uzaktan kontrollÜ bahÇe sulama sİstemİ · 2014-11-22 · kontrol edilebilmekteyiz yani...
TRANSCRIPT
T.C. KARADENİZTEKNİKÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
UZAKTAN KONTROLLÜ BAHÇE SULAMA SİSTEMİ
BİTİRME PROJESİ
228440 Gökhan Galip ERGÜN 228456 Halil AKYOL 228465 Ebru YAVUZ
228408 Ali Rıza ÖZKAN
Danışman Doç. Dr. Salim KAHVECİ
Haziran, 2014 TRABZON


T.C. KARADENİZTEKNİKÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
UZAKTAN KONTROLLÜ BAHÇE SULAMA SİSTEMİ
BİTİRME PROJESİ
228440 Gökhan Galip ERGÜN 228456 Halil AKYOL 228465 Ebru YAVUZ
228408 Ali Rıza ÖZKAN
Danışman Doç. Dr. Salim KAHVECİ
Haziran, 2014 TRABZON
LİSANS BİTİRME PROJESİ ONAY FORMU
228440 Gökhan Galip ERGÜN, 228456 Halil AKYOL, 228465 Ebru Yavuz, 228408
Ali Rıza ÖZKAN tarafından DOÇ. DR. Salim KAHVECİ yönetiminde hazırlanan
“UZAKTAN KONTROLLÜ BAHÇE SULAMA SİSTEMİ.” başlıklı lisans bitirme
projesi tarafımızdan incelenmiş, kapsamı ve niteliği açısından bir Lisans Bitirme Projesi
olarak kabul edilmiştir.
Danışman : Doç.Dr.Salim KAHVECİ ………………………………
Jüri Üyesi 1 : Yrd. Doç. Dr. Adnan CORA ………………………………
Jüri Üyesi 2 : Yrd. Doç. Dr. Yusuf SEVİM ………………………………
Bölüm Başkanı : Prof. Dr. İ. Hakkı ALTAŞ ………………………………

III
ÖNSÖZ
Bu bitirme projesi çalışması Karadeniz Teknik Üniversitesi, Mühendislik Fakültesi,
Elektrik-Elektronik Mühendisliği Lisans Programı’nda yapılmıştır.
Bu çalışma Arduino kartıyla kontrolü sağlanabilen damla sulamaya sahip bahçe
otomasyonunu hedef almaktadır.
Bu kılavuzun ilk taslaklarının hazırlanmasında emeği geçenlere, kılavuzun son halini
almasında yol gösterici olan kıymetli hocam Sayın Salim KAHVECİ ‘ye şükranlarımızı
sunmak istiyoruz. Bu çalışmayı destekleyen Karadeniz Teknik Üniversitesi
Rektörlüğü’ne Mühendislik Fakültesi Dekanlığına ve Elektrik-Elektronik Mühendisliği
Bölüm Başkanlığına içten teşekkür eder. Ayrıca bizden yardımlarını esirgemeyen
değerli arkadaşımız Ferhat DALGIÇ ‘a teşekkürlerimizi sunarız.
Her şeyden öte, eğitimim süresince bize her konuda tam destek veren ailemize ve bize
hayatlarıyla örnek olan tüm hocalarımıza saygı ve sevgilerimizi sunarız.
Haziran, 2014
Gökhan Galip ERGÜN
Halil AKYOL
Ebru YAVUZ
Ali Rıza ÖZKAN

IV
İÇİNDEKİLER
Sayfa No
LİSANS BİTİRME PROJESİ ONAY FORMU ............................................................ II
ÖNSÖZ .................................................................................................................. III
İÇİNDEKİLER ...................................................................................................... IV
ÖZET ..................................................................................................................... VI
ŞEKİLLER DİZİNİ .................................................................................................. VII
ÇİZELGELER DİZİNİ ............................................................................................ VIII
SEMBOLLER VE KISALTMALAR ......................................................................... IX
1.GİRİŞ ....................................................................................................................1
1.1.Sistemin Genel Yapısı.........................................................................................1
1.2 Literatür Taraması ..............................................................................................3
2.TEORİK ALTYAPI ...............................................................................................4
2.1.Kablosuz Haberleşme .........................................................................................4
2.1.1. Zigbee .............................................................................................................4
2.1.2. IEEE 802.15.4 Standardı .................................................................................5
2.1.3. Zigbee Protokollerinin IEEE 802.15.4 İle İlişkisi ...........................................6
2.1.4. Zigbee’ nin Ağ Yapısı ve Fiziksel Tabaka……………...……………..............7
2.1.5. XBee Modül Stilleri .......................................................................................7
2.1.6. XBee Bacak Bağıntısı .....................................................................................8
2.1.7. Zigbee Ağ Topolojileri. ...................................................................................8
2.1.8. Zigbee ‘nin Kullanım Alanları ........................................................................9
2.1.9. Zigbee’nin diğer Kablosuz Teknolojilerle Karşılaştırılma................................9
2.2. Arduino ………………………………………………………………………. ....9
2.2.1.Arduino Çeşitlerinin Genel Özellikleri ve Aralarındaki Farklar ...................... 10
2.2.2. Arduino Uno ................................................................................................. 12
2.2.3. Arduino Xbee Bağlantı ................................................................................. 13
2.2.4. Neden Arduino? ............................................................................................ 14
2.3. Sensör……………………………………………………………………….... .. 15
2.3.1. Sensörler İle İlgili Temel Kavramlar ............................................................. 15
2.3.2. Toprağın Nemini Ölçen Sensör Çeşitleri ....................................................... 16
2.3.3. Toprak Nem Sensörü .................................................................................... 16
2.4. Selenoid Vana .................................................................................................. 17

V
3. YAPILAN ÇALIŞMALAR ..................................................................................... 18
3.1. Xbee Konfigürasyonu Çalışması……………………………………………. .... 18
3.1.1. Sistemin Konfigürasyonu……………………………………………... .......... 21
3.1.2. X-CTU Arduino Haberleşme Çalışması………………………………. ......... 23
3.2. Bahçe Sulama Devresi Yapısı .......................................................................... 24
3.2.1. Bahçe Sulama Devresi Akış Diyagramı ......................................................... 26
3.3. Bahçe Damlama Sulama Sisteminin Oluşturulması ...................................... …27
4. DENEYSEL ÇALIŞMALAR .................................................................................. 28
4.1. Toprak Nem Sensörünün Çalışması ................................................................. 28
4.2. Bahçe Sulama Devresinin Laboratuar Ortamında Gerçekleştirilmesi ................ 30
5. SONUÇLAR ....................................................................................................... 32
6. YORUMLAR VE DEĞERLENDİRME .................................................................. 34
KAYNAKLAR ....................................................................................................... 35
EKLER .................................................................................................................. 37
EK-1 IEEE Etik Kuralları .......................................................................................... 37
EK-2 Disiplinler Arası Çalışma ................................................................................... 41
EK-3 Zigbee’nin Bazı Kablosuz Teknolojilerle Karşılaştırılması ................................. 42
EK-4 Kontrol Devresi İçin Kaynak Kodları ................................................................. 43
EK-5 Bahçe Sulama Sistemi Projesi için Maliyet Analizi ............................................ 45
EK-6 Çalışma Takvimi ............................................................................................... 46
EK-7 Standartlar ve Kısıtlar Formu ............................................................................. 47
ÖZGEÇMİŞLER ....................................................................................................... 49

VI
ÖZET
Günümüzde kablosuz ağlarda ki teknolojik gelişmeler birçok alanda olduğu gibi
tarımsal alanda da etkisini göstermiştir. Tarımda, artan talep ihtiyacını karşılamak
amacıyla üretimi sağlıklı bir biçimde yapmak ve kolaylaştırmak için kablosuz ağlardan
yararlanma yoluna gidilmiştir. Bu projede tarımda önemli bir nokta haline gelmiş olan
sulama faaliyetleri, teknolojiyle desteklenerek akıllı bir sistem tasarlanmıştır.
Bu çalışmamızda, bahçeye yerleştirilmiş toprak nem sensörü üzerinden alınan veriler
Ardunio Uno denetleyicisi ile işlenir, işlenen bu verilere göre sulamaya ihtiyaç
duyulduğu anda selenoid su valfi otomatik olarak çalışmakta ve topraktaki bitki ihtiyacı
olan suyu karşılamaktadır. Toprak gerekli su ihtiyacını karşıladığında ise selenoid su
valfi otomatik olarak kapanmaktadır. Ayrıca Arduino Uno denetleyicisinde işlenen
veriler kablosuz ağ modülleri üzerinden bilgisayarda oluşturulan ara yüze
aktarılmaktadır. Ara yüzde görülebilinen bu verilere göre sulama uzaktan bilgisayar ile
de istenildiği zaman kontrol edilmektedir.
Bu proje ile su kaynaklarının optimum kullanılması, güç tasarrufunun maximum
sağlanması, doğru zamanda doğru miktarda sulamayla aşırı ve gereksiz sulama
problemlerinin ortadan kaldırılması amaçlanmıştır.

VII
ŞEKİLLER DİZİNİ
Sayfa No
Şekil 1. Kontrol Ünitesi 1 Şekil 2. Kontrol Devresi 2
Şekil 3. Uzaktan bilgisayar ile kontrollü sulama sisteminin genel blok şeması 3 Şekil 4. Zigbeeprokolü ile IEEE 802.15.4 standardı arasındaki bağlantı diyagramı 6
Şekil 5. Xbee pro modülü 7 Şekil 6. Xbee’ nin pin bağlantıları 8
Şekil 7. Sistemde kullanılan Arduino Uno denetleyicisi 9 Şekil 8. Arduino Uno kartı pin gösterimi 12
Şekil 9. Arduino Xbee pin bağlantısı 13 Şekil 10. Xbee, Arduino ve Xbee Shield Pro Modülü 14
Şekil 11. Toprak nemini ölçme sensörü 16 Şekil 12. Selenoid Vana 17
Şekil 13. X-CTU açılış penceresi ve X-CTU query modem penceresi 19 Şekil 14. X-CTU Range test bölümü 20
Şekil 15. Koordinatör yapılandırma ayarları 22 Şekil 16. Son aygıt yapılandırma ayarları 23
Şekil 17. X-CTU Arduino haberleşme penceresi 24 Şekil 18. Bahçe sulama devresi 25
Şekil 19. Bahçe sulama baskı devresi 25 Şekil 20. Akış diyagramı 26
Şekil 21. Sistem için damlama sulama su borusu ve damlatıcıları 27 Şekil 22. Toprak nem değeri ölçüm düzeneği 28
Şekil 23. Seri monitöründe incelenen kuru toprağın verileri 29 Şekil 24. Seri monitöründe incelenen suya doymuş toprağın verileri 29
Şekil 25. Bahçe sulama devresi gösterimi 31
Şekil 26. Bahçe sulama uygulaması 33

VIII
ÇİZELGELER DİZİNİ
Sayfa No
Çizelge 1. Arduino çeşitlerinin özellikleri 11
Çizelge 2. Bahçe Sulama Sistemi simülasyon çalışması 26 Çizelge 3. Toprak nem sensörü verileri 30
Çizelge 4. Bahçe sulama devresinin laboratuar ortamındaki sonuçları 31

