transverse vibrations of tensioned pipes conveying fluid with time-dependent velocity
TRANSCRIPT

Journal of Sound and <ibration (2000) 236(2), 259}276doi:10.1006/jsvi.2000.2985, available online at http://www.idealibrary.com on
TRANSVERSE VIBRATIONS OF TENSIONED PIPESCONVEYING FLUID WITH TIME-DEPENDENT VELOCITY
HALI0 L RIDVAN OG Z AND HAKAN BOYACI
Department of Mechanical Engineering, Celal Bayar ;niversity, 45140, Muradiye, Manisa, ¹urkey
(Received 26 July 1999, and in ,nal form 12 January 2000)
In this study, the transverse vibrations of highly tensioned pipes with vanishing #exuralsti!ness and conveying #uid with time-dependent velocity are investigated. Two di!erentcases, the pipes with "xed}"xed end and "xed}sliding end conditions are considered. Thetime-dependent velocity is assumed to be a harmonic function about a mean velocity. Thesesystems experience a Coriolis acceleration component which renders such systemsgyroscopic. The equation of motion is derived using Hamilton's principle and solvedanalytically by direct application of the method of multiple scales (a perturbation technique).The natural frequencies are found. Increasing the ratio of #uid mass to the total mass perunit length increases the natural frequencies. The principal parametric resonance cases areinvestigated in detail. Stability boundaries are determined analytically. It is found thatinstabilities occur when the frequency of velocity #uctuations is close to two times thenatural frequency of the constant velocity system. When the velocity #uctuation frequency isclose to zero, no instabilities are detected up to the "rst order of perturbation. Numericalresults are presented for the "rst two modes.
( 2000 Academic Press
1. INTRODUCTION
Due to their technological importance, the dynamics of axially moving continua wasinvestigated by many researchers. The understanding of the vibrations of an axially movingcontinuous medium is important in the design of high-speed magnetic tapes, band-saws,power transmission chains and belts, textile and composite "bers, aerial cable tramways,paper sheets during processing, pipes and beams conveying #uid, etc. Especially, pipe linesare used in conveying gas, oil, water, dangerous liquids in chemical plants, cooling water innuclear power plants, and in many other places. The vibrations occur due to many reasons.They are caused by compressors, ventilators, electrical power engines or internalcombustion engines and also by valves, elbows, ori"ces, transition parts and abrupt areacontractions. If these oscillations are not prevented, they can result in leakage, hazards andaccidents. Ulsoy et al. [1] and Wickert and Mote [2] reviewed the relevant work up to 1978and 1988 respectively. Older studies concentrated on the axial velocity-dependent naturalfrequency and existence of divergence instability at the critical velocity [3}6]. The naturalfrequencies decrease with increasing transport speed, and the translating continuaexperience divergence instability at a critical speed. The eigenfunctions are complex andspeed-dependent due to a convective acceleration component in the equations of motion.The phases of the natural oscillations are not constant and propagate upstream at the phasepropagation velocity. The periodic variation of total mechanical energy was studied [7],and also "rstly, Miranker [8] derived the equations of motion for time-dependent axialvelocity by using variational procedure. Wickert and Mote [9] showed that the energy #uxat a "xed support is the product of the string tension and the convective component of
0022-460X/00/370259#18 $35.00/0 ( 2000 Academic Press
260 H. R. OG Z AND H. BOYACI
a velocity. They [10] also investigated the transverse vibrations by complex modal analysis.An analogous case with a similar equation of motion exists in highly tensioned pipesconveying #uid with negligible #exural sti!ness and #uid pressure e!ect. Wickert [11]analyzed free non-linear vibration of an axially moving, elastic, tensioned beam oversub- and supercritical speed ranges. Pakdemirli et al. [12] re-derived the equations ofmotion for an axially accelerating strip using Hamilton's principle and numericallyinvestigated the stability of the response using Floquet theory. Pakdemirli and Batan [13]analyzed the constant acceleration-type motion. Pakdemirli and Ulsoy [14] obtainedapproximate analytical solutions by using the method of multiple scales and showed thatdirect-perturbation yields better results for higher order expansions with respect to thediscretization-perturbation method. The direct-perturbation method does not requiretransformation of the equations or the selection of an orthogonal basis. The authors alsoinvestigated principal parametric resonances and combination resonances for any twomodes for an axially accelerating strip. OG z et al. [15] studied the transition behaviour fromstring to beam for an accelerating material and presented an approximate analyticalexpression for the natural frequency and determined stability borders for variable velocityand studied principal parametric resonance case. OG z and Pakdemirli [16] investigated thetransverse vibrations of an axially accelerating beam with simple supports. They consideredsix di!erent #exural sti!ness coe$cients and solved the equations of motions by using themethod of multiple scales and studied principal parametric resonances and combinationresonances. They found that for velocity #uctuation frequency nearly twice any naturalfrequency, an instability region occurs whereas for the frequencies close to zero, noinstabilities were detected. For combination resonances, instabilities occurred only for thoseof additive type. No instabilities were detected for di!erence-type combination resonancesin agreement with references [14}16]. OG z et al. [17, 18] investigated linear and non-linearvibrations and performed a stability analysis.
Up to now in the studies related to #uid #ow, the velocity was assumed as constant.Benjamin [19] neglected #uid friction e!ects. Nemat-Nasser et al. [20] and Gregory andPaidoussis [21] found the destabilizing e!ect of dissipation in a cantilevered, fourth orderbeam conveying #uids. Paidoussis and Li [22] and Lee and Mote [23, 24] neglected gravityand pressure e!ects. In references [23, 24] the energetics of translating one-dimensionaluniform strings, highly tensioned pipes with vanishing bending sti!ness and tensionedbeams and #owing #uid are analyzed for "xed, free and damped boundary conditions. The#uid velocity was assumed to be constant. Natural frequencies are found by usingphase-closure principle. It was found that the energies transferred at the di!erent boundarysupports were quanti"ed by energy re#ection coe$cients which were determinedcompletely by the boundary conditions.
