identifikacija pojednostavljenog dinamickog modela...
TRANSCRIPT
SVEUCILIŠTE U ZAGREBUFAKULTET ELEKTROTEHNIKE I RACUNARSTVA
DIPLOMSKI RAD br. 1501
Identifikacija pojednostavljenogdinamickog modela vjetroagregatai sinteza modelskog prediktivnog
regulatoraMarijo Kvesic
Zagreb, srpanj 2017.

Posebno se zahvaljujem Nikoli Hureu koji je u svakom trenutku bio dostupan te je
uvijek bio spreman pomoci. Bez njega bi bilo mnogo teže uspješno izraditi Diplomski
rad.
Uz njega zahvalio bih se i mentoru prof. dr. sc. Nedjeljku Pericu na ukazanom
povjerenju te mojoj obitelji koji su mi bili podrška prilikom izrade Diplomskog rada.
Još jednom svima hvala od srca.
iii

Slika 1
iv

SADRŽAJ
1. Uvod 1
2. Nelinearni pojednostavljeni model vjetroagregata 32.1. Model njihanja vrha tornja . . . . . . . . . . . . . . . . . . . . . . . 4
2.2. Model njihanja vrha lopatica . . . . . . . . . . . . . . . . . . . . . . 4
2.3. Dinamicki model rotora . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4. Dinamika servo pogona . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.5. Aerodinamicki model turbine . . . . . . . . . . . . . . . . . . . . . . 8
2.6. Identifikacija parametara nelinearnog modela . . . . . . . . . . . . . 8
2.7. Validacija pojednostavljenog nelinearnog modela . . . . . . . . . . . 9
3. Linearizacija pojednostavljenog nelinearnog modela 163.1. Diskretizacija lineariziranog modela . . . . . . . . . . . . . . . . . . 18
4. Modelski prediktivni regulator vjetroagregata 214.1. Kriterijska funkcija regulatora . . . . . . . . . . . . . . . . . . . . . 22
4.2. Ogranicenja upravljackih varijabli i varijabli stanja sustava . . . . . . 26
4.3. Validacija modelskog prediktivnog regulatora . . . . . . . . . . . . . 28
5. Zakljucak 38
6. Literatura 39
v

1. Uvod
U svijetu se sve veci interes pridaje obnovljivim izvorima energije. Obnovljivi iz-
vori energije postaju sve potrebniji jer se predvida da ce se do kraja stoljeca po-
trošiti rezerve neobnovljivih izvora energije(McLamb Eric,Energy’s Future Today ,
FossilsFuelsvsRenewableEnergyResources, www.ecology.com/2011/09/06/fossil-
fuels-renewable-energy-resources, 6.9.2011.). Obnovljivi izvori su ekološki prihvatlji-
viji, a covjecanstvo ima sve više problema s globalnim zatopljenjem te staklenickim
plinovima. Postoje predvidanja da ce zbog globalnog zatopljenja život na Zemlji biti
drugaciji ili možda nemoguc. Sve su to razlozi zbog kojih se okrecemo obnovljivim
izvorima energije. Energija vjetra jedan je od obnovljivih izvora energije. Iako se na
mnogim mjestima koristi, nije oblik energije na koji se možemo osloniti s obzirom na
njegovu stohasticku prirodu. Bez obzira na to u zadnjem desetljecu je najbrže rastuci
oblik energije po udjelu u ukupnoj proizvedenoj elektricnoj energiji. Slika 1.1 (GWEC,
Global Wind Report, Globalstatistics, www.gwec.net/global-figures/graphs/, travanj
2017.) prikazuje koliko je instalirano energije u svijetu u razdoblju od 2001. do 2016.
godine. Pokušava se umanjiti negativan utjecaj stohasticke prirode vjetra, a da se dobije
maksimalna iskoristivost snage vjetra. Razvojem tehnologija sve su vece dimenzije
vjetroagregata i s time povezana nazivna snaga vjetroagregata. Povecanjem dimenzija
vjetroagregata sve je više strukturnih opterecenja koje treba uzeti u obzir radi pove-
canja životnog vijeka vjetroagregata. Produljenje životnog vijeka vjetroagregata uz
povecanje proizvedene enrgije cini vjetroagregat ekonomski prihvatljivijom opcijom
te konkurentnijom u odnosu na ostale proizvodace elektricne energije.
1
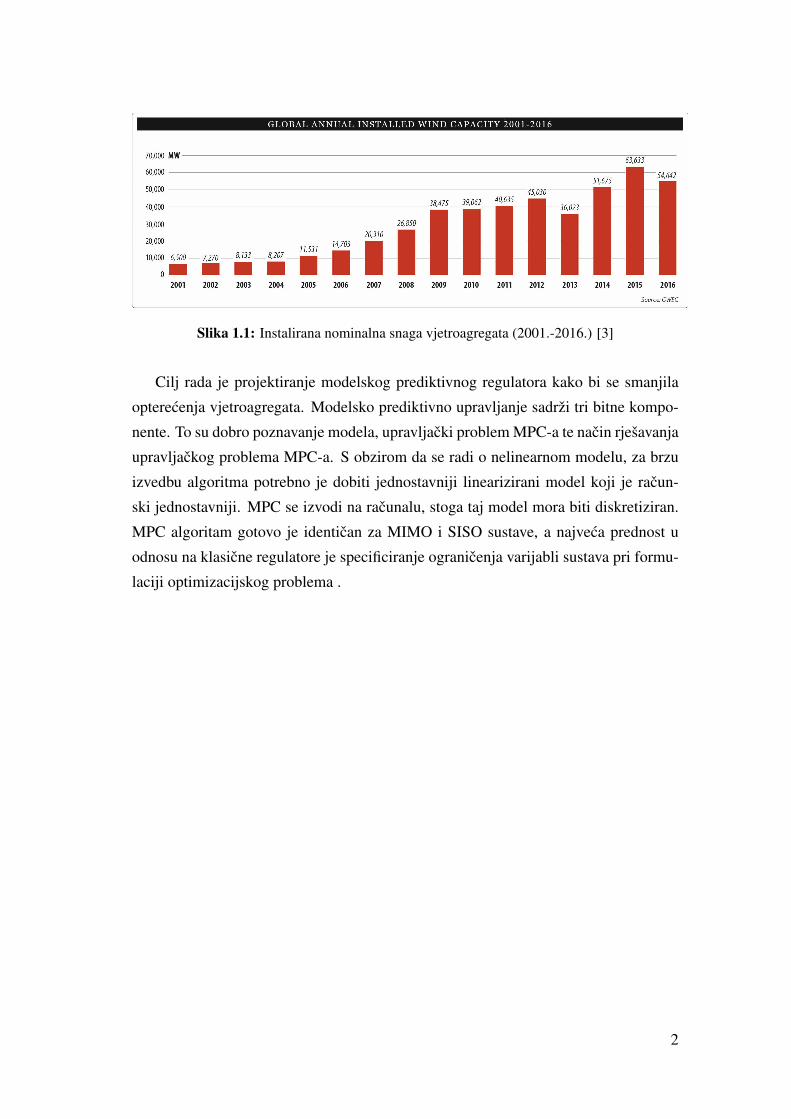
Slika 1.1: Instalirana nominalna snaga vjetroagregata (2001.-2016.) [3]
Cilj rada je projektiranje modelskog prediktivnog regulatora kako bi se smanjila
opterecenja vjetroagregata. Modelsko prediktivno upravljanje sadrži tri bitne kompo-
nente. To su dobro poznavanje modela, upravljacki problem MPC-a te nacin rješavanja
upravljackog problema MPC-a. S obzirom da se radi o nelinearnom modelu, za brzu
izvedbu algoritma potrebno je dobiti jednostavniji linearizirani model koji je racun-
ski jednostavniji. MPC se izvodi na racunalu, stoga taj model mora biti diskretiziran.
MPC algoritam gotovo je identican za MIMO i SISO sustave, a najveca prednost u
odnosu na klasicne regulatore je specificiranje ogranicenja varijabli sustava pri formu-
laciji optimizacijskog problema .
2
2. Nelinearni pojednostavljeni modelvjetroagregata
Kao što je receno u uvodu, vjetroagregat ce se regulirati modelskim prediktivnim re-
gulatorom. Svaki oblik regulacije nekog sustava zahtijeva dobro poznavanje sustava,
to jest potrebno je poznavati model sustava kojim se upravlja.
Model stvarnog vjetroagregata je nelinearan što otežava regulaciju. Linearizacijom
sustava u više radnih tocaka moguce je iznimno olakšati sintezu sustava upravljanja
vjetroagregatom, a da pritom linearizirani model i dalje jako dobro opisuje sustav.
U ovom poglavlju vjetroagregat snage 5 MW opisan je nelinearnim modelom koji
ukljucuje dinamiku njihanja vrha lopatica, dinamiku njihanja tornja, dinamiku servo
pogona i dinamiku rotora. Na kraju poglavlja dan je aerodinamicki model turbine
vjetroagregata. Kao referentni model s kojim ce se usporedivati dobiveni model jest
NREL-ov 5MW (Jonkmann, 2005.) model ciji su parametri prikazani u tablici 2.1.
Tablica 2.1: Tehnicki podaci NREL 5MW vjetroagregata (Jonkman, 2005.)
Nazivna snaga 5 MW
Broj lopatica 3
Promjer rotora 126 m
Visina središta rotora 90 m
Minimalna, nazivna i maksimalna brzina vjetra 3 m/s, 11.4 m/s, 25 m/s
Minimalna i nazivna brzina vrtnje rotora 6.9 okr/min, 12.1 okr/min
Masa rotora 110 000 kg
Masa gondole 240 000 kg
Masa tornja 347 460 kg
3
2.1. Model njihanja vrha tornja
Djelovanje vjetra uzrokuje silu potiska na rotoru. Ta sila potiska opterecuje cijelu
konstrukciju te dovodi do njihanja vjetroagregata. Zbog velikih dimenzija vjetroagre-
gata gibanje tornja nije zanemarivo jer opterecuje konstrukciju. Toranj se može gibati
u dva smjera. To je gibanje u smjeru vjetra te okomito na smjer vjetra. S obzirom da
je gibanje okomito na smjer vjetra mnogo manje od gibanja u smjeru vjetra, promatrat
ce se samo gibanje u smjeru vjetra, odnosno u x-osi.
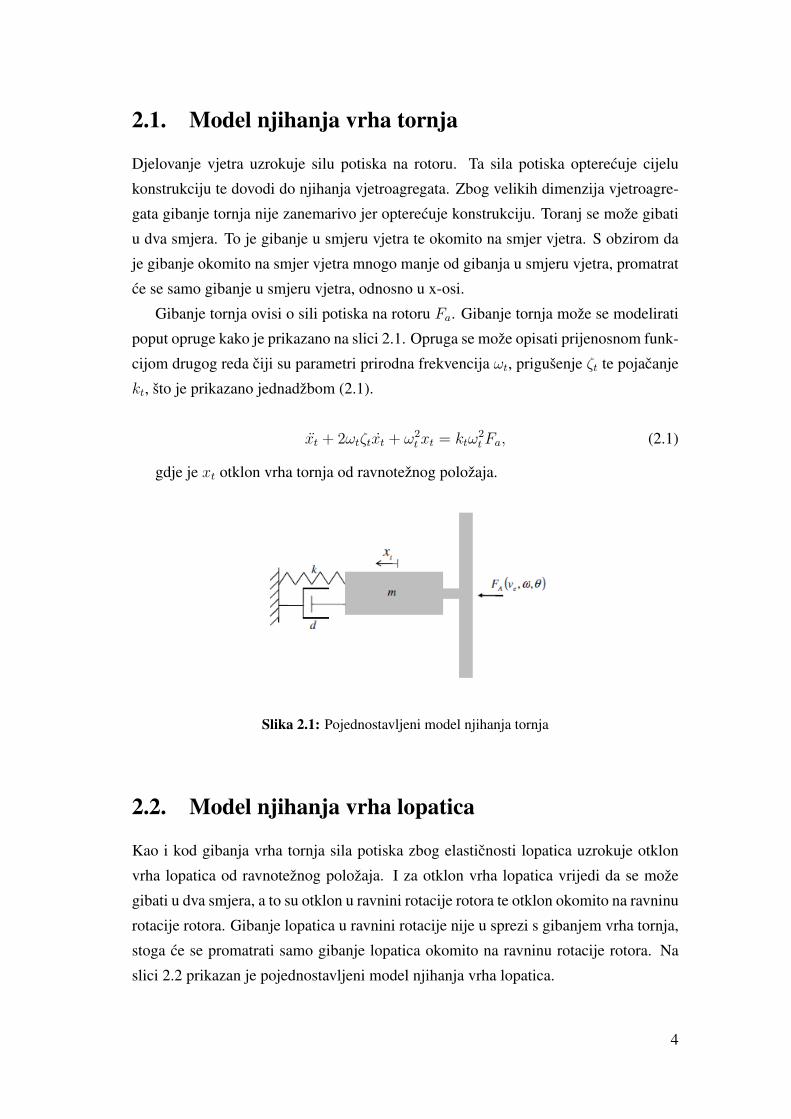
Gibanje tornja ovisi o sili potiska na rotoru Fa. Gibanje tornja može se modelirati
poput opruge kako je prikazano na slici 2.1. Opruga se može opisati prijenosnom funk-
cijom drugog reda ciji su parametri prirodna frekvencija ωt, prigušenje ζt te pojacanje
kt, što je prikazano jednadžbom (2.1).
xt + 2ωtζtxt + ω2t xt = ktω
2tFa, (2.1)
gdje je xt otklon vrha tornja od ravnotežnog položaja.
Slika 2.1: Pojednostavljeni model njihanja tornja
2.2. Model njihanja vrha lopatica
Kao i kod gibanja vrha tornja sila potiska zbog elasticnosti lopatica uzrokuje otklon
vrha lopatica od ravnotežnog položaja. I za otklon vrha lopatica vrijedi da se može
gibati u dva smjera, a to su otklon u ravnini rotacije rotora te otklon okomito na ravninu
rotacije rotora. Gibanje lopatica u ravnini rotacije nije u sprezi s gibanjem vrha tornja,
stoga ce se promatrati samo gibanje lopatica okomito na ravninu rotacije rotora. Na
slici 2.2 prikazan je pojednostavljeni model njihanja vrha lopatica.
4
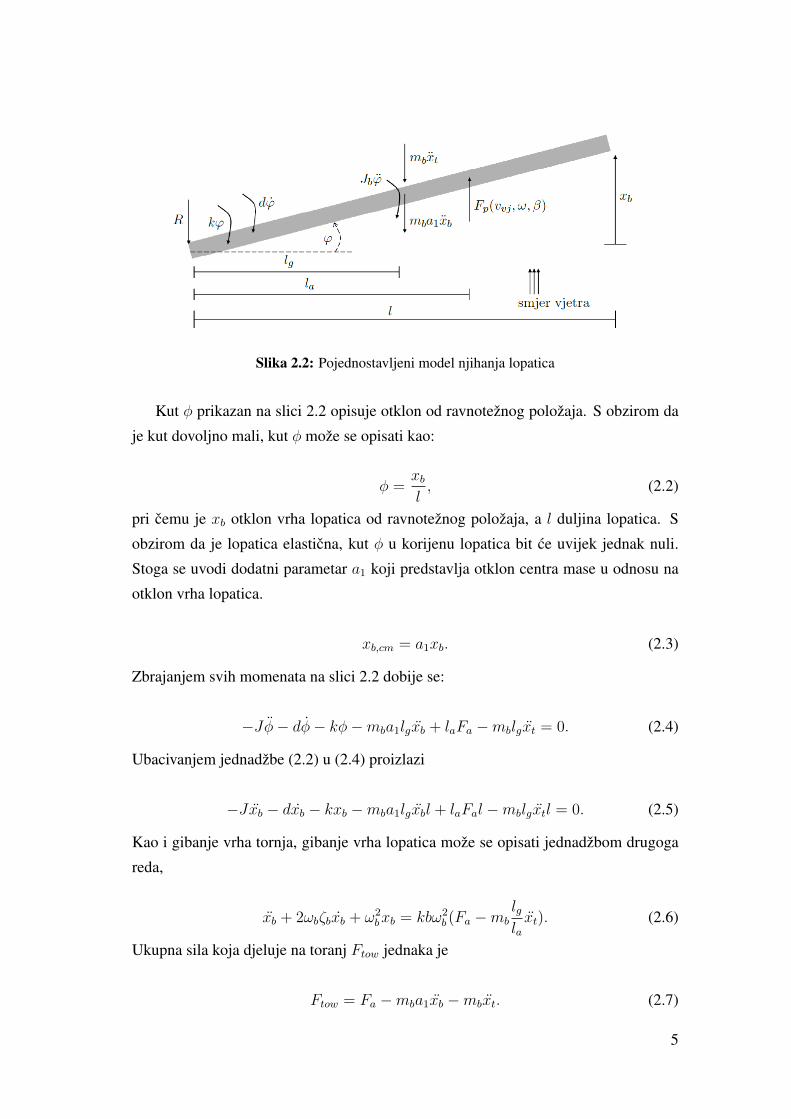
Slika 2.2: Pojednostavljeni model njihanja lopatica
Kut φ prikazan na slici 2.2 opisuje otklon od ravnotežnog položaja. S obzirom da
je kut dovoljno mali, kut φ može se opisati kao:
φ =xbl, (2.2)
pri cemu je xb otklon vrha lopatica od ravnotežnog položaja, a l duljina lopatica. S
obzirom da je lopatica elasticna, kut φ u korijenu lopatica bit ce uvijek jednak nuli.
Stoga se uvodi dodatni parametar a1 koji predstavlja otklon centra mase u odnosu na
otklon vrha lopatica.
xb,cm = a1xb. (2.3)
Zbrajanjem svih momenata na slici 2.2 dobije se:
−Jφ− dφ− kφ−mba1lgxb + laFa −mblgxt = 0. (2.4)
Ubacivanjem jednadžbe (2.2) u (2.4) proizlazi
−Jxb − dxb − kxb −mba1lgxbl + laFal −mblgxtl = 0. (2.5)
Kao i gibanje vrha tornja, gibanje vrha lopatica može se opisati jednadžbom drugoga
reda,
xb + 2ωbζbxb + ω2bxb = kbω2
b (Fa −mblglaxt). (2.6)
Ukupna sila koja djeluje na toranj Ftow jednaka je
Ftow = Fa −mba1xb −mbxt. (2.7)
5
Zadnji clan jednadžbe (2.7) vec je ukljucen u jednadžbu (2.1). Iz jednadžbi (2.1), (2.6) i
(2.7) vidi se da postoji sprega izmedu gibanja tornja i gibanja vrha lopatica. Jednadžbe
se mogu zapisati u matricnom obliku:
Mx + Dx + Cx = FFa, (2.8)
pri cemu je
x =
[xt
xb
], (2.9)
M =
[1 ktω
2tmba1
kbω2bmb
lgla
1
], (2.10)
D =
[2ωtζt 0
0 2ωbζb
], (2.11)
C =
[ω2t 0
0 ω2b
], (2.12)
M =
[ktω
2t
kbω2b
]. (2.13)
x i x predstavljaju prvu i drugu vremensku derivaciju varijable x. Konacni izrazi za xti xb zadani su u vektorskom zapisu s:
x = M−1(FFa− Dx − Cx), (2.14)
odnosno
[xt
xb
]=
[ktf
kbf
] [Fa
]+
[−ktdt −ktdb−kbdt −kbdb
][xt
xb
]+
[−ktt −ktb−kbt −kbb
][xt
xb
]. (2.15)
2.3. Dinamicki model rotora
Uz zanemarive gubitke preciznosti modela može se pretpostaviti da je osovina kruta te
su brzina vrtnje rotora i generatora povezane samo preko omjera reduktora µg. Zbog
torzija koje nastaju na osovini takva pretpostavka nije tocna, ali torzije imaju gotovo
zanemariv utjecaj, a nije potrebno uvoditi brzinu vrtnje generatora kao dodatnu slo-
bodu gibanja. Uz takvu pretpostavku vrijedi:
6

