sistemas lineales acoplados
TRANSCRIPT
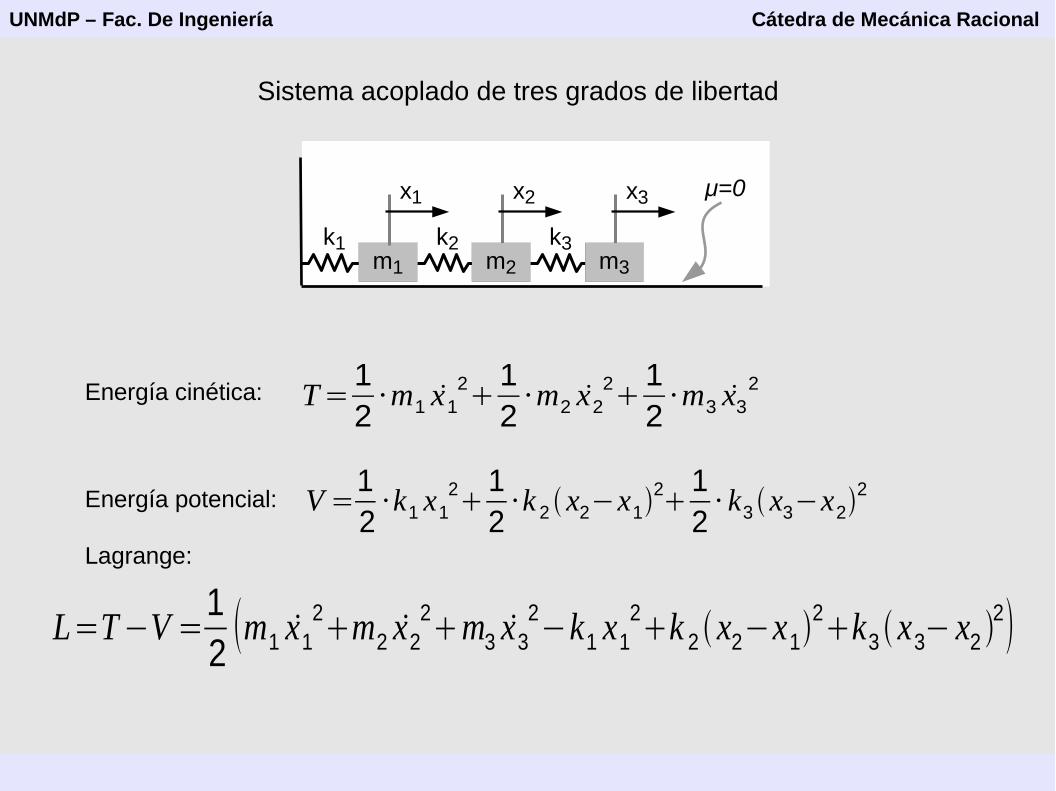
Sistema acoplado de tres grados de libertad
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
Energía cinética:
Energía potencial:
Lagrange:
T=12
·m1 x12
12
·m2 x22
12
·m3 x32
V =12
· k1 x12
12
· k 2 x2−x12
12
· k3 x3−x22
L=T−V =12
m1 x12m2 x2
2m3 x3
2−k1 x1
2k 2 x2−x1
2k3 x3− x2
2
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
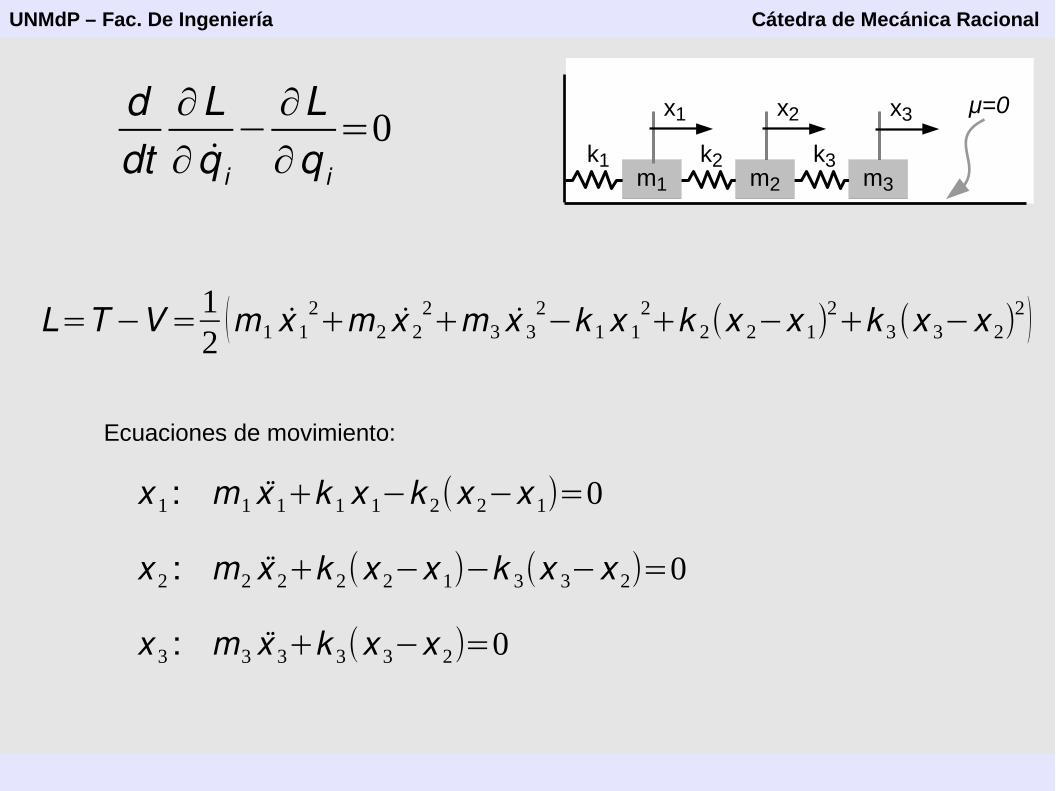
ddt
∂L∂ q i
−∂L∂q i
=0
L=T−V=12
(m1 x 12+m2 x 2
2+m3 x 3
2−k 1x 1
2+k 2(x 2−x 1)
2+k 3(x 3−x 2)
2 )
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
x 1 :
x 2 :
x 3 :
