international journal of control
TRANSCRIPT
This article was downloaded by:[Rogers, E.]On: 5 June 2008Access Details: [subscription number 793777376]Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
International Journal of ControlPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713393989
Generalized mixed-μ bounds for real and complexmultiple-block uncertainty with internal matrix structureWassim M. Haddad a; Dennis S. Bernstein b; Vijaya-Sekhar Chellaboina aa School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA,U.S.A.b Department of Aerospace Engineering, The University of Michigan, Ann Arbor, MI,U.S.A.
Online Publication Date: 01 July 1996
To cite this Article: Haddad, Wassim M., Bernstein, Dennis S. and Chellaboina,Vijaya-Sekhar (1996) 'Generalized mixed-μ bounds for real and complexmultiple-block uncertainty with internal matrix structure', International Journal ofControl, 64:5, 789 — 806
To link to this article: DOI: 10.1080/00207179608921657URL: http://dx.doi.org/10.1080/00207179608921657
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article maybe used for research, teaching and private study purposes. Any substantial or systematic reproduction,re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expresslyforbidden.
The publisher does not give any warranty express or implied or make any representation that the contents will becomplete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should beindependently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings,demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with orarising out of the use of this material.

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8
Generalized mixed-p bounds for real and complex multiple-block uncertainty with internal matrix structure
WASSIM M. HADDADTI, DENNIS S. BERNSTEIN57 and VIJAYA-SEKHAR CHELLABOINAt(1
New absolute stability results that unify and extend existing structured singular value bounds for mixed uncertainty are developed using frequency-domain arguments. These bounds generalize prior upper bounds for mixed-p by permitting the treatment of non-diagonal real uncertain blocks, as well as accounting for internal matrix structure in the uncertainty. Several specializations to well known absolute stability criteria from the classical literature are given, which allow for a systematic comparison of these results in addressing the problem of robust stability for real parameter uncertainty.
1. Introduction
The ability of the structured singular value to account for complex, real and mixed uncertainty provides a powerful framework for robust stability and performance problems in both analysis and synthesis (see Doyle 1982, Fan el al. 1991, Younger al. 1991, Packard and Doyle 1993, Safonov and Chiang 1993, and the references therein). Since exact computation of the structured singular value is, in general, an intractable problem, the development of practically implementable bounds remains a high priority in robust control research. Recent work in this area includes upper and lower bounds for mixed uncertainty (Fan et al. 1991, Lee and Tits 1991 and Young er at. 1991) as well as LMI-based computational techniques (Gahinet and Nemirovskii 1993, Boyd er a/. 1994).
An alternative approach to developing bounds for the structured singular value is to specialize absolute stability criteria for sector-bounded nonlinearities to the case of linear uncertainty. This approach, which has been explored by Chiang and Safonov (1992), Haddad and Bernstein (1991 a, 1993, 1994, 1995a, b), How and Ha11 (1993) and Haddad el al. (1994), demonstrates the direct applicability of the classical theory of absolute stability to the modern structured singular value framework. In particular, the rich theory of multiplier-based absolute stability criteria due to Lurk and Postnikov (Aizerman and Gantmacher 1964, Lefschetz 1965, Narendra and Taylor 1978, Popov 1973), Popov (1962), Yakubovitch (1965a, b), Zames and Falb (1968), and numerous others can be seen to have a close and fundamental relationship with recently developed structured singular value bounds.
Received 25 November 1994. Revised 12 July 1995. Second revision 30 October 1995. t School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA 30332-
0150, U S A . $ Tel: + l (404) 894 1078; Fax: + I (404) 894 2760; e-mail: wm.haddad@aerospace.
gatech.edu. !j Department of Aerospace Engineering, The University of Michigan, Ann Arbor, MI
48109-21 18, U.S.A. 7 Tel: + 1 (313) 764 3719; Fax: + 1 (313) 764 0578; e-mail: [email protected]. 11 Tel: + l (404) 894 3000; Fax: + 1 (404) 894 2760; e-mail: [email protected].
W2&7179/96 $12-00 Q 1996 Taylor & Fmnci~ Ltd

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 W. M . Haddad et al.
The objective of this paper is to develop new absolute stability results that unify and extend existing structured singular value bounds for mixed uncertainty. Since these results are developed for the case of linear uncertainty, the development of these results is based entirely on frequency-domain arguments. In contrast, many of the proofs of classical absolute stability criteria that address specific classes of non- linearities require the construction of specialized Lyapunov functions (Narendra and Neuman 1966, Narendra and Taylor 1978, Popov 1962, Thathachar and Srinath 1967, Thathahar et a/ . 1967, and Yakubovitch 1965a, b). The resulting simplification has already been demonstrated by Bernstein et al. (1995) with a new proof of the classical Popov criterion. The generalized absolute stability criterion given herein by Theorem I encompasses virtually all of the classical absolute stability criteria.
Theorem I provides the foundation for obtaining generalizations of existing bounds for the structured singular value. These bounds generalize prior upper bounds for mixed-p by permitting the treatment of fully populated real uncertain blocks which may, in addition, possess internal structure. Such problems arise in a variety of applications, such as the study of modal dynamics, in which transformation to 'standard' diagonal form may introduce additional conservatism, computational complexity, as well as destroying the parameter space of the original uncertainty characterization (see Example 2). The ability to address real uncertain blocks is based on the use of an appropriate class of multipliers whose structure is compatible with the real block uncertainty. Hence, choosing multipliers tailored to the structure of the uncertainty not only leads to the ability to address more general uncertainty characterizations but can also lead to less conservative stability conditions than the standard mixed-p upper bound. This more general class of multipliers, which appears in the context of the multivariable Popov criterion of Haddad and Bernstein (1991 a, 1995a), has no counterpart in Fan et a/. (1991), Young et al. (1991) or Safonov and Chiang (1993).
Although the results of the present paper address sector-bounded linear matrix uncertainty for finite-dimensional linear time-invariant systems, the present frame- work can be extended to robustness analysis using quadratic separating functions establishing a topological separation between the graph of a linear nominal system and the set of inverse graphs of all possible plant uncertainty (Megretski 1993). In this case it could be shown that the integral quadratic constraint approach for robustness analysis (Megretski 1993) can be tailored to capture internal structure in plant uncertainty.
