studi pengaruh interferensi terhadap hambatan pada kapal katamaran simetri melalui cfd...
TRANSCRIPT

TUGAS AKHIR – MN091382
STUDI PENGARUH INTERFERENSI TERHADAP HAMBATAN PADA KAPAL KATAMARAN SIMETRI MELALUI CFD (COMPUTATIONAL FLUID DYNAMIC) SUTIYO N.R.P. 4106 100 075 Dosen Pembimbing Prof. Ir.I Ketut Aria Pria Utama, M.Sc, Ph.D Jurusan Teknik Perkapalan Fakultas Teknologi Kelautan Institut Teknologi Sepuluh Nopember Surabaya 2014

i
TUGAS AKHIR – MN091382
STUDI PENGARUH INTERFERENSI TERHADAP
HAMBATAN PADA KAPAL KATAMARAN SIMETRI
MELALUI CFD (COMPUTATIONAL FLUID DYNAMIC)
SUTIYO
N.R.P. 4106 100 075
Dosen Pembimbing
Prof. Ir.I Ketut Aria Pria Utama, M.Sc, Ph.D
Jurusan Teknik Perkapalan
Fakultas Teknologi Kelautan
Institut Teknologi Sepuluh Nopember
Surabaya
2014

THESIS - MN091382
Study The Effect Of Interference On Ship Symmetry Of Catamaran Through CFD (Computational Fluid Dynamics)
SUTIYO
N.R.P. 4106 100 075
Supervisor
Prof. Ir.I Ketut Aria Pria Utama, M.Sc, Ph.D
Departement of Naval Architecture and Shipbuliding Engineer
Faculty of Marine Engineer
Institut Teknologi Sepuluh Nopember
Surabaya
2014
ii

STUDI PENGARUH INTERFERENSI TERHADAP HAMBATAN PADA KAPAL KATAMARAN SIMETRI MELALUI CFD
(COMPUTATIONAL FLUID DYNAMIC)
Nama NRP Jurusan Dosen Pembimbing
: Sutiyo : 4106 100 075 : Teknik Perkapalan :Prof. Ir I Ketut Aria Pria Utama, M.Sc.
ABSTRAK
Berbagai kelebihan diberikan oleh kapal /catamaran simetris. Kelebihan yang
diberikan adalah tersedianya luas permukaan geladak kapal yang luas, tingkat stabilitas
yang bagus dan memiliki tingkat keselamatan yang lebih baik. Dalam hal penggunaan
bahan bakar yaitu mampu mengurangi penggunaan bahan bakar sebesar 20 % daripada
kapal monohull. Kapal /catamaran simetris juga memberikan kelebihan hambatan yang
lebih kecil dengan pengurangan hambatan sebesar 20 % dari kapal monohull dengan
displasemen yang sama. Permintaan pasar untuk kapal /catamaran dari berbagai tipe dan
dimensi serta didesain untuk hambatan yang keci/ dan kecepatan tinggi membuat optimasi
dari hambatan /ambung kapa/ demikian penting untuk memenuhi semua itu. Tugas akhir
ini bertujuan untuk mengetahui pengaruh konfigurasi baru bentuk /ambung kapal
/catamaran simetris terhadap besarnya hambatan /catamaran simetris, po/a a/iran (tekanan
dan kecepatan a/iran) dan interferensi yang dihasi/kan antara kedua /ambung kapa/.
Desain /ambung katamaran simetris menggunakan desain sama dengan model kapa/ pada
pengujian Towing Tank=LHI (Laboratorium Hidrodinamika Indonesia). Pada desain
/ambung /catamaran simetris dilakukan variasi jarak pemisah /ambung (demihu/1) yaitu
SJL= 0.2; 0.3 dan 0.4. Ana/isa perhitungan hambatan dan pengaruh interferensi antara
kedua lambung menggunakan ANSYS-CFD pada berbagai kecepatan dengan variasi
angka Froude yaitu Fn= 0.19: 0.28: 0.37: 0.46: 0.55 dan 0.65. Hasil ana/isa
menggunakan ANSYS-CFD kemudian dilakukan perbandingan dengan hasil pengujian
katamaran simetris pada Towing Tank-LHI di ITS.
Kata Kunci: hambatan, katamaran simetris, jarak pemisah lambung, CFD, ANSY CFX
v

LEMBAR PENGESAHAN
STT}I}I PENGARUH INTERFERENSI TERIIADAP
HAMBATAN PADA KAPAL KATAMARAN SIMETRI
MELALUI CFD (COMPUTATIONAL FLUID DYNAMIC)TUGAS AKIIIR
Diajukan Guna Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
pada
Bidang Studi Rekayasa Kapal
Jurusan Teknik Perkapalan
Fakultas Teknologi Kelautan
Institut Teknol,ogi Sepuluh Nopember
Oleh:
SUTIYO
N.R.P.4106 100 075
Disetujui oleh Dosen Pembimbing Tugas A*fiir
Prof. Ir.I.K.A.P. Utama M.Sc, Ph.D
SURABAYA, Juli 2014

LEMBAR RAVTSI
STUDI PENGARUH INTERF'ERENSI TERIIADAP
HAMBATAII PADA KAPAL KATAMARAN SIMETRI
MELALUI CFD (COMPUTATIONAL FLUID DYNAMIC)
TUGAS AKIIIR
Telah direvisi sesuai hasil sidang Ujian Tugas Akhir
Tanggal [8 Ju1i2014]
Bidang Studi Rekayasa Perkapalan
Jurusan Teknik Perkapalan
Fakultas Teknologi Kelautan
Institr* Teknologi Sepuklh Nopember
Oleh:
SUTTYO
N.R.P. +LA6WAA75
Disetujui oleh Dosen Penguji Tugas Akhir
Prof. Ir.I.K.A.P. Utama, IvI.Sc, Ph.D
Aries Sulisetyono, ST., MASc., Ph.D
tr. Murdjianto, M.Eng
M. Nurur Misbah, ST., MT.
ffi*rqhrwq
SURABAYA, puli 20141
t11

STUDY THE EFFECT OF INTERFERENCE ON THE SYMETRCAL CATAMARAN RESISTANCE USING CFD (COMPUTATIONAL FLUIDS DINAMYCS)
AutorName NRP Depertement Supervisor
: Sutiyo : 4106 100 075 :Naval Architetch and Shipbuilding Engineering ITS : Prof. Ir. I Ketut Aria Pria Utama, M.Sc.
ABSTRACT
Many advantages provided by the symmetrical catamaran boat is large decks, a good level
of stability and have a better survival rate. In terms of fuel use that is capable of reducing
fuel use by 20% than a mono hull vessel. Market demand for catamaran vessels of various
types and dimensions as well as barriers that are designed for small and high speed makes
the optimization of the hull resistance is thus important to fulfill all of that. This thesis aims
to determine the effect of the new configuration is symmetrical catamaran hull form to the
amount of asymmetric catamaran resistance, the pattern of flow (pressure and flow rate)
and the resulting interference between the two hulls of ships. Symmetric catamaran hull
design using a design similar to the model testing of ships on Towing Tank-IHL
(Indonesian Hydrodynamics Laboratory). In the symmetric catamaran hull design to
varying the distance separating (demihull), namely S I L = 0.2; 0.3 and 0.4. Analysis of
constraints and calculation of interference effects between the two hull using ANSYS,CFD
at various speeds with the variation of the Froude number Fn = 0.19: 0.28: 0.37: 0.46:
0.55 and 0.65. The results ofCFD analysis using ANSYS, then do the comparison with test
results on the asymmetric catamaran Towing Tank-IHL ITS.
Keywords: resistance, symmetric catamaran, hull separation distance, CFD, ANSYS CFX
vi

iv
KATA PENGANTAR
Puji syukur kepada ALLAH SWT, karena berkat rahmat, hidayah dan karunia-Nya
sehingga Tugas Akhir dengan judul “Studi Pengaruh Interferensi Terhadap Hambatan
Pada Kapal Katamaran Simetri Melalui CFD (Computational Fluid Dynamic)” ini
dapat terselesaikan. Tanpa pertolongan-Nya penulis tidak akan mampu menyelesaikan Tugas
Akhir ini. Dalam kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-
besarnya kepada:
1. Bapak Prof. Ir. I Ketut Aria Pria Utama, M.Sc. Ph.D selaku Ketua Jurusan Teknik
Perkapalan – FTK – ITS dan dosen pembimbing, atas segala bimbingan ilmu, waktu, dan
kesabaran dalam mengarahkan dan memberi nasehat kepada penulis dalam
menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Triwilaswandio. W.P. M.Sc. selaku dosen wali selama penulis menjadi
mahasiswa di Jurusan Teknik Perkapalan - FTK – ITS.
3. Bapak Dr. Ir Andi Jamaludin M.Sc yang selalu memberikan nasehat dan bimbingan
Tugas Akhir sehingga tetap optimis untuk menyelesaikannya.
4. Seluruh staf dosen, karyawan dan karyawati Jurusan Teknik Perkapalan atas bantuannya
baik secara langsung maupun tidak langsung
5. Para staff Lab. Hidrodinamika Kapal Jurusan Teknik Perkapalan ITS yang banyak
membantu dalam proses pengerjaan tugas akhir ini.
6. Seluruh angkatan 2006 Teknik Perkapalan ITS, serta semua pihak yang telah membantu
penulis dalam penyelesaian Tugas Akhir, yang tidak dapat disebutkan satu persatu dalam
laporan ini
7. Ibu Tuminah, Ibu yang selalu tenggelam dalam do’a untuk kesuksesan anak-anaknya,
semoga kesehatan selalu menyertai beliau. aamiin
Penulis sangat berharap adanya masukan dan saran dari semua pihak guna
kesempurnaan dalam penulisan Tugas Akhir ini. Semoga tulisan ini dapat bermanfaat bagi
kita semua.
Surabaya, Juli 2014

