introducción al control automático
TRANSCRIPT

Control Automático
Ing. Roberto Rocha MSc.
UNIVERSIDAD TECNICA DEL NORTE
FACULTAD EN CIENCIAS APLICADAS
CARRERA DE INGENIERIA TEXTIL
Control Automático
Evaluación de la asignatura.
Trabajos y talleres 20%
Trabajos en grupo 20%
Evaluaciones 30%
Examen 30%

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
Las aplicaciones del control automático
en la actualidad son muy extensas,
variadas e importantes. Una de las mas
importantes es la del control de robots
manipuladores en la industria de
manufactura. Las razones principales
para este éxito es la alta calidad de
trabajo, el ahorro de tiempo y la
reducción del costo de producción.
Fig. Robots automáticos utilizados en las fabricas automóviles.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
¿QUÉ ES UN SISTEMA DE CONTROL?
Existen muchas definiciones , sin embargo el concepto que usaremos esta basado en los objetivos que se
persiguen al tratar de controlar un sistema, para que opere bajo parámetros definidos previamente.
Sistema de Control: Es el conjunto de elementos que
funcionan de manera concatenada para proporcionar una
salida o respuesta deseada.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
COMPONENTES BÁSICOS DE UN SISTEMA DE CONTROL.
Los componentes básicos de un sistema de control pueden ser descritos por un diagrama de bloques:
a. Objetivos de control.
b. Componentes del sistema de control.
c. Resultados o salida.
Los objetivos de control pueden ser identificadas como entradas o señales entrantes, los resultados son
considerados las salidas o las variables controladas; en general, el objetivo del sistema de control es controlar
la salida de manera ordenada actuando los elementos de control sobre la señal de entrada
Fig. Componentes básicos de un sistema de control.
Entrada Salida
INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
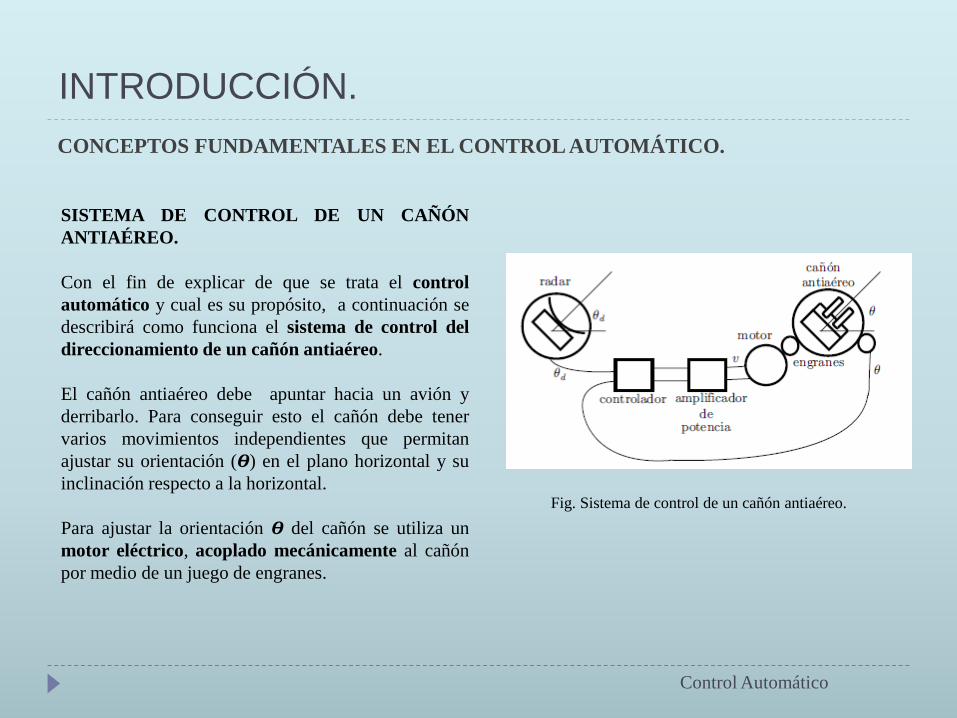
SISTEMA DE CONTROL DE UN CAÑÓN
ANTIAÉREO.
Con el fin de explicar de que se trata el control
automático y cual es su propósito, a continuación se
describirá como funciona el sistema de control del
direccionamiento de un cañón antiaéreo.
