ciclo convertidores ieee re charla
TRANSCRIPT

ESCUELA PROFESIONAL DE
INGENIERÍA ELECTRÓNICA
UNIVERSIDAD NACIONAL MAYOR DE SAN
MARCOS Facultad de Ingeniería Electrónica y Eléctrica
Expositor: Ing. Luis Alberto Rojas Tristán
Lima, 29 de Mayo del 2015

Ciclo-convertidores para el
control de velocidad en
Molinos de gran potencia

CONTENIDO 1. INTRODUCCIÓN
1.1. Minería en el Perú
1.2. Proceso productivo del cobre
2. PROCESO DE MOLIENDA
2.1. Diagrama de flujo
2.2. Molino SAG
2.3. Otros molinos (GMDs)
2.4. Arquitectura del GMD
2.5. Eficiencia del GMD
2.6. Construcción del GMD
3. CICLO-CONVERTIDORES
3.1. Ciclo-convertidor 1ø-1ø
3.2. Tipos de ciclo-convertidores 3ø
3.3. Ciclo-convertidor 3ø-1ø
3.4. Ciclo-convertidor 3ø-3ø
3.5. Convertidor de excitación
3.6. E-house

CONTENIDO 4. CONTROL DEL CICLO-CONVERTIDOR
4.1. Variación de velocidad en motores síncronos
4.2. Rango de operación del motor
4.3. Control vectorial
4.4. Diagrama de control
4.5. Arquitectura de control
5. ARMÓNICOS Y FILTROS
5.1. Armónicos presentes
5.2. Filtros
5.3. Flujo de armónicos en redes
6. CONCLUSIONES
6.1. Ventajas del GMD alimentado por ciclo-convertidor

1. INTRODUCCIÓN

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: BCRP

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: BCRP

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: BCRP

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: BCRP

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: MEM

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: MEM

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: BCRP, MEM

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ: (2014)
Fuente: BCRP, MEM

1. INTRODUCCIÓN
1.1. MINERÍA EN EL PERÚ:
Fuente: BCRP, MEM

1. INTRODUCCIÓN
1.2. PROCESO PRODUCTIVO DEL COBRE:

2. PROCESO DE MOLIENDA

2. PROCESO DE MOLIENDA
2.1. DIAGRAMA DE FLUJO:

2.1. DIAGRAMA DE FLUJO:
2. PROCESO DE MOLIENDA

2.2. MOLINO SAG:
2. PROCESO DE MOLIENDA
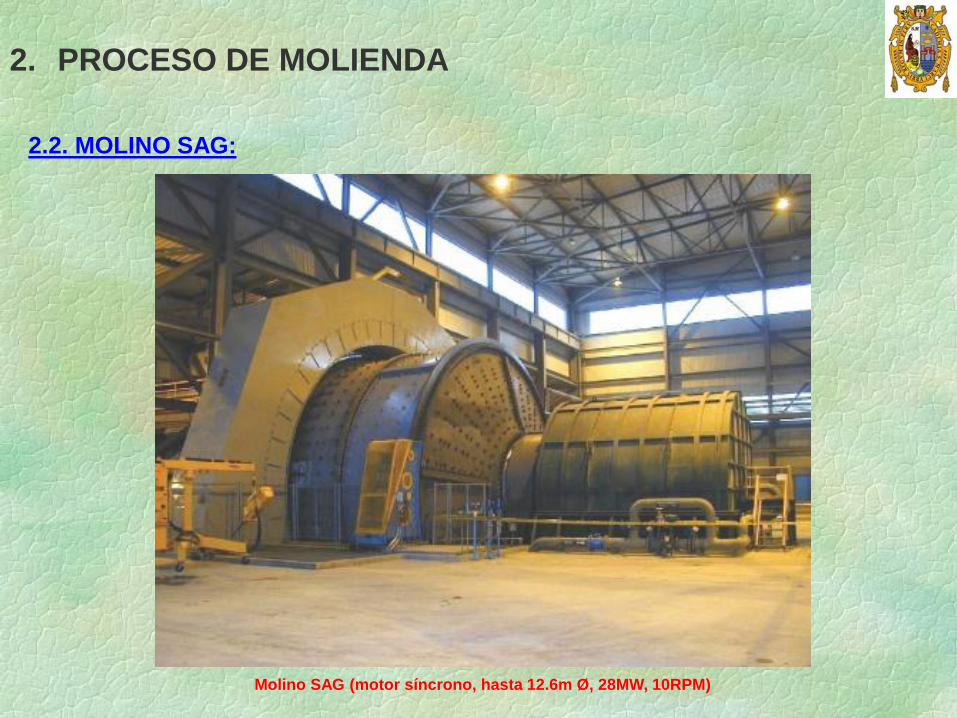
Molino SAG (motor síncrono, hasta 12.6m Ø, 28MW, 10RPM)
2.2. MOLINO SAG:
2. PROCESO DE MOLIENDA