IX
SEMBOLLER VE KISALTMALAR
IEEE : Elektrik Elektronik Mühendisleri Enstitüsü
ISM : Endüstriyel Bilimi Bandı
CSMA : Taşıyıcıyı Dinleyen Çoklu Erişim
MAC : Ortam Erişim Katmanı
PHY : Fiziksel Katman
RFD : İndirgenmiş Fonksiyonlu Cihazlar
FFD : Tam Fonksiyonlu Cihazlar
APL : Zigbee Uygulama Katmanı
NWK : Zigbee Ağ Katmanı
PAN : Zigbee Kişisel Ağ Alanı
ZTC : Zigbee Güvenlik Merkezi
BPSK : İkili Faz Kaydırmalı Anahtarlama
ZC : Zigbee Koordinatörü
ZR : Zigbee Yönlendiricisi
ZED :Zigbee Son Aygıt
QPSK : Dört Faz Kaydırmalı Anahtarlama
IDE : Entegre Geliştirme Ortamı
PWM : Darbe Genişliği Modülasyonu
EEPROM : Elektronik Silinebilir Programlanabilir Salt Okunur Bellek
USB : Evrensel Veri Yolu
UART : Evrensel Asenkron Alıcı Verici
ADC : Analog Sayısal Dönüştürücü
SRAM : Durağan Rastgele Erişimli Bellek
GND : Toprak
RF : Radio Frekansı

X
C : Koordinatör
R : Yönlendirici
E : Son Aygıt
V : Volt
mSS : Basınç
1
1. GİRİŞ
Teknolojinin gelişmesiyle birlikte otomasyon sistemlerinin insan yaşamı üzerindeki
kolaylaştırıcı etkisi gün geçtikçe artmaktadır. Tarım alanındaki teknolojik iyileşmeler de
bu kolaylaştırıcı etkilerin en önemlilerindendir. Çünkü tarım insan yaşamında önemli
bir üretimdir. Bu üretimde de sulama baş sıradadır.Yetişen ürünün sağlıklı olabilmesi ve
tasarruflu bir sulama için homojen bir sulama gerekir. Bu homojen sulama, kontrol
elemanları ile insan gücü olmadan kolaylıkla yapılabilinir. Bu çalışmada uzaktan
kontrollü sulama sistemi tasarlanmıştır ve bu sistemin genel yapısı gösterilerek, sistem
elemanları anlatılmış ve daha sonra sistem portatif olarak oluşturulmuştur.
1.1. Sistemin Genel Yapısı
Uzaktan kontrol için projemiz iki ana bölümden oluşmaktadır. Bu bölümler
şunlardır:
1) Bu kısım da sulama sistemini kontrol etmek için kullanıcı ara yüzünün kurulu
olduğu bir bilgisayar vardır. Şekil 1 ‘de gösterilen bu sistem kontrol ünitesidir.
Bu kontrol ünitesinde ki bilgisayar haberleşme için modem donanımına sahiptir.
Şekil 1. Kontrol Ünitesi

2
2) Bu kısım, toprak nem sensörü ile ArduinoUno mikro denetleyicisinin bulunduğu
kontrol devresinden, haberleşme için de bir modemden oluşmaktadır. Ayrıca
sulama sisteminin çalışması için de su vanası görevinde olan selenoid vanadan
oluşmaktadır. Sistem için oluşturduğumuz kontrol devresinin blok şeması Şekil 2
‘de gösterilmiştir.
Şekil 2. Kontrol Devresi
Projemizi bir bütün olarak düşündüğümüzde sistem şu şekilde gerçekleşmektedir;
bahçedeki toprağın nem değeri nem sensörü tarafından alınır. Sensörlerden gelen
değerler Arduino Uno kontrol kartında işlenir ve bu değerler karşılaştırılır. Kontrol
kartında karşılaştırılan sensör verilerine göre toprak nem değeri bitki nem değerinden
düşük ise su vanası otomatik olarak açılır. Toprak ile bitki nem değeri dengelendiğinde
ise su vanası otomatik olarakkapanır.Aynı zamanda toprak nem değeri belirli aralıklarla
Zigbee modem aracılığı ile bilgisayarımızda bulunan kullanıcı ara yüzüne gelmektedir.
Ara yüzde gördüğümüz bu değerlere göre sistemi bilgisayardan istediğimiz zaman
kontrol edilebilmekteyiz yani sistemimiz hem manüel hem de otomatik olarak
çalışmaktadır.
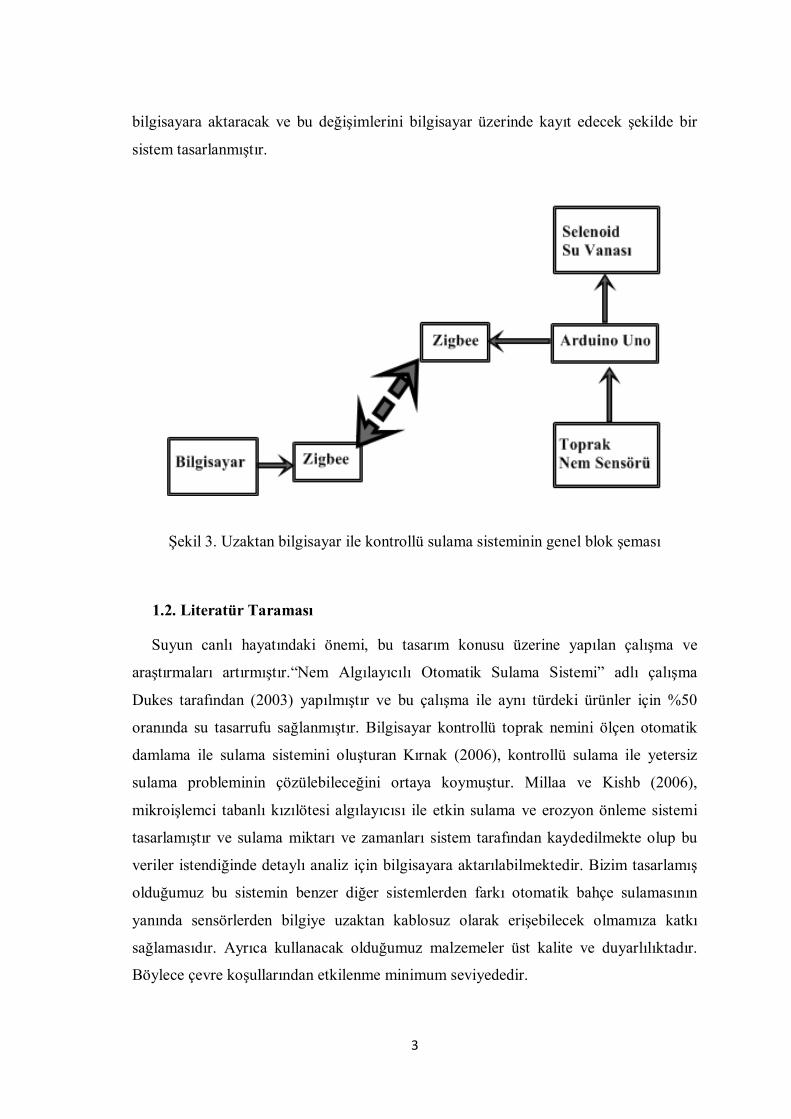
Yapılan ve Şekil 3 ‘de gösterilen bu çalışmada uzaktan bilgisayar destekli nem
kontrol uygulaması geliştirilmiştir. Devrede sensör olarak toprak nem sensörü, kontrol
amacıyla ise Arduino Uno denetleyicisi kullanılmıştır. Devre üzerindeki sensörlerin
bağlantıları bahçede bulunmaktadır. Bu bağıntılar yardımı ile topraktaki nem verisini
3
bilgisayara aktaracak ve bu değişimlerini bilgisayar üzerinde kayıt edecek şekilde bir
sistem tasarlanmıştır.
Şekil 3. Uzaktan bilgisayar ile kontrollü sulama sisteminin genel blok şeması
1.2. Literatür Taraması
Suyun canlı hayatındaki önemi, bu tasarım konusu üzerine yapılan çalışma ve
araştırmaları artırmıştır.“Nem Algılayıcılı Otomatik Sulama Sistemi” adlı çalışma
Dukes tarafından (2003) yapılmıştır ve bu çalışma ile aynı türdeki ürünler için %50
oranında su tasarrufu sağlanmıştır. Bilgisayar kontrollü toprak nemini ölçen otomatik
damlama ile sulama sistemini oluşturan Kırnak (2006), kontrollü sulama ile yetersiz
sulama probleminin çözülebileceğini ortaya koymuştur. Millaa ve Kishb (2006),
mikroişlemci tabanlı kızılötesi algılayıcısı ile etkin sulama ve erozyon önleme sistemi
tasarlamıştır ve sulama miktarı ve zamanları sistem tarafından kaydedilmekte olup bu
veriler istendiğinde detaylı analiz için bilgisayara aktarılabilmektedir. Bizim tasarlamış
olduğumuz bu sistemin benzer diğer sistemlerden farkı otomatik bahçe sulamasının
yanında sensörlerden bilgiye uzaktan kablosuz olarak erişebilecek olmamıza katkı
sağlamasıdır. Ayrıca kullanacak olduğumuz malzemeler üst kalite ve duyarlılıktadır.
Böylece çevre koşullarından etkilenme minimum seviyededir.

4
2. TEORİK ALTYAPI
Bu kısımda hedeflenen sistemin gerçekleştirilmesi için kullanılacak tekniklerden
bahsedilecektir.
2.1. Kablosuz Haberleşme
Günümüz bilgi çağının en büyük yansıması haberleşme teknolojisi üzerinde
olmuştur. Kablosuz haberleşme sistemleri, kullanıcılara genel olarak herhangi bir yerde
herhangi bir anda iletişim kurma olanağı sağlamaktadır. Kablosuz bağlantı
elektromanyetik dalgalarla verileri havadan ileten esnek bir iletişim sistemidir[1].
Kablosuz veri iletimini yüksek hızda yapabilen çeşitli teknolojiler bulunmaktadır.
Ancak bu teknolojiler hızı ile doğru orantılı olarak yüksek güç tüketirler. Bu fazla güç
tüketimi de, üreticilerinin ve kullanıcılarının büyük bir problemidir. Kablosuz
haberleşme denildiğinde akla ilk gelen video, resim, ses gibi büyük boyutlu verilerin
iletimidir. Ancak iletilecek olan veriler, her zaman büyük boyutlu olmayabilir. Kontrol
sistemlerinin ve dış ortamdan bilgi alabildiğimiz sensörlerin iletim yaptıkları veriler
küçük boyuttadır. Bu sebepten dolayı, bu sistemlerin verdiği verilerin iletimini
sağlamak ve daha düşük güç tüketimi yapan akıllı ağ topolojilerini destekleyecek
teknolojiler üzerinde çalışmalarda bulunulmuştur. IEEE, 802.12.4 standardını çıkarmış
ve bu standartları temel alan Zigbee protokolünün ve bu protokolü destekleyen
cihazların üretilmesi ve geliştirilmesini sağlamıştır[2]. Böylece; az güç tüketimli ve
düşük maliyetli Zigbee protokolünü destekleyen cihazlar hayatımızda yerini almaya
başlamıştır.
2.1.1. Zigbee
Bu kısımda projemizin kablosuz haberleşmesini sağlayacak olan Zigbee modem
üzerinde durulacaktır. Bu modem sistemimizde bilgisayar ile kontrol devresi arasındaki
haberleşmeyi sağlar.
Zigbee, adını arıların zig-zaglı karmaşık hareket yapılarından alır[2]. Bu karmaşık
hareketli yapı, ağdaki düğümler arası haberleşmeyi ifade eder. Bu haberleşmedeki
amaç, güvenilirliği yüksek, maliyeti düşük ve enerji tasarruflu ürün sağlamaktır. Ayrıca

