applying tabu search to backup path planning for multicast networks
TRANSCRIPT

Computers & Operations Research 32 (2005) 2875–2889www.elsevier.com/locate/dsw
Applying tabu search to backup path planning formulticast networks
Chyi-Bao Yang, Ue-Pyng Wen∗
Department of Industrial Engineering and Industrial Management, National Tsing Hua University,Hsinchu, Taiwan, ROC
Abstract
More and more multimedia applications rely on the ability of networks to provide multicast communications.Network survivability becomes a critical issue in network planning, design, and operation to reduce the impactsof failures in high-speed networks. A rapid and cost-e1ective restorable network must be planned to maintainnetwork survivability and use network bandwidth e1ectively. This paper considers the problem of preplanningdelay-constrained backup path for multicast networks to minimize the total cost of all the backup paths. Basedon the path restoration scheme, a tabu search (TS) algorithm is proposed to 5nd a near optimal solution forthe problem under investigation. Diversi5cation and intensi5cation strategies are suggested. The computationalexperiments are conducted to demonstrate the performance of the proposed TS algorithm. The results showthat it o1ers high-quality solutions within a short amount of time.? 2004 Elsevier Ltd. All rights reserved.
Keywords: Tabu search; Network survivability; QoS; Multicast communication
1. Introduction
Network survivability has become a critical issue in network planning, design, and operation due toincreasing societal dependence on communication systems and the growing importance of real-timeinformation. Fast restoration from a failure is a key ingredient in reducing the impacts of failures inhigh-speed network; a self-healing network can automatically restore its functionality in the event ofa failure. Another issue is related the increasing transmission bandwidth of various network services.In other words, bandwidth becomes a competitive and limited resource in a network. Thus, a rapid
∗ Corresponding author. Tel.: +886-3-5742653; fax: +886-3-5722685.E-mail address: [email protected] (U.-P. Wen).
0305-0548/$ - see front matter ? 2004 Elsevier Ltd. All rights reserved.doi:10.1016/j.cor.2004.04.018

2876 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
E
A B C D
Working pathBackup path by path restoration Backup path by link restoration
Failed link
Fig. 1. Di1erence between link restoration and path restoration.
and cost-e1ective self-healing network must be planned to maintain network survivability and usenetwork bandwidth e1ectively.
In a self-healing network, a failed path is automatically switched to a backup path. Two methodsare available to implement a self-healing network: the preplanned method and the dynamic method. Ina preplanned method, backup paths are arranged and stored in advance in a database. In a dynamicmethod, backup paths are established as soon as a network failure occurs. Comparing these twomethods, the preplanned method is faster and more resource-eGcient than the dynamic method [1].
The major techniques used for network restoration can be classi5ed into two categories: linkrestoration and path restoration [2]. In link restoration, all a1ected traGc is rerouted between the endnodes of a failed link when a link failure occurs. On the other hand, in path restoration, a separatecomplete alternative path is established between the source and destination nodes of the originalpath for each path going through the failed link. The basic di1erence between link restoration andpath restoration is illustrated in Fig. 1. The traGc between nodes A and D is originally routed viathe working path A–B–C–D. If link B–C fails, then it will be replaced by the path B–E–C in linkrestoration. As a result the traGc will be rerouted on backup path A–B–E–C–D. In path restoration,traGc will be rerouted on a new alternative path A–E–D established between nodes A and D. Inaddition, path restoration usually leads to less spare capacity than link restoration [3,4].
Multimedia applications, such as videoconferencing, video on demand, and remote collaboration,rely on the ability of the network to provide multicast communications. Multicast communicationdelivers one copy of the multimedia data from a single source node to multiple destination nodesalong a tree instead of sending separate copies to each destination node. A network failure ina conventional point-to-point communication network a1ects the traGc between two end points.However, a network failure in the multicast communication network may disturb all the traGc toa set of destination nodes. Currently, since more and more new multimedia applications demandmulticast communications, the impacts of network failures in multicast networks have become muchmore serious than in conventional point-to-point communications.
Various self-healing algorithms have been proposed for multicast communications. Wang andChang [5] proposed both link- and tree-based dynamic restoration schemes. On the other hand,Wang and Huang [6] proposed two preplanned restoration methods, the point-to-point method andthe closed-node method. The searching process of a search message for building a backup pathwas introduced, but the optimization concept was not involved [5,6]. Wu and Lee [7] modeled the

C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2877
problems of preplanning backup paths of multicast network as a combinatorial optimization problemand proposed eGcient heuristic algorithms to solve it. Their work was extended by Kwong et al. [8]where a genetic algorithm was applied to search the backup paths in a larger space of alternativebackup paths rather than a limited set of predetermined alternative backup paths. Feng and Siew [9]proposed two backup virtual path layout design schemes, namely link- and tree-based schemes, fordesigning restorable paths to eGciently support multicast applications.
Low cost and high Quality-of-Service (QoS) are the two important goals for multicast tree con-struction. Many multicast routing algorithms have been proposed to form the low-cost multicast treesthat satisfy the QoS requirements of the applications [10–15]. The QoS requirements are generallyexpressed in terms of end-to-end delay, delay jitter, and packet loss probability. After the construc-tion of eGcient original multicast trees meeting both low-cost and end-to-end delay requirements, itis essential to consider the requirements of low-cost and end-to-end delay in backup path planning.However, the existing literature on backup path planning in multicast communication has consideredonly cost minimization, but not QoS requirements. Therefore, study of preplanning backup paths thatconsiders both cost minimization and ful5llment of QoS requirements is necessary.