GMD (Gearless Mill Drive)
2.2. MOLINO SAG:
2. PROCESO DE MOLIENDA
f : Frecuencia (Hz)
P : Nro. de pares de polos
Ns : Velocidad sincrónica (RPM)
f = 5.538 Hz
P = 36 pares de polos
Ns = 60xf = 60x5.538
P 36
Ns = 9.23 RPM

2.3. OTROS MOLINOS (GMDs):
2. PROCESO DE MOLIENDA
Molino SAG Molino de barras Molino de bolas

2.4. ARQUITECTURA DEL GMD:
2. PROCESO DE MOLIENDA
Fuente: ABB

2.5. EFICIENCIA DEL GMD:
2. PROCESO DE MOLIENDA
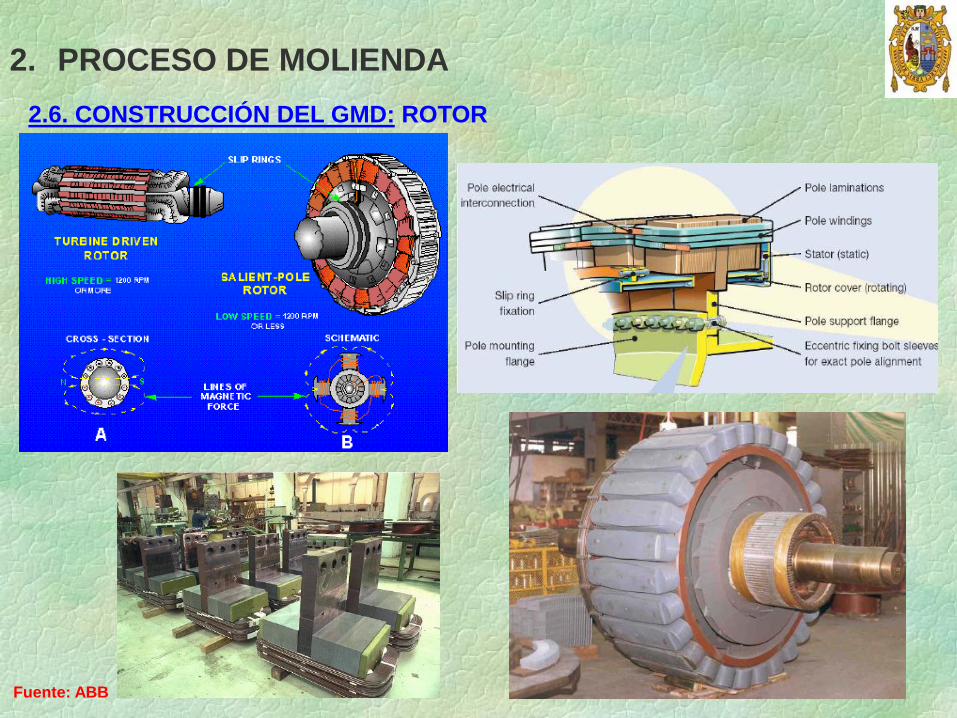
2.6. CONSTRUCCIÓN DEL GMD: ROTOR
2. PROCESO DE MOLIENDA
Fuente: ABB