In this study, the transverse vibrations of highly tensioned pipes conveying #uid areinvestigated. The pipe is assumed to have negligible #exural sti!ness and it can be thoughtof as a string conveying #uid. A harmonically varying velocity function is chosen for the#uid #ow. The ends of the pipe are on "xed supports in the "rst case and on "xed}slidingsupports in the second case. The linear equations of motion are derived by using Hamilton'sprinciple and solved analytically by means of direct application of the method of multiplescales. The natural frequencies are found analytically depending on #uid velocity and ratioof #uid mass to total mass per unit length and are calculated for the "rst two modes.Increasing the ratio of #uid mass to the total mass per unit length increases the naturalfrequencies. The natural frequencies for "xed}sliding tensioned pipe are lower than those of"xed}"xed tensioned pipe. The stability boundaries are determined analytically forprincipal parametric resonances. For velocity #uctuation frequency nearly twice anynatural frequency, an instability region occurs whereas for frequencies close to zero, no

TENSIONED PIPES CONVEYING FLUID 261
instabilities are detected up to the "rst order of approximation. The stability borders shift tohigher velocity #uctuation frequency values for the two cases. Stable}unstable regions shiftto relatively lower velocity #uctuation frequency values for "xed}sliding end conditionscompared with "xed}"xed end conditions.
2. EQUATIONS OF MOTION
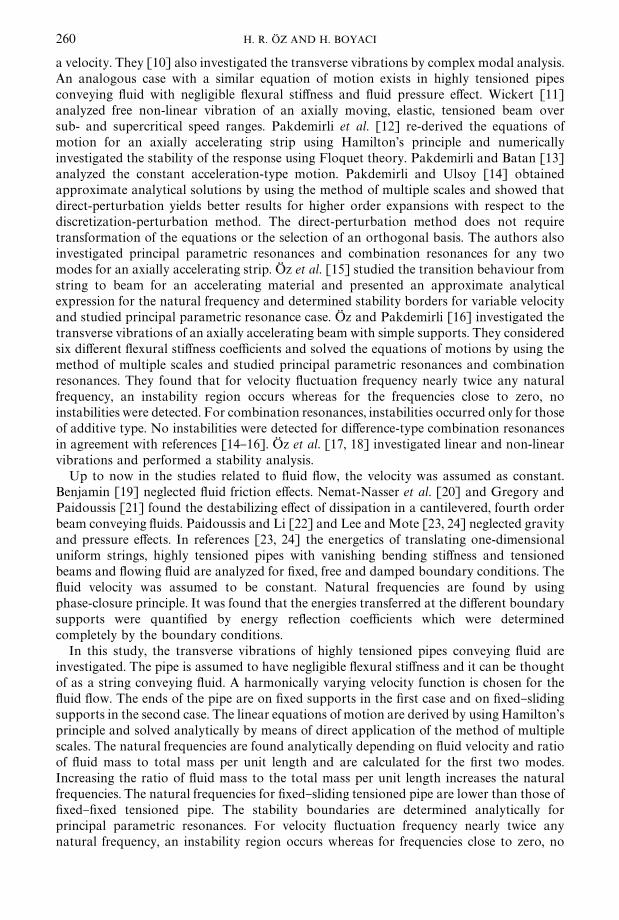
For the "xed}"xed and "xed}sliding tensioned pipes conveying #uid in Figures 1(a) and1(b), x* and z* are the spatial co-ordinates, u* and w* are longitudinal and transversedisplacements respectively. t* is variable #uid velocity, o
fis the #uid density, A
fand A
pare
the cross-sectional areas of the pipe and #ow and assumed to be constant. Tension force inthe pipe is P(t*). The length is ¸. The modulus of elasticity of the pipe is E
p. The transverse
displacement is assumed to be small compared with span ¸ and the tension force is assumedto be su$ciently large compared with the e!ects arising from elongation. The extensionalsti!ness is su$ciently large so that the longitudinal deformation resulting from thepretension is negligible. Variation of cross-sectional dimensions during vibration is notconsidered. In this study sub-critical region is considered. If gravity, pressure and #uidfriction e!ects, and restoring #exural forces are neglected, then a pipe conveying #uid isconsidered to be a string conveying #uid. Let us denote the time by t*, the derivatives withrespect to the spatial variable by ( )@ and the derivatives with respect to time by ( > ). Sinceonly linear analysis is made the non-linear strains deriving from u* and w* are negligible. Sothe strain in the pipe is approximately
e+u*{, (1)
The total kinetic energy of the system is
¹"
1
2ofA
f PL
0
[(t*#uR *#u*{t*)2#(wR *#w*{t*)2] dx*#1
2opA
pPL
0
w5 *2dx*, (2)
where the "rst term denotes the kinetic energies of the #uid in the x* and z* directions, thelast term is the kinetic energy of the pipe in the z* direction. The elastic potential energy ofthe system
;"
1
2EpA
p PL
0
e2dk*#PL
0
Pedx* (3)
relative to equilibrium derives from extension. The "rst term is the elastic potential energyof the pipe due to elongation, and the second term is due to the tensile force. TheLagrangian of the system is
@"¹!;. (4)
The Hamilton's principle is
d Pt*2
t *1
@ dt*"0. (5)
Substituting equation (1) into equation (3), and then substituting equations (2) and (3) intoequation (4), and applying Hamilton's principle (5), the equations of motion for the
Figure 1. Schematics of second order translating continua in a tensioned pipe (a) with "xed}"xed supports, (b)with a sliding end at x"¸.
