“respuesta en frecuencia de sistemas lineales,...
TRANSCRIPT

Universidad Nacional de San Juan
Facultad de Ingeniería Departamento de Electrónica
y Automática
“RESPUESTA EN FRECUENCIA DE SISTEMAS LINEALES, INVARIANTES EN EL TIEMPO.”
Cátedra: Control I. Carreras: Ingeniería Electrónica y Bioingeniería. Autores: Ing. Mario Alberto Perez. Ing. Analía Perez Hidalgo. Dra. Bioing. Elisa Perez Berenguer.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 1 -
RESPUESTA FRECUENCIAL 1- Introducción. Ya se ha investigado la respuesta de componentes y sistemas a varios tipos de entradas en el dominio temporal. Se vio que la función respuesta )(tc contiene dos términos, un término transitorio (la solución complementaria) y un término de estado estacionario o constante (la solución particular), obtenidos ambos por la solución de la ecuación del sistema, cuando es aplicada una excitación en la entrada. El presente capítulo se dedicará al estudio de la respuesta en estado estable de componentes y sistemas cuando sean excitados por una señal senoidal de amplitud fija pero con una frecuencia que varía en un cierto rango. Este concepto se ilustra en la figura 1, en la cual un sistema lineal es excitado por una señal tsena ω , la respuesta es [ ])()( ωφωω +tsenb .
Figura 1. La forma de las ondas de entrada y salida se ilustran en la figura 2.
Figura 2.
Este resultado obtenido concuerda totalmente con lo ya visto como solución particular de un sistema cuando era excitado por una señal armónica de la forma tsenHtr ω=)( , donde H es la amplitud constante y ω la frecuencia angular de entrada, estando el sistema en estado estacionario. Para el caso de un sistema de primer orden la solución particular era:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 2 -
( )( )φω
ω−
+= tsen
T
HKtc221
1)( ωφ arctg=
Como se ve, tanto la amplitud de la respuesta )(1 tc como la fase son ambas funciones de la frecuencia ω de la entrada, lo que corrobora lo dicho anteriormente. El siguiente gráfico ilustra lo que se acaba de mencionar:
Figura 3. Es común en el análisis frecuencial que el interés se centre en el estudio de las siguientes relaciones: a) La relación de amplitud ab , que se la denomina relación de magnitud y se la designa como )(ωM . b) El ángulo de fase )(ωφ . Un ángulo de fase negativo recibe el nombre de retardo de fase, y un ángulo de fase positiva es denominado adelanto de fase. Se tratará ahora la determinación de información sobre la respuesta a la fre-cuencia, de un modo analítico, aunque tales datos se pueden obtener experimentalmente si el sistema existe. Las mediciones de respuesta en frecuencia en general son simples y pueden ser efectuadas con exactitud usando generadores de señal senoidales fácilmente obtenibles y equipos de medición precisos. Frecuentemente se pueden determinar experimentalmente, las funciones transferencia de componentes complicados en prueba de respuesta de frecuencia. Además, el método de respuesta de frecuencia tiene la ventaja de que se puede diseñar un sistema de manera que los efectos del ruido indeseable sean despreciables, y de que ese análisis y diseño pueda extenderse a ciertos sistemas de control no lineales. Obtener la respuesta frecuencial es importante puesto que proporciona medios convenientes para obtener la respuesta en el estado estable pera cualquier sistema lineal sujeto a una señal senoidal. También está relacionado íntimamente con el método de análisis frecuencial que se verá más adelante. El procedimiento simple para obtener la respuesta a la frecuencia, contenido en cuatro pasos, es el siguiente: 1 - Se obtiene la función de transferencia para el componente o sistemas a analizar. Es decir:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 3 -
)()()(
sRsCsF =
Donde )(sC es la transformada de la salida y )(sR la transformada de la entrada, y donde se han despreciado todas las condiciones iniciales porque se vio no afectada la respuesta en estado estable. 2 - En la función de transferencia se sustituye s por ωj . La justificación de esta sustitución se hará más adelante. 3 - Para varios valores de la frecuencia ω , se determina la relación de magnitud )(ωM y el ángulo de fase )(ωφ . 4 - Se grafican los resultados de 3 en coordenadas polares o rectangulares. Estas gráficas no solamente san medios convenientes para presentar los datos de respuesta a la frecuencia, sino que también son la base para los métodos de análisis y diseño que se verán en capítulos posteriores. Aunque la respuesta de frecuencia de un sistema de control de una imagen cualitativa de la respuesta transitoria, la correlación entre frecuencia y respuestas transitorias, es indirecta, excepto en el caso de sistemas de segundo orden. Al proyectar un sistema de lazo cerrado, se puede ajustar la característica de respuesta de frecuencia, usando diversos criterios de diseño para obtener características de respuesta transitoria aceptables. Una vez entendida la correlación indirecta entre diversas mediciones de la respuesta transitoria y la respuesta de frecuencia, puede utilizarse ventajosamente el método de respuesta de frecuencia. El diseño de un sistema de control basado en este procedimiento, se funda en la interpretación de las características de respuesta a la frecuencia. Este análisis de un sistema de control, indica gráficamente qué modificaciones hay que hacer en la función de transferencia de lazo abierto para obtener las características deseadas de respuesta transitoria. Lógicamente se podría hacer la pregunta de por qué es tan importante el análisis de la respuesta de sistemas a una señal senoidal, cuando en la práctica, los sistemas de control raramente están expuestos a señales armónicas. La respuesta es que la información obtenida por el análisis senoidal puede usarse para establecer la naturaleza de la respuesta a una gran variedad de señales. Además, el análisis es conveniente para manejarlo matemática y experimentalmente.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 4 -
2- Justificación de la Sustitución de s por jω. Ya se ha visto que para realizar el análisis frecuencial es necesario sustituir s por ωj en la función de transferencia. Esta sustitución será ahora justificada. El procedimiento consistirá en trabajar con una función de transferencia general, obteniendo primero la respuesta en el estado estable a una señal senoidal usando la transformada de Laplace, y después haciendo la sustitución de s por ωj . Si ambas soluciones resultan idénticas la sustitución es válida. Se supone una función de transferencia general con un numerador )(sN y un denominador
)(sD .
)()(
)()()(
sDsN
sRsCsF == (1)
La señal de entrada será una senoide con amplitud igual a uno ( tsenω ). La transformada de )(sR es:
22 ωω+s
; por lo tanto:
( )( ) )()(
)()(
)()()()( 22 sD
sNjsjssD
sNssD
sNsRsCωω
ωω
ω−+
=+
== (2)
Hay que recordar que todas las condiciones iniciales pueden despreciarse por-que éstas no afectan la respuesta en el estado estable. Desarrollando en fracciones parciales:
( ) ( ) ( ) ( ) ( )22
2
1
321 .......)(−+
+++
++
++
++
=n
n
rsC
rsC
rsC
jsC
jsCsC
ωω (3)
Donde ( )1rs + , ( )2rs + , …., son factores de )(sD . Para un sistema estable los
transitorios desaparecen (o sea las transformadas inversas de )( 1
3
rsC+
… se
anulan conforme ∞→t ) y la respuesta en el estado estable es:
tjtjSS eCeCtC ωω
21)( += − (4) Las constantes 1C y 2C se determinan por el método:
( )⎥⎦
⎤⎢⎣
⎡+=
→ nrSn rssDsNC
n )()(lim
o sea para este caso:
( ) ( )( )( )ω
ωωωω
ωωω
ω jjDjNjs
jsjssDsNCrs
sDsNC
jSrS 2)()(
)()(
)()(
111
1−−
−=+
−+=∴+=
−=−=

Respuesta en Frecuencia de Sistemas Lineales Control I
- 5 -
)()(
21
1 ωω
jDjN
jC
−−
−=∴ (5)
( )( )( )ωω
ωωω
ωωω
ω jjDjNjs
jsjssDsNC
jS 2)()(
)()(
2 =+−+
=+=
)()(
21
1 ωω
jDjN
jC =∴ (6)
Como alternativa, la fracción )()(
ωω
jDjN puede expresarse de la siguiente forma:
)()()()( ωω
ωω jBA
jDjN
+= (7)
)()()()( ωω
ωω jBA
jDjN
−=−− (8)
Donde )(ωA y )(ωB son números reales y son funciones de la frecuencia. Por lo tanto:
[ ])()(21
1 ωω jBAj
C −−= y [ ])()(21
2 ωω jBAj
C +=
Sustituyendo estos valores en la ecuación (4):
[ ] [ ] tjtjSS ejBA
jejBA
jtC ωω ωωωω +− ++−−= )()(
21)()(
21)( (9)
tjtjtjtj
SS ej
Bjej
Aej
Bjej
AtC ωωωω ωωωω2
)(2
)(2
)(2
)()( +++−= −− (10)
⎥⎦
⎤⎢⎣
⎡ ++⎥
⎦
⎤⎢⎣
⎡ −=
−−
2)(
2)()(
tjtjtjtj
SSeeB
jeeAtC
ωωωω
ωω
tBtsenAtCSS ωωωω cos)()()( +=∴ (11)
La respuesta en estado estable se ve que está compuesta por una senoide más una cosenoide. La suma de estas dos ondas se lleva a cabo por adición vectorial como se muestra en la figura 4.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 6 -
Figura 4. Aquí un vector o fasor de magnitud )(ωA se considera que esta girando en dirección contraria a las manecillas del reloj con una frecuencia ω . La proyección de este vector sobre el eje imaginario produce la senoide requerida. Un vector de magnitud )(ωB se muestra adelantado 90° con respecto al primer vector, su proyección sobré el eje imaginario produce la cosenoide requerida, Los dos vectores pueden reemplazarse par un solo vector de magnitud:
)()( 22 ωω BA +
Y ángulo de fase: )()(.)(
ωωωφ
ABtgarc=
Por lo tanta la (10) puede escribirse como:
( ))()()()( 22 ωφωωω ++= tsenBAtCSS
Donde: )()(.)(
ωωωφ
ABtgarc= (12)
Hay que recordar que la señal de entrada era una senoide can amplitud unitaria Por tanto, la relación de magnitud, es decir el cociente entre las amplitudes de salida y entrada es:
)()()( 22 ωωω BAM += (13)
Y el ángulo de fase: )()(.)(
ωωωφ
ABtgarc= (14)
Debe reconocerse que el ángulo de fase también puede ser negativo.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 7 -
Habiendo completado la solución usando transformada de Laplace, falta demostrar que el mismo resultado puede también puede obtenerse directamente haciendo la sustitución de s por jω en:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
C s N s C j N j A jBR s D s R j D j
ω ω ω ωω ω
= → = = + (15)
( )2 2( ) ( ) ( ) ( )( )
C j A B sen tR j
ω ω ω ω φ ωω
⎡ ⎤= + +⎣ ⎦
2 2( ) ( ) ( )M A Bω ω ω⎡ ⎤∴ = +⎣ ⎦ (16)
( )( )( )
Barc tagAωφ ωω
⎡ ⎤= ⎢ ⎥
⎣ ⎦ (17)
Que es el mismo resultado obtenido anteriormente, ahora con menos esfuerzo.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 8 -
3- Respuesta de Frecuencia a partir de los Diagramas de Polos y Ceros. Se puede determinar gráficamente la respuesta de frecuencia a partir de los diagramas de polos y ceros de la función de transferencia. Sea la siguiente función de transferencia:
( )( )( )
K s zG ss s p
+=
+ (18)
Donde p y z son reales. Se puede obtener la respuesta en frecuencia de esta función de transferencia de la relación:
( )( )( )
K j zG js j p
ωωω
+=
+ (19)
Los factores j zω + , j pω + son magnitudes complejas como puede verse en la figura 5.
Figura 5: Determinación de la respuesta de frecuencia en el plano complejo. La amplitud de ( )G jω es:
( )K j z
G jj j p
ωω
ω ω+
=+
(20)
( )K AP
G jOP BP
ω = (21)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 9 -
Y el ángulo de fase de ( )G jω es:
( )G j j z j j pω ω ω ω= + − − + (22)
( ) 90ºG j arc tag arc tagz pω ωω
⎡ ⎤⎡ ⎤= − − ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ (23)
1 2( )G jω φ φ φ= − − (24)
Donde los ángulos φ , 1φ y 2φ están definidos en la figura 5. Se hace notar que se define como sentido positivo para la medición de ángulo a la rotación anti horaria. Del análisis de la respuesta transitoria de los sistemas de lazo cerrado, se sabe que un par de polos complejos conjugados cercanos al eje jω produce un modo altamente oscilatorio de la respuesta transitoria. En el caso de la respuesta frecuencial, un par de polos así ubicados han de producir una respuesta de pico elevado. Sea, por ejemplo, la siguiente función de transferencia:
1 2
( )( ) ( )
KG ss p s p
=+ + +
(25)
Donde 1p y 2p son complejos conjugados como se ve en la figura 6. Se puede hallar la respuesta en frecuencia de esta función de transferencia.
Figura 6: Determinación de la respuesta en frecuencia en el plano complejo.
1 2
( ) KG jj p j p
ωω ω
=+ +
(26)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 10 -
( ) KG jAP BP
ω = (27)
1 2( )G jω φ φ= − − (28)
Donde los ángulos 1φ y 2φ están definidos en la figura 6. Como AP BP es muy
pequeño en la cercanía de 1ω ω= , 1( )G jω es muy grande. De manera que un par de polos complejos conjugados cerca del eje jω ha de producir una respuesta de frecuencia de pico elevado. Inversamente, si la respuesta de frecuencia no es de picos elevados, la función de transferencia no ha de tener polos complejos conjugados cerca del eje jω . Una función de transferencia así no ha de presentar respuesta transitoria altamente oscilatoria. Como la respuesta en frecuencia indirectamente describe la posición de los polos y ceros de la función de transferencia, se pueden estimar las características de respuesta transitoria del conocimiento de sus características de respuesta de frecuencia (esto se entenderá más claramente cuando se estudie el concepto de estabilidad relativa).

Respuesta en Frecuencia de Sistemas Lineales Control I
- 11 -
4- Especificaciones en el Dominio Frecuencial. Se ha puesto de manifiesto anteriormente que la información que se busca en el análisis de un sistema de control es normalmente la respuesta temporal. Sin embargo, en general, la respuesta temporal es difícil de obtener analíticamente a causa de la cantidad de cálculos que implica. Por consiguiente, la respuesta frecuencial de un sistema de control se obtiene a menudo por medio de métodos gráficos (representaciones polares y rectangulares tales como los diagramas de Nyquist y Bode que se estudian más adelante) y luego, la interpretación del comportamiento del sistema en el dominio temporal se basa en las relaciones entre ambos dominios, temporal y frecuencial. El punto de partida para el análisis en el dominio frecuencial es la función de transferencia. Para un sistema de control con realimentación unitaria, la función de transferencia de lazo cerrado es:
)(1)(
)()(
sGsG
sRsC
+= (29)
En condiciones de régimen sinusoidal, ωjs = , la ecuación 29 se convierte en:
)(1)()(
)()(
ωωω
ωω
jGjGjM
jRjC
+== (30)
Cuando )( ωjM se escribe en forma de amplitud y fase, se tiene:
( ) ( ) ( )mM j Mω ω φ ω= (31)
Donde:
)(1)()(ω
ωωjG
jGM+
= (32)
Y ( ) ( ) 1 ( )m G j G jφ ω ω ω= − + (33)
El significado de )( ωjM en un sistema de control es similar a la ganancia o amplificación de un amplificador electrónico. En un amplificador de audiofrecuencia, por ejemplo, el criterio ideal de proyecto es que el amplificador tenga una curva de ganancia plana para las audiofrecuencias. En los sistemas de control, sin embargo. La situación ideal en algunas ocasiones es que la salida siga a la entrada en todo instante o, simplemente, que el módulo de )( ωjM sea igual a la unidad para todas las frecuencias. Pero en la expresión de la ecuación 32 se ve que )( ωjM solo pede ser igual a la unidad cuando )( ωjG es infinito o, en otras palabras, la ganancia del sistema debe ser infinita para todas las frecuencias. Esto es imposible de conseguir en la práctica y además no es conveniente puesto que la mayoría de los sistemas de control resultan inestables para valores elevados de ganancia. Además,