2.6. CONSTRUCCIÓN DEL GMD: ESTATOR
2. PROCESO DE MOLIENDA
Fuente: ABB

3. CICLO-CONVERTIDORES

3. CICLO-CONVERTIDORES
Fuente: ABB

3.1. CICLO-CONVERTIDOR 1Ø-1Ø:
3. CICLO-CONVERTIDORES
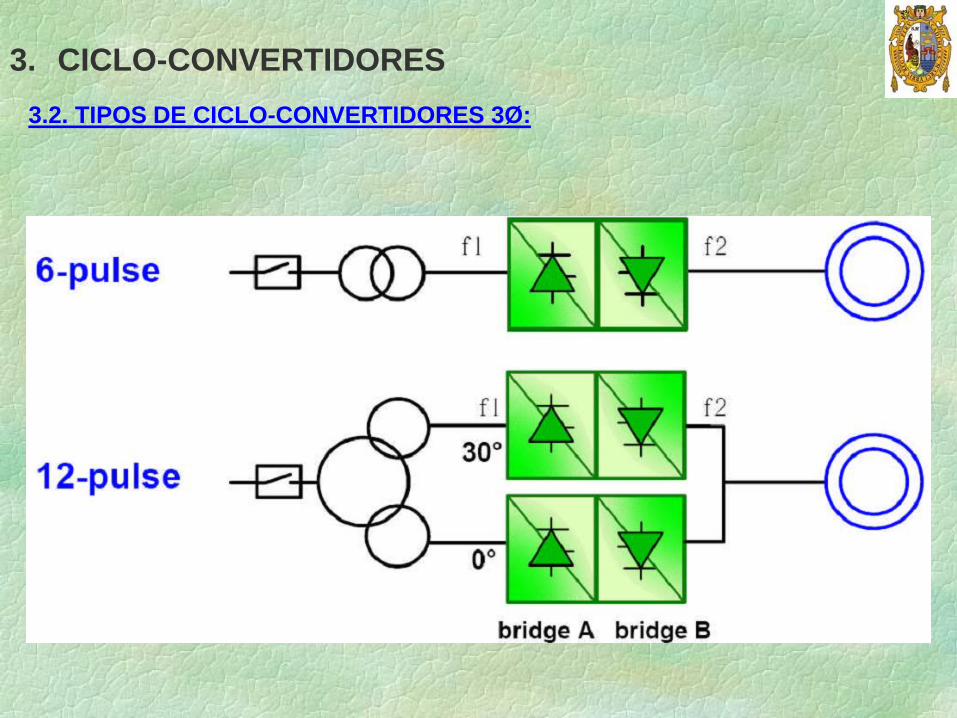
3.2. TIPOS DE CICLO-CONVERTIDORES 3Ø:
3. CICLO-CONVERTIDORES

3.2. TIPOS DE CICLO-CONVERTIDORES 3Ø:
3. CICLO-CONVERTIDORES

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 6 PULSOS

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 6 PULSOS

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS
REDUCCIÓN DEL VOLTAJE RMS

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS
CONTROL DE LA FRECUENCIA DE SALIDA