In this paper we use the following standard notation. Let R and @ denote real and complex numbers, and let 58""" and CnXm denote real and complex n x m matrices. Let AT and A* denote the transpose and complex conjugate transpose of A. M 2 0 (M > 0) denotes the fact that the hermitian matrix M is non-negative (positive) definite. The maximum and minimum singular values of an arbitrary matrix M are denoted by o,,,(M) and o,,,(M), respectively. The hermitian and skew-hermitian parts of an arbitrary complex matrix G are defined by HeG AWG+G*) and
A ShC = $(G-G*), respectively. Finally, A @ B denotes the Kroneker product of matrices A and B.
2. Absolute stability criterion with generalized positive real stability multipliers
In this section we state and prove an absolute stability criterion for multivariable systems with generalized positive real frequency-dependent stability multipliers.
Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8
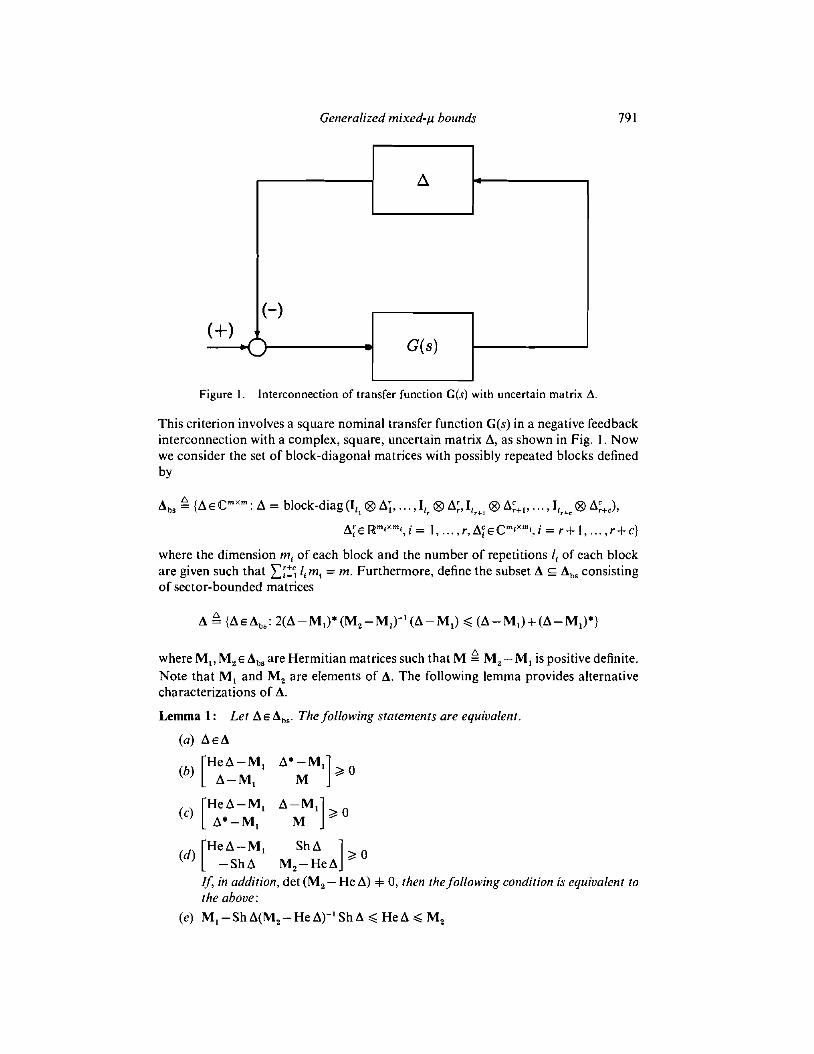
Figure I . Interconnection of transfer function C(s) with uncertain matrix A.
Generalized mixed-jt bounds
This criterion involves a square nominal transfer function G(s) in a negative feedback interconnection with a complex, square, uncertain matrix A, as shown in Fig. 1. Now we consider the set of block-diagonal matrices with possibly repeated blocks defined by
A
Ahs {A E Cmxm : A = block-diag (Il, @ A;, . . . ,I,, @ A;, I[,+, @ A;+l, . . . , I[,+< @ A;+J,
~ ~ k ? ~ ~ ~ ~ ~ , i = 1 ,..., r , A ~ ~ @ " ' i ~ ~ l , i = r + 1 , . . . , r + c )
where the dimension mi of each block and the number of repetitions 1, of each block are given such that z;:: Iimi = m. Furthermore, define the subset A G A,, consisting of sector-bounded matrices
4
where M,, M,EA,, are Hermitian matrices such that M M,-MI is positive definite. Note that MI and M, are elements of A. The following lemma provides alternative characterizations of A.
Lemma 1 : Let AE Abs. The following stafemenfs are equivalenr.
(a) AEA
He A-MI ("[ S h A M,-HeA
If, in addition, det (M, - He A) + 0, then the following condifion is equivalenf to the above:
(e) Ml-ShA(M,-HeA)-lShA < HeA < M,
G(s)

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8
Furthermore, the following statements hold:
Cf) A E A if and onlv if A* E A
(g) A = A * ~ A i f a t i d o n l y ifM, < A < M,
Proof: The proof of (a)-(d) follows from elementary congruence transformations. Statement (,f) follows from (b) and (c), and ( g ) is a direct consequence of (d).
2.1. Absol~tte stability criterion
In this subsection we prove the multivariable absolute stability criterion for sector- bounded uncertain matrices. To state this criterion, we define the sets 9 and N of hermitian frequency-dependent scaling matrix functions by
Ar g {N: jR U w + CmXm: N(jw) = N*(jw), N(jw)A = A * N ( ~ ~ ) , ~ E R , A E A , , )
Furthermore, define the set fZ" of complex multiplier matrix functions by
Note that if Z ( . ) E Y , D ( . ) E ~ and N(.)eAr, then Z(jw) = D(jw)-jN(jo) if and only if D(jw) = He Z(jw) and N(jw) = j Sh Z(jw). Hence, since D(jw) 2 0, W E R U w, Z ( , ) E Y consists of arbitrary generalized positive real functions (Anderson and Moore 1968). For A E A,,, 9 and N are given by
9 = {D: jRU co+Cmxm: D = block-diag(D, @Im,, D,@Im2, ..., D,+,QI,,+J,
0 < D, E C''X'', i = 1 ,..., r+c} (I)
N = {N: jR U w + CmXm: N = block-diag(Nl Q I,,, N, Q I,, ... , N,,, @ I,,+),
N , = N ~ E C ' ~ ~ ' ~ , N ~ Q A , = N ~ Q A ~ , ~ = ~ ,..., r+c} (2)
Remark I : Although the condition D(jw)A = AD(jw) in 9 arises in complex and mixed-p analysis (Fan et 01. 1991), the condition N(jw)A = A*N(jo) in N has no counterpart in Fan et al. (1991). As will be seen in $ 3 this condition generalizes mixed- /c analysis to address non-diagonal real matrices which are not considered in standard mixed-/c theory. The condition N(jw)A = AtN(jw) is an extension of the condition used by Haddad and Bernstein (1991 a) for Popov controller synthesis with constant real matrix uncertainty.