El cañón antiaéreo debe apuntar hacia un avión y
derribarlo. Para conseguir esto el cañón debe tener
varios movimientos independientes que permitan
ajustar su orientación (Ɵ) en el plano horizontal y su
inclinación respecto a la horizontal.
Para ajustar la orientación Ɵ del cañón se utiliza un
motor eléctrico, acoplado mecánicamente al cañón
por medio de un juego de engranes.
Fig. Sistema de control de un cañón antiaéreo.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN
ANTIAÉREO.
El conjunto motor-cañón funciona, de la siguiente
manera:
• Si se aplica un voltaje positivo al motor entonces
el cañón recibe un par en sentido antihorario, por
lo que el cañón tiende a moverse en sentido
antihorario.
• Si se aplica un voltaje negativo al motor entonces
el cañón recibe un par en sentido horario, por lo
que el cañón tiende a moverse en sentido horario.
• Si el voltaje que se aplica al motor es igual a
cero, entonces el par aplicado sobre el cañón es
igual a cero, por lo que el cañón tiende a
detenerse.
Fig. Sistema de control de un cañón antiaéreo.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN
ANTIAÉREO.
La posición del avión se determina mediante el uso
de un radar y se usa este dato como el valor Ɵd que
se desea alcance la orientación del cañón Ɵ.
Es decir, se desea conseguir que Ɵ=Ɵd lo más rápido
posible para, una vez conseguido esto, disparar.
Fig. Sistema de control de un cañón antiaéreo.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN ANTIAÉREO.
De acuerdo al funcionamiento descrito anteriormente, una manera
sencilla de conseguir esto es aplicando al motor un voltaje V que sea
calculado de acuerdo a la siguiente regla:
𝑽 = 𝑲𝒑 Ɵd − Ɵ (1.1)
Donde 𝑘𝑝 es una constante positiva.
La operación presentada en la formula (1.1) anterior es realizada
utilizando equipo electrónico de baja potencia (una computadora o un
microcontrolador, por ejemplo) y se debe utilizar un amplificador de
potencia para satisfacer los requerimientos del motor eléctrico.
Fig. El cañón antiaéreo siempre debe
moverse hacia la orientación deseada.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN ANTIAÉREO.
De acuerdo con la figura se pueden presentar alguna de las siguientes
situaciones:
• Si Ɵ<Ɵd , entonces 𝑽 > 𝟎 y el cañón gira en sentido antihorario de
modo que Ɵ se aproxima a Ɵd.
• Si Ɵ>Ɵd , entonces 𝐕 < 𝟎 y el cañón gira en sentido horario de
modo que Ɵ se aproxima a Ɵd.
• Si Ɵ=Ɵd , entonces 𝐕 = 𝟎 y el cañón no gira por lo que la condición
Ɵ=Ɵd se puede mantener para siempre.
A partir de este razonamiento se concluye que la regla presentada en
(1.1) para determinar el voltaje que se debe aplicar al motor tiene buenas
posibilidades de funcionar en la práctica.
A la regla (1.1) se le conoce como ley de control o, simplemente,
controlador.
Fig. El cañón antiaéreo siempre debe
moverse hacia la orientación deseada.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN ANTIAÉREO.
En la figura se muestra un diagrama de bloques de los componentes del sistema de control de un cañón antiaéreo.
Esto indica que el sistema de control compara la posición del cañón Ɵ (también conocida como salida) con la
posición deseada o referencia Ɵd para aplicar al motor un voltaje V (también conocido como la entrada) que
depende de la diferencia existente entre estas dos variables.
Fig. Diagrama de bloques del sistema de control de un cañón antiaéreo.
Este hecho define
los conceptos de
retroalimentación
y de sistema de
lazo cerrado.
INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN ANTIAÉREO.
RESPUESTA EN ESTADO ESTACIONARIO.
Se define el error de posición como la diferencia Ɵd − Ɵ, siendo el error en estado estacionario del sistema de
control de posición 0 cuando Ɵd = Ɵ, porque de acuerda a lo anteriormente explicado, Ɵd − Ɵ = 𝟎 puede
mantenerse para siempre.
Sin embargo, el termino en estado estacionario indica que esto se conseguirá cuando el tiempo sea lo
suficientemente grande como para que el cañón deje de moverse.
Así que aun queda el problema de determinar como evolucionara el movimiento del cañón conforme Ɵ se
aproxime a Ɵd .