Respuesta en Frecuencia de Sistemas Lineales Control I
- 12 -
todos los sistemas de control están sujetos a ruidos, es decir, además de responder a la señal de entrada los sistemas deben ser capaces de rechazar y suprimir los ruidos y las señales involuntarias. Esto significa que, en general, la respuesta en frecuencia de un sistema de control debe de tener un punto de corte característico y, algunas veces una banda pasante o no pasante característica.
Figura 7: Comparación de las características de magnitud y fase de un filtro pasa bajo ideal (a) y de un sistema de control típico (b)
La característica de fase de la respuesta en frecuencia tiene también su importancia. La situación ideal es que la fase sea una función lineal de la frecuencia dentro de la banda de la señal de entrada. La figura 7 representa las características de ganancia y de fase de un filtro pasa bajo ideal, imposible de realizar físicamente. Las características típicas de amplitud y fase de un sistema de control están dibujadas en la figura 7b. Se ve que la ganancia disminuye al crecer la frecuencia. Ello es debido a los efectos de las inercias e inductancias de los sistemas físicos, por lo que toda respuesta cesa cuando la frecuencia tiende a infinito.
Las especificaciones más usadas de las características de un sistema de control en el dominio frecuencial son las siguientes;
1- Ancho de banda. El ancho de banda, A. B., se define como la frecuencia a la cual el módulo de ( )M jω vale el 70.7 % del nivel a frecuencia cero o 3 dB por debajo del nivel de frecuencia nula (figura 8). En general, el ancho de banda indica les características de filtraje de ruido del sistema. El ancho de banda da, también, una mecida de las propiedades de la respuesta transitoria. Un ancho de banda largo indica, normalmente, que las señales de alta frecuencia pasarán a la salida. Es decir, la respuesta transitoria debe de tener un tiempo de subida rápido acompañado de un amplio rebase.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 13 -
Por el contrario, si el ancho de banda es chico, solo pasarán las señales de baja frecuencia; por consiguiente, la respuesta temporal será lenta.
2- Factor de resonancia ( rM ). Se define como el valor máximo de ( )M ω , que proporciona además indicación de la estabilidad relativa del sistema. Si se recuerda la figura 10 y como se verá más adelante, cuando se estudió el diagrama de Bode de un sistema de segundo orden se obtienen distintas cur-vas de respuesta para distintos valores de δ .Es evidente que a valores elevados de rM corresponden amplios rebases de la respuesta temporal. Cuando se proyecta se admite, generalmente, que el valor oprimo de rM debe estar comprendido entre 1.1 y 1.5.
Figura 8: Curva de amplitud de un sistema. 3 — Frecuencia de resonancia ( rω ). Es la frecuencia para la que se produce el factor de resonancia.
4 - Razón de corte. A menudo para frecuencias elevadas es importante la razón de corte de la curva de respuesta, en frecuencia, puesto que indica la capacidad del sistema para distinguir la señal de ruido. Sin embargo, las características de corte agudo sen acompañadas normalmente de valores elevados de rM , lo que significa que el sistema es poco estable.
5 - Margen de amplitud y Margen de fase. Estas dos cantidades que son una medida de la estabilidad relativa de un sistema. Serán definidos más adelante cuando se estudien los diagramas de Bode y Nyquist.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 14 -
4.1- Especificaciones En El Dominio Frecuencial Para Un Sistema De Segundo Orden
En un sistema de segundo orden, el factor de resonancia rM y la frecuencia de resonancia rω depender, únicamente riel coeficiente de amortiguamiento δ y de la frecuencia natural sin amortiguamiento nω del sistema. Si se considera la función de lazo cerrado de segundo orden:
22
2
)(2)()(
nn
n
jjjM
ωωδωωω
ω++
= (34)
nn
jjM
ωωδ
ωω
ω−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=21
1)( (35)
Al utilizar la frecuencia reducida n
u ωω
= , el módulo de ( )M jω toma la
expresión:
( ) ( )222 21
1)(uu
uMδ+−
= (36a)
Y la fase de ( )M jω :
( )M jω : 21
)( 12
uutgum −
−= − δφ (36b)
La frecuencia de resonancia se determina derivando ( )M u con respecto a u e igualando a cero, es decir:
( ) ( )[ ] ( ) 08442121)( 232
3222 =+−+−−=
∂∂ −
δδ uuuuuuuM (37)
De donde:
0844 23 =+− δuuu (38) Por consiguiente:
0=u (39) Y
n
rruu
ωω
δ =−== 221 (40)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 15 -
La solución dada en la ecuación 39 indica meramente que la pendiente de la curva ( )M ω vale cero para 0ω = 0; no es un máximo. De la ecuación 40 se obtiene la frecuencia de resonancia que vale: 221 δωω −= nr (41)
Evidentemente, la ecuación 41 es válida solamente para 221 δ≥ o 707.0≤δ , puesto que de otra manera rω sería imaginario. Esto significa simplemente que para todos los valores de 707.0>δ no hay resonancia (o 1=rM ) en la curva )(ωM en función de ω . La curva )(ωM es inferior a uno para todos los valores de 0>ω si el coeficiente de amortiguamiento es mayor que 0.707
Sustituyendo la ecuación 40 en la 36a y simplificando se obtiene:
2121
δδ −=rM (42)
Es importante observar que rM es función de δ solamente, mientras que rω es función de ω y δ . Las figuras 9 y 10 representan respectivamente las curvas de rM y de ru en función de δ .
Figura 9: rM en función de δ para un sistema de segundo orden.
Respuesta en Frecuencia de Sistemas Lineales Control I
- 16 -
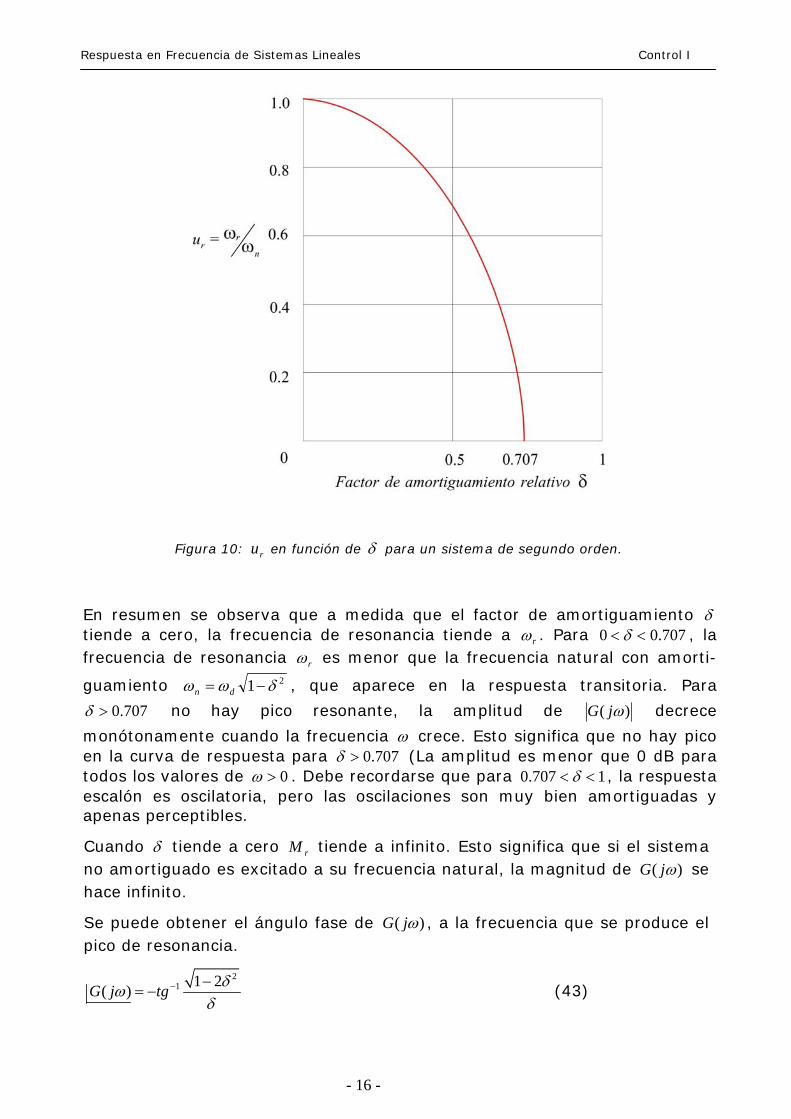
Figura 10: ru en función de δ para un sistema de segundo orden.
En resumen se observa que a medida que el factor de amortiguamiento δ tiende a cero, la frecuencia de resonancia tiende a rω . Para 707.00 << δ , la frecuencia de resonancia rω es menor que la frecuencia natural con amorti-
guamiento 21 δωω −= dn , que aparece en la respuesta transitoria. Para 707.0>δ no hay pico resonante, la amplitud de )( ωjG decrece
monótonamente cuando la frecuencia ω crece. Esto significa que no hay pico en la curva de respuesta para 707.0>δ (La amplitud es menor que 0 dB para todos los valores de 0>ω . Debe recordarse que para 1707.0 << δ , la respuesta escalón es oscilatoria, pero las oscilaciones son muy bien amortiguadas y apenas perceptibles.
Cuando δ tiende a cero rM tiende a infinito. Esto significa que si el sistema no amortiguado es excitado a su frecuencia natural, la magnitud de )( ωjG se hace infinito.
Se puede obtener el ángulo fase de ( )G jω , a la frecuencia que se produce el pico de resonancia.
21 1 2( )G j tg δω
δ− −
= − (43)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 17 -
5 - Gráficas Polares Como se había mencionado anteriormente, para varios valores de ω se obtienen los valores de )(ωM y )(ωφ los que podían ser graficados en coordenadas polares o rectangulares. Se verá a continuación la primera de estas formas de representación frecuencial. El diagrama polar de una función de transferencia senoidal )( ωjG es un diagrama de la amplitud de )( ωjG en función del ángulo de )( ωjG en coordenadas polares al variar ω desde cero a infinito. Se hace notar que en los diagramas polares, se mide un ángulo 'de fase positivo (negativo) en sentido antihorario (en sentido horario) desde el eje positivo real. El diagrama polar frecuentemente recibe el nombre de diagrama de Nyquist. En la figura 11 hay un ejemplo de ese diagrama. Cada punto del diagrama polar de )( ωjG representa el punto terminal de un vector pera un valor determinado de ω . En el diagrama polar es importante mostrar la graduación de frecuencia sobre el diagrama. Las proyecciones de )( ωjG en los ejes real e imaginario son sus componentes real e imaginario. Tanto la amplitud )( ωjG como el ángulo de fase ( )G jω deben ser calculados directamente
para cada frecuencia ω para peder construir los diagramas polares. Sin embargo, como el diagrama rectangular logarítmico que se verá posteriormente es fácil de construir, la información necesaria para trazar el diagrama polar puede ser obtenida directamente del diagrama logarítmico si se dibuja previamente aquél y se convierte decibeles en una magnitud ordinaria usando la figura 33.
Figura 11.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 18 -
Pera dos sistemas conectados en cascada la función de transferencia total de la combinación, en ausencia de efectos de carga, es el producto de las dos funciones de transferencia individuales. Si se necesita la multiplicación de dos funciones de transferencia senoidales, esta puede lograrse multiplicando las fun-ciones de transferencia senoidales en cada frecuencia realizando la multiplicación con álgebra compleja.
Es decir, si:
)()()( 21 ωωω jGjGjG =
Entonces:
( ) ( ) ( )G j G j G jω ω ω= (44)
Donde:
)()()( 21 ωωω jGjGjG −= (45a)
1 2( ) ( ) ( )G j G j G jω ω ω= + (45b)
En la figura 12 se muestra el producto de )().( 21 ωω jGjG
Figura 12.
En general, si se desea un diagrama polar de )().( 21 ωω jGjG es conveniente trazar un diagrama logarítmico de )().( 21 ωω jGjG y luego convertirla en un diagrama polar

Respuesta en Frecuencia de Sistemas Lineales Control I
- 19 -
en lugar de dibujar los diagramas polares )(1 ωjG y de 2 ( )G jω multiplicando estos dos en el plano complejo.
Una ventaja de usar un diagrama polar es que presenta las características de respuesta de frecuencia de un sistema en todo el rango de frecuencias en un único diagrama. Una desventaja es que el diagrama no indica claramente las contribuciones de cada uno de los factores individuales de la función de transfe-rencia de lazo abierto.
5.1- Factores Integral Y Derivativo 1)( ±ωj . El diagrama polar de 1)( =ωjG es el eje imaginario negativo, pues:
1 1 1( ) 90ºG j jj
ωω ω ω
= = − = (46)
El diagrama polar de ωω jjG =)( es el eje positivo imaginario, pues:
( ) 90ºG j jω ω ω= = (47)
5.2- Factores De Primer Orden ( ) 11 ±+ Tjω
Para la función de transferencia senoidal:
1
2 2
1 1( )1 1
G j tg Tj T T
ω ωω ω
−= = −+ +
(48)
Los valores de )( ωjG en 0=ω y T1=ω son respectivamente:
( 0) 1 0ºG j = (49)
Y 1 1 45º
2G j
T⎛ ⎞ =⎜ ⎟⎝ ⎠
(50)
Al tender ω a infinito:
( ) 0 90ºG j∞ = − (51)
El diagrama polar de esta función de transferencia es una semicircunferencia al variar la frecuencia desde cero a infinito, como se ve en la figura 13a. El centro está ubicado en 0.5 sobre el eje real y el radio es igual a 0.5.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 20 -
Figura 13. a: Diagrama polar de )1(1
Tjω+ , b: Diagrama de )( ωjG en el plano x-y.
Para probar que el diagrama polar es una semicircunferencia se define:
jYXjG +=)( ω (52) Donde:
=+
= 2211
TX
ω Parte real de )( ωjG (53)
=+−
= 221 TTY
ωω Parte imaginaria de )( ωjG (54)
Entonces se obtiene:
22
22
2
22
222
21
111
21
21
⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛+−
+⎟⎟⎠
⎞⎜⎜⎝
⎛+−
=+⎟⎠⎞
⎜⎝⎛ −
TT
TTYX
ωω
ωω (55)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 21 -
Entonces en el plano x-y, )( ωjG es un círculo con centro en X=1/2; Y=0 y con un radio igual a 1/2 como puede verse en la figura 13b. La semicircunferencia inferior corresponde a ∞≤≤ ω0 y la semicircunferencia superior corresponde a 0≤≤∞− ω .
El diagrama polar de la función de transferencia Tjω+1 es simplemente la mitad superior de la línea recta que pasa por el punto (1,0) en el plano complejo y paralelo al eje imaginario, como puede verse en la figura 14. El Diagrama polar de Tjω+1 tiene un aspecto totalmente diferente al de ( ) 11 −+ Tjω .
Figura 14: Diagrama polar de Tjω+1
Si: 2 2 1( ) 1G j j T T tg Tω ω ω ω−= + = 1+ (56)
Para 0=ω : ( 0) 1 0ºG j = (57)
Para ∞=ω : ( ) 90ºG j∞ = ∞ (58)
5.3- Factores Cuadráticos
12
21
±
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
nn
jjωω
ωωδ
Las porciones de alta y baja frecuencia del diagrama polar de la función de transferencia senoidal siguiente:
Respuesta en Frecuencia de Sistemas Lineales Control I
- 22 -
21( ) 0
1 2n n
G j
j j
ω δω ωδω ω
= >⎛ ⎞ ⎛ ⎞
+ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(59)
Están dadas respectivamente por:
0lim ( ) 1 0ºG jω
ω→
= y lim ( ) 0 180ºG jω
ω→∞
= −
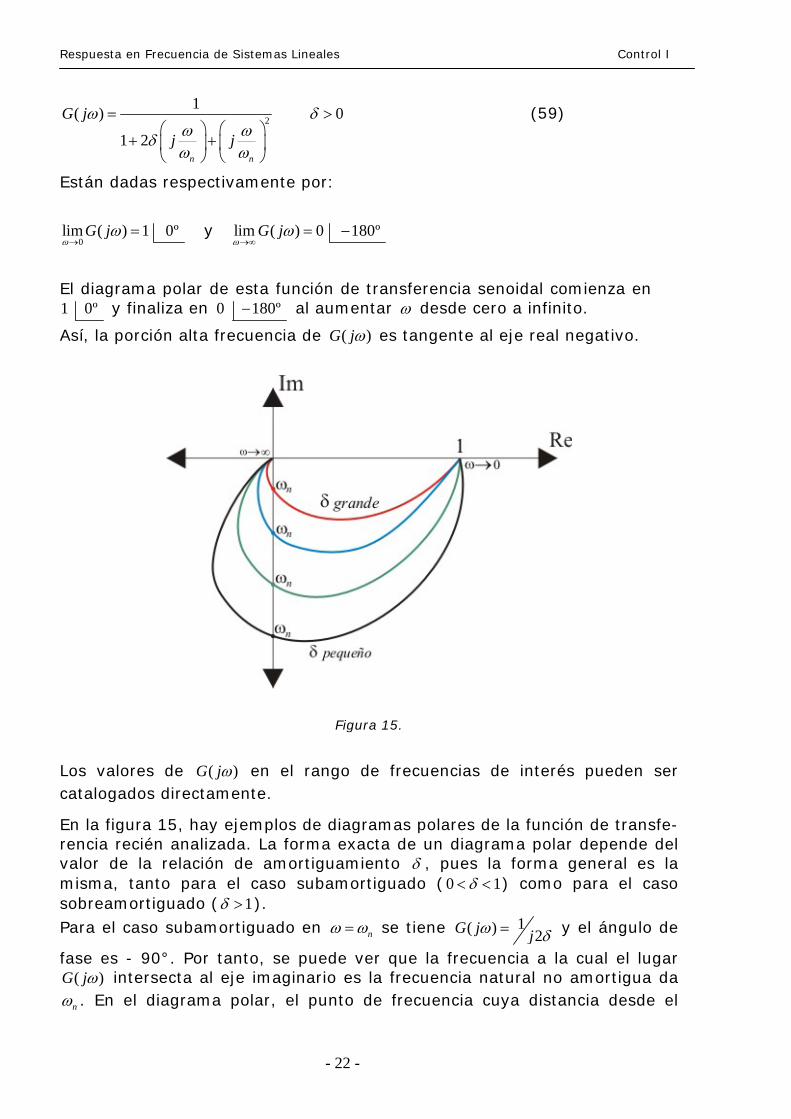
El diagrama polar de esta función de transferencia senoidal comienza en 1 0º y finaliza en 0 180º− al aumentar ω desde cero a infinito.
Así, la porción alta frecuencia de ( )G jω es tangente al eje real negativo.
Figura 15.
Los valores de ( )G jω en el rango de frecuencias de interés pueden ser catalogados directamente.
En la figura 15, hay ejemplos de diagramas polares de la función de transfe-rencia recién analizada. La forma exacta de un diagrama polar depende del valor de la relación de amortiguamiento δ , pues la forma general es la misma, tanto para el caso subamortiguado (0 1δ< < ) como para el caso sobreamortiguado ( 1δ > ). Para el caso subamortiguado en nω ω= se tiene 1( ) 2G j jω δ= y el ángulo de
fase es - 90°. Por tanto, se puede ver que la frecuencia a la cual el lugar ( )G jω intersecta al eje imaginario es la frecuencia natural no amortigua da
nω . En el diagrama polar, el punto de frecuencia cuya distancia desde el