5
müdahaleye açık ve görüntülenebilen ağ kullanılabilmektir. Endüstriyel, bilimsel ve
medikal radyo bantlarında kullanılan Zigbee teknolojisi; cihazların birbiri ile düşük güç
kullanarak iletişim kurmasını sağlar. Enerji tasarrufu yanında elektronik cihazların
batarya ömürlerinin uzaması zigbee kullanımının avantajıdır. Çünkü sık batarya
değişimi pratik bir uygulama değildir.
Zigbee’nin özellikleri şunlardır:
IEEE tarafından 802.15.4 koduyla standartlaştırılmış bir kablosuz iletişim
protokolüdür[3].
Maliyeti düşüktür.
Kurulumu kolaydır.
868 MHz-20kb/s, 915 MHz-40kb/s ve 2,4 GHz-250kb/s olarak üç farklı hızda
çalışır[1].
10-75 metre mesafeye kadar haberleşme sağlar.
İletim hızı yavaştır.
Üretici bağımsızlığı vardır.
Küçük boyutlu veri iletiminde kullanılır.
Güç tüketimi azdır, dolayısıyla altı ay- iki yıl arası kadar batarya ömrüne sahiptir.
İyi bir şifreleme tekniğine sahiptir.
2.1.2. IEEE 802.15.4 Standardı
Bu standart, kablosuz kişisel yerel ağlarında fiziksel ve ortam erişim yönetimi
katmanları için oluşturulmuştur[3]. Bu standartta; alt yapının düşük maliyetli, aktarım
hızının yavaş ve güç tüketiminin düşük olduğu kişisel ağlar oluşturulması
amaçlanmıştır.
802.15.4’ün özellikleri;
Üç farklı ISM bandı kullanılır.
Yıldız, örgü ve noktadan noktaya ağ yapılarını destekler.
Dinamik adresleme yapabilir.

6
Güvenli ve güvenilir bir iletişim sağlar.
CSMA-CA’yı destekler.
IEEE 802.15.4 standardı yukarıda anlatılan işlemleri iki katmanda gerçekleştirir:
Fiziksel Katman: Bu katman kanal seçimini, radyo frekans kontrolünü, ortamın veri
iletimi için uygunluğunun kontrolünü yapar.
Ortam Erişim Yönetimi Katmanı: Bu katman iletişimin güvenliliğini sağlayan
katmandır.
2.1.3. Zigbee Protokollerinin IEEE 802.15.4 İle İlişkisi
Şekil 4’ de görüldüğü gibi en üst katman kullanıcı uygulamaları için ayrılmıştır. Bu
katmanın altındaki ağ ve uygulama katmanları Zigbee standardı için tanımlanır. Diğer
katmanlar:
PHY Katman: Radyo frekanslarının haberleşmesini sağlayan katmandır.
MAC Katmanı: Düğümler arasında güvenilir haberleşmeyi sağlayan katmandır.
Ağ Katmanı: Bu katman karmaşık ağ topolojilerinde düzenin oluşturur.
Uygulama Katmanı: Ağ yönetim fonksiyonlarını, mesaj formatlarını, güvenlik
uygulamalarını belirler
Şekil 4. Zigbeeprokolü ile IEEE 802.15.4 standardı arasındaki bağlantı diyagramı [4].

7
2.1.4. Zigbee’ nin Ağ Yapısı ve Fiziksel Tabaka
ZigBee protokolünün kullandığı 3 tip aygıt vardır.
Zigbee Koordinatörü (ZC): PAN koordinatörü de denilmektedir. Her bir Zigbee
ağında sadece bir tane koordinatör vardır. Görevi aygıtlara PAN ID denilen ağ adını
atayarak ağı başlatmak ve ağ operasyonunu yürütmektir[4].
Zigbee Yönlendiricisi (ZR): Düğümlerin arasında yönlendirme işlemi yapar. Ağın
kapsamı bu yönlendirmelerle artırılmaktadır ve adreslemenin yapılıp yapılmayacağına
karar vermektedir[5].
Zigbee Son Aygıt (ZED): Bu aygıt ağ içerisinde bulunan en zayıf elamandır. Diğer
aygıtlara göre daha az enerji tüketen bu ayıt elde ettiği mesajı bir sonraki düğüme
iletmekle görevlendirilmiştir.
2.1.5. XBee Modül Stilleri
Çeşitli sürümleri olan XBee modüllerinin benzer pin bağlantıları vardır. Bu
sürümlerden Şekil 5’deki Xbee modülünü projemiz için kullanılmıştır. XBee çeşitleri
arasında güç çıkışı, anten tarzı, çalışma frekansı ve dâhili ağ yetenekleri gibi farklılıklar
olabilir[6].
Şekil 5. Xbee pro modülü

8
2.1.6. XBee Bacak Bağıntısı
DOUT/DIN: Bu pinler bilgisayardan (DOUT) seri bilgi alımını ve XBee’ ye (DIN)
gönderimini sağlayan pinlerdir.
RESET: Bu pinXbee ‘ye kaydedilen düzenleme ayarlarını sıfırlayacaktır.
CST/RTS/DTR: Bunlar xbee ve kontrol ya da bilgisayar arasındaki veri transferinin
koordinasyonu için kullanılır[6].
DIO0-DIO7/D08: 3.3V dijital giriş ve çıkış olarak kullanılır.
AD0 to AD6: Xbee’ye analog dijital konvertör girişleridir.
RSSI: Bu pin üzerinde RF sinyalin gücünü rapor edebilir.
PWM0/1: Direk olarak kullanılabilen bu pinler analog çıkış filtrelemesi yapar.
Xbee’ ninpin bağlantıları Şekil 6 ‘da gösterilmiştir.
Şekil 6. Xbee’ ninpin bağlantıları
2.1.7. Zigbee Ağ Topolojileri
Zigbee yıldız, bir noktadan bir noktaya, bir noktadan birden çok noktaya ve çok
noktadan tek noktaya, örgü ve ağaç topolojileri olarak birçok topoloji tipini destekler.

9
2.1.8. Zigbee ‘nin Kullanım Alanları
Zigbee diğer kablosuz iletim uygulamalara göre düşük hızda ve küçük boyuttaki
verilerin iletiminde kullanılır. Düşük güç tüketmesi ve maliyetinin uygun olmasından
dolayı sektörde birçok alanda yerini almıştır. Bu alanlardan ilk akla geleni otomasyon
çeşitleridir. Sensörler ve kontrol cihazları, küçük boyutlu verilerle çalıştıkları için
Zigbee bu alanda çok popülerdir. Evde, ofiste; ışık, kapı vb. kontrolü için kullanılabilir.
Bu cihazların birbiri ile kablo bağlantıları olmaksızın, haberleşebilmeleri zigbee ile
sağlanır ve hepsini birlikte bir kumanda ile kontrol etme imkânımız vardır.
2.1.9. Zigbee’nin diğer Kablosuz Teknolojilerle Karşılaştırılması
Zigbee ve diğer kablosuz teknolojiler arasında Başarı alanları, ağ boyutu vs. gibi bazı
farklılıklar bulunmaktadır. Bu karşılaştırmalar EK 3’ de belirtilmiştir.
2.2. Arduino
Projemizde bahçede bulunan sensörlerden bilgiyi alarak bu bilgiler doğrultusunda
gerekli kontrol işlemlerini gerçekleştirmek için Arduino kullanılmıştır. Bu kısımda
sulama sistemimizin kontrolü için Şekil 7’de kullanılan Arduino denetleyicisi tanıtılıp
neden ArduinoUno denetleyicisi kullanıldığı hakkında bilgi verilmektedir.
Şekil 7. Sistemde kullanılan ArduinoUno denetleyicisi

10
Arduino bir giriş/çıkış kartı ile açık kaynak kodlu geliştirilmiş bir mikro denetleyici
kartıdır[7].Açık kaynak kodlu demek kullanıcı ile kaynak kodlarının paylaşıldığının ve
değişiklik haklarının kullanıcıya verildiğinin anlamına gelir.Arduino aynı zamanda bir
fiziki programlama platformudur. Fiziki programlama dış dünya ile etkileşimde bulunan
sistemlerin programlanması demektir.Arduino İtalyan elektronik mühendisleri
tarafından geliştirilmiştir. Arduino kartlarının üzerinde Atmel AVR mikroişlemcisi
bulunur. Bu mikroişlemciler, arduinonun kendine has bir programa dili ile programlanır.
Arduo’nun yazılım dili C++ ile çok benzerdir. Hazırlanan programlar IDE yardımı ile
processig tabanlı olarak Arduino kartına yüklenir. IDE, kod yazılmasını ve bu kodların
güncellenmesine olanak sağlayan, aynı zamanda derlenen programı karta işleyen, Java
programlama dilinde yazılmış bir uygulamadır.
Arduino kartlarının birçok çeşidi vardır:
ArduinoUno
Arduino Mega 2560
ArduinoLilypad
Arduino Mega ADK
Arduino Ethernet
Arduino Bluetooth
Arduino Mini ve Mini Pro
ArduinoNano
ArduinoFio
Arduino Donanım Eklentileri (Shield)
2.2.1. Arduino Çeşitlerinin Genel Özellikleri ve Aralarındaki Farklar
Arduino kartlarının birçok çeşidi bulunmaktadır. Genel olarak bütün kartlarda benzer
bileşenler yer almaktadır. Fakat kartların giriş/çıkış pinlerinde, mikro denetleyici
modellerinde ve dahili modüllerin sayısı ile çalışma gerilimlerinde farklılıklar
bulunmaktadır. Farklı tipteki bu Arduino’ların donanım özelliklerine Tablo1 ‘de yer
verilmiştir. Bu çizeler projemiz için doğru olan Arduino’u seçmemize yardımcı
olmuştur. Projemiz için maliyeti ve özellikleri de hesaba katarak Arduno Uno
denetleyicisinin uygun olduğuna karar verildi.

11
Mikroişlemci: Mikroişlemci, bir Arduino’nun beynidir.
Giriş Voltajı: Arduino kartı için önerilen voltaj aralığıdır. Kart maksimum voltaj
aralığından çok az daha fazla voltajla da çalışabilir.
Sistem Voltajı: Kartın sistem voltajıdır diğer bir deyişle Arduino’da bulunan
mikroişlemcinin çalıştığı voltajdır.
UART: Arduino’nun desteklediği, birbirinden ayrı seri bağlantı çizgileri sayısıdır.
Çizelge 1. Arduino çeşitlerinin özellikleri
Arduino Çalışma
Voltajı Giriş
Voltajı UAR
T PW
M Analog
Çıktı Dijital I/O Analo
g
Girdi ArduinoUno 5V 7-12V 1 6 N/A 14 6
Arduino Mega R3 5V 7-18V 4 14 N/A 54 16
ArduinoFio 3.3V 3.35-12V 1 6 N/A 14 8
ArduinoNano 5V 7-12V 1 6 N/A 14 8
Arduino Mega
ADK 5V 7-18V 4 14 N/A 50 16
Arduino Mega
Pro 5V 5-12V 4 14 N/A 54 16
Arduino Mini 05 5V 7-9V 1 6 N/A 14 8
ArduinoLenoardo 5V 3.3-5V 1 7 N/A 25 12
PWM: Sinyal üretebilme kapasitesi olan dijital giriş/çıkış’ların sayısıdır. PWM
sinyalleri analog çıkışlar gibidir.
Dijital I/O: Arduino’daki dijital giriş/çıkış’ların sayısıdır. Bunların her biri giriş ya
da çıkış olarak bazısı ise PWM olabilecek şekilde tasarlanmıştır[8].