Next, we introduce the following key lemma.
Lemma 2: Let Z ( . ) E Y , let W E R U co, and suppose that det(I+G(jw)M,) =$ 0. If
He [Z(jo)(M-' + (I + G(ju) MI)-' G(jw))] > 0 (3)
then det (I + G(jw) A) + 0, for aN A E A,
Proof: For notational convenience we write D for D(jw) and N for N(jw). Suppose that there exists AEA such that det (1 +G(jo)A) = 0. Then there exists XEC", x .I. 0, such that (I +AG(jw))x = 0. Hence, -x = AG(jw)x and -x* = x*G*(jw)A*.
Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Generalized mixed-p bounds 793
Since 2@-MI)* M-'(A-MI) d (A-MI)* +(A-M,), it follow^ that
He [(A - MI)* M-'(A -MI) - (A -MI)*] < O
or, equivalently,
He [A*M-'A-2A*M-'MI +MI M-'M, - A* +MI] < 0 (4)
Now, since D ( . ) E ~ and MI, M,EA it follows that DM, = M, D and DM-' = M-'D. Next note that
D He [A*M-'A - 2A*M-'MI +M, M-'MI -A* +MI]
= He [A*M-'A - 2A*M-'M, + M, M-lM, - A* + M,] D
Hence forming D(4) yields
He [A*DM-1A-2A*DM-1M, +MI DM-'MI - A*D + DM,] G 0 (5)
Furthermore, forming xfG*(jw)(5)G(jw)x yields
x* He [DM-' + 2DM-'M, G(jw) + G*(jw) MI DM-'M, G(jw) + DG(jw)
+ G*(jw) DM, G(jw)] x 6 0 (6)
Next, note that He [Z(jw)(M-' +(I + G(jw) MI)-' G(jw))] > 0 is equivalent to
He [Z(jw)(M-' + G(jw)(I + M, G(jw))-'1 > 0
Now, pre- and post-multiplying the above inequality by I+Gt(jw)M, and I + MI G(jw) we obtain
He [(I + G*(jw) MI) Z(jw)(M-' + M-'MI G(jw) + G(jw))] > 0 (7)
Since N(.)E.N and M,,M,EA it follows that NM, = M, N and NM, = M, N. Thus NM = MN and hence MM-I = M-IN. By using these relations, (7) is simplified to
He [DM-' + 2DM-'M, G(jw) + G*(jw) MI DM-'MI G(jw) + DG(jw)
+ G*(jw) DM, G(jw)] > He [jNG(jw)] (8) Now forming x*(8) x yields
x* He [DM-' + 2DM-'MI G(jw) + Gt(jw) MI DM-'M, G(jw) + DG(jw)
+ G*(jw) DM, G(jw)] x > He [jxtNG(jo) x] = -x*G8(jw) He [jA*N] G(jw) x
Since N(.)E.N, it follows that He[jA*N] = L(A*N- NA) = 0 and hence 2
x* He [DM-' + 2DM-'M, G(jw) + G*(jw) M, DM-'MI G(jw)
+DG(jw)+Gt(jw) DM, G(jw)]x > 0
which contradicts (6). Consequently, det (I+G(jw)A) += 0 for all AEA. 0

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 794 W. M. Haddad et al.
We now state our main result.
Theorem 1 : Suppose thar G,(s) (I + G(s) MI)-' G(s) is asytnptoticaliy stable. Ifthere exists Z( . ) E 9 such that
for all s = jw, w e R U w , then the negative feedback ititerconnection of G(s) and A is c~symptotically stable for all AE A.
Proof: The proof follows from Lemma 2 using similar arguments as in the proof of Theorem 2.1 of Bernstein et a/. (1995). 0
3. Specialization to norm-bounded, internally block-structured uncertainty
In this section we specialize Theorem 1 to the case of norm-bounded uncertainty in order to draw connections with the structured singular value for real and complex block-structured uncertainty. Letting M, = -y-'I and M, = y-'I, where y > 0, it follows that m= 2y-'I so that M-' = tyI. The set A thus becomes
Now, AE A, if and only if a,,,(A) C y-I. Therefore, A, is given by
Now, we consider a special case of the sets A,,, 9 and JV where AeA,,. In particular, let A,, be the set of block-structured matrices with possibly repeated real scalar elements, complex scalar elements and complex blocks given by
A,, = { A E C ' " ~ ~ : A = block-diag(4 I,,, ...,& I,,; q+, I,,,,, ... ,6~+vI,r+p;A~+q+l, ..., A;+<)
6 ; ~ R , i = 1 ,..., r , & ~ @ , i = r+1, ..., r+q,df€@'fx'f,i= r + q + I , ..., r+c} (10)
Then 9 and JV are the sets of frequency-dependent positive definite and hermitian matrices, respectively, given by
92 = {D: j R u w + C m x m : D = block-diag(D,, ..., D,+v,d,+,+,I~,+,+,r ... ,d,+,I6,+J
0 < Dl E C'tX1f, i = 1 ,..., r + q , O < d , ~ k ? , i = r + q + l , ..., r+c} (11)
JV = {N: jR u a, - + C m X m : N = block-diag(N,, ... , N,,O,+,, ..., Or+,)
N l = N ~ ~ C 1 f x l r , i = l , ..., r} (12)
Note that this special case is equivalent to the mixed-p set considered by Fan el a/. (1991). Furthermore, with D ( . ) E ~ and N(.)EJV given by (1 1) and (12), respectively, the compatibility conditions required in 9 and JV are automatically satisfied for A,, given by (10).

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Generalized mixed-fi bounds 795
Alternatively, let A,, be given by (10) with the additional constraint that the complex blocks possess internal matrix structure. Then 9 and J(r are given by
9 = { D : j R u c o + C m X m : D = block-diag(D,, ..., D,,,)
0 < D, E C'ix", i = 1 ,..., r + c , D , A f = A f D , , i = r + q + l , ..., r+c)
J(r = {N: jR U cn -t Cmxm : N = block-diag (N,, . . . , N,, O,,, , . . . , O,,,, N,,,,,, . . . , N,,,)
N, = N : E C ' ~ ~ " , ~ = I, ..., r+c;N,A;= AfeN, , i= r+q+I ,..., r+c)
For example, if A,C = A;* E A,, then we can choose Dl = dl I, di E R and N, = n, I, n, E R, i = r + q + l , ..., r+c.