Respuesta en Frecuencia de Sistemas Lineales Control I
- 23 -
origen es máxima, corresponde a la frecuencia de resonancia rω . Se obtiene el valor pico de ( )G jω como la relación entre el módulo del vector a la frecuencia de resonancia y el módulo del vector en 0ω = . Se indica la frecuencia de resonancia en el diagrama polar como puede verse en la figura 16.
Figura 16: Diagrama polar que muestra el pico de resonancia y la frecuencia de resonancia
rω
Para el caso sobreamortiguado, cuando δ es bastante mayor que la unidad el lugar de ( )G jω se aproxima a una semicircunferencia. Se puede ver esto del hecho de que para un sistema fuertemente amortiguado, las raíces características son reales y es una mucho más pequeña que la otra. Como para un valor de δ suficientemente grande el efecto de la raíz más grande en la respuesta se hace muy pequeña, el sistema se comporta como un sistema de primer orden.
Para la función de transferencia senoidal:
2
( ) 1 2n n
G j j jω ωω δω ω
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (60a)
2
2
2( ) 1n n
G j jω δωωω ω
⎛ ⎞ ⎛ ⎞∴ = − +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (60b)
La porción de baja frecuencia de la curva es:
0lim ( ) 1 0ºG jω
ω→
= (61)
Respuesta en Frecuencia de Sistemas Lineales Control I
- 24 -
Y la porción de alta frecuencia es: lim ( ) 180ºG jω
ω→∞
= ∞ (62)
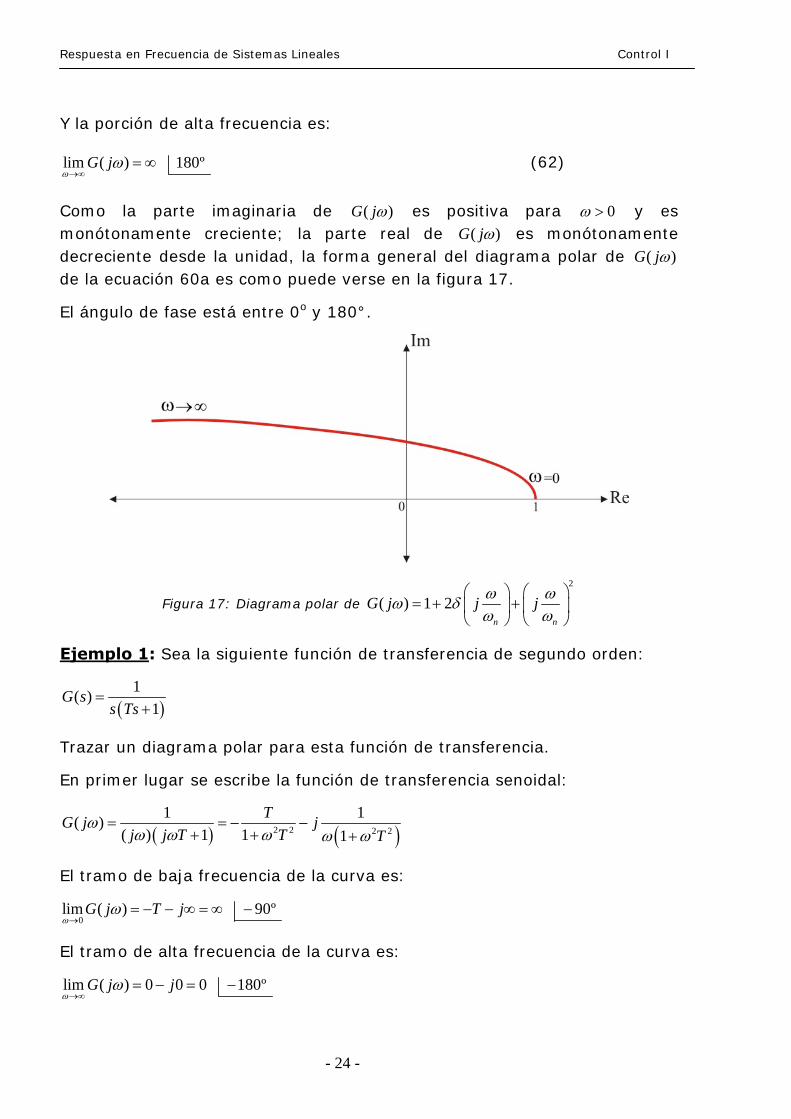
Como la parte imaginaria de ( )G jω es positiva para 0ω > y es monótonamente creciente; la parte real de ( )G jω es monótonamente decreciente desde la unidad, la forma general del diagrama polar de ( )G jω de la ecuación 60a es como puede verse en la figura 17.
El ángulo de fase está entre 0o y 180°.
Figura 17: Diagrama polar de
2
( ) 1 2n n
G j j jω ωω δω ω
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Ejemplo 1: Sea la siguiente función de transferencia de segundo orden:
( )1( )
1G s
s Ts=
+
Trazar un diagrama polar para esta función de transferencia.
En primer lugar se escribe la función de transferencia senoidal:
( ) ( )2 2 2 2
1 1( )( ) 1 1 1
TG j jj j T T T
ωω ω ω ω ω
= = − −+ + +
El tramo de baja frecuencia de la curva es:
0lim ( ) 90ºG j T jω
ω→
= − − ∞ = ∞ −
El tramo de alta frecuencia de la curva es:
lim ( ) 0 0 0 180ºG j jω
ω→∞
= − = −

Respuesta en Frecuencia de Sistemas Lineales Control I
- 25 -
En la figura 18 se muestra la forma general del diagrama polar ( )G jω .El diagrama de ( )G jω es asintótico a la recta vertical que pasa por el punto (-
T, 0). Como esta función de transferencia involucra integración ( 1s ), la
forma del diagrama polar difiere sustancialmente de las funciones de transferencia que no tienen integración.
Figura 18.
5.4- Retardo De Transporte.
Algunos elementos en los sistemas de control se caracterizan por su tiempo muerto o retraso de transporte, durante el cual no dan salida a la señal de entrada que se les haya aplicado; hay un periodo muerto de inactividad que demora la transmisión de la señal recibida. La figura 19 muestra el diagrama de bloques del elemento demorador.
Figura 19.
La figura 20 indica la salida ( ) ( ). ( )c t r t T u t T= − − que tiene la misma forma que la entrada, pero demora un tiempo T. La demora es una característica no lineal que, afortunadamente, puede ser representada por su transformada de Laplace. Así:
( )( )( )
stC sG s eR s
−= = (63)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 26 -
Figura 20.
( ) j TG j e ωω −∴ = (64)
Puede ser escrito:
( ) 1 cosG j T j sen Tω ω ω= − (65)
Como el módulo ( )G jω es simple la unidad y el ángulo de fase varía linealmente con ω , el diagrama polar del retardo de transporte es un círculo de radio unitario, como puede verse en la figura 21.
Figura 21: Diagrama polar del retardo de transporte.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 27 -
A frecuencias bajas, el retardo de transporte j Te ω− y el retardo de primer orden 1 (1 )j Tω+ se comportan en forma similar, lo que puede verse en la figura 22.
Figura 22: Diagramas polares de j Te ω− y 1 (1 )j Tω+
Los diagramas polares de j Te ω− y 1 (1 )j Tω+ son tangentes entre sí en 0ω = . Puede verse esto del hecho que para 1 Tω :
1j Te j Tω ω− = − y 1 11
j Tj T
ωω
= −+
Sin embargo, para 1 Tω ; hay una diferencia esencial entre j Te ω− y 1 (1 )j Tω+ como puede verse también en la figura 22.
Ejemplo 2: Obtener el diagrama polar de la siguiente función de transferencia
( )1
j LeG jj T
ω
ωω
−
=+
Se puede escribir:
1( )1
j LG j ej T
ωωω
− ⎛ ⎞= ⎜ ⎟+⎝ ⎠
Respuesta en Frecuencia de Sistemas Lineales Control I
- 28 -
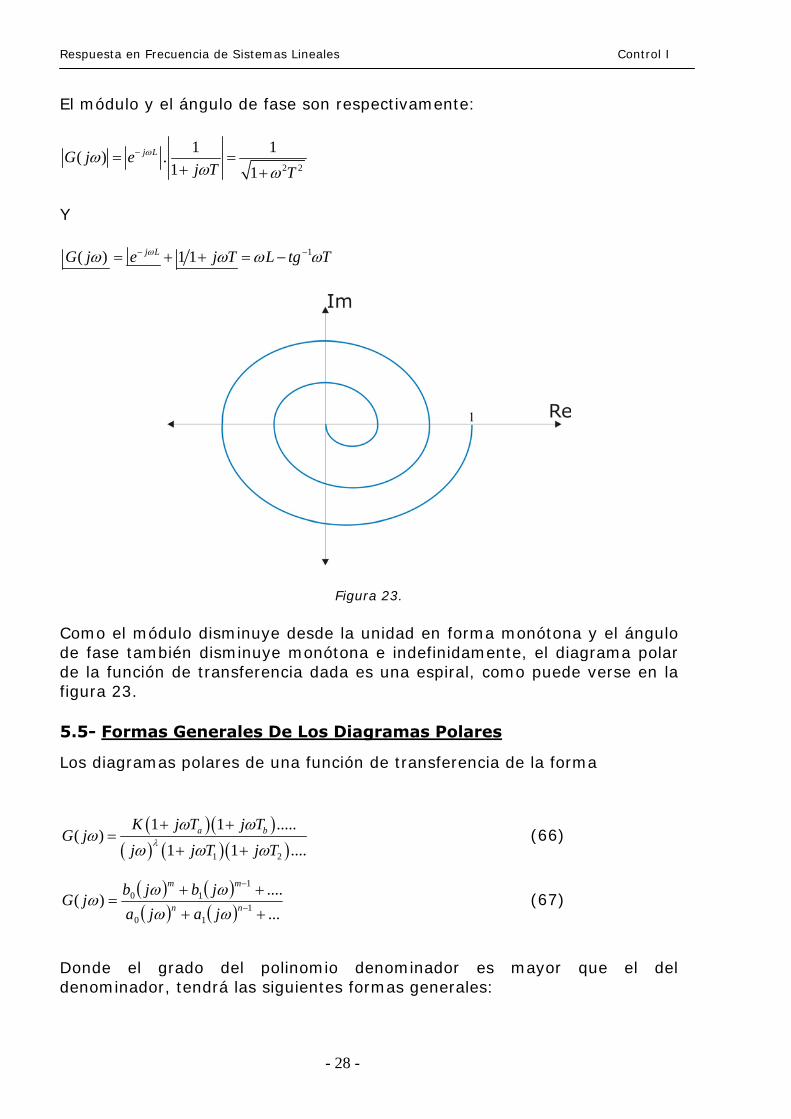
El módulo y el ángulo de fase son respectivamente:
2 2
1 1( ) .1 1
j LG j ej T T
ωωω ω
−= =+ +
Y
1( ) 1 1j LG j e j T L tg Tωω ω ω ω− −= + + = −
Figura 23. Como el módulo disminuye desde la unidad en forma monótona y el ángulo de fase también disminuye monótona e indefinidamente, el diagrama polar de la función de transferencia dada es una espiral, como puede verse en la figura 23.
5.5- Formas Generales De Los Diagramas Polares
Los diagramas polares de una función de transferencia de la forma
( )( )( ) ( )( )1 2
1 1 .....( )
1 1 ....a bK j T j T
G jj j T j Tλ
ω ωω
ω ω ω
+ +=
+ + (66)
( ) ( )( ) ( ) ...
....)( 1
10
110
++
++= −
−
nn
mm
jajajbjb
jGωωωω
ω (67)
Donde el grado del polinomio denominador es mayor que el del denominador, tendrá las siguientes formas generales:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 29 -
1 - Para 0λ = o sistemas de tipo 0: el punto de iniciación del diagrama polar (que corresponde a 0ω = ) es finito y está sobre el eje positivo real. La tangente al diagrama polar en 0ω = es perpendicular al eje real. El punto terminal que corresponde a ω = ∞ , está en el origen y la curva converge al origen y es tangente a uno de los ejes.
2 - Para 1λ = o sistemas tipo 1: el término jω en el denominador contribuye -90° al ángulo de fase total de ( )G jω para 0 ω≤ ≤ ∞ . En 0ω = , el módulo de ( )G jω es infinito y el ángulo de fase es -90°. A frecuencias bajas, el diagrama polar es asintótico a una línea paralela al eje imaginario negativo. En ω = ∞ , el módulo se hace cero y la curva converge al origen y es tangente a uno de los ejes.
3 - Para 2λ = o sistemas tipo 2: el término jω en el denominador contribuye -180° al ángulo de fase total de ( )G jω para 0 ω≤ ≤ ∞ . En 0ω = , la amplitud de ( )G jω es infinita y el ángulo de fase es igual a -180°. En bajas frecuencias, el diagrama polar es asintótico a una línea recta paralela al eje real negativo. En ω = ∞ , el módulo se hace cero y la curva es tangente a uno de los ejes.
En la figura 24, se ven las formas generales de las porciones de baja frecuencia de los diagramas polares de los sistemas tipo 0, tipo 1 y tipo 2. Se puede ver que si el arado del polinomio denominador de ( )G jω es mayor que el del numerador, los lugares de ( )G jω convergen al origen en sentido horario. En ω = ∞ , los lugares son tangentes a uno u otro de los ejes, como se ve en la figura 25.
Figura 24: Diagramas polares de sistemas tipo 0, tipo 1 y tipo 2.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 30 -
Para el caso en que los grados del polinomio numerador y denominador de ( )G jω son iguales, el diagrama polar comienza a una distancia finita sobre el
eje real y finaliza en un punto sobre el eje real.
Figura 25: Diagramas polares de funciones de transferencia con dinámica de numerador.
Se hace notar que cualquier forma complicada de las curvas de los diagramas polares es causada por la dinámica del numerador, es decir, por las constantes de tiempo del numerador de la función de transferencia. En la figura 26 se ven ejemplos de diagramas polares de funciones de transferencia con dinámica de numerador.
Figura 26: Diagramas polares de funciones de transferencia con dinámica de numerador.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 31 -
Al analizar sistemas de control, hay que determinar con exactitud el diagrama polar de ( )G jω en el rango de frecuencias de interés.
En la tabla 1 se adjuntan distintos diagramas polares para diversas funcio-nes de transferencia.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 32 -
Factor Lugar Polar de la Respuesta
a 1
1 Ts+
b 1 Ts+
c 1Ts
, 2 2
1T s
d Ts , 2 2T s
e ( )21
1 Ts+
como g, con 1δ =
f ( )( )1 2
11 1T s T s+ +
como g, con 1δ >
g
2 2
11 2
1
n
Ts T s
Tω
+ +
=
Tabla 1.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 33 -
5.6 - El Efecto De Factores ( )Ts+1 En El Numerador De La Función De Transferencia.
La curva polar de la respuesta de frecuencia de una función de transferencia como la de la figura 27, está situada totalmente en el cuarto cuadrante, con un atraso de fase que se aproxima a 90° con frecuencias de entrada muy elevadas.
Figura 27: Representación polar de Ts
K+1
La gráfica para un simple sistema de segundo orden, figura 28, ocupa el ter-cero y cuarto cuadrante, con un ángulo de fase que se aproxima a -180° para frecuencias de entrada muy elevadas.
Figura 28: Representación polar de un sistema de segundo orden.
El lugar de la respuesta a la frecuencia de un sistema simple de tercer orden cuya función de transferencia sea:
( )( )( )sTsTsTsH
sRsC
321 1111)(
)()(
+++== (68)
O

Respuesta en Frecuencia de Sistemas Lineales Control I
- 34 -
( )( )22221 211
1)()()(
sTsTsTsH
sRsC
+++== (69)
Ocuparía el segundo, tercero y cuarto con un ángulo de atraso que se aproxima a -270° para frecuencias de entrada muy elevadas como se ilustra en la figura 29a.
Figura 29. Esto indica que cada factor ( )Ts+1 en el denominador de la función de trans-ferencia contribuye con un atraso de fase que se aproxima a 90° para altas frecuencias, llevando a la gráfica a ocupar un cuadrante adicional en el sentido horario.
Se vio que un factor ( )Ts+1 en el numerador, expresado en forma polar, tiene un ángulo de fase positivo asociado a él, por ejemplo:
TjjRjCTs
sRsC ω
ωω
+=⇒+= 1)()(1
)()( (70)
Que tiene una relación de magnitud y fase:
221)( TjM ωω += (71)
Ttg ωωφ 1)( −= (72) Y por lo tanto su característica de frecuencia ocupa el primer cuadrante del gráfico polar, como se ve en la figura 29b.
La fase positiva de un factor ( )Ts+1 es llamada fase de adelanto, y se aproxima a 90° para altas frecuencias.
La adición de un factor de adelanto de fase ( )Ts+1 a una función de transferencia conteniendo factores de atraso de fase, afecta la relación de magnitud de la misma, y más significativamente, la fase.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 35 -
El efecto es disminuir el atraso de fase debido a los factores en el denominador. Esta acción puede ser ilustrada considerando la función de transferencia:
( )( )( )sTsT
sTsKR
sCsG32
1
111
)()()(
+++
== (73)
Si el factor ( )sT11+ no figurara, el lugar de la respuesta de frecuencia ocuparía el tercer y cuarto cuadrante. La adición de ( )sT11+ en el numerador cambia la relación de magnitud, y reduce la fase para una frecuencia particular ω de acuerdo a:
)()()()( 321 ωφωφωφωφ −−= Donde:
311
3
21
2
11
1
)(
)(
)(
Ttg
Ttg
Ttg
ωωφ
ωωφ
ωωφ
−
−
−
=
=
=
Por lo que el factor en el numerador tiende a restringir el lugar al cuarto cuadrante solamente. Los valores relativos de 1T , 2T y 3T dictan si el lugar está totalmente confinado al cuarto cuadrante, o si se extiende en el primer y/o tercer cuadrante. En el caso límite, cuando 21 TT = o 3T , la función de transferencia se reduce a la forma:
( )TssKRsCsG
+==
11
)()()( (74)
La cual ocupa solamente el cuarto cuadrante.
Cada factor en el numerador de la función de transferencia actúan compensando (o contrarrestando) un factor similar en el denominador, y por lo tanto actúa para restringir el lugar de la respuesta de frecuencia polar a un cuadrante menor que es indicado por los factores en el denominador.
Ejemplo 3: Un sistema tiene la función de transferencia:
( )( )( )sTsT
sTKsRsC
32
1
111
)()(
+++
= (75)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 36 -
Donde:
segTsegTsegT
K
04.02.01.0
20
3
2
1
====
Establecer la característica de respuesta del sistema en forma polar. Para el análisis de respuesta de frecuencia de estado estacionario, s es reemplazado por ωj , por lo tanto:
( )( )( )32
1
11120
)()(
TjTjTj
jRjC
ωωω
ωω
+++
= (76)
La cual es una relación de números complejos (vectores) de la forma RQP , donde:
3
2
1
1
1
1
TjR
TjQ
TjP
ω
ω
ω
+=
+=
+=
En notación polar, la magnitud y ángulo de cada uno es:
312
32
212
22
112
12
,1
,1
,1
TtgTR
TtgTQ
TtgTP
ωω
ωω
ωω
−
−
−
+=
+=
+=
Y la relación de magnitud es:
( )( )( )2
322
22
21
2
11
120)()()(
TT
TjRjCM
ωω
ωωωω
++
+== (77)
Y la fase:
31
21
11)( TtgTtgTtg ωωωωφ −−− −−= (78)
Reemplazando 1T , 2T y 3T por sus valores:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 37 -
( )( )( )22
2
0016.0104.01
01.0120)()()(
ωω
ωωωω
++
+==
jRjCM (79)
ωωωωφ 04.02.01.0)( 111 −−− −−= tgtgtg (80)
Para varios valores de [ ]segradω , se puede obtener la siguiente tabla:
ω 0 1 2 5 10 15 20 30 40 50 100 ∞
M 20 19.7 18,4 15,5 11,6 9,75 8,6 6,7 5,42 4,54 2,4 0
φ 0 -8,2 -15,2 -30 -40 -46 -51 -59,5 -65 -69 -76 -90
Tabla 2.
La figura 30 muestra la representación polar de la función de transferencia propuesta.
Figura 30: Representación polar de ( )
( )( )32
1
11120
TjTjTjωω
ω++
+
5.7 - El Efecto De Los Ceros Y Polos En El Origen En La Función De Transferencia. Una función de transferencia puede contener factores de la forma:
Ts1 ; 2
1Ts
etc. O bien Ts ; 2Ts ; etc.
Tales factores aparecerán frecuentemente en los modelos matemáticos de los sistemas de control a estudiar, y se los conoce con el nombre de ceros y polos en el origen de la función de transferencia.
Si se considera el polo simple en el origen:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 38 -
TssG 1)( =
Para el análisis de respuesta en frecuencia:
TjjG
ωω 1)( = (81)
Donde, en forma polar:
TTjG
ωωω 1
11)(
22=
+= (82)
º9000
0 111 −=∞−=−=−= −−− tgTtgTtg ωωφ (83)
Lo que indica que produce un atraso de 90° para todas las frecuencias, por lo tanto la respuesta de frecuencia está sobre el eje de los 270° = - 90o
Además para, ∞=)( ωjG y para ∞=ω , 0)( =ωjG El lugar del polo simple es mostrado en la figura 31a.
Se puede demostrar en forma similar que el polo doble en el origen ( )221 Ts tiene lugar de la respuesta de frecuencia polar que comienza en ∞ para
0=ω sobre el eje de 180° = - 180° y prosigue a lo largo de este eje hacia el origen cuando ω tiende a aumentar, alcanzando el mismo para ∞=ω , el lugar del polo doble en el origen está mostrado en la gráfica 31 b.
Figura 31: a) Gráfica polar de sT1 , b) Gráfica polar de 221 Ts