This paper investigates the problem of preplanning QoS quali5ed backup paths for multicastnetworks. We focus on end-to-end delay as the QoS parameter required by the general applicationand total cost as the parameter measuring the eGciency of network resource utilization. It has beenshown that the general problem of 5nding a path with multiple constraints (for example end-to-enddelay and total cost) is NP-complete [16]. Moreover, the problems of minimizing the multicast treecost while bounding the end-to-end delay from the source node to each destination node and ofdetermining backup paths even without considering the QoS requirements are NP-hard [7–9,17,18].Therefore, a tabu search (TS) algorithm for path restoration scheme with the capability to determinethe near-optimal delay-constrained backup paths at minimum total cost in advance has been proposed.
The rest of the paper is organized as follows. Section 2 describes the problem formulation.Section 3 presents the proposed TS algorithm for preplanning the near-optimal backup paths withdelay guarantee. Computational and experimental results are provided in Section 4, and conclusionsand directions for further research are given in Section 5.
2. Problem formulation
Various failure scenarios could be considered in backup path planning. We concentrate on singlelink failure because the probability of two or more simultaneous link failures is almost zero [19].A single link failure causes a path failure from the standpoint of path restoration, since the backuppath must be independent of the working path. Compared with a single link failure, the node failureprobability is small enough to be negligible [19]. Additionally, path restoration usually requiresfewer spare capacities compared to link restoration, while the work performed at the time of failureis considerably simpler with link restoration. The principal advantages of link restoration are speed,ease of implementation, and fault isolation, since an alternative path only has to be established forjust one node pair. In the case of path restoration, the alternative paths must be established separatelyfor every end point pair of each path going through the faulty link. However, path restoration tends tobe more eGcient in terms of network capacity utilization. Thus, this paper adopts the path restorationscheme to preplan delay-constrained backup paths for multicast networks.

2878 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
The problem of preplanning delay-constrained backup paths in the path restoration scheme isformulated as a combinatorial optimization problem. This formulation focuses on minimizing thetotal cost of spare bandwidths in all backup paths for a multicast tree, in which each backup path isconstrained to satisfy the QoS requirements in terms of end-to-end delay. The model of determiningthe backup path without considering QoS requirements proposed by Wu and Lee [7] will be adoptedand further modi5ed here.
A directed graph G = (V; E) is used to represent a communication network where V is the setof network nodes and E denotes the set of links between nodes. A link from node i to node jis represented by (i; j). Each graph contains a single source node vs, where vs ∈V , and a set ofdestination nodes Z , where Z ⊆ V −{vs}, which is called a multicast group. The size of a multicastgroup is denoted by M . A delay-constrained multicast tree T , where T ⊆ G is a tree rooted at vsspanning all of the nodes in Z while satisfying the end-to-end delay bound �d. The original pathfrom the source node to the destination node in the multicast tree is called the working path, denotedas WP. Without passing all the links in the working path, an alternative path established betweenthe source node and the destination node to protect the working path is called as a backup path. Toformulate the problem under investigation, the following notations are used.
Input values:
cij link cost on link (i; j), (i; j) ∈Edij link delay on link (i; j), (i; j) ∈E, including the queuing, transmission, and propagation delayEt the set of links in the multicast tree t�d the end-to-end delay bound related to the paths from the source node to each of the desti-
nation nodesbw bandwidth requirement of the multicast treeP the set of all working paths in the multicast tree
uijk
−1 if the link(i; j) leaves the node k; k ∈V;1 if the link (i; j)enters the node k; k ∈V;0 otherwise;
wkp
−1 if the node k ∈V is a source node of the path p; p∈P;1 if the node k ∈V is a destinatio nnode of the path p; p∈P;0 otherwise;
�ijp
{1 if link (i; j) in the working path p; p∈P;0 otherwise;
�ij
{1 if link (i; j) in the multicast tree;0 otherwise:
Decision variables:
xij
{1 if there is a need to reserve the spare bandwidth on link (i; j)0 otherwise
yijp
{1 if link (i; j) is used to protect path p; p∈P0 otherwise:

C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2879
The problem formulation can then be represented as follows:
Min∑
(i; j)∈Ecijxij
s:t: ∑(i; j)∈E
uijkyijp = wkp; ∀k ∈V; p∈P; (1)
�ijpyijp = 0; ∀p∈P; (i; j) ∈E; (2)
xij¿max{�abp bw(yijp − �ij(1 − �ijp)); 0}; ∀(i; j) ∈E; (a; b) ∈Et; (i; j) �= (a; b); (3)∑(i; j)∈E
yijpdij6�d ; ∀p∈P; (4)
yijp ∈ {0; 1}; ∀(i; j) ∈E; p∈P: (5)
The objective function attempts to minimize the total cost of spare bandwidths in all the backuppaths. Constraints (1) are the routing constraints to route one backup path from the source nodeto the destination node of the original working path for each working path. Constraints (2) ensurethe backup path to be independent of its protected working path. In Constraints (3), �abp bw yijpcalculates the amount of bandwidth rerouted from link (a; b) to link (i; j) to restore the failure oflink (a; b). �abp bw �ij(1−�ijp) is the amount of bandwidth allowed to be shared between the workingpath and backup path. Thus �abp bw �ij(1 − �ijp) is subtracted from �abp bw yijp to determine if thereis a need to reserve the additional spare bandwidth on link (i; j). Constraints (4) guarantee eachbackup path satis5es the requirements of delay bound. Finally, constraints (5) restrict yijp to be 0or 1.
