema es controlable si y solo si la matriz de controlabilidad del sistema es no singular.
1bAAbb n C
bAAbb n 1 C
),,( cbA
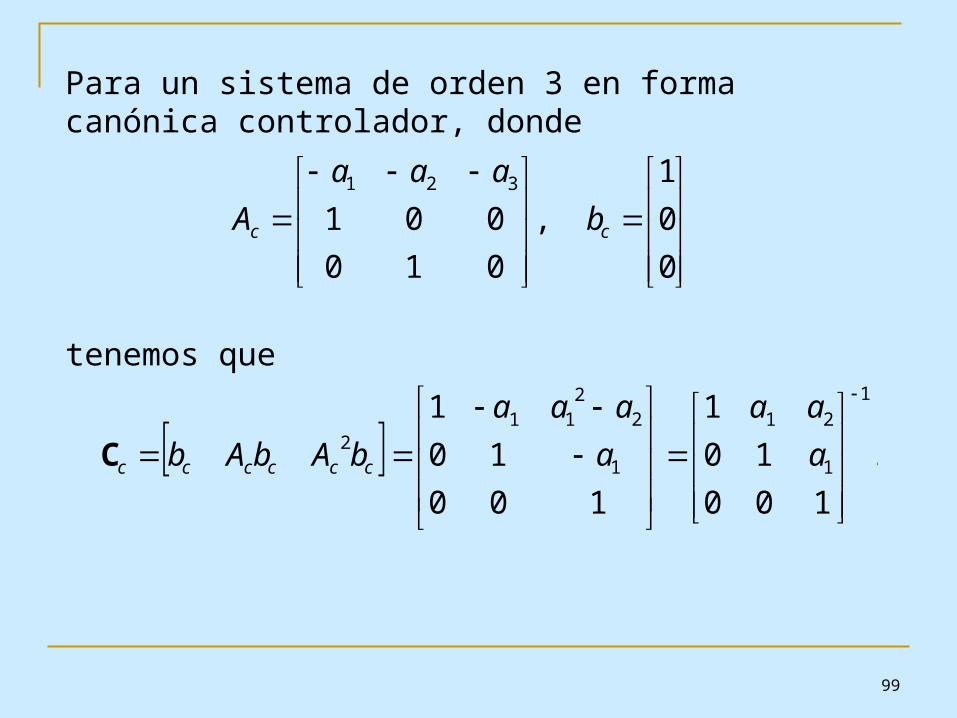
99
Para un sistema de orden 3 en forma canónica controlador, donde
tenemos que
0
0
1
,
010
001321
cc b
aaa
A
.
100
10
1
100
10
11
1
21
1
22
112
a
aa
a
aaa
bAbAb ccccccC
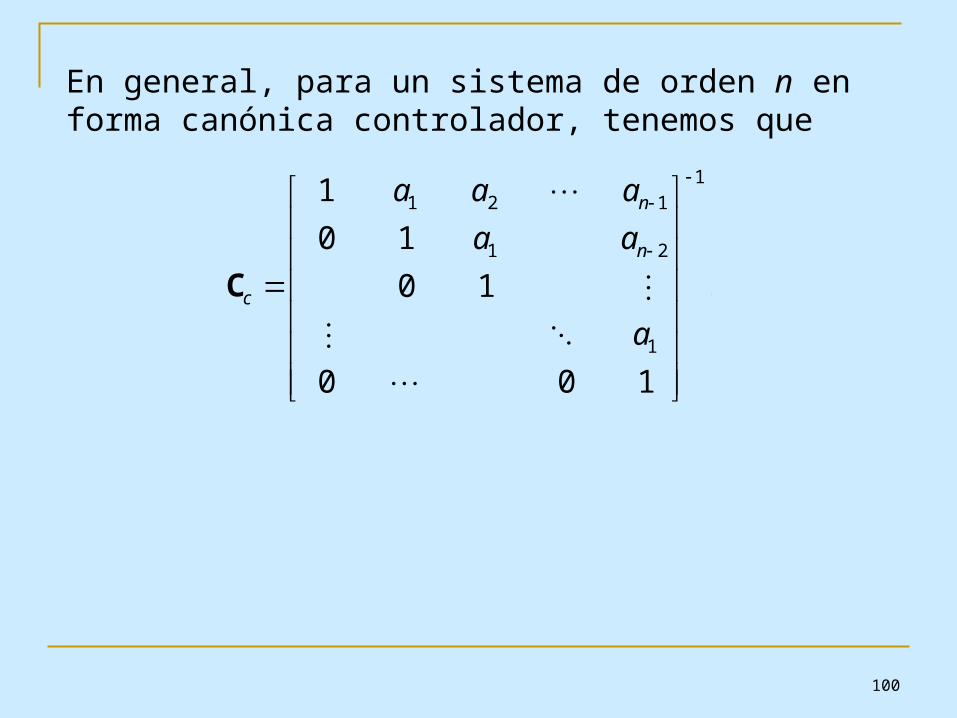
100
En general, para un sistema de orden n en forma canónica controlador, tenemos que
.
100
10
10
11
1
21
121
a
aa
aaa
n
n
cC
101
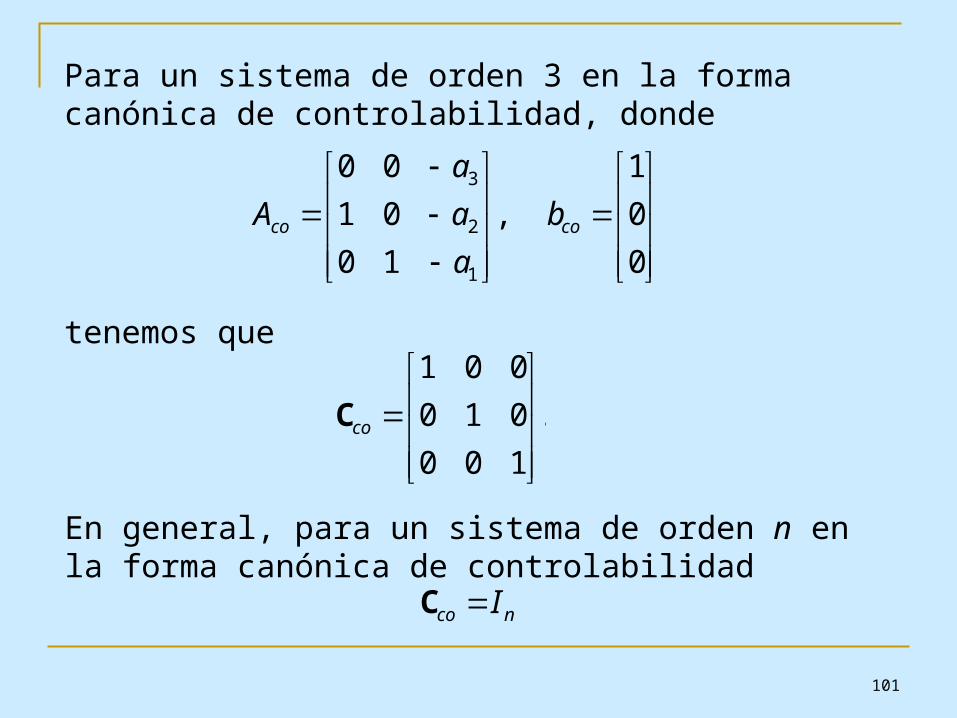
Para un sistema de orden 3 en la forma canónica de controlabilidad, donde
tenemos que
0
0
1
,
10
01
00
1
2
3
coco b
a
a
a
A
.
100
010
001
coC
.nco IC
En general, para un sistema de orden n en la forma canónica de controlabilidad
102
Controlabilidad de sistemas discretos.
Para el sistema discreto
tenemos que
)()(
)()()1(
kcxky
kbukAxkx
)1()0()0()(
)2()1()0()0()2()2()3(
)1()0()0()1()1()2(
)0()0()1(
1
23
2
nbubuAxAnx
buAbubuAxAbuAxx
buAbuxAbuAxx
buAxx
nn
103
Por lo tanto
Entonces, se puede transferir el estado de x(0) a x(n) si y solo si
la matriz es no singular.
.
)0(
)2(
)1(
)0()( 1
u
nu
nu
bAAbbxAnx nn
bAAbb n 1
104
El sistema se dice alcanzable si existe una entrada que transfiere la condición inicial x(0)=0 a cualquier estado x(n).
El sistema se dice controlable si existe una entrada que transfiere una condición inicial x(0) cualquiera al punto cero.
Teorema 3.2. El sistema discreto (A,b,c) es alcanzable si y solo
si la matriz es no singular. bAAbb n 1
105
Observe que:
• La no singularidad de la matriz es condición suficiente para alcanzar el origen, pero no es necesaria.
• Alcanzabilidad implica controlabilidad.
• Para sistemas continuos, ambos conceptos son equivalentes.
bAAbb n 1
106
3.2 Observabilidad
El sistema se dice observable al tiempo si es posible determinar el estado a partir del conocimiento de la entrada u(t) y de la salida y(t) en un intervalo finito de tiempo.
,0t)( 0tx
),,( cbA
107
Las condiciones bajo las cuales el sistema es observable se pueden obtener como se indica a continuación.
Considerando la salida del sistema y(t) y sus derivadas, tenemos que
).()()()(
)()()()()()(
)()()()(
)()(
)2(21)1(
2
tcbutbucAtxcAty
tucbtcAbutxcAtucbtxcAty
tcbutcAxtxcty
tcxty
nnnn
.....
..
),,( cbA
108
Lo anterior se puede escribir en forma matricial como
)(
)(
)(
)(
)(
0
0
0
)(
)(
)(
)(
)(
)(
)1(
21
2
)1(
t
tu
tu
tu
tu
bcA
cbcAb
cb
tx
cA
cA
cA
c
t
ty
ty
ty
ty
nnnn
UTY
..