Respuesta en Frecuencia de Sistemas Lineales Control I
- 39 -
Cuando se tiene un cero simple en el origen Ts , la representación frecuencial es un fasor complejo con parte real e igual a cero, y por lo tanto el lugar está a lo largo del eje imaginario.
TjjGTssG ωω =∴= )()( (84)
TTjG ωωω == 22)( (85)
º900
)( 11 +=∞== −− tgTtg ωωφ (86)
La fase será entonces + 90° para cualquier valor de ω . Además para 0=ω , 0)0( =jG y para ∞=ω , ∞=∞)( jG , tal gráfica se muestra en la figura 32.
Figura 32: Gráfica polar de Ts
5.8 - Trazados Polares Inversos.
Los trazados polares vistos anteriormente se los conoce con el nombre de traza dos polares directos. Los trazados polares directos tienen ciertas desventajas en sistemas que tienen elementos diversos en el lazo de realimentación, dejando de ser ésta unitaria. En estos casos se ha encontrado que es mucho más sencillo para el análisis gráfico el empleo de trazados polares inversos que presentan ciertas ventajas. Este trazado se obtiene representando el fasor de:
1 1( )( )
G jG j
ωω
− = (87)
En función de la frecuencia.
Respuesta en Frecuencia de Sistemas Lineales Control I
- 40 -
6 - Gráficos Rectangulares. 6.1 - Introducción. Los resultados obtenidos al realizar el análisis frecuencial, pueden ser graficados en coordenadas rectangulares. La relación de magnitud ( )M ω y el ángulo de fase ( )φ ω se grafican contra la frecuencia. Es normal y conveniente hacer los gráficos contra
10log ω
En el caso de los ángulos de fase ( )φ ω se usa una escala lineal, de modo que la gráfica de ( )φ ω contra ω se hace en papel semilogarítmico. En el caso de la relación ce magnitud ( )M ω puede graficarse de dos formas: se puede tomar
10( )log M ω , en cuyo caso la gráfica de ( )M ω contra ω se hace
en papel log-log; o puede expresarse ( )M ω en decibeles, una unidad logarítmica, y graficarse sobre una escala lineal (o sea, sobre papel semilogarítmico). El caso más común de gráfica rectangular es la que emplea ( )M ω en decibeles, porque permite graficar en la misma hoja tanto ( )M ω y ( )φ ω contra
10log ω ; esta gráfica es conocida con el nombre de diagrama de Bode
y se estudiara en el próximo apartado.
Se definirá ahora, ya que será de uso permanente en todo el estudio que se realizará, la unidad logarítmica conocida como decibel.
El uso del término decibel, se debe a que la relación de magnitud fue empleada en principio como ganancia en los amplificadores electrónicos, los cuales tuvieron sus primeras aplicaciones en la amplificación de señales eléctricas para su conversión en sonidos audibles„ El oído humano responde a los estímulos en una escala logarítmica. Si M es una magnitud y m es dicha magnitud en decídeles (dB), entonces:
1020logm M= [ ]m dB=
Ejemplos: M=1 m=20log 1= 20(0)= 0 dBM=10 =20log 10=20 (l)= 20 dBM=100 m=20log 100=20(2)= 40 dBM=0.1 =20log 0.1=20(- l)= -20 dBM=0.2 m=20log 0.2=20(-0,099) = -13,98 dB
m
m
⇒⇒⇒⇒⇒
La conversión de magnitud a dB se facilita por el uso de gráficos y tablas. En la figura 33 se muestra un gráfico que permite convertir números en decídeles.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 41 -
Se puede hacer notar que dado un número, el recíproco tiene el mismo número de decibeles pero con el signo opuesto. Así el valor en decídeles de 2 es +6 dB y el de 0,5 será de —6 dB.
Cuando un número se duplica, su valor en decibeles aumenta en 6 dB. El número 2 es el doble de 1, y su valor logarítmico es 6 decibeles mayor. El número 200 es el doble de 100, y su expresión logarítmica 6 dB mayor.
Cuando un número hace 10 veces mayor su expresión logarítmica aumenta en 20 dB. El número 100 es diez veces mayor que 10 y su expresión logarítmica es 20 dB mayor que la de 10. El número 200 es cien veces mayor que 2, su expresión loga rítmica es 40 dB mayor.
10-2 10-1 100 101-40
-30
-20
-10
0
10
20
Números
Dec
ibel
es, d
B
Figura 33: Recta de conversión números-decibeles.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 42 -
6.2 - Diagrama de Bode. El análisis y la predicción del comportamiento dinámico de sistemas estudiando su respuesta a la frecuencia puede llevarse a cabo usando gráficas en coordenadas rectangulares, aparte de las gráficas polares ya estudiadas. Otra vez, las cantidades a estudiar son las relaciones de magnitud y fase de la respuesta a la frecuencia de lazo cerrado (más adelante, cuando se estudie el capitulo de estabilidad de componentes y sistemas, se verá la utilidad de la representación frecuencial de la función de transferencia de lazo abierto), Un diagrama logarítmico o de Bode es una representación de respuesta a la frecuencia que consta de dos gráficos: uno que da la amplitud en función de la frecuencia (diagrama de atenuación de Bode) y otro el ángulo de fase en función de la frecuencia. El trazado del diagrama de atenuación se realiza en papel semilogarítmico, colocando en ordenadas el módulo de la amplitud de la función de transferencia a representar en decibeles y en abscisas el logaritmo de la frecuencia. El trazado del diagrama de fase se realiza también en papel semilogarítmico colocando en la ordenada la fase de la función de transferencia a representar en grados y en abscisas el logaritmo de la frecuencia. La ventaja principal de usar el diagrama de Bode en lugar de la gráfica en coordenadas polares radica en la mayor facilidad de la construcción de las gráficas. Los sistemas de control están compuestos, a menudo, por componentes que son aproximados por bloques que tienen funciones de transferencia formadas por constantes, K , integraciones, s1 , diferenciaciones, s , constantes de tiempo, ( ) 11 ±±Ts , y factores cuadráticos,
( ) 122 2 ±++ nn ss ωδω . El diagrama de Bode permite la superposición sistemática
de los efectos de los diferentes elementos tomados individualmente. Además, los diagramas de atenuación de Bode y las gráficas del ángulo de fase pueden obtenerse a partir del análisis experimental de la frecuencia de los componentes para los que no se conocen las funciones de transferencia reales. Las gráficas pueden usarse para establecer las relaciones de transferencia reales de s . Es también útil la representación logarítmica de Bode, porque presenta las características de alta y baja frecuencia de la función de transferencia en un solo diagrama. Es muy ventajoso el poder expandir el rango de bajas frecuencias utilizando una escala logarítmica de frecuencias, ya que a frecuencias bajas son muy importante las características de los sistemas utilizados (debido al uso de escala de frecuencia logarítmica es imposible trazar las curvas de hasta frecuencia cero; sin embargo esto no crea un problema importante). Se verá a continuación los conceptos teóricos de diagrama de Bode, incluyendo su construcción, además del análisis experimental de la respuesta frecuencial. En el próximo capítulo, cuando se estudien los conceptos de estabilidad de sistemas y componentes, se estudiará el uso en el análisis de estabilidad a los diagramas de Bode.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 43 -
6.3- Conceptos Básicos Sobre los Diagramas de Atenuación de Bode. La ventaja de los trazados logarítmicos es que las operaciones de multiplicación y división se convierten en otras de suma o resta y que el trabajo para obtener la representación frecuencial es más bien gráfica que analítica. Los factores básicos que usualmente aparecen en las funciones de transferencia pueden ser aproximados por asuntotas, para una primer estimación y luego se traza la curva exacta para una mayor exactitud. Como ya se ha visto anteriormente, la función de transferencia de un sistema resultante de reemplazar s por ωj es, en general, un número complejo. El logaritmo neperiano, base e, de un número complejo es, a su vez, otro número complejo: [ ] )()( ln)(ln)(ln ωφωφ ωω jj ejMejM += (88)
[ ] )()(ln)(ln )( ωφωω ωφ jjMejM j += (89)
El logaritmo del número complejo )()( ωφω jejM tiene una parte real igual al
logaritmo neperiano de la magnitud )(ln ωjM y una parte imaginaria igual al ángulo )(ωφj expresado en radianes. Ambos componentes son función de la frecuencia ω . De igual forma, el logaritmo decimal, base 10, de un número complejo es también otro número complejo:
[ ] )()( log)(log)(log ωφωφ ωω jj ejMejM += (90)
[ ] )(434.0)(log)(log )( ωφωω ωφ jjMejM j += (91) Como podía preverse, la parte real es igual al logaritmo decimal de la magnitud, )(log ωjM , y la parte imaginaria es )(434.0 ωφ , empleándose en el resto de este estudio solamente la parte proporcional igual a )(ωφ omitiéndose, por tanto, el factor 0,434. También se puede llegar a igual conclusión siguiendo la teoría de la variable compleja que establece que el logaritmo de un número complejo es otro número complejo. Si es: )()()( ωβωαω jjM += (92) Será entonces:
[ ]njRjM πωφωω 2)()(log)(log ++= (93) Para n=1, 2,… Y donde:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 44 -
)()()( 22 ωβωαω +=R y )()()( 1
ωαωβωφ −= tg
El ángulo nπ2 esta presente debido a la existencia de posibilidades de tener el vector en el mismo lugar sobre el plano complejo. Nuevamente, el logaritmo de )( ωjM está compuesto por dos funciones de ω , la parte real: )(log ωR y la parte imaginaria: )(ωφ en contra del logaritmo de ω . Si se admite que una forma general de expresar la función de transferencia de un sistema controlado es la siguiente relación de valores reales y complejos:
)()()()(
)(21
21
ωωωω
ωjDjDjNjN
KjM = (94)
Entonces ahora siguiendo los axiomas de logaritmos:
)(log)(log)(log)(loglog)(log 2121 ωωωωω jDjDjNjNKjM −−++= (95)
[ ])()(log)()(log
)()(log)()(loglog)(log
21
21
21
21
ωφωωφω
ωφωωφωω
jjDjjD
jjNjjNKjM
DD
NN
+++−
−++++= (96)
[ ])()()()()(log)(log)(log)(loglog)(log
2121
2121
ωφωφωφωφωωωωω
jjjjjjDjDjNjNKjM
DDNN −−++
−−++= (97)
Como se sabe la suma de varios números complejos es otro número complejo donde la parte real es la suma de todas las partes reales de los complejos sumados y la parte imaginaria la suma de las partes imaginarias de los complejos sumados.
Esta relación se puede usar ahora para obtener las dos gráficas completas que representan el )(log ωjM . Estas Gráficas serán:
)(log)(log)(log)(loglog)(log 2121 ωωωωω jDjDjNjNKjM −−++= (98)
Y
)()()()()(2121
ωφωφωφωφωφ jjjj DDNN −−+= (99)
La unidad comúnmente empleada en el estudio de sistemas realimentados para el logaritmo del módulo es el decibel. Por lo que la ecuación 98 se puede expresar en decibeles multiplicando ambos miembros por 20:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 45 -
)(log20)(log20
)(log20)(log20log20)(log20
21
21
ωω
ωωω
jDjD
jNjNKjM
−−
++= (100)
Las gráficas de las ecuaciones 99 y 100, son los diagramas de Bode.
Como puede observarse ahora se evidencia la sencillez de graficar un diagrama de atenuación de Bode. Las operaciones de multiplicación y división se han convertido en adición y sustracción. El procedimiento es calcular, o buscar en gráficas o tablas, los valores en decibeles para cada uno de los factores de )( ωjM , para valores específicos de ω y combinarlos algebraicamente.
Como ya se había visto, hay varias maneras de graficar el logaritmo de )( ωjM . Se adoptará el método siguiente de ahora en más: se graficará el
)(log ωjM expresado en decibeles contra ω en papel semilogarítmico. La
ordenada será entonces )(log20 ωjM graficada en divisiones uniformemente espaciadas, mientras que la abscisa es ω , graficada en una escala proporcional al logaritmo. El número de ciclos logarítmicos necesarios en la abscisa se determinará por el rango de frecuencia sobre el cual se va a investigar el sistema. La parte imaginaria )(ωφ se graficará también en papel semilogarítmico, colocando en ordenadas )(ωφ en grados y en la abscisa ω en una escala proporcional al logaritmo.
Es conveniente mencionar en este apartado que hay dos unidades para expresar bandas de frecuencias o cocientes de frecuencias: la octava y la década.
Una octava es una banda de frecuencias de 1ω a 2ω , en la que 212 =ωω . Así la banda de frecuencias entre 1 a 2 c/s es una octava de ancha, y la banda de 2 a 4 c/s tiene también una octava de ancha, lo mismo ocurre en la banda de 17.4 a 34,8 c/s. Nótese que una octava no corresponde a un ancho de banda fijo sino que depende del margen de frecuencias considerado. El número de octavas en un margen de frecuencias, desde 1ω a 2ω viene dado por:
Figura 34.
( )112 loglogloglog ωωωω −=−== jnoctavasdenúmeron (101)
2logloglog 12 noctavasdenúmeron =−== ωω (102)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 46 -
Por lo que:
octavasn2log
log1
2⎟⎟⎠
⎞⎜⎜⎝
⎛
=ωω
(103)
octavasn ⎟⎟⎠
⎞⎜⎜⎝
⎛=
1
2log32.3ωω
(104)
Una década es una banda de frecuencia desde 1ω a 110 ω . Donde nuevamente 1ω es cualquier frecuencia. La banda de frecuencias de 1 a 10 c/s o de 2,5 a 25 c/s tiene un ancho de banda de una década, el número de décadas entre dos frecuencias 1ω y 2ω se calcula del siguiente modo:
Figura 35.
( )112 loglogloglog ωωωω −=−== jndécadasdenúmeron
10logloglog 12 ndécadasdenúmeron =−== ωω
décadasn ⎟⎟⎠
⎞⎜⎜⎝
⎛=∴
1
2logωω
(105)
Se puede ahora obtener la relación entre octavas y décadas entre dos frecuencias de las ecuaciones 104 y 105.
⎟⎟⎠
⎞⎜⎜⎝
⎛=
1
2log32.3ºωω
octavasden
⎟⎟⎠
⎞⎜⎜⎝
⎛=
1
2logºωω
décadasden
O sea: número de octavas = 3,32 número de décadas (106)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 47 -
Estas relaciones entre frecuencias serán usadas más adelante, cuando se dibujen los diagramas de Bode aproximados por asíntotas.
Ejemplo 4: Trazar el-diagrama de Bode para la función de transferencia de lazo abierto del sistema de la figura 36.
Figura 36.
La función de transferencia de lazo abierto es:
( ) )(10
100)()( sG
sssEsB
=+
= ya que se ve en la figura que 1)( =sH
Para realizar el anáisis frecuencial se reemplaza s por ωj :
( )10100)(
+=
ωωω
jjjG
El siguiente paso es normalizar esta función de transferencia, lo que se obtiene dividiendo por 10 el numerador y denominador.
( )ωωω
jjjG
1.0110)(+
=
Entonces será:
( )21.01log20log2010log20)(log20 ωωω +−−=jG
ωπωφ 1.02
0)( tgarc−−=
Que son las expresiones de la parte real e imaginaria del logaritmo de la ecuación 97.
En la siguiente tabla se obtienen valores para el logaritmo del módulo en dB y la fase de las ecuaciones 98 y 99 para varios valores de ω .
Respuesta en Frecuencia de Sistemas Lineales Control I
- 48 -
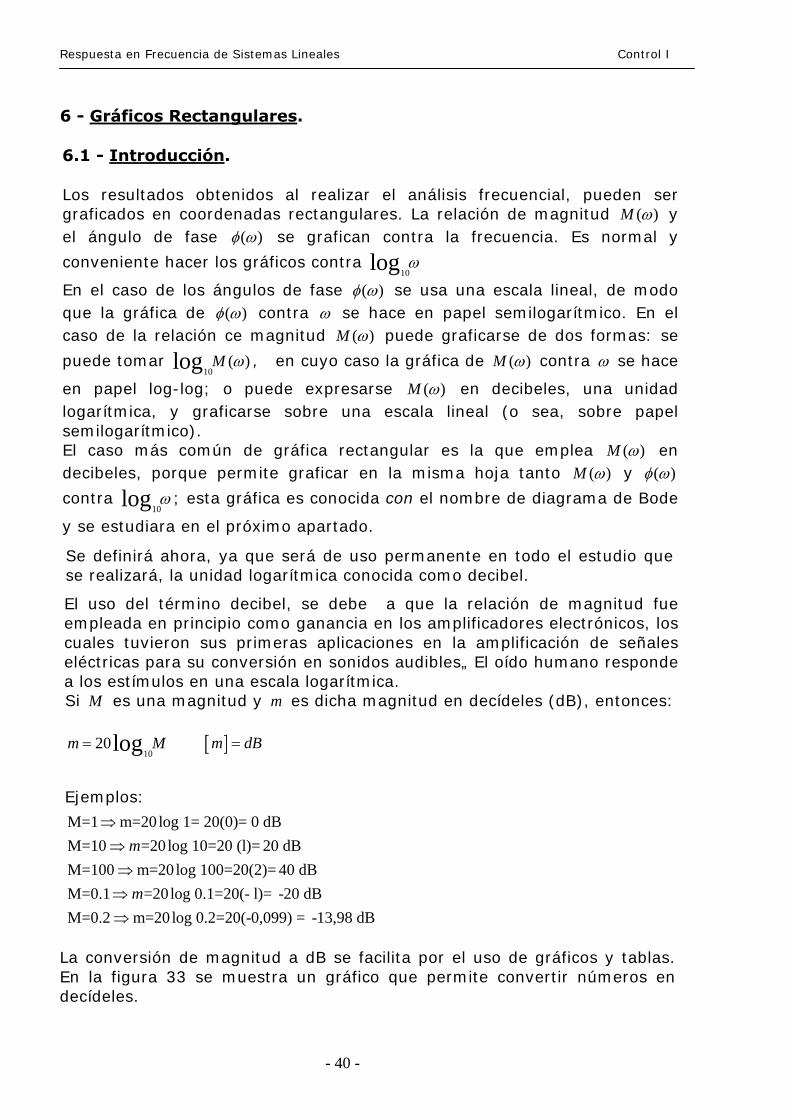
ω dBjG )(log20 ω grados)(ωφ
1 20 - 0 – 0 = 20 - 90 -5.7 = -95.7
5 20 - 13,98 - 1 = 5,02 -90 -26.6 = -116.6
10 20 - 20 - 3 = - 3 -90 -45 = -135
20 20 - 26 - 7 = - 13 -90 -63.4 = -157.4
50 20 - 34 – 14 = - 28 -90 -78.7 = -168.7
Tabla 3
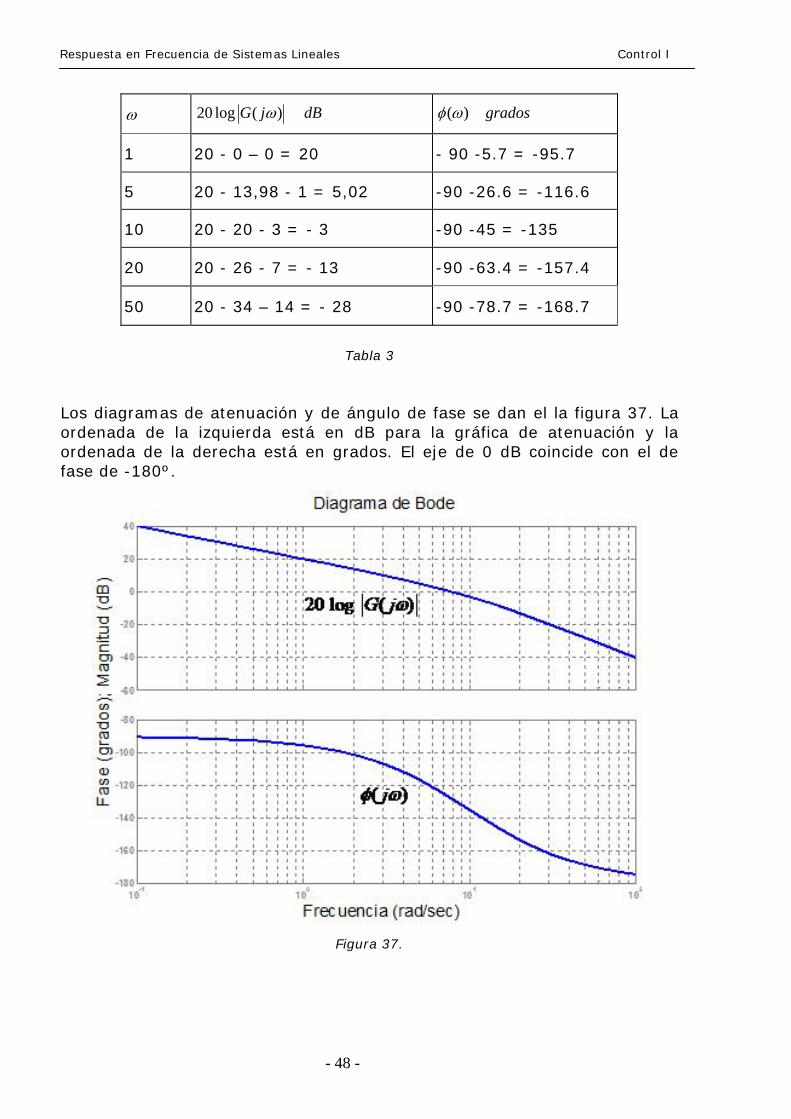
Los diagramas de atenuación y de ángulo de fase se dan el la figura 37. La ordenada de la izquierda está en dB para la gráfica de atenuación y la ordenada de la derecha está en grados. El eje de 0 dB coincide con el de fase de -180º.
Figura 37.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 49 -
6.4- Trazado Asintótico De Los Diagramas Logarítmicos De La Magnitud Y Fase. Simplificaciones Al Establecer Los Diagramas De Bode.
Las funciones de transferencia frecuenciales pueden ponerse en forma generalizada como el cociente de dos polinomios:
( )( )
( ) ( ) ( ))´(
1211
...11)(
22
21 ω
ωω
ωωδωω
ωωω jMK
jjTjj
TjTjKjM
nna
n
m
=
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛++
++= (107)
En el que K es la ganancia. Como se sabe, el logaritmo de esta función de transferencia tendrá una parte real proporcional al logaritmo del módulo y una parte imaginaria proporcional al ángulo.
( )
1 2
22
20 log ( ) 20log 20log 1 20log 1 ...
2 1.. 20log 20log 1 20log 1 ...an n
M j K j T m j T
n j j T j j
ω ω ω
δω ω ω ωω ω
= + + + + +
⎛ ⎞ ⎛ ⎞− − + − + + −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
(108)
( )
1 2
22
( ) 1 1 ....
2 11 1 1 ...a an n
M j K j T m j T
n j j T j T j j
ω ω ω
δω ω ω ω ωω ω
= + + + + +
⎛ ⎞ ⎛ ⎞− − + + − + + −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
(109)
Las dos ecuaciones anteriores sugieren que el logaritmo de ( )M jω podría graficarse sobreponiendo las contribuciones de cada uno de los factores de
( )M jω . El proceso de establecer los diagramas de atenuación y fase de Bode, puede simplificarse y hacerse más rápido en virtud de que los factores de la función de transferencia que se encuentran usualmente, sen de la forma de los mostrados en la ecuación 107. El logaritmo de cada uno de estos factores, cuando se grafican separadamente contra el logaritmo de la frecuencia, presenta ciertas características: Con un conocimiento del comportamiento de cada factor, es posible construir un diagrama de Bode aproximado para una ( )M jω dada trazando las curvas para cada factor y sumando las curvas individuales gráficamente porque sumar logaritmo de ganancias, corresponde a multiplicarlas entre sí.
Se puede simplificar aún más el proceso de obtener el diagrama logarítmico utilizando aproximaciones asintóticas a las curvas de caca factor. Es posible, como se verá, ajustar el diagrama asintótico para que de la gráfica real con el uso de factores de corrección simples. El primer paso para simplificar el trazo de los diagramas de Bode, es analizar el comportamiento de cada uno de los factores intervinientes en la ecuación 107.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 50 -
6.4.1.- Diagrama De Bode De Una Constante K
La ganancia constante K puede pensarse como un número complejo con parte imaginaria nula. La parte real puede ser un número positivo o negativo que representa un vector de magnitud K y que se encuentra sobre el eje real. Debido a que K es independiente de ω . El diagrama de atenuación de Bode es una recta horizontal. El ángulo de fase es 0° si K es positivo y -180 ° si K es negativo. Un número mayor que la unidad tendrá un valor en decibeles mayor que cero, mientras que un número menor que la unidad tendrá un valor negativo en decibeles.
El efecto de variar la ganancia K en la función de transferencia, es que sube o baja la curva de logaritmo de magnitud de la función de transferencia en el valor constante correspondiente, pero no tiene efecto en el ángulo de fase.
La figura 38, muestra los diagramas de atenuación y fase para un valor de K mayor que la unidad.
100
101
102
0
5
10
15
20
25
30
35
40
Am
plitu
d, d
B
Frecuencia, rad/s
K [dB]