Next, we present a key lemma which is important in connecting the absolute stability criterion given in Theorem 1 to the mixed-p upper bounds.
Lemma 3: Let Z(.)E%, D ( . ) E ~ , N ( . ) E N , and W E R U co. Then the following statements are equivalent.
Proof: The result follows by simple algebraic manipulations.
4. Real structured singular value upper bound
We now obtain upper bounds for the structured singular value for real and complex multiple-block structured uncertainty. These bounds are based upon the absolute stability criterion of Theorem 1 for norm-bounded, block-structured, uncertain matrices. The structured singular value of a complex matrix G(jw) for mixed real and complex uncertainty is defined by (Fan et al. 199 1)
fi(G(jw)) f (min {cr,,,(A): det (I + G(jw) A) = 0))-' &Ebb%
and if det (I + G(jw) A) f. 0 for all A E A,, then p(G(jw)) A 0. Hence, a necessary and sufficient condition for robust stability of the feedback interconnection of G(s) and A is given by the following theorem.
Theorem 2: Let y > O andsuppose that G(s) is asymptotically stable. Then the negative feedback interconnection of G(s) and A is asymptotically stable for all AE A, ij and only if
Proof: Let
Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 796 W. M. Haddad et al.
where A is Hunvitz, and suppose that the negative feedback interconnection of G(s) and A given by
is asymptotically stable for all A E A,. Next, note that, for all A E A, and U E R U w
det [I+G(jw) A] = det [I+(C(jwl-A)-' B+D) A]
= det (1 + DA) det [I + (joI-A)-' BA(1 + DA)-' C]
= det (I + DA) det ( jwl - A)-' det [jwl- ( A - BA(I + DA)-' C)]
* 0
Hence by definition p(G(jw)) < y for all W E R u w. Conversely, suppose that p(G(jw)) < y for all W E R U w and assume that
is minimal. Then, by definition, det ( I + G ( w ) A) = det ( I + DA) + 0 for all A E A,. Now, suppose that there exists A E A, such that (I + G(s) A)-' G(s) is not asymptotically stable and hence A-BA(I+ DA)-'C is not Hurwitz. Since G(s) is assumed to be asymptotically stable, it follows that A is Hurwitz and thus there exists EE(O, 1) such that A-cBA(1 +&DA)-'C has an imaginary eigenvalue jw. Hence
det [ I +&G(jh) A] = det (I +EDA) det ( j h l -A)-' det [ j d - ( A -&BA(I +&DA)-' C)] = 0
However, since &A E A, it follows from the definition of p(G(jw)) that det [I +&G(j&) A] + 0, which is a contradiction. 0
Next, define p,,,(G(jw)) by
p,,,(G(jw)) A inf{y > 0 : there exists Z ( . ) ~ 2 ' s u c h that He[Z(jw)($yl+G,(jw))] > 0 )
or, equivalently, using Lemma 3
p,,,(G(jw)) = inf{y > 0 : there exist D ( . ) E ~ and N(.)EJV such that
G*(jw) DG(jw) +jy(NG(jw) - G*(jw) N ) - y2D < 0 ) (14)
To show that ~ , , ( G ( j o ) ) is an upper bound to p(G(jw)), we require the following immediate result.
Lemma 4: Let w e R U w. If there exists Z ( . ) E ~ ' such that
then y 2 p,,bS(G(j~)) and det ( I + G(jw) A) + 0 for all A E A,. Conversely, if y > pabs(G(jw)) then there exists Z(. ) E 2" such that (1 5 ) holds and det ( I + G(jw) A) + 0 for all A E A,.
Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Generalized mixed-p bounds 797
Proof: Suppose that there exists Z ( . ) E E such that (15) holds. Since p,,,(G(jw)) is the infimum over all y such that there exists Z ( , ) E E and (15) holds, it follows that y 2 p,,,(G(jw)). Conversely, suppose that y > p,,,(G(jw)). Then there exists 9 satisfying p,,,(G(jw)) < 9 < y and Z(.)E%" such that He[Z(jw)(ifI+G,(jw))] > 0. Now, using the fact that D(jw) = HeZ(jw) 3 0, it follows that
Finally, applying Lemma 2 with M-' = iyI and A = A,, it follows that de t ( l+ G(jw) A) + 0 for all A E Ay. 0
Theorem 3: Let w E R U co and let G(jw) be a complex malrix. Then
Proof: Suppose p,,,(G(jw)) < p(G(jw)) and let y > 0 satisfy p,,,(G(jw)) < y < p(G(jw)). Then, from the definition of p(G(jw)) it follows that min,,,b~{u,,,(A): det (I+ G(jw) A) = 0) < y-I. It thus follows that there exists AE A, such that det (I+ G(jw) A) = 0. However, using Lemma 4 we know that &,,(G(jw)) < y, then det (I + G(jw) A) =!= 0 for all A E A,, which is a contradiction. Hence p(G(jw)) < P%,~(~(JW)) . 0
Next, in order to provide a systematic comparison of mixed-p bounds for a fixed, internally block-structured uncertainty set A,, define p,(G(jw)) by
p,(G(jw)) 2 inf{y > 0: there exist D ( . ) E ~ [ and N ( . ) ~ & s u c h that
where .9, and A{ correspond to the pairs of frequency-dependent scaling matrix functions tailored to a fixed uncertainty structure A,,. The following result is immediate.