Fig. Movimiento del cañón.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN
ANTIAÉREO.
RESPUESTA TRANSITORIA.
Al análisis de determinar como evolucionara el
movimiento del cañón conforme Ɵ se aproxime a Ɵd se
le conoce como respuesta transitoria del sistema de
control.
En la figura se muestran varios ejemplos de como puede
ser la respuesta transitoria. Si 𝑲𝒑 es grande entonces el
voltaje V que se aplica al motor es mayor por lo que el
cañón girara mas rápido. Entonces, el tiempo que debe
transcurrir para que Ɵ alcance a Ɵd será menor.
Sin embargo un movimiento rápido del cañón y la propia
inercia del mismo provocara que la velocidad del cañón
al punto de llegada sea diferente de cero por lo que el
cañón continuara oscilando alrededor de Ɵd antes de
detenerse.
Fig. Tres formas posibles de la respuesta transitoria en el
control de un cañón antiaéreo.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN
ANTIAÉREO.
RESPUESTA TRANSITORIA.
Esto significa que el valor de 𝑲𝒑 tiene un efecto
importante sobre la forma de la respuesta transitoria
por lo que debe ser calculada de modo que se
obtenga la respuesta transitoria deseada (rápida y
sin oscilaciones).
Para conseguir esto no solo es necesario ajustar el
valor de 𝑲𝒑 y se deberá utilizar otro controlador.
Fig. Tres formas posibles de la respuesta transitoria en el
control de un cañón antiaéreo.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN ANTIAÉREO.
ESTABILIDAD.
El concepto de estabilidad puede interpretarse a groso modo
recordando lo que ocurre en un péndulo simple. Si la posición deseada
del péndulo es Ɵ = 𝟎 entonces basta con dejar que el péndulo se mueva
libremente y el péndulo oscilara hasta que por efecto de la fricción,
alcanzara el reposo en Ɵ = 𝟎.
Entonces se dice que , bajo esta situación, el péndulo es estable porque
alcanza la posición deseada Ɵ = 𝟎 en estado estacionario a partir de
cualquier posición inicial suficientemente cercana.
Por otro lado si se desea que el péndulo alcance la posición Ɵ = 𝝅 es
claro que, por efecto de la gravedad, el péndulo siempre se aleja de esa
configuración por cercana que se elija la posición inicial respecto de
ese valor deseado Ɵ = 𝝅. Entonces bajo esta situación se dice que el
péndulo es inestable.
Fig. Péndulo simple.
𝜋

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
SISTEMA DE CONTROL DE UN CAÑÓN ANTIAÉREO.
ESTABILIDAD.
De acuerdo a esta descripción intuitiva, el sistema de control de un cañón antiaéreo es inestable si la ley de
control utiliza una constante𝑲𝒑 negativa: en este caso el cañón se moverá de modo que Ɵ se aleja de Ɵd .
Por lo tanto, el valor de la constante 𝑲𝒑 también determina la estabilidad del sistema de control y debe elegirse
de manera que la asegure.
Fig. Péndulo simple.
𝜋
Fig. El cañón antiaéreo siempre debe moverse hacia la
orientación deseada.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
CARACTERÍSTICAS FUNDAMENTALES DE UN SISTEMA DE CONTROL.
De acuerdo a lo anterior, se puede decir que las tres características fundamentales de un sistema de control son:
• Respuesta en estado estacionario.
• Respuesta transitoria.
• Estabilidad.
El controlador debe ser diseñado de manera que estas tres partes fundamentales de la respuesta de un sistema
de control cumplan con las especificaciones requeridas. En el caso del cañón antiaéreo rapidez y pocas
oscilaciones (respuesta transitoria), que la posición del cañón alcance la posición deseada cuando el tiempo sea
suficientemente grande ( respuesta en estado estacionario) y que el sistema de control sea estable.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
EJEMPLOS DE SISTEMAS DE CONTROL.
SISTEMA DE CONTROL DE VELOCIDAD.
La cantidad de combustible que admite la máquina se ajusta de
acuerdo con la diferencia de velocidad establecida y la velocidad
real de la máquina. El funcionamiento se describe así: el
regulador de velocidad se ajusta de manera que al alcanzar la
velocidad deseada, no fluya aceite a presión a ningún lado del
cilindro de potencia.