3. The proposed tabu search algorithm
The TS techniques, developed by Glover [20–22], are primarily used to solve combinatorial op-timization problems. The e1ectiveness of TS in tackling many real optimization problems is widelyknown. Examples of successful applications of these techniques include open shop scheduling prob-lems [23], path assignment [24], bandwidth packing [25], and delay-constrained multicast routingproblems [26].
The basic TS scheme can be brieOy described as follows. At 5rst, each feasible solution s has anassociated set of neighborhoods N (s). A neighbor s′ in N (s) can be reached from s by an operationcalled a move. Starting from an initial solution, TS iteratively moves from the current solution s toits best admissible neighbor s∗ in N (s), even if s∗ causes the objective function to deteriorate, until asuperimposed stopping criterion is satis5ed. To avoid cycling, solutions that were recently exploredshould be forbidden or declared tabu for a certain number of iterations. This is accomplished bykeeping the attributes of the forbidden moves in a list, called a tabu list. Whenever a move s→ s∗is made, the attributes associated with the opposite move s∗ → s are added to the end of the tabulist, with the oldest elements of the tabu list being removed.
Additionally, aspiration criterion is an important element of Oexibility in TS. The tabu statusof a move is overridden upon meeting the aspiration criteria. If a current tabu move satis5es the

2880 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
aspiration criteria, its tabu status is canceled and it becomes an admissible move. Further improvingthe performance of TS, intensi5cation strategies seek to reinforce moves that incorporate features ofgood solutions found previously, and diversi5cation strategies, in contrast, seek to drive the searchinto less explored regions. To terminate the procedure, three commonly used stopping criteria are: (1)stop if a 5xed maximum number of consecutive iterations is reached without any further improvementin the best value of the objective function; (2) stop if a closer estimation of the optimal value inthe objective function is achieved; and (3) stop if the total number of iterations performed reacha speci5ed limit. To produce good performance, the implementation of TS must be tailored to suitthe structure of the problem at hand. The structural elements used in the implementation of TS arede5ned in the following subsections.
3.1. Initial solution
In the initial step, the minimum delay paths are constructed using Dijkstra’s shortest path algorithmfrom the source node to each member of the multicast group. These minimum delay paths are setas the initial backup paths for each working path. Thus, the initial solution is the set of all theinitial backup paths. To ensure that the working path and backup path are independent with eachother, the delay of links in the working path is set as in5nite when the corresponding backup pathis constructed. The delay of each backup path is de5ned as the sum of link delays along the path;i.e.,
DBP(m) =∑
(i; j)∈BPmdij; ∀m∈Z; (6)
where BPm represents the backup path for the destination node m and DBP(m) denotes the delay ofBPm. The maximum end-to-end delay of all the initial backup paths is the maximum delay from thesource to any multicast group member; i.e.,
Max DBP = maxm∈Z {DBP(m)}: (7)
Since the backup path must satisfy the requirement of end-to-end delay in this paper, Max DBPmust be less than or equal to the end-to-end delay bound of original multicast tree. In some cases, thedelay bound given by the original multicast tree might be too tight; i.e., it will not be satis5ed evenin the minimum delay backup path. In order to consider the end-to-end delay requirement in backuppath planning and to avoid the existence of no feasible backup path, the negotiation mechanismin [13] is adopted to loose �d before any feasible backup path can be established. Hence, �d isreplaced by Max DBP when Max DBP is greater than the delay bound of the multicast tree. On theother hand, when the original delay bound is too loose, more alternative delay-constrained backuppaths might be available to be evaluated. In such case, we keep �d unchanged.
The cost of each backup path and total cost of all the backup paths are calculated with the capacitysharing concepts proposed by Wu and Lee [27] after constructing all the initial backup paths. In thecapacity sharing concepts, the link cost can be counted only once when the capacity of one link isshared. The cost of each backup path is de5ned as the sum of link costs along the path; i.e.,
CBP(m) =∑
(i; j)∈BPmcijlij; ∀m∈Z; (8)

C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2881
where CBP(m) denotes the cost of BPm and
lij =
{0 if (i; j) ∈BPk; ∀k ∈Z − {m}; or (i; j) ∈WP;1 otherwise:
Then the total cost of all the backup paths, denoted as TC, is calculated as follows:
TC =∑m∈Z
CBP(m): (9)
3.2. Neighborhood solutions and move
A neighborhood structure based on similar ‘delete and add’ operations is used to generate neigh-bors. The size of neighbors is the same as the number of multicast group members. The neighbor-hood solution consists of all the minimum cost paths for each member of a multicast group. WithDijkstra’s shortest path algorithm, the minimum cost paths are constructed from the source node toeach member of the multicast group.
For the destination node m, a neighbor of the current backup path must be produced 5rst togenerate the neighborhood solution. Then, the combination of this neighbor and the other currentbackup paths associated with the other destination nodes is set as the neighborhood solution for thedestination node m. In producing a neighbor of the current backup path for the destination node m,one link, denoted as Ltemp(m), is randomly selected among the links in the current backup path orthe previous neighbor path. The previous neighbor path is the initial backup path when the numberof iterations is 0, while it is the neighbor of the backup path generated at the last iteration when thenumber of iterations is greater than 0. This link is deleted from the path, and the cost of it is set asin5nite. A link tabu list, denoted as L tabu list(m), is associated with each destination node m. Itconsists of all the links having already been forbidden by the previous moves. The link costs of allthe links in L tabu list(m) are set as in5nite to avoid them being used in producing the neighbor.The purpose of forbidding the use of Ltemp(m) and all the links in the L tabu list(m) instead of justLtemp(m) is to enlarge the visited solution space. Additionally, the cost of the links in the workingpath is set as in5nite to force the working path and backup path to be independent. Then, a neighborof the current BPm is produced by establishing a minimum cost path between the source node andthe destination node m. The delay and cost of the neighbor are calculated using Eqs. (6) and (8),respectively. While no backup path for the destination node m can be constructed on the physicaltopology due to the tabu status of links in L tabu list(m), the tabu status of the oldest link in theL tabu list(m) is overridden.