vii
DAFTAR ISI
LEMBAR PENGESAHAN...................................................................................... ii
LEMBAR REVISI.................................................................................................... iii
KATA PENGANTAR.............................................................................................. iv
ABSTRAK........................................................................................................... ...... v
ABSTRACT............................................................................................................... vi
DAFTAR ISI............................................................................................................... vii
DAFTAR GAMBAR................................................................................................ ix
DAFTAR TABEL..................................................................................................... xi
DAFTAR SIMBOL................................................................................................... xii
BAB 1 PENDAHULUAN........................................................................... ............ 1 1.1 Latar Belakang............................................................................................ 1 1.2 Perumusan Masalah.................................................................................... 3 1.3 Batasan ........................................................................................................ 3 1.4 Tujuan .......................................................................................................... 3 1.5 Manfaat ........................................................................................................ 4 1.6 Hipotesis ....................................................................................................... 4 1.7 Metodologi Penelitian ................................................................................... 4 1.8 Sistematika Penulisan .................................................................................... 5
BAB 2 TINJAUAN PUSTAKA................................................................................... 7 2.1 Kapal Katamaran........................................................................................ 8 2.2 Hambatan Kapal........................................................................................... 10 2.3 Katamaran Kapal Katamaran......................................................................... 12
BAB 3 CFD (COMPUTATIONAL FLUID DYNAMICS)...................................... 17 3.1 Konsep CFD.............................................................................................. 19
3.1.1 Persamaan Dasar Dinamika Fluida dalam CFD ........................................ 19
3.1.2 Penurunan Persamaan Aliran Viskos (Navier-Stokes) ........................... 21
3.2 CFD-Ansys CFX........................................................................................ 22 3.3 Model Kapal .............................................................................................. 23 3.4 Boundary Condition ................................................................................... 25 3.5 Verifikasi Hasil CFD ................................................................................. 28
BAB 4 METODOLOGI PENELITIAN................................................................. 31 4.1 Studi Literatur............................................................................................ 31

viii
4.2 Pengumpulan data. .................................................................................... 31 4.3 Pembuatan Geometri Kapal ...................................................................... 32 4.4 Pemilihan Jumlah Grid ............................................................................. 32 4.5 Pendefinisian Model ................................................................................. 33 4.6 Input Data Analisa dan Model Turbulensi ................................................ 37 4.7 Flow Solver (Solution) .............................................................................. 37 4.8 Analisa Hasil ............................................................................................. 38 4.9 Validasi data.............................................................................................. 40 4.10 Pengujian Model Katamaran Simetris di Towing Tank ........................... 40
BAB 5 DATA HASIL SIMULASI......................................................................... 43 5.1 Data Hasil Simulasi................................................................................... 43
BAB 6 ANALISA DAN PEMBAHASAN............................................................. 51 6.1 Konvergensi................................................... ........................................... 52 6.2 Grid Generation.................................................. ...................................... 53 6.3 Analisa Hambatan Total Lambung Katamaran Simetris............... ........... 53 6.4 Analisa Perbandingan Hambatan Total Lambung Katamaran Simetris
menggunakan CFD dan Eksperimen 56 6.5 Analisa Hambatan Viskos Lambung Katamaran Simetris.............. .......... 61
6.6 Analisa Perbandingan Hambatan Viskos Lambung Katamaran Simetris menggunakan CFD dan Eksperimen ......................................... 58
6.7 Analisa Hambatan Gelombang Lambung Katamaran Simetris ……… ... 67 6.8 Analisa Form factor Demihull dengan Katamaran Simetris.............. ....... 69
BAB 7 KESIMPULAN............................................................................................. 71 7.1 Umum.................................................. ..................................................... 71 7.2 Saran.................................................. ....................................................... 72
DAFTAR PUSTAKA ................................................................................................ 73
LAMPIRAN I DISAIN MODEL DAN KONFIGURASI LAMBUNG
KATAMARAN (ANSYS- CFX) ......................................
LAMPIRAN- II DATA HASIL SIMULASI CFD-ANSYS CFX …………….. 95
77

ix
DAFTAR GAMBAR
Gambar 1.1 Konfigurasi katamaran simetris
Gambar 2.1 Diagram Komponen Hambatan Kapal
Gambar 3.1. Diagran komputasi pada program Ansys CFX
Gambar 3.2 Model-model aliran
Gambar 3.3 Pemodelan tanpa free surface
Gambar 3.4 Pemodelan dengan free surface
Gambar 3.5 Dimensi domain untuk pemodelan tanpa free surface
Gambar 3.6 Dimensi domain untuk pemodelan dengan free surface
Gambar 3.7 Kondisi batas untuk pemodelan tanpa free surface
Gambar 3.8 Kondisi batas untuk pemodelan dengan free surface
Gambar 4.1 Hasil penggunaan ukuran grid yang berbeda untuk kapal
Gambar 4.2 Lokasi Kondisi Batas Inlet tanpa free surface
Gambar 4.3 Lokasi Kondisi Batas Outflow
Gambar 4.4 Salah satu contoh lokasi kondisi batas wall.
Gambar 4.5 Lokasi Kondisi Batas Ship
Gambar 4.6 Grafik Konvergensi.
Gambar 4.7 Distribusi kecepatan aliran fluida disekitar badan kapal
Gambar 4.8 Distribusi tekanan aliran fluida disekitar badan kapal.
Gambar 4.9 Digram flowchart pengerjaan Tugas Akhir
Gambar 5.1 Konfigurasi Kapal Katamaran
Gambar 6.1 Konvergensi proses iterasi pada CFD
Gambar 6.2 Initial computational domain pada CFD
Gambar 6.3 Grid independence pada CFD
Gambar 6.4 Koefisien Hambatan Total (Ct) Lambung Katamaran Simetris dengan
Variasi S/L
Gambar 6.5 Perbandingan CFD dan Experiment Hambatan Total antara Demihull
2
16
18
20
23
23
24
25
26
26
31
34
35
36
36
38
39
39
41
44
52
53
54
55

x
simetris
Gambar 6.6 Perbandingan CFD dan Experiment Hambatan Total antara Katamaran
simetris pada S/L = 0.2
Gambar 6.7 Perbandingan CFD dan Experiment Hambatan Total antara Katamaran
simetris pada S/L = 0.3
Gambar 6.8 Perbandingan CFD dan Experiment Hambatan Total antara
Katamaran simetris pada S/L = 0.4
Gambar 6.9 Koefisien Hambatan Viskos (Cv) Lambung Katamaran Simetris dengan
Variasi S/L
Gambar 6.10 Perbandingan CFD dan Eksperimen Hambatan Viskos antara Demihull
Simetris
Gambar 6.11 Perbandingan CFD dan Experiment Hambatan Viskos antara Katamaran
Simetris pada S/L = 0.2
Gambar 6.13 Perbandingan CFD dan Experiment Hambatan Viskos antara
Katamaran Simetris pada S/L = 0.4
Gambar 6.14 Koefisien Hambatan Gelombang (Cw) Lambung Katamaran Simetris
Dengan Variasi S/L
Gambar 6.15 Perbandingan Form Factor Demihull dan Katamaran Simetris
57
58
59
60
62
63
64
66
67
69

xi
DAFTAR TABEL
Tabel 2.1 Ukuran utama geometri kapal katamaran Simetris.
Tabel 5.1 Data Hidrostatik Demihull Kapal Katamaran simetris
Tabel 5.2 Data Hidrostatik Lambung Katamaran Simetris
Tabel 5.3 Data Variasi Kecepatan Kapal
Tabel 5.4 Data Hambatan Total Demihull
Tabel 5.5 Data Hambatan Total Kapal Katamaran Simetris S/L = 0.2
Tabel 5.6 Data Hambatan Total Kapal Katamaran Simetris S/L = 0.3
Tabel 5.7 Data Hambatan Total Kapal Katamaran Simetris S/L = 0.4
Tabel 5.8 Data Hambatan Viskos Demihull
Tabel 5.9 Data Hambatan Viskos Kapal Katamaran Simetris S/L = 0.2
Tabel 5.10 Data Hambatan Viskos Kapal Katamaran simetris S/L = 0.3
Tabel 5.11 Data Hambatan Viskos Kapal Katamaran simetris S/L = 0.4
Tabel 5.12 Data Koefisien Hambatan Demihull
Tabel 5.13 Data Koefisien Hambatan Kapal Katamaran simetris S/L = 0.2
Tabel 5.14 Data Koefisien Hambatan Kapal Katamaran simetris S/L = 0.3
Tabel 5.15 Data Koefisien Hambatan Kapal Katamaran simetris S/L = 0.4
Tabel 6.1 Katerakteristik jumlah mesh dan node
Tabel 6.2 Grid independence pada CFD
Tabel 6.3 Data ukuran model tangki percobaan dan CFD
Tabel 6.4 Koefisien hambatan total (CFD)
Tabel 6.5 Koefisien hambatan viskos (CFD)
Tabel 6.7 Koefisien hambatan gelombang (CFD)
Tabel 6.8 Perbedaan Prosentase Form Factor Demihull dan Katamaran Simetris
8
43
44
45
45
45
46
46
46
47
47
47
49
49
49
49
54
54
63
68
68
68
69
xii
DAFTAR SIMBOL
Demihull Salah satu lambung kapal
Simetri Lambung sama disisi dalam
V Volume displacement (m3)
L, LWL Panjang garis air (m)
b Lebar demihull (m)
B Lebar katamaran (m)
T Sarat kapal (m)
S/L Rasio jarak melintang antar demihull dan panjang kapal
v Kecepatan kapal (m/s)
Fr Froude number
Re Reynolds number
RT Hambatan Total (N)
Rv Hambatan Viskos (N)
Cb Koefisien bentuk
CT Koefisien hambatan total
CW Koefisien hambatan gelombang
CV Koefisien hambatan viskos
CF Koefisien hambatan gesek
β Faktor interferensi viskos
τ Faktor interferensi gelombang
WSA Luasan bidang basah kapal (static condition) (m2)
ρ Massa jenis (kg/m3)