ωg = µgωr, (2.16)
gdje je ωg brzina vrtnje generatora, a ωr brzina vrtnje rotora. Prilikom racunanja ukup-
nog momenta inercije rotora potrebno je dodati moment inercije generatora skaliran na
stranu rotora. Stoga ukupan moment inercije na strani rotora iznosi:
Jr = Jgl + µ2gJg + 3Jbl. (2.17)
Tako se dobije izraz za racunanje ubrzanja rotora koji ovisi o aerodinamickom mo-
mentu i momentu generatora koji mu se suprotstavlja.
Jrωr = Ma − µgMg. (2.18)
Iz jednadžbe (2.18) dobije se brzina vrtnje rotora:
ωr =
∫Ma − µgMg
Jrdt+ ωro. (2.19)
Da bi se izracunala brzina vrtnje rotora potrebno je odrediti i iznos momenta genera-
tora. Razvijeni moment na generatoru definiran je kao omjer snage generatora i brzine
vrtnje generatora ukoliko se vjetroagregat nalazi u podrucju rada konstantne snage.
Mg =Pnazωg
=Pnazµgωr
. (2.20)
Ako vjetroagregat nije u podrucju konstantne snage, moment generatora ovisi o kva-
dratu brzine vrtnje generatora ili je jednak nuli ako je brzina vjetra ispod minimalnog
ili iznad maksimalnog iznosa (Jonkman, 2005.).
2.4. Dinamika servo pogona
Kut zakreta lopatica odreden je referencom kuta zakreta. U literaturi (Koerber, 2014.)
i (Bego, 2016.) se uglavnom dinamika servo pogona opisuje jednadžbom drugog reda,
ali dinamiku je moguce opisati jednadžbom prvog reda koja daje zadovoljavajuce re-
zultate što je prikazano u kasnijim poglavljima. Jednadžba (2.21) opisuje dinamiku
servo pogona.
βref = kββ + β. (2.21)
S obzirom da je jedna od upravljackih varijabli vremenska derivacija referentnog kuta
zakreta lopatica, potrebno je vremenski derivirati izraz (2.21) iz cega proizlazi:
7
βref = kββ + β. (2.22)
2.5. Aerodinamicki model turbine
Potisna sila na rotor vjetroagregata te zakretni moment turbine najcešce se opisuju kva-
zistacionarnim nelinearnim modelom. Tim modelom potisna sila i zakretni moment
odredeni su brzinom vjetra, brzinom vrtnje rotora te kutom zakreta lopatica. Varijable
stanja u ovom modelu su otklon vrha lopatica od ravnotežnog stanja, brzina vrha lopa-
tica, otklon vrha tornja od ravnotežnog stanja, brzina vrha tornja, kut zakreta lopatica,
brzina kuta zakreta lopatica, brzina vrtnje rotora te moment generatora. Poremecajna
varijabla modela je efektivna brzina vjetra. Potisna sila i zakretni moment bit ce opi-
sani nelinearnom funkcijom u ovisnosti o navedenim velicinama te se nece koristiti
uvriježeno korišteni kvazistacionarni model. Dakle,
Fa = f(xb, xb, xt, xt, β, β, ωr,Mg, vvj), (2.23)
te
Ma = f(xb, xb, xt, xt, β, β, ωr,Mg, vvj). (2.24)
2.6. Identifikacija parametara nelinearnog modela
Za spregnuti model gibanja vrha tornja i otklona vrha lopatica vrijedi jednadžba (2.8).
Parametre koje je potrebno identificirati su frekvencija prirodnih oscilacija gibanja tor-
nja i vrha lopatica, prigušenje vrha tornja i oscilacija, pojacanje njihanja vrha tornja
i lopatica te parametar a1 i omjer lgla
. Pojacanja se identificiraju u stacionarnom sta-
nju. Prirodna frekvencija i prigušenje njihanja tornja odredeni minimizacijom kvadrata
pogreške uz iskljucen stupanj slobode otklona vrha lopatica, a prirodna frekvencija i
prigušenje otklona vrha lopatica odredeni su minimizacijom kvadrata pogreške uz is-
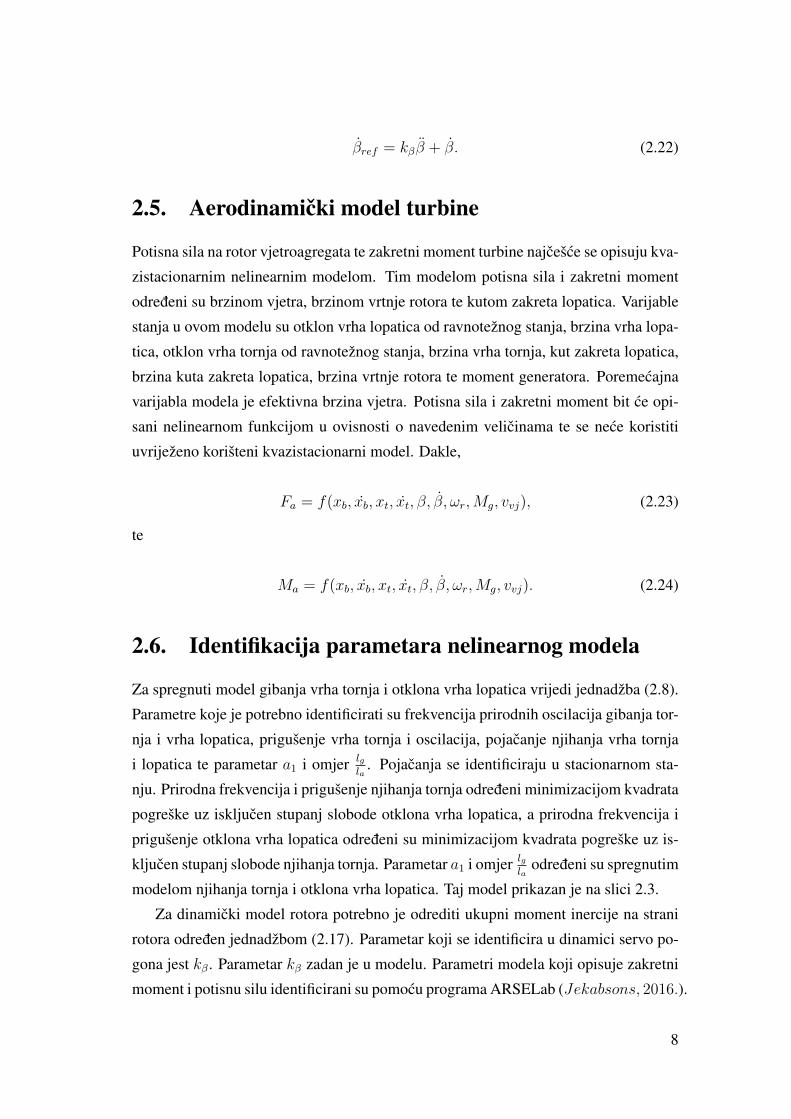
kljucen stupanj slobode njihanja tornja. Parametar a1 i omjer lgla
odredeni su spregnutim
modelom njihanja tornja i otklona vrha lopatica. Taj model prikazan je na slici 2.3.
Za dinamicki model rotora potrebno je odrediti ukupni moment inercije na strani
rotora odreden jednadžbom (2.17). Parametar koji se identificira u dinamici servo po-
gona jest kβ . Parametar kβ zadan je u modelu. Parametri modela koji opisuje zakretni
moment i potisnu silu identificirani su pomocu programa ARSELab (Jekabsons, 2016.).
8
Slika 2.3: Spregnuti model njihanja tornja i otklona vrha lopatica
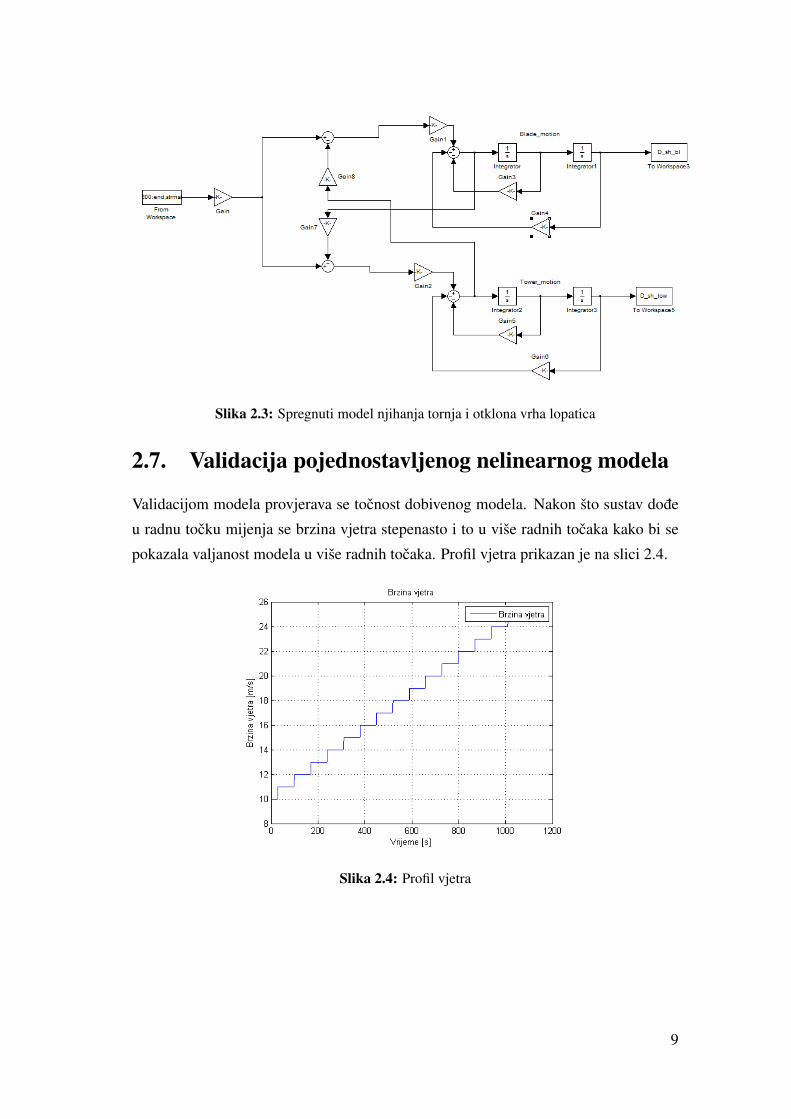
2.7. Validacija pojednostavljenog nelinearnog modela
Validacijom modela provjerava se tocnost dobivenog modela. Nakon što sustav dode
u radnu tocku mijenja se brzina vjetra stepenasto i to u više radnih tocaka kako bi se
pokazala valjanost modela u više radnih tocaka. Profil vjetra prikazan je na slici 2.4.
Slika 2.4: Profil vjetra
9
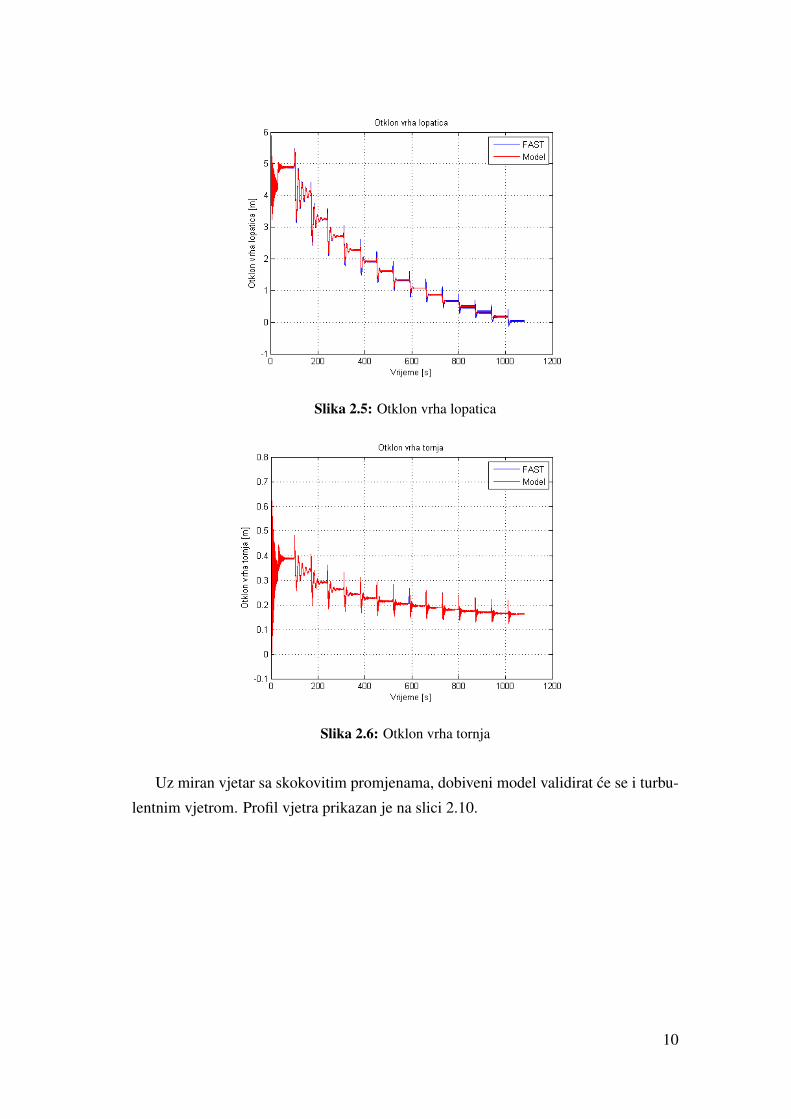
Slika 2.5: Otklon vrha lopatica
Slika 2.6: Otklon vrha tornja
Uz miran vjetar sa skokovitim promjenama, dobiveni model validirat ce se i turbu-
lentnim vjetrom. Profil vjetra prikazan je na slici 2.10.
10