12
Analog Giriş: Arduino’daki kullanılabilir analog girişlerin toplam sayısıdır. Analog
pinler ‘’A’’ harfi ve yanındaki numaralarla isimlendirilir.
Saat Hızı: Mikroişlemcinin hıza bağlı frekans aralığıdır.
Bootloader: Mikroişlemci Arduino’nun beyni olarak nitelendirildiğinde takdirde,
bootloaderArduino’nun kişiliği olarak değerlendirilir. BootloaderATMega’nın içinde
yaşar ve seri port aracılığıyla donanım programlaması için yükleme yapımını sağlar.
Programlama Arayüzü: Arduino kartını programlamak için bilgisayarla bağlantı
kurmayı sağlar[9].
2.2.2. ArduinoUno
Şekil 8’de bacak pinleri gösterilen ArduinoUno’nun bazı bağıntıların kendine has
özellikleri bulunmaktadır:
Şekil 8. ArduinoUno kartı pin gösterimi

13
Seri İletişim: 0 (RX) ile 1 (TX) : USB ye bağlı olan bu bağıntılar, TTL seri sinyali
için kullanılmaktadır.
PWM: 3,5,6.9,10,11. pinlerdir ve 8 bit çözünürlüğünde PWM çıkışı sağlayabilen
bağıntılardır.
3.3 V veya 5 V çalışma gerilimine sahiptir.
3.3 V için 8 Mhz 5 V için 16 Mhz çalışma hızına sahiptir.
USB ve adaptör bağlantı portları bulunmaktadır.
32 KB flash belleğe sahiptir.
ICSP başlığı ve sıfırlama düğmesi vardır.
14 dijital giriş/çıkış pinine sahiptir. Bu pinlerden 6 tanesi PWM çıkışlarıdır.
6 tane analog giriş/çıkış pini vardır
2.2.3. ArduinoXbee Bağlantı
Projemizde bahçe kısmında bulunan ArduinoUno ve Xbee modülleri birbirine bağlı
konumdadır. Bu modüllerin bacak bağıntısının nasıl olacağı Şekil 9’da gösterilmiştir.
Şekil 9. Arduino Xbee pin bağlantısı

14
Projemizde Arduino ve Xbee bağlantısı için Xbee Shield Pro modülü kullanılmıştır
ve bu modül Şekil 10’da gösterildiği gibi iki modül arasında kablo bağlantısı
kullanmadan direk bağlantı kurulmasını sağlar.
Şekil 10. Xbee, Arduino ve Xbee Shield Pro Modülü
2.2.4. Neden Arduino?
Arduino birçok sensör tipi ile uyumlu bir şekilde bağlanabilir. Projemiz için
kullanacağımız nem ve sıcaklık sensörü ile de uyum içerisindedir.
Analog giriş çıkışları olması nedeniyle sensörlerden alacağımız analog girdiler
için artı bir modüle gerek yoktur.
Arduino ile birlikte çalışabilecek birçok ek donanım ürünleri vardır. Arduino
shield Pro bunlara örnektir.
Arduino’nun geliştirme ortamının ve sürücülerinin kurulumu kolaydır.
Benzerlerine göre fiyatı uygundur.
Geniş bir kütüphanesi bulunmaktadır bu sayede karmaşık işlemler kolaylıkla
gerçekleşmektedir.
Programlar başka bir platform üzerinde koşmadığından ve yorumlamalı bir dili
olmadığından oldukça hızlı çalışabiliyorlar [10].

15
2.3. Sensör
Projemizde sistemimizin devamlı kontrolü için bahçedeki toprağın nemi gibi fiziksel
değerlerine ihtiyacımız vardır. Bu fiziksel değerler hakkında bilgi edinmemizin tek yolu
ortamı ölçmedir ve ölçme işlemi de sensörler aracılığı ile sağlanmaktadır. Sensörler
fiziksel, kimyasal ya da elektriksel değişimleri, ölçülebilir elektriksel sinyallere
dönüştüren algılayıcılardır.Sensörlerden alınan veriler elektrik sinyaline dönüştürülür ve
daha sonra bu sinyaller elektronik devreler tarafından yorumlanır ve mekanik aletlere
kumanda edilebilir [11]. Bu göreviyle sensörler bizim projemizde önemli bir yerdedir.
Projemizde kullandığımız ArduinoUno denetleyicisi sensörlerden gelen verileri kolayca
yorumlayabilmektedir. Analog çıkış veren sensörlerden gelen veriler ArduinoUno
tarafından hassas bir şekilde değerlendirilebilmektedir.
2.3.1. Sensörler ile İlgili Temel Kavramlar
Doğruluk:Sensör tarafından hesaplanan bir büyüklüğün gerçek değerine
uygunluk derecesidir.
Hassasiyet:Sensörün çok küçük bir değişimi bile ölçebilmesidir.
Ölçüm Aralılığı: Algılayıcının cevap verebildiği etkinin minimum ve maksimum
değerleridir.
Çözünürlük: Bir algılayıcının çözünürlüğü, güvenilir bir biçimde algıladığı en
küçük girişin artımıdır.
Tekrarlanabilirlik: Aynı şartlarda yapılan ölçümlerin büyük ölçüde birbirlerine
benzer olma kabiliyetidir.
Ofset:Sensörün ofset hatası, çıkışın sıfır olması gerektiği durumda çıkışta görülen
değerdir.
Cevap Zamanı:Sensörün giriş parametresinde oluşan değişime karşı çıkışa tepki
verme süresinin bir ölçüsüdür.
Dinamik Doğrusallık: Girişteki etkinin değişim hızının takip edilebilme
kapasitesinin ölçüsüdür[12].

16
2.3.2. Toprağın Nemini Ölçen Sensör Çeşitleri
Nem endüstriyel uygulamada ölçülmesi ve kontrol altına alınması gereken
parametrelerden biridir. Toprak nemini ölçmeye yarayan bazı sensör yapıları vardır
bunlar:
Çiy noktası ölçer
Mekanik nem ölçme sensörü
Alüminyum/Seramik oksit sensörler
Islak ve kuru hazneli nem ölçme sensörü
Empedans, direnç sensörlü nemölçer
2.3.3. Toprak Nem Sensörü
Projemizde yer alantoprağın nemini ölçmeye yarayan Şekil 11’ de gösterilen sensör
toprağa gömülü halde çalışır. Bu sensör de nem ölçen problar vardır. Bu problar toprağa
veya bir sıvı içine batırıldığında bir direnç meydana gelir bundan dolayı prob uçları
arasında bir gerilim farkı oluşmaktadır.
Şekil 11. Toprak nemini ölçme sensörü

17
Ölçüm yapılacak ortama batırılan nem ölçerproblar oluşacak gerilim farkının
büyüklüğüne göre de nem miktarını ölçülebilir. Toprağın nem oranı arttıkça iletkenliği
de artmaktadır. Kart üzerinde yer alan trimpot sayesinde hassasiyet ayarı
yapılabilmektedir.
Topraktan alınan nem bilgisine göre sistem otomatik olarak çalışmaktadır. Elimizde
bulunan nem sensörüyle toprağın neminin bilgisini öğrenmiş olur ve sulama sistemi için
gerekli bilgilerden en önemlisini edinmiş olunmaktadır.
Projemizde kullandığımız toprak nem sensörünün özellikleri:
Çalışma Gerilimi: 3.3V-5V
Çıkış Gerilimi: 0-4.2V
Akım: 35 mA
Çıkış Türü: Dijital ve Analog
2.4. Selenoid Vana
Burada, projemizin sulama kısmında anahtar görevinde olan Şekil 12’de gösterilen
selenoid valf üzerinde durulacaktır. Selenoid valf; giriş kaynağından aldığı enerji ile
oluşturduğu manyetik kuvvet ile gerekli sistemi harekete geçiren bobinden
oluşmaktadır[13]. ArduinoUno’dan gelen işarete göre bu valf açılarak su akışı
sağlanacaktır ve sulama gerçekleşecektir. Bu vana 2/2 yollu normalde kapalı, çekirdek
tip, direk çekmeli 3mm 12 V Dc bir selenoid vanadır.
Şekil 12. Selenoid Vana

18
3. YAPILAN ÇALIŞMALAR
3.1. Xbee Konfigürasyonu Çalışması
Kablosuz haberleşmede kullanacağımız zigbee ağından daha önce bahsedilmişti.
Şimdi de bu ağda kullanılacak X-BEE cihazlarımızın konfigüre edildiği X-CTU
programından ve konfigürasyon ayarlarımızdan bahsedilecektir.
X-BEE, bahsi geçen iletişim protokolüne sahip RF haberleşmesinden farklı olarak
data alma ve gönderme işlemini yapabilen elektronik cihazdır. X-CTU ise; digi firması
tarafından üretilen konfigürasyon ayarlarının yapıldığı programdır. Yani kuracak
olduğumuz sistemdeki X-BEE cihazlarının hangi konumda çalışacağını
ayarlayabildiğimiz program X-CTU programıdır. İletişim ağı ile ilgili bazı terimler;
Kişisel Alan Ağı (PAN): X-BEE ile data iletimi yapmak isteniyorsa kesinlikle bu
iletişim alanının oluşturulması gerekir. Aksi takdirde hiçbir cihaz haberleşemez. Bu
alanı oluştururken dikkat edilmesi gereken en önemli unsur ise şüphesiz PAN ID’ dir.
PAN ID; PAN ağının adresidir. Data iletimi yapacağımız bütün cihazlarımızın ID’ leri
aynı olmalıdır. İletişim ağında bu ID’ leri ‘koordinatör’ diye adlandırdığımız cihaz
kontrol eder. Data geldiğinde koordinatördatayı gönderen cihazın adresi
kendisininkinden farklı ise cihazı ağa almaz.
Koordinatör (C): PAN ağını yönetecek olan X-BEE cihazına koordinatör denir.
Yani koordinatör olarak konfigüre edilen cihazımızdır.Yukarıda da belirttiğimiz gibi
koordinatör; PAN adreslerini ve iletim yolunu belirler. Bir PAN ağının başlamasından
C sorumludur. Ağ başladıktan sonra ‘Son Aygıt’ ve ‘Yönlendirici’ lerin ağa katılmasını
sağlar. Koordinatördata alıp gönderebilir. Koordinatör PAN ağımızı yöneteceği için pil
ile beslenmemelidir. Herhangi bir nedenle enerjisi kesilirse veya yetersiz gelirse tüm ağ
çökecektir. Bu sebeple sabit bir güç kaynağından beslenmesi ve ‘ana güç modu’ denilen
standart güç modunda çalıştırılmalıdır.
Yönlendirici (R): Kendisi ağa katıldıktan sonra; diğer R ve E’ lerin de ağa
katılmalarını sağlayacak ve data alıp gönderebilecek şekilde konfigüre edilmiş
cihazlardır. Bu işlemleri yapması için ağın koordinatörü tarafından ağa kabul edilmesi