.
..
.
O
109
En t=0, tenemos
Con el conocimiento de el estado x(0) puede ser determinado de manera única si las columnas de la matriz son linealmente independientes, esto es, si es no singular, en cuyo caso tendremos que
).0()0()0( xO TUY
)].0()0([)0( 1 TUY Ox
),0(y )0( UYO
O
110
La matriz
se conoce como la matriz de observabilidad del sistema.
Teorema 3.3. El sistema es observable si y solo si la matriz de observabilidad es no singular.
1ncA
cA
c
O
),,( cbA
111
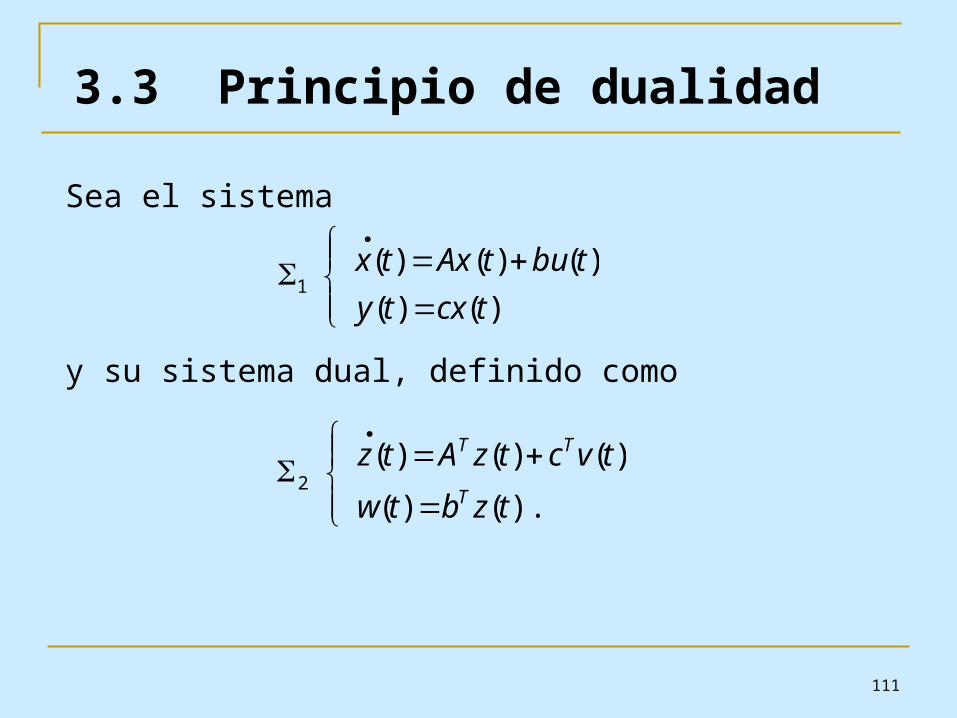
3.3 Principio de dualidad
Sea el sistema
y su sistema dual, definido como
)()(
)()()( 1
tcxty
tbutAxtx.
).()(
)()()( 2
tzbtw
tvctzAtzT
TT.
112
Entonces:
• El sistema es controlable si y solo si es observable.
• El sistema es observable si y solo si es controlable.
1 2
1 2
113
3.4 Representaciones mínimas
La representación en espacio de estado de un sistema se dice que es una representación mínima o realización mínima si no existe otra representación de orden menor, y tal que
),,( 111 cbA
.)()( 11
111 bAsIcbAsIc
),,( cbA
114
Lema 3.1. Si una función de transferencia
tiene una representación de orden n controlable y observable, entonces todas las representaciones de orden n de H(s) son también controlables y observables.
Lema 3.2. La forma canónica controlador de orden n de es observable si y solo si a(s) y
b(s) son coprimos.
nnn
nn
asasbsb
sasb
sH
11
11
)()(
)(
),( deg ),(/)()( sansasbsH
115
De los 2 resultados anteriores, tenemos que:
Teorema 3.4. La función de transferencia H(s)=b(s)/a(s) es irreducible (esto es, a(s) y b(s) son coprimos) si y solo si todas las representaciones de orden n de H(s), son controlables y observables.
Teorema 3.5. La representación es mínima si y solo si los polinomios
son coprimos.
),( deg san
bAsIcsbAsIsa )(Adj:)(y )det(:)(
),,( cbA
116
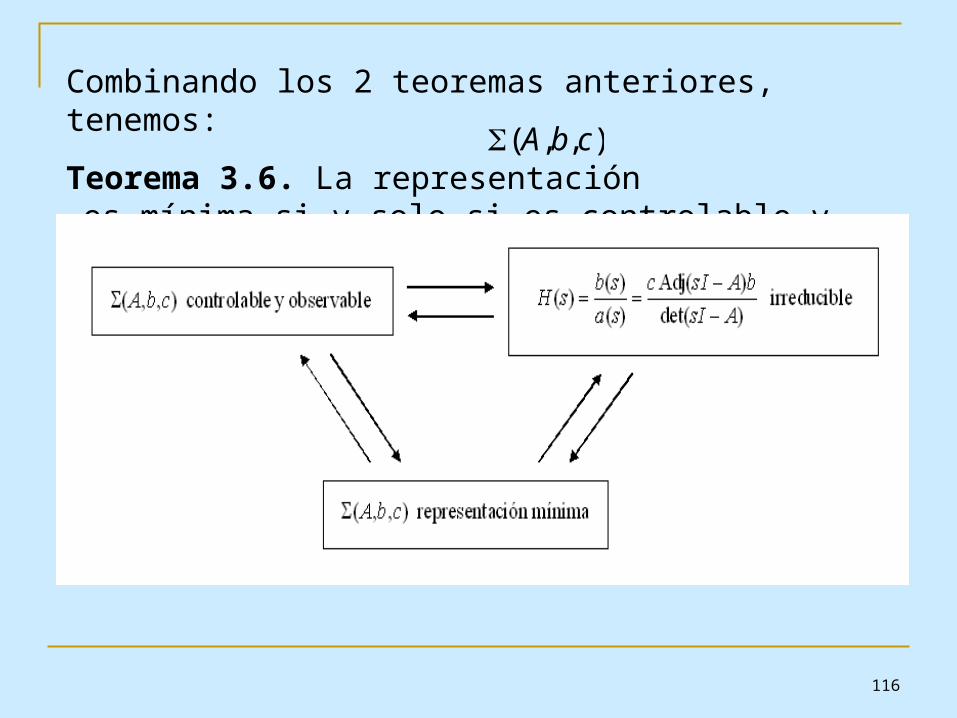
Combinando los 2 teoremas anteriores, tenemos:
Teorema 3.6. La representación es mínima si y solo si es controlable y observable.
),,( cbA
117
3.5 Transformaciones de similitud a formas canónicas
Lema 3.3. Sea una representación en espacio de estado dada y otra representación en la forma canónica controlador, ambas con el mismo orden, polinomio característico y función de transferencia.
Entonces, ambas representaciones son similares si y solo si e.controlabl es ),,( cbA
),,( cbA),,( ccc cbA
118
Lema 3.4. Sea una representación en espacio de estado dada y otra representación en la forma canónica observador, ambas con el mismo orden, polinomio característico y función de transferencia.
Entonces, ambas representaciones son similares si y solo si
),,( cbA
.observable es ),,( cbA
),,( ooo cbA
119
Lema 3.5. Sean dos representaciones en espacio de estado del mismo orden y con la misma función de transferencia. Estas representaciones son similares si
1)
2) ambas representaciones son controlables o ambas son observables.
Si ambas son controlables, la transformación que lleva de una a otra es
y si ambas son observables
),,(y ),,( 222111 cbAcbA
y ),det()det( 21 AsIAsI
),(),( ),()( 221
1121 bAbATtTxtx CC
).,(),( ),()( 22111
21 AcAcTtTxtx OO
120
3.6 Representación de sistemas no controlables/ no observables
Sistemas no controlables
Sea un sistema no controlable de orden n, con
Existe una transformación de similitud T, tal que la representación con
.),( rango nrbA C
cTcbTbATTA , , 11
),,,( cbA
),,( cbA
121
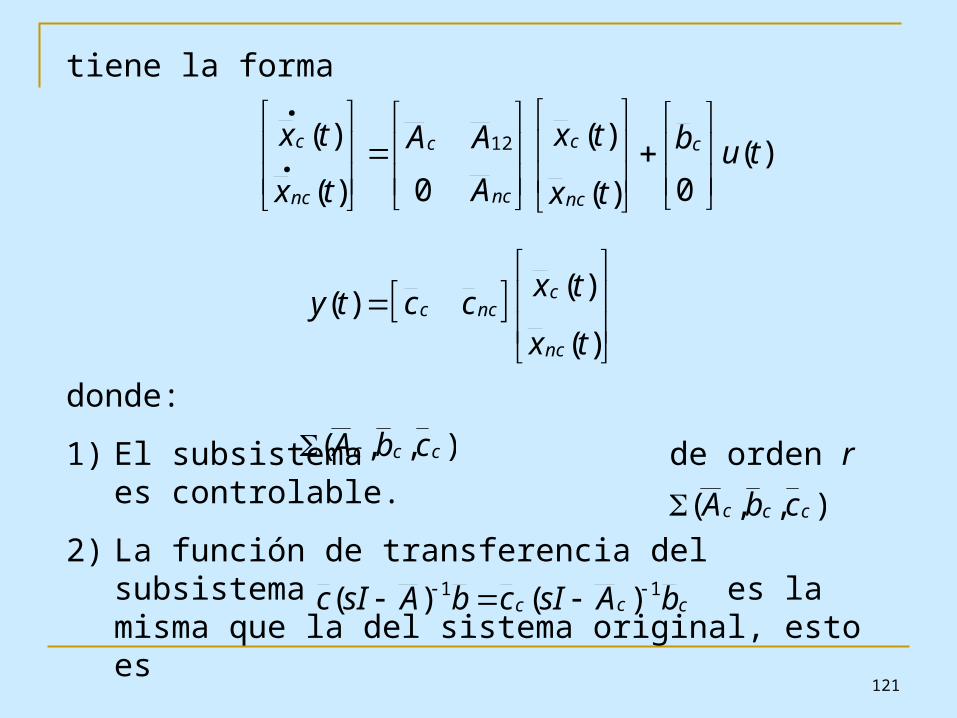
tiene la forma
donde:
1) El subsistema de orden r es controlable.