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS
ÁNGULO DE RETARDO DE DISPARO NO CONSTANTE

3. CICLO-CONVERTIDORES
3.3. CICLO-CONVERTIDOR 3Ø-1Ø: 12 PULSOS
ÁNGULO DE RETARDO DE DISPARO NO CONSTANTE
Frecuencia de Salida = [0.3 ~ 6.0] Hz.
3. CICLO-CONVERTIDORES
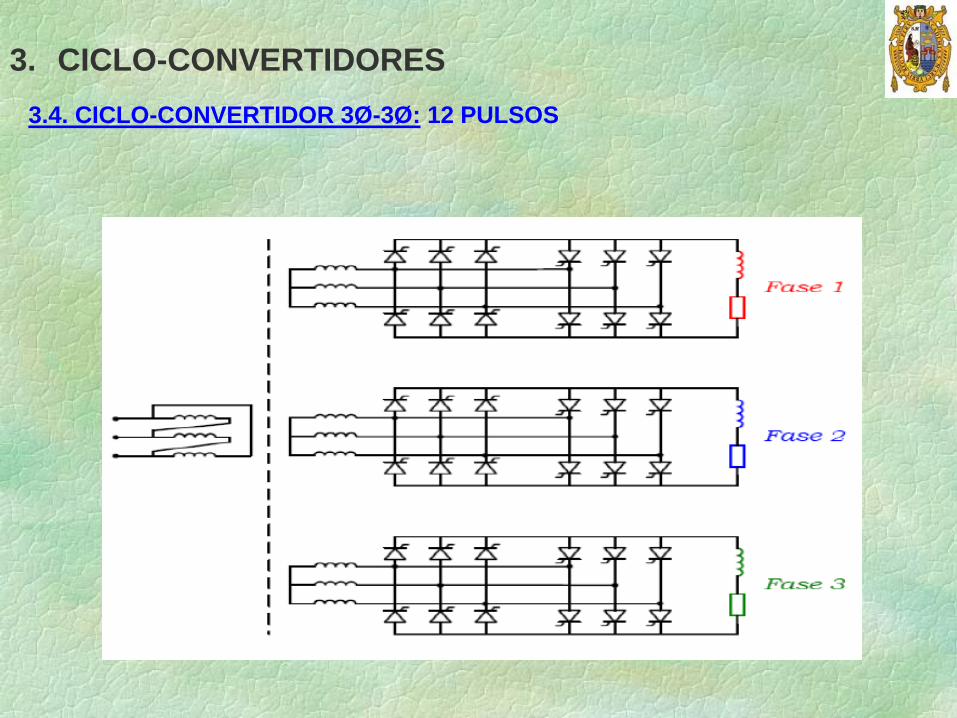
3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS

3. CICLO-CONVERTIDORES
3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS

3. CICLO-CONVERTIDORES
3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS

3. CICLO-CONVERTIDORES
3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS

3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS
3. CICLO-CONVERTIDORES
Fuente: ABB

3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS
La tensión de salida para el ciclo-convertidor de 12 pulsos es la más cercano a
lo deseado.
3. CICLO-CONVERTIDORES

3. CICLO-CONVERTIDORES
3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS
MOTORES SÍNCRONOS CON DOBLE DEVANADO ESTATÓRICO

3. CICLO-CONVERTIDORES
3.4. CICLO-CONVERTIDOR 3Ø-3Ø: 12 PULSOS
Fuente: SIEMENS

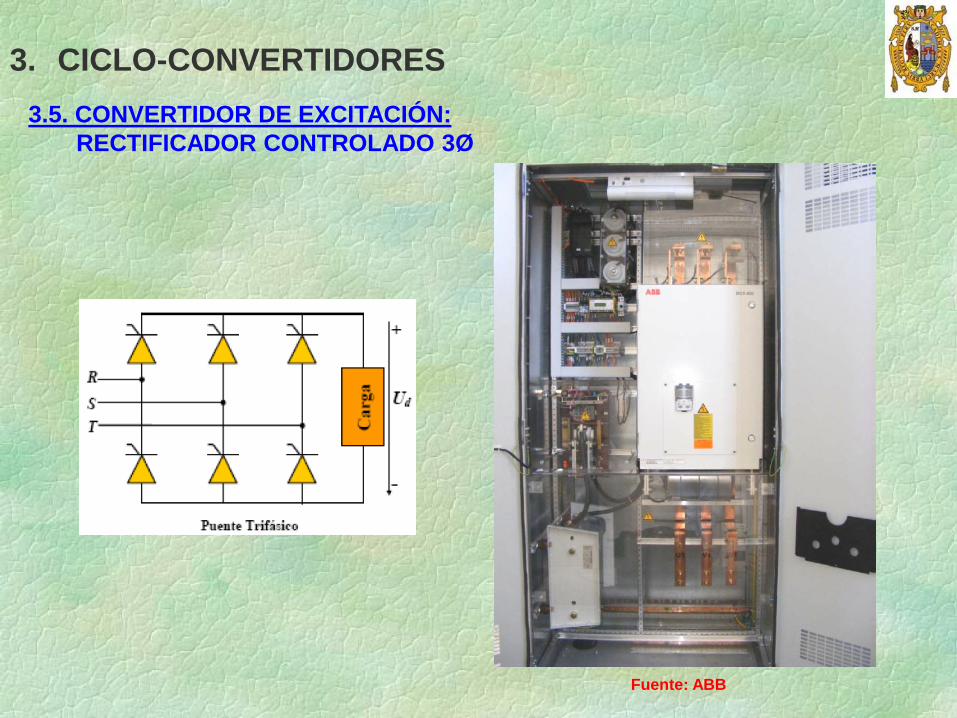
3.5. CONVERTIDOR DE EXCITACIÓN:
Fuente: ABB
3. CICLO-CONVERTIDORES
Fuente: ABB
3. CICLO-CONVERTIDORES
3.5. CONVERTIDOR DE EXCITACIÓN:
RECTIFICADOR CONTROLADO 3Ø