m1 x 1+k 1 x 1−k 2(x 2−x 1)=0
m2 x 2+k 2(x 2−x 1)−k 3(x 3−x 2)=0
m3 x 3+k 3(x 3−x 2)=0
Ecuaciones de movimiento:
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
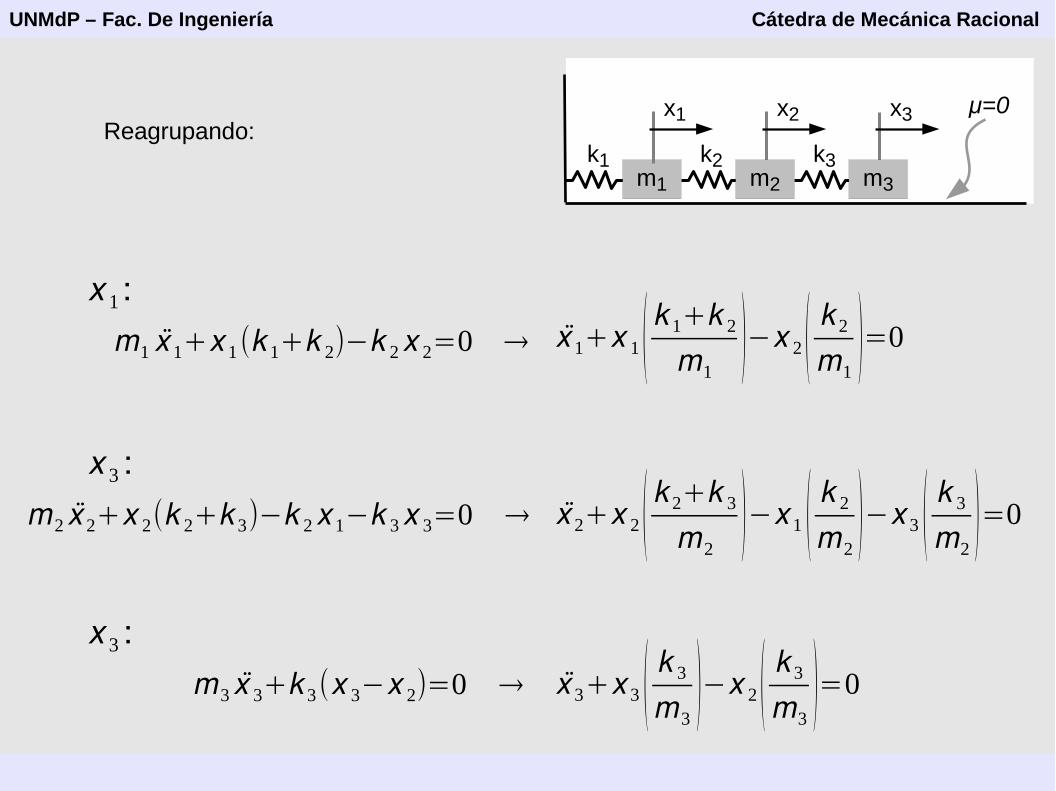
Reagrupando:
x 1 :
x 3 :
x 3 :
m1 x 1+x 1(k 1+k 2)−k 2x 2=0 →
m2 x 2+x 2(k 2+k 3)−k 2x 1−k 3x 3=0 →
m3 x 3+k 3(x 3−x 2)=0 →
x 1+x 1 ( k 1+k 2
m1)−x 2 ( k 2
m1)=0
x 2+x 2 ( k 2+k 3
m2)−x 1 ( k 2
m2)−x 3 ( k 3
m2)=0
x 3+x 3 ( k 3
m3)−x 2 ( k 3
m3)=0
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
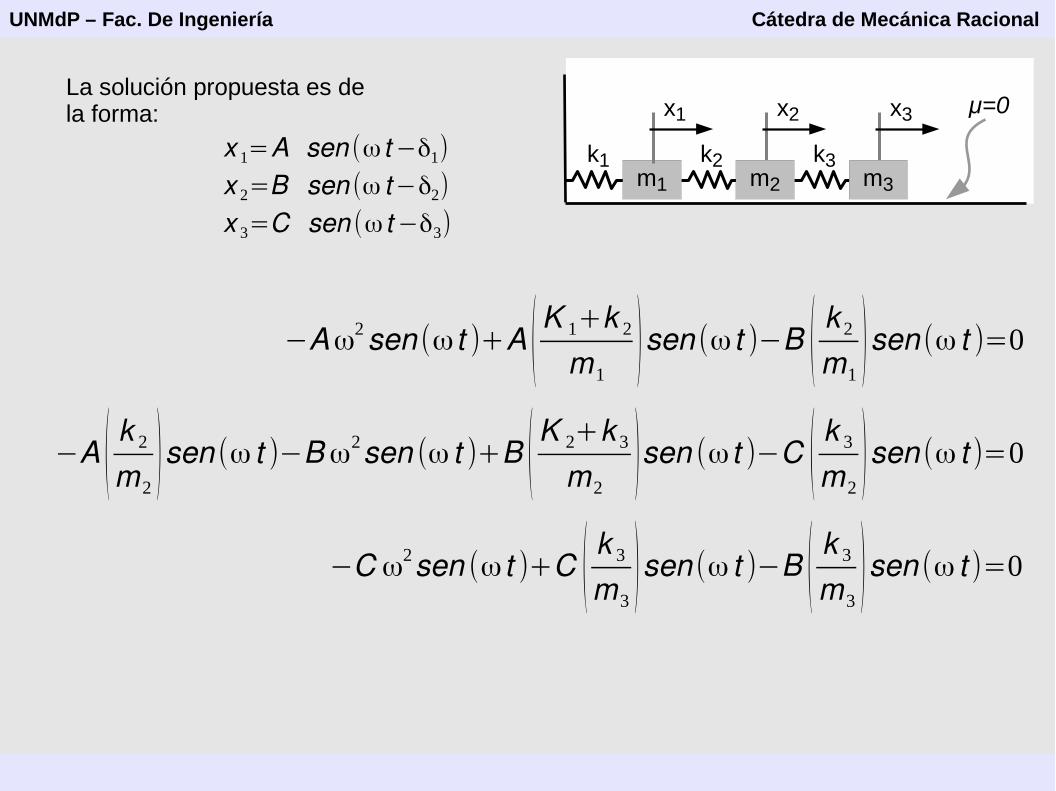
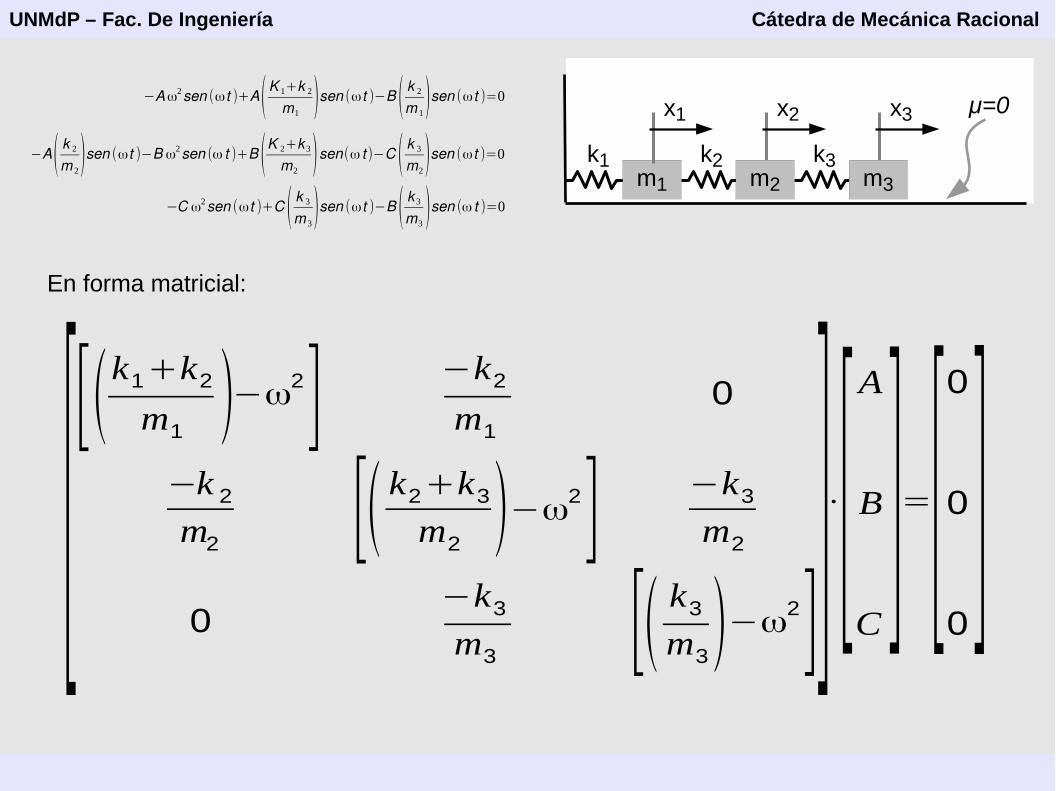
La solución propuesta es de la forma:
x 1=A sen (ω t−δ1)