2) La función de transferencia del subsistema es la misma que la del sistema original, esto es
)(
)()(
)(0)(
)(
0)(
)( 12
tx
txccty
tub
tx
tx
A
AA
tx
tx
nc
cncc
c
nc
c
nc
c
nc
c.
.
),,( ccc cbA
),,( ccc cbA
.)()( 11ccc bAsIcbAsIc
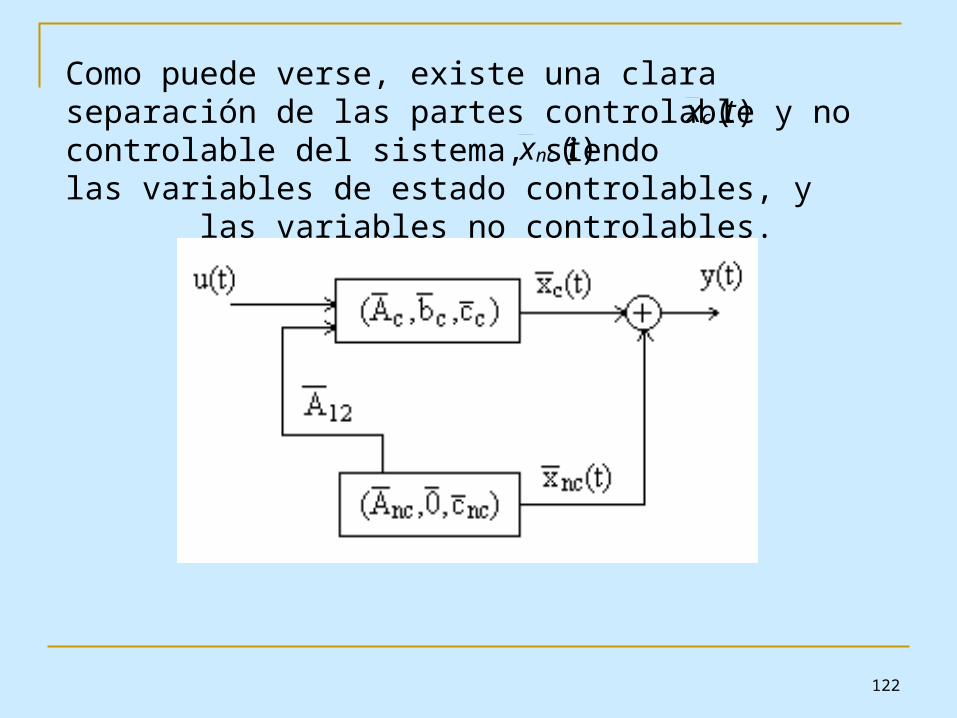
122
Como puede verse, existe una clara separación de las partes controlable y no controlable del sistema, siendo las variables de estado controlables, y las variables no controlables.
)(txc
)(txnc
123
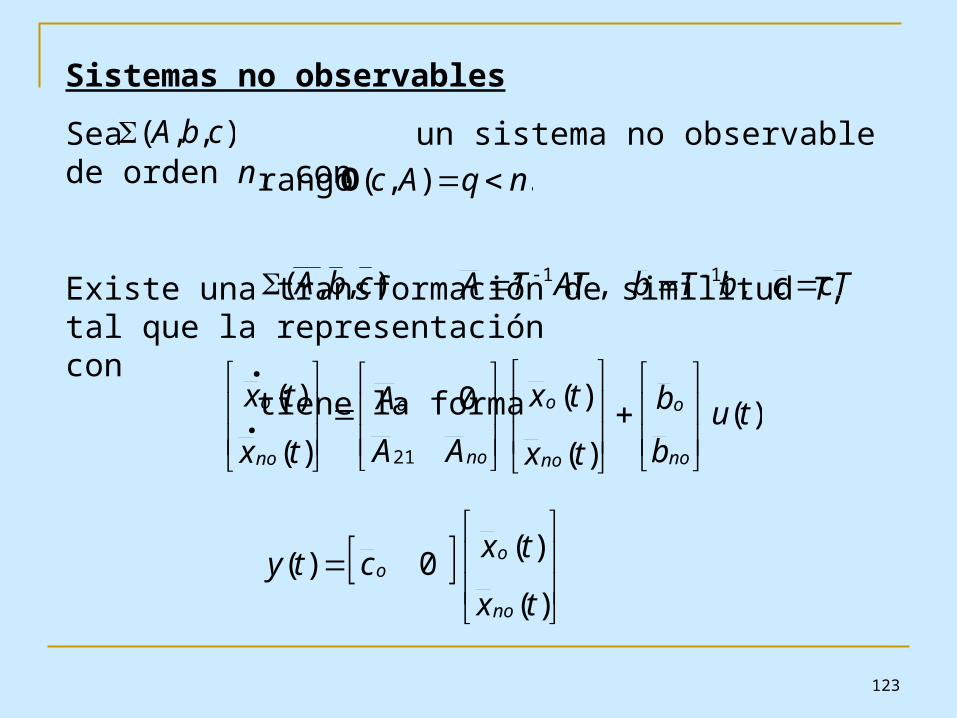
Sistemas no observables
Sea un sistema no observable de orden n, con
Existe una transformación de similitud T, tal que la representación con tiene la forma
.),( rango nqAc O
cTcbTbATTA , , 11
)(
)(0)(
)()(
)(0
)(
)(
21
tx
txcty
tub
b
tx
tx
AA
A
tx
tx
no
oo
no
o
no
o
no
o
no
o.
.
),,,( cbA
),,( cbA
124
donde
1) El subsistema de orden q es observable.
2) La función de transferencia del subsistema es la misma que la del sistema original, esto es
),,( ooo cbA
),,( ooo cbA
.)()( 11ooo bAsIcbAsIc
125
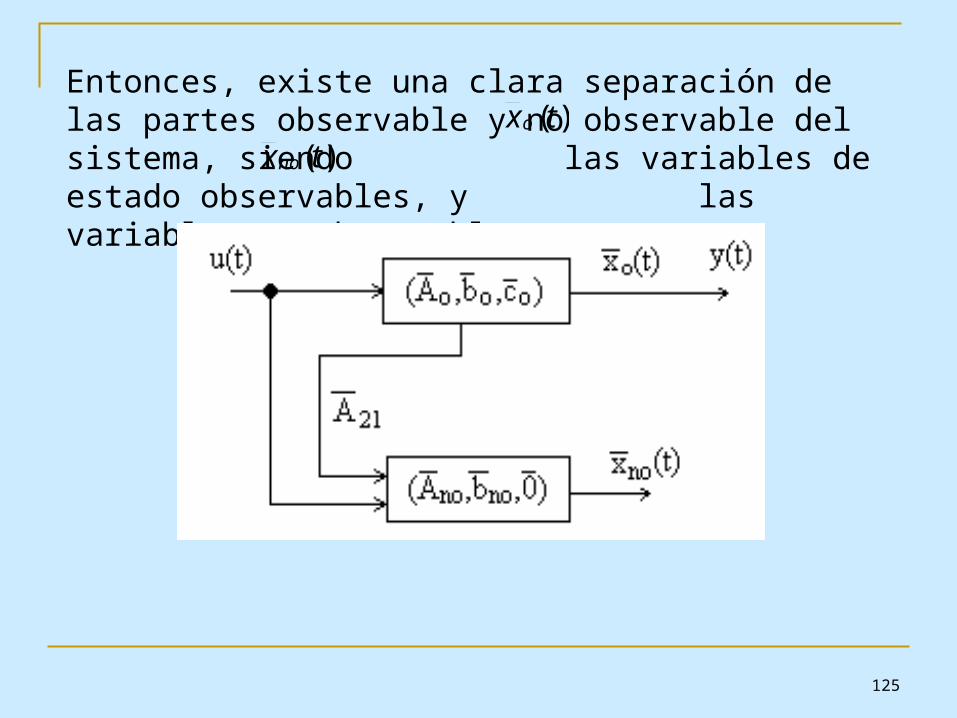
Entonces, existe una clara separación de las partes observable y no observable del sistema, siendo las variables de estado observables, y las variables no observables.