1
BAB-1
PENDAHULUAN
1.1 LATAR BELAKANG MASALAH
Aplikasi kapal katamaran sebagai moda transportasi atau angkata laut/ sungai telah
berkembang secara pesat dewasa ini dan nampaknya akan terus berkembang dimasa akan
datang. Drewry Shipping Consultans, Ltd., (1990) menyatakan bahwa 43% dari seluruh
armada angkutan penumpang dan kendaraan yang ada dewasa merupakan kapal tipe
katamaran.
Suatu hal yang membuat kapal katamaran menjadi populer dan sukses digunakan
sebagai moda transportasi adalah tersedianya area geladak (deck area) yang lebih luas dan
tingkat stabilitas yang lebih nyaman dan aman (Insel dan Molland,1992). Disamping itu
katamaran (lambung ganda) dengan bentuk badan yang langsing dapat memperkecil
timbulnya sibakan air dibanding kapal lambung tunggal.
Hambatan adalah komponen paling penting pada kapal. Pada umumnya rasio
kerampingan yang besar dibutuhkan untuk mengurangi tahanan. Lambung kapal harus
seramping mungkin untuk mencapai kecepatan tinggi. Namun, kekurangan utama dari
kerampingan ini adalah berkurangnya stabilitas transversal. Oleh karena itu untuk
menutupi kekurangan dari single body harus diubah menjadi multihull dengan jarak antar
lambung yang tepat (Javanmardi, 2008).
Diketahui bahwa analisa aliran viskos pada lambung pada lambung kapal katamaran
masih sangat terbatas di dalam literatur. Pendekatan lebih banyak didasarkan pada model
potential flow untuk memprediksi untuk memprediksi inteferensi gelombang dan
menentukan separasi optimal antara lambung (demihulls).
Pada kapal katamaran terdapat fenomena yang menarik terkait dengan hambatan yang
terjadi. Dengan menganggap bahwa kapal katamaran terdiri dari 2 badan kapal, maka akan
terjadi interferensi tahanan antara badan kapal tersebut. Hal ini tentu saja akan
mempengaruhi besarnya hambatan kapal katamaran.

2
Gambar 1.1 Konfigurasi katamaran simetris
Perhitungan besarnya hambatan kapal dapat dilakukan dengan beberapa cara yaitu
analitis teoris, numerik, empirik dan ekperimental. Pada cara analitis teoris dikembangkan
persamaan matematis untuk geometri kapal tertentu sehingga hal ini memerlukan waktu
yang sangat lama sehingga tidak menarik.
Salah satu cara dengan memanfaatkan perkembangan teknologi adalah perhitungan
numerik dengan menggunakan apa yang disebut Computational Fluid Dynamics (CFD)
yang memanfaatkan perkembangan teknologi berkecepatan tinggi. Teknik CFD
memungkinkan penyelidikan sebuah model dengan ketelitian yang sangat tinggi tetapi
dengan konsekuensi memerlukan kapasitas memori komputer yang tinggi (Versteeg dan
Malalasekera, 1995).
Perhitungan numerik saat ini menggunakan apa yang disebut Computational Fluid
Dynamic (CFD) yang memanfaatkan perkembangan teknologi berkecepatan tinggi. Teknik
CFD memungkinkan penyelidikan sebuah model edengan ketelitian yang sangat tinggi
tetapi dengan konsekuensi memerlukan kapasitas memori computer yang tinggi
(Utama,2009).
Selanjutnya, dalam Tugas Akhir ini dibahas persoalan tahanan kapal dengan
menggunakan pendekatan Computational Fluid Dynamic (CFD). Metode ini merupakan

3
perhitungan hambatan yang berdasarkan aliran fluida. Dengan menggunakan
Computational Fluid Dynamic (CFD) dapat diketahui fenomena – fenomena yang ada
dalam kapal katamaran yang terkait dengan tahanan kapal. Hasil analisa menggunakan
CFD-Ansys CFX kemudian dilakukan perbandingan dengan hasil pengujian katamaran
Simetris oleh Jammaluddin, Utama dan Molland (2010) pada Towing Tank-LHI sebagai
validasi dari hasil percobaan.
1.2 Perumusan Masalah
Adapun perumusan masalah dalam tugas akhir ini adalah :
1. Apa pengaruh jarak demihull secara melintang (S/L) terhadap hambatan kapal
katamaran?
2. Bagaimana pola aliran (tekanan dan kecepatan aliran) dan pengaruh interferensi
yang dihasilkan antar lambung katamaran
3. Berapa besar persentase hasil ANSYS-CFD dengan pengujian di towing tank?
1.3 Batasan Masalah
Batasan masalah perlu dilakukan untuk memfokuskan pembahasan
sehingga per-masalahan tidak melebar dan untuk memperoleh hasil akhir yang sesuai
dengan tujuan yang hendak dicapai. Berikut ini merupakan beberapa pokok bahasan
yang akan dikaji, antara lain:
1. Penelitian hanya sebatas teoritis, yaitu semua perhitungan dilakukan dengan
menggunakan bantuan software CFD-Ansys CFX
2. Model kapal katamaran yang digunakan dalam tugas akhir ini adalah model kapal
ikan penelitian yang dilakukan oleh Utama (2009)
3. Variasi jarak demihull secara melintang (S/L) adalah 0.2; 0.3 dan 0.4
4. Variasi kecepatan yang digunakan adalah Fr 0.19 -0.65
1.4 Tujuan
Adapun tujuan Tugas Akhir ini adalah :
1. Mengetahui pengaruh jarak demihull secara melintang terhadap hambatan kapal
kata-maran.
2. Mengetahui pengaruh bentuk transom sebagian lambung katamaran (simetris)
terhadap hambatan kapal katamaran.

4
3. Mengetahui pengaruh lambung yang sejajar secara memanjang (unstagger)
terhadap hambatan kapal katamaran.
4. Mengetahui besar persentase hasil CFD dengan pengujian di towing tank.
1.5 Manfaat
1. Memberikan informasi tentang pengaruh bentuk simetris lambung katamaran
terhadap hambatannya.
2. Menambah database tentang kajian kapal katamaran
3. Sebagai bahan pertimbangan kepada pihak-pihak yang tertarik dalam
pengembangan kapal katamaran.
1.6 Hipotesis
Hipotesa penulis adalah variasi rasio jarak demihull (S/L) dan Froude
number berpengaruh terhadap besar hambatan kapal katamaran simetris.
1.7 Metodologi Penelitian
Metode dan langkah-langkah yang dilakukan dalam penelitian ini adalah
sebagai berikut:
1. Pembuatan geometri model kapal berdasarkan ukuran data kapal yang sudah ada.
Hal ini dimaksudkan agar dapat dilakukan pembandingan hasil yang didapat
dengan penelitian telah dilakukan oleh Jammaluddin, Utama dan Molland (2010)
dengan pengujian Towing Tank kapal katamaran simetris di LHI.
2. Hasil analisa data CFD-Ansys CFX tergantung dari banyaknya jumlah grid
(meshing) yang ditentukan. Selain itu meshing yang digunakan adalah dari yang
renggang sampai yang padat untuk dapat dilakukan grid indepensi.
3. Pendefinisian model dimaksudkan agar model yang telah dibuat dapat dikenali
oleh CFD-Ansys CFX.
4. Input data yang dilakukan adalah pemasukan kondisi batas berdasarkan data
eksperimen. Dan pemilihan model turbulen yang sesuai dengan analisa yang
dimaksud.
5. Selanjutnya adalah proses flow solver, CFD akan membaca data model dan data
input kemudian diselesaikan dengan metode RANS melaui pendekatan iterasi.

5
6. Hasil dari running program ANSYS-CFD adalah berupa hambatan viskos dan
hambatan total.
7. Hasil yang telah didapatkan dikomparasi dengan hasil eksperimen yang telah
dilakukan oleh Utama (2009) dan hasil pengujian kapal katamaran simetris oleh
LHI, diharapkan hasilnya memilki tingkat kesalahan < 5 %.
8. Jika > 5 % akan dilakukan peninjauan ulang model, meshing, Input data.
9. Hasil yang telah memenuhi kriteria akan disusun sebagai Tugas Akhir.
1.8 Sistematika Penulisan
Penulisan pembahasan dalam tugas akhir ini disusun berdasarkan prosedur
penulisan tugas akhir. Dalam penyusunannya dikembangkan menjadi 6 bab.
ABSTRAK
KATA PENGANTAR
DARTAR ISI
DAFTAR GAMBAR
DARTAR TABEL
BAB I PENDAHULUAN
Bab ini berisi uraian secara umum dan singkat meliputi latar belakang
masalah, tujuan penulisan, manfaat penulisan, batasan masalah dan
sistematika penulisan dari tugas akhir yang disusun.
BAB II TINJAUAN PUSTAKA
Bab ini berisi penjelasan tentang berbagai referensi dan teori yang terkait
dengan judul penelitian yang meliputi perhitungan hambatan suatu kapal,
input data, dan beberapa manfaat yang didapatkan dengan CFD dalam
mengetahui besar hambatan katamaran.
BAB III COMPUTATIONAL FLUID DYNAMIC
Bab ini berisi seluruh pengetahuan dan perkembangan CFD serta kelebihan
dan kekuranganny.
BAB IV METODOLOGI
Pada bab ini akan dituliskan semua yang terkait dengan analisa CFD yang
dilakukan, baik langkah-langkah input CFD maupun hasil CFD yang nantinya
dapat digunakan untuk mendapatkan hasil yang diharapkan.
BAB V ANALISA DAN PEMBAHASAN