Fuente: ABB
3.6. E-HOUSE:
3. CICLO-CONVERTIDORES

Fuente: ABB
3.6. E-HOUSE:
3. CICLO-CONVERTIDORES

Fuente: ABB
3.6. E-HOUSE:
3. CICLO-CONVERTIDORES

Fuente: ABB
3.6. E-HOUSE:
3. CICLO-CONVERTIDORES

4. CONTROL DEL CICLO-
CONVERTIDOR

4. CONTROL DEL CICLO-CONVERTIDOR
4.1. VARIACIÓN DE VELOCIDAD EN MOTORES SÍNCRONOS:

4. CONTROL DEL CICLO-CONVERTIDOR
4.2. RANGO DE OPERACIÓN DEL MOTOR:

4. CONTROL DEL CICLO-CONVERTIDOR
4.3. CONTROL VECTORIAL:
En los motores síncronos la velocidad de giro viene directamente
determinada por la frecuencia eléctrica del estator (alimentación) y su número
de polos. Por lo tanto, hasta hace poco, la única forma de controlar su velocidad
era modificando el valor del voltaje y la frecuencia de alimentación trifásica con
métodos analógicos (Control ESCALAR).
El control Vectorial es la herramienta que permite controlar de forma óptima
los parámetros del motor al no considerar únicamente su funcionamiento
estático ante las corrientes trifásicas. Fundamentándose en un modelo preciso
del motor se considera de forma independiente la actuación sobre sus tres fases
y expresa y maneja de forma compacta el resto de las variables de fases
gracias a la teoría que se basa en la simplificación del modelo de fases del
motor, mediante la aplicación de las transformadas de Clarke y de Park.
De esta forma un sistema de corrientes balanceadas aplicadas al motor
quedarían transformadas en dos componentes de corrientes constantes en el
marco de referencia giratorio d-q.
Al aplicar estas transformaciones al modelo electromagnético del motor, se
obtiene su flujo magnético y par electromagnético, proporcionales a las
corrientes del motor Isd e Isq respectivamente en el marco giratorio, por lo que
controlando estas variables se controla el par del motor con gran calidad
dinámica.

4. CONTROL DEL CICLO-CONVERTIDOR
4.3. CONTROL VECTORIAL:
i
i
i
.
cos
-sen( - 2 / 3) -sen( - 4 / 3)
1
2
1
2
1
2
i
i
i
D
Q
o
a
b
c
2
3
2 3 4 3
cos( / ) cos( / )
sen .