Lemma 5: Let G(jw) be a complex matrix and let 9 [ , 4 and g j , 4 be frequency- dependent scaling matrix sets associated with ajixed uncertainty structure A,,. Suppose gj 5 9, and 4 G 4 . Then
Proof: Suppose that pj(G(jw)) < p,(G(jw)) and let some y > 0 satisfy p,(G(jw)) < y < p,(G(jw)). Then by definition of p,(G(jw)) there exist D( .) E and N(.) E 4 such that G*(jw)DG(jw)+jy(NG(jw)-G*(jw) N)-y2D < 0. Now, since gj G 9, and 4 /t;E A(, it follows that D ( . ) E ~ , and N ( . ) E ~ and hence p,(G(jw)) < y which is a contradiction. Hence, p,(G(jw)) 4 p,(G(jw)). 0
Remark 2: Since p,,,(G(jw)) given by ( I 5) has the same form as the standard mixed- p bound (Fan et al. 1991) it is quasiconvex and hence can be set up as a generalized eigenvalue problem which can be solved using standard LMI techniques (Boyd et a/. 1994, Gahinet and Nemirovskii 1993). Furthermore, in the complex uncertainty case,

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 798 W. M . Haddad et al.
i.e. r = 0, we take D > 0 and N = 0 so that the complex-p upper bound (Doyle 1982) given by
,u,,,,(G(jw)) = inf{y > 0: there exist D ( . ) E ~ such that G*Cjw) DG(jw)- y2D < 0)
or, equivalently,
p,,,(G(jw)) = inf a,,,(D'%(jw) 0-'I2) D ( - 1 6 9
is recovered. In this case the upper bound can be computed via a convex optimization problem (Sezginer and Overton 1990).
5. Connections to classical absolute stability criteria
In this section we specialize the absolute stability criterion given in Theorem 1 to several well known versions of absolute stability criteria from the classical literature. The stability criterion of Theorem 1 with particular choices of the stability multiplier Z(s) forms the basis of classical absolute stability theory of feedback systems involving a linear time-invariant system and a memoryless (possibly time-varying) nonlinearity. Within the context of nonlinear absolute stability theory the multiplier Z(s) in (9) is crucial in distinguishing the class of allowable feedback nonlinearities.
As is well known, constructing general positive real stability multiplier para- metrization~ effectively place less restrictive conditions on the linear (nominal) part of the system, and as a result the absolute stability criterion guarantees stability for a refined class of feedback nonlinearities. For example, the case in which Z(s) = I in Theorem 1 corresponds to the classical circle criterion which applies to arbitrarily time-varying nonlinearities, while for Z(s) = I + Ns, where N is a non-negative-definite diagonal matrix, Theorem 1 yields the multivariable Popov criterion which applies to time-invariant sector-bounded nonlinearities. Classical absolute stability results extend the positive real Popov stability multiplier for sector-bounded time-invariant feedback nonlinearities to more refined classes of nonlinearities including monotonic, odd n~onotonic, and locally slope-restricted nonlinear functions. Specifically, suitable positive real stability multipliers are constructed as driving-point impedances of passive electrical networks involving resistor-inductor (RL), resistor-capacitor (RC), and inductor-capacitor (LC) combinations which exhibit interlacing pole-zero patterns on the negative real axis and imaginary axis (Brockett and Willems 1965, Haddad et a/ . 1994, Narendra and Neuman 1966, Narendra and Taylor 1978, Thathachar and Srinath 1967, Thathachar et a/. 1967, Zames and Falb 1968). For the case of linear uncertainty, Theorem 1 implies that the multiplier can be taken as a generalized positive real (but otherwise arbitrary) transfer function.
Next, we provide explicit comparisons and multivariable generalizations of some of the key stability multipliers addressed in the literature along with their ramifications for the problem of robust stability with real parameter uncertainty. In order to address the above problems we constrain A,, to the set of real diagonal uncertainties so that
A,, ={AEIW"'~~:A =diag(6,,6 , , . . . , 6,),6,~IW,i= 1 ,..., m)
Next, we define several special cases for the frequency-dependent scaling matrix functions in 9 and JV corresponding to small gain (gSg, .A&), POPOV (gP, 4) (Haddad e t a / . 1994, Haddad and Bernstein 1995a), monotonic (gItc, 4,) (Hadded e t a / . 1994, Narendra and Neuman 1966, Narendra and Taylor 1978), odd-monotonic (gX,,,,

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Generalized mixed-p bounds 799
&,,) (Haddad el 1978), generalized Thathachar et al. 1965). Specifically
al. 1994, Narendra and Neuman 1966, Narendra and Taylor odd-monotonic (BGR,,,,NGRL,) (Thathachar and Srinath 1967, 1967), and LC multipliers (gLC,NLc) (Brockett and Willems
N: W + Rmxm : N(o) = Np(o) + diag
N: R -t Rmxm: N(w) = NRc(w) + diag
J
'"' + w2(a1J - bij-qfJ) + blj qlj D: R + Rmxm : D(w) = diag (qu - 02)2 +A; o2
n(a: - w2) N: R -t Rmxm : N(w) = diag a , ,p ,~R, / l~=#O, i= 1 ,..,
Now, applying Theorem 1 with pairs of frequency-dependent scaling functions D and N from the above pairs of 9 and N yields multivariable generalizations of the corresponding absolute stability criteria for linear matrix uncertainty. Since, in this

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 800 W . M . Haddad et al.
case, the frequency-dependent scaling functions D and N and the uncertainty A are real and diagonal the compatibility assumptions discussed in $2 are automatically satisfied. It is important to note, however, that since Theorem 1 does not require that the frequency-dependent scaling matrices in D and JV be diagonal, the absolute stability criteria corresponding to the above D and N frequency-dependent scaling functions can easily be generalized to address non-diagonal linear matrix real uncertainties with appropriate compatibility assumptions. For example, in the non- diagonal multivariable Popov case, Z(s) = H + Ns, where H is a positive-definite matrix and N is a symmetric matrix. In this case D,, and Np become
which, with H = I, are precisely the conditions used by Haddad and Bernstein (1991 a, 1995a) to derive a multivariable generalization of the Popov criterion for linear matrix uncertainty using a parameter-dependent Lyapunov function approach.
Next, in order to provide a systematic comparison of the real-p bounds resulting from the above absolute stability criteria, recall the definition of p,(GCjw)) given by (17) along with Lemma 5. Here, i corresponds to p bounds predicated on fixed frequency-dependent scaling functions 3 and 4. For example, i = P corresponds to the Popov frequency-dependent scaling functions so that
pl,(G(jw)) 2 inf{y > 0: there exist D(.)€DP and N(.)sJVP such that
With the above pairs of frequency-dependent scaling functions, the following theorem is immediate.
Theorem 4: Let G(jw) be a complex matrix. Then
A G ( j 4 ) G /labB(G(~w)) < f iG*JG(~w)) < ~nLc(G(jw))
G P ~ G ( J ~ ) ) G ~p(G(jw)) G & G ( J ~ ) )
Proof: It need only be noted that Dag c BP c DR, c DRLc c D Gn,, c D and 4, c 4, c 4,c c &,,, c JVG,,, c JV. The result now is an immediate consequence of Lemma 5. 0
Similarly, for G(jw)~@~"",p(G(jw)) G p,,,(G(jw)) < pLc(G(jw)) follows from Lemma 5 by noting that DL, c D and 4, c N .