x 2=B sen (ω t−δ2)
x 3=C sen (ω t−δ3)
−Aω2sen (ω t )+A (K 1+k 2
m1)sen (ω t )−B ( k 2
m1)sen (ω t )=0
−A ( k 2
m2)sen (ω t )−Bω2sen (ω t )+B (K 2+k 3
m2)sen (ω t )−C ( k 3
m2)sen (ω t )=0
−C ω2sen (ω t )+C ( k 3
m3)sen (ω t )−B ( k 3
m3)sen (ω t )=0
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
−Aω2sen (ωt )+A(K 1+k 2
m1)sen (ωt )−B ( k 2
m 1)sen (ωt )=0
−A( k 2
m 2)sen (ωt )−B ω2sen (ω t )+B (K 2+k 3
m2)sen(ω t )−C ( k 3
m2)sen (ωt )=0
−C ω2sen (ωt )+C ( k 3
m 3)sen (ωt )−B ( k 3
m3)sen (ω t )=0
En forma matricial:
[[(k1+k2
m1)−ω
2] −k2
m1
0
−k 2
m2 [( k2+k3
m2)−ω
2] −k3
m2
0−k3
m3 [( k3
m3)−ω
2]]⋅[A
B
C]=[
0
0
0]
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
det∣[(k1+k2
m1)−ω2] −k2
m1
0
−k2
m2 [(k2+k3
m2)−ω2] −k3
m2
0−k3
m3 [( k3
m3)−ω2]∣=0
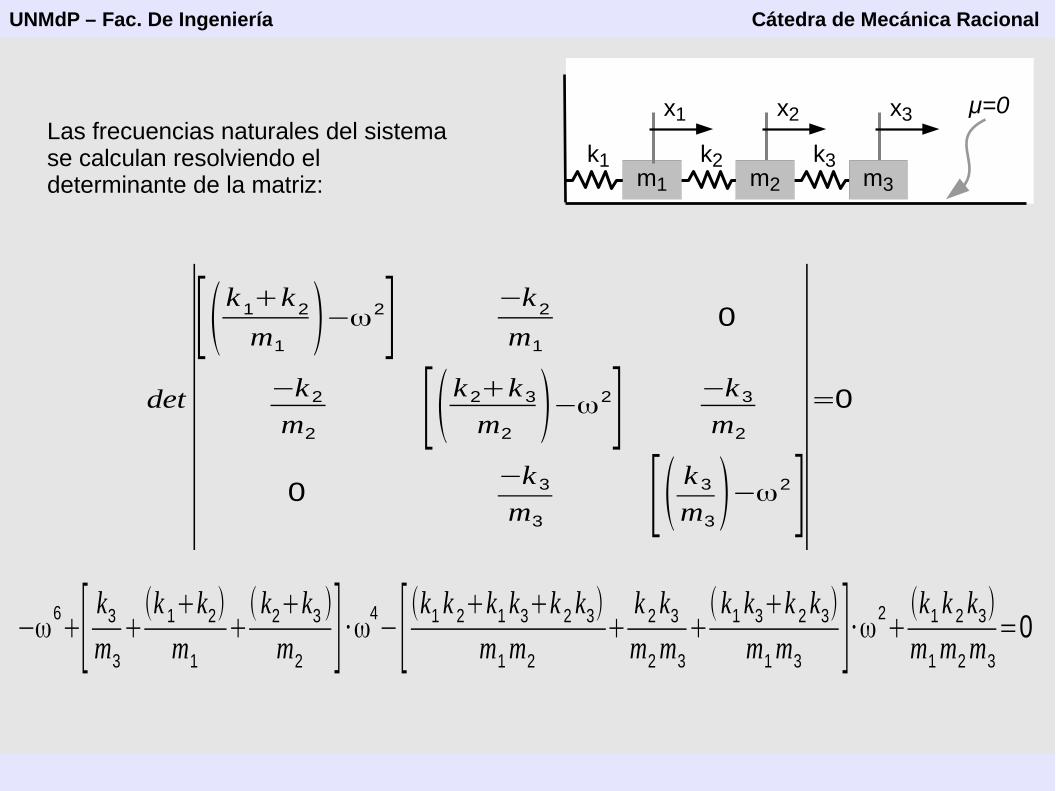
Las frecuencias naturales del sistema se calculan resolviendo el determinante de la matriz:
−ω6+[ k3
m3
+(k 1+k2)
m1
+( k2+k3 )
m2] ·ω4
−[ (k1 k 2+k1 k3+k 2 k3)
m1 m2
+k 2 k3
m2 m3
+( k1 k3+k 2 k3)
m1 m3]·ω2
+(k1 k 2 k3)
m1 m2 m3
=0
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
μ=0x2 x3
m2 m3m1
x1
k1 k2 k3
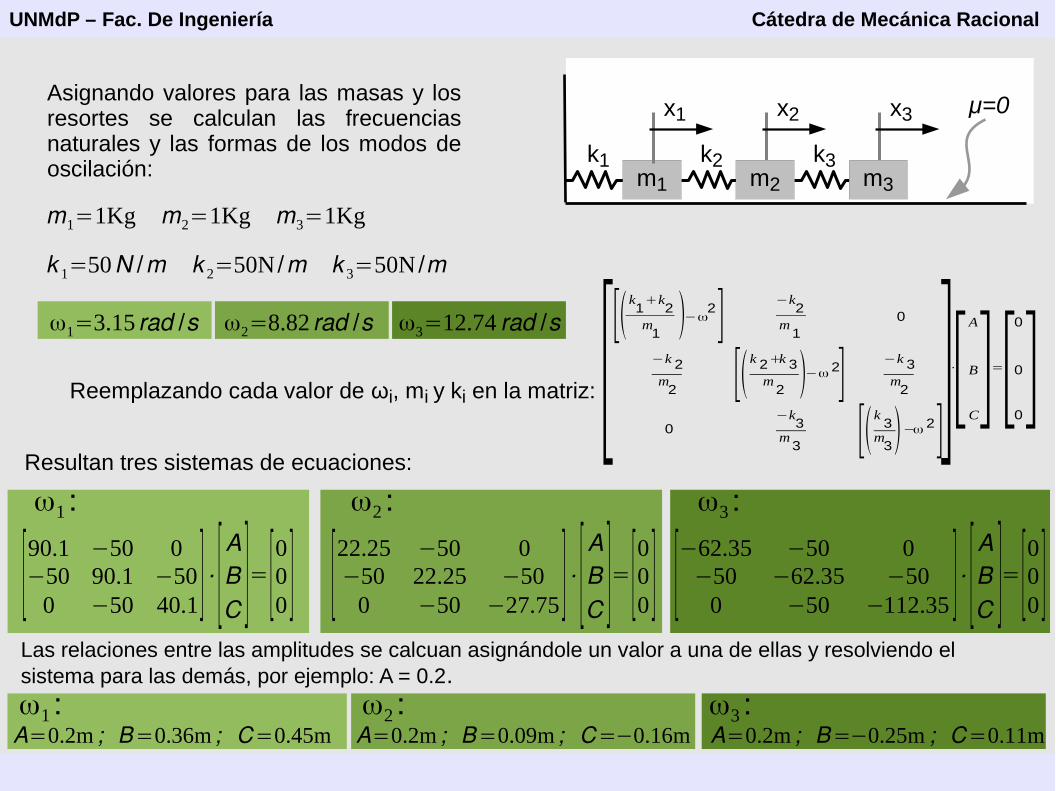
Asignando valores para las masas y los resortes se calculan las frecuencias naturales y las formas de los modos de oscilación:
[[(
k1+k
2m
1)−ω
2]−k
2m
10
−k 2m
2 [(k 2+k 3
m2 )−ω 2]
−k 3m
2
0−k
3m
3 [(k
3m
3)−ω 2]]⋅[A
B
C]=[
0
0
0]
m1=1Kg m2=1Kg m3=1Kg
k 1=50N /m k 2=50N /m k 3=50N /m
ω1=3.15 rad /s ω2=8.82 rad /s ω3=12.74 rad /s
Reemplazando cada valor de ωi, mi y ki en la matriz:
Resultan tres sistemas de ecuaciones:
[90.1 −50 0−50 90.1 −50
0 −50 40.1] · [ABC ]=[
000 ] [
22.25 −50 0−50 22.25 −50
0 −50 −27.75 ] · [ABC ]=[
000 ] [
−62.35 −50 0−50 −62.35 −50
0 −50 −112.35 ]· [ABC ]=[
000 ]
ω1 : ω2 : ω3 :
Las relaciones entre las amplitudes se calcuan asignándole un valor a una de ellas y resolviendo el sistema para las demás, por ejemplo: A = 0.2.