Respuesta en Frecuencia de Sistemas Lineales Control I
- 51 -
100 101 102-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Fase
, Gra
dos
Frecuencia, rad/s
Figura 38: Diagrama de Bode para una constante K
6.4.2.- Diagrama De Bode De Factores Derivativos E Integral ( ) njω ± (ceros y polos en el origen)
Los diagramas de atenuación y ángulo de fase para un elemento integrador 1( )jω − o un elemento diferenciador ( )jω son rectos.
Se considerará en primer lugar el diagrama de atenuación en decibeles contra el lazo ω .
Para una integración:
120log 20logj
ωω
= − (110)
Y para una diferenciación: 20log 20logjω ω= (111) Corno se ve ambas ecuaciones son representaciones de rectas.
La pendiente de estas rectas se obtiene derivando las ecuaciones anteriores respecto a logω , es decir:
( ) 120 log20
log
jdB
ω
ω
±∂= ±
∂ (112)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 52 -
Luego en coordenadas rectangulares, a un incremento unitario de logω le corresponderá un incremento de 20 dB± . Por otro lado un incremento unitario de logω es equivalente a un cambio de 1 a 10, de 10 a 100, etc. en la escala logarítmica. Luego la pendiente de estas rectas es 20 /dB década± . La figura 39 representa las pendientes de un factor integral y de un factor derivativo.
10-1 100 101 102-40
-30
-20
-10
0
10
20
30
40
Am
plitu
d, d
B
Frecuencia, rad/s
| jω |
| 1/jω |
Figura 39: Diagrama de atenuación de factores integrativos y derivativos.
Si el orden del factor integrativo o derivativo es mayor que uno, entonces se tendrá:
( )20log 20 lognj nω ω± = ± (113)
Que es también la ecuación de una recta cuya pendiente será:
( )20log20
log
njn dB
ω
ω
±∂= ±
∂ (114)
O sea que la pendiente será de 20 /n dB década± .

Respuesta en Frecuencia de Sistemas Lineales Control I
- 53 -
En la figura 40 se muestran les diagramas de atenuación para factores integrativos y derivativos ( ) njω ± hasta n igual a cuatro.
10-1 100 101 102-200
-150
-100
-50
0
50
100
150
200
Am
plitu
d, d
B
Frecuencia, rad/s
| jω |
| 1/jω |
| 1/(jω )2 |
| 1/(jω )3 |
| 1/(jω )4 |
| jω2 |
| jω3 | | jω4 |
Figura 40: diagramas de atenuación para ( ) njω ±
Se reduce del análisis anterior que se ha usado la década como relación de frecuencias, pero se hubiere llegado a idéntico resultado si se hubiera usado la octava como relación de frecuencia.
Si se supone que se quiere obtener la pendiente de una integración, ( ) 1jω − , considerando que la frecuencia se dobla, o sea 2 12ω ω= , entonces:
2 1 1 1
1 1
20log ( 20log ) 20log 2 20log20log 2 20log 20log 20log 2
ω ω ω ωω ω
− − − = − += − − + = −
20log 2 6.02 dB− = (115)
O sea que la pendiente de la recta es -6.02 dB/octava.
Por lo que se puede deducir que para un factor integrativo, ( )jω , se tendrá una representación frecuencial que será una recta con una pendiente de:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 54 -
20 / 6.02 /dB década dB octava− = −
Para factores integrativos o derivativos ( ) njω ± las representaciones serán rectas de pendientes:
20 / 6.02 /ndB década ndB octava± = ±
Se deducirán ahora el valor de la fase para factores integrativos y derivati-vos.
Factor integrativo: 1 11 ( ) 90º0
tg tgj
ωφ ωω
− −⇒ = − = − ∞ = − (117)
Factor derivativo: 1 10( ) 0 90ºj tg tgω φ ωω
− −⇒ = = − = + (118)
Si el orden de los factores integrativos o derivativos es n, entonces:
Factor integrativo: ( )
1 ( ) 90ºn nj
φ ωω
⇒ = − (119)
Factor derivativo: ( ) ( ) 90ºnj nω φ ω⇒ =+ (120)
Por lo que se ve los factores integrativos o derivativos contribuyen con una fase constante igual a 90ºn± como se puede ver en la figura 41.
10-1 100 101 102-360
-270
-180
-90
0
90
180
270
360
Fas
e, G
rado
s
Frecuencia, rad/s
jω
( jω )2
( jω )3
1/( jω )3
1/( jω )2
1/( jω )
Figura 41: Ángulo de fase para factores ( ) njω ± .
Respuesta en Frecuencia de Sistemas Lineales Control I
- 55 -
6.4.3.- Diagramas De Bode Para Factores De Primer Orden ( ) 11 j Tω ±+
Otro factor encontrado comúnmente en las expresiones de funciones de transferencia, es la constante de tiempo conocida generalmente como retardo simple ( ) 11 j Tω −+ o adelanto simple ( )1 j Tω+ .
Se considerará en primer lugar la representación logarítmica del retarde simple. La gráfica de atenuación se obtiene a partir de:
( ) ( )( )2
2
1 120log 20log 20log 11 1
Tj T T
ωω ω
= = − ++ +
(121)
Y el ángulo de fase está dado por:
1( ) tg Tφ ω ω−= − (122)
Ahora el diagrama de Bode puede trazarse fácilmente usando las ecuaciones anteriores, dándole valores a ω .
Es posible, sin embargo, obtener una aproximación asintótica de las curvas de atenuación y de fase, observando el comportamiento de las ecuaciones 121 y 122 a varias frecuencias.
Le ecuación 121 se puede poner:
( )2 2120log 20log 1
1T dB
j Tω
ω= − +
+ (123)
Para valores de ω muy bajos, tales que 1Tω , se puede aproximar el
logaritmo de la amplitud por:
2 220log 1 20log1 0T dBω− + ≅ − = (124)
De la ecuación 124 se deduce que la curva de logaritmo de la amplitud es asintótica a una recta de 0 dB.
Para valores de ω muy altos, tales que 1Tω , la ecuación 123 se puede
poner:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 56 -
2 2 2 220log 1 20log 20logT T T dBω ω ω− + ≅ − = − (125)
Así, de la ecuación 125, se deduce que la curva de logaritmo de la amplitud en altas frecuencias es una recta con una pendiente de -20 dB/década (ó -6 dB/octava).
Del análisis efectuado se concluye que la representación de la curva de respuesta de frecuencia del factor ( ) 11 j Tω −+ puede ser aproximada por dos líneas rectas asintóticas, una a 0 dB/década para el rango de frecuencias 0 1 Tω< < y otra con pendiente -20 dB/década para el rango de frecuencia 1 T ω< < ∞ . La frecuencia a la que se encuentran las dos asíntotas, 1 Tω = , se obtiene igualando las ecuaciones 124 y 125. Esta frecuencia recibe el nombre de frecuencia esquina, corte, ruptura o transición.
La figura 42, muestra el diagrama de atenuación de Bode para un factor ( ) 11 j Tω −+ mostrando las asíntotas de bajas y altas frecuencias y la curva exacta.
10-1 100 101-10
-8
-6
-4
-2
0
2
4
6
8
10
Am
plitu
d, d
B
Frecuencia, rad/s
Trazo exacto
Asíntotas
Figura 42.
Se puede calcular él error en la curva de amplitud producido por el uso de las asíntotas. El error máximo se produce en la frecuencia esquina y es aproximadamente igual a -3 dB, ya que:
( ) TTTT ωωωω log201log20log201log20 2222 ++−=−−+− (126)
Para T1=ω :
dB03.32log101log2011log20 −=−=++− (127)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 57 -
El error a una frecuencia una octava por debajo de la frecuencia esquina, es decir, en T21=ω es:
dB97.025log205.0log20411log20 −=−=++− (128)
El error a una frecuencia una octava por encima de la frecuencia esquina, es decir, en T2=ω es:
dB97.025log202log2012log20 2 −=−=++− (129)
Entonces, el error una octava por debajo o por encima de la frecuencia esquina es aproximadamente igual a -1 dB. En forma similar, el error a una década por debajo o por encima de la frecuencia de transición es aproximadamente igual a -0.04 dB.
El error producido, en decibeles, al usar expresión asintótica para la curva de respuesta de frecuencia de ( ) 11 j Tω −+ aparece en la figura 43. El error es asimétrico con respecto a la frecuencia de corte.
10-2 10-1 100 101 102-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
ω
dB
Figura 43: Error del logaritmo del módulo en la expresión asintótica de la curva de
respuesta de frecuencia de ( ) 11 j Tω −+ , para 1T =