262 H. R. OG Z AND H. BOYACI
transverse vibration and the boundary conditions are derived:
wK *#ofA
fofA
f#o
pA
p
(2w5 *{t*#w*{tQ *#w*{{t*2)"0, (6)
w* (0, t*)"w* (¸, t*)"0 (7)
for "xed}"xed tensioned pipe. Following a similar way the boundary conditions for"xed}sliding pipe can be expressed as
w* (0, t*)"w*{ (¸, t*)"0 (8)
The following parameters are introduced to non-dimensionalize equations (6)}(8):
w"
w*
¸
, u"u*
¸
, x"x*
¸
, t"1
¸SP
ofA
f
t* (9)
and the #uid velocity is non-dimensionalized by the critical #ow velocity at which the pipesystem experiences divergence instability
t"t*
JP/ofA
f
. (10)
One obtains non-dimensional linear equations of motion for the transverse vibration
wK#b (2w5 @t#w@tQ #(t2!1)w@@)"0 (11)
with solutions satisfying the end conditions
w (0, t)"w (1, t)"0 (12)
TENSIONED PIPES CONVEYING FLUID 263
for "xed}"xed tensioned pipe. Following a similar way the boundary conditions for"xed}sliding pipe can be expressed as
w (0, t)"w@ (1, t)"0 (13)
and the ratio of the #owing #uid mass to the total mass per unit length is de"ned as
b"ofA
f(o
fA
f#o
pA
p). (14)
Several cases can be discussed for restricted parameter values. First, for the limiting caseb"1 the equation of motion for a travelling string with variable velocity is obtained asa special case of the second order #uid}pipe system. Second, for a stationary #uid, b"1 andt"0, the equation for linear stationary string is obtained. In equation (11) wK and 2w5 @tdenote local and Coriolis accelerations, respectively, tQ denotes variable #uid velocity, andt2w@@ denotes centrifugal acceleration.
3. APPROXIMATE SOLUTION
Assuming that the velocity is harmonically varying about a constant mean velocity t0,
one writes
t"t0#et
1sinXt, (15)
where e is a small parameter and et-is also small, represents the amplitude of #uctuations.
X is the #uctuation frequency. Substituting equation (15) into equation (11) and keepingterms up to the "rst order of approximation, one has
wK#2bw5 @t0#b (t2
0!1)w@@#eb (t
1X cosXt w@#2t sin Xt w5 @#2t
0t1sinXt w@@)"0. (16)
Direct-perturbation method will be applied to equation (16) in search of solutions. Usingthe method of multiple scales (a perturbation technique) [25, 26] and assuming a "rst orderexpansion, one writes
w (x, t; e)"w0(x,¹
0,¹
1)#ew
1(x,¹
0,¹
1)#2, (17)
where w0
and w1
are the displacement functions at orders 1 and e,¹0"t and ¹
1"et are
the usual fast and slow time scales respectively. Now the time derivatives can be written as
d
dt"D
0#eD
1#2,
d2
dt2"D2
0#2eD
0D
1#2, (18)
where (Di"L/L¹
i). Substituting equations (17) and (18) into equation (16) and separating
each order of approximation, one obtains
O(1) D20w0#2t
0bD
0w@
0!b (1!t2
0)w@@
0"0, (19)
O(e) D20w
1#2bt
0D
0w@
1!b(1!t2
0)w@@
1"
!2D0D
1w
0!2bt
0D
1w@
0!2bt
1sinX¹
0D
0w@0
(20)
!2bt0t1sinX¹
0w@@
0!bt
1X cosX¹
0w@0.

264 H. R. OG Z AND H. BOYACI
The solution of equation (19) can be written as follows:
w0(x,¹
0,¹
1)"eu
n¹
0>n(x)#cc, (21)
where n is mode number, un
is natural frequency and cc stands for complex conjugate.Substituting equation (21) into equation (19) one obtains
b (1!t20)>@@
n!2bt
0u
n>@
n!u2
n>
n"0. (22)
The solution of equation (22) is
>n(x)"C
1nek
1x#C
2nek
2x , (23)
where k is wave number. Substituting equation (23) into equation (19), one obtainsdispersive relation for the tensioned pipe conveying #uid
b (1!t20)k2
j!2t
0bu
nkj!u2
n"0, j"1, 2. (24)
Solving the polynomial (24) in terms of kjand de"ning k
u"k
1and k
d"!k
2,
kd"
un
bt0#Jb2t2
0#b(1!t2
0), k
u"
un
bt0#Jb2t2
0#b (1!t2
0), (25)
the downstream and upstream wave numbers, respectively, are found. The denominators ofequation (25) are downstream and upstream phase velocities. Substituting equations (23)and (25) into equation (21) and applying "xed}"xed end conditions (12) one obtains
C2n"!C
1n, e!k
d"eku. (26)
In equation (26), !kd"k
uis trivial solution. For non-trivial solution the wave numbers
must be complex:
kd"ikM
d, k
u"ikM
u, (27)
where i denotes complex number J!1, kMdand kM
uare real parts of assumed wave numbers
and the following relationship should hold,
kuM"!kM
d#2nn (28)
to satisfy e!kd"ek
u condition, and of course from equation (25) the assumed naturalfrequency must be complex:
un"iu6
n. (29)
Substituting equations (27) and (29) into equation (25) and then together into equation (28),the natural frequency equation for "xed}"xed tensioned pipe conveying #uid is obtained as
u6n"
nnb (1!t20)
Jb2t20#b (1!t2
0), n"1, 2, 3,2 . (30)

TENSIONED PIPES CONVEYING FLUID 265
Following a similar derivation for "xed}sliding tensioned pipe conveying #uid, therelationship between wave numbers is obtained as
kMu"!kM
d#2An!
1
2Bn, n"1, 2, 3,2 (31)
and the natural frequency equation is obtained as
u6n"
(n!12)nb (1!t2
0)
Jb2t20#b (1!t2
0), n"1, 2, 3,2. (32)
Combining equations (25), (27), (29), and (30) for "xed}"xed tensioned pipe and equation(32) for "xed}sliding tensioned pipe and substituting into displacement function (16), oneobtains
w0"C
neiu6
n¹
0 (e!ikMddx!eikM
ux )#cc (33)
for "xed}"xed and "xed}sliding tensioned pipes conveying #uid with related naturalfrequencies and wave numbers. Substituting equation (33) into order e equation one obtains
D20w1#2bt
0D
0w@
1!b(1!t2
0)w@@
1"
!2D1C
n(iu6
n>
n#bt
0>@
n) eiuN
n¹
0#2D1CM
n(iu6
n>
n!bt
0>M @
n) e!iuN
n¹
0
!uNnbt
1[C
n>@
n(ei(uN
n#X)¹
0!ei(uNn!X)¹
0!CMn>M @
n(ei(X!uN
n)¹
0!ei(uNn#X)¹
0)] (34)
!ibt0t1[C
n>@@
n(ei(uN
n#X)¹
0!ei(uNn!X)¹
0)#CMn>M @@
n(ei(X!uN
n)¹
0!ei(uNn#X )¹
0)]
!