19
gerekir. Yani adresinin koordinatör ile aynı olması gerekir. Son aygıt kendisinden
sonraki cihazların ağa katılmasını sağlayacağı için yüksek güç modlarında
çalıştırılmamalıdır.
Son Aygıt(E): PAN’ın sonlandırıcı elemanı olarak düşünülebilir. Başka bir cihazın
ağa katılma işleminden sorumlu değildir. C veya R tarafından ağa alındıktan sonra data
iletimi yapabilir.
X-BEE cihazlarının konfigürasyonunu X-CTU programından yapılmaktadır. Bu
programı ücretsiz olarak indirdikten sonra; kendimizin de tasarlayabileceği ‘dongle’
denilen cihazla cihazlarımız bilgisayarımıza bağlandı ve cihazlarımızı kullanma
amacımıza göre konfigüre edildi.
X-CTU programını açtığımızda karşımıza çıkan görüntü Şekil 13‘de verilmiştir.
X-CTU açılış penceresinde ‘Select Com Port’ menüsünden ayar yapacağımız Xbee’nin
takılı olduğu portu seçip 1 ‘nolu‘Test Query’ sekmesine tıkladığımızda gelen pencere
de Şekil 13’deki gibidir.
Şekil 13. X-CTU açılış penceresine X-CTU modem penceresi
20
X-BEE cihazları ‘default’ olarak 9600 baud ile ayarlanmıştır. Yani bilgisayarın tüm
sekmelerinde bu baud ile işlem yaparlar. Bunun için baud ayarını değiştirirsek
cihazımız hata verecektir.
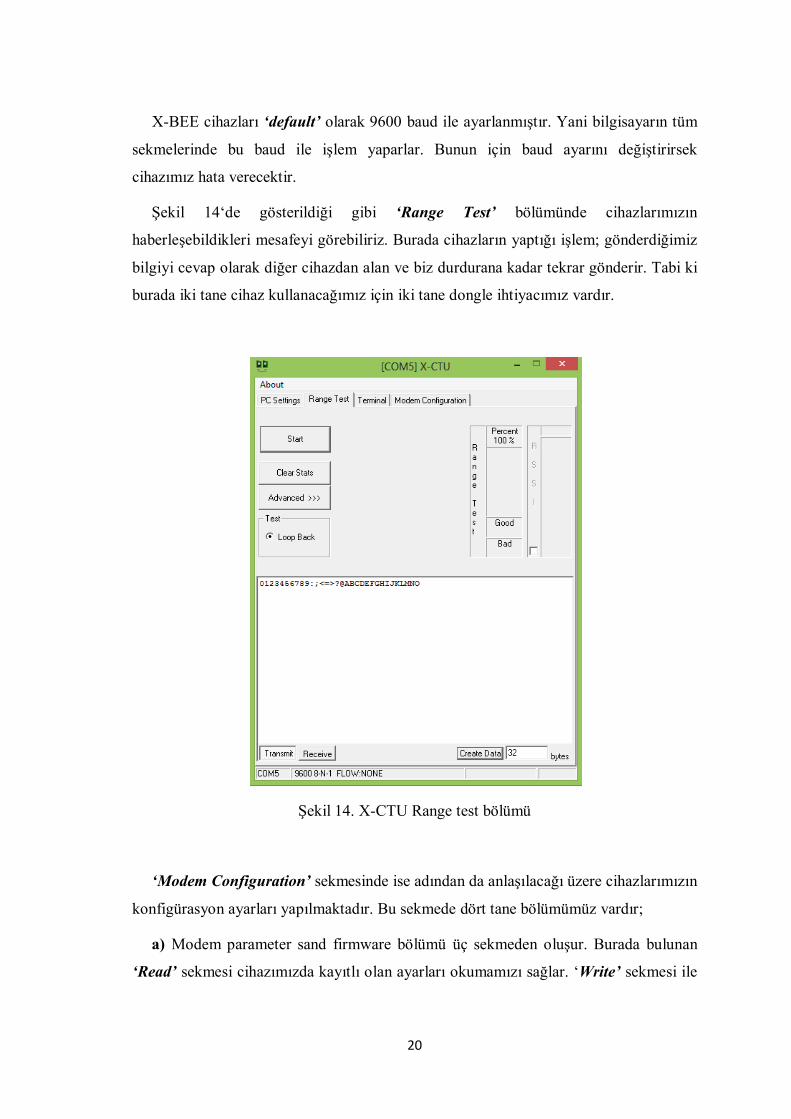
Şekil 14‘de gösterildiği gibi ‘Range Test’ bölümünde cihazlarımızın
haberleşebildikleri mesafeyi görebiliriz. Burada cihazların yaptığı işlem; gönderdiğimiz
bilgiyi cevap olarak diğer cihazdan alan ve biz durdurana kadar tekrar gönderir. Tabi ki
burada iki tane cihaz kullanacağımız için iki tane dongle ihtiyacımız vardır.
Şekil 14. X-CTU Range test bölümü
‘Modem Configuration’ sekmesinde ise adından da anlaşılacağı üzere cihazlarımızın
konfigürasyon ayarları yapılmaktadır. Bu sekmede dört tane bölümümüz vardır;
a) Modem parameter sand firmware bölümü üç sekmeden oluşur. Burada bulunan
‘Read’ sekmesi cihazımızda kayıtlı olan ayarları okumamızı sağlar. ‘Write’ sekmesi ile

21
yaptığımız ayarlar cihazımıza yüklendi. ‘Restore’ sekmesi ise cihazımızın üretim
ayarlarına dönmesini sağlamaktadır.
b)Parameterview bölümü iki sekmeden oluşur. ‘ClearScrean’ sekmesi yapılmış olan
ayarları temizler. ‘Show Defaults’ sekmesi ise üretim ayarları yüklenen cihaza hangi
ayarları yükleyebileceğimizi gösterir.
c)Profile bölümü iki sekmeden oluşur. ‘Save’ sekmesi cihazdaki ayarları
bilgisayarımıza kaydeder ve ‘Load’ sekmesi ise yüklü ayarları cihazımıza yüklememizi
sağlar.
d)Version bölümünde ise ‘Download New Versions’ sekmesi vardır. Bu sekme
cihazın farklı konfigürasyon ve versiyonlarını gösterir.
3.1.1. Sistemin Konfigürasyonu
Bizim sistemimizin haberleşme kısmı, iki tane X-BEE cihazından oluşmuştur.
Cihazların biri ‘koordinatör’, diğeri ‘son aygıt’ olarak konfigüre edildi. Bu
konfigürasyonu aşağıdaki şekilde yapıldı.
Koordinatör için;
PAN ID belirlendi. (1122)
ScanChannelsbelirlendi. (1FFE)
ScanDurationbelirlendi (opsiyonel). (3)
DestiinationAdressLowbelirlendi. (FFFF)
DestiinationAdress High belirlendi. (0)
NI belirlendi. (COORDINATOR)
CoordinatorEnable belirlendi. (1)
MY-16 Bit Source ADRESS belirlendi. (0)
Son Aygıt için;
PAN ID belirlendi. (1122)
ScanChannels belirlendi. (1FFE)
ScanDuration belirlendi (opsiyonel). (3)

22
DestinationAdressLow belirlendi. (0)
DestiinationAdress High belirlendi. (0)
NI belirlendi. (END DEVİCE)
CoordinatorEnable belirlendi. (0)
MY-16 Bit Source ADRESS belirlendi. (3)
Cihazlarımızın yukarıda koordinatör için belirlenen yapılandırma ayarlarının
düzenlenmesiŞekil 15‘deki resimde de görülmektedir.
Şekil 15.Koordinatör yapılandırma ayarları
Burada koordinatör olan cihazda DH-DL adresleri; koordinatörün ağdaki tüm
cihazlara data gönderebilmesi için 0x0000-0xFFFF aralığında seçilmiştir. Son aygıta
sadece C’ye data göndereceği için 0x0000-0x0000 aralığında seçilmiştir.

23
Cihazlarımızın yukarıda son aygıt için belirlenen yapılandırma ayarlarının
düzenlenmesiŞekil 16‘deki resimde de görülmektedir.
Şekil 16.Son aygıt yapılandırma ayarları
3.1.2. X-CTU Arduino Haberleşme Çalışması
Projemiz için uzaktan haberleşme kısmında kullandığımız Zigbee’ler için
yapılandırma ayarlarını X-CTU programı üzerinden yapılmıştır. Bu ayarlamalar ile
birlikte bilgisayar ile bahçedeki ArduinoUno denetleyici arasında bağlantı kurmuş
olundu. Bu bağlantıyı X-CTU ‘nun ‘Terminal‘ kısmına yazdığımız karakterlerle
sağlanmıştır. Şekil 17‘de görüldüğü gibi ‘terminal’ sekmesine ‘a’ karakteri
yazdığımızda selenoid su vanası çalışmaktadır, ‘b’ karakteri yazdığımızda ise çalışan

24
selenoid su vanası kapanmaktadır. Ayrıca toprak nem sensöründen alacağımız analog
değerler bu terminal ara yüzünde görülmektedir.
Şekil 17. X-CTU Arduino haberleşme penceresi
3.2. Bahçe Sulama Devresi Yapısı
Şekil 18‘de Proteus-Isis programıyla çizilmiş olan bahçe sulama devresi
gösterilmiştir. Bu devrede bulunan selenoid su vanası 12 V ile çalışmaktadır. Bunun
için devrede 12 V dc adaptor kullanılmıştır. ArduinoUno mikro denetleyici kartından
çıkış olarak kullandığımız dijital pinden ise 0V veya 5V çıkış almaktayız. Dijital pin
çıkışından aldığımız 5V ile selenoid su vanasını sürmek için bir normalde açık röle
kullanılmıştır. İçinde Arduino’nun, selenoid su vanasının ve adaptörün bulunduğu
devrenin baskı devresi Şekil 19’da gösterilmiştir.
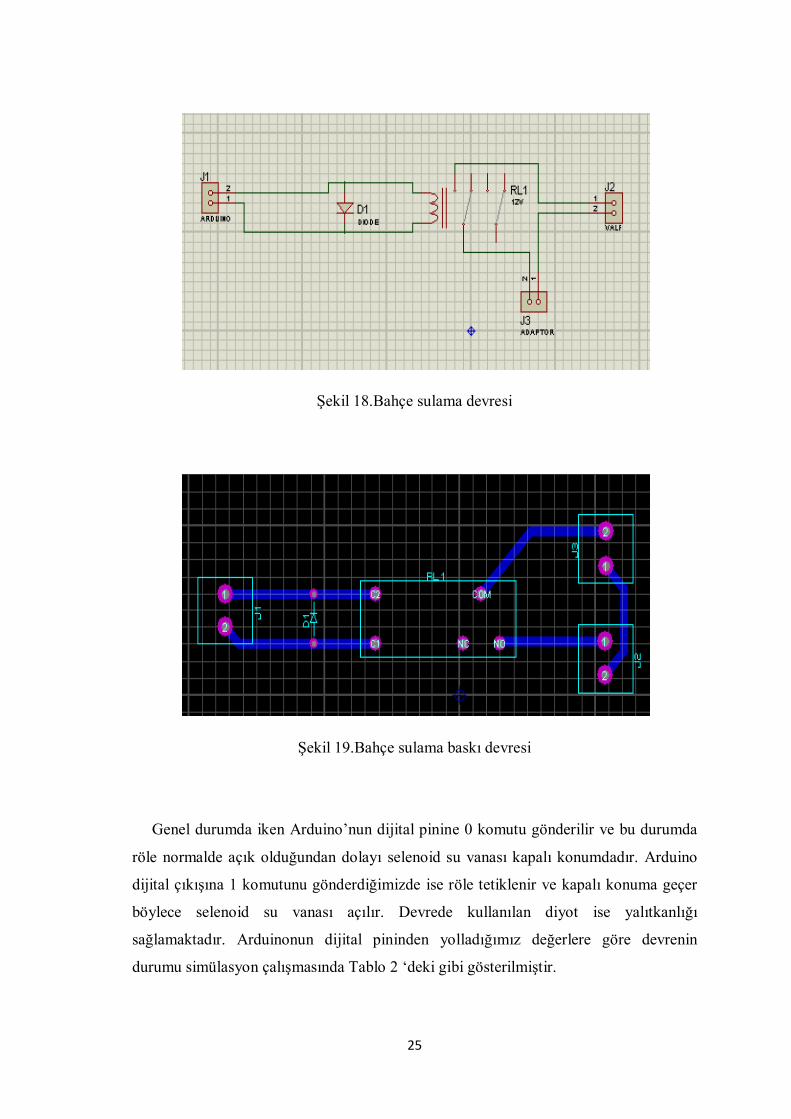
25
Şekil 18.Bahçe sulama devresi
Şekil 19.Bahçe sulama baskı devresi
Genel durumda iken Arduino’nun dijital pinine 0 komutu gönderilir ve bu durumda
röle normalde açık olduğundan dolayı selenoid su vanası kapalı konumdadır. Arduino
dijital çıkışına 1 komutunu gönderdiğimizde ise röle tetiklenir ve kapalı konuma geçer
böylece selenoid su vanası açılır. Devrede kullanılan diyot ise yalıtkanlığı
sağlamaktadır. Arduinonun dijital pininden yolladığımız değerlere göre devrenin
durumu simülasyon çalışmasında Tablo 2 ‘deki gibi gösterilmiştir.