6
Bab ini berisi tentang pengecekan hasil CFD selesai dilakukan dengan hasil
percobaan, sehingga dapat diketahui berapa besar error dari program ini.
BAB VI KESIMPULAN DAN SARAN
Bab ini menjelaskan tentang kesimpulan dan saran dari hasil penelitian yang
telah dilakukan, serta rekomendasi dan saran untuk penelitian selanjutnya.
DAFTAR PUSTAKA
LAMPIRAN

7
BAB-2
TINJAUAN PUSTAKA
2.1 Kapal Katamaran
Terdapat begitu banyak jenis kapal termasuk kapal dengan badan kapal lebih dari
satu seperti kapal katamaran dengan 2 buah badan kapal, trimaran dengan 3 buah badan
kapal dan seterusnya. Terdapat beberapa hal penting yang harus diperhatikan pada saat
merancang kapal katamaran yaitu permasalahan hambatan yang ditimbulkan oleh dua
badan kapal sehingga menghasilkan interferensi diantara kedua lambung tersebut yang
didefinisikan sebagai interferensi viskos yang disebabkan oleh aliran Simetris disekitar
kedua badan kapal dan merupakan pengaruh pada pembentukan boundary layer disekitar
badan kapal serta interferensi gelombang yang disebabkan oleh sistem gelombang antara
kedua badan kapal
Berbagai keuntungan lebih diberikan oleh kapal katamaran dibandingkan dengan
kapal monohull. Kapal katamaran memiliki luasan geladak yang lebih luas dan tingkat
stabiltas transversal yang lebih baik dibandingkan dengan kapal monohull (Insel &
Molland, 1990).
Keuntungan lain dari bentuk kapal katamaran selain dari segi kenyamanan
penumpang adalah bentuk kapal yang berbeda dengan monohull membuat hambatan kapal
katamaran 20 % lebih kecil pada displasemen kapal yang sama. Hal ini membuat kapal
katamaran mampu menurunkan konsumsi bahan bakar sebesar 20% dibandingkan dengan
kapal monohull.
Luasnya layout kapal katamaran memberikan kemudahan dalam desain dan tata
ruang kapal untuk berbagai jenis kapal seperti kapal penumpang serta penataan ruang
untuk kendaraan. Hal ini membuat kapal katamaran telah banyak digunakan oleh pada
berbagai tipe kapal penumpang.
Selain kelebihan yang dimiliki oleh kapal katamaran, kapal katamaran memiliki
beberapa kekurangan seperti penggunaan dua lambung katamaran membuat kapal
katamaran memiliki maneuver yang kurang baik jika dibandingkan dengan kapal
monohull.
Karakteristik hambatan di air tenang kapal katamaran lebih besar dibandingkan
dengan monohull, dimana dominasi hambatan gesek mencapai 40% dari hambatan total
pada kecepatan rendah (Wijholst dan Wargeland, 1996). Penurunan kecepatan kapal

8
katamaran akibat kondisi gelombang yang tinggi tidak jarang ditemui pada kapal
katamaran sehingga kapal katamaran pada umumnya digunakan pada kecepatan tinggi
dengan tingkat penggunaan bahan bakar yang relatif efkonomis.
Menurut (Insel & Molland, 1990), kapal katamaran memberikan kebebasan pada
aspek desain bentuk lambung kapal dan dimensi dari demihull untuk meningkatkan
stabilitas transversal. Hal ini membuat volume dari demihull dapat didistribusikan secara
bebas baik secara transversal maupun longitudinal dibandingkan dengan monohull. Aspek
desain yang fleksibel ini membuat katamaran dapat didesain relatif Simetris terhadap
centerplane.
Pada tugas akhir ini, ukuran utama model kapal katamaran Simetris menggunakan
ukuran utama yang sama dengan model pada pengujian towing tank kapal katamaran
Simetris yang telah dilakukan di Laboratorium Hidrodinamika Indonesia (LHI) oleh
Jammaluddin, Utama dan Molland (2010). Berikut merupakan perbandingan data
hidrostatik kapal katamaran Simetris.
Tabel 2.1 Ukuran utama geometri kapal katamaran Simetris.
Parameter Katamaran simetris Unit
Lwl 1.405 m
b - m
T 0.126 m
WSA 0.715 m2
Volume 0.014 m3
Displasemen 14.5 kg
Cb 0.606
L/1/3 5.830
L/B 3.361
B/T 3.317
2.2 Hambatan Kapal
William Froude (1867) pertama kali memperkenalkan total hambatan kapal yang
terdiri atas dua komponen yaitu hambatan sisa (residual) dan hambatan gesek (friction).
Hambatan sisa dalam hal ini meliputi komponen hambatan wave-making system energies,
eddy dan viscous energy losses akibat bentuk lambung kapal. Sedangkan hambatan gesek
9
kapal diasumsikan sama dengan hambatan gesek suatu pelat datar 2-dimensi yang
mempunyai luas permukaan bidang basah yang sama serta bergerak di air pada kecepatan
sama dengan kecepatan kapal.
Komponen hambatan total pertama kali diperkenalkan oleh W. Froude. Dimana
hambatan total merupakan penjumlahan hambatan gesek (RF) dengan hambatan sisa (RR)
sehingga didapat persamaan:
RTM = RFM + RRM (2.1)
Dimana:
RTM : Hambatan total model dari percobaan.
RFM : Hambatan gesek dari permukaan datar yang memiliki permukaan basah
sama dengan model, yang mana dapat ditentukan dari:
RFM = f S Vn (2.2)
f,n: konstanta, fungsi dari panjang dan sifat permukaan.
RRM : Hambatan sisa dari model.
Dengan menggunakan metode Froude, dapat diperhitungkan untuk koefisien hambatan
kapal full scale dari hasil perobaan model kapal, dengan persamaan koefisien hambatan:
RFT CCC (2.3)
Metode analisa 2-dimensi tersebut diatas tidak cukup meng-refleksikan kontribusi bentuk/
kontur lambung kapal (yang 3-dimensi) terhadap hambatan viskos, sehingga kemudian
Hughes (1954) memperkenalkan metode untuk digunakan dalam korelasi model kapal
dimana total hambatan adalah penjumlahan dari 3 (tiga) komponen:
1. Hambatan gesek (friction) adalah gaya tangential stress yang timbul antara molekul air
dan kulit badan kapal, yang kemudian sebagai hambatan bidang permukaan dengan
area dan panjang yang sama dengan model.
2. Hambatan bentuk (form) adalah komponen hambatan yang dinyatakan dalam bilangan
‘k’, dimana merupakan hambatan diluar batas item diatas dalam kasus lambung yang

10
tercelup cukup dalam. Hughess mengasumsikan bahwa untuk lambung yang
streamline pada aliran turbulent, dapat diekspresikan sebanding dengan hambatan
friction.
3. Hambatan free surface sebagai hambatan gelombang (CW) adalah hambatan yang
timbul akibat pergerakan kapal relatif terhadap air sehingga timbul perbedaan tekanan
pada permukaan (bidang) basah kapal yang selanjutnya menimbulkan wave pattern.
Hambatan gelombang merupakan pengurangan total hambatan (CT) dari penjumlahan
hambatan gesek (CF) dan hambatan bentuk (CF0) dari model.
WOFFT CCCC dimana FFO kCC
WFT CCkC 1 (2.4)
(1+k) disebut form factor dan dapat diperoleh dari eksperimen pada kecepatan rendah (Fr <
0.1) dimana Cw dapat diabaikan, sehingga form factor dapat dihitung dengan:
(2.5)
Selanjutnya Standar internasional dari ITTC (1978) dengan judul “1978
Performance Prediction Method for Simple Single Screw Ships”.meng-klasifikasikan
hambatan kapal di air tenang (calm water), secara praktis, dalam 2 (dua) komponen
hambatan utama yaitu hambatan viskos (viscous resistance) yang terkait dengan bilangan
Reynolds dan hambatan gelombang (wave-making resistance) yang tergantung pada
bilangan Froude, dimana korelasi kedua komponen hambatan tersebut diperlihatkan pada
persamaan dibawah ini.
Hambatan total kapal dibagi dalam empat komponen:
CT = (1+k) CF + CR + CF + CAA (2.6)
Dimana,
(1+k) : merupakan form factor.
CF : Hambatan gesek dengan menggunakan ITTC ’57.
CR : Hambatan sisa dari percobaan model.
CF : Roughness Allowance (0 for smooth model).
11
CAA : Air Resistance (assumed 0 for model without superstructure).
Metode untuk mendapatkan k dengan pengukuran pada kecepatan rendah
dimana CR diasumsikan mendekati 0 dan (1+k) = CT/CF. Dengan penurunan
sebagai berikut:
CR 0
CF 0 (0 for smooth model).
CAA 0 (assumed 0 for model without superstructure).
Sehingga,
CT = (1+k) CF + CR + CF + CAA
= (1+k) CF + 0
CT = (1+k) CF
(1+k) = CT/CF
Pada pakteknya, percobaan pada kecepatan rendah memiliki kelemahan
dalam menjamin keakuratan hasil yang didapat sehingga terdapat metode lain
dalam memperhitungkan hambatan, yaitu metode yang diusulkan oleh Prohaska.
Mengasumsikan CRM = a Fnn pada kecepatan rendah (pada umumnya
Fn<0.2) sehingga didapat persamaan hambatan total kapal sebagai berikut:
CT = (1+k) CF + a Fnn (2.7)
Dimana (1+k), a dan n dapat diselesaikan melalui least square analysis dari
pengukuran pada kecepatan rendah.
2.3 Hambatan Kapal Katamaran
Hambatan kapal katamaran diasumsikan sebagai penjumlahan dari beberapa
komponen yang saling tidak bergantung (independent) agar mudah memecahkan masalah
hambatan kapal dan pengaruh jarak antara lambung (hull separation).
Metode yang digunakan pada pengujian lambung kapal yang konvensional yaitu
dengan membagi hambatan pada beberapa komponen yang didasarkan pada pengukuran
total hambatan dari pengujian model dengan mengestimasi hambatan gesek (friction) dari
formula empiris, atau pengukuran lansung dari komponen-komponen. Kedua metode
tersebut untuk mengidentifikasi komponen-komponen dan asumsi-asumsi yang terkait.