Xbt1
2[C
n>@
n(ei(uN
n#X)¹
0#ei(uNn!X)¹
0#CMn>M @
n(ei(X!uN
n)¹
0#e!i (un#X)¹
0 )].
In the next section three di!erent cases will be discussed for the "xed}"xed and"xed}sliding tensioned pipes.
4. PRINCIPAL PARAMETRIC RESONANCES
4.1. X IS AWAY FROM 2u6n
AND 0
In this case, for "xed}"xed end conditions, equation (34) becomes
D20w1#2bt
0D
0w@1!b (1!t2
0)w@@
1"!2D
1C
n(iu6
n>
n#bt
0>@
n) eiuN
n¹
0#cc#NS¹, (35)
where cc and NS¹ stand for complex conjugates and non-secular terms respectively. Thesolution of equation (35) is as follows:
w1(x,¹
0,¹
1)"/
n(x,¹
1) eiuN
n¹
0#= (x,¹0,¹
1)#cc. (36)
The "rst term is related to secular terms and the second term is related to non-secular terms.If equation (36) is substituted into equation (35), /
nsatisfy the equations
b (1!t20)/@@
n!2it
0bu6
n/@
n#u6 2
n/
n"2D
1C
n(iuN
n>
n#bt
0>@
n), (37)
/n(0)"0, /
n(1)"0. (38)

266 H. R. OG Z AND H. BOYACI
The solvability condition requires (see reference [25] for details of calculating solvabilityconditions)
D1C
n"0. (39)
This means a constant amplitude solution up to the "rst order of approximation
Cn"C
0. (40)
Following a similar way one obtains the solvability condition for "xed}sliding pipe as
D1C
n"0. (41)
This means a constant amplitude up to the "rst order of approximation
Cn"C
0. (42)
4.2. X IS CLOSE TO 0
For this case, the nearness of #uctuation frequency to zero can be expressed as
X"ep, (43)
where p is the detuning parameter. Substituting equations (33) and (43) into equation (34),the order e equation is obtained as
D20w1#2t
0bD
0w@1!b (1!t2
0)w@@
1
"M!2D1C
n(iuN
n>
n#bt
0>@
n)!uN
nbt
1C
n>@
n(eip¹
1!e!ip¹1) (44)
#ibt0t1C
n>@@
n(eip¹
1!e!ip¹1)!
Xbt1
2C
n>@
n(eip¹
1#e!ipu¹1 )H
iuNn¹
n
#cc#NS¹.
Following a similar way to that in section 4.1 the solvability condition for "xed}"xed and"xed}sliding tensioned pipes is obtained as
D1C
n#(k
1cosp¹
1#k
2sinp¹
1)C
n"0, (45)
where
k1"
Xbt1 P
1
0
>@n>M
ndx
2Aiu6 n P1
0
>n>M
ndx#bt
0 P1
0
>@n>M
ndxB
,
k2"
u6n P
1
0
>@n>M
ndx#t
0 P1
0
>@@n>M
ndx
iuNn P
1
0
>n>M
ndx#bt
0 P1
0
>@n>M
ndx
i bt1.
(46)

TENSIONED PIPES CONVEYING FLUID 267
The solution of equation (45) is
Cn"C
0e(!(k
1/p) sinp¹
1#(k
2/p) cosp¹
1) (47)
Since !1)sin p¹1)!1 and !1)cosp¹
1)1, there is no instability up to O(e).
4.3. X IS CLOSE TO 2u6n
The nearness of #uctuation frequency to twice any natural frequency can be expressed as
X"2uNn#ep. (48)
Substituting equations (33) and (43) into equation (34) the order e equation for "xed}"xedand "xed}sliding tensioned pipes conveying #uid is obtained as
D20w1#2t
0bD
0w@1!b (1!t2
0)w@@
1
"G!2D1C
n(iuN
n>
n#bt
0>@
n)
#CMnbt
1eip¹
1AAuN n!X2 B>M @n#it
0>@@
n BH#cc#NS¹, (49)
where CMnis the complex conjugate of amplitude C
n. The solvability condition for this case is
D1C
n#k
0CM
neip¹
1"0, (50)
where
k0"
12(X!2uN
n)P
1
0
>M @n>M
ndx!it
0 P1
0
>M @@n>M
ndx
2Aiu6 nP1
0
>n>M
ndx#bt
0P1
0
>M @n>M
ndxB
bt1. (51)
The solution of equation (50) is assumed as
Cn"B
neip¹
1/2 , CM
n"BM
neip¹
1/2 (52)
Substituting equation (52) into equation (50), one obtains
D1B
n#
ip2
Bn#k
0BMn"0, (53)
where complex amplitudes are
Bn"b
nej¹
1, BMn"bM
nej¹
1 (54)
and bn"bR
n#ibI
n, k
0"kR
0#ikI
0where R and I denote real and imaginary parts
respectively. Substituting equation (54) into equation (53) and separating real and
268 H. R. OG Z AND H. BOYACI
imaginary parts, one obtains the matrix equation
j#kR0
kI0!
p2
kI0#
p2
j!kR0GbRn
bInH"G
0
0H . (55)
For non-trivial solution, the determinant of the coe$cient matrix must be zero. This impliesthat
j"G
1
2J!p2#4 (kR2
0#kI2
0) . (56)
Stable solution requires j"0. Then the stability boundaries can be written as
p"G2 JkR2
0#kI2
0. (57)
Substituting equation (57) into equation (48) the stability regions can be expressed as
X"2uNnG2eJkR2
0#kI2
0. (58)
The numerical solution for the two pipes will be given in the next section. The solutions di!erin the integrals since the shape functions and natural frequencies are di!erent for the two pipes.