Respuesta en Frecuencia de Sistemas Lineales Control I
- 58 -
Para trazar la curva de fase se sigue un procedimiento similar al empleado para la gráfica del módulo.
La fase para el término estudiado es:
( ) 1 1( ) 1 j T tg Tφ ω ω ω− −= + = −
En esta expresión se puede ver que a frecuencias muy bajas 1Tω ( Tω tiende a cero) el ángulo de fase tiende a 0o.
En la frecuencia esquina, 1Tω = , el ángulo de fase es -45°.
Cuando las frecuencias son elevadas 1Tω ( Tω tiende a infinito) el ángulo de fase tiende a -90°.
En la figura 44 se puede observar las diferencias entre los trazos asintóticos y exactos para la fase del factor ( ) 11 j Tω −+ .
10-2
10-1
100
101
102
-100
-80
-60
-40
-20
0
20
Fase
, Gra
dos
Frecuencia, rad/s
Trazo Asintótico
Trazo Exacto
Figura 44: Ángulo de fase asintótico y exacto para el factor ( ) 11 j Tω −+ .
Como las asíntotas son fácilmente dibujables y suficientemente cercanas a la curva exacta, el uso de esas aproximaciones al trazar los diagramas de Bode es conveniente para establecer rápidamente la naturaleza general de las características de respuesta de frecuencia con una tarea mínima de cálculo, y se la puede utilizar como fase preliminar en el trabajo de diseño. Si se requieren curvas exactas de respuesta de frecuencia, se pueden realizar fácilmente correcciones con referencia a las curvas dadas 125 y 130. En la práctica se puede trazar una curva de respuesta de frecuencia

Respuesta en Frecuencia de Sistemas Lineales Control I
- 59 -
bastante precisa ubicando el punto de -3 dB en la frecuencia esquina y los puntos de -0.04 dB una década por debajo y encima de esa frecuencia y conectando luego esos puntos por una curva suave.
Se debe hacer notar que variar la constante de tiempo T desplaza la frecuencia de esquina a la izquierda o a la derecha, pero las formas de logaritmo de la amplitud y ángulo de fase quedan iguales.
La función de transferencia ( ) 11 j Tω −+ tiene las características de un filtro
pasa bajo. Para frecuencias por encima de 1Tω = , el logaritmo de la
amplitud cae rápidamente hacia menos infinito. Esto es principalmente debido a la presencia de la constante de tiempo. En el filtro pasa bajo, la salida puede seguir fielmente a una entrada senoidal a bajas frecuencias. Pero a medida que se incrementa la frecuencia de entrada, la salida ya no puede seguir a la entrada porque hace falta cierto tiempo para que el sistema llegue a configurar esa amplitud. Así, a altas frecuencias, la amplitud de la salida tiende a cero y el ángulo de fase tiende a -90°. Por tanto, si la función de entrada contiene muchas armónicas, se reproducen fielmente los componentes de baja frecuencia a la salida, mientras que los componentes de alta frecuencia son atenuados en amplitud y desfasados. De modo que un sistema de primer orden da duplicación exacta solamente para fenómenos constantes o lentamente variables.
Una ventaja de la representación logarítmica es que para factores recíprocos, por ejemplo el factor ( )1 j Tω+ , las curvas de logaritmo de la amplitud y ángulo de fase solo cambian de signo.
El módulo de la amplitud para el factor ( )1 j Tω+ en decídeles es:
2 2120log 1 20log 20log 11
j T Tj T
ω ωω
+ = − = ++
(131)
Y el ángulo de fase:
( ) 1( ) 1 1 1j T j T tg Tφ ω ω ω ω−= + = − + = (132)
Para estas ecuaciones se puede hacer idéntico estudio al realizado para el factor de atraso de fase para frecuencias bajas ( 1Tω ) y para frecuencias altas ( 1Tω ). Los resultadas obtenidos serán para el diagrama de atenuación dos rectas, una con pendiente 0 dB/década (para las bajas frecuencias) y la otra con pendiente de +20 dB/década (para las altas frecuencias) siendo la frecuencia de esquina la interacción de estas dos líneas rectas en 1 Tω = . Para el diagrama de fase se obtendrá una gráfica que variará de cero a noventa grados al aumentar la frecuencia de cero a infinito. La figura 45 muestra la curva de logaritmo de la amplitud y las asíntotas y la curva de fase y la asíntota para el factor ( )1 j Tω+ .

Respuesta en Frecuencia de Sistemas Lineales Control I
- 60 -
10-2 10-1 100 101 102-10
0
10
20
30
40
50A
mpl
itud,
dB
Frecuencia, rad/s
Trazo Asintótico
Trazo Exacto
10-2 10-1 100 101 102-20
0
20
40
60
80
100
Fase
, Gra
dos
Frecuencia, rad/s
Trazo Asintótico
Trazo Exacto
Figura 45: Curvas de logaritmo del módulo y fase exactas y asintóticas para el factor ( )1 j Tω+ .
En la figura 46 se muestra la curva de error entre el trazo asintótico de atenuación y la curva exacta en función de la frecuencia.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 61 -
10-2 10-1 100 101 1020
0.5
1
1.5
2
2.5
3
3.5
ω
dB
Figura 46: Curva del error en función de la frecuencia de los lugares de amplitud de
( )1 j Tω+ .
Las formas de las curvas de ángulo de fase son las mismas para cualquier factor de la forma ( ) 11 j Tω ±+ . Por tanto es conveniente tener una planilla para realizar el ángulo de fase. Esa plantilla podrá ser usada repetidamente para construir curvas de ángulo de fase para cualquier función de la forma ( ) 11 j Tω ±+ .
Si se dispone de dicha plantilla, hay que ubicar varios puntos sobre la curva.
Los ángulos de fase para ( ) 11 j Tω ±+ son:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 62 -
145º
126º2
15,7º10
263,4º
1083,3º
paraT
paraT
paraT
paraT
paraT
ω
ω
ω
ω
ω
± =
± =
± =
± =
± =
Se pueden analizar ahora en forma similar términos que tengan la forma ( )1 nj Tω ±+ , realizando también una aproximación asintótica. La frecuencia esquina sigue estando en 1 Tω = y las asíntotas son líneas rectas. La asíntota de baja frecuencia es una línea recta horizontal en 0 dB , mientras que la asíntota de alta frecuencia tiene una pendiente de 20 /ndB década± ó
6 /ndB octava± . El error resultante de las aproximaciones asintóticas es n
veces el correspondiente a ( ) 11 j Tω ±+ . El ángulo de fase es n veces el de
( ) 11 j Tω ±+ en cada punto de frecuencia. En las figuras 47 y 48 se pueden ver los diagramas de atenuación y fase de bode para factores ( )1 nj Tω ±+ hasta n=3.
10-1 100 101-60
-40
-20
0
20
40
60
Am
plitu
d, d
B
Frecuencia, rad/s
n = 1
n = 2
n = 3
n = -1
n = -2
n = -3
Figura 47: Diagramas de atenuación para ( )1 nj Tω ±+ con 1, 2, 3n = ± ± ± .

Respuesta en Frecuencia de Sistemas Lineales Control I
- 63 -
10-1 100 101-270
-180
-90
0
90
180
270 F
ase,
Gra
dos
Frecuencia, rad/s
n = 1
n = 2
n = 3
n = -1
n = -2
n = -3
Figura 48: Diagramas de fase para ( )1 nj Tω ±+ con 1, 2, 3n = ± ± ± .
6.4.4.- Diagramas De Bode Para Factores Cuadráticos Es común que en las funciones de transferencia de Sistemas de control aparezcan factores cuadráticos de la forma:
121
2
2
++ ss
nn ωδ
ω
(130)
Que en forma frecuencial es:
2
21
1
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
nn
jjωω
ωωδ
(134)
Si 1>δ , se puede expresar este factor cuadrático como un producto de dos de primer orden con polos reales. Si 10 << δ este factor cuadrático es el producto de dos factores complejos conjugados. Las aproximaciones asintóticas a las curvas de respuesta de frecuencia, no son exactas para un factor cuadrático con valores bajos de δ . Esto es porque la amplitud y fase del factor cuadrático dependen de la frecuencia esquina y de la relación de amortiguamiento δ . Se puede obtener la curva de respuesta de frecuencia asintótica del siguiente modo; el logaritmo del módulo del factor cuadrático en decibeles es:
Respuesta en Frecuencia de Sistemas Lineales Control I
- 64 -
22
2
2
2 21log20
21
1log20 ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
nn
nn
jj ωωδ
ωω
ωω
ωωδ
(135)
Para frecuencias bajas, tales que nωω << , el logaritmo de la amplitud es:
dB01log20 =− (136) Es entonces la asíntota de baja frecuencia una línea horizontal a 0 dB. Para frecuencias elevadas, tales que nωω >> , el logaritmo de la amplitud es:
dBnn ωω
ωω log40log20 2
2
−=− (137)
La ecuación para la asíntota de alta frecuencia es una línea recta con pendiente de - 40 dB/década en coordenadas semilogarítmicas, pues:
nn ωω
ωω log404010log40 −−=− (138)
La asíntota de baja frecuencia se cortará con la asíntota de alta frecuencia en:
nn
dB ωωωω
=∴−=−= log401log200 (139)
Esta es la frecuencia esquina para el factor cuadrático considerado.
Las dos asíntotas recién consideradas son independientes del valor de δ .
Cerca de la frecuencia nωω = , se produce un pico de resonancia, como es de esperar de la ecuación 134. El factor de amortiguamiento δ determina la amplitud de este pico resonante (recordar sección 5). Obviamente existen errores en la aproximación con líneas rectas asíntotas. El valor del error depende del valor de δ . El error es mayor para valores chicos de δ . La figura 49 muestra las curvas exactas de logaritmo de la amplitud junto con las aproximaciones asintóticas por líneas rectas y las curvas exactas de ángulo de fase para el factor cuadrático dado por la ecuación 134 para distintos valores de δ .
El ángulo de fase del factor cuadrático es:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 65 -
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
∠= −2
12
1
2
21
1)(
n
n
nn
tgjj
ωω
ωωδ
ωω
ωωδ
ωφ (140)
El ángulo de fase es tanto función de ω como de δ . En 0=ω el ángulo de fase se iguala a 0º. En la frecuencia esquina el ángulo de fase es -90º independientemente de δ , pues:
º900
2)( 11 −=∞−=⎟⎠⎞
⎜⎝⎛−= −− tgtg δωφ (141)
En ∞=ω , el ángulo de fase se vuelve -180°. La curva de ángulo de fase es asintótica alrededor del punto de inflexión, el punto conde º90)( =ωφ .

Respuesta en Frecuencia de Sistemas Lineales Control I
- 66 -
10-1
100
101-50
-40
-30
-20
-10
0
10
20M
agni
tud,
dB
Frequencia (Rad/s)
δ = 0,1
δ = 0,3δ = 0,2
δ = 0,5δ = 0,7δ = 1
10-1
100
101-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Fase
(Gra
dos)
Frequencia (Rad/s)
δ = 0,1δ = 0,2δ = 0,3
δ = 0,5δ = 0,7δ = 1
Figura 49: Curvas del logaritmo del módulo junto con las asíntotas y las curvas de fase de
la función de transferencia dada por la ecuación 134.
Las correcciones para el paso de los valores dados por las asíntotas a las curvas reales se dan el la figura 50.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 67 -
10-1 100 101-6
-4
-2
0
2
4
6
8
10
12
14
ω/ωn
Cor
recc
ióin
, dB δ = 0,3
δ = 1
δ = 0,5
δ = 0,2
δ = 0,15
δ = 0,1
10-1
100
101
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
ω/ωn
Fase
, Gra
dos
δ = 0.1
δ = 0.2
δ = 0.5
δ = 0.707
δ =1
Figura 50: correcciones a las gráficas logarítmicas.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 68 -
Las curvas de respuesta en frecuencia para el factor ( ) ( )221 nn jj ωωωωδ ++
pueden obtenerse simplemente invirtiendo el signo del logaritmo de la amplitud y el ángulo de fase del factor.
12
21
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
nn
jjωω
ωωδ
Para obtener las curvas de respuesta de frecuencia de una determinada función transferencia cuadrática, primero hay que determinar el valor de la frecuencia esquina nω y el factor de amortiguamiento δ . Luego se traza el diagrama asintótico, y usando las curvas de corrección de la gráfica 50 se obtienen las curvas exactas.
6.4.5.-Procedimiento General Para Trazar Curvas Logarítmicas De Respuesta De Frecuencia.
Para realizar las gráficas de atenuación y fase de Bode, para una función de transferencia dada, en primer lugar se deberá colocar a la citada función de transferencia como un producto de factores básicos normalizados como se vio anteriormente. Posteriormente se procede a identificar las frecuencias esquinas relacionadas con cada uno de estos factores básicos.
Finalmente, se trazan las curvas asintóticas de logaritmo de la amplitud con las pendientes adecuadas entre las frecuencias de esquina. Se puede obtener la curva exacta, que es cercana a la asíntota, agregando las correcciones adecuadas, según se vio anteriormente.
Se puede dibujar la curva de ángulo de fase para la función de transferencia dada realizando igual procedimiento que para el logaritmo del módulo, o sea, adicionando la fase correspondiente a cada factor interviniente en la función de transferencia; si se trazan primero las asíntotas posteriormente se puede dibujar la curva exacta tomando de tablas o gráficas los factores de corrección adecuados.
El uso de los diagramas logarítmicos utilizando aproximaciones asintóticas, exige mucho menos tiempo que otros métodos que pueden usarse para calcular la respuesta de frecuencia de una función de transferencia. La facilidad del trazado de las curvas de respuesta de frecuencia para una función de transferencia dada, y la facilidad de modificación de la curva de respuesta de frecuencia al agregar compensación, son las principales razones por las que se usan tan frecuentemente en la práctica los diagramas logarítmicos.
Ejemplo 4: Trazar el diagrama de Bode para la función de transferencia:
nsKsM =)(
En primer lugar se reemplaza s por ωj :

Respuesta en Frecuencia de Sistemas Lineales Control I
- 69 -
( )njKjMω
ω =)(
Para este caso lo más conveniente es realizar el siguiente procedimiento: el diagrama de atenuación será una recta con pendiente – 20.n dB/década, que cortará al eje de las frecuencias en:
nn KK
=⇒=⎟⎠⎞
⎜⎝⎛ ωω
0log20
Mientras que el diagrama de fase será una recta con un desfase de –n.90°.
10-1 100 101 102-50
-40
-30
-20
-10
0
10
20
Am
plitu
d, d
B
Frecuencia, rad/s
-20 dB/decada
10-1 100 101 102-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Fase
, Gra
dos
Frecuencia, rad/s
Figura 51: Diagrama de Bode para n=1
n K=ω

Respuesta en Frecuencia de Sistemas Lineales Control I
- 70 -
Ejemplo 5: Trazar el diagrama de Bode para nKssM =)( .
Procediendo de igual modo que el caso anterior, el diagrama de atenuación será una recta con pendiente +20.n dB/década, que cortará al eje de las frecuencias en:
( )n
n
KK 10log20 =⇒= ωω
Mientras que el diagrama de fase será una recta con un desfase de de +n.90°
10-1 100 101 102-30
-20
-10
0
10
20
30
40
Am
plitu
d, d
B
Frecuencia, rad/s
+20 dB/década
10-1 100 101 1020
90
180
Fase
, Gra
dos
Frecuencia, rad/s
Figura 52: Diagrama de Bode para n=1
n K1
=ω