12
Hambatan kapal katamaran memiliki fenomena yang lebih kompleks dibanding
dengan monohull, sebab adanya pengaruh interferensi dan interaksi diantara dua lambung
kapal. Pengaruh interferensi dan interaksi tersebut sangat pedu dikaji secara saksama baik
melalui eksperimen maupun melalui simulasi CFD, agar nantinya hasil ini dapat
memberikan kontribusi didalam memprediksi komponen hambatan dan total hambatan
kapal katamaran.
Pengaruh interferensi dan interaksi yang dimaksud diatas dapat dikelompokkan atas
dua bagian:
1. Interferensi lambung kapal
Aliran air disekitar lambung (demihull) yang simetris adalah tidak simetris yang
disebabkan timbulnya interaksi aliran diantara lambung tersebut yaitu besar tekanan yang
timbul disekitar lambung adalah relatif tidak simetri terhadap garis tengah (centerline)
lambung. Hal tersebut dapat dijelaskan sebagai berikut:
a. Usikan kecepatan aliran disekitar lambung (demihull) meningkat, khususnya di area
bagian dalam (tunnel side). Penambahan kecepatan menyebabkan meningkatnya
hambatan skin friction dan memodifikasi fom factor
b. Karena ketinggian gelombang pada belakang lambung (stem) bagian dalam dan luar
adalah berbeda, maka aliran air pada stem memperlihatkan arah ke datam atau ke arah
luar. Hal ini mengakibatkan terjadinya spray pada belakang lambung yang selanjutnya
menimbulkan komponen drag.
c. Sebagaimana gelombang yang ditimbulkan dari satu lambung yang mencapai lambung
lainnya, maka luas bidang basah akan berubah, sehingga hambatan skin fiiction juga
berubah.
2. Interferensi Gelombang
Sebagaimana dua labmung kapal katamaran yang secara berdampingan melaju
pada kecepatan tertentu maka pengaruh interfensi dan interaksi hambatan gelombang yang
ditimbulkan dapat diobservasi.
a. Karena adanya perubahan tekanan sekitar, rnaka gelombang (wavemaking). Pada
lambung (demihull) dapat berubah. Dengan kata lain formasi gelombang dari lambung
dapat berbeda dari lambung yang terisolasi.
b. Interaksi gelombang yang ditimbulkan oleh lambung dapat tejadi. Gelombang
transversal dari satu lambung selalu diperkuat oieh lambung lainnya, sedangkan

13
WF CCk 1
pencaran gelombang yang terjadi didepan (bow) dari lambung yang satu dapat
ditiadakan oleh pencaran gelombang dibelakang (stem) dari lambung lainnya atau oleh
refleksi gelombang depan yang sama dari lambung lainnya
c. Refieksi pencaran gelombang dari lambung lainnya membuat fenomena interferensi dan
interaksi menjadi kompleks dan rumit
Dari uraian tersebut memperlihatkan bahwa pengaruh interferensi viskos dan
gelombang sangat signifikan pada kapal katamaran. Interferensi viskos disebabkan oleh
aliran air yang tidak simetri (asymmentric-flow) di sekitar lambung yang mana
memberikan pengruh pada formasi lapisan batas (boundary layer), sedangkan interferensi
gelombang disebabkan interaksi dari gelombang yang ditimbulkan oleh masing-masing
lambung.
Pada bagian ini diuraikan komponen koefisien interaksi hambatan pada demihull
(catamaran) adalah sebagai berikut:
CATWCATFCATCATT CCkC 1
(2.8)
dimana:
= Faktor interferensi hambatan bentuk (form), yang diakibatkan oleh
perubahan tekanan yang terjadi antara dua lambung.
σ = Factor interferensi hambatan gesek (friction), yang diakibatkan oleh
terjadinya penambahan kecepatan aliran diantara dua lambung.
= Faktor interferensi hambatan gelombang (wave), yang diakibatkan oleh
pertemuan dua moda gelombang (dari haluan) diantara kedua
lambung.
Dengan memasukkan efek interferensi yang dihasilkan maka metode untuk
perhitungan hambatan total kapal katamaran dapat memodifikasi dari perhitungan
hambatan total monohull. Modifikasi dapat dilakukan pada metode ITTC ’57, ITTC’78 dan
pegukuran secara langsung untuk mengetahui faktor interferensi (Jammaluddin dan
Utama). Berikut merupakan modifikasi yang dilakukan pada metode ITTC ‘57:
Hambatan total monohull
CT (mono) = CF (mono) + CR (mono)
Hambatan total katamaran
CT (cat) = CF (cat) + CR (cat)

14
= CF + CR
Sehingga hambatan total katamaran
CT (cat) = CF + CR (2.9)
Dimana,
: merupakan faktor interferensi hambatan gesek (friction).
: merupakan faktor interferensi hambatan sisa (residual).
Faktor interferensi hambatan gesek () dapat menginterpretasikan adanya
pertambahan kecepatan pada daerah antar lambung katamaran yang mana faktor ini dapat
diperhitungkan dari integrasi hambatan gesek lokal atas permukaan bidang basah dan
dipengaruhi oleh jarak pisah lambung (S/L). Variasi besarnya jarak pisah lambung (S/L)
dan Froude Number yang mengakibatkan perubahan kecepatan kapal berpengaruh
terhadap besarnya faktor interferensi hambatan sisa () dimana faktor ini dapat diintegrasi
dari hasil percobaan.
Metode lain dalam perhitungan hambatan total katamaran dilakukan dengan
memodifikasi metode perhitungan hambatan total katamaran oleh ITTC ’78:
CT (cat) = CF (cat) + CW (cat)
CT (cat) = (1+ k) CF + CW
Sehingga hambatan total katamaran
CT (cat) = (1+ k) CF + CW (2.10)
Dimana ,
: merupakan faktor interferensi hambatan gesek (friction) sesuai dengan
metode ITTC ’57.
: merupakan faktor interferensi hambatan bentuk (form).
: merupakan faktor interferensi hambatan gelombang (wave).
digunakan dalam perhitungan tekanan disekitar badan kapal. Untuk tujuan
praktis, dan dapat dikombinasikan dalam faktor interferensi hambatan viskos ()
sehingga :
(1+ k) = (1+ k) (2.11)
Sedangkan faktor interferensi hambatan gelombang dapat diperoleh dari hasil
percobaan sehingga diperoleh hambatan total kapal katamaran sebagai berikut:

15
CT (cat) = (1+ k) CF + CW (2.12)
Penurunan rumus Interferensi
Untuk Hambatan Total Monohull
CT (mono) = (1+ k) CF + CW
CW (mono)= [CT - (1+ k) CF ](mono) (2.13)
= [CT - (1+ k) CF ](mono)/ CW (mono)
Dengan catatan bahwa untuk demihull in isolation maka =1 dan = 1.
Untuk Hambatan Total Katamaran
CT (cat) = (1+ k) CF + CW
CW (cat)= [CT - (1+ k) CF ](cat)
= [CT - (1+ k) CF ](cat) / CW (cat) (2.14)
Maka dengan substitusi dari Pers. (11) dan Pers (12) didapat
(mono) = (cat)
[CT - (1+ k) CF ](mono) / CW (mono) = [CT - (1+ k) CF ](cat) / CW (cat)
= CW (cat)/ CW (mono) = [CT - (1+ k) CF ](cat) / [CT - (1+ k) CF ](mono)
Sehingga rumus interferensi
= [CT - (1+ k) CF ](cat) / [CT - (1+ k) CF ](mono)
Secara skematik, pembagian komponen hambatan diperlihatkan
pada skematik diagram dibawah ini.

16
Gambar 2.1 Diagram Komponen Hambatan Kapal

17
BAB-3
COMPUTATIONAL FLUID DYNAMIC (CFD)
CFD adalah metode penghitungan, memprediksi, dan pendekatan aliran fluida
secara numerik dengan bantuan komputer. Aliran fluida dalam kehidupan nyata memiliki
banyak sekali jenis dan karakteristik tertentu yang begitu kompleks, CFD melakukan
pendekatan dengan metode numerasi serta menggunakan persamaan-persamaan fluida.
CFD merupakan metode penghitungan dengan sebuah kontrol dimensi, luas dan
volume dengan memanfaatkan bantuan komputasi komputer untuk melakukan perhitungan
pada tiap-tiap elemen pembaginya. Prinsipnya adalah suatu ruang yang berisi fluida yang
akan dilakukan penghitungan dibagi-bagi menjadi beberapa bagian, hal ini sering disebut
dengan sel dan prosesnya dinamakan meshing. Bagian-bagian yang terbagi tersebut
merupakan sebuah kontol penghitungan yang akan dilakukan oleh aplikasi atau software.
Kontrol-kontrol penghitungan ini beserta kontrol-kontrol penghitungan lainnya merupakan
pembagian ruang yang disebutkan tadi atau meshing. Nantinya, pada setiap titik kontrol
penghitungan akan dilakukan penghitungan oleh aplikasi dengan batasan domain dan
boundary condition yang telah ditentukan. Prinsip inilah yang banyak dipakai pada proses
penghitungan dengan menggunakan bantuan komputasi komputer.
CFD adalah penghitungan yang mengkhususkan pada fluida, mulai dari aliran fluida,
heat transfer dan reaksi kimia yang terjadi pada fluida. Atas prinsip-prinsip dasar mekanika
fluida, konservasi energi, momentum, massa, serta species, penghitungan dengan CFD
dapat dilakukan. Secara sederhana proses penghitungan yang dilakukan oleh aplikasi CFD
adalah dengan kontrol-kontrol penghitungan yang telah dilakukan maka kontrol
penghitungan tersebut akan dilibatkan dengan memanfaatkan persamaan-persamaan yang
terlibat. Persamaan-persamaan ini adalah persamaan yang dibangkitkan dengan
memasukkan parameter apa saja yang terlibat dalam domain. Misalnya ketika suatu model
yang akan dianalisa melibatkan temperatur berarti model tersebut melibatkan persamaan
energi atau konservasi dari energi tersebut. Inisialisasi awal dari persamaan adalah
boundary condition. Boundary condition adalah kondisi dimana kontrol-kontrol perhitungan
didefinisikan sebagi definisi awal yang akan dilibatkan ke kontrol-kontrol penghitungan
yang berdekatan dengannya melalui persamaan-persamaan yang terlibat.
Pada proses pemodelan kapal katamaran, analisa CFD akan dilakukan dengan
bantuan software ICEM CFD dan CFX yang merupakan produk dari ANSYS. ICEM CFD