Si la velocidad real cae por debajo de la velocidad deseada debido
a una perturbación, la disminución de la fuerza centrífuga del
regulador de velocidad hace que la válvula de control se mueva
hacia abajo, aportando más combustible aumentando la
velocidad del motor hasta alcanzar el valor deseado,
Si la velocidad del motor aumenta por encima del valor deseado,
el incremento de la fuerza centrífuga hace que la válvula de
control se mueva hacia arriba, esto disminuye la entrega de
combustible y la velocidad del motor disminuye hasta alcanzar el
valor deseado.
Fig. Sistema de control de la velocidad.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
EJEMPLOS DE SISTEMAS DE CONTROL.
SISTEMAS DE CONTROL DE TEMPERATURA.
En la figura se muestra la arquitectura del sistema de control de temperatura de un horno eléctrico. La
temperatura se mide con un termómetro, el cual es un dispositivo analógico, esta medición se convierte en datos
digitales mediante un convertidor analógico-digital (convertidor A/D), este dato digital se introduce en el
controlador a través de una interfaz, se compara con la temperatura programada o deseada y si hay una
diferencia, el controlador (computador) envía una señal al calefactor a través de una interfaz, al amplificador y
relé para que la temperatura disminuya o aumente según sea el caso, a la temperatura deseada.
La salida del sistema es la
temperatura, el controlador es el
computador y la entrada es la
señal del termómetro.
Fig. Sistema de control de temperatura.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
EJEMPLOS DE SISTEMAS DE CONTROL.
SISTEMA DE CONTROL DE NIVEL.
Durante las horas de sol en el día la celda solar produce electricidad haciendo que opere el motor, éste hace que
la bomba succione el agua desde el pozo para llevarla hasta el reservorio ubicado en la montaña y durante las
primeras horas de la mañana, el agua es entregada por medio de un sistema de irrigación a la comunidad
Fig. Sistema de seguimiento solar para el suministro de agua.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
TIPOS DE SISTEMAS DE CONTROL
SISTEMA DE CONTROL A LAZO ABIERTO.
Es aquel sistema de control en el que la salida no es afectada por la señal de entrada. La salida no se
realimenta para compararla con la entrada.
Los elementos de un sistema a lazo abierto usualmente están divididos en dos partes, el controlador y el
proceso controlado.
Fig. Elementos de un sistema de control a lazo abierto.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
TIPOS DE SISTEMAS DE CONTROL
SISTEMA DE CONTROL A LAZO ABIERTO.
Un ejemplo práctico es una lavadora automática; el remojo, el
centrifugado y el lavado operan con una base de tiempo. La
máquina no mide la señal de salida, la limpieza de la ropa.
Otro ejemplo es el sistema de control de tráfico vehicular, éste
está basado para operar sobre un tiempo fijado, pero no mide su
respuesta que es el tráfico; sin embargo, los sistemas de control
de tráfico modernos, computarizados, pueden considerarse de
lazo cerrado: se ajustan de acuerdo al flujo de tráfico.

INTRODUCCIÓN.
CONCEPTOS FUNDAMENTALES EN EL CONTROL AUTOMÁTICO.
Control Automático
TIPOS DE SISTEMAS DE CONTROL
SISTEMA DE CONTROL A LAZO CERRADO (CONTROL REALIMENTADO).
En el sistema de control a lazo cerrado, el controlador se alimenta de la señal de error de desempeño, la cual
representa la diferencia entre la señal de entrada y la señal de realimentación con el fin de reducir el error y
llevar la salida del sistema a un valor deseado. El término lazo cerrado siempre indica una acción de control
realimentado para reducir el error del sistema.
Una de las ventajas importantes que presenta este tipo de sistema de control es que se hace insensible a las
perturbaciones y mantiene su exactitud; de la comparación de la señal realimentada y la señal de entrada resulta
la señal de error, la que es minimizada con la acción de control.
Fig. Sistema de control a lazo cerrado.

Bibliografía. V. M. Hernández Guzmán, R. Silva Ortigoza y R. V. Carrillo Serrano, Control Automático: Teoría de
Diseño, Construcción de Prototipos, Modelado, Identificación y Pruebas Experimentales. Colección
CIDETEC del Instituto Politécnico Nacional. México, DF, México, 2013.
Carrillo, A. (2011). Sistemas Automáticos de Control: Fundamentos Básicos de Análisis y Modelado. Santa
Rita: Fondo Editorial UNERMB.
Control Automático