26
Çizelge 2. Bahçe Sulama Sistemi simülasyon çalışması
3.2.1. Bahçe Sulama Devresi Akış Diyagramı
Şekil 20‘deki akış diyagramından görüldüğü gibi Arduino Uno belirli koşullar
doğrultusunda Selenoid su vanasını açıp kapamaktadır. Bu belirli koşulları yani nem
sensörünün hangi değerler arasında sistemi doğru açıp kapayacağını deneysel yöntemler
kısmında yaptığımız uygulama ile belirledik. Akış diyagramında görüldüğü gibi
sistemimiz otomatik ve manual olarak çalışmaktadır. Ayrıca sistemin otomatik olması
su tasarrufunun yüksek derecede olmasını sağlamaktadır.
Şekil 20. Akış diyagramı
Dijital çıkış Röle Durumu Vana
Lojik 0 Açık Çalışmıyor
Lojik 1 Kapalı Çalışıyor

27
3.3. Bahçe Damlama Sulama Sisteminin Oluşturulması
Damlama sulama suyun Şekil 21’de gösterilen su borusu ve bu boruya belirli
aralıklarla yerleştirilmiş damlatıcılar yardımıyla bitki köklerine ulaştırılmasıdır.
Damlatıcılar yalnızca bitki köklerinin geliştiği kısımda bulunur. Böylece yalnızca
geliştirilmek istenen bitki büyütülmüş olur ve bitki harici yabancı ot büyümesi
engellenmiş olur.Bahçenin yalnızca bitki kökleri ıslatıldığı için damlama sulama ile
daha fazla alan daha az su ile sulandırılmaktadır. Bitkinin toprak üstündeki organları
ıslatılmadığından bitkide hastalık oluşması engellenir. Bitki hastalıklarının
engellenmesiyle tarımda kullanılan ilaçlamanın bir kısım önüne geçilir.
Şekil 21. Sistem için damlama sulama su borusu ve damlatıcıları
Bir damlatıcının debisinin damlatıcıya giren suyun giriş basıncına bağlı olduğu
belirtilir. Basınç ve debi arasındaki ilişki birçok araştırmacı tarafından (3,1) numaralı
denklemde ifade edilmektedir [14].
q =( k) x( h) x(X ) (3.1)
Burada q damlatıcı debisi (l/h), k damlatıcı boyutlarını karakterize eden katsayı, h
damlatıcı basıncı (mSS), x ise damlatıcı akış rejimi katsayısı olarak ifade edilmektedir.
Sistemimizin oluşturulması için kullanılan selenoid su vanasının borusu 3 mm
çapındadır. 3 mm çapında bulunan su borusu selenoid su vanasına takılmıştır. Bu
borunun su deposuyla ve saksılarla olan bağlantısı gerçekleştirilmiştir. Saksı boyunca
uzatılan bu boruya damlama sulama için 3 tane damlatıcı takılmıştır.

28
4. DENEYSEL ÇALIŞMALAR
4.1. Toprak Nem Sensörünün Çalışması
Projemizde toprak nem değerini algılayan sensör ile gerekli nem aralıklarını
belirlemek için deneysel çalışmalar yapıldı. Bu çalışma kuru toprağı ve suya doymuş
toprağı referans alarak yapıldı. Şekil 22 ‘de gösterilen düzenek kurularak bu işlem
sırasıyla gerçekleştirildi. Bu düzenek için 0,5 litre plastik şişenin üst kısmı kesildi.
Geriye kalan kısma yeterince referans toprak koyuldu ve nem sensörü içine gömülü
halde konumlandırıldı. Toprak nem değerini analog olarak okumak için de Arduino
mikro denetleyici kartı kullanıldı. Toprak nem sensörünün çıkış gerilimi 0 V ile 5V
arasındadır.
Şekil 22. Toprak nem değeri ölçüm düzeneği
Kuru toprak referans alınarak yapılan ölçümlerde toprak nem sensörü tamamen
sudan arıtılmış toprağa batırıldı. Arduino Uno’ya gerekli program yazılarak
kurutopraktan alınan analog veriler Şekil 23 ‘de gösterildiği gibi seri monitörde
incelendi. Bu verilere göre ortalama bir değer alındı ve kuru toprağın analog veri sınırı
belirlendi.

29
Şekil 23. Seri monitöründe incelenen kuru toprağın verileri
Suya doymuş toprak baz alınarak yapılan ölçümlerde toprak nem sensörü tamamen
suya doymuş toprağa batırıldı. Arduino Uno’ya gerekli program yazılarak kuru
topraktan alınan analog veriler Şekil 24 ‘de gösterildiği gibi seri monitörde incelendi.
Bu verilere göre ortalama bir değer aldık ve kuru toprağın analog veri sınırını belirlendi.
Şekil 24. Seri monitöründe incelenen suya doymuş toprağın verileri

30
Bu verileri inceleyerek topağın kuru, suya doygun olduğu seviye ve normal seviyede
olduğu değerler için aralıklar belirledik. Bu verilere göre gerekli programımızı
oluşturduk. Arduino kartına yüklediğimiz bu verilerin bulunduğu programa göre toprak
nem sensörü toprağın kuru veya suya doygun olduğunu algılamaktadır ve bu duruma
göre selenoid su vanasını açmaktadır.Toprak nem sensörünün çıkış gerilimi 0 V ile 5V
arasındadır Şekil 23 ve Şekil 24 ‘de seri monitördede görülen değerler Tablo 3’de
gösterilmiştir. Bu değerlere göre 0,2 V ‘un altındaki değerlerde toprak suya doymuş, 1,5
V ‘un üzerinde ki değerlerde ise toprak kurudur.
Çizelge 3. Toprak nem sensörü verileri
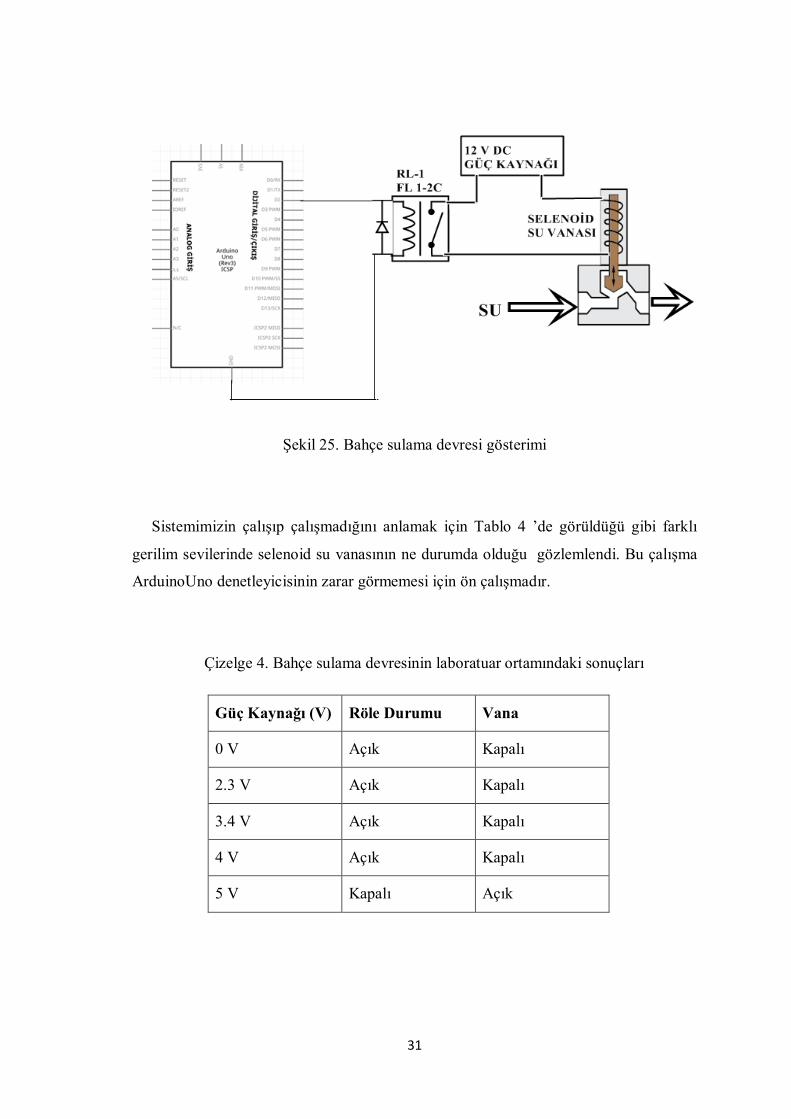
4.2. Bahçe Sulama Devresinin Laboratuar Ortamında Gerçekleştirilmesi
Şekil 25 ‘ deki bahçe sulama devresini laboratuar ortamında kuruldu ve Arduino Uno
denetleyici yerine bir güç kaynağı kullanıldı. Bu güç kaynağından sisteme 0-5V
arasında farklı gerilim seviyeleri uygulandı.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
t1 t2 t3 t4 t5
kuru toprak
ıslak toprak
V
t
31
Şekil 25. Bahçe sulama devresi gösterimi
Sistemimizin çalışıp çalışmadığını anlamak için Tablo 4 ’de görüldüğü gibi farklı
gerilim sevilerinde selenoid su vanasının ne durumda olduğu gözlemlendi. Bu çalışma
ArduinoUno denetleyicisinin zarar görmemesi için ön çalışmadır.
Çizelge 4. Bahçe sulama devresinin laboratuar ortamındaki sonuçları
Güç Kaynağı (V) Röle Durumu Vana
0 V Açık Kapalı
2.3 V Açık Kapalı
3.4 V Açık Kapalı
4 V Açık Kapalı
5 V Kapalı Açık