Slika 2.7: Kut zakreta lopatica
Slika 2.8: Brzina vrtnje rotora
Slike 2.5-2.9 prikazuju usporedbu varijabli stanja i izlaza dobivenih modelom i u
FAST-u. Iz odziva se vidi da model jako dobro odgovara FAST-ovom modelu. Najveca
razlika je u otklonu vrha lopatica od ravnotežnog položaja gdje se pri kraju simulacije
vidi razlika u amplitudi oscilacija iako je srednja vrijednost tocna. Slike 2.11-2.15
slažu se s rezultatima dobivenim vjetrom sa skokovitim promjenama. Najveca razlika
je u izmedu dobivenog modela i FAST-ovog modela je dinamika otklona vrha lopatica
od ravnotežnog stanja.
11
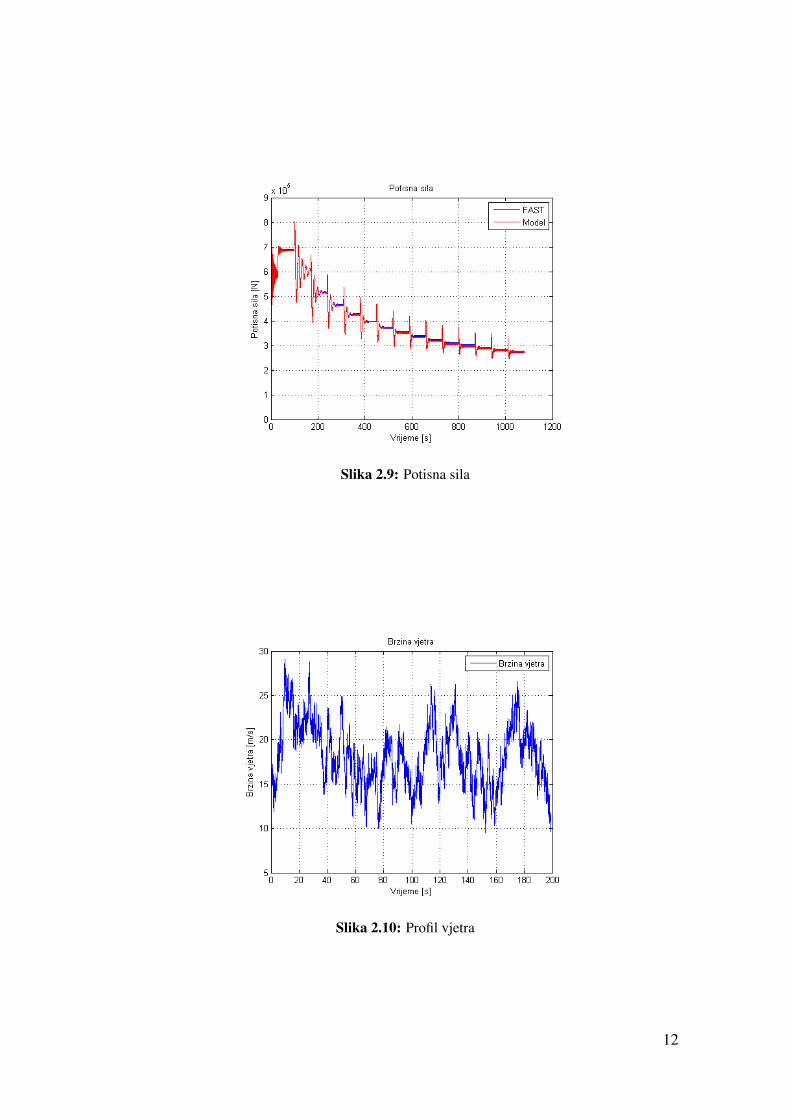
Slika 2.9: Potisna sila
Slika 2.10: Profil vjetra
12