For each destination node, the neighbor of the corresponding current backup path is generated.The neighborhood solution associated with the destination node m is generated by means of replac-ing the current backup path of m with the neighbor and keeping the current backup paths of theother destination nodes unchanged. The total cost of one neighborhood solution associated with thedestination node m, denoted as TC(m), is calculated using Eq. (9). Furthermore, let TC∗ and TC#
represent the total cost of the best solution and that of the current solution, respectively. Finally,neighborhood solutions can be constructed for all members of the multicast group.
Each iteration begins by generating the neighbor for each destination node. To meet the require-ment of end-to-end delay, an extra penalty must be assigned to a neighbor violating the delay
2882 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
bound, so that the neighborhood solution associated with this neighbor will not be selected as amove. Among the neighborhood solutions, the one with the minimum total cost is chosen as thebest move and considered as the new current solution for the next iteration.
3.3. Tabu list and aspiration criterion
After the best move is executed, the elements belonging to the move are recorded in the tabu listto forbid reversal of the recently made move. If TS detects that a neighborhood solution possessesattributes of a previously visited solution within a certain number of iterations, the move is forbiddenand the next neighborhood solution is chosen. However, the tabu status can be overridden by theaspiration criterion if implementing the forbidden move results in better performance.
Two tabu lists, L tabu list(m) and D tabu list, are employed in our approach. If the neighborhoodsolution associated with the destination node m is selected as the best move, Ltemp(m) is recordedin the L tabu list(m) and is forbidden to be used in generating the minimum cost path within thefuture L TL iterations. Hence, L tabu list(m) records all the links having already been forbidden bythe previous moves. The tabu tenure of link in the L tabu list(m) is increased upon increasing theiteration. Once the tabu tenure of link in the L tabu list(m) exceeds L TL, the tabu status of the linkis cancelled and the link is removed from the L tabu list(m). On the other hand, D tabu list recordsthe destination node of the best move. Moreover, if the neighborhood solution associated with thedestination node m is selected as the best move, the destination node m is recorded in D tabu listand is forbidden to be chosen as the best move within the future D TL iterations. The tabu tenureof the destination node in the D tabu list is increased upon increasing the iteration. Once the tabutenure of one destination node in the D tabu list exceeds D TL, the tabu status of the destinationnode is cancelled and the destination node is removed from the D tabu list.
In our approach, the aspiration criterion is used to override the tabu status of the destinationnodes whenever appropriate; that is, a move associated with the destination node recorded in theD tabu list is admissible if implementing the move results in reducing the total cost of all the backuppaths. Therefore, a neighborhood solution with the minimum total cost of all the backup paths canstill be selected as the best move when TC(m) is smaller than TC∗, although the destination nodem associated this neighborhood solution is recorded in the D tabu list.
3.4. Diversi9cation and intensi9cation
Diversi5cation strategies are designed to drive the search into unexplored regions. However, in-tensi5cation strategies encourage move combinations and solution features that are historically foundgood. Accordingly, they may also restart the search in promising regions to search them morethoroughly. Both diversi5cation and intensi5cation strategies are adopted in our approach. Let Di-versify iter be the maximum number of consecutive iterations that the diversi5cation strategy canapply to the search processes. The number of consecutive iterations without decreasing TC is de-noted as Noimprove iter, and it is updated from iteration to iteration. A diversi5cation strategy isadopted in constructing the neighbors whenever Noimprove iter is not greater than Diversify iter,while intensi5cation strategy becomes active whenever Noimprove iter exceeds Diversify iter.
The major di1erence between diversi5cation and intensi5cation strategies is where the Ltemp isselected from. In the diversi5cation strategy, Ltemp(m) is randomly selected among the links in the
C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2883
previous neighbor path for the destination node m, even though the neighborhood solution of thisneighbor path is not the best move. The purpose is to construct more possible new minimum costpaths so as to enlarge the visited regions. On the other hand, in the intensi5cation strategy, Ltemp(m)is randomly selected among the links in the current backup path for the destination node m so as toconstruct a minimum cost path that can potentially decrease TC more completely in the attractiveregions.
At beginning, the diversi5cation strategy is implemented. On each iteration, Noimprove iter is up-dated according to the comparison between TC∗ and TC# after choosing the best move. When TC# issmaller than TC∗, Noimprove iter is updated as 0. Otherwise, Noimprove iter is increased by 1. Thediversi5cation strategy is continuously implemented whenever Noimprove iter is not greater than Di-versify iter. Once Noimprove iter exceeds Diversify iter, the intensi5cation strategy is implementedto generate a neighbor of the current backup path. Accordingly, Noimprove iter is updated fromiteration to iteration according to the comparison between TC∗ and TC#. Both diversi5cation andintensi5cation strategies are implemented in turns based on the relationship between Noimprove iterand Diversify iter.
3.5. Termination rule
TS iterations can be stopped by di1erent stop criteria. We have experimented with di1erent valuesof iterations, denoted as iter, and found that the solution quality depends on the maximum numberof iterations, denoted as Max iter. Hence, a certain number of iterations is chosen as the stoppingcriterion in our approach.