)(txo
)(txno
126
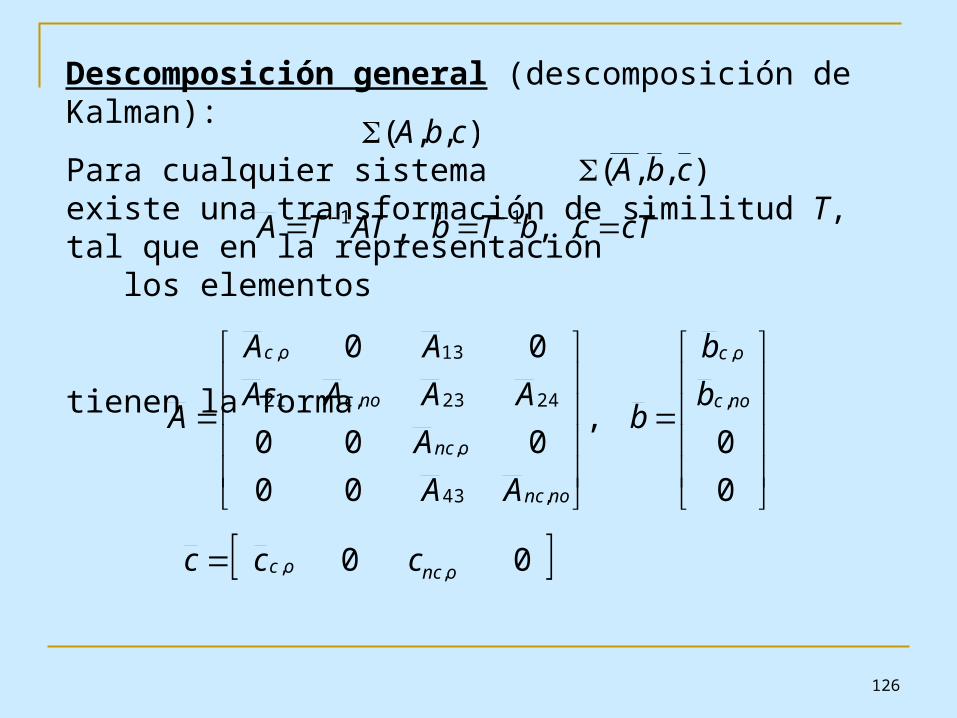
Descomposición general (descomposición de Kalman):
Para cualquier sistema existe una transformación de similitud T, tal que en la representación los elementos
tienen la forma
cTcbTbATTA , , 11
0 0
0
0 ,
00
000
00
,,
,
,
,43
,
2423,21
13,
oncoc
noc
oc
nonc
onc
noc
oc
ccc
b
b
b
AA
A
AAAA
AA
A
),,,( cbA),,( cbA
127
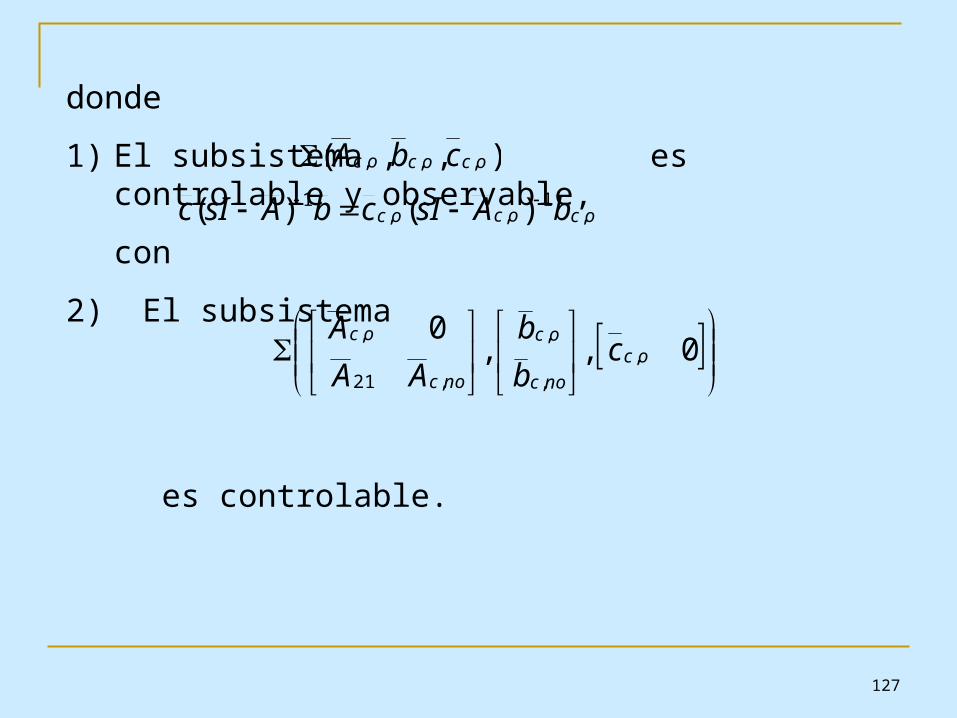
donde
1) El subsistema es controlable y observable,
con
2) El subsistema
es controlable.
),,( ,,, ocococ cbA
.)()( ,1
,,1
ocococ bAsIcbAsIc
0,,
0,
,
,
,21
,oc
noc
oc
noc
occ
b
b
AA
A
128
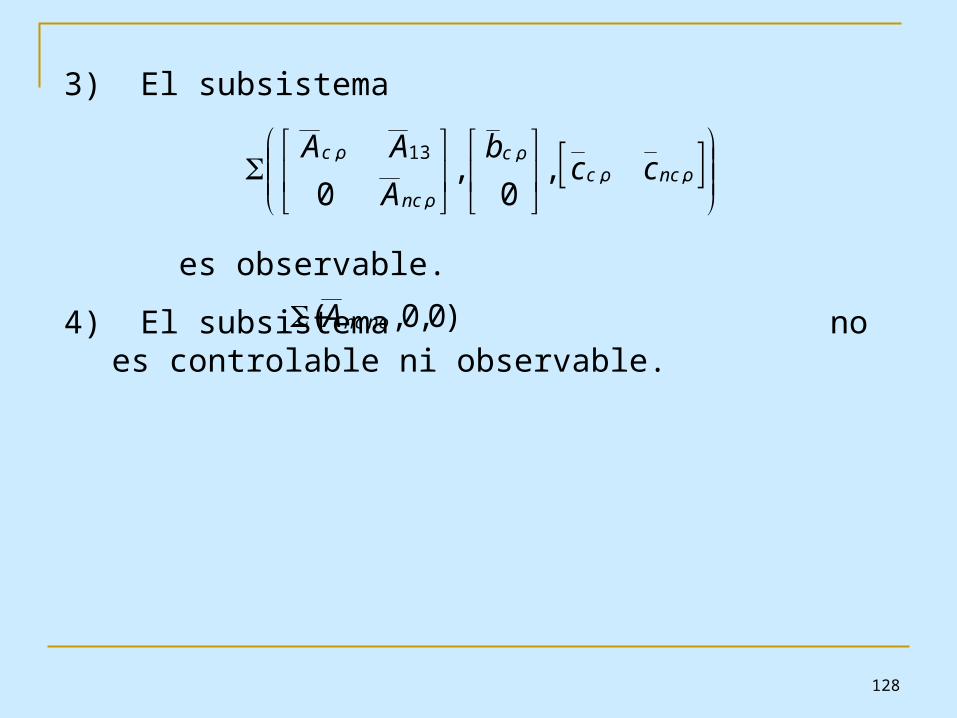
3) El subsistema
es observable.
4) El subsistema no es controlable ni observable.
oncoc
oc
onc
occc
b
A
AA,,
,
,
13,,
0,
0
)0,0,( ,noncA
129
130
3.7 Pruebas PBH (Popov-Belevitch-Hautus) para controlabilidad y observabilidad
Teorema 3.7 (Prueba de vectores propios)
1. El par (A,b) es controlable si y solo si no existe un vector fila tal que
Es decir, el par (A,b) es controlable si y solo si ningún vector propio izquierdo de A es ortogonal a b.
0q
.0y , qbqqA
131
2. El par (c,A) es observable si y solo si no existe un vector columna tal que
Es decir, el par (c,A) es observable si y solo si ningún vector propio derecho de A es ortogonal a c.
0p
.0y , cppAp
132
Teorema 3.8 (Prueba de rango)
1. El par (A,b) es controlable si y solo si
2. El par (c,A) es observable si y solo si
. todapara rango snbAsI
. todapara rango snAsI
c
133
4. Conceptos básicos de estabilidad
134
Un sistema en reposo se dice BIBO (bounded input-bounded ouput) estable, o externamente estable, si cualquier entrada acotada
produce una salida acotada
, ,)( 01 ttMtu
. ,)( 02 ttMty
135
Teorema 4.1. El sistema es BIBO estable si y solo si
donde h(t) es la respuesta al impulso del sistema.
Teorema 4.2. El sistema con función de transferencia H(s) es BIBO estable si y solo si los polos de H(s) tienen parte real negativa.
Mdtth0
)(
),,( cbA
),,( cbA
136
El sistema se dice internamente estable, o asintóticamente estable, si la solución de
tiende a cero a medida que t tiende a infinito, para cualquier condición inicial
Teorema 4.3. El sistema es internamente estable si y solo si la parte real de los valores propios de la matriz A es negativa, esto es,
0)0( ),()( xxtAxtx
.0x
.0)}(Re{ Ai
),,( cbA
),,( cbA
137
Si para todos los valores propios de A, entonces se dice que A es una matriz estable.
Observe que:
• Estabilidad interna implica estabilidad externa.
• Ambos conceptos son equivalentes si es una representación mínima de H(s), esto es, si el sistema es controlable y observable.
Un sistema no controlable se dice estabilizable si la parte no controlable es estable.
0)}(Re{ Ai
),,( cbA
),,( cbA
138
Otra manera de verificar la estabilidad asintótica de un sistema es mediante el criterio de Lyapunov.
Considere un sistema dado por
donde x(t) es el vector de estado del sistema, y sea
la solución de la ecuación anterior, donde
Para el sistema anterior, al estado que satisface
se le conoce como estado de equilibrio.
),()( txftx
),;( 00 txt. en 00 ttxx
ex
, todopara ,0),( ttxf e
139
Sea
una región esférica de radio k alrededor del punto de equilibrio donde es la norma Euclideana, definida como
Sea los puntos tales que
y sea los puntos tales que
kxx e ||||
,ex|||| exx
.])()[(|||| 2/12211 nenee xxxxxx
)(S
|||| 0 exx
)(S
. ,||),;(|| 000 ttxtxt e
140
Un estado de equilibrio se dice que es estable en el sentido de Lyapunov si para cualquier existe tal que las trayectorias que inicien en no se salen de a medida que el tiempo tiende a infinito.