Slika 2.11: Otklon vrha lopatica
Slika 2.12: Otklon vrha tornja
13
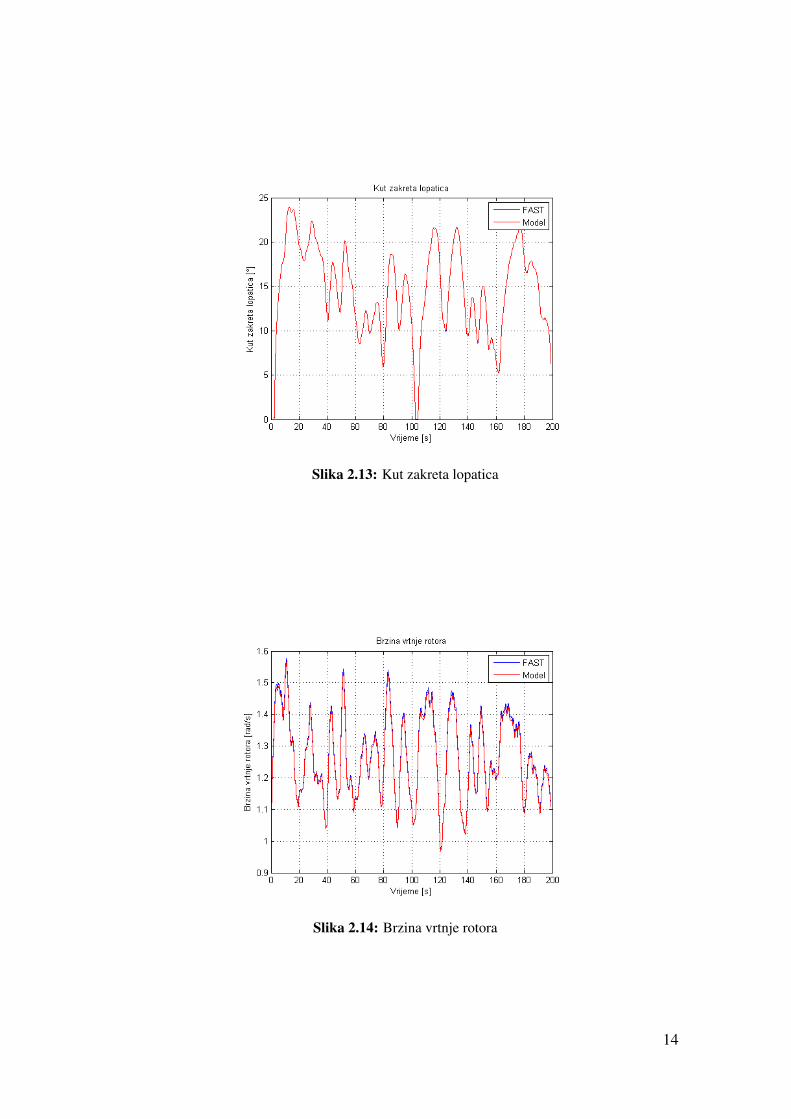
Slika 2.13: Kut zakreta lopatica
Slika 2.14: Brzina vrtnje rotora
14

Slika 2.15: Potisna sila
15
3. Linearizacija pojednostavljenognelinearnog modela
Nelinearni model dobiven u prethodnom poglavlju nije pogodan za sintezu sustava
upravljanja za izvodenje u stvarnom vremenu. Iz tog razloga potrebno je linearizirati
dobiveni model. Model se linearizira u svakom diskretnom trenutku u ovisnosti o
radnoj tocki. Linearizirani model gibanja vrha tornja opisan jednadžbom (2.1) ima
jedan promjenjivi parametar kt. Parametar kt ovisi o radnoj tocki definiranom brzinom
vjetra. Parametri ωt i ζt dobiveni su minimizacijom kvadratne pogreške izmedu modela
na slici 2.3 te FAST-ovog modela pri cemu je u oba slucaja iskljucen stupanj slobode
otklona vrha lopatica od ravnotežnog stanja. Iznosi parametara ωt i ζt su:
ωt = 6, (3.1)
ζt = 0.3. (3.2)
Linearizacija modela otklona vrha lopatica od ravnotežnog stanja takoder ima promje-
njivi parametar kb koji ovisi o brzini vjetra. Parametri ωb i ζb dobiveni su minimizaci-
jom kvadratne pogreške izmedu modela na slici 2.3 te FAST-ovog modela pri cemu je
iskljucenj stupanj slobode gibanja tornja. Iznosi parametara ωb i ζb su:
ωb = 2.4407, (3.3)
ζb = 0.014. (3.4)
Pošto su modeli gibanja vrha tornja i otklona vrha lopatica spregnuti, potrebno je i
odrediti parametre koji opisuju spregu. To su parametar a1 i omjer lgla
. Oni ne ovise o
radnim tockama te su dobiveni minimizacijom kvadrata pogreške izmedu modela na
slici 2.3 i FAST-ovog modela. Iznosi parametra a1 i omjera lgla
su:
16

a1 = 0.41, (3.5)
lgla
= 0.58. (3.6)
Moment inercije kao parametar koji odreduje dinamiku rotora nije potrebno identifi-
cirati, vec ga je moguce išcitati iz dokumentacije NREL-a. Iznos momenta inercije
je:
J = 5129725.24kgm2. (3.7)
Dinamika servo pogona takoder ne ovisi o radnoj tocki te parametar kβ iznosi:
kβ = 0.0766. (3.8)
Model koji opisuje zakretni moment i potisnu silu turbine vjetroagregata identificiran
je pomocu programa ARESLab. Program ne daje eksplicitan model, stoga je teže iden-
tificirati parametre modela. Takoder, parametri ovise o radnoj tocki, stoga je potrebno
linearizirati model u više radnih tocaka. Model ce biti zapisan u matricnom obliku:
∆x = A∆x + B∆u + E∆d, (3.9)
∆y = C∆x + F∆d, (3.10)
gdje je:
∆y =
[∆Fa
∆Ma
], (3.11)
C =
[Fxb Fdxb Fxt Fdxt Fβ Fdβ Fω FMg
Mxb Mdxb Mxt Mdxt Mβ Mdβ Mω MMg
], (3.12)
∆x =
∆xb
∆xb
∆xt
∆xt
∆β
∆β
∆ω
∆Mg
, (3.13)
17