3.6. Tabu search algorithm
A step-by-step description of our heuristic TS algorithm is described in the following.
Step 1: Initialization.1.1. Compute the minimum delay path independent of the working path by Dijkstra’s algorithm,
∀m∈Z . Let the set of minimum delay paths be initial and current backup paths.1.2. Compute DBP(m), ∀m∈Z . Set �d = max{Max DBP, original �d}.1.3. Compute CBP(m), ∀m∈Z ; then compute TC. Set TC∗ = TC# = TC.1.4. Set L tabu list(m) = & ∀m∈Z , D tabu list = &, Noimprove iter = 0, and iter = 0.Step 2: Neighborhood search.
2.1. Select Ltemp(m) randomly among the links in the previous neighbor path if Noimprove iter6Diversify iter; otherwise, select Ltemp(m) randomly among the links in the current backuppath.
2.2. Set the costs of Ltemp(m) and all links in L tabu list(m) to be ∞. Compute the minimumcost path independent of the working path by Dijkstra’s algorithm.
2.3. Compute DBP(m) and CBP(m). If DBP(m)¿�d, then set CBP(m) = CBP(m) + penalty, andcompute TC(m).
2.4. Repeat 2.1–2.3, ∀m∈Z .2.5. Determine the best move according to TC(m), considering the D tabu list and aspiration
criterion.

2884 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
2.6. Update the L tabu list(m), D tabu list, and tabu tenure.2.7. Update TC#. If TC# ¡TC∗, set TC∗ = TC# and Noimprove iter = 0; otherwise,
Noimprove iter =Noimprove iter + 1.Step 3: Termination check.
3.1. Set iter = iter + 1.3.2. If iter6Max iter, go to Step 2; otherwise, stop.
4. Computational experiments
In this section, di1erent sets of problems are generated randomly to evaluate the performance ofthe proposed TS algorithm in a variety of network topologies. The proposed TS algorithm is coded inC and implemented on a Pentium 4-2:4 GHz personal computer with Windows XP operating system.
We adopt the method described in literature [28,29] to generate the random graphs. At 5rst, thegenerator randomly distributes N nodes over a W ×W square coordinate grid, where W is a 5xedinteger number. Let deg be the average degree per node and |E| (=Ndeg=2) be the total number oflinks. The network topology is formed by constructing a cycle using N links, where all the nodesare included to ensure network connectivity. The remaining |E|−N links are added to the networkin arbitrary node pairs. The multicast groups are generated by randomly selecting the source nodeand destination nodes on the graph. The link costs are randomly set from 1 to 10, and these randomlink costs match those typically used in the NSFNET backbone network [30]. It is assumed thatthe link delays are proportional to the distance between the nodes. The given multicast tree is builtaccording to the shortest path tree algorithm in terms of the cost produced from Dijkstra’s algorithm.Delay bound �d of the multicast tree is de5ned as the maximal delay among the end-to-end delaysfor all the working paths in the multicast tree, and might be replaced by Max DBP in the initial stepof the proposed TS algorithm as described in Section 3.1.
The proposed TS algorithm involves some parameters that need to be determined appropriately.Preliminary experiments were performed to 5nd the best values of each parameter based on theexperimental results. As a result, the following parameter values are used in the proposed TS algo-rithm: L TL= 24, Diversify iter= 100, D TL= 7 when M is greater than 10, and D TL=M=2 whenM is less than 10.
In order to evaluate the performance of the proposed TS algorithm, networks with 30, 40, and 50nodes were considered. For each node number, the sizes of multicast group were 20%, 40%, and60% of the nodes, respectively. Ten test problems were randomly generated and solved for eachnetwork topology with di1erent multicast group sizes, which resulted in a total of 90 test problems.Three di1erent Max iter value, 3000, 100N , and 200N , are set as stop criteria in this test. Wecompare the solutions of TS with the optimal solutions obtained by running the LINGO package.For those problems that could not be solved optimally by the LINGO package within a time limitof 3600 s, the lower bounds were used in the comparison.
Among the test problems, when the multicast group size is 60% of N , one, 5ve, and seven outof 10 problems failed to 5nd the optimal solution within the time limit for the case of N = 30, 40,and 50, respectively. The results are summarized in Table 1. The percentage deviation is de5ned as100(ZTS − OPT )=OPT , where OPT is the optimal solution (or the lower bound) value obtained bythe LINGO package and ZTS is the best solution value obtained by the proposed TS algorithm.