18
digunakan pada tahap pembuatan geometri lambung tahap meshing baik pada model
maupun pada fluida. Sedangkan untuk pengerjaan tahap selanjutnya digunakan CFX.
Analisa CFD yang akan dilakukan pada pemodelan lambung katamaran ini adalah
pemodelan aliran dan perhitungan besarnya drag/ hambatan pada lambung tersebut,
visualisasi aliran fluida. Program CFD terdiri dari tiga tahap yaitu : Pre-processor, Flow
Solver (Solution), dan Post-processor.
Gambar 3.3 memperlihatkan skema perhitungan dengan menggunakan program
Ansys CFX. Struktur ANSYS CFX terdiri dari 4 modul software yang memerlukan
geometri dan mesh untuk memberikan informasi yang dibutuhkan dalam menampilkan
analisa CFD. Komponen ANSYS CFX antara lain ANSYS CFX-Pre sebagai bagian dari
Physics Pre-Processor, dilanjutkan dengan ANSYS CFX-Solver yang bertautan dengan
ANSYS CFX-Solver Manager sebagai bagian untuk memecahkan atau menjalankan
simulasi dan ANSYS CFD-Post yang merupakan modul untuk menampilkan hasil simulasi
yang dirangkai dengan
berbagai visualisasi aliran.
Gambar 3.1. Diagran komputasi pada program Ansys CFX
19
3.1. Konsep Computational Fluid Dynamics
Computational Fluid Dynamics (CFD) merupakan salah satu metode perhitungan
dalam sebuah control dimensi, luas dan volume dengan memanfaatkan bantuan komputer
dalam melakukan perhitungan disetiap elemen-elemen pembaginya. CFD juga
didefinisikan sebagai suatu proses analisa terhadap suatu sistem tertentu yang melibatkan
masalah perpindahan panas, aliran fluida, distribusi kecepatan dan fenomena terkait
dengan dinamika fluida dimana proses perhitungan dan analisa dilakukan dengan
menggunakan komputer (Versteeg dan Malalasekera, 1995).
Penggunaan CFD telah berkembang begitu luas dalam beberapa bidang industri dan
berbagai disiplin ilmu. CFD digunakan untuk melakukan berbagai eksperimen dalam
sebuah komputer dengan menggunakan ekperimen numerik. Penggunaan CFD untuk
tujuan eksperimen memberikan keuntungan yang lebih jika dibandingkan dengan
eksperimen dengan menggunakan model. Efisiensi waktu dan jumlah pengujian yang tak
terbatas serta hasil yang didapatkan dapat diperoleh sesuai dengan pemberian kondisi batas
yang diterapkan dan dapat dianalisa disetiap waktu yang ditentukan menjadikan CFD
memiliki keunggulan tersendiri.
Pada saat ini terdapat berbagai macam perangkat lunak CFD yang dapat digunakan
untuk melakukan analisa seperti Ansys CFX, Fluent, Foltrant, Shipflow dan lain-lain. Pada
pengerjaan Tugas Akhir ini digunakan Ansys CFX untuk analisa aliran fluida beserta
distribusi tekanan dan kecepatan disekitar badan kapal katamaran Simetris.
3.1.1 Persamaan Dasar Dinamika Fluida dalam CFD
Computational Fluid Dynamics merupakan suatu program yang dapat digunakan
untuk menganalisa aliran fluida beserta karakteristik yang ditimbulkan akibat bergeraknya
suatu benda pada fluida tersebut. Persamaan dasar yang digunakan pada CFD merupakan
persamaan yang didasarkan pada dinamika fluida yaitu persamaan kontinuitas, momentum
dan energi. Persamaan-persamaan tersebut merupakan pernyataan matematis dari tiga
prinsip dasar fisika sebagai berikut:
1. Hukum kekekalan massa
2. Hukum kedua Newton, F = m.a
3. Hukum kekekalan energi

20
Pada proses mendapatkan persamaan gerak fluida maka terdapat tiga hal yang harus
menggunakan prinsip-prinsip sebagai berikut:
1. Memilih prinsip fisika dasar dari hokum-hukum fisika (hukum kekekalan massa,
hukum kedua Newton dan hukum kekekalan energi).
2. Menetapkan prinsip-prinsip fisika tersebut dalam pemodelan aliran.
3. Pada penerapan ini, dapat diuraikan persamaan matematis yang meliputi prinsip-
prinsip fisika.
Pada proses pemodelan aliran maka dapat digunakan beberapa metode yaitu
metode kontrol volume dan metode elemen fluida. Pemilihan metode aliran dapat
dijelaskan melalui gambar dibawah ini.
Gambar 3.2 Model-model aliran (a & b) pendekatan control volume hingga, (c &
d) model-model pendekatan elemen fluida tak hingga (Anderson, 1995)
Pada pemodelan dengan menggunakan prinsip (a) dan (c) maka dapat diperoleh
persamaan yang disebut dengan conservation form. Sedangkan pemodelan dengan
menggunakan prinsip (b) dan (d) maka akan diperoleh persamaan yang disebut non-

21
conservation form. Dari penurunan keempat model tersebut, pada dasarnya akan
menghasilkan persamaan yang sama tetapi dengan proses matematis yang berbeda.
3.1.2 Penurunan Persamaan Aliran Viskos (Navier-Stokes)
Persamaan Navier-stokes (PNS) adalah sistem persamaan differensial non-linier yang
mendeskripsikan bagaimana fluida mengalir.
Penurunan persamaan Navier - Stokes dimulai dengan penerapan hukum kedua
Newton : kekekalan momentum (sering bersama massa dan konservasi energi ) yang ditulis
untuk bagian sewenang-wenang dari fluida. Dalam kerangka acuan inersia , bentuk umum
dari persamaan gerak fluida adalah :
di mana
ρ adalah densitas fluida,
adalah derivatif substantif (dikenal juga dengan istilah derivatif dari
material)
v adalah vektor kecepatan,
f adalah vektor gaya benda, dan
adalah tensor yang menyatakan gaya-gaya permukaan yang bekerja
pada partikel fluida.
Sisi kiri dari persamaan menggambarkan percepatan, dan dapat terdiri dari waktu
tergantung atau konvektif efek (juga efek dari koordinat non-inersia jika ada). Sisi kanan
dari persamaan ini berlaku penjumlahan kekuatan tubuh (seperti gravitasi) dan divergensi
stres (tekanan dan tegangan geser).
Aliran viscous merupakan aliran yang dapat dijelaskan dengan menggunakan
persamaan aliran dengan memperhitungkan fenomena pemindahan gesekan (friction),
konduksi/hantaran panas dan atau penyebaran massa.

22
3.2 CFD-Ansys CFX
Pada proses penyelesaian masalah dengan menggunakan CFD-Ansys CFX terdapat
tiga tahap yang harus dilalui, yaitu: Pre-processor, Flow Solver (Solution), dan Post
Processor.
A. Tahap Pre-Processor
Merupakan tahap dimana data diinput mulai dari pembuatan domain serta
pembuatan kondisi batas atau boundary condition. Ditahap ini juga sebuah benda
atau ruangan yang akan dianalisa dibagi-bagi dengan jumlah grid tertentu atau
sering juga disebut dengan meshing. Secara umum, tahap ini terdiri dari:
1. Pemodelan kapal
2. Pembuatan domain fluida
3. Pemodelan kondisi batas
4. Optimasi model yang optimum
5. Pemihan jumlah grid yang optimum
B. Tahap Flow Solver (Solution)
Pada tahap ini dilakukan proses penghitungan data-data input dengan persamaan
yang terlibat secara iteratif. Artinya penghitungan dilakukan hingga hasil menuju
error terkecil atau hingga mencapai nilai yang konvergen. Pada tahap ini dilakukan
perhitungan secara numerik untuk menyelesaikan masalah dengan CFD. Secara
umum tahap ini terdiri dari:
1. Penentuan kondisi batas
2. Pemilihan jenis fluida
3. Penentuan kecepatan model
4. Pemilihan jumlah iterasi yang optimum
5. Penentuan batas konvergensi yang optimum
C. Tahap Post Processor
Tahap Post-Processor merupakan tahap yang digunakan untuk menganalisis,
visualisasi dan mempresentasikan hail interaktif sesuai dengan kasus yang sedang
ditinjau. Hasil perhitungan diinterpretasikan ke dalam gambar, grafik bahkan
animasi dengan pola warna tertentu. Secara umum tahap ini terdiri dari:
1. Perhitungan besar hambatan kapal
2. Perhitungan distribusi kecepatan disekitar badan kapal
3. Perhitungan distribusi tekanan disekitar badan kapal

23
3.3 Model Kapal
Pada proses permodelan, pemodelan kapal dibuat dengan beberapa model yaitu
model demihull (monohull) dan katamaran. Pemodelan kapal dilakukan dengan
menggunakan software Ansys ICEM CFD. Model kapal katamaran dibuat dengan tiga
variasi jarak demihull (S/L) yaitu 0.2; 0.3 dan 0.4.
Terdapat 2 macam pemodelan yang harus dibuat untuk melakukan analisa
hambatan katamaran Simetris dengan menggunakan CFD-Ansys CFX. Model pertama
merupakan pemodelan dengan mendefinisikan bahwa seluruh badan kapal dibawah
permukaan air atau sarat terbenam. Pemodelan ini dilakukan untuk mendapatkan hambatan
viskos dari model kapal.
Gambar 3.3 Pemodelan tanpa free surface.
Model kedua merupakan pemodelan dengan menerapkan free surface yaitu
pemodelan kapal dengan menggunakan dua fluida. Pemodelan dengan menggunakan dua
fluida menggunakan fluida air dan udara dalam proses simulasi. Pemodelan dengan
menerapkan kondisi ini memungkinkan diperoleh hambatan total kapal tanpa mengabaikan
adanya beberapa air yang naik dari batas sarat kapal.
Gambar 3.4 Pemodelan dengan free surface.