F =
[Fws
Mws
], (3.14)
∆d = ∆vvj. (3.15)
S obzirom da su varijable stanja modela ∆x, matrice C i F definirane su parcijalnim
derivacijama izlaza po varijablama stanja u okolini radnih tocaka, to jest izracuna se
mali pomak izlaza modela u ovisnosti o malom pomaku varijabli stanja u radnoj tocki.
3.1. Diskretizacija lineariziranog modela
Radi implementacije modelskog prediktivnog upravljanja potrebno je diskretizirati do-
biveni linearizirani model. Odabrano vrijeme diskretizacije je Tzoh = 0.05 s. Takoder
je potrebno model raspisati po varijablama stanja. Varijable stanja prikazane su izra-
zom (3.13). Vektor upravljackih varijabli i poremecajnih velicina su:
∆u =
[∆Mg,ref
∆βref
](3.16)
∆d = ∆vvj. (3.17)
S obzirom da xt, xb i ω ovise o izlazima Fa iMa, izlazi se izrazom (3.10) raspišu preko
varijabli stanja i poremecajne velicine. Zapis kontinuiranog modela u prostoru stanja
glasi:
∆x = A∆x + B∆u + E∆d (3.18)
∆y = C∆x + D∆u + F∆d, (3.19)
gdje je:
18
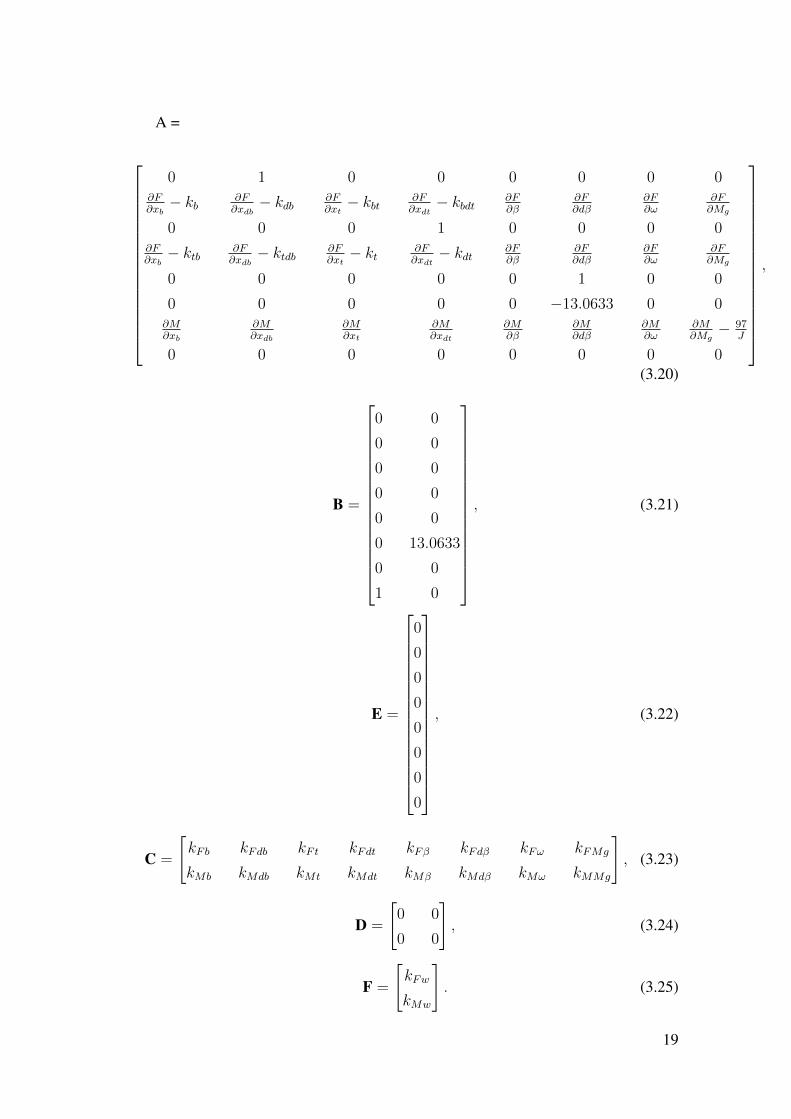
A =
0 1 0 0 0 0 0 0∂F∂xb
− kb∂F∂xdb
− kdb∂F∂xt
− kbt∂F∂xdt
− kbdt∂F∂β
∂F∂dβ
∂F∂ω
∂F∂Mg
0 0 0 1 0 0 0 0∂F∂xb
− ktb∂F∂xdb
− ktdb∂F∂xt
− kt∂F∂xdt
− kdt∂F∂β
∂F∂dβ
∂F∂ω
∂F∂Mg
0 0 0 0 0 1 0 0
0 0 0 0 0 −13.0633 0 0∂M∂xb
∂M∂xdb
∂M∂xt
∂M∂xdt
∂M∂β
∂M∂dβ
∂M∂ω
∂M∂Mg
− 97J
0 0 0 0 0 0 0 0
,
(3.20)
B =
0 0
0 0
0 0
0 0
0 0
0 13.0633
0 0
1 0
, (3.21)
E =
0
0
0
0
0
0
0
0
, (3.22)
C =
[kFb kFdb kFt kFdt kFβ kFdβ kFω kFMg
kMb kMdb kMt kMdt kMβ kMdβ kMω kMMg
], (3.23)
D =
[0 0
0 0
], (3.24)
F =
[kFw
kMw
]. (3.25)
19

Ovaj linearizirani model diskretizira se ’zoh’ metodom korištenjem MATLAB funk-
cije c2d pri cemu je vrijeme diskretizacije zadano s Tzoh = 0.05s.
20
4. Modelski prediktivni regulatorvjetroagregata
Modelsko prediktivno upravljanje odnosi se na široku klasu metoda sinteze sustava
automatskog upravljanja u kojima se koristi predikcija odziva procesa u buducnosti
pri odabiru upravljackog signala kojim ce se ostvariti željeno ponašanje procesa. Iako
postoji i MPC s vremenski kontinuiranim modelom procesa, zbog implentacije MPC-a
na racunalu, najcešce se koristi MPC s vremenski diskretnim modelom procesa. Bi-
tan dio MPC-a je odabir predikcijskog horizonta. Ukoliko bi predikcijski horizont
bio beskonacan, bilo bi moguce jamciti stabilnost, ali s obzirom da to nije slucaj, to
dovodi do mnogih teoretskih problema. Takoder, prilicno veliki problem prilikom im-
plementacije MPC algoritma su veliki racunski zahtjevi te se upotreba MPC algoritma
ogranicava na procese koji imaju dovoljno veliko vrijeme uzorkovanja. S druge strane,
primjena MPC-a se konceptualno ne razlikuje za SISO i MIMO sustave te je MPC al-
goritam jedinstven po mogucnosti ogranicavanja procesnih varijabli što nije slucaj kod
klasicnih metoda sinteze. Kod online implementacije MPC-a principom pomicnog
horizonta omogucuje se povratna veza. U svakom koraku uzorkovanja rješava mate-
maticki problem ostvarenja željenog ponašanja modela pri cemu se racuna upravljacka
sekvenca u buducnosti koja najbolje ostvaruje cilj upravljanja zadan na predikcijskom
horizontu. Princip pomicnog horizonta prikazan je na slici 4.1.
21

Slika 4.1: Princip pomicnog horizonta
Kvaliteta MPC algoritma ovisi o dobrom poznavanju matematickog modela te o
poznavanju poremecaja koji djeluju na proces. Dobiveni model se koristi prilikom
predikcije nekoliko koraka unaprijed te nedovoljno tocan model može dovesti do neže-
ljenog ponašanja procesa. Uz to važni dijelovi MPC algoritma su kriterijska funkcija,
ogranicenja procesnih varijabli te nacin rješavanja upravljackog problema. Kriterijska
funkcija i ogranicenja procesnih varijabli spadaju u upravljacki problem. Kriterijskom
funkcijom odreduje se kako se kažnjavaju odstupanja od referenci te kolikog iznosa tre-
baju biti upravljacke varijable kako bi se poštivala zadana ogranicenja na sustav. Cilj
MPC-a je što preciznije pracenje reference, a da pritom upravljacke varijable i ostale
procesne varijable budu unutar zadanih ogranicenja. Ta su dva kriterija suprostavljena
te se uvode težinski faktori kako bi se odredilo što ce se više penalizirati.
4.1. Kriterijska funkcija regulatora
Jedna od najcešcih kriterijskih funkcija je kvadratni kriterij koji je izabran i u ovom
radu. Iako se na sustav primjenjuje izracunata upravljacka varijabla u prvom koraku,
kriterijska funkcija se minimizira na cijelom predikcijskom horizontu. Dakle, kriterij-
ska funkcija glasi:
22

J = minuL
xTLQxL + uTLRuL, (4.1)
pri cemu je
xL =
x(1)
.
.
.
x(L)
, (4.2)
te
uL =
u(0)
.
.
.
u(L− 1)
, (4.3)
Kriterijska se funkcija minimizira po upravljackoj varijabli u stoga je varijable stanja
potrebno izraziti preko upravljackih varijabli, poremecajnih varijabli te preko pocetnih
vrijednosti varijabli stanja. Raspisivanjem nekoliko koraka upravljackih varijabli
∆x(1) = Ad∆x(0) +Bd∆u(0) + Ed∆d(0), (4.4)
∆x(2) = Ad∆x(1)+Bd∆u(1)+Ed∆d(1) = A2d∆x(0)+AdBd∆u(0)+Bd∆u(1)+AdEd∆d(0)+Ed∆d(1),
(4.5)
iz cega se može zakljuciti da je predikcija u koraku L glasi:
∆x(L) = ALd∆x(0)+AL−1d Bd∆u(0)+...+Bd∆u(L−1)+...+AL−1
d Ed∆d(0)+Ed∆d(L−1).
(4.6)
Zapis jednadžbi stanja na cijelom predikcijskom horizontu glasi:
∆xL = AL∆x0 +BL∆uL + Ed∆dL, (4.7)
a matrice su:
23
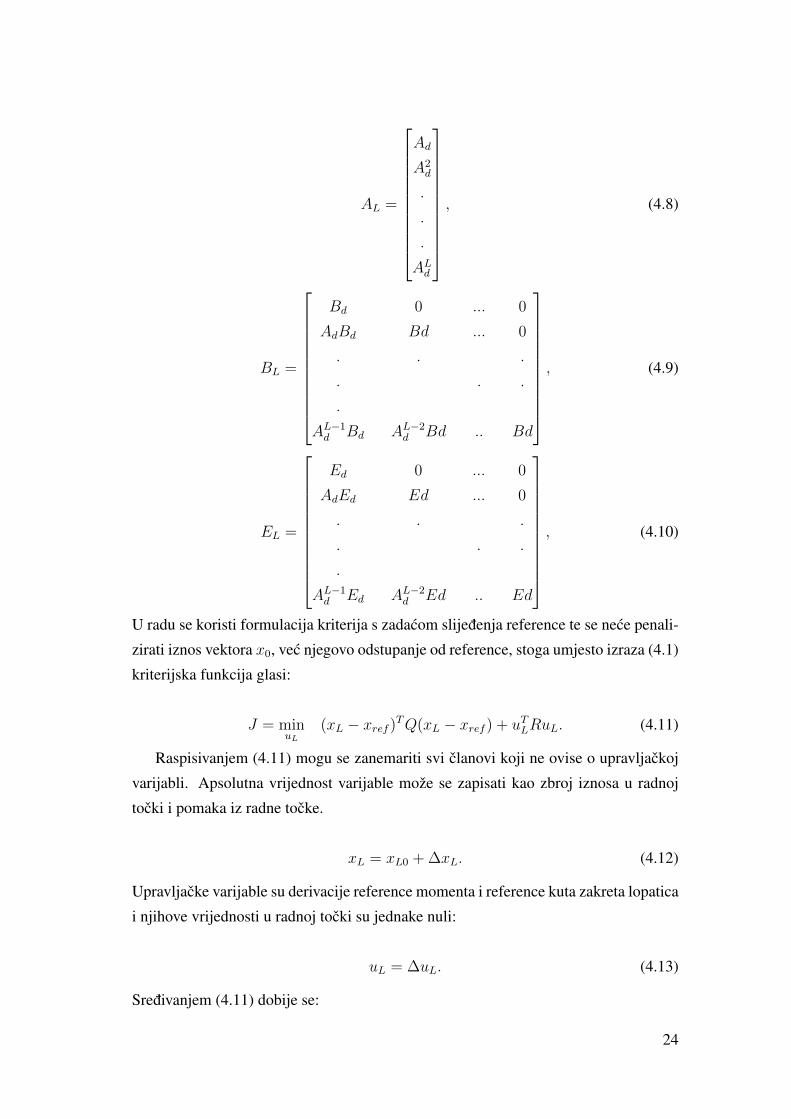
AL =
Ad
A2d
.
.
.
ALd
, (4.8)
BL =
Bd 0 ... 0
AdBd Bd ... 0
. . .
. . .
.
AL−1d Bd AL−2
d Bd .. Bd
, (4.9)
EL =
Ed 0 ... 0
AdEd Ed ... 0
. . .
. . .
.
AL−1d Ed AL−2
d Ed .. Ed
, (4.10)
U radu se koristi formulacija kriterija s zadacom slijedenja reference te se nece penali-
zirati iznos vektora x0, vec njegovo odstupanje od reference, stoga umjesto izraza (4.1)
kriterijska funkcija glasi:
J = minuL
(xL − xref )TQ(xL − xref ) + uTLRuL. (4.11)
Raspisivanjem (4.11) mogu se zanemariti svi clanovi koji ne ovise o upravljackoj
varijabli. Apsolutna vrijednost varijable može se zapisati kao zbroj iznosa u radnoj
tocki i pomaka iz radne tocke.
xL = xL0 + ∆xL. (4.12)
Upravljacke varijable su derivacije reference momenta i reference kuta zakreta lopatica
i njihove vrijednosti u radnoj tocki su jednake nuli:
uL = ∆uL. (4.13)
Sredivanjem (4.11) dobije se:
24