C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2885
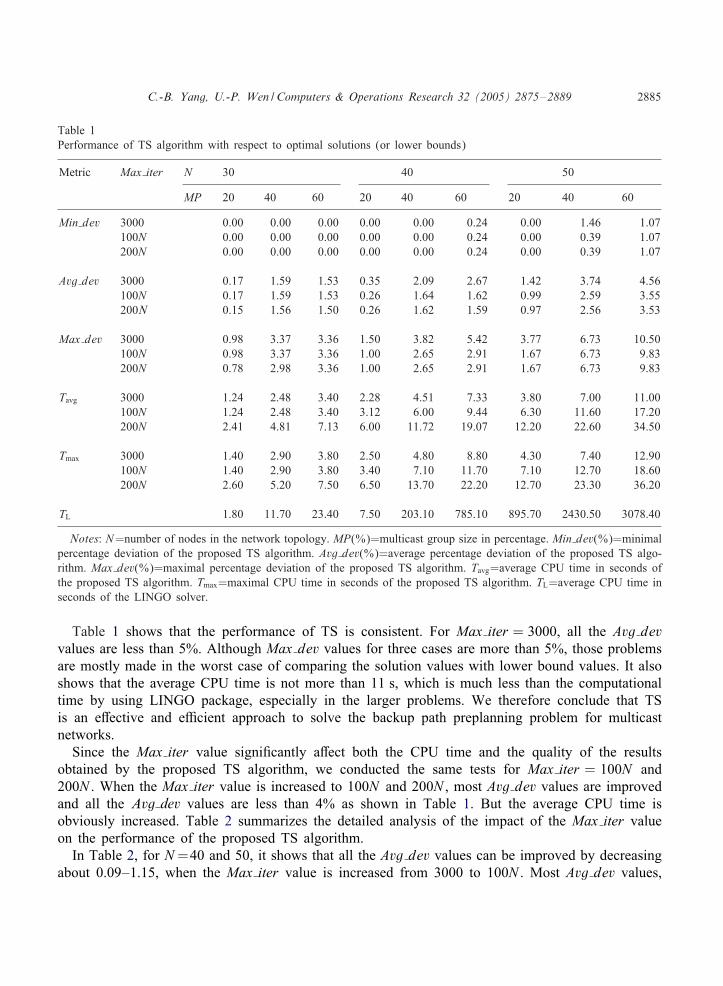
Table 1Performance of TS algorithm with respect to optimal solutions (or lower bounds)
Metric Max iter N 30 40 50
MP 20 40 60 20 40 60 20 40 60
Min dev 3000 0.00 0.00 0.00 0.00 0.00 0.24 0.00 1.46 1.07100N 0.00 0.00 0.00 0.00 0.00 0.24 0.00 0.39 1.07200N 0.00 0.00 0.00 0.00 0.00 0.24 0.00 0.39 1.07
Avg dev 3000 0.17 1.59 1.53 0.35 2.09 2.67 1.42 3.74 4.56100N 0.17 1.59 1.53 0.26 1.64 1.62 0.99 2.59 3.55200N 0.15 1.56 1.50 0.26 1.62 1.59 0.97 2.56 3.53
Max dev 3000 0.98 3.37 3.36 1.50 3.82 5.42 3.77 6.73 10.50100N 0.98 3.37 3.36 1.00 2.65 2.91 1.67 6.73 9.83200N 0.78 2.98 3.36 1.00 2.65 2.91 1.67 6.73 9.83
Tavg 3000 1.24 2.48 3.40 2.28 4.51 7.33 3.80 7.00 11.00100N 1.24 2.48 3.40 3.12 6.00 9.44 6.30 11.60 17.20200N 2.41 4.81 7.13 6.00 11.72 19.07 12.20 22.60 34.50
Tmax 3000 1.40 2.90 3.80 2.50 4.80 8.80 4.30 7.40 12.90100N 1.40 2.90 3.80 3.40 7.10 11.70 7.10 12.70 18.60200N 2.60 5.20 7.50 6.50 13.70 22.20 12.70 23.30 36.20
TL 1.80 11.70 23.40 7.50 203.10 785.10 895.70 2430.50 3078.40
Notes: N=number of nodes in the network topology. MP(%)=multicast group size in percentage. Min dev(%)=minimalpercentage deviation of the proposed TS algorithm. Avg dev(%)=average percentage deviation of the proposed TS algo-rithm. Max dev(%)=maximal percentage deviation of the proposed TS algorithm. Tavg=average CPU time in seconds ofthe proposed TS algorithm. Tmax=maximal CPU time in seconds of the proposed TS algorithm. TL=average CPU time inseconds of the LINGO solver.
Table 1 shows that the performance of TS is consistent. For Max iter = 3000, all the Avg devvalues are less than 5%. Although Max dev values for three cases are more than 5%, those problemsare mostly made in the worst case of comparing the solution values with lower bound values. It alsoshows that the average CPU time is not more than 11 s, which is much less than the computationaltime by using LINGO package, especially in the larger problems. We therefore conclude that TSis an e1ective and eGcient approach to solve the backup path preplanning problem for multicastnetworks.
Since the Max iter value signi5cantly a1ect both the CPU time and the quality of the resultsobtained by the proposed TS algorithm, we conducted the same tests for Max iter = 100N and200N . When the Max iter value is increased to 100N and 200N , most Avg dev values are improvedand all the Avg dev values are less than 4% as shown in Table 1. But the average CPU time isobviously increased. Table 2 summarizes the detailed analysis of the impact of the Max iter valueon the performance of the proposed TS algorithm.
In Table 2, for N=40 and 50, it shows that all the Avg dev values can be improved by decreasingabout 0.09–1.15, when the Max iter value is increased from 3000 to 100N . Most Avg dev values,

2886 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
Table 2Performance analysis of TS algorithm for di1erent Max iter value
N MP DAvg dev DT
100N 200N Gap 100N 200N Gap
30 20 0.00 0.02 0.02 0.00 1.17 1.1740 0.00 0.03 0.03 0.00 2.33 2.3360 0.00 0.03 0.03 0.00 3.63 3.63
40 20 0.09 0.09 0.00 0.84 3.72 2.8840 0.45 0.47 0.02 1.49 7.21 5.7260 1.05 1.08 0.03 2.11 11.74 9.63
50 20 0.43 0.45 0.02 2.50 8.40 5.9040 1.15 1.18 0.03 4.60 15.60 11.0060 1.01 1.03 0.02 6.20 23.50 17.30
Notes: DAvg dev=di1erence of the Avg dev value compared to the Avg dev value for Max iter = 3000. DT=di1erenceof the Tavg value compared to the Tavg value for Max iter = 3000. Gap=the DAvg dev (or DT ) value of Max iter = 200Nminus that of Max iter = 100N .
except for the case of N = 40, MP = 20, can be further decreased upon increasing the Max iterfrom 3000 to 200N . In terms of the improvement in the Avg dev values from Max iter = 100N toMax iter = 200N , the results show that only a little improvement (at most 0.03) can be obtained.However, much more CPU times are required to improve a little gain of the Avg dev values, whenthe Max iter value is increased from 100N to 200N . We therefore set Max iter= 100N for the restof the tests.