24
Pemodelan untuk kedua jenis model tersebut dimodelkan dengan menggunakan
grid tertrahedral untuk bentuk-bentuk unstructural yang digunakan dengan the viscous flow
code untuk komputasi domain dan menggunakan grid quadrilateral dengan the potential
flow code untuk pemodelan kapal dan permukaan air disekitar badan kapal (Jamaluddin,
dkk). Hal ini berhubungan dengan kualitas grid yang digunakan untuk konvergensi dan
keakuratan perhitungan CFD dimana kualitas grid dibahas secara lebih terperinci oleh
Thompson dkk. (1999) dan Deng dkk. (2010).
Pemodelan tidak hanya dilakukan pada kapal tetapi juga pada pemodelan domain.
Domain didefinisikan sebagai lingkup atau tempat untuk kapal dilakukan simulasi dalam
hal ini domain menginterpretasikan fluida yang dilalui oleh kapal. Proses permodelan
domain dilakukan dengan beberapa tahapan untuk mendapatkan ukuran domain yang
optimum. Ukuran domain yang optimum akan digunakan sebagai acuan dan juga
digunakan sebagai domain utama untuk perhitungan pada proses simulasi untuk semua
variasi.
Ukuran domain untuk simulasi dengan seluruh badan kapal sampai dengan sarat
kapal terbenam air untuk mendapatkan hambatan viskos kapal maka menggunakan ukuran
panjang domain kedepan dari kapal sebesar 2 Lwl, panjang kebelakang dari kapal sebesar
3 Lwl, panjang dari sisi-sisi kapal sebesar 1.5 Lwl dan dengan kedalaman domain yang
cukup dari permukaan domain.
3 Lwl 1 Lwl
2 Lwl
Gambar 3.5 Dimensi domain untuk pemodelan tanpa free surface.
Dimensi domain untuk simulasi dengan menggunakan free surface yaitu dengan
menggunakan dua fluida untuk mendapatkan hambatan total kapal maka menggunakan
ukuran panjang domain kedepan dari kapal sebesar 2 Lwl, panjang ke belakang dari kapal

25
3 Lwl, panjang dari sisi-sisi kapal sebesar 1.5 Lwl dan dengan kedalama yang cukup dari
permukaan domain.
7 T
Gambar 3.6 Dimensi domain untuk pemodelan dengan free surface.
3.4 Boundary Condition
Pada proses pendefinisian masalah dalam proses simulasi maka setiap bagian dari
model dan domain harus didefinisikan agar hasil yang diperoleh memiliki tingkat validitas
yang tinggi. Kondisi batas untuk pemodelan tanpa free surface dan dengan menggunakan
free surface akan berbeda. Kedua pemodelan tersebut dilakukan proses simulasi pada
berbagai kecepatan dengan variasi Fr = 0.19-0.65.
Pada pemodelan tanpa free surface, kondisi batas terdiri dari inlet, outlet, wall dan
model itu sendiri yaitu kapal katamaran Simetris . Kondisi batas inlet didefinisikan sebagai
tempat masuknya fluida pada proses simulasi. Pada daerah ini kecepatan mengalirnya
fluida didefinisikan untuk menginterpretasikan besar laju dari fluida yaitu air.
Gambar 3.7 Kondisi batas untuk pemodelan tanpa free surface.

26
Daerah sebagai tempat keluarnya fluida didefinisikan sebagai outlet sehingga pada
daerah ini besarnya tekanan perlu didefinisikan. Kondisi batas wall termasuk daerah
bottom, top dan sidewall didefinisikan sebagai dinding-dinding pembatas domain pada saat
proses simulasi. Kondisi batas pada daerah ini dianggap bahwa kekasaran dari dinding
tidak berpengaruh terhadap besarnya kecepatan fluida yang mengalir sehingga laju fluida
tidak akan mengalami perlambatan kecepatan akibat kekasaran dinding. Berbeda dengan
kondisi batas dari wall, kondisi batas untuk kapal didefinisikan bahwa kekasaran
permukaan badan kapal akan berpengaruh terhadap besarnya laju fluida. Hal ini berarti,
laju fluida akan mengalami perlambatan akibat pengaruh kekasaran badan kapal yang
kemudian CFD mendefinisikan hal tersebut pada proses perhitungan sebagai gaya yang
menghambat laju kapal sehingga diperoleh besarnya hambatan viskos kapal.
Menurut penelitian yang telah dilakukan oleh Jamaluddin, dkk (2011) pada
pemodelan dengan free surface, kondisi batas terdiri dari inlet, outlet, wall dan model yaitu
kapal katamaran Simetris dimana kondisi batas inlet didefinisikan sebagai tempat
masuknya fluida atau disebut sebagai hulu (downstream) pada proses simulasi. Pada
kondisi ini besarnya kecepatan fluida (sama dengan kecepatan model) dan ketinggian
aliran didefinisikan pada bagian ini. Kondisi batas outlet didefinisikan sebagai tempat
keluarnya fluida dan besarnya komponen tekanan hidostatis perlu didefinisikan pada
daerah ini dan diasumsikan an undisturbed free surface.
Gambar 3.8 Kondisi batas untuk pemodelan dengan free surface.
Pengaruh kekasaran dinding terhadap besarnya laju fluida didefinisikan pada model
kapal sehingga sama seperti halnya pada pemodelan tanpa free surface, pada pemodelan

27
dengan free surface besarnya laju fluida akan mengalami perlambatan akibat kekasaran
dari badan kapal. Pada bagian dasar dari domain dan sisi dari domain sebagai bottom dan
sidewall didefinisikan bahwa pengaruh kekasaran dinding pada daerah ini tidak
berpengaruh pada besarnya laju fluida sehingga laju fluida tidak akan mengalami
perlambatan jika melewati daerah ini.
Perhitungan kondisi dua fluida pada pemodelan free surface didefinisikan
menggunakan kondisi batas a pressure opening yang diterapkan pada bagian atas dari
domain (top surface). Penerapan kondisi batas ini memungkinkan bahwa tidak terdapat air
yang mencapai top surface. Kondisi opening juga digunakan sebagai titik acuan untuk
tekanan.
Kondisi air dimodelkan sebagai fresh water pada temperature 26 C (massa jenis =
999 kg/m3, dynamic viscosity = 1.137 x 10-3 kg/ms). Kondisi udara diasumsikan
compressible (untuk alasan stabilitas komputasi) dan dimodelkan dengan massa molekul
28.96 kg/mole dan dynamic viscosity = 1.8 x 10-5 kg/ms.
Setelah penerapan kondisi batas pada setiap bagian dari domain, langkah
selanjutnya adalah pemilihan model turbulen yang digunakan dan penentuan batas kriteria
konvergensi. Pemilihan model turbulen didasarkan bahwa untuk memecahkan persamaa
yang mengatur fluida, domain fluida dibagi kedalam jumlah sel yang terbatas dan
persamaan ini dirubah kedalam bentuk aljabar melalui proses diskritisasi dimana
menggunakan mentode finite volume (Jamaluddin dkk., 2011). Model turbulen untuk awal
simulasi adalah Shear Stress Transport (SST) seperti yang telah diaplikasikan oleh Menter
(1993a, 1994b).
Pada berbagai penelitian telah banyak dijelaskan mengenai model turbulen dengan
menggunakan SST. Model SST merupakan model yang paling akurat untuk digunakan
pada pemodelan aliran pada NASA Technical Memorandum (Bardina, dkk, 1997). Model
ini pada awalnya banyak digunakan untuk bidang aeronatika tetapi dengan berkembangnya
teknologi, model ini banyak digunakan pada berbagai model industri. Model turbulen ini
memecahkan turbulensi berbasis (k-) pada dinding-dinding dan turbulensi berbasis (k-)
pada aliran massal (Jamaluddin dkk., 2011).
Langkah selanjutnya adalah penetuan batas criteria konvergensi. Penentuan batas
kriteria konvergensi yaitu Root Mean Square (RMS) untuk proses simulasi dengan
residual target value sebesar 10-5. Nilai ini merupakan nilai konvergensi terbaik dan telah