J = min∆uL
∆xTLQ∆x+ 2(xL0 − xref,L)TQ∆xL + ∆uTLR∆uL. (4.14)
Uvrštavanjem (4.7) u (4.14) dobije se u skracenom obliku:
J = min∆uL
∆uTLH∆uTL + f∆uL, (4.15)
pri cemu je moguce zanemariti sve clanove koji u sebi ne sadrže ∆u. Matrice H i f
jednake su:
H = BTLQBL +R, (4.16)
f = 2(AL∆x0 + ELdL)TQBL + 2(xLO − xref,L)TQBL. (4.17)
Reference koje kriterij treba pratiti su reference brzine vrtnje rotora i moment genera-
tora. Potrebno je podesiti matrice Q i R. Matrice Q i R na glavnoj dijagonali sadrže
elemente koji mogu, ali i ne moraju biti razliciti od nule. Ukoliko želimo da model
što bolje prati referencu, povecat ce se težinski koeficijenti varijabli koje želimo bolje
pratiti. To rezultira agresivnijim upravljackim varijablama što se može smanjiti pove-
canjem težinskih koeficijenata na glavnoj dijagonali matrice R. Upravljacki signali bit
ce manji, ali ce se slabije pratiti referenca. Stoga je potrebno pronaci željenu ravnotežu
izmedu koeficijenata matrica Q i R. Matrice Q i R su:
Qi, i =
0 0 0 0 0 0 0 0
0 qdb 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 qdt 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 qdβ 0 0
0 0 0 0 0 0 qω 0
0 0 0 0 0 0 0 qMg
, (4.18)
Ri,i =
[rMg 0
0 rβ
], (4.19)
gdje i ide od 1 do L. Ostali elementi kvadratnih matrica Q i R jednki su nuli.
U matrici Q varijable xt, xb i β se ne otežavaju, to jest pripadajuci koeficijenti jed-
naki su nuli jer nema smisla otežavati varijable kojima ne znamo iznos u stacionarnom
stanju. Iznos varijabli xt, xb i β u stacionarnom stanju jednak je nuli. Varijable ω i Mg
moraju pratiti referencu.
25