4. CONTROL DEL CICLO-CONVERTIDOR
4.4. DIAGRAMA DE CONTROL:
Fuente: ABB

4. CONTROL DEL CICLO-CONVERTIDOR
4.4. DIAGRAMA DE CONTROL:
Fuente: ABB
4. CONTROL DEL CICLO-CONVERTIDOR
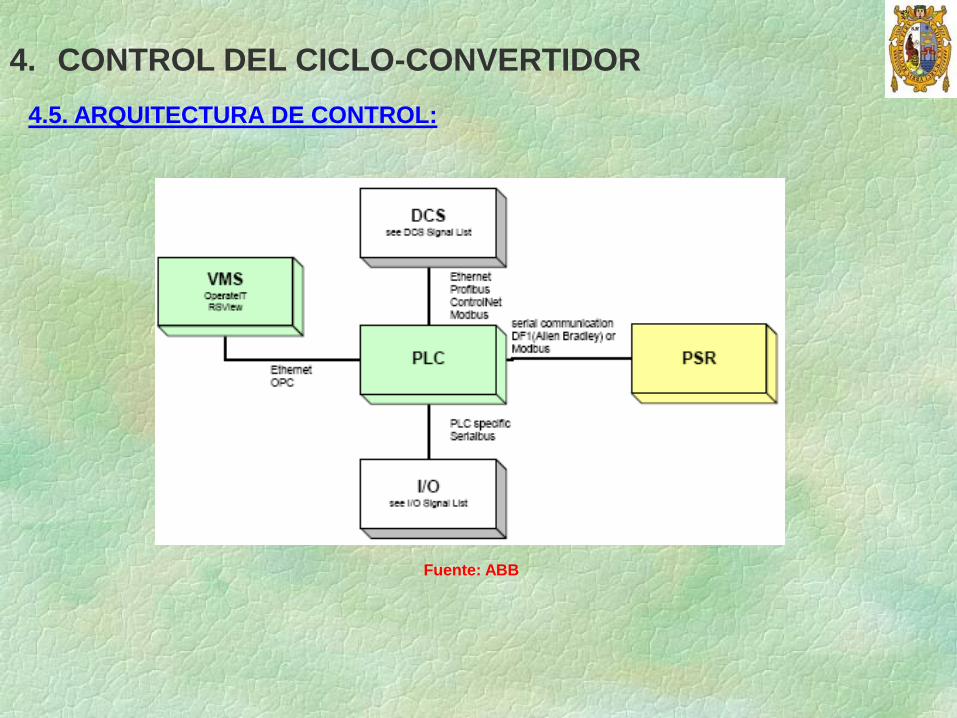
4.5. ARQUITECTURA DE CONTROL:
Fuente: ABB

4. CONTROL DEL CICLO-CONVERTIDOR
4.5. ARQUITECTURA DE CONTROL:
Fuente: ABB

5. ARMÓNICOS Y FILTROS
5. ARMÓNICOS Y FILTROS
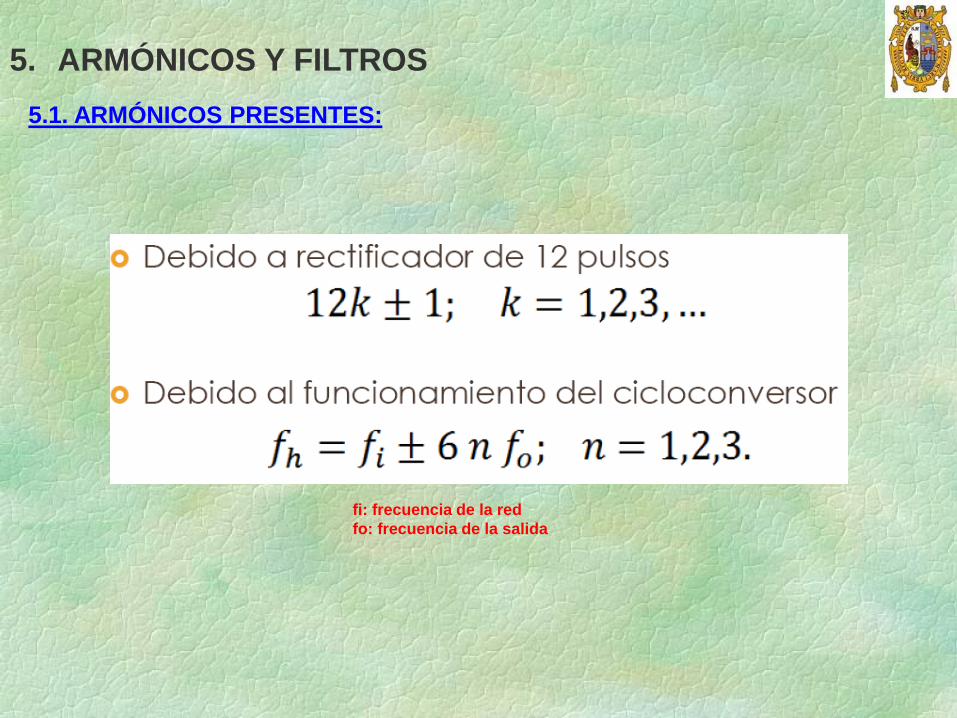
5.1. ARMÓNICOS PRESENTES:
fi: frecuencia de la red
fo: frecuencia de la salida