Remark 3: The benefit of considering successively more general stability multipliers is that they provide additional degrees of freedom in constructing more general parametrizations of D, N-scales in mixed-p theory. In this case, as surmised from Theorem 4, the extra degrees of freedom in the D, N-scales allows for more rapid phase variations in the frequency domain test which effectively places fewer restrictive conditions on the nominal part of the system and more restrictive conditions on the uncertainty resulting in successively tighter bounds for real parameter uncertainty. However. as noted bv Haddad and Bernstein (1995a). Haddad et al. (1994) and , . Safonov and Chiang (1993), by a priori fixing the structure of the dynamic stability multipliers or. eauivalently, the D, N-scales, within the controller synthesis framework, . . - .
eliminates the need of both iterating between controller design and optimal multiplier evaluation and curve fitting procedures.

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Generalized mixed-p bounds 80 1
6. Illustrative numerical examples In this section we consider two examples to demonstrate the utility of the
proposed generalized p-bound accounting for uncertainty with internal matrix structure. As shown in $4 this bound can be written as a generalized eigenvalue problem involving a linear matrix inequality. For the following computations we utilize the LMI Lab (Gahinet and Nemirovskii 1993) and for notational convenience we denote the p-bound given by Fan et al. (1991) by p,,,(G(jw)) and the p-bound enforcing internal matrix structure in the uncertainty by p,,,(G(jw)).
Example 1: Our first example considers real and complex uncertainty with internal matrix structure. Specifically, let
where
0.0 0.0 1.0
- 13.0 10.0 -0.8 0.6 10.0 - 10.0 0.6 -0.6
A,, = {A: A = block-diag (dl, S,, A,), 6,, 6, E R, A, = A: E CZxZ}
In order to compute p,,(G(jw)) we require
9 = {D: jR U mtIW4X4: D = block-diag(d,,d,,d31z),d,,dz,d3: jRU m + R } (19) N = {N: jR U m+R4"': N = block-diag(nl,nz,O),n,,n,: jR U w + R } (20)
while in order to enforce the hermitian structure in the complex block we choose 9 given by (19) and
N = {N: jR U m + UPx4: N = block-diag(nl, n,, n31z), n,,nz,n3: jR U m + R}
in the computation of p,,,(G(jw)). Using the above frequency-dependent scaling sets ,u,,(C(jw)) and p,,,(G(jw)) are compared in Fig. 2.
Example 2: In this example we demonstrate the effectiveness of the proposed - . generalized mixed-p bound along with the condition NA = A*Nnecessary in capturing real, internally structured full-block uncertainties. Specifically, we consider a special class of real full-block uncertainties arising in structural system in real normal form with frequency and damping uncertainty (Haddad and Bernstein 1991 b). In this case
Hence, the frequency-dependent scaling sets 52 and N are given by
Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
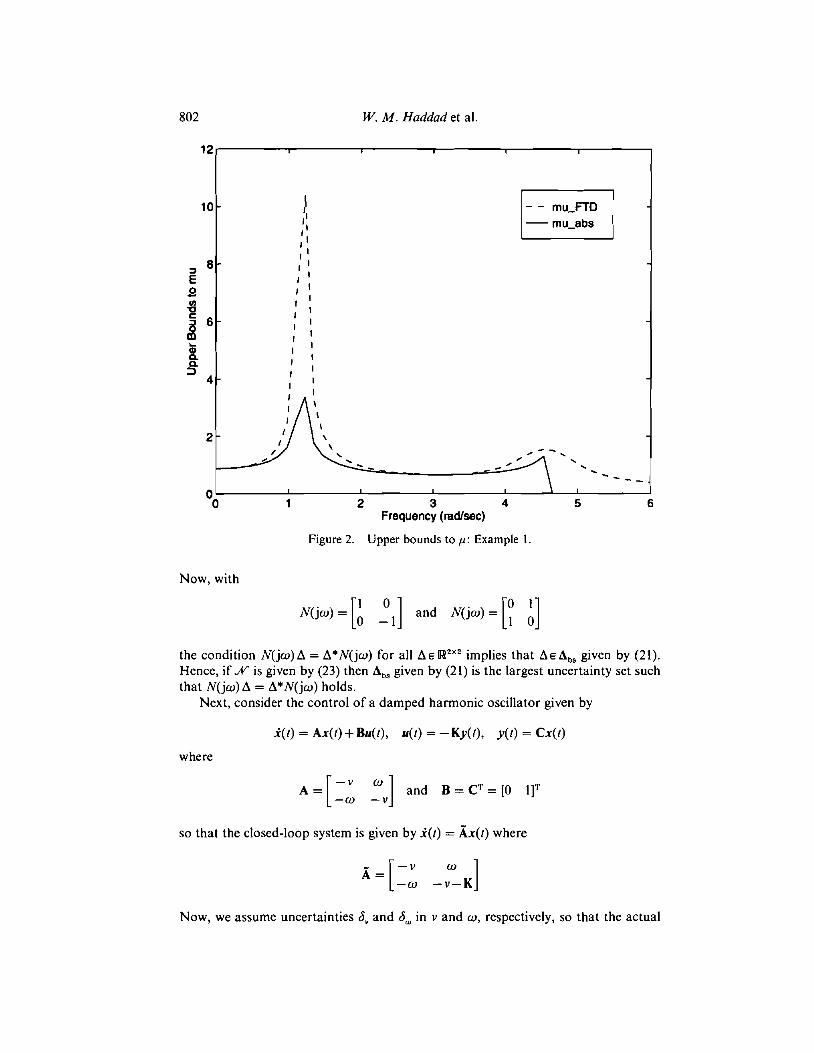
8 802 W. M . Haddad et al.
\ I
1 2 3 4 5 Frequency (radlsec)
Figure 2. Upper bounds to p : Example I .
Now, with
N ( j w ) = [ I ] and N ( j w ) = 0 -1
the condition N ( j w ) A = A*N(jw) for all A E W ~ ' implies that A E A , , given by (21) . Hence, if JV is given by (23) then A,, given by (21) is the largest uncertainty set such that N ( j w ) A = A*N(jw) holds.