5. NUMERICAL ANALYSIS
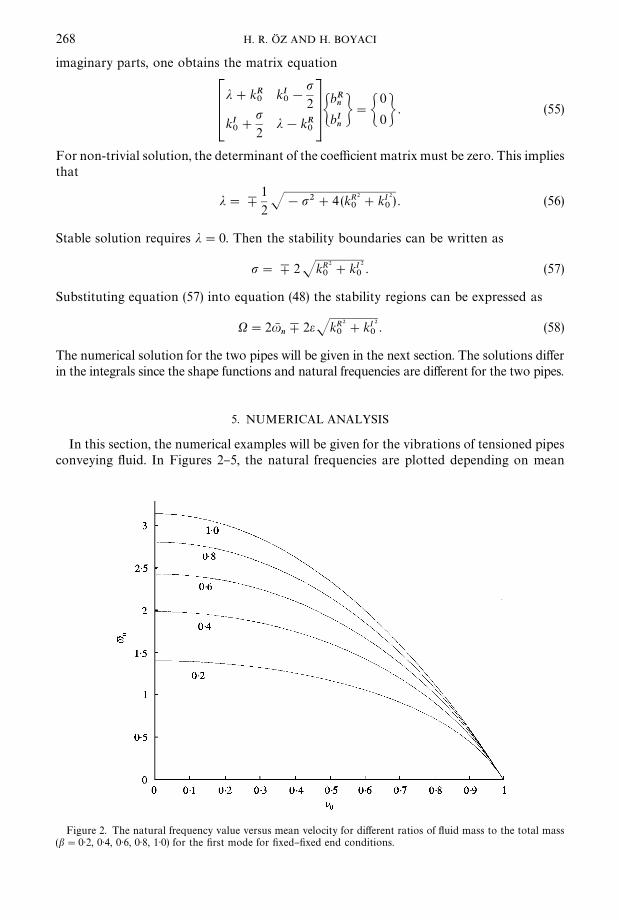
In this section, the numerical examples will be given for the vibrations of tensioned pipesconveying #uid. In Figures 2}5, the natural frequencies are plotted depending on mean
Figure 2. The natural frequency value versus mean velocity for di!erent ratios of #uid mass to the total mass(b"0)2, 0)4, 0)6, 0)8, 1)0) for the "rst mode for "xed}"xed end conditions.
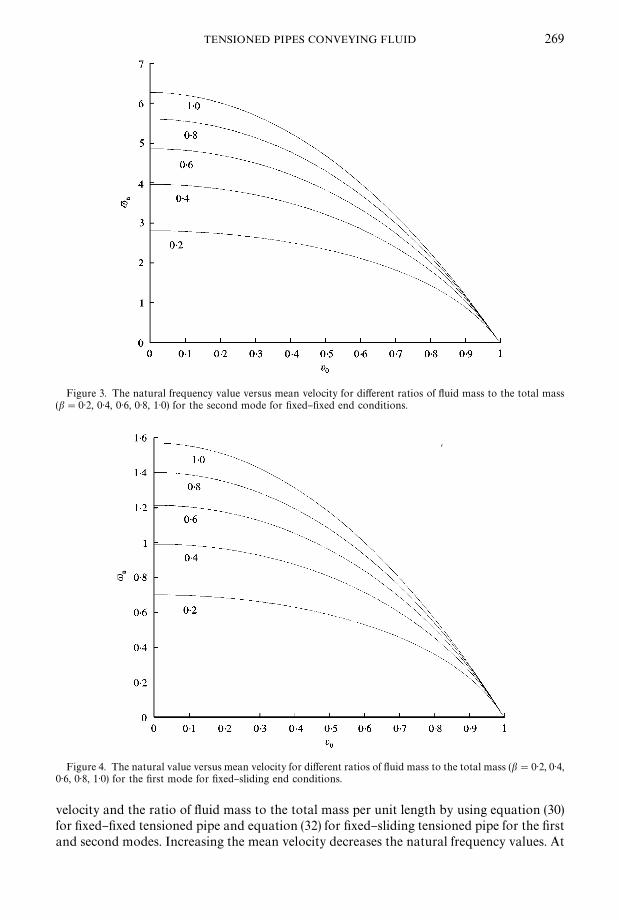
Figure 3. The natural frequency value versus mean velocity for di!erent ratios of #uid mass to the total mass(b"0)2, 0)4, 0)6, 0)8, 1)0) for the second mode for "xed}"xed end conditions.
Figure 4. The natural value versus mean velocity for di!erent ratios of #uid mass to the total mass (b"0)2, 0)4,0)6, 0)8, 1)0) for the "rst mode for "xed}sliding end conditions.
TENSIONED PIPES CONVEYING FLUID 269
velocity and the ratio of #uid mass to the total mass per unit length by using equation (30)for "xed}"xed tensioned pipe and equation (32) for "xed}sliding tensioned pipe for the "rstand second modes. Increasing the mean velocity decreases the natural frequency values. At
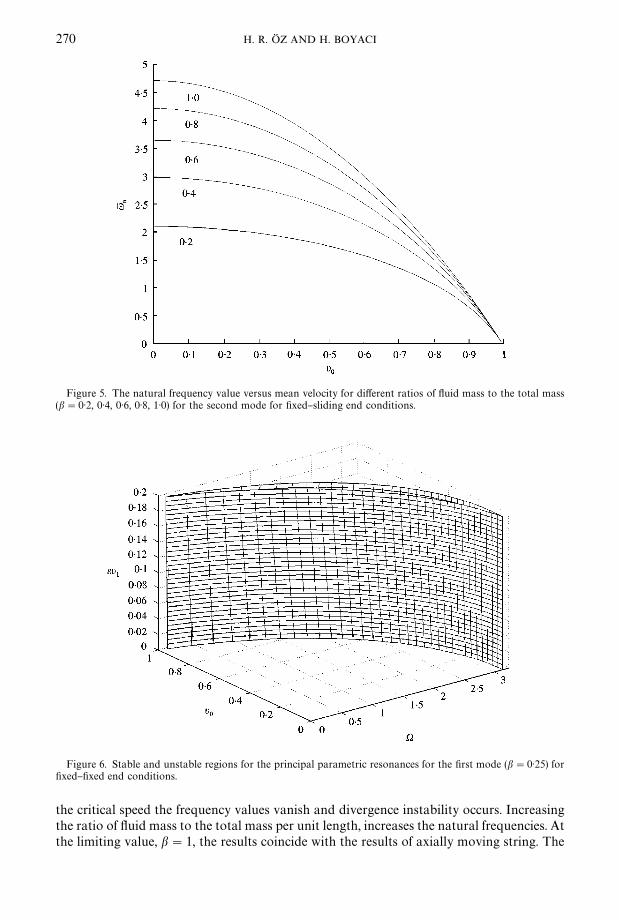
Figure 5. The natural frequency value versus mean velocity for di!erent ratios of #uid mass to the total mass(b"0)2, 0)4, 0)6, 0)8, 1)0) for the second mode for "xed}sliding end conditions.