Respuesta en Frecuencia de Sistemas Lineales Control I
- 71 -
Ejemplo 6: Dibujar el diagrama de Bode para ( )sssM
212)( 2 +
=
La función de transferencia en el dominio frecuencial es:
)21()(2)( 2 ωω
ωjj
jM+
=
El diagrama de atenuación para el factor 2)(2 ωj es una recta con pendiente -40 dB/década, que corta al eje de las frecuencias en 41,12 ==ω ; mientras que el factor ( ) 121 −+ ωj contribuye con una atenuación de -20 dB/década a partir de la frecuencia esquina 5,021 ==ω . El diagrama de fase para el factor 2)(2 ωj es una recta por -180°, mientras que el factor ( ) 121 −+ ωj contribuye con una fase de -90° a partir de la frecuencia esquina 5,021 ==ω .
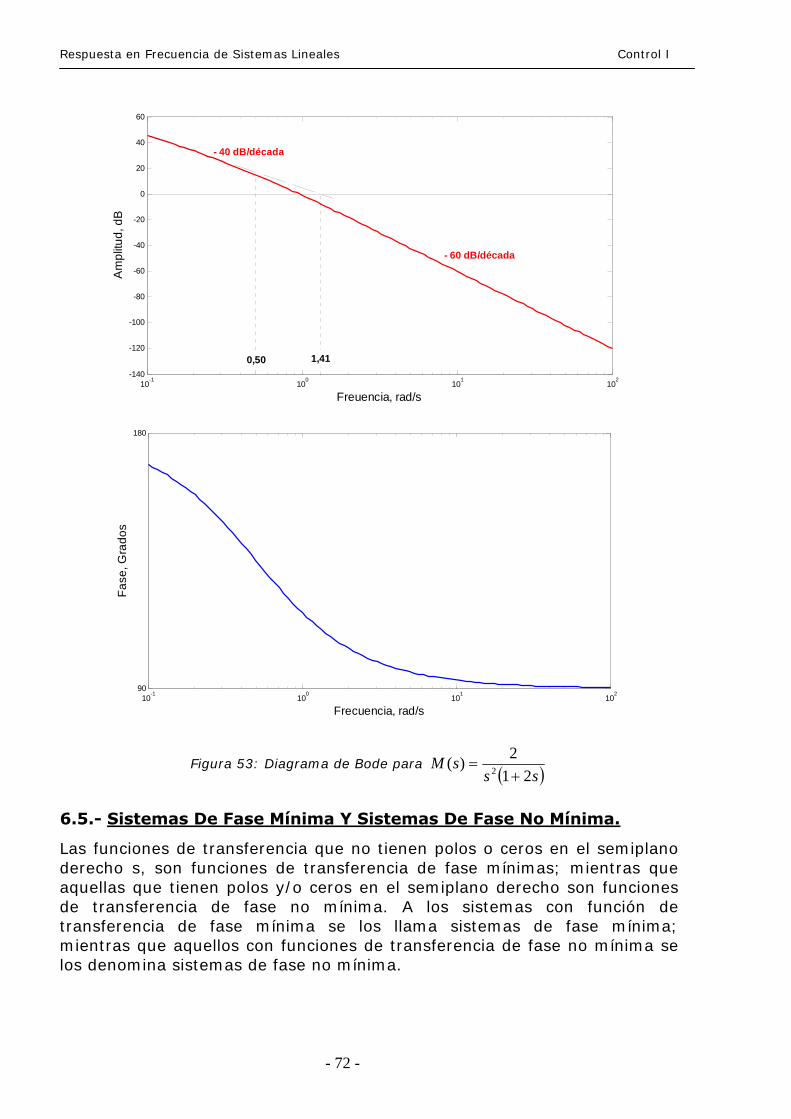
Respuesta en Frecuencia de Sistemas Lineales Control I
- 72 -
10-1 100 101 102-140
-120
-100
-80
-60
-40
-20
0
20
40
60 A
mpl
itud,
dB
Freuencia, rad/s
1,410,50
- 60 dB/década
- 40 dB/década
10-1 100 101 10290
180
Fase
, Gra
dos
Frecuencia, rad/s
Figura 53: Diagrama de Bode para ( )sssM
212)( 2 +
=
6.5.- Sistemas De Fase Mínima Y Sistemas De Fase No Mínima.
Las funciones de transferencia que no tienen polos o ceros en el semiplano derecho s, son funciones de transferencia de fase mínimas; mientras que aquellas que tienen polos y/o ceros en el semiplano derecho son funciones de transferencia de fase no mínima. A los sistemas con función de transferencia de fase mínima se los llama sistemas de fase mínima; mientras que aquellos con funciones de transferencia de fase no mínima se los denomina sistemas de fase no mínima.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 73 -
Para sistemas con la misma característica de magnitud, el rango, en ángulo de fase para la función de transferencia de fase mínima, es mínima para todos esos sistemas, mientras el rango en ángulo de fase de cualquier función transferencia de fase no mínima, es mayor que este mínimo. Estrictamente hablando, una función de fase mínima, como su nombre lo indica, es una función cuya variación de fase en sentido negativo (retardo de fase) llega a su valor mínimo cuando la frecuencia cambia de cero a infinito. Naturalmente, una función de fase no mínima, es la que no posee esta propiedad.
Sea el ejemplo de dos sistemas cuyas frecuencias de transferencia frecuencia-les, son respectivamente:
11 1
1)(TjTjjG
ωωω
++
= ; 1
2 11)(
TjTjjG
ωωω
+−
= )0( 1TT << (142)
En la figura 54 se ven las configuraciones de polos y ceros de estos sistemas. Las dos funciones de transferencia senoidales tienen las mismas características de amplitud, pero diferentes características de ángulo de fase, como puede verse en la figura 55.
Figura 54: Configuración de polos y ceros de un sistema de fase mínima )(1 sG y uno de
fase no mínima )(2 sG .
Esos dos sistemas difieren entre sí por el factor.
TjTjjG
ωωω
+−
=11)(
La amplitud del factor TjTj ωω +− 11 es siempre unitaria. Pero el ángulo de fase iguala a Ttg ω12 −− y varía desde 0 a -180 ° al incrementar ω desde cero a infinito.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 74 -
10-1 100 101-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Fase
, Gra
dos
Frecuencia, rad/s
G1(jω)
G2(jω)
Figura 55: Características de ángulo de dos sistemas )(1 sG y )(2 sG .
Para un sistema de fase mínima, las características de amplitud y ángulo de fase están relacionados directamente. Esto significa que si se especifica la curva de amplitud de un sistema en todo el rango de frecuencias desde cero a infinito, queda unívocamente determinada la curva de ángulo de fase y viceversa. Sin embargo esto no se cumple para sistemas de fase no mínima.
Puede producirse situaciones de fase no mínima por dos caminos siguientes. Uno es simplemente cuando un sistema incluye un elemento o elementos de fase no mínimas. La otra situación puede producirse en el caso que hay un lazo menor inestable.
Para un sistema de fase mínima, el ángulo de fase en ∞=ω se vuelve -90° ( pq − ); donde p y q son los grados de los polinomios numerador y denominador de la función de transferencia respectivamente. Para un sistema de fase no mínima, el ángulo de fase en ∞=ω difiere de -90° ( pq − ). En cualquiera de ambos sistemas, le pendiente de la curva del logaritmo de amplitud en ∞=ω es igual a -20 ( pq − ) dB/década. Por tanto, es posible detectar si un sistema es o no de fase mínima examinando tanto la pendiente de la asíntota de alta frecuencia de la curva de logaritmo de la magnitud, como el ángulo de fase en ∞=ω . Si la pendiente de la curva de logaritmo de la amplitud cuando ω tiende a infinito es -20 ( pq − ) dB/década y el ángulo de fase en ∞=ω es igual a -90°( pq − ), el sistema es un sistema de fase mínima.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 75 -
Los sistemas de fase no mínima son lentos en su respuesta debido a su mal comportamiento al comenzar la respuesta. En la mayor parte de los sistemas prácticos de control, hay que evitar un excesivo retardo de fase. Al diseñar un sistema, si es de primordial importancia la rápida velocidad de respuesta, no deben usarse componentes de fase no mínima (el retardo puro es uno de los ejemplos habituales de elemento de fase no mínima que puedan encontrarse presentes en sistemas de control).
Se debe hacer notar que los términos de análisis de respuesta de frecuencia y de proyecto que se analizarán en próximos capítulos, son válidos tanto para sistemas de fase mínima como de fase no mínima.
6.5.2.- Comportamiento De Los Sistemas De Fase No Mínima
Se tratan aquí únicamente sistemas de fase no mínima, en cuya función de transferencia entre únicamente un factor desfasador puro, y que son los más usuales. Estos factores son ( ) ( )asas +− 11 ( )0>a , que como ya se vio el módulo de su función de transferencia es constantemente igual a uno, pero varía en fase de 0 a π− cuando ω barre el espectro de las frecuencias positivas.
El comportamiento de estos sistemas de fase no mínima, tiene una propiedad característica: el arranque vicioso.
Cuando a un sistema cuya salida debe reproducir la entrada, se le aplica un escalón de 0 a 1, la salida pasa de cero a uno con un transitorio intermedio. En un sistema de fase mínima, la salida es positiva después de la variación
brusca de la entrada: 0)(
0
>=tdt
tdc ó si 0)(0)(
02
2
0
>∴== tt dt
tcddt
tdc
En el caso de un sistema de fase no mínima, por el contrario, la salida empieza a decrecer antes de seguir la entrada.
Esta propiedad se pone en evidencia fácilmente a partir de la forma matemática de la función de transferencia.
La respuesta a un escalón unitario de un sistema de fase mínima viene dada por:
0
0
............1)(
BsBAsA
ssC n
n
mm
++++
= (143)
Donde B y A son positivos ( B , porque el sistema se supone estable. A porque es de fase mínima); la aplicación del teorema del valor inicial demuestra, inmediatamente que la primera derivada no nula de )(tc es positiva. La figura 56 muestra la pendiente de la respuesta.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 76 -
Figura 56: Respuesta al escalón unitario de un sistema de fase mínima Por el contrario, en el caso de la frecuencia de un defasador puro, se tendrá:
( )( )Ks
KsBsBAsA
ssC n
n
mm
+−
++++
=11
............1)(
0
0 (144)
Con 0>K y teniendo siempre a la vista la hipótesis mA y nB mayor que cero; en estas condiciones se observa fácilmente mediante la aplicación del teorema del valor inicial, que la primera derivada no nula es ahora negativa; tal como se muestra en la figura 57.
Puede también observarse que, en presencia de un desfasador puro la respuesta )(tc a un escalón es de la forma:
0)(
)()( 00 >+= K
dttdc
Ktctc (145)
Figura 57: Respuesta al escalón unitario de un sistema de fase no mínima.
Donde )(0 tc es la respuesta unitaria de un sistema de fase mínima. En esta expresión )(0 tc es nulo para 0<t y crece a partir de 0=t . Inmediatamente

Respuesta en Frecuencia de Sistemas Lineales Control I
- 77 -
después de 0=t , el segundo término de )(tc es negativo e importante en valor absoluto, es decir predominante.
6.5.3.- Ejemplos De Sistemas De Fase No Mínima
1.- Regulación del nivel de líquido en una caldera donde el agua está en ebullición. Al agregar agua para elevar, el nivel, el primer resultado es detener durante algunos instantes la ebullición, es decir, hacer descender el nivel.
2.- Un avión en vuelo longitudinal es un sistema de fase no mínima, si se considera como respuesta la velocidad vertical del centro de gravedad. La razón es que cuando se actúa el timón para hacer subir el avión, el primer movimiento de este es de descenso, como consecuencia de la disminución de sustentación resultante del movimiento del timón.
Los elementos de fase no mínima se encuentran con bastante frecuencia en los sistemas de control. Es importante conocerlos por el efecto perjudicial y no compensable que ejercen sobre la precisión de los sistemas controlados.
6.6.5.- Retardo De Transporte O Retardo Puro.
El retardo de transporte es un comportamiento de fase no mínima y tiene un retardo de fase excesivo sin atenuación en altas frecuencias. Sea el retardo de transporte dado por:
TjejM ωω −=)( (146)
La amplitud es siempre igual a la unidad por:
1cos)( =−= TsenjTjM ωωω (147)
Por tanto, el logaritmo de la amplitud del retardo del transporte es igual a 0 dB.
El ángulo de fase del retardo puro es:
gradosTradianesTM ωωωωφ 3,57)()( −=−=∠= (148)
El ángulo de fase varía linealmente con la frecuencia ω . En la figura 58 se muestra la característica de ángulo de fase del retardo de transporte.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 78 -
10-1 100 101-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0Fa
se, G
rado
s
Frecuencia, rad/s
M(jω) = e jωT
|M(jω)| = 0 dB
Figura 58: Característica de ángulo de fase del retardo de transporte. Ejemplo 6: Trazar el diagrama de Bode de la siguiente función de transferencia:
sTesG
sL
+=
−
1)(
La función de transferencia frecuencial es: Tj
ejGLj
ωω
ω
+=
−
1)(
El logaritmo de la amplitud es:
TjTjejG Lj
ωωω ω
++=
++= −
11log200
11log20log20)(log20
El ángulo de fase es:
( ) 11( ) 1j LG j e L tg Tj Tωω ω ωω
− −= − = − −+
Las curvas de logaritmo de la amplitud y ángulo de fase para esta función de transferencia, con 5,0=L y 1=T aparecen en la figura 59.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 79 -
Figura 59.
6.7.1.- Relación Entre El Tipo De Sistema Y La Curva Del Logaritmo De La Amplitud.
Los coeficientes de error de posición estática, velocidad y aceleración describen el comportamiento en baja frecuencia de los sistemas tipo 0, tipo 1 y tipo 2, respectivamente. Para un sistema dado, solo uno de los coeficientes de error estático es finito y significativo (cuánto más grande es el coeficiente de error estático finito, mayor es la ganancia del lazo cuando ω tiende a 0).

Respuesta en Frecuencia de Sistemas Lineales Control I
- 80 -
El tipo de sistema determina la pendiente de la curva de logaritmo de amplitud a bajas frecuencias. Por tanto, se puede determinar la información referente a la existencia y valor del error estacionario de un sistema de control ante determinada entrada por la observación de la zona de baja frecuencia de la curva el logaritmo de la amplitud. Es importante aclarar que para las determinaciones de coeficientes que se hacen a continuación, se graficará el módulo en decídeles de la función de transferencia de lazo abierto de un sistema realimentado negativamente.
6.7.2.- Determinación De Los Coeficientes De Error De Posición Estático.
En la figura 60 presenta un ejemplo del diagrama del logaritmo de la ampli-tud de un sistema tipo cero. En tal sistema, el valor de la función de transferencia de lazo abierto )()( ωω jHjG iguala a Kp en bajas frecuencias, o sea:
0lim ( ) ( )G j H j Kpω
ω ω→
=
Figura 60: Curva de logaritmo de la amplitud de un sistema tipo 0.
De aquí se llega a que la asíntota de baja frecuencia es una recta horizontal en Kplog20 dB.
6.7.3.- Determinación De Los Coeficientes De Error Estático De Velocidad.
La figura 61, presenta un ejemplo de diagrama de logaritmo de la amplitud de un sistema tipo 1. La intersección del segmento inicial -20 dB/década (o su continuación) con la recta 1=ω , tiene la magnitud Kvlog20 . Puede verse esto como sigue en un sistema tipo 1:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 81 -
1)()( <<= ωω
ωω parajKvjHjG (149)
Entonces:
KvjKv log20log20
1
==ωω
(150)
Figura 61: Curva de logaritmo de la amplitud de un sistema tipo 1.
La intersección del segmento inicial -20 dB/década (o su continuación) con la recta 0 dB tiene una frecuencia numérica igual a Kv . Para ver esto, se define la frecuencia como 1ω , entonces:
11
1 ωω
=⇒= KvjKv (151)
Por ejemplo, sea un sistema tipo 1 con realimentación unitaria cuya función de transferencia de lazo abierto es:
)()(
FJssKsG+
= (152)
Si se define la frecuencia de esquina como 2ω y a la frecuencia de intersección del segmento de -40 dB/década (o su prolongación) con la recta 0 dB como 3ω :

Respuesta en Frecuencia de Sistemas Lineales Control I
- 82 -
JF
=2ω ; JK
=23ω (153)
Como:
FKKv ==1ω (154)
Resulta 2
3
3
12321 ω
ωωω
ωωω =⇒= (155)
En el diagrama logarítmico:
2331 loglogloglog ωωωω −=− (156) Así, el punto 3ω está justamente en el medio de los puntos 1ω y 2ω . La relación de amortiguamiento δ de este sistema es:
3
2
22 ωω
δ ==JK
F (157)
6.7.3.- Determinación De Los Coeficientes De Error Estático De Aceleración.
La figura 62, muestra un ejemplo de diagrama de logaritmo de la amplitud de un sistema tipo 2. La intersección del segmento inicial -40 dB/década (o su continuación) con la recta 1=ω , tiene la magnitud Kalog20 .
Figura 62: Curva de logaritmo de la amplitud de un sistema tipo 2.
Respuesta en Frecuencia de Sistemas Lineales Control I
- 83 -
Como a bajas frecuencias:
( )2)()(ω
ωωjKajHjG =
Entonces:
( )Ka
jKa log20log20
12 =
=ωω
La frecuencia aω en la intersección del segmento inicial -40 dB/década (o su prolongación) con la recta de 0 dB, da, numéricamente, la raíz cuadrada de Ka :
( )01log20log20 2 ==
ωjKa (158)
Queda:
Kaa =ω (159)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 84 -
7.- Análisis Experimental De La Respuesta Frecuencial.
7.1.- Determinación Experimental De Funciones De Transferencia.
El primer paso en el análisis y proyecto de control es desarrollar, un modelo matemático de la planta en estudio. Obtener un modelo analíticamente puede ser bastante difícil. Puede ser necesario obtenerlo por medio de un análisis experimental. La importancia de los métodos de respuesta de frecuencia es que la función de transferencia del sistema, o de cualquier componente de un sistema puede ser determinado por simples mediciones de respuesta de frecuencia.
Si se han medido la relación de amplitud y desplazamiento de fase en un número suficiente de frecuencias dentro del rango de frecuencias de interés, se las puede representar en el diagrama de Bode. Luego se puede determinar la función de transferencia por aproximaciones asintóticas. Se construyen curvas asintóticas del logaritmo del módulo constituido por varios segmentos. Con algunos tanteos y correcciones en frecuencias esquinas, generalmente es posible hallar una aproximación bastante cercana a la curva. (Nótese que si se representa la frecuencia en ciclos por segundo en lugar de radianes por segundo, hay que convertirlas frecuencias esquinas a radianes por segundo antes de calcular las constantes de tiempo).
Otras veces se realiza la determinación de la función de transferencia frecuencial en forma experimental, cuando se desea confirmar un análisis matemático de un sistema, o sea, chequear si la función de transferencia obtenida analíticamente es válida. 7.2.- Generadores De Señal Senoidal
Para realizar la prueba de respuesta de frecuencias se debe disponer de generadores de señal senoidal adecuadas. La señal puede tener que estar en forma mecánica, eléctrica o neumática.
Los rangos de frecuencias necesarios para la verificación están aproximadamente entre 0,001 - 10 cps para sistemas de constante de tiempo elevada; hasta 0,1 - 1000 cps para sistemas con constantes de tiempo pequeñas. La señal senoidal debe estar razonablemente libre de armónicas o distorsión.
Para rangos de muy baja frecuencia (Por debajo de 0.01 cps), puede utilizarse un generador de señal mecánico (junto con un transductor neumático o eléctrico si es necesario). Para el rango de frecuencias desde 0.01 - 1000 cps, puede usarse un generador eléctrico de señal adecuado (junto con un transductor si es necesario).
La posibilidad de obtener generadores de señal senoidal con esas características es usualmente fácil, por ejemplo:
a - Un simple mecanismo de biela-manivela produce variaciones senoidales de desplazamiento lineal.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 85 -
b - Un desplazamiento senoidal en el extremo de un resorte lineal produce variaciones senoidales de la fuerza ejercida por el otro extremo del resorte en su reporte.
c - Corrientes eléctricas alternas senoidales son debidas a variaciones senoi dales de tensión.
d - Un pistón correspondiente a un cilindro de aire cerrado puede producir variaciones senoidales de presión en el cilindro.
e - Generadores senoidales electrónicos son de uso común en los laboratorios de análisis.
7.3.- Procedimiento Para Obtener La Función De Transferencia De Un Sistema Lineal En Forma Experimental
El procedimiento conveniente a seguir para el análisis es el siguiente:
1- Aplicar una entrada senoidal tsenHtr ω=)( a una variable apropiada del sistema considerado como entrada. El valor inicial de la variable de entra da puede ser cualquier valor de estado constante. La excitación senoidal de entrada es superpuesta sobre el valor inicial de estado constante.
2- Para un valor seleccionado de frecuencia ω y una amplitud constante H , dejar que los efectos transitorios en la respuesta del sistema se extingan. La variable elegida para representar la respuesta del sistema tendrá luego una variación senoidal con una amplitud constante y la misma frecuencia que la entrada. Se mide la amplitud de la variable de respuesta y su fase relativa a la entrada senoidal.
Frecuentemente ambas variables, de entrada y salida, pueden ser visualizadas en un osciloscopio o graficadas en un registrador.
3- Manteniendo la amplitud constante H de entrada, repetir el procedimiento para distintos valores de frecuencia, recorriendo la banda de frecuencias para el cual el sistema responde.
4- Graficar los resultados obtenidos en las coordenadas de Bode, a partir de la cual según se verá, se podrá determinar la función de transferencia buscada.
7.4.- Determinación De Funciones Transferencia De Fase Mínima A Partir De Diagramas De Bode
Como se indicó previamente, puede determinarse si un sistema es de fase mínima o no partiendo de las curvas de respuesta de frecuencia examinando las características de alta frecuencia.
Para determinar la función de transferencia se comienzan por trazar asíntotas a la curva de logaritmo de la amplitud obtenida experimentalmente. Las asíntotas deben tener pendientes de múltiplos de
décadadB /20± . Si la pendiente de la curva del logaritmo obtenida