Next, consider the control of a damped harmonic oscillator given by
a(?) = AX( [ ) + Bu(I), ~ ( t ) = - Ky( t ) , y ( t ) = Cx(t)
where
A = [ ' rd and B = CT = [O ,IT - w
so that the closed-loop system is given by I ( t ) = Ax( t ) where
Now, we assume uncertainties 6, and 6, in v and w , respectively, so that the actual
Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
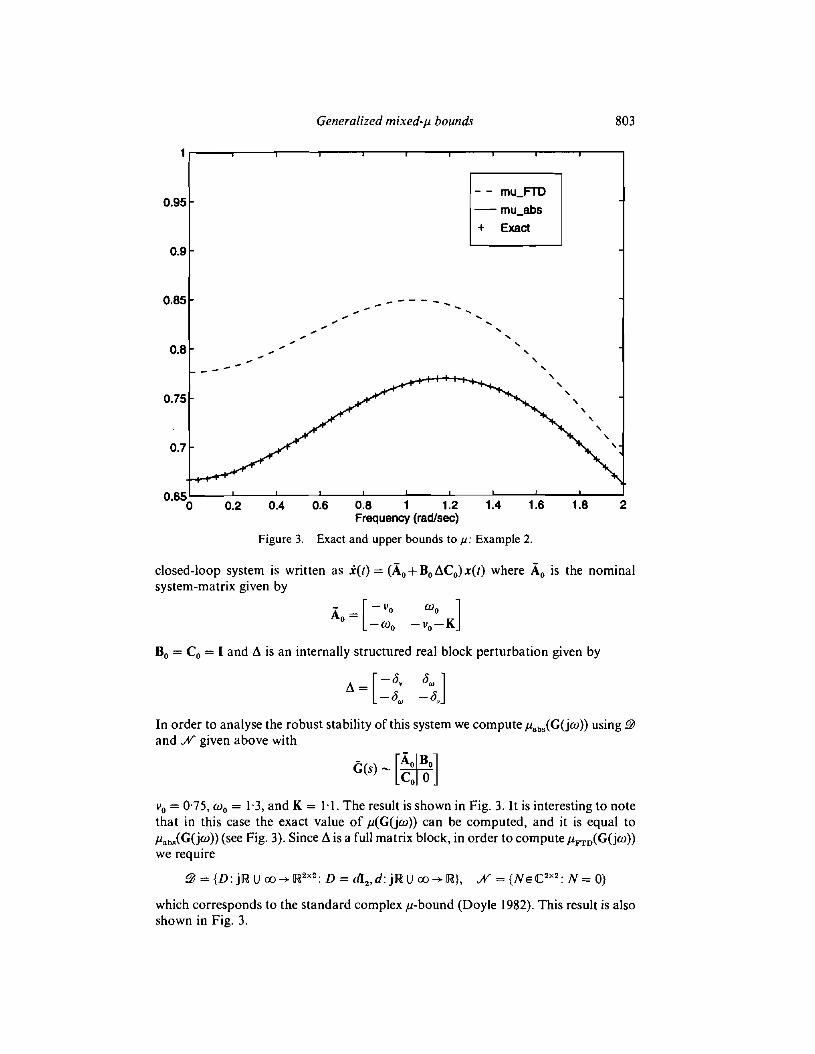
8 Generalized mixed-p bounds 803
closed-loop system is written as f(t) = (A,+B,Ac,)x(~) where A, is the nominal system-matrix given by
B, = C, = I and A is an internally structured real block perturbation given by
In order to analyse the robust stability of this system we computejiab,(G(jw)) using 9 and JV given above with
v, = 0.75, w, = 1.3, and K = 1.1. The result is shown in Fig. 3. It is interesting to note that in this case the exact value of p(G(jw)) can be computed, and it is equal to pabS(G(jm)) (see Fig. 3). Since A is a full matrix block, in order to compute p,,(G(jw)) we require
which corresponds to the standard complex p-bound (Doyle 1982). This result is also shown in Fig. 3.

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 804 W. M . Haddad et al.
-1 -0.5 0 0.5 1 Damping Uncertainly
Figure 4. Allowable uncertainty regions in Example 2: circle kb,, square p,,.
Of course, one can always represent the uncertainty as A = diag (6,,6,, 6,, 6,), by rewriting the above uncertain closed-loop system as f ( I ) = (A, + B, AC,) x(r) where
and use the mixed-p bound given by Fan er al. (1991). In this case, to analyse the robust stability of this system we compute p,,,(e(jw)) = p,,(e(jw)), where
by using the frequency-dependent scaling sets D and JV" given by
9 = {D: D = block-diag(Dl, D,), D,: jR u w + RZx2, D, 2 0, i = 1,2)
JV" = {N: N = block-diag(Nl, N,), N,: jR U w -t RZX2, Nt = N:, i = 1,2)
However, in this case the original uncertainty characterization that defines a circular parameter space is destroyed in favour of an uncertainty region defined by a square. This is shown in Fig. 4. Furthermore, the numerical complexity is increased since the new uncertainty characterization increases the overall dimensionality of the opti- mization problem. For completeness we note that in this case p,,,(G(jw)) = 0.7761 < ~ , ~ , ( e ( j w ) ) = ~ , , , ( e ( j 4 ) = 1.10 16.

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Generalized mixed-u bounds 805
7. Conclusion
A new absolute stability criterion has been developed that unifies and extendsexisting structured singular value bounds for mixed uncertainty. These boundsgeneralize prior upper bounds for mixed-a by permitting the treatment of nondiagonal real uncertain blocks which may, in addition, possess internal structure.These bounds are constructed by choosing multipliers that are tailored to the structureof the uncertainty and lead to less conservative stability conditions than the standardmixed-jz upper bound. The criterion presented in this paper virtually encompasses allof the classical absolute stability criteria for linear uncertainty and allows for asystematic comparison of these results in addressing the problem of robust stabilitywith real parameter uncertainty. The utility of the proposed generalized JL-bound wasdemonstrated through several examples.
ACKNOWLEDGMENT
This research was supported in part by the U.S. National Science Foundationunder Grant ECS-9496249and the Air Force OfficeScientific Research under GrantsF49620-92-J-0127 and F49620-96-1-0125.
REFERENCES
AIZERMAN, M. A., and GANTMACHER, F. R., 1964, Absolute Stability ofRegulator Systems (SanFrancisco, California, U.S.A.: Holden-Day).
ANDERSON, B. D.O., and MOORE, J. B., 1968, Algebraic structure of generalized positive realmatrices. SIAM Journal on Control, 6, 615-624.