Figure 6. Stable and unstable regions for the principal parametric resonances for the "rst mode (b"0)25) for"xed}"xed end conditions.
270 H. R. OG Z AND H. BOYACI
the critical speed the frequency values vanish and divergence instability occurs. Increasingthe ratio of #uid mass to the total mass per unit length, increases the natural frequencies. Atthe limiting value, b"1, the results coincide with the results of axially moving string. The
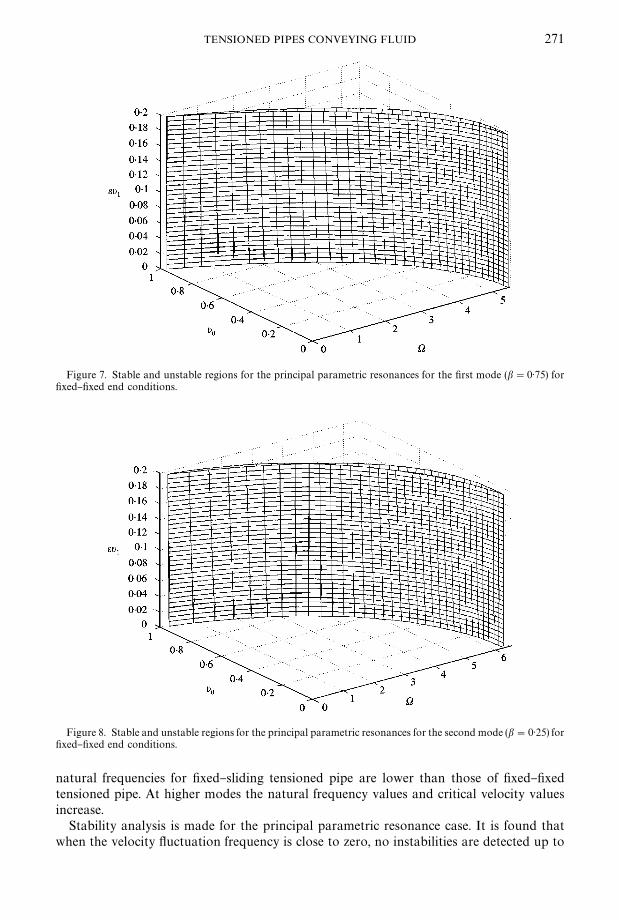
Figure 7. Stable and unstable regions for the principal parametric resonances for the "rst mode (b"0)75) for"xed}"xed end conditions.
Figure 8. Stable and unstable regions for the principal parametric resonances for the second mode (b"0)25) for"xed}"xed end conditions.
TENSIONED PIPES CONVEYING FLUID 271
natural frequencies for "xed}sliding tensioned pipe are lower than those of "xed}"xedtensioned pipe. At higher modes the natural frequency values and critical velocity valuesincrease.
Stability analysis is made for the principal parametric resonance case. It is found thatwhen the velocity #uctuation frequency is close to zero, no instabilities are detected up to
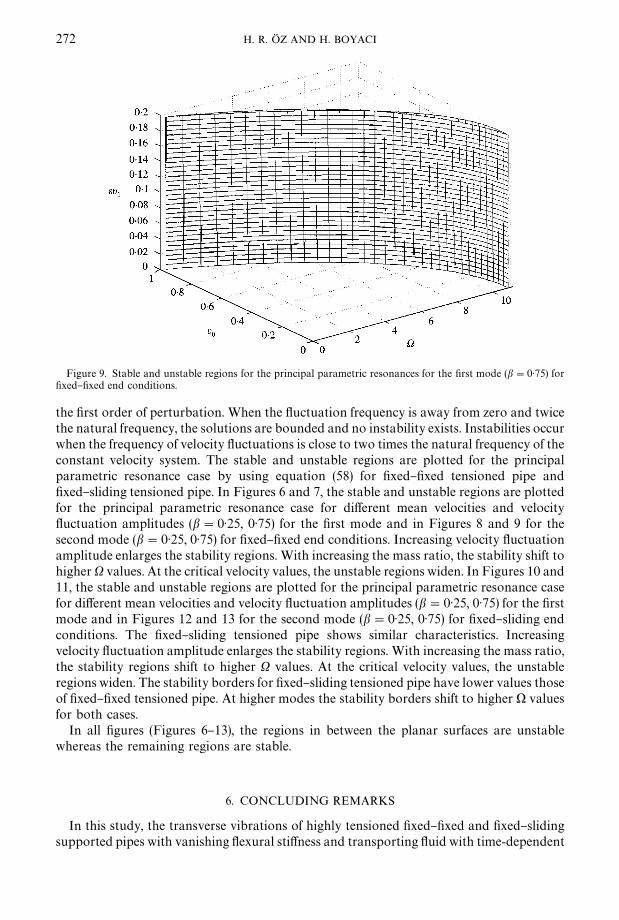
Figure 9. Stable and unstable regions for the principal parametric resonances for the "rst mode (b"0)75) for"xed}"xed end conditions.