5. ARMÓNICOS Y FILTROS
5.1. ARMÓNICOS PRESENTES:
• Armónicos de orden decimal.
• Armónicos dependen de la velocidad de rotación del molino.
• Amplitudes de las armónicos son de corrientes considerables.

5. ARMÓNICOS Y FILTROS
5.2. FILTROS:
• Debido a la gran potencia que se maneja se deben ocupar filtros pasivos.
• Filtros sintonizados para la 11°y 13°armónico.
• Un filtro pasa altos para atenuar otras frecuencias.
Banco de filtros para rectificador de 12 pulsos

5. ARMÓNICOS Y FILTROS
5.2. FILTROS:
Filtro para ciclo-convertidor de 12 pulsos de un GMD de 15,000 HP

5. ARMÓNICOS Y FILTROS
5.3. FLUJO DE ARMÓNICOS EN REDES:

5. ARMÓNICOS Y FILTROS
5.3. FLUJO DE ARMÓNICOS EN REDES:

6. CONCLUSIONES

6. CONCLUSIONES
6.1. VENTAJAS DEL GMD ALIMENTADO POR CICLO-CONVERTIDOR:
• Aceleración y desaceleración suaves y controladas.
• Detención suave y controlada, sin oscilación.
• Menos costos por mantención.
• Operación a velocidades menores o superiores a la velocidad nominal.
• No existe golpe de corriente en la partida.
• Protección de carga congelada.
• Utilización de filtros pasivos para obtener un buen factor de potencia.
• Posibilidad de control de armónicas de corriente para cumplir normativa
local.
• Funcionamiento en cuatro cuadrantes.
• Mejora de calidad y eficiencia de proceso de molienda.

TEXTOS:
“Máquinas eléctricas”, 4ª Ed. (Stephen J. Chapman / Mc Graw Hill)
“Electrónica Industrial Moderna”, 5ª Ed. (Maloney, Timothy J. / Prentice-Hall)
“Electrónica de Potencia”, 3ª Ed. (Rashid, Muhammad H. / Prentice-Hall)
“Accionamientos Gearless para Molinos de Alta Potencia”, 1ª Ed.
(Jorge Pontt O. / José Rodríguez P. / Germán Sepúlveda V. / LOM Ediciones Ltda.)
WEBS:
http://www.ccpot.galeon.com
http://www.unicrom.com/
http://www.redeya.com/electronica/semiconductores.html
http://www.dte.uvigo.es/recursos/potencia/dc-ac/
http://www.dte.uvigo.es/recursos/potencia/dc-ac/tiristor.htm
FUENTES DE INFORMACIÓN:

MUCHAS
GRACIAS
Expositor: Ing. Luis Alberto Rojas Tristán
[email protected] / [email protected]
Lima, 29 de Mayo del 2015
UNIVERSIDAD NACIONAL MAYOR DE SAN
MARCOS Facultad de Ingeniería Electrónica y Eléctrica