Un estado de equilibrio se dice asintóticamente estable si es estable en el sentido de Lyapunov, y si cualquier solución que inicie dentro de converge a a medida que el tiempo tiende a infinito, sin salirse de
Un estado de equilibrio se dice inestable si para algún valor real y cualquier valor arbitrariamente pequeño, existe un estado en tal que la trayectoria iniciando en este estado sale de
ex)(S )(S
)(S )(S
ex
)(S ex).(S
ex,0 0
0x )(S).(S
141
La matriz simétrica P se dice semidefinida positiva (o definida no negativa) si para todo vector x. Si la igualdad se cumple solo si x=0, entonces P se dice definida positiva.
Lema 4.1. Todos los valores propios de una matriz simétrica son reales.
0PxxT
142
Los menores principales de una matriz P son aquellos menores cuyos elementos diagonales son también elementos diagonales en P.
Los menores principales líderes de P son aquellos que se obtienen eliminando las últimas k columnas y las últimas k filas, k=n-1, n-2,...,0.
143
Lema 4.2. Las siguientes afirmaciones son equivalentes:
i) La matriz simétrica P es definida positiva (semidefinida positiva).
ii) Todos los valores propios de P son positivos (no negativos).
iii) Todos los menores principales líderes de P son positivos (no negativos).
144
El criterio de Lyapunov puede enunciarse de la siguiente manera:
Teorema 4.4. La matriz A es estable (o equivalentemente, el sistema es asintóticamente estable) si y solo si dada una matriz simétrica definida positiva Q, existe una (única) matriz simétrica definida positiva P tal que
.QPAPAT
),,( cbA
145
5. Retroalimentación de estado
146
5.1 Asignación del polinomio característico del sistema
Sea el sistema (escalar)
cuyo polinomio característico es
.)(det)( 11 n
nn asasAsIsa
).()(
)()()( ),,(tcxty
tbutAxtxcbA.
147
Se desea modificar el sistema por medio de la retroalimentación de estado
donde es un vector fila y v(t) es una nueva entrada, a fin de obtener un sistema en lazo cerrado con polinomio característico deseado
Esto significa que buscamos reubicar los modos del sistema (y por consiguiente, los polos del mismo) mediante retroalimenta-ción de estado.
)()()( tvtkxtu
nkkkk 21
.)( 11 n
nn sss
),,( cbA
148
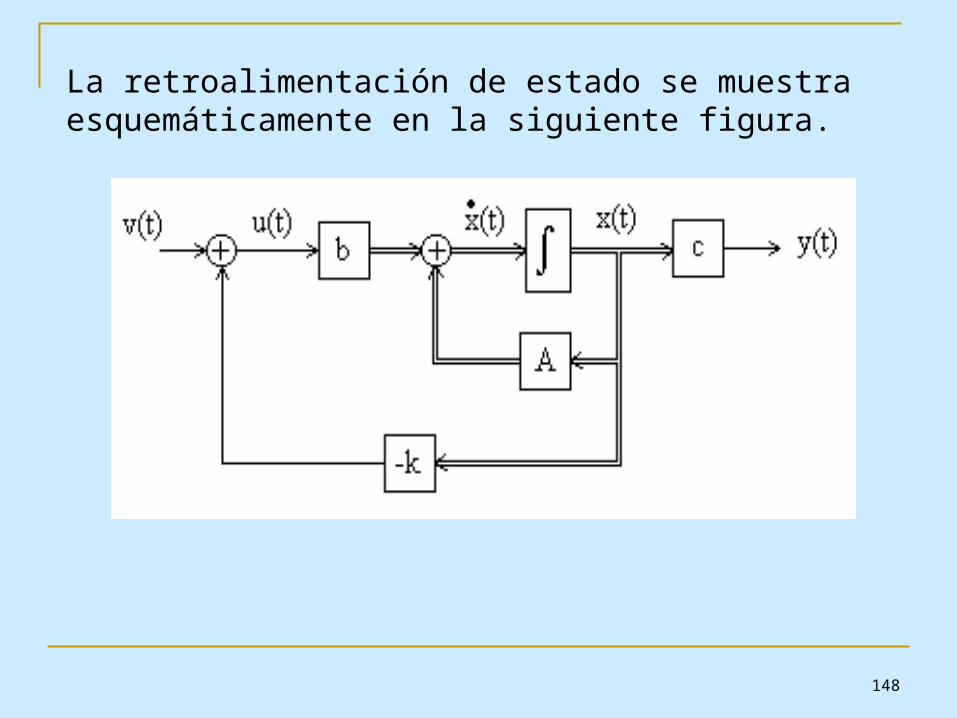
La retroalimentación de estado se muestra esquemáticamente en la siguiente figura.
149
Aplicando la retroalimentación de estado al sistema obtenemos el sistema en lazo cerrado
cuyo polinomio característico es
Entonces, el problema es averiguar bajo qué condiciones existe tal que y cómo calcular el
vector k.
).(det)( bkAsIsak
)()()( tvtkxtu ),()( sas k
)()()( tvtkxtu ),,( cbA
)()(
)()()()( ),,(tcxty
tbvtxbkAtxcbbkA.
150
Tenemos que
Lema 5.1. Sean L y N matrices de dimensiones respectivamente. Entonces se cumple que
].)(det[)(det
]})()[det{(
)(det)()(
1
1
bkAsIIAsI
bkAsIIAsI
bkAsIsas
n
n
k
).(det)(det NLILNI mn
nmmn y
151
Utilizando el lema anterior en con
tenemos que
Por lo tanto
de donde
],)(det[ 1bkAsIIn
,1y , ,)( 1 mkNbAsIL
.)(1
])(1det[])(det[1
11
bAsIk
bAsIkbkAsIIn
],)(1)[()( 1bAsIksas
.)()()()( 1bAsIksasas
152
Como tenemos en la ecuación anterior polinomios en “s”, el vector k puede encontrarse igualando los coeficientes correspon-dientes de las potencias de “s”.
Para ello utilizamos la expresión
)].(
)()([)(
1)(
12
11
321
221
11
IaAaA
sIaAaAsIaAIssa
AsI
nnn
nnn
153
Por lo tanto
Examinando por potencias de “s” la ecuación anterior, tenemos que
.])()([
)()(3
2122
11
11
11
bsIaAaAsIaAIsk
asasssnnn
nnn
nnn
21
233
122
11
kbakAbabkAa
kbakAba
kba
154
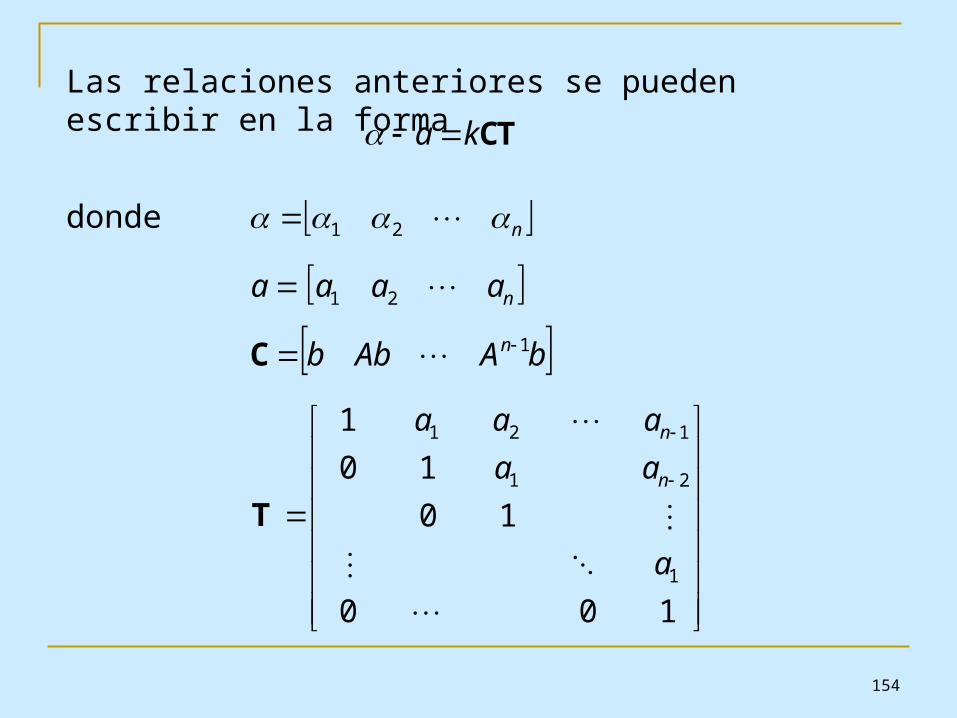
Las relaciones anteriores se pueden escribir en la forma
donde
TCka
.