272 H. R. OG Z AND H. BOYACI
the "rst order of perturbation. When the #uctuation frequency is away from zero and twicethe natural frequency, the solutions are bounded and no instability exists. Instabilities occurwhen the frequency of velocity #uctuations is close to two times the natural frequency of theconstant velocity system. The stable and unstable regions are plotted for the principalparametric resonance case by using equation (58) for "xed}"xed tensioned pipe and"xed}sliding tensioned pipe. In Figures 6 and 7, the stable and unstable regions are plottedfor the principal parametric resonance case for di!erent mean velocities and velocity#uctuation amplitudes (b"0)25, 0)75) for the "rst mode and in Figures 8 and 9 for thesecond mode (b"0)25, 0)75) for "xed}"xed end conditions. Increasing velocity #uctuationamplitude enlarges the stability regions. With increasing the mass ratio, the stability shift tohigher X values. At the critical velocity values, the unstable regions widen. In Figures 10 and11, the stable and unstable regions are plotted for the principal parametric resonance casefor di!erent mean velocities and velocity #uctuation amplitudes (b"0)25, 0)75) for the "rstmode and in Figures 12 and 13 for the second mode (b"0)25, 0)75) for "xed}sliding endconditions. The "xed}sliding tensioned pipe shows similar characteristics. Increasingvelocity #uctuation amplitude enlarges the stability regions. With increasing the mass ratio,the stability regions shift to higher X values. At the critical velocity values, the unstableregions widen. The stability borders for "xed}sliding tensioned pipe have lower values thoseof "xed}"xed tensioned pipe. At higher modes the stability borders shift to higher ) valuesfor both cases.
In all "gures (Figures 6}13), the regions in between the planar surfaces are unstablewhereas the remaining regions are stable.
6. CONCLUDING REMARKS
In this study, the transverse vibrations of highly tensioned "xed}"xed and "xed}slidingsupported pipes with vanishing #exural sti!ness and transporting #uid with time-dependent
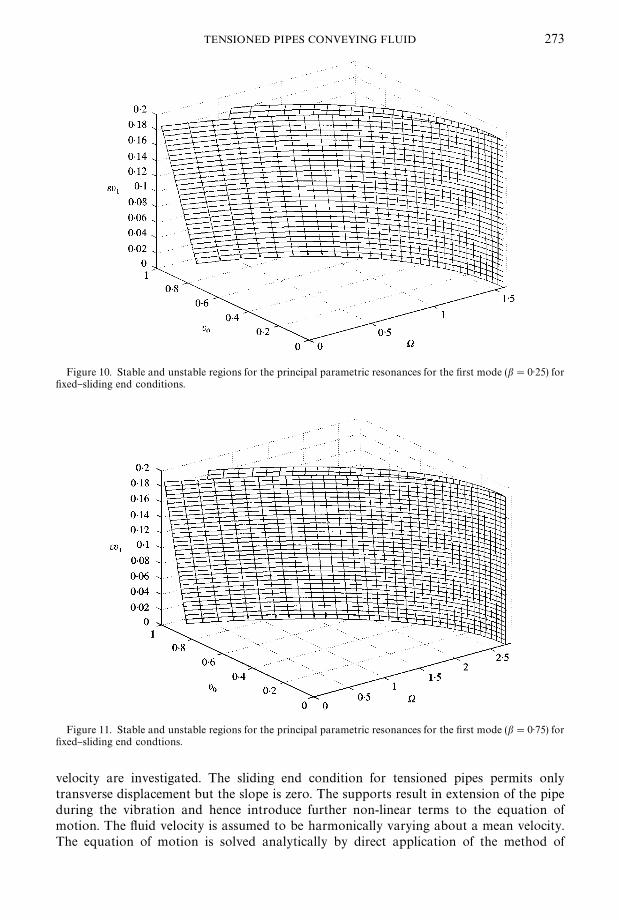
Figure 10. Stable and unstable regions for the principal parametric resonances for the "rst mode (b"0)25) for"xed}sliding end conditions.
Figure 11. Stable and unstable regions for the principal parametric resonances for the "rst mode (b"0)75) for"xed}sliding end condtions.
TENSIONED PIPES CONVEYING FLUID 273
velocity are investigated. The sliding end condition for tensioned pipes permits onlytransverse displacement but the slope is zero. The supports result in extension of the pipeduring the vibration and hence introduce further non-linear terms to the equation ofmotion. The #uid velocity is assumed to be harmonically varying about a mean velocity.The equation of motion is solved analytically by direct application of the method of
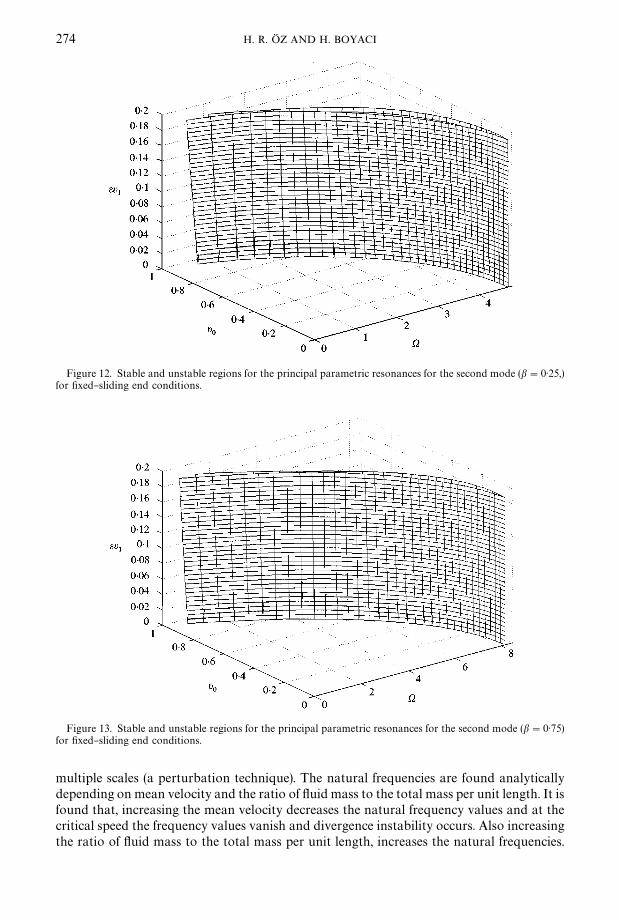
Figure 12. Stable and unstable regions for the principal parametric resonances for the second mode (b"0)25,)for "xed}sliding end conditions.
Figure 13. Stable and unstable regions for the principal parametric resonances for the second mode (b"0)75)for "xed}sliding end conditions.