BERNSTEIN, D. S., HADDAD, W. M., and SPARKS, A. G., 1995, A Popov criterion for uncertainlinear multivariable systems. Automatica, 31, 1061-1064.
BOYD, S. P., ELGHAOUI, L., FERON, E., and BALAKRISHNAN, V., 1994, Linear Matrix Inequalitiesin System and Control Theory (Philadelphia, Pennsylvania, U.S.A.: SIAM).
BROCKETT, R. W., and WILLEMS, J. L., 1965, Frequency domain stability criteria-Parts I andII. IEEE Transactions on Automatic Control, 10,255-261,407-413.
CHIANG, R., and SAFONOV, M. G., 1992, Real Km-synthesis via generalized Popov multipliers.Proc. American Control Conference, Chicago, Illinois, U.S.A., pp. 2417-2418.
DOYLE, J. C., 1982, Analysis of feedback systems with structured uncertainties. Proceedings ofthe Institution of Electrical Engineers, Pt D, 129, 242-250.
FAN, M. K. H., TITS, A. L., and DOYLE, J. C., 1991, Robustness in the presence of mixedparametric uncertainty and unmodelled dynamics. IEEE Transactions on AutomaticControl, 36, 25-38.
GAHINET, P., and NEMIROVSKll, A., 1993, LMI Lab: a Package for Manipulation and SolvingLMFs (INRIA).
HADDAD, W. M., and BERNSTEIN, D. S., 1991a, Parameter-dependent Lyapunov functions,constant real parameter uncertainty, and the Popov criterion in robust analysis andsynthesis-Parts I and II. Proceedings of the IEEE Conference on Decision and Control,Brighton, U.K., pp. 2274-2279, 2632-2633; 1991b, Robust stabilization with positivereal uncertainty: beyond the small gain theorem. Systems and Control Leiters, 17,191-208; 1993, Explicit construction of quadratic Lyapunov functions for small gain,positivity, circle, and Popov theorems and their application to robust stability, Part I:Continuous-time theory. International Journal of Robust and Nonlinear Control, 3,313-339; 1994, Explicit construction of quadratic Lyapunov functions for small gain,positivity, circle, and Popov theorems and their application to robust stability-Part II:Discrete-time theory. Ibid., 4, 249-265; I995a, Parameter-dependent Lyapunovfunctions and the Popov Criterion in robust analysis and synthesis. IEEE Transactionson Automatic Control, 40,536-543; 1995b, The octomorphic criterion for real parameter

Dow
nloa
ded
By:
[Rog
ers,
E.]
At:
17:1
6 5
June
200
8 Genernlized mixed-p bounds
uncertainty: real+ bounds without circles and D, N-scales. ~ ~ s r e t n i a n d ~ o n r r o l Lerrers, 25, 175-183.
HADDAD, W. M., How, J. P., HALL, S. R., and BERNSTEIN, D. S., 1992, Etensions of mixed-p bounds to monotonic and odd monotonic nonlinearities using absolute stability theory. Proceedings o f fhe IEEE Conference on Decision and Control, Tucson, Arizona, U.S.A., pp. 2813-2823; 1994, Extensions of mixed-p bounds to monotonic and odd monotonic nonlinearities using absolute stability theory. Internarional Journal of Control, 60, 905-95 1.
How, J. P., and HALL, S. R., 1993, Connections between the Popov stability criterion and bounds for real parametric uncertainty. Proc. American Conrrol Conference, San Francisco, California, U.S.A., pp. 1084-1089.
LEE, L., and Tlrs, A. L., 1991, Linear fractional transformations for the approximation of various uncertainty sets, in Conrrol of Uncertain Dynamic Sj~stems, edited by S. Bhattacharyya and L. Keel (CRC Press), pp. 5342 .
LEFSCHETZ, S., 1965, Srabilify of Nonlinear Control S~wtems (New York: Academic Press). MEGRETSKI, A,, 1993, Necessary and sufficient conditions ofstability: a multiloop generalization
of the circle criterion. IEEE Transacrions on Auromaric Conrrol, 38, 753-756. NARENDRA, K. S., and NEUMAN, C. P., 1966, Stability of a class of differential equations with a
single monotone nonlinearity. SIAM Journal on Conrrol, 4 , 295-308. NARENDRA, K. S., and TAYLOR, J. H., 1978, Frequency Domain Crireriafor Absolure Sfability
(New York: Academic Press). PACKARD, A., and DOYLE, J. C., 1993, The complex structured singular value. Auromarica, 29,
71-109. P o ~ o v , V. M., 1962. Absolute stability of nonlinear systems of automatic control. Automarion
and Remore Conlrol, 22,857-875; 1973, Hyperstability of Conrrol Sysrems (New York: Springer-Verlag).
SAFONOV, M. G., and CHIANG, R. Y., 1993, Real/Complex K,-synthesis without curve fitting. Conrrol and Dynamic Systems, 56, Part 2, 303-324.
SAFONOV, M . G., LY, J. H., and CHIANG, R. Y., 1993,~-synthesis robust control: what is wrong and how to fix it? Proceedings ofthe IEEE Registered Conference on Aerospace Conrrol Sysrems, Thousand Oaks, California, U.S.A.
SEZGINER, R., and OVERTON, M., 1990. The largest singular value of e X A C X isconvex on convex sets of commuting matrices. IEEE Transactiot~s on Aulomatic Control, 35, 229-230.
THATHACHAR, M . A. L., and SRINATH, M. D., 1967, Some aspects of the Lure problem. IEEE Transactions on Automaric Conrrol, 12, 451453.
THATHACHAR, M. A. L., SRINATH, M. D., and RAMAPRIGE, H. K., 1967, On a modified Lure problem. IEEE Transactions on Automatic Conrrol, 12, 731-740.
YAKUBOVITCH, V. A,, 1965a, The method of matrix inequalities in the theory of the stability of nonlinear systems, 11: Absolute stability in a class of nonlinearities with a condition on the derivative. Auromarion and Remote Control, 26, 577-592; 1965 b, Frequency conditions for the absolute stability and dissipativity of control systems with a single differentiable nonlinearity. Sovier Mathemarics, 6, 98-101.
YOUNG, P. M., NEWLIN, M . P., and DOYLE, J. C., 1991, p analysis with real parametric uncertainty. Proceedings of the IEEE Conference on Decision and Conrrol, Brighton, U.K., pp. 1251-1256.
ZAMES, G., and FALB, P. L., 1968, Stability conditions for systems with monotone and slope- restricted nonlinearities. SIAM Journal on Conrrol and Optimization, 4, 89-108.