4.2. Ogranicenja upravljackih varijabli i varijabli sta-
nja sustava
Najveca razlika modelskog prediktivnog regulatora u odnosu na klasicne regulatore
je mogucnost poštivanja ogranicenja varijabli stanja sustava kojim se upravlja. Sva
ogranicenja na varijable moguce je prebaciti u oblik:
Aogr∆u < Bogr (4.20)
kako bi se sva ogranicenja izrazila preko varijabli stanja. Prilikom ogranicavanja va-
rijabli treba paziti da ogranicenja budu razumno postavljena. U suprotnom, prestroga
ogranicenja mogu rezultirati neizvodivošcu (engl. infeasibility) optimizacijskog pro-
blema. Ogranicenja na upravljacke varijable su preuzeta iz NREL-ove dokumentacije
(Jonkman, 2005.) i iznose:
Mg,ref,min = −15000N/s, (4.21)
Mg,ref,max = 15000N/s, (4.22)
βref,min = −0.1396rad/s, (4.23)
βref,max = 0.1396rad/s. (4.24)
U matricu Aogr poslože se jedinicne matrice, jedna s gornjim, a druga s donjim
ogranicenjem, a u Bogr poslože se ogranicenja tako da vrijedi:
Aogr∆uL < Bogr. (4.25)
Sljedece ogranicenje je ogranicenje na varijable stanja. Kut zakreta lopatica β mora
biti izmedu 0 rad i π2
rad, a maksimalna dopuštena brzina vrtnje rotora 20 posto veca
od nazivne, odnosno 1.52 rad/s. Navedena ogranicenja potrebno je prebaciti u oblik
koji odgovara izrazu (4.20). Ogranicenja se mogu zapisati kao:
xmin < xL < xmax. (4.26)
S obzirom da se ogranicavaju samo kut zakreta lopatica i brzina vrtnje, varijable stanja
xL množe se s lijeva matricom
26
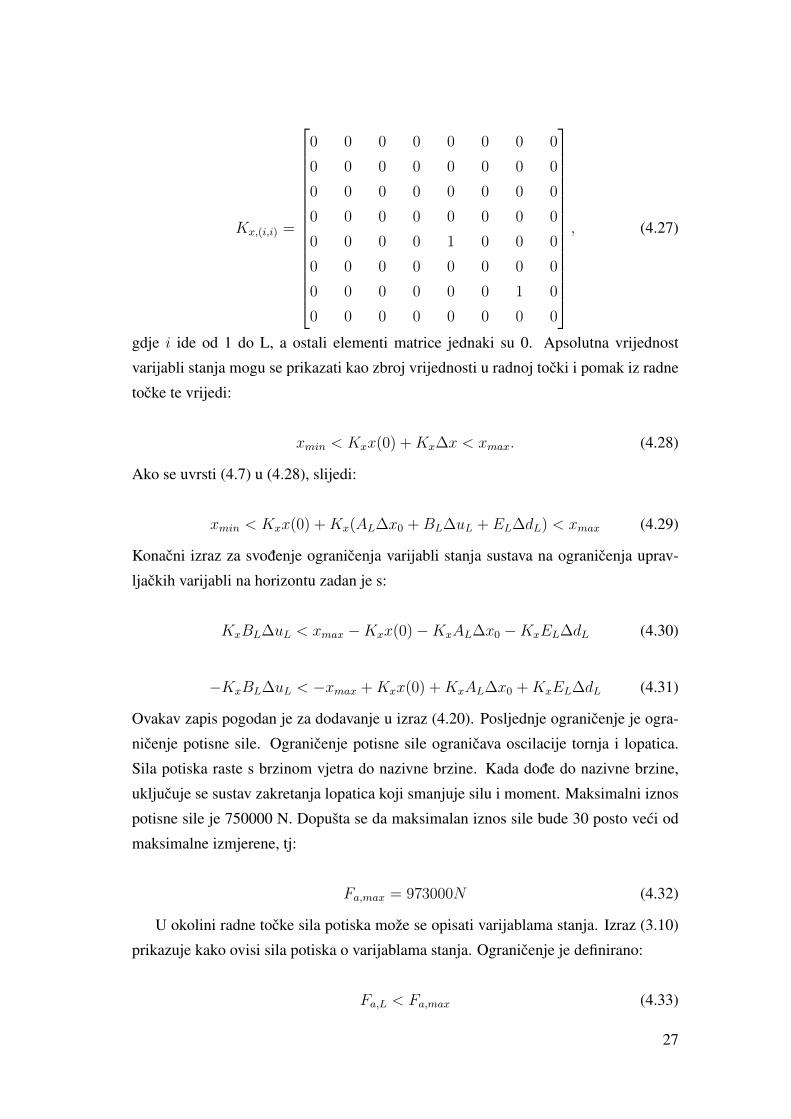
Kx,(i,i) =
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0
, (4.27)
gdje i ide od 1 do L, a ostali elementi matrice jednaki su 0. Apsolutna vrijednost
varijabli stanja mogu se prikazati kao zbroj vrijednosti u radnoj tocki i pomak iz radne
tocke te vrijedi:
xmin < Kxx(0) +Kx∆x < xmax. (4.28)
Ako se uvrsti (4.7) u (4.28), slijedi:
xmin < Kxx(0) +Kx(AL∆x0 +BL∆uL + EL∆dL) < xmax (4.29)
Konacni izraz za svodenje ogranicenja varijabli stanja sustava na ogranicenja uprav-
ljackih varijabli na horizontu zadan je s:
KxBL∆uL < xmax −Kxx(0) −KxAL∆x0 −KxEL∆dL (4.30)
−KxBL∆uL < −xmax +Kxx(0) +KxAL∆x0 +KxEL∆dL (4.31)
Ovakav zapis pogodan je za dodavanje u izraz (4.20). Posljednje ogranicenje je ogra-
nicenje potisne sile. Ogranicenje potisne sile ogranicava oscilacije tornja i lopatica.
Sila potiska raste s brzinom vjetra do nazivne brzine. Kada dode do nazivne brzine,
ukljucuje se sustav zakretanja lopatica koji smanjuje silu i moment. Maksimalni iznos
potisne sile je 750000 N. Dopušta se da maksimalan iznos sile bude 30 posto veci od
maksimalne izmjerene, tj:
Fa,max = 973000N (4.32)
U okolini radne tocke sila potiska može se opisati varijablama stanja. Izraz (3.10)
prikazuje kako ovisi sila potiska o varijablama stanja. Ogranicenje je definirano:
Fa,L < Fa,max (4.33)
27
Iznos Fa,L jednak je zbroju Fa,0 i pomaku ∆Fa,L.
Fa,0 + ∆Fa,L < Fa,max (4.34)
Raspisom δFa,L po varijablama stanja i poremecajnoj velicini dobije se:
Fa,0 + CL∆xL + FL∆dL < Fa,max (4.35)
Izraz (4.7) se zamjeni s ∆xL iz izraza (4.35) i dobije se:
Fa,0 + CL(AL∆x0 +BL∆uL + EL∆dL) + FL∆dL < Fa,max (4.36)
Konacni izraz koji zadovoljava formu izraza (4.20) glasi:
BL∆uL < Fa,max − Fa,0 − CLAL∆x0 − (CLEL + FL)∆dL (4.37)
4.3. Validacija modelskog prediktivnog regulatora
Efikasnost modelskog prediktivnog regulatora validirat ce se usporedbom odziva FAST-
ovog 5MW modela uz iskljuceni modelski prediktivni regulator te modela uz ukljuceni
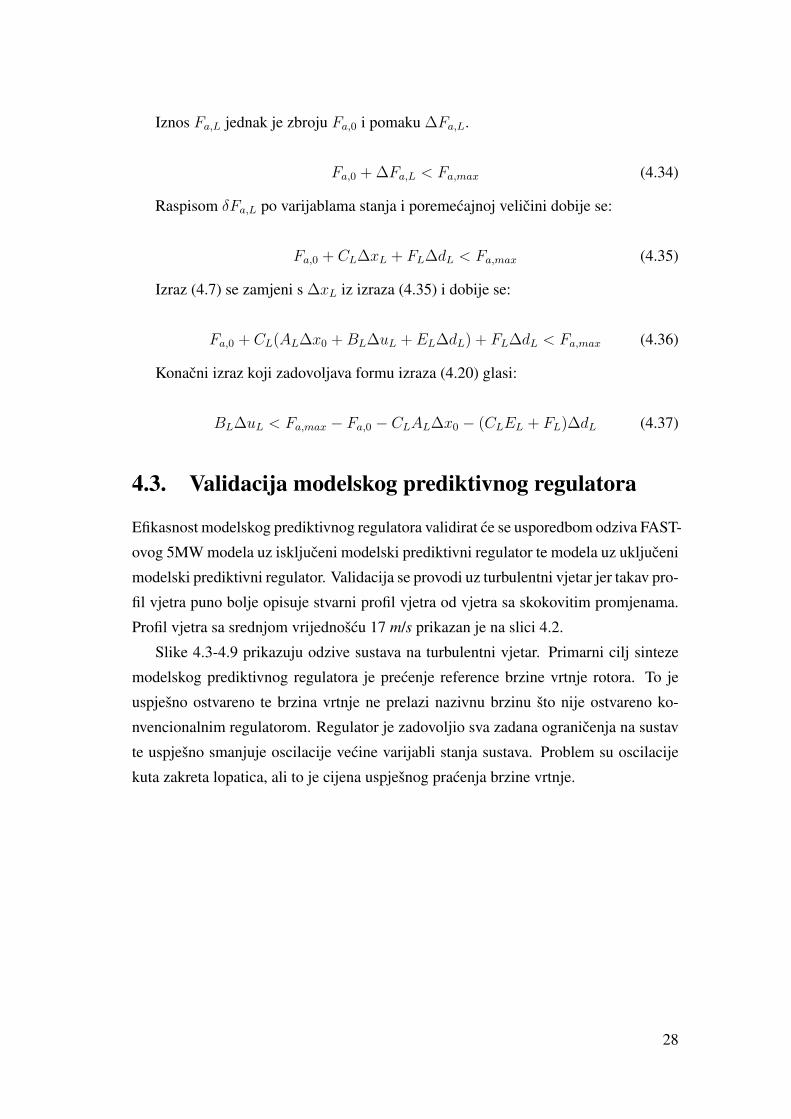
modelski prediktivni regulator. Validacija se provodi uz turbulentni vjetar jer takav pro-
fil vjetra puno bolje opisuje stvarni profil vjetra od vjetra sa skokovitim promjenama.
Profil vjetra sa srednjom vrijednošcu 17 m/s prikazan je na slici 4.2.
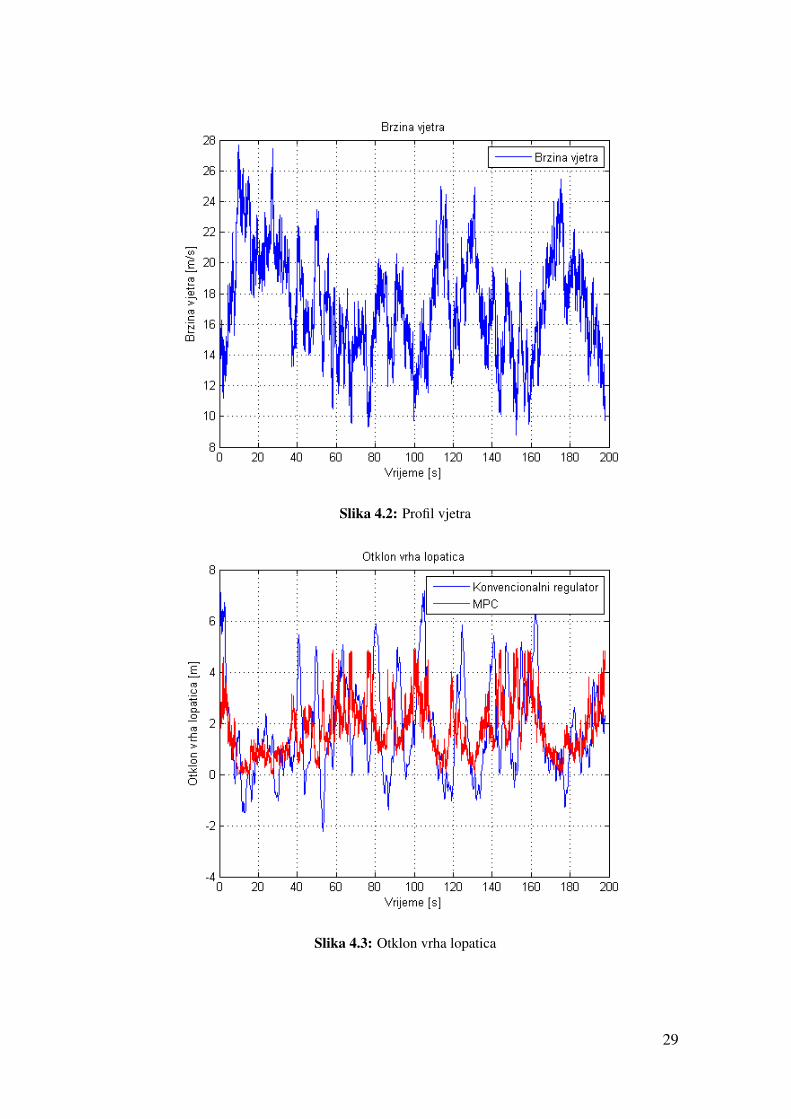
Slike 4.3-4.9 prikazuju odzive sustava na turbulentni vjetar. Primarni cilj sinteze
modelskog prediktivnog regulatora je precenje reference brzine vrtnje rotora. To je
uspješno ostvareno te brzina vrtnje ne prelazi nazivnu brzinu što nije ostvareno ko-
nvencionalnim regulatorom. Regulator je zadovoljio sva zadana ogranicenja na sustav
te uspješno smanjuje oscilacije vecine varijabli stanja sustava. Problem su oscilacije
kuta zakreta lopatica, ali to je cijena uspješnog pracenja brzine vrtnje.
28
Slika 4.2: Profil vjetra
Slika 4.3: Otklon vrha lopatica
29
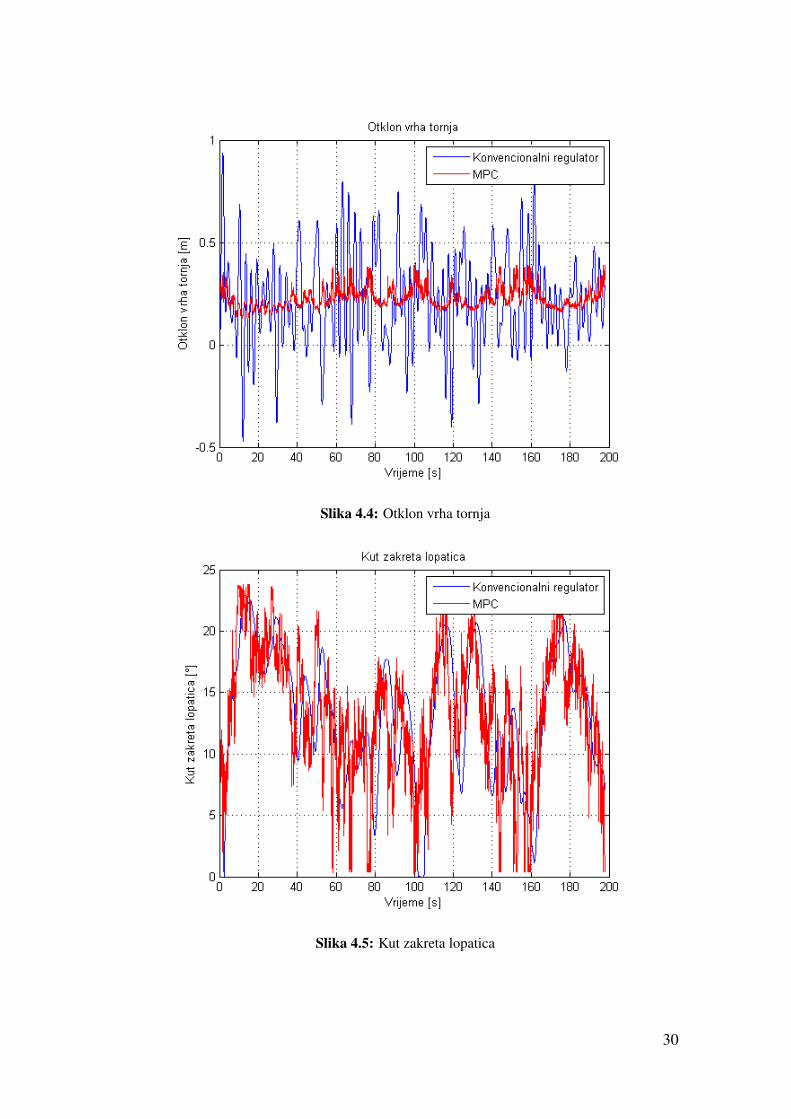
Slika 4.4: Otklon vrha tornja
Slika 4.5: Kut zakreta lopatica
30

Slika 4.6: Brzina vrtnje rotora
Slika 4.7: Moment generatora
31

Slika 4.8: Potisna sila
Slika 4.9: Aerodinamicki moment
32
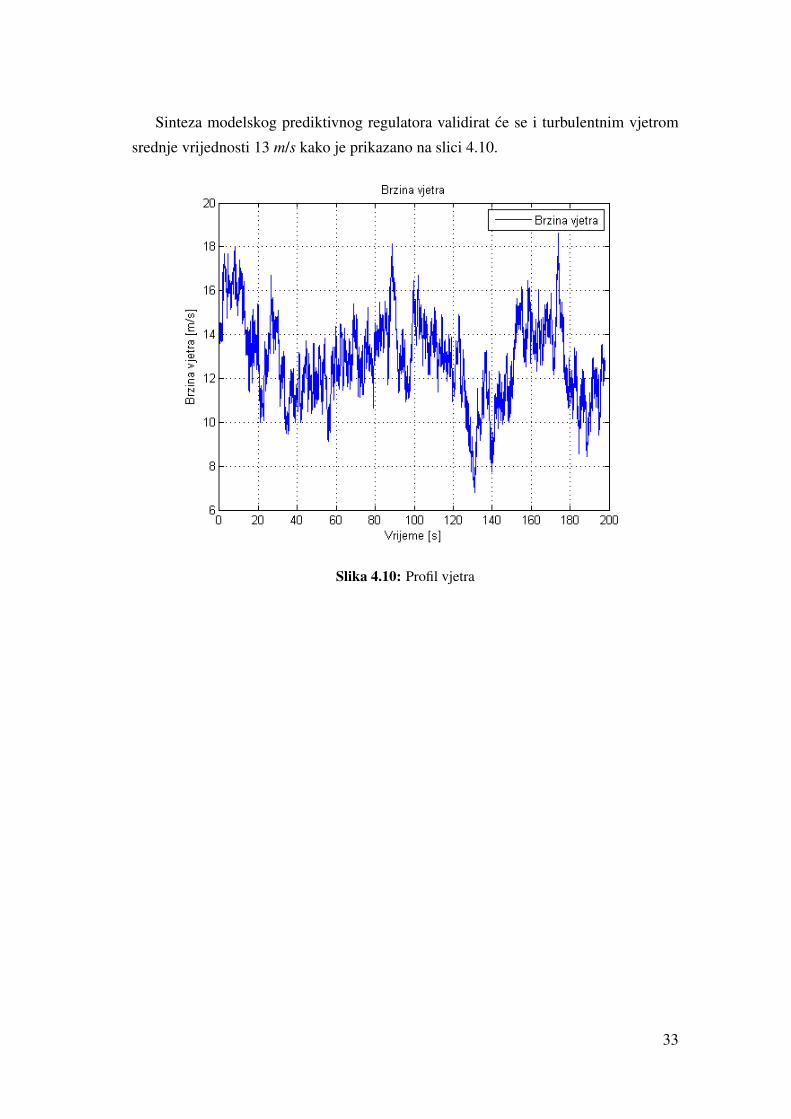
Sinteza modelskog prediktivnog regulatora validirat ce se i turbulentnim vjetrom
srednje vrijednosti 13 m/s kako je prikazano na slici 4.10.
Slika 4.10: Profil vjetra
33