274 H. R. OG Z AND H. BOYACI
multiple scales (a perturbation technique). The natural frequencies are found analyticallydepending on mean velocity and the ratio of #uid mass to the total mass per unit length. It isfound that, increasing the mean velocity decreases the natural frequency values and at thecritical speed the frequency values vanish and divergence instability occurs. Also increasingthe ratio of #uid mass to the total mass per unit length, increases the natural frequencies.
TENSIONED PIPES CONVEYING FLUID 275
The natural frequencies for "xed}sliding tensioned pipe are lower than those of "xed}"xedtensioned pipe. The principal parametric resonances are investigated in detail. Stabilityboundaries are determined analytically. It is found that instabilities occur when thefrequency of velocity #uctuations is close to two times the natural frequency of the constantvelocity system. When the velocity #uctuation frequency is close to zero, no instabilities aredetected up to the "rst order of perturbation. When the #uctuation frequency is away fromzero and twice the natural frequency, the solutions are bounded and no instability exists.Increasing velocity #uctuation amplitude enlarges the stability regions. With increasing themass ratio, the stability regions shift to higher velocity #uctuation frequency values. Stableand unstable region shift to lower velocity #uctuation frequency values. Stable and unstableregions shift to lower velocity #uctuation frequency for "xed}sliding supports whencompared with those of "xed}"xed supports.
REFERENCES
1. A. G. ULSOY, C. D. MOTE JR and R. SYZMANI 1978 Holz als Roh-und =erksto+ 36, 273}280.Principal developments in band saw vibration and stability research.
2. J. A. WICKERT and C. D. MOTE JR 1988 Shock and<ibration Digest 20, 3}13. Current research onthe vibration and stability of axially moving materials.
3. R. A. SACK 1954 British Journal of Applied Physics 5, 224}226, Transverse oscillation of travellingstrings.
4. F. R. ARCHIBALD and A. G. EMSLIE 1958 ASME, Journal of Applied Mechanics 25, 347}348. Thevibration of a string having a uniform motion along its length.
5. R. D. SWOPE and W. F. AMES 1963 Journal of the Franklin Institute 275, 36}55. Vibrations ofa moving threadline.
6. C. D. MOTE JR 1965 Journal of the Franklin Institute 279, 430}444. A study of band saw vibration.7. T. CHUBACHI 1958 Bulletin of Japanese Society of Mechanical Engineers 1, 24}29. Lateral
vibration of axially moving wire or belt form materials.8. W. L. MIRANKER 1960 IBM Journal Research and Development 4, 36}42. The wave equation in
a medium in motion.9. J. A. WICKERT and C. D. MOTE JR 1989 Journal of the Acoustical Society of America 85,
1365}1368. On the energetics of axially moving continua.10. J. A. WICKERT and C. D. MOTE JR 1990 ASME Journal of Applied Mechanics 57, 738}744.
Classical vibration analysis of axially moving continua.11. J. A. WICKERT 1992 International Journal of Non-linear Mechanics 27, 503}517. Non-linear
vibration of a travelling tensioned beam.12. M. PAKDEMI0 RLI0 , A. G. ULSOY and A. CERANOG[ LU 1994 Journal of Sound and <ibration 169,
179}196. Transverse vibration of an axially accelerating string.13. M. PAKDEMI0 RLI0 and H. BATAN 1993 Journal of Sound and <ibration 168, 371}378. Dynamic
stability of a constantly accelerating strip.14. M. PAKDEMI0 RLI0 and A. G. ULSOY 1997 Journal of Sound and <ibration 203, 815}832. Stability
analysis of an axially accelerating string.15. H. R. OG Z, M. PAKDEMI0 RLI0 and E. OG ZKAYA 1998 Journal of Sound and <ibration 215, 571}576.
Transition behaviour from string to beam for an axially accelerating material.16. H. R. OG Z and M. PAKDEMI0 RLI0 1999 Journal of Sound and<ibration 227, 239}257. Vibrations of an
axially moving beam with time dependent velocity.17. H. R. OG Z, M. PAKDEMI0 RLI0 and E. OG ZKAYA ASME Mechanics and Materials Conference, Symposium
on Nonlinear<ibrations and Perturbation Methods, Final program and Book of Abstracts June 27}30,Blacksburg, <irginia, ;SA, 394}395 Linear and non-linear vibration of axially moving beams.
18. H. R. OG Z, M. PAKDEMI0 RLI0 and H. BOYACI International Journal of Non-linear Mechanics. Nonlinearvibrations and stability of an axially moving beam with time dependent velocity (in press).
19. T. B. BENJAMIN 1961 Proceedings of the Royal Society of ¸ondon 261A, 457}499. Dynamics ofa system of articulated pipes conveying #uids: 1 Theory and II. Experiment.
20. S. NEMAT-NASSER, S. S. PRASAD and G. HERRMANN 1966 American Institute of Aeronautics andAstronautics Journal 4, 1276}1280. Destabilizing e!ect of velocity-independent forces innon-conservative continuous systems.

276 H. R. OG Z AND H. BOYACI
21. R. W. GREGORY and M. P. PAIDOUSSIS 1996 Proceeding of the Royal Society of ¸ondon 293A,512}544. Unstable oscillation of tabular cantilevers conveying #uid, 1. Theory and II.Experiment.
22. M. P. PAIDOUSSIS and G. X. LI 1993 Journal of Fluids and Structures 7, 137}204. Pipes conveying#uid: a model dynamical problem.
23. S. Y. LEE and C. D. MOTE JR 1997 Journal of Sound and <ibration 204, 717}734. A generalizedtreatment of the energetics of translating continua, Part I: strings and second order tensionedpipes.
24. S. Y. LEE and C. D. MOTE JR 1997 Journal of Sound and <ibration 204, 735}753. A generalizedtreatment of the energetics of translating continua, Part II: beams and #uid conveying pipes.
25. A. H. NAYFEH 1981 Introduction to Perturbation ¹echniques. New York: John Wiley.26. A. H. NAYFEH and D. T. MOOK 1979 Nonlinear Oscillations. New York: John Wiley.