100
10
10
1
1
21
121
1
21
21
a
aa
aaa
bAAbb
aaaa
n
n
n
n
n
T
C
155
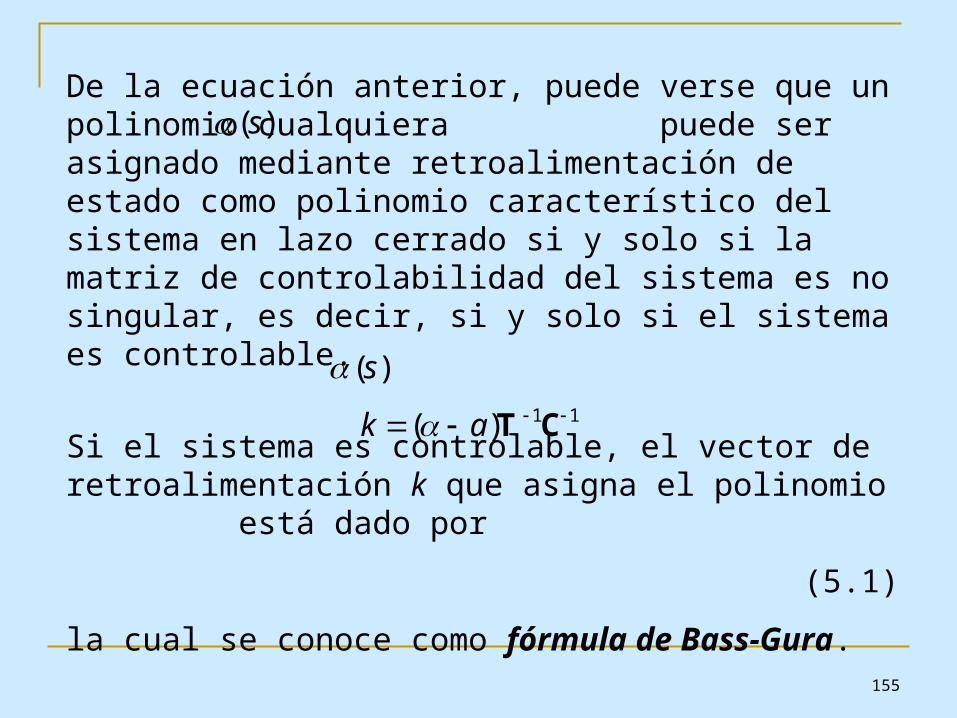
De la ecuación anterior, puede verse que un polinomio cualquiera puede ser asignado mediante retroalimentación de estado como polinomio característico del sistema en lazo cerrado si y solo si la matriz de controlabilidad del sistema es no singular, es decir, si y solo si el sistema es controlable.
Si el sistema es controlable, el vector de retroalimentación k que asigna el polinomio está dado por
(5.1)
la cual se conoce como fórmula de Bass-Gura.
)(s
11)( CTak
)(s
156
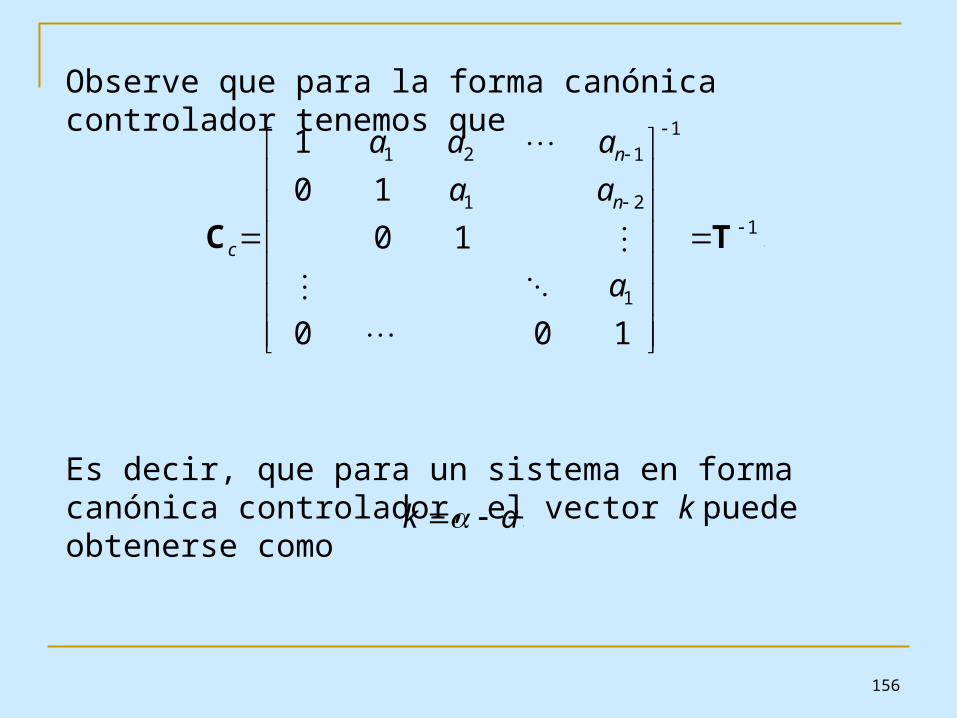
Observe que para la forma canónica controlador tenemos que
Es decir, que para un sistema en forma canónica controlador, el vector k puede obtenerse como
.
100
10
10
1
1
1
1
21
121
T
a
aa
aaa
n
n
cC
.ak
157
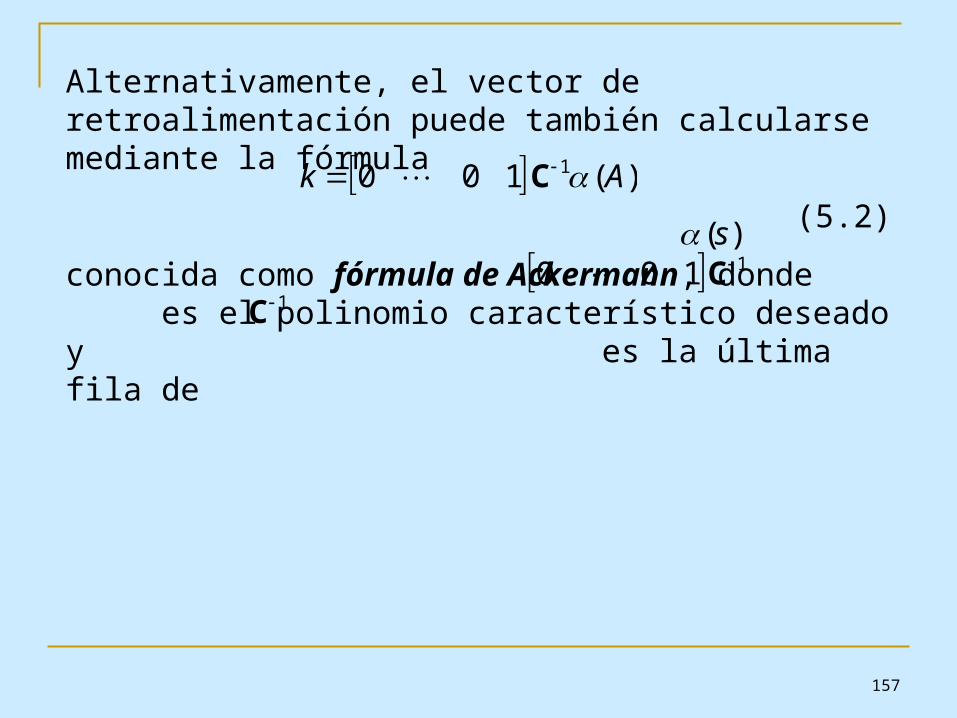
Alternativamente, el vector de retroalimentación puede también calcularse mediante la fórmula
(5.2)
conocida como fórmula de Ackermann, donde es el polinomio característico deseado y es la última fila de
)(100 1 Ak C
)(s 1100 C
.1C
158
5.2 Efecto de la retroalimentación sobre ceros del sistema, controlabilidad y observabilidad
Efecto de la retroalimentación sobre ceros del sistema
Sea
la función de transferencia del sistema
Suponiendo que a(s) y b(s) son coprimos, los ceros del sistema son las raíces de b(s) y los polos del sistema son las raíces de a(s).
)()(
)()()(
)( 1
sasb
bAsIcsUsY
sH
).,,( cbA
159
Para la retroalimentación de estado
tenemos que (condiciones iniciales iguales a cero)
de donde
)()()( tvtkxtu
)()()()()()( 1 sVsbUAsIksVskXsU
.)(1
1)()(
1bAsIksVsU
160
Entonces, la función de transferencia del sistema en lazo cerrado está dada por
donde
)()()(
)()()(
)()(
)(11
)()(
)()(
)()(
)()(
)( 11
sgsasb
sgsasa
sasb
bAsIksasb
sVsU
sUsY
sVsY
bbkAsIc
.)(Adj:)( bAsIksg
161
De lo anterior puede verse que:
1. El polinomio característico del sistema en lazo cerrado es
2. Los ceros del sistema no son afectados por retroalimentación de estado en el sentido de que no se pueden reubicar. Sin embargo, los ceros se pueden cancelar si y b(s) tienen raíces comunes.
).()()( ssgsa
)(s
162
Efecto de la retroalimentación sobre la controlabilidad
Considere que tenemos un sistema controlable, dado en la forma canónica controlador
Se puede ver que con la retroalimentación de estado el sistema retroalimentado
sigue estando en la forma canónica controlador, y por lo tanto sigue siendo controlable.
Si el sistema no es controlable, el sistema retroalimentado tampoco es controlable.
Entonces, la retroalimentación de estado no afecta la controlabilidad del sistema.
).,,( ccc cbA
),()()( tvtkxtu ),,( cccc cbkbA
163
Efecto de la retroalimentación sobre la observabilidad
Para analizar la observabilidad, suponga que el sistema es controlable y observable. Como se vio anteriormente, la función de transferencia del sistema retroalimentado es
Entonces el sistema el cual sigue siendo controla-ble, será observable si y solo si b(s) y son coprimos, esto es, si y solo si los modos del sistema en lazo cerrado no coinciden con los ceros del sistema. Por lo tanto, la observabili-dad puede ser afectada por retroalimentación de estado.
.)()(
)()()(
)( 1
ssb
sgsasb
bbkAsIc
),,,( cbbkA )(s
),,( cbA
164
5.3 Referencia constante en estado permanenteSea controlable, y suponga que al tiempo se presenta una perturbación de manera tal que y que se desea usar la retroalimentación de estado para llevar a cero.