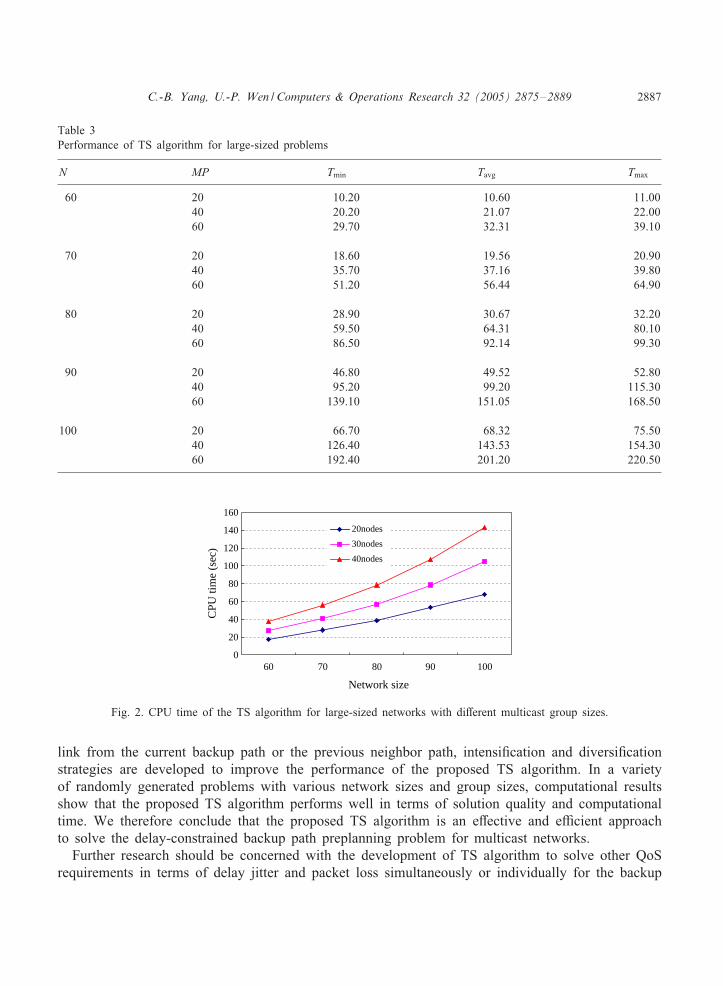
To extend the proposed TS algorithm to even more complicated cases, we further tested the caseswith N equal to 60, 70, 80, 90, and 100, in which the size of multicast groups were 20%, 40%,and 60% of the nodes, respectively. Similarly, 10 test problems were randomly generated and solvedfor each network topology with di1erent multicast group sizes, which resulted in a total of 150 testproblems. Table 3 presents the results. It shows that the computational time does not grow rapidlyas problems become more complicated. The largest case has a network topology of 100 nodes andmulticast group size of 60 nodes, resulting in an average computational time of 201:2 s with amaximum computational time of 220:5 s. In addition, Fig. 2 shows that CPU time grows almostlinearly with network size for the three di1erent multicast group sizes. Therefore, with this linearincrease in computational time with respect to increased problem size, the proposed TS algorithmreliably and eGciently solves large-sized problems.
5. Conclusions
In this paper, we investigate the problem of preplanning a delay-constrained backup path for amulticast tree to minimize the total cost of all backup paths. Based on a path restoration scheme, aTS algorithm is proposed to determine the optimal or near optimal backup paths while satisfying therequirements of end-to-end delay for all members of the multicast group. By deleting the selected
C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2887
Table 3Performance of TS algorithm for large-sized problems
N MP Tmin Tavg Tmax
60 20 10.20 10.60 11.0040 20.20 21.07 22.0060 29.70 32.31 39.10
70 20 18.60 19.56 20.9040 35.70 37.16 39.8060 51.20 56.44 64.90
80 20 28.90 30.67 32.2040 59.50 64.31 80.1060 86.50 92.14 99.30
90 20 46.80 49.52 52.8040 95.20 99.20 115.3060 139.10 151.05 168.50
100 20 66.70 68.32 75.5040 126.40 143.53 154.3060 192.40 201.20 220.50
0
20
40
60
80
100
120
140
160
60 70 80 90 100
Network size
CPU
tim
e (s
ec)
20nodes
30nodes
40nodes
Fig. 2. CPU time of the TS algorithm for large-sized networks with di1erent multicast group sizes.
link from the current backup path or the previous neighbor path, intensi5cation and diversi5cationstrategies are developed to improve the performance of the proposed TS algorithm. In a varietyof randomly generated problems with various network sizes and group sizes, computational resultsshow that the proposed TS algorithm performs well in terms of solution quality and computationaltime. We therefore conclude that the proposed TS algorithm is an e1ective and eGcient approachto solve the delay-constrained backup path preplanning problem for multicast networks.