Slika 4.11: Otklon vrha lopatica
Slika 4.12: Otklon vrha tornja
34

Slika 4.13: Kut zakreta lopatica
Slika 4.14: Brzina vrtnje rotora
35
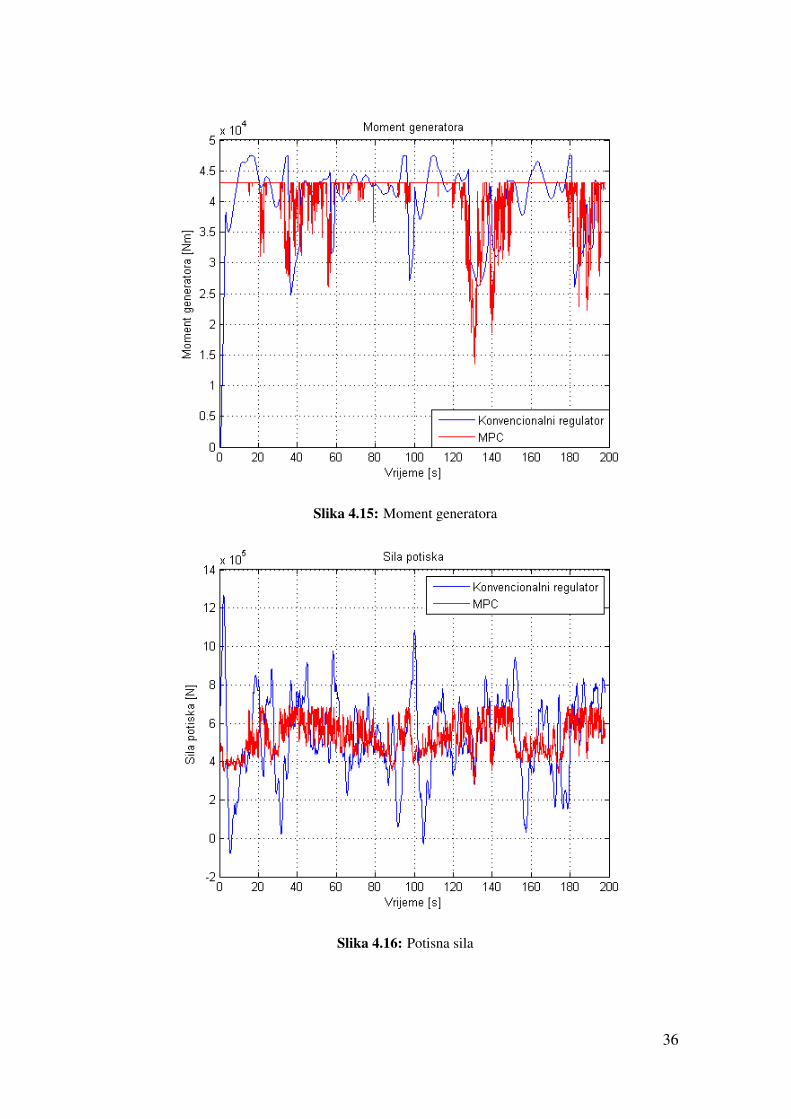
Slika 4.15: Moment generatora
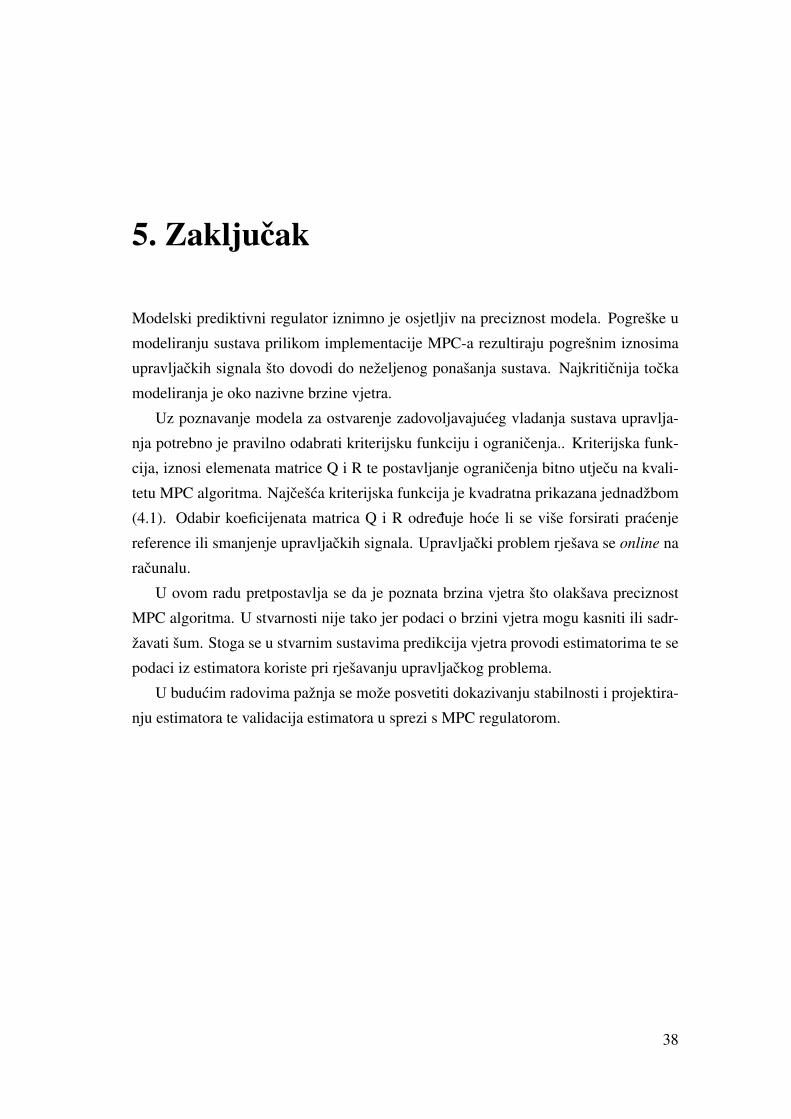
Slika 4.16: Potisna sila
36

Slika 4.17: Aerodinamicki moment
Kao i u prethodnom slucaju, brzina vrtnje rotora uspješno prati zadanu referencu.
Oscilacije su smanjenje za sve varijable stanja osim kuta zakreta lopatica što je oceki-
vano jer sustav mora pratiti kompenzirati nagle promjene brzine vjetra kako bi uspješno
pratio referencu brzine vrtnje. Takvo ponašanje može se smanjiti povecanjem težin-
skog koeficijenta brzine kuta zakreta lopatica te smanjenjem težinskog koeficijenta koji
penalizira odstupanje brzine vrtnje.
37
5. Zakljucak
Modelski prediktivni regulator iznimno je osjetljiv na preciznost modela. Pogreške u
modeliranju sustava prilikom implementacije MPC-a rezultiraju pogrešnim iznosima
upravljackih signala što dovodi do neželjenog ponašanja sustava. Najkriticnija tocka
modeliranja je oko nazivne brzine vjetra.
Uz poznavanje modela za ostvarenje zadovoljavajuceg vladanja sustava upravlja-
nja potrebno je pravilno odabrati kriterijsku funkciju i ogranicenja.. Kriterijska funk-
cija, iznosi elemenata matrice Q i R te postavljanje ogranicenja bitno utjecu na kvali-
tetu MPC algoritma. Najcešca kriterijska funkcija je kvadratna prikazana jednadžbom
(4.1). Odabir koeficijenata matrica Q i R odreduje hoce li se više forsirati pracenje
reference ili smanjenje upravljackih signala. Upravljacki problem rješava se online na
racunalu.
U ovom radu pretpostavlja se da je poznata brzina vjetra što olakšava preciznost
MPC algoritma. U stvarnosti nije tako jer podaci o brzini vjetra mogu kasniti ili sadr-
žavati šum. Stoga se u stvarnim sustavima predikcija vjetra provodi estimatorima te se
podaci iz estimatora koriste pri rješavanju upravljackog problema.
U buducim radovima pažnja se može posvetiti dokazivanju stabilnosti i projektira-
nju estimatora te validacija estimatora u sprezi s MPC regulatorom.
38

6. Literatura
1. Koerber A., Extreme and Fatigue Load Reducing Control for Wind Turbines, Tech-
nische Univesitat Berlin, Berlin, 2014.
2. Tena Bego, Optimalno upravljanje vjetrom uz ogranicavanje strukturnih optere-
cenja, Fakultet elektrotehike i racunarstva, Zagreb, 2016.
3. http : //www.gwec.net/global − figures/graphs/, 25.4.2017.
4. Jonkman, J.M. Buhl, M, FAST User’s Guide, Colorado 2005.
5. Nedjeljko Peric, Ivan Petrovic, Mario Vašak, Procesna automatizacija, Fakultet
elektrotehnike i racunarstva, Zagreb , veljaca 2013.
6. Jekabsons Gints, Adaptive Regression Splines toolbox for Matlab/Octave, Riga
Technical University Institute of Applied Computer Systems, Riga, Latvia, svibanj
2016.
39

Identifikacija pojednostavljenog dinamickog modela vjetroagregata i sintezamodelskog prediktivnog regulatora
Sažetak
Porastom dimenzija vjetroagregata povecavaju se i opterecenja što smanjuje životni
vijek vjetroagregata. Klasicni regulatori ne uspijevaju dovoljno dobro smanjiti optere-
cenja. Stoga se sve cešce koriste modelski prediktivni regulatori (MPC). MPC omogu-
cuje optimalno pracenje reference uz smanjenje strukturnih opterecenja. Poznavanje
modela, upravljacki problem i rješavanje upravljackog problema glavni su elementi
sinteze MPC regulatora. U ovom radu korišten je nelinearni model kojeg je potrebno
linearizirati te diskretizirati jer se upravljacki problem rješava na racunalu. Upravljacki
problem sadrži kriterijsku funkciju te ogranicenja varijabli. Oba segmenta upravljac-
kog problema su bitna jer lošim odabirom racunalo nece moci naci optimalne iznose
upravljackih varijabli, a da pritom varijable ostanu unutar zadanih ogranicenja.
Kljucne rijeci: Vjetroagregat, strukturna opterecenja, modelski prediktivni regulator,
upravljacki problem, kriterijska funkcija, ogranicenja

Identification of Simplified Wind Turbine Dynamical Model and ModelPredictive Controller Synthesis
Abstract
Increasingly larger wind turbines have to withstand larger structural loads. Classic
controllers are unable to cope with structural load and the need for new control method
is rising. One of the solutions is model predictive controller (MPC). MPC calculates
optimal trajectory while reducing structural loads. Wind turbine is non-linear system.
Linearising model computer can faster compute cost function. Since computer is sol-
ving MPC problem, model has to be discrete. Both, cost function and limitations has
to be carefully chosen. If limitations are to strict algorithm will not be able to calculate
optimal vector of control inputs and if limitations are to big, algorithm will not reduce
structural loads.
Keywords: Wind Turbine, Structural Loads, Model Predictive Controller, Cost Func-
tion, Constraints
41