Entonces, si el sistema no es estable, o si se desea por ejemplo hacer que tenga una dinámica más rápida (o más lenta), se debe calcular el vector k para ubicar los modos del sistema en lazo cerrado en posiciones adecuadas en la parte izquierda del plano complejo. La velocidad con que tienda a cero dependerá de los modos del sistema en lazo cerrado, es decir, de los valores propios de la matriz
00 t,0)0( 0 xx)()( tkxtu
0x
0x
).( bkA
),,( cbA
165
Suponga que en lugar de llevar el estado del sistema a cero, se quiere llevar a un estado dado, tal que la salida del sistema tienda a un valor constante deseado, es decir
A este problema le llamaremos lograr una referencia constante en estado permanente.
Utilizando la retroalimentación de estado tenemos que
de donde
.)()( dytcxty
,)()( dvtkxtu
0)()(
dd bvxbkAtx
.)( 1dd bvbkAx
166
Entonces
Sea
la función de transferencia del sistema en lazo cerrado.
Entonces tenemos que
de donde
.)( 1ddd bvbkAccxy
bbkAsIcsH k1)()(
dkd vHy )0(
.)0(k
dd H
yv
167
Por lo tanto, para una función de transferencia en lazo cerrado existe una entrada tal que si
es decir, si no tiene ceros en s=0.
Dado que los ceros de corresponden a los ceros de H(s), entonces existe si
Observe que la velocidad con que la salida tienda al valor deseado depende de los modos del sistema en lazo cerrado.
dada, )(sH k dv dyty )(,0)0( kH )(sH k
)(sH k
dv .0)0( 1 bcAH
168
5.4 Rechazo de perturbaciones constantes
Sea el sistema
donde w es una perturbación constante desconocida (vector), y suponga que se quiere llevar la salida del sistema a cero, aún en presencia de esta perturbación.
)()(
)()()(
tcxty
wtbutAxtx
169
Utilizando la retroalimentación de estado u(t)=-kx(t) se puede estabilizar el sistema, pero tendremos valores en estado estacionario para la salida diferentes de cero.
Para rechazar la perturbación w (es decir, para hacer que la salida tienda a cero sin importar el valor de w), además de retroalimentación de estado, vamos a utilizar retroalimentación dinámica de la salida.
Sea y la entrada u(t) dada por
es decir, la entrada u(t) es una combinación de retroalimentación de estado con retroalimentación dinámica de la salida.
),()( tytq .
)()()( 21 tqktxktu
170
Entonces, tenemos el sistema aumentado
Si se asignan de manera tal que el sistema aumentado anterior sea estable, entonces tendremos que
es decir, la salida del sistema tenderá a cero sin importar el valor de la perturbación w.
.0)(
)(
0)(
)( 21
w
tq
tx
c
bkbkA
tq
tx.
.
21 y kk
)()(0 ycx
171
6. Observadores de estado
172
6.1 Diseño del observador
Si un sistema es controlable, se ha visto que mediante retroali-mentación de estado se puede asignar cualquier polinomio característico en lazo cerrado.
Suponga sin embargo, que por alguna razón los estados del sistema no son accesibles, o que no se tienen los elementos para medirlos. Entonces es necesario estimarlos, y para ello utilizaremos lo que se conoce como un observador de estado.
173
El problema es entonces el siguiente: ¿cómo determinar los estados del sistema
a partir del conocimiento de la entrada u(t) y de la salida y(t)?
Suponga que dado el sistema construimos un modelo o sistema paralelo
cuyos estados si serán accesibles.
)()(
)0( ),()()( 0
tcxty
xxtbutAxtx
.
)(ˆ)(ˆ
ˆ)0(ˆ ),()(ˆ)(ˆ 0
txcty
xxtbutxAtx
.
,0 ),( ttx
),,( cbA
174
Como podemos aplicar la entrada u(t) al modelo construido, lo que necesitamos para conocer es la condición inicial x(0). Esta condición inicial se puede calcular si el sistema es observable (ver Observabilidad en el Capítulo 3).
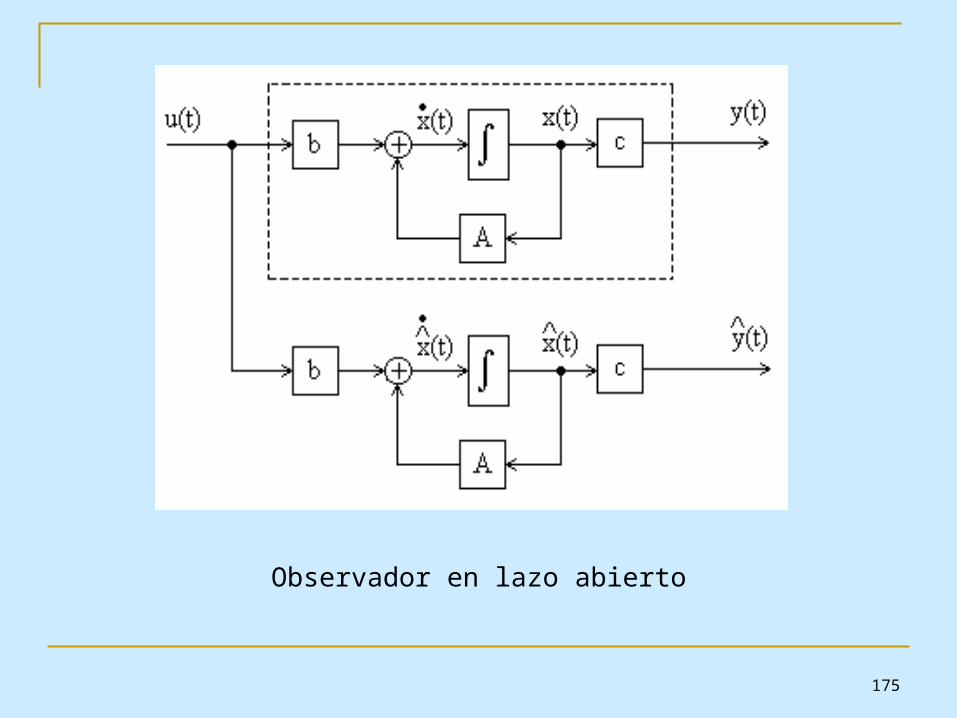
A este esquema donde la salida del sistema no se utiliza, se le conoce como observador en lazo abierto.
,0 ),( ttx
175
Observador en lazo abierto
176
Incluso no tomando en cuenta que no hay ajuste a las perturba-ciones que pudieran surgir durante la operación del sistema, este observador en lazo abierto presenta otros problemas como el siguiente.
Suponga que la condición inicial que se utiliza para el modelo construido tiene un pequeño error, esto es
Entonces los estados del modelo no serán x(t) sino un estimado
)0(x̂
.|||||||| ,)0(ˆ 00 xxx
ecuación la satisface que )(ˆ tx
.ˆ)0(ˆ ),()(ˆ)(ˆ 00 xxxtbutxAtx.
177
Por lo tanto, existirá un error que satisface la ecuación
Ahora, dependiendo de los valores propios de la matriz A, el error puede crecer arbitrariamente a medida que el tiempo t tiende a infinito (valores propios de A con parte real positiva), o puede tardar mucho tiempo en desaparecer (valores propios de A con parte real negativa muy pequeña).
Una forma efectiva de compensar el error es usando algún tipo de retroalimentación, en este caso retroalimentación de la señal de salida y(t), y entonces tendremos un observador en lazo cerrado.
)(~ tx
)(ˆ)()(~ txtxtx
.)0(~ ),(~)(~ xtxAtx.
178
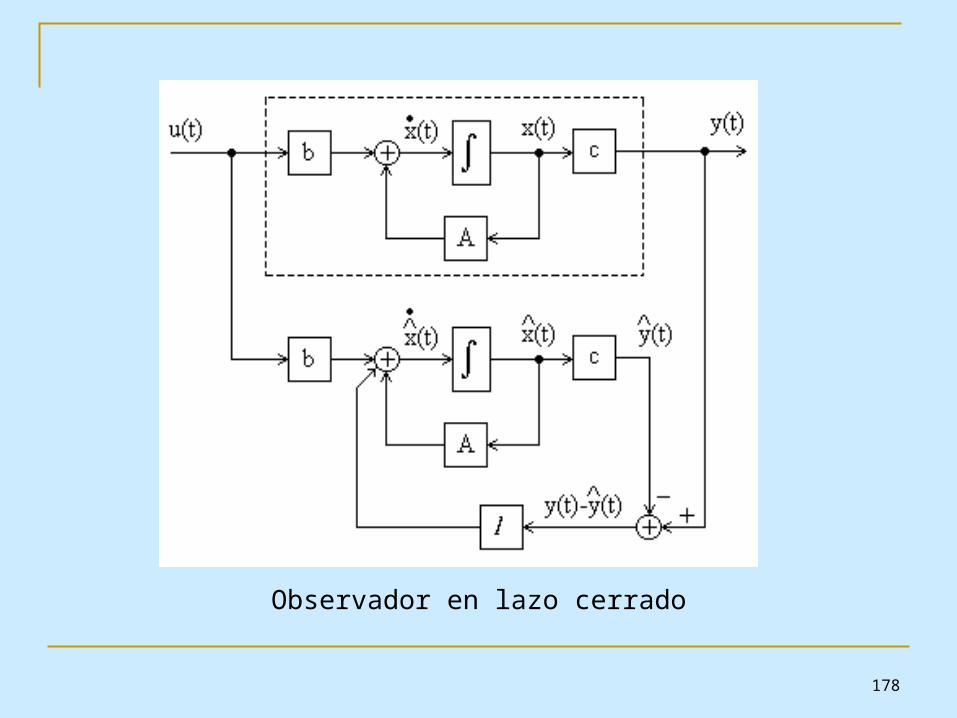
Observador en lazo cerrado
179
La señal de error será
Entonces tenemos que
donde es el vector inicial estimado y l es el vector de retroalimentación que debe de servir para controlar el error el cual satisface la siguiente ecuación
).(~)(ˆ)()(ˆ)( txctxctcxtyty
0ˆ)0(ˆ )],(ˆ)([)()(ˆ)(ˆ xxtytyltbutxAtx .