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
ω1 : ω2 : ω3 :A=0.2m ; B=0.36m ; C=0.45m A=0.2m ; B=0.09m ; C=−0.16m A=0.2m ; B=−0.25m ; C=0.11m
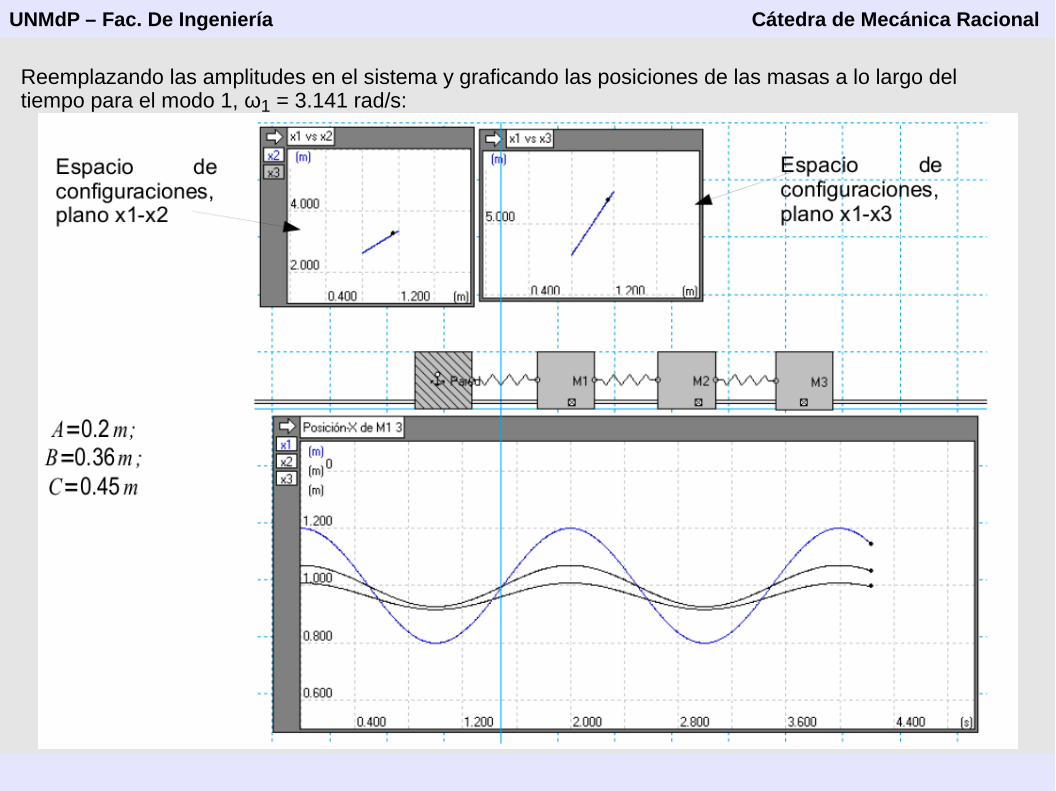
Reemplazando las amplitudes en el sistema y graficando las posiciones de las masas a lo largo del tiempo para el modo 1, ω1 = 3.141 rad/s:
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
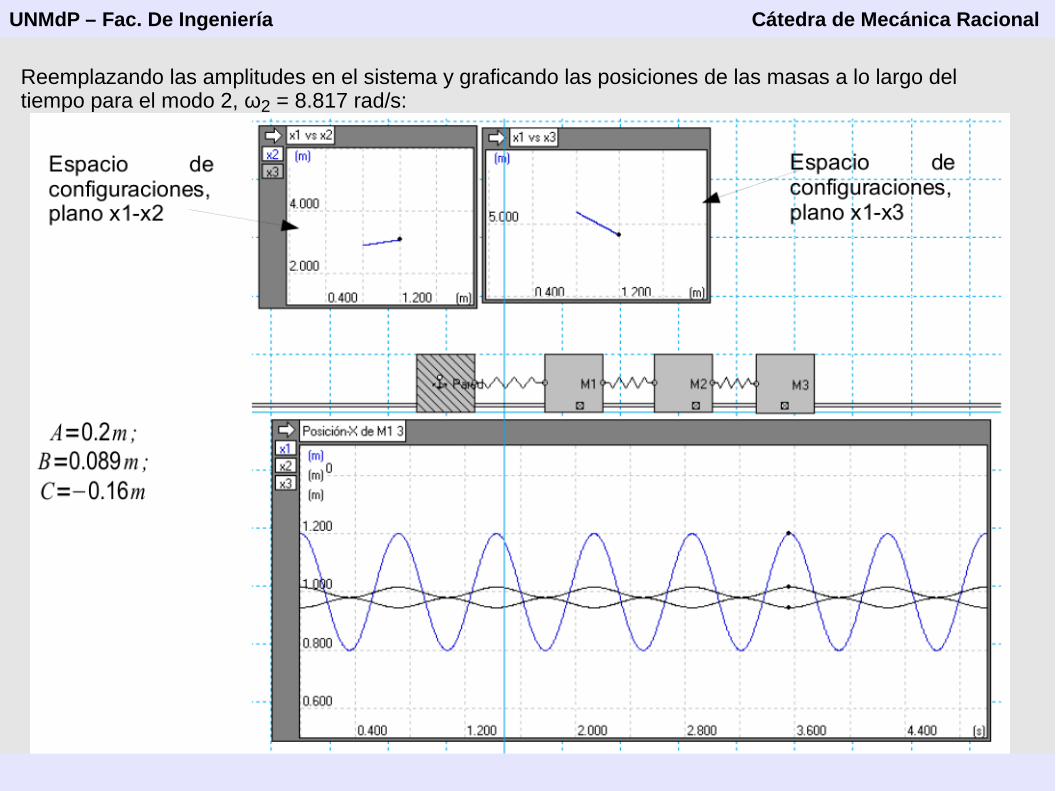
Reemplazando las amplitudes en el sistema y graficando las posiciones de las masas a lo largo del tiempo para el modo 2, ω2 = 8.817 rad/s:
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
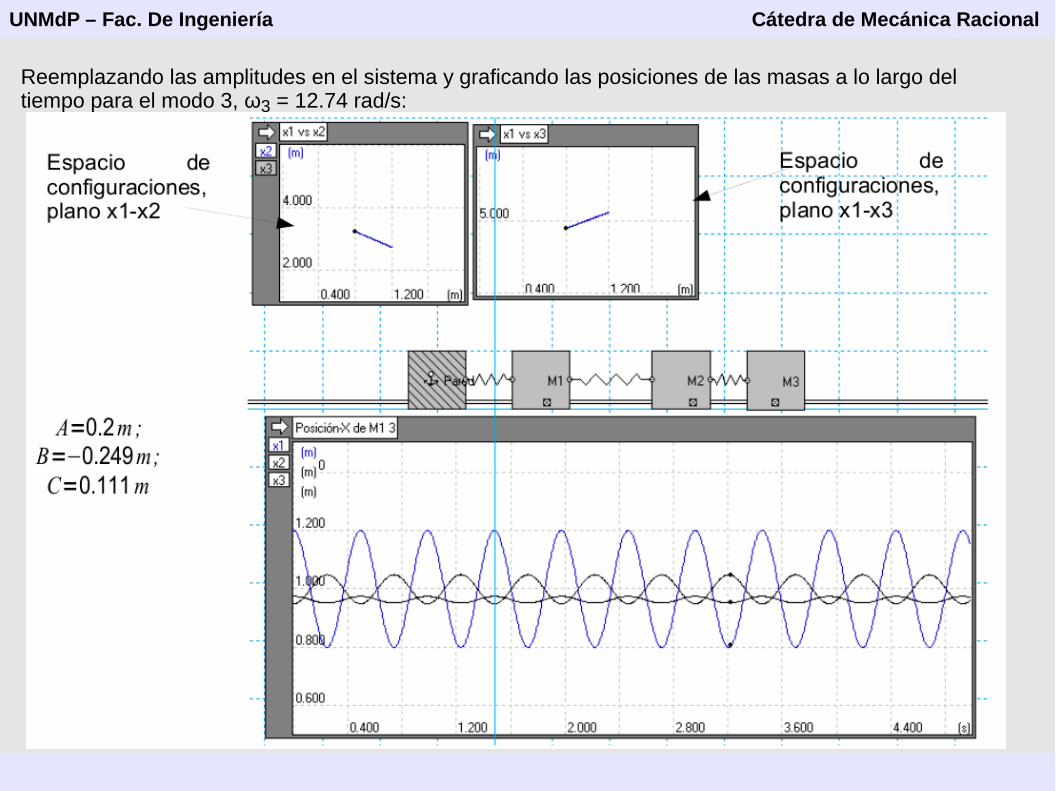
Reemplazando las amplitudes en el sistema y graficando las posiciones de las masas a lo largo del tiempo para el modo 3, ω3 = 12.74 rad/s:
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
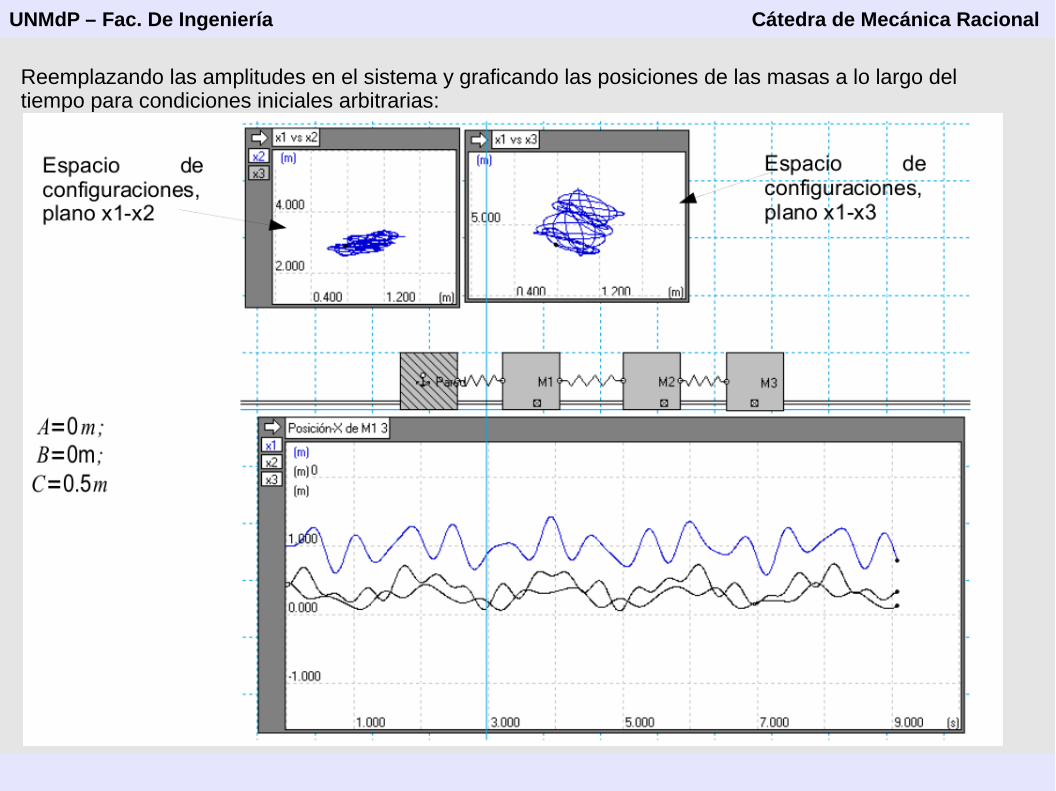
Reemplazando las amplitudes en el sistema y graficando las posiciones de las masas a lo largo del tiempo para condiciones iniciales arbitrarias:
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional
Autores:Gustavo Carr, PhD. Ing. Luciano Paolinelli, PhD. Ing.
Creado para la asignatura Mecánica Racional de la Facultad de Ingeniería, Universidad Nacional de Mar del Plata:
Prof. Titular: Adrián Cisilino, PhD. Ing.Prof. Adjunto: Aníbal Márquez, Ing. Mec.
Bajo licencia Creative Commons Argentina (CC) NonCommercial-ShareAlike 3.0 http://creativecommons.org/licenses/by-nc-sa/3.0
Realizado con el Software LibreOffice 3.1 y Gimp 2.6, excepto WorkingModel® Demo Version
www.libreoffice.orgwww.gimp.org
Octubre de 2012
UNMdP – Fac. De Ingeniería Cátedra de Mecánica Racional