Further research should be concerned with the development of TS algorithm to solve other QoSrequirements in terms of delay jitter and packet loss simultaneously or individually for the backup

2888 C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889
path preplanning problem in multicast networks. Moreover, the backup path planning problem forthe group multicast networks also deserves further investigation.
Acknowledgements
We thank the National Science Council of the Republic of China (grant NSC 92-2213-E007-062)for supporting this research, and the anonymous referees for their helpful comments and suggestions.
References
[1] Lee H, Chung J, Chung SJ. A state-dependent preplanned ATM VP restoration scheme. IEEE INFOCOM’98, 1998.p. 1766-71.
[2] Anderson J, Doshi BT, Dravida S, Harsha–Vardhana P. Fast restoration of ATM networks. IEEE Journal on SelectedAreas in Communications 1994;12(1):128–38.
[3] Xiong Y, Mason L. Restoration strategies and spare capacity requirements in self-healing ATM networks. IEEE/ACMTransactions on Networking 1999;7:98–110.
[4] Kawamura R, Sato K, Tokizawa I. Self-healing ATM networks based on virtual path concept. IEEE Journal onSelected Areas in Communications 1994;12(1):120–7.
[5] Wang YF, Chang RF. Self-healing on ATM multicast tree. IEIEC Transactions on Communications1998;E81-B(8):1590–8.
[6] Wang YF, Huang JF. Preplanned restoration and optimal capacity placement on ATM multicast tree. IEIECTransactions on Communications 2000;E83-B(10):281–92.
[7] Wu CS, Lee SW. Backup VP planning for multicast connections in ATM networks. Computer Communications1999;22(10):898–906.
[8] Kwong S, Lam DWF, Tang KS, Man KF. Optimization of spare capacity in self-healing multicast ATM networkusing genetic algorithm. IEEE Transactions on Industrial Electronics 2000;47(6):1334–43.
[9] Feng G, Siew CK. Restorable VP-layout design in ATM networks for eGcient support for multicast traGc. IEEProceedings—Communications 2001;148(5):290–300.
[10] Rouskas GN, Baldine I. Multicast routing with end-to-end delay and delay variation constraints. IEEE Journal onSelected Areas in Communications 1997;15(3):346–56.
[11] Sheu PR, Chen ST. A fast and eGcient heuristic algorithm for the delay- and delay variation-bounded multicast treeproblem. Computer Communications 2002;25(8):825–33.
[12] Bettahar H, Bouabdallah A. A new approach for delay-constrained routing. Computer Communications2002;25(18):1751–64.
[13] Zhu Q, Parsa M, Garcia–Luna–Aceves J. A source-based algorithm for delay-constrained minimum-cost multicasting.Proceedings of IEEE INFOCOM’95, 1995. p. 377–85.
[14] Asaka T, Miyoshi T, Tanaka Y. Label algorithm for delay-constrained dynamic multicast routing. IEICE Transactionson Communications 2001;E84-B(1):55–62.
[15] Wang Z, Shi B, Zhao E. Bandwidth-delay-constrained least-cost multicast routing based on heuristic geneticalgorithm. Computer Communications 2001;24(7–8):685–92.
[16] Wang Z, Crowcroft J. Quality-of-Service routing for supporting multimedia applications. IEEE Journal on SelectedAreas in Communications 1996;14(7):1228–34.
[17] Novak R, Rugelj J, Kandus G. A note on distributed multicast routing in point-to-point networks. Computers andOperations Research 2001;28(12):1149–64.
[18] Taw5g A, Taieb Z. Delay-constrained, low-cost multicast routing in multimedia networks. Journal of Parallel andDistributed Computing 2001;61:1307–36.
[19] Roohy LE, Abdou E, Hopkins J, Wagner MA. A procedure for designing a low connected survivable 5ber network.IEEE Journal on Selected Areas in Communications 1986;4(7):1112–7.

C.-B. Yang, U.-P. Wen /Computers & Operations Research 32 (2005) 2875–2889 2889
[20] Glover F. Future paths for integer programming and linkage to arti5cial intelligence. Computers and OperationsResearch 1986;13:533–49.
[21] Glover F. Tabu search—part I. ORSA Journal on Computing 1989;1:190–206.[22] Glover F. Tabu search—part II. ORSA Journal on Computing 1990;2:4–32.[23] Liaw CF. An eGcient tabu search approach for the two-machine preemptive open shop scheduling problem.
Computers and Operations Research 2003;30(14):2081–95.[24] Anderson CA, Fraughnaugh K, Parker M, Ryan J. Path assignment for call routing: an application of tabu search.
Annals of Operations Research 1993;41:301–12.[25] Laguna M, Glover F. Bandwidth packing: a tabu search approach. Management Science 1993;39(4):492–500.[26] Youssef H, Al–Mulhem A, Sait SM, Tahir MA. QoS-driven multicast tree generation using tabu search. Computer
Communications 2002;25(11–12):1140–9.[27] Wu CS, Lee SW, Hou YT. Backup VP preplanning strategies for survivable multicast ATM networks. Proceedings
of IEEE ICC’97, 1997. p. 267–71.[28] Shyur CC, Lu TC, Wen UP. Applying tabu search to spare capacity planning for network restoration. Computers
and Operations Research 1999;26(12):1175–94.[29] Waxman BM. Routing of multipoint connections. IEEE Journal on Selected Areas in Communications 1988;6(9):
128–38.[30] Kompella VP, Pasquale JC, Polyzos GC. Multicast routing for multimedia communication. IEEE/ACM Transactions
on Networking 1993;1(3):286–92.