0x̂
.ˆ)0(~ ),(~)()(~)(~
)](ˆ)()()(ˆ[)()(
)(ˆ)()(~
00 xxxtxlcAtxlctxA
txlctlcxtbutxAtbutAx
txtxtx
...
),(~ tx
180
El problema ahora es asignar el vector l de manera tal que el error tienda a cero tan rápido como se considere necesario (debido a esta propiedad, se le conoce como observador asintótico).
Esto es equivalente a decir que debe existir l tal que los valores propios de la matriz (A-lc) puedan ser arbitrariamente asignados.
Teorema 6.1. Existe un vector l tal que
donde es un polinomio cualquiera, si y solo si el sistema es observable.
nnn ssslcAsI 1
1)()det(
)(s
)(~ tx
181
En tal caso, el vector l estará dado por
donde es la matriz de observabilidad del sistema,
TT aAcl )())(,( 11 TO
),( AcO
100
10
10
1
1
21
121
21
21
a
aa
aaa
aaaa
n
n
n
n
T
y es el polinomio característico del sistema.
nnn asasAsIsa 1
1)det()(
182
Utilizando la formula de Ackermann, el vector l también puede calcularse mediante
.
1
0
0
),()( 1
AcAl O
183
6.2 Esquema observador-controlador
Nos interesa estudiar el desempeño del sistema cuando es retroalimentado, no con el estado x(t) (que no es accesible), sino con el estado estimado del observador, es decir, la ley de control es de la forma
)(ˆ tx
).()(ˆ)( tvtxktu
),,( cbA
184
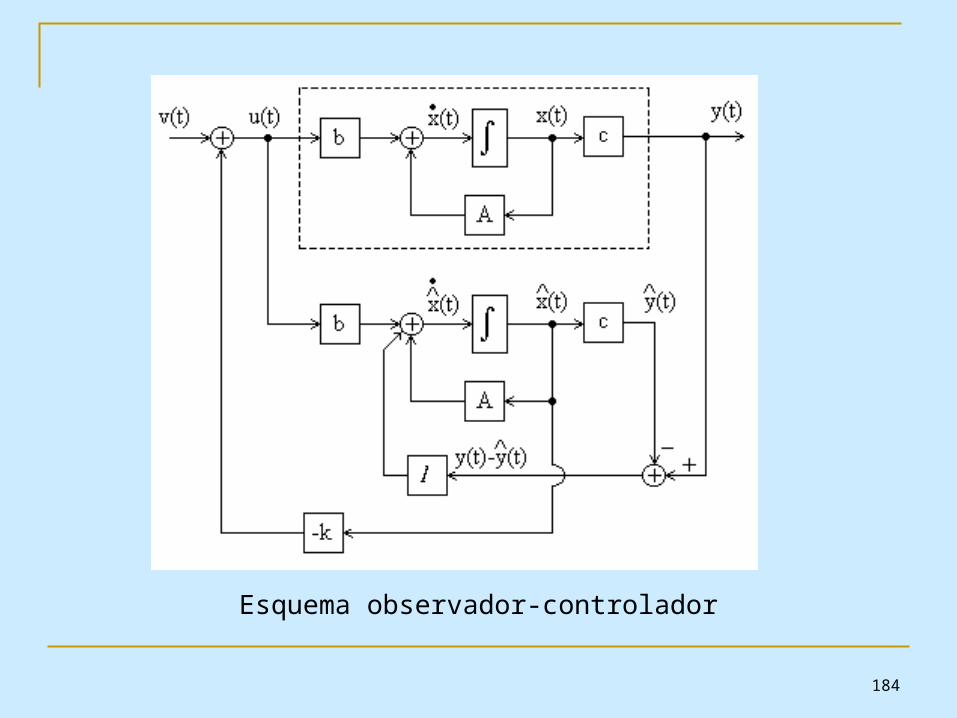
Esquema observador-controlador
185
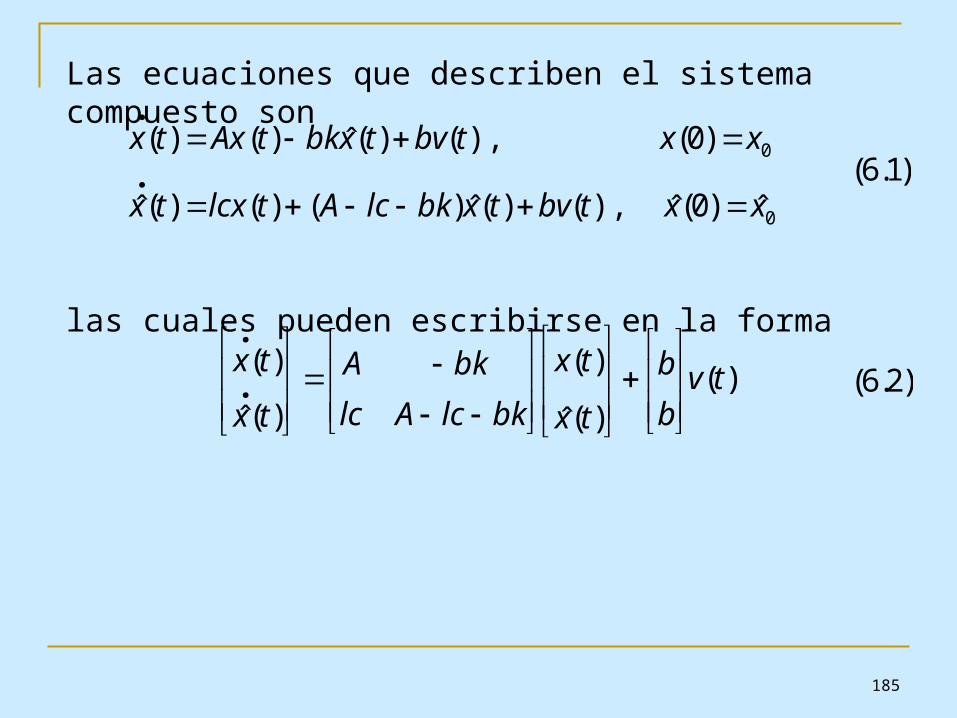
Las ecuaciones que describen el sistema compuesto son
las cuales pueden escribirse en la forma
0
0
ˆ)0(ˆ ),()(ˆ)()()(ˆ
)0( ),()(ˆ)()(
xxtbvtxbklcAtlcxtx
xxtbvtxbktAxtx
.
.
).()(ˆ
)(
)(ˆ
)(tv
b
b
tx
tx
bklcAlc
bkA
tx
tx
.
.
)1.6(
)2.6(
186
Primeramente se obtendrá la función de transferencia del sistema compuesto.
Tomando transformada de Laplace de (6.1) y considerando condiciones iniciales iguales a cero, tenemos
De (6.4) despejamos
)()(ˆ)()( sbVsXbksAXssX
).()(ˆ)()()(ˆ sbVsXbklcAslcXsXs
)3.6(
)4.6(
)(ˆ sX
).()()()()(ˆ 11 sbVbklcAsIslcXbklcAsIsX
187
Reemplazando en (6.3)
Reagrupando
que puede escribirse como
)(ˆ sX
).()]()(
)()[()()(1
1
sbVsbVbklcAsI
slcXbklcAsIbksAXssX
)(])([
)(])([1
1
sbVbklcAsIbkI
sXlcbklcAsIbkAsI
).()(}])([
){(])([1
11
sbVsXlcbklcAsIbkI
lcAsIbklcAsIbkI
188
Haciendo uso de la siguiente fórmula matricial
tenemos que
Entonces
111 ])([)( RQsIPIRRPQsIPI
.])([)( 111
lcAsIbkIbklcAsIbkIPQsIP
).()(}])([
)]{()([11
1
sbVsXlclcAsIbkI
lcAsIlcAsIbkI
189
De la ecuación anterior tenemos
de donde
Como
entonces la función de transferencia del sistema compuesto es
),()(][ sbVsXlcbklcAsI
).()()( 1 sbVbkAsIsX
)()()()( 1 sbVbkAsIcscXsY
.)()( 1bbkAsIcsH
190
Observe entonces que la función de transferencia del sistema compuesto corresponde también a la función de transferencia del sistema retroalimentado por u(t)=-kx(t)+v(t).
Es decir, que la función de transferencia del sistema compuesto no depende de la dinámica del observador. Este es un resultado que era de esperarse, debido a que la función de transferencia del sistema se obtiene considerando condiciones iniciales iguales a cero, y en este caso tenemos un observador perfecto, es decir, ).()(ˆ txtx
),,( cbA
191
El problema ahora es determinar si el observador no introduce modos inestables al sistema (cuando se tienen sistemas interconectados, puede ocurrir que el sistema compuesto sea inestable, aún cuando los subsistemas sean estables).
De (6.2), se puede ver que los modos del sistema compuesto corresponden a los valores propios de la matriz
.
bklcAlc
bkA
192
Sea el polinomio característico de la matriz anterior. Entonces tenemos que
)(sa co
).()(
)det()det(
0
0
0det
det)(
sasa
bkAsIlcAsI
I
II
bkAsIlc
lcAsI
I
II
bklcAsIlc
bkAsIsa
contobs
co
193
De lo anterior tenemos entonces que el polinomio característico del sistema compuesto es igual al producto de los polinomios característicos del observador y del sistema retroalimentado. Es decir, que si son estables, entonces es también estable.
Otra consecuencia importante que se deduce de esto es que el observador y el controlador pueden diseñarse de manera independiente, y a esto se le conoce como el principio de separación.
)(y )( sasa contobs )(sa co