32
5. SONUÇLAR
Gün geçtikçe artan insan nüfusuyla beraber, tükenen su kaynaklarımız tarımsal
alanda en çok tartışılan konu haline gelmiştir. Suyun insan ve tarım alanındaki önemine
göre biz de bu konuyu ele alarak başladığımız projemizi başarıyla gerçekleştirmiş olup,
tasarlamış olduğumuz sistemde toprak nem miktarı azaldıkça sistemimiz sulama
işlemini otomatik olarak gerçekleştirmekte ve nem miktarının gereken değere
ulaşmasıyla birlikte sulama işlemi yine otomatik olarak durdurulmaktadır. Bu sistemde
sulama ayrıca damlama sulama sistemiyle gerçekleştirilmiştir ve bu sistemle birlikte
yalnız bitki kökü sulanarak su israfından kaçınılmış. Ayrıca sistem belirlenen X-CTU
terminal arayüzü ile beraber bilgisayar vasıtası ile kontrol edilebilmektedir. Son olarak
sistem içi haberleşme de hedeflenildiği gibi kablosuz olarak gerçekleştirilmiştir. Proje
yapım aşamasında özellikle haberleşme elemanlarında bazı problemler yaşanmıştır. Bu
problemler de deneysel çalışmaların sonucunda çözülerek projemiz hedefimize uygun
hale gelmiştir. Projemiz geliştirilmeye açıktır. Projemim geliştirilmesi açısından sistem
bilgisayar ile kontrol edilebildiği gibi telefon ile SMS ile de kontrol edilebilinir. Ayrıca
projemiz için geliştirdiğimiz sistemde bir adet toprak nem sensörü kullanılmıştır ve bu
yalnızca toprak nemini ölçmektedir. Daha büyük ve geniş alana sahip bahçelerde daha
geniş alan için nem ve sıcaklık değeri ölçen sensörler kullanılabilir.
Bu çalışmada bir sistemin mikrodenetleyici yardımıyla nasıl kontrol edilebileceği,
sistemde kullanılan devre elemanlarının seçiminin nasıl yapılabileceği öğrenilmiştir.
Projenin çalışma takvimi EK-6’da verilmiştir.

33
Şekil 26. Bahçe Sulama uygulaması
Şekil 26 ‘da bu projenin gerçekleştirilmesi için oluşturulan maket, kısım kısım
göstermektedir. 1 no’lu kutuyla gösterilen kısım sulama için maketimizin su deposunu
ifade ederken2 no’lu kutuyla gösterilen kısım oluşturduğumuz saksıdan bahçeyi, toprak
nem sensörünü ve gerekli otomatik kontrol elemanlarını içermektedir.

34
6. YORUMLAR VE DEĞERLENDİRME
Projemizde öncelikli amacımız yetiştirdiğimiz tarım ürünlerinin su ihtiyaçlarını
gerektiği anda gerektiği kadar kullanmak ve fazla su tüketiminin önüne geçmek
olmuştur. Bunun yanında; projemiz daha büyük çapta gerçekleştirildiği takdirde zaman
ve iş gücünden büyük ölçüde tasarruf sağlayacaktır.
Bu kapsamda ilk olarak gerekli malzemelerin temin edilmesi, ardından nem sensörü
ile deneysel çalışmalar yapılmış ve nem değerlerine göre sensörden gelen gerilim
değerleri ölçülmüştür. Daha sonra; bu değerlere göre Arduino işlemcimizin
programlaması yapılmıştır. Yazılım işlemimiz tamamlandıktan sonra selenoid su
vanamızın güç devresi tamamlanıp sistemimize eklenmiştir. Sistemimizde kablo
kısıtlamasını engellemek amacıyla; x-bee cihazlarının konfigürasyonu yapılıp kablosuz
haberleşme ağı sistemimize eklenmiştir. Son olarak sistemimizin haberleşme ağının
programlandığı X-CTU programının ara yüz programından kontrol edilebilmesi
sağlanmıştır.
Sonuç olarak yaptığımız bu proje ile bahçemizdeki sebze, meyve vb. rahatlıkla
minimum işgücü ve maksimum su tasarrufu ile sulayabiliriz. Projemiz maliyeti biraz
daha arttırarak daha karışık bahçe sistemlerini sulayabilecek seviyededir. Ayrıca
yazılım kısmı biraz daha geliştirilip haberleşme kısmına daha güçlü cihazlar ekleyerek
farklı nem seviyelerinde yetişebilen çok fazla tarımsal ürün kolaylıkla sulanabilecektir.

35
KAYNAKLAR
[1]. A.B.Tekin, Ç.Demirel, Ç. Örün,”Tarımda kablosuz Ağlar,” Ege Üniversitesi,
Ziraat Fakültesi, Tarım Makinaları Bölümü, İzmir,2011.
[2]. ”ZigBee Specifications, Presentation Slides”, IEEE 802.15.4 Specification,
December 14, 2004.
[3]. “Wireless Medium Access, Control (MAC) and Physical Layer (PHY),
Specifications for Low-Rate Wireless, Personal Area Networks (LR-WPANs)”, IEEE
802.15.4 Specification,Part 15.4, 2003.
[4]. I. Marsden, “Network Layer Overview”, Presentation Slides, Embedded Systems
Show, Birmingham, October 12th, 2006.
[5]. R. Faludi, “ Building wireless Sensor Networks” , Printed in the United States of
America, Published by O’Reilly Media, Inc. 1005 Gravenstein Highway North,
Sebastopol, December 2010.
[6]. H.Altun, F. Akdeniz, N.Ünver “Uzaktan Robotik El Kontrolü”, Bitirme Tezi,
Karadeniz Teknik Üniversitesi, Elektrik Elektronik Fakültesi, Elektrik Mühendisliği
Bölümü, Trabzon, Türkiye, Haziran, 2013.
[7]. E.R. Melgar and C.C. Diez, “Arduino and kinect projects”, Distributed to the book
trade world wide by Springer Science+Business Media, p.p 450-500, New York,2012.
[8]. D.Wheat,“Arduino Internals”, Distributed to the book trade world wide by
Springer Science+Business Media, LLC, p.p 342-440, New York,2011.
[9]. K. Karvinen and T. Karvinen ,”Arduino Bots and Gadgets” , Published by
O’Reilly Media, Inc., 1005 Gravenstein Highway North, Sebastopol , p.p 250-
300,Printed in Canada, 2011.
[10]. C. Taşdemir, “Arduino”, Dikeyeksen yayıncılık, Yazılım ve Eğitim Hizmetleri
San. Ve Tic. Ltd. Şti, Yayıncılık Sertifika No 19708, 1. Baskı, Şubat, İstanbul, 2011.
[11]. “Sensörler ve Transdüserler”,Mesleki Eğitim ve Öğretim Sisteminin
Güçlendirilmesi Projesi, Elektirik Elektronik Teknolojisi, Ankara,2007.

36
[12]. U. Duran, Ö. Demir, C. Yavuz, “ DHT11 Sıcaklık ve Nem Sensörü İle bilgisayar
Destekli Ölçüm ve Kontrol Devresinin İmalatı ve Deneysel Olarak İncelenmesi”,Proje
Tabanlı Mekatronik Eğitim Çalıştayı, Çankırı-Ilgaz, 2012.
[13]. “Temel Pnömatik”, Mesleki Eğitim ve Öğretim Sisteminin Güçlendirilmesi
Projesi, Endüstriyel Otomasyon Teknolojileri, Ankara,2007.
[14]. A.Korukçu,” Damla Sulamasında Yan Boru Uzunluklarının Saptanması Üzerinde
Bir Araştırma”, A.Ü.Ziraat Fakültesi Yayınları: 742, Bilimsel Araştırma ve İncelemeler:
432, A.Ü.Bafum«vi, Ankara, 1980

37
EKLER
EK‐1. IEEE ETIK KURALLARI
Bu kısımda IEEE Etik Kuralları, IEEE Code of Ethics ve Mühendisler için Etik
Kuralları sırasıyla sunulmuştur.

IEEE Etik KurallarıIEEE Code of Ethics
IEEE üyeleri olarak bizler bütün dünya üzerinde teknolojilerimizin hayatstandartlarını etkilemesindeki önemin farkındayız. Mesleğimize karşı şahsisorumluluğumuzu kabul ederek, hizmet ettiğimiz toplumlara ve üyelerine enyüksek etik ve mesleki davranışta bulunmayı söz verdiğimizi ve aşağıdaki etikk ll k b l ttiği i i if d d ikuralları kabul ettiğimizi ifade ederiz.
1. Kamu güvenliği, sağlığı ve refahı ile uyumlu kararlar vermenin sorumluluğunukabul etmek ve kamu veya çevreyi tehdit edebilecek faktörleri derhalaçıklamak;
2. Mümkün olabilecek çıkar çatışması, ister gerçekten var olması isterse sadecealgı olması, durumlarından kaçınmak. Çıkar çatışması olması durumunda,etkilenen taraflara durumu bildirmek;
3. Mevcut verilere dayalı tahminlerde ve fikir beyan etmelerde gerçekçi vedürüst olmak;
4. Her türlü rüşveti reddetmek;
5. Mütenasip uygulamalarını ve muhtemel sonuçlarını gözeterek teknolojianlayışını geliştirmek;
6. Teknik yeterliliklerimizi sürdürmek ve geliştirmek, yeterli eğitim veya tecrübeolması veya işin zorluk sınırları ifade edilmesi durumunda ancak başkaları içink l jik l l kl ü l kteknolojik sorumlulukları üstlenmek;
7. Teknik bir çalışma hakkında yansız bir eleştiri için uğraşmak, eleştiriyi kabuletmek ve eleştiriyi yapmak; hatları kabul etmek ve düzeltmek; diğer katkısunanların emeklerini ifade etmek;
8. Bütün kişilere adilane davranmak; ırk, din, cinsiyet, yaş, milliyet, cinsi tercih,i i t ki liği i i t if d i ü i d l k dcinsiyet kimliği, veya cinsiyet ifadesi üzerinden ayırımcılık yapma durumunagirişmemek;
9. Yanlış veya kötü amaçlı eylemler sonucu kimsenin yaralanması, mülklerininzarar görmesi, itibarlarının veya istihdamlarının zedelenmesi durumlarınınoluşmasından kaçınmak;
10 Meslektaşlara ve yardımcı personele mesleki gelişimlerinde yardımcı olmak10. Meslektaşlara ve yardımcı personele mesleki gelişimlerinde yardımcı olmakve onları desteklemek.