Respuesta en Frecuencia de Sistemas Lineales Control I
- 86 -
experimentalmente varía desde 20− a décadadB /40− en 1ωω = , es claro que
existe un factor 1
11
−
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞⎜
⎝⎛+ ωωj en la función de transferencia.
Si la pendiente varía en décadadB /40− en 2ωω = , debe haber un factor
cuadrático de la forma
12
22
21
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
ωω
ωωδ jj en la función de
transferencia.
La frecuencia natural no amortiguada de este factor cuadrático es igual a la frecuencia esquina 2ω . Se puede determinar la relación de amortiguamiento δ de la curva del logaritmo de la amplitud obtenida experimentalmente midiendo el valor del pico resonante cerca de la frecuencia esquina 2ω y comparando este con las curvas que aparecen en la figura 50
Una vez determinado los factores de la función de transferencia )( ωjM se puede determinar la ganancia de la porción de baja frecuencia de la curva logaritmo amplitud.
Como los términos tales como ( )11 ωωj+ y ( ) ( )22221 ωωωωδ jj ++ tienden a
la unidad cuando ω tiende a cero, a frecuencias muy bajas se puede es-cribir la función de transferencia senoidal )( ωjM :
( )λω ωω
jKjM =
→)(lim
0 (160)
En muchos sistemas prácticos, λ es igual a 0, 1 ó 2.
1- Para 0=λ , o sistema tipo 0:
KjM =)( ω ; para 1<<ω (161)
La asíntota de baja frecuencia es una recta horizontal en dBKlog20 . Así se puede hallar el valor de K de su asíntota horizontal.
2- Para 1=λ , o sistemas de tipo 1:
ωω
jKjM =)( ; para 1<<ω (162)

Respuesta en Frecuencia de Sistemas Lineales Control I
- 87 -
Que indica que la asíntota de baja frecuencia tiene la pendiente décadadB /20− . La frecuencia a la cual la asíntota de baja frecuencia (o su
prolongación) intersecta la recta 0 dB es numéricamente igual a K.
3- Para 2=λ , o sistemas de tipo 2:
( )2)(ω
ωjKjM = ; para 1<<ω (163)
ωω log40log20)(log20 −= KjM ; para 1<<ω (164)
La pendiente de la asíntota de baja frecuencia es décadadB /40− . La frecuen-cia a la cual esta asíntota (o su prolongación) intersecta la linea de 0 dB es numéricamente igual a K .
En la figura 63 se ven ejemplos de curvas de logaritmo amplitud para sistemas de tipo cero, tipo 1 y tipo 2, conjuntamente con la frecuencia con la cual se relaciona la ganancia K.
La curva de ángulo de fase obtenida experimentalmente brinda un medio de verificar la función de transferencia obtenida de la curva de logaritmo de la amplitud. Para un sistema de fase mínima, la curva de ángulo de fase experimental de be coincidir con razonable exactitud con la curva de ángulo de fase teórica obtenida a partir de la función de transferencia recién determinada. Estas dos curvas de ángulo de fase, deben coincidir exactamente tanto en el rango de muy baja frecuencia como en el de frecuencias muy elevadas. Si el ángulo de fase obtenido experimentalmente a frecuencias muy altas (comparadas con la frecuencia esquina) no es igual a -90° ( pq − ), donde p y q son los grados de los polinomios numerador y denominador de la función de transferencia respectivamente, la función de transferencia debe ser una función de transferencia de fase no mínima.
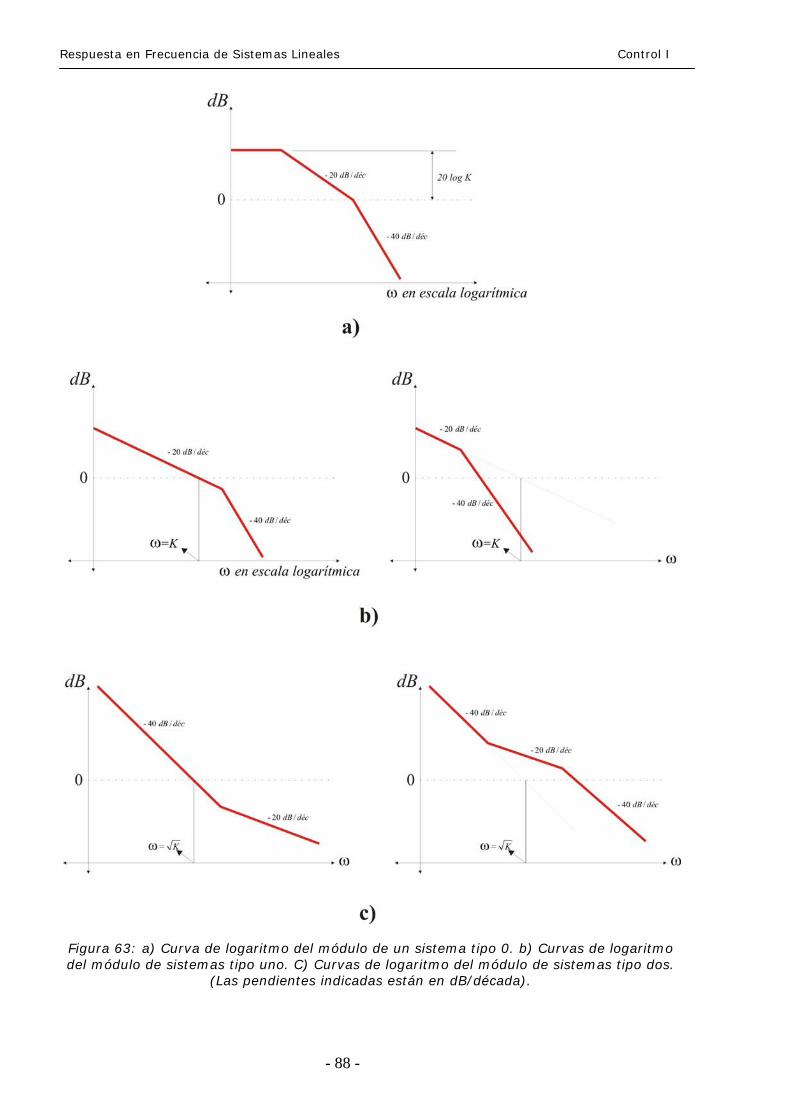
Respuesta en Frecuencia de Sistemas Lineales Control I
- 88 -
Figura 63: a) Curva de logaritmo del módulo de un sistema tipo 0. b) Curvas de logaritmo del módulo de sistemas tipo uno. C) Curvas de logaritmo del módulo de sistemas tipo dos.
(Las pendientes indicadas están en dB/década).

Respuesta en Frecuencia de Sistemas Lineales Control I
- 89 -
7.5.- Funciones De Transferencia De Fase No Mínima
Si en el extremo de altas frecuencias, el ángulo de fase calculado es 180° menor que el retardo de fase obtenido experimentalmente, uno de los ceros de la función de transferencia debe haber estado en el semiplano derecho s en lugar del semiplano izquierdo s. Si el retardo de fase calculado difiere del ángulo de fase obtenida experimentalmente por una velocidad constante de modificación de fase, hay retardo de transporte o tiempo muerto. Si se supone que la función de transferencia es de la forma:
stesG −=)(
Donde )(sG es una relación de dos polinomios en s.
TejGdd Tj −=∠ −
∞→
ω
ωω
ω)(lim (165)
Así, de esta última ecuación, se puede calcular el valor del retardo de transporte T.
7.6- Apreciaciones Útiles Sobre La Determinación Experimental De La Función De Transferencia
1. Generalmente es más fácil efectuar medidas exactas de amplitud que medidas exactas de desplazamiento de fase. Las mediciones de desplazamiento de fase pueden introducir errores causados por instrumentación o por interpretación de los registros experimentales.
2. La respuesta de frecuencia del equipo de medición utilizado para la determinación de la salida del sistema, debe tener curvas de amplitud en función de la frecuencia prácticamente planas. Además el ángulo de fase debe ser casi proporcional a la frecuencia.
3. Los sistemas físicos tienen algún tipo de alinealidades. Por tanto, es necesario considerar cuidadosamente la amplitud de las señales senoidales de entrada. Si la amplitud de la señal de entrada es excesivamente grande, el sistema tiende a saturarse y la prueba de respuesta de frecuencia da resultados inexactos. Por otro lado, una señal pequeña puede producir errores debido a zona muerta. Por tanto, hay que realizar una cuidadosa elección de la amplitud de la señal senoidal de entrada. Es necesario muestrear la forma de onda de la salida del sistema para asegurarse que su forma es senoidal y que el sistema está funcionando durante el periodo de prueba en la región lineal (la forma de onda a la salida del sistema no es senoidal si éste está funcionando en una región no lineal).
4. Si el sistema en estudio está funcionando continuamente por días y semanas, no hace falta detener su funcionamiento normal para las

Respuesta en Frecuencia de Sistemas Lineales Control I
- 90 -
pruebas de respuesta de frecuencia. Se puede superponer la señal de prueba senoidal a las entradas normales. Entonces, para sistemas lineales, se superpondrá a la salida normal, la respuesta correspondiente a la señal de prueba. Para la determinación de la función de transferencia con el sistema en funciona miento normal, también se usan frecuentemente señales estocásticas (señales de ruido blanco). Utilizando funciones correlación, se puede determinar la función de transferencia del sistema sin interrumpir su funcionamiento normal.
Ejemplo 7: Un sistema controlado, consiste de un posicionador hidráulico de aceite que empuja una carga la cual puede ser asimilada como una unidad masa resorte amortiguador. La posición de la masa es controlada por la posición de la palanca de entrada del posicionador. Es deseable establecer experimentalmente la relación dinámica entre el metimiento de entrada de la palanca ix y la posición de la masa x . Para realizar esto, es necesario un generador de movimiento senoidal, para aplicar a la palanca de entrada la oscilación senoidal de amplitud constante y frecuencia variable. Dicha señal de entrada será tsenω05.0 donde 0.05 es la amplitud a mantener constante y ω la frecuencia a variar. Para registrar el movimiento de la masa, se ajusta a ella un transductor de desplazamiento. La respuesta senoidal de la masa )( φω += tsenBx es medida para el rango de frecuencia que se varió la entrada. El resultado de mediciones efectuadas de B y φ se muestra en la tabla 4.
Frecuencia de entrada
ω [rad/seg]
0 0,1 0,2 0,4 0,6 0,8 1 2 4 10 20 40 80 100
Amplitud de la
respuesta B [pulg]
5 5 4,72 4,25 3,35 2,8 2,5 1,12 0,35 0,08 0,02 0,03 - -
Fase de la respuesta φ [º]
0 12,5 25 46 60 72 80 109 139 182 213 237 255 260
Tabla 4.
Con estos datos se requiere obtener la función de transferencia del sistema )()( sXsX i
Solución: El método de graficar en Bode es el más fácil de interpretar. Se divide la amplitud de salida sobre la amplitud de entrada para todas las frecuencias y se lo expresa luego en dB.
La gráfica resultante es la mostrada a continuación.

Respuesta en Frecuencia de Sistemas Lineales Control I
- 91 -
10-1 100 101 102-60
-40
-20
0
20
40
60A
mpl
itud,
dB
Frecuencia, rad/s
0 dB/déc.
-20 dB/déc.
-40 dB/déc.
-60 dB/déc.
10-1 100 101 102-270
-180
-90
0
90
Fase
, Gra
dos
Frecuencia, rad/s Figura 64.
De estas gráficas se puede deducir:
a. )(ωfdBG = es asintótica a la línea horizontal de dBdBG 40= , cuando la frecuencia ω tiende a cero. Esto implica que en la función de transferencia buscada no hay ceros ni polos en el origen.
b. La pendiente ele la curva )(ωfdBG = se incrementa continuamente en el sentido horario. 0 sea que no hay puntos de inflexión (no hay ceros).
c. La curva )(ωfdBG = es asintótica a una línea de pendiente -60 dB/déc cuando la frecuencia tiende a infinito; por lo tanto el

Respuesta en Frecuencia de Sistemas Lineales Control I
- 92 -
sistema es de tercer orden.
d. La curva )(ωφ f= es asintótica a º0=φ para bajas frecuencias (lo qua implica que K es positivo) y pareciera ser a -270° para altas frecuencias.
Por lo expuesto en b se observa que no hay ceros en la función de transferencia. La ausencia de puntos máximos y mínimos en la curva
)(ωφ f= apoya esta conclusión.
En conjunción con b, la c indica la presencia en el denominador de un polinomio de tercer orden.
Por lo tanto se puede concluir que la función de transferencia es de la forma:
1)()(
32
23
1 +++=
sTsTsTK
sXsX
i
La falta de puntos de resonancia elimina el caso d. Un posterior entendimiento del sistema físico bajo prueba indica la probabilidad del caso c como el mejor modelo. Sobre esta base habrá cuatro aproximaciones asintóticas de la curva, según se muestra en la figura 65, de la cual se pueden determinar las tres frecuencias esquinas:
05.0201
25.041
25.0
1
3
2
1
==
==
==
T
T
T
Además: 10040log20][ =⇒== xxdBK Lo cual era ya evidente pues los cocientes de las amplitudes de salida y entrada para 0=ω es 10005.05 = .
Finalmente la función de transferencia obtenida experimentalmente será:
( )( )( )ssssXsX
i 05.0125.0121100
)()(
+++=

Respuesta en Frecuencia de Sistemas Lineales Control I
- 93 -
La evaluación más precisa de las frecuencias esquinas, puede ser evaluada mejor conociendo los parámetros del sistema, dado que las constantes de tiempo del sistema son función de ellos.
Ejemplo 8: La respuesta frecuencial experimental de un sistema es mostrada en la tabla 5.
Frecuencia de entrada
ω [rad/seg]
0,1 0,2 0,4 0,6 0,8 1 2 3 5 7 10 20 40
Amplitud de la
respuesta B [pulg]
1 0.95 0.75 0.6 0.47 0.4 0.25 0.225 0.2 0.19 0.16 0.12 0.05
Fase de la respuesta φ [º]
11 22 37 42 46 47 45 43 44 48 55 68 78
Tabla 5.
La amplitud de la entrada ( H ) es constante e igual a 1. Establecer la función de transferencia del sistema.
Con los valores de la tabla se dibuja el gráfico de Bode de atenuación )(ωfHB = y de fase )(ωφ f= .

Respuesta en Frecuencia de Sistemas Lineales Control I
- 94 -
10-1 100 101 102-35
-30
-25
-20
-15
-10
-5
0
5A
mpl
itud,
dB
Frecuencia, rad/s
0 dB/déc
0 dB/déc
-20 dB/déc
-20 dB/déc
T1 = 2.5 T2 = 0.5 T3 = 0.1
10-1 100 101 102-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
Fase
, Gra
dos
Frecuencia, rad/s
Puntos de Inflexión
Figura 65.
La curva de atenuación tiene una pendiente original de cero dB/década seguida por una de -20 dB/década, y luego por una reducción de la pendiente a 0 dB/década volviendo por último a -20 dB/riécada.
Inmediatamente se deduce que la primer pendiente después de la inicial de 0 dB/década se deberá a un factor ( )sT111 + , la que sigue se deberá a un factor ( )sT21+ y la última a un factor ( )sT311 + . Por lo tanto la función de transferencia-será de la forma:

Respuesta en Frecuencia de Sistemas Lineales Control I
- 95 -
( )( )( )sTsT
sTKsRsC
31
2
111
)()(
+++
=
Como se ve en la gráfica la curva )(ωφ f= es asintótica a 0o para frecuencias bajas y a -90° para frecuencias tendiendo a infinito. Trazando en el dia-grama de atenuación las asíntotas del mejor modo posible se pueden determinar:
1.05.05.2
3
2
1
===
TTT
Además 1=K , ya que 0log20 =K
Por consiguiente:
( )( )( )ss
ssRsC
1.015.215.011
)()(
+++
=
Los puntos de inflexión en la curva de )(ωφ f= ocurren en la región de cada frecuencia esquina, lo cual ayuda a confirmar las frecuencias esquinas determinadas.