IEEE Code of Ethics
We, the members of the IEEE, in recognition of the importance of ourtechnologies in affecting the quality of life throughout the world, and in acceptinga personal obligation to our profession, its members and the communities weserve, do hereby commit ourselves to the highest ethical and professional
d t dconduct and agree:
1. to accept responsibility in making engineering decisions consistent with the safety, health and welfare of the public, and to disclose promptly factors that might endanger the public or the environment;
2 id l i d fli f i h ibl d2. to avoid real or perceived conflicts of interest whenever possible, and to disclose them to affected parties when they do exist;
3. to be honest and realistic in stating claims or estimates based on available data;
4. to reject bribery in all its forms;
5. to improve the understanding of technology, its appropriate application, and potential consequences;
6. to maintain and improve our technical competence and to undertake technological tasks for others only if qualified by training or experience, or after full disclosure of pertinent limitations;
7. to seek, accept, and offer honest criticism of technical work, to acknowledge and correct errors, and to credit properly the contributions of others;
8. to treat fairly all persons regardless of such factors as race, religion, gender, disability, age, or national origin;
9. to avoid injuring others, their property, reputation, or employment by false or mlicious action;
10. to assist colleagues and co‐workers in their professional development and to support them in following this code of ethics.
Approved by the IEEE Board of DirectorsA 1990August 1990
ieee‐ies.org/resources/media/about/history/ieee_codeofethics.pdf

Code of Ethics for Engineers
Mühendisler İçin Etik Kuralları
Etik kuralları ile ilgili faydalıweb adresleri
IEEE Code of Ethicshttp://www.ieee.org/about/corporate/governance/p7‐8.html
NSPE Code of Ethics for Engineershtt // / / thi / d thihttp://www.nspe.org/resources/ethics/code‐ethics
American Society of Civil Engineers, UC Berkeley Chapterhttp://courses.cs.vt.edu/professionalism/WorldCodes/ASCE.html
Engineering Ethics BY DENISE NGUYENEngineering Ethics BY DENISE NGUYENhttp://sites.tufts.edu/eeseniordesignhandbook/2013/engineering‐ethics‐2/
Code of Ethics of Professional Engineers Ontariohttp://www.engineering.uottawa.ca/en/regulations
Bir kitap:What Every Engineer Should Know about EthicsYazar: Kenneth K. HumphreysCRC Press
EMO – Elektrik Mühendisleri OdasıEtik Kütüphanesihttp://www.emo.org.tr/genel/bizden_detay.php?kod=50871&tipi=46&sube=0#.U1QfyVV_tjs

41
EK‐2. Disiplinler Arası Çalışma
Bu kısımda projemiz için farklı disiplinlerden alınan yardımlar yazılmıştır.
EK-2. Çizelge 1. Disiplinler Arası Çalışma
Alınan Disiplinlerarası Yardım
Yardımın Alındığı Kişi/Kuruluş
Disiplinler Arası Çalışma
Damlama boru sisteminin oluşturulması, damlatıcıların takılması
Hekimoğlu Damlama Sulama
Su deposu ile su borusu arasındaki bağlantı
Yılmaz tesisat
Damlama sulama su borusunun su deposu ile selenoid su vanasına olan bağlantısı kısmında tesisatçıdan yardım alınmıştır.

42
EK‐3. Zigbee’nin bazı kablosuz teknolojilerle karşılaştırılması
EK-3. Çizelge 1. Zigbee’nin diğer kablosuz teknolojilerle karşılaştırılması
Özellik Zigbee GPRS/GMS Wi-Fi Bluetooth
Odaklanma
Alanı İzleme ve Kontrol
Geniş alan ses
ve veri
Web, E-
posta,
Görüntü
Kablo
Yerine
Sistem
Kaynağı 4-32 Kb 16 Mb+ 1 Mb+ 250 Kb+
Ağ Boyutu 100-1000+ 1-7 0.5-5 1-7
Pil Ömrü Sınırsız 1 32 7
Ağ Veri
Genişliği 20-250 64-128+ 11000+ 720
Kapsama
Alanı 1-100+ 1000+ 1-100 1-10+
Başarı
Alanları
Dayanıklılık,
Maliyet, Güç
Tüketimi
Ulaşılabilirlik
Kalite
Hız
Esneklik
Maliyet,
Rahatlık

43
EK-4 Kontrol Devresi İçin Kaynak Kodları
////// Arduino Nem Değeri Okuma ////// void setup() { Serial.begin(9600); } void loop() { Serial.print("NEM DEGERI: "); Serial.println(analogRead(5)); delay(1000); } ////// Otomatik Vana Kontrolü ////// int led= 2; void setup() { Serial.begin (9600); pinMode (led, OUTPUT ); } void loop() { if(analogRead(5)>300) { Serial.println ("Su miktarı az"); digitalWrite (led, HIGH); delay(1000); } if(analogRead(5)>200 && analogRead(5)<300) { Serial.println ("Su miktarı normal"); delay(1000); } if(analogRead(5)<200) { Serial.println ("Su miktarı fazla"); digitalWrite (led, LOW); delay(1000); } ////// Xbee Aracılığı İle Sistemin Kontrolü ////// void setup() {

44
Serial.begin(9600); pinMode(13, OUTPUT); } void loop() { while(Serial.available()){ //is there anything to read? char getData = Serial.read(); //if yes, read it if(getData == 'a') { digitalWrite(13, HIGH); } else if(getData == 'b') { digitalWrite(13, LOW); } } }

45
EK-5 Bahçe Sulama Sistemi Projesi için Maliyet Analizi
EK-5.Çizelge 1. Oluşturulan sistemin birim maliyet analizi
Ürün Kodu
Malzeme Miktar
(ADET)
Birimi Birim Fiyatı
Tutar Kaynak GÖREVİ
DEV-11021
Arduino Uno-R3 1 ($) 29.95 29.95 SPARKFUN Sensörlerden gelen bilgileri referans
bilgilerle karşılaştırıp çıkış birimlerine
komutları gönderen denetleyicidir.
WRL-11217
XBee 2mW PCB Antenna-Series 2 (ZigBee Mesh)
2 ($) 25.95 51.9 SPARKFUN Bilgisayar ile Arduino’nun
haberleşmesini sağlar.
WRL-11373
XBee Explorer Regulated
1 ($) 9.95 9.95 SPARKFUN Arduino ile Zigbee modeminin
bağlantısını sağlar. WRL-09819
XBee Explorer doungle
1 ($) 24.95 24.95 SPARKFUN Bilgisayarımızın Zigbee modemi ile bağlantısını sağlar.
BM-019 Toprak Nemi Algılama Sensörü
1 (tl) 14.75 14.75 ROBOTİSTAN Toprak nemini ölçüp denetleyiciye
gönderir. 597 Solenoid Vana 1 (tl) 20,00 20.00 CİHAZSEPETİ Denetleyicinin veya
kullanıcının komutu ile sulama işleminin
başlatır (anahtarlama). BS-651 Bread Board 1 (tl) 5.10 5.10 ROBOTİSTAN Gerekli devre
elemanlarını birleştirmek için kullanılmıştır.
-
Saksı 2 (tl) 5,00 10.00 TÜRK TİCARET Gerekli uygulama alanı oluşturmak
- Damlama Hortumu
1 (tl) 3,00 3,00 TÜRK TİCARET Vana çıkışında bahçeye suyu
damlama ile aktarmak
-
Sulama Deposu 1 (tl) 4,00 4.00 NURMESA TİCARET
Sulama için gerekli suyun temini için
BD-657 Röle 1 (tl) 4.00 4,00 ÇAĞDAŞ ELEKTRONİK
Elektrik devre elemanı
BS-554 Flybackdiod 1 (tl) 2,00 2,00 ÇAĞDAŞ ELEKTRONİK
Elektrik devre elemanı
BC-451 12V DC Adaptör 1 (tl) 10,00 10,00 ÇAĞDAŞ ELEKTRONİK
Vana çalışma gerilimini sağlamak
TOPLAM MALİYET 317,639 TL

46
EK-6 Çalışma Takvimi
EK-6.Çizelge 1. Uzaktan kontrollü bahçe sulama sistemi projesinin çalışma takvimi ŞUBAT MART NİSAN MAYIS HAZİRAN
GEREKLİ
MALZEMENİN
TEMİNİ
ARDUNİO
PROGRAMI
YAZILMASI
PARÇALARIN
MONTAJI
TEST
AŞAMASI
BİTİRME
TEZİNİN
YAZILMASI
TEZİN
SUNUMU

47
EK-7 STANDARTLAR VE KISITLAR FORMU
Bitirme Projesinin hazırlanmasında Standart ve Kısıtlarla ilgili olarak, aşağıdaki soruları
cevaplayınız.
1. Projenizin tasarım boyutu nedir? Açıklayınız
Yapılacak olan projemizde toprak nem sensörü uygun bahçeye yerleştirilerek Zigbee ve
Ardunio ilişkilendirilir. Bu şekilde hem otomatik hem de uzaktan kontrol sağlanmış
olur.
2. Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Herhangi bir problem formüle edilmedi, fakat konuyla ilgili formüller anlaşıldı.
3. Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Yapılacak olan projede; Sinyaller ve sistemler, Elektroniğe giriş, Temel elektronik
laboratuar ve mikroişlemciler dersinde öğrenmiş olduğumuz bilgilerden faydalanıldı.
4. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
Projemiz IEEE 802.15.4 Wireless Sensor/Control Networks "ZigBee", IEEE 488 GPIB
genel amaçlı ara yüzü veri yolu, IEEE 488 GPIB Standard Digital Inter face for
Programmable Instrumentation, IEEE 829 Software Test Documentation standartlarına
uygundur.
5. Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a) Ekonomi; Projemizin kullanımı hem devlet ekonomisine hem de üretici ekonomisine
önemli ölçüde kolaylıklar sağlayacaktır.
b) Çevre sorunları: Bu konuda çevreye zarar vermeyen aksine çevreyi koruyan ve
gelişmesine katkı sağlayan bir projedir.
c) Sürdürülebilirlik: Sağlıklı şartlar sağlandığı takdirde sürdürülebilir bir projedir.
d) Üretilebilirlik: Projenin üzerinde gerekli geliştirmeler yapılarak farklı alanda
kullanımlar elde edilebilir.
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü
STANDARTLAR VE KISITLAR FORMU

48
e) Etik: Bu alanda yapılmış olan hiç bir projeden alıntı yapılmamıştır ve bilgi olarak
yararlanılan kaynaklar belirtilmiştir.
f) Sağlık: Proje uygulanabilirlik ve kullanılabilirlik açısından sağlığı olumsuz yönde
etkileyecek hiçbir unsur içermemektedir.
g) Güvenlik: Gerçekleştirilecek olan projede hiçbir güvenlik sorunu bulunmamaktadır.
h) Sosyal ve politik sorunlar: Sosyal ve politik açıdan hiçbir sorun teşkil etmemektedir.

49
ÖZGEÇMİŞLER
Halil AKYOL
Halil AKYOL 03.07.1991 tarihinde Manisa’da doğdu. İlk, ortaokul ve lise
öğrenimini Gördes’te tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi Elektrik- Elektronik Mühendisliği Bölümü'nde Lisans
Programı’na başladı. Yabancı dil olarak, İngilizce bilmektedir.
Gökhan Galip ERGÜN
Gökhan Galip ERGÜN 25.09.1991 tarihinde Trabzon'da doğdu. İlk, ortaokul ve lise
öğrenimini Trabzon'da tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi Elektrik- Elektronik Mühendisliği Bölümü'nde Lisans
Programı’na başladı. Yabancı dil olarak, İngilizce bilmektedir.
Ali Rıza ÖZKAN
Ali Rıza Özkan 25.09.1991 tarihinde Trabzon’da doğdu. İlk, ortaokul ve lise
öğrenimini Trabzon’da tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü'nde Lisans
Programı'na başladı. Yabancı dil olarak, İngilizce bilmektedir.
Ebru YAVUZ
Ebru Yavuz 25.08.1991 tarihinde Trabzon'da doğdu. İlk, ortaokul ve lise öğrenimini
Trabzon'da tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi Mühendislik
Fakültesi Elektrik- Elektronik Mühendisliği Bölümü'nde Lisans Programı’na başladı.
Yabancı dil olarak, İngilizce bilmektedir.