28
banyak digunakan pada berbagai perhitungan aplikasi teknik (Ansys, 2007; Dinham dkk.,
2008).
3.5. Verifikasi Hasil CFD
Proses verifikasi perlu dilakukan untuk pengujian model kapal melalui komputer.
Verifikasi merupakan terminologi untuk menunjukkan tingkat kebenaran dari simulasi
yang dilakukan. Untuk menentukan tingkat kevalidan, dapat dilakukan dengan beberpat
metode yaitu memastikan semua boundary condition dan inisialisasi telah sesuai dengan
teori dan kasus yang ditinjau serta dengan cara membandingkan dengan sebuah
acuan/standart yang telah ada dengan referensi yang jelas. Verifikasi pengujian komputer
dilakukan dengan membandingkan hasil pengujian simulasi model kapal dikomputer
dengan pengujian model kapal pada kolam pengujian.
Penyelidikan secara numerik dimulai dengan Pre processing yang meliputi
pembuatan geometri benda, inisialisasi boundary condition, dan meshing. Hasil yang
diharapkan adalah adanya simulasi dinamis/transient, sehingga akan dipilih mode
unstructured mesh atau dynamic mesh dalam meshing geometri.
Langkah berikutnya adalah tahap pemilihan solver yang meliputi pemilihan
boundary condition, pemilihan model, pemilihan jenis fluida dan struktur, dan pemilihan
solving equation. Penyelesaian persamaan akan menggunakan fasilitas multi-field solver
untuk menggabungkan dua field yang berbeda dalam interaksi fluida-struktur. Tujuan yang
ingin didapatkan dalam simulasi numerik ini adalah mendapatkan gaya/ hambatan pada
lambung kapal dan fenomena interferensi hambatannya dengan mengetahui kecepatan
aliran disekitar lambung dan perubahan tekanan diantara lambungnya dengan
memvariasikan jarak antara lambung.
Dalam simulasi yang dihasilkan akan diketahui besarnya gaya-gaya yang bekerja
pada lambung demihull/ catamaran. Selanjutnya akan dilakukan analisa dan evaluasi data
hasil numerik dan dibandingkan dengan hasil pengukuran eksperimen.
Computational Fluid Dynamics merupakan merupakan penyelesaian numerik
dinamika fluida Bertram (2000). Pada kasus kapal, CFD sangat membantu dalam meng-
ekspresikan fenomene aliran fluida di sekitar lambung kapal, khususnya masalah interfensi
dan interaksi komponen hambatan pada lambung.
Dalam desain kerjanya, problem perlu dideskripsikan dengan menggambarkan
model yang akan dianalisa, sifat-sifat fluida di sekitar model dan penentuan kondisi

29
batasannya. Selanjutnya dalam solver problem akan dihitung dengan pendekatan Navier
Strokes yaitu persamaan kekekalan massa, momentum, dan energi pada setiap titik pada
grid 2D atau 3D. Dari hasil perhitungan tersebut akan didapat hasil output dari simulasi
program CFD.
Keakurasian hasil analisis CFD ditentukan oleh 3 (tiga) faktor (Ansys CFX, 2007)
yaitu:
1. Konvergensi, yaitu analisis kebenaran internal dimana tingkat kesalahan yang
dirancang dipenuhi oleh model yang dikembangkan. Jika nilai konvergensi /
variable value dibawah 10-4.
2. Studi grid independence, yaitu pengetahuan tentang efisiensi pemakaian grid.
3. Verifikasi, yaitu membandingkan hasil CFD dengan data lain yang ada sehingga
secara realistis kebenaran dapat diterima.

30
Halaman ini sengaja dikosongkan
31
BAB-4
METODOLOGI PENELITIAN
Dalam menyelesaikan Tugas Akhir ini digunakan metode analisa, simulasi, dan
perhitungan secara matematis dengan tahapan-tahapan sebagai berikut:
4.1 Studi Literatur
Studi literatur yang dilakukan berkaitan dengan konsep hambatan kapal monohull,
hambatan kapal katamaran terutama kapal katamaran Simetris, sistem gelombang yang
dihasilkan oleh kapal serta interferensi baik akibat bentuk badan kapal maupun
gelombang yang dihasilkan. Studi dilakukan dengan referensi dari penelitian-penelitian
yang telah dilakukan sebelumnya, buku-buku literatur dan pencarian data lewat internet.
4.2 Pengumpulan Data
Data yang diperlukan untuk mengerjakan Tugas Akhir dikumpulkan dari berbagai
sumber antara lain melalui referensi penelitian sebelumnya dan browsing data dari
internet. Data yang dibutuhkan seperti data ukuran utama kapal dan hasil pengujian
towing tank oleh penelitian yang telah dilakukan sebelumnya.
4.3 Pembuatan Geometri Model Kapal
Pembuatan geometri badan kapal dilakukan dengan menggunakan data kapal yang
sesuai dengan penelitian sebelumnya yaitu pada pengujian towing tank dengan variasi
jarak demihull (S/L): 0.2, 0.3 dan 0.4 pada berbagai variasi kecepatan pada Froude
Number (Fn): 0.19-0.65. Pembuatan geometri kapal dilakukan dengan menggunakan
bantuan software Maxsurf dan Ansys ICEM CFD.
Pemilihan NURB surface pada pemodelan kapal dengan software Maxsurf
bertujuan agar betuk badan kapal mendekati bentuk model kapal. Setiap bagian dari
model harus dibuat sedemikian rupa sehingga dapat dikatakan sesuai dengan pengujian
model kapal sehingga mampu mempresentasikan kondisi model yang sebenarnya.
Bagian-bagian dari model seperti fluida dan model kapal dibuat melalui Ansys ICEM
32
CFD. Bagian-bagian ini menterjemahkan perilaku dan kondisi fluida maupun kapal disaat
simulasi kapal mulai dilakukan.
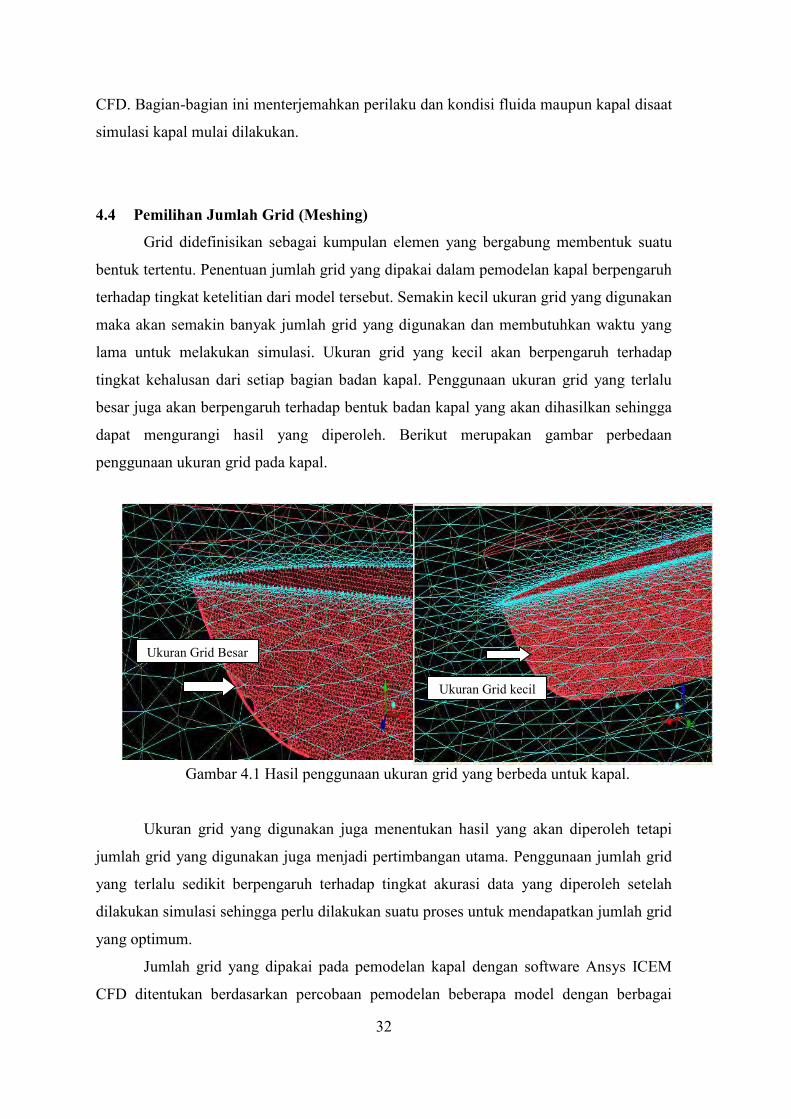
4.4 Pemilihan Jumlah Grid (Meshing)
Grid didefinisikan sebagai kumpulan elemen yang bergabung membentuk suatu
bentuk tertentu. Penentuan jumlah grid yang dipakai dalam pemodelan kapal berpengaruh
terhadap tingkat ketelitian dari model tersebut. Semakin kecil ukuran grid yang digunakan
maka akan semakin banyak jumlah grid yang digunakan dan membutuhkan waktu yang
lama untuk melakukan simulasi. Ukuran grid yang kecil akan berpengaruh terhadap
tingkat kehalusan dari setiap bagian badan kapal. Penggunaan ukuran grid yang terlalu
besar juga akan berpengaruh terhadap bentuk badan kapal yang akan dihasilkan sehingga
dapat mengurangi hasil yang diperoleh. Berikut merupakan gambar perbedaan
penggunaan ukuran grid pada kapal.
Gambar 4.1 Hasil penggunaan ukuran grid yang berbeda untuk kapal.
Ukuran grid yang digunakan juga menentukan hasil yang akan diperoleh tetapi
jumlah grid yang digunakan juga menjadi pertimbangan utama. Penggunaan jumlah grid
yang terlalu sedikit berpengaruh terhadap tingkat akurasi data yang diperoleh setelah
dilakukan simulasi sehingga perlu dilakukan suatu proses untuk mendapatkan jumlah grid
yang optimum.
Jumlah grid yang dipakai pada pemodelan kapal dengan software Ansys ICEM
CFD ditentukan berdasarkan percobaan pemodelan beberapa model dengan berbagai
Ukuran Grid kecil
Ukuran Grid Besar
33
variasi jumlah grid yang selanjutnya dilakukan optimisasi hingga didapatkan jumlah grid
yang optimum. Jumlah grid yang optimum merupakan jumlah grid yang digunakan tidak
berpengaruh terhadap besarnya hasil yang didapatkan. Proses mendapatkan jumlah grid
optimum disebut dengan Grid Independen Study. Grid Independen merupakan salah satu
parameter yang digunakan pada tahap validasi data hasil simulasi numerik menggunakan
ANSYS CFD.
4.5 Pendefinisian Model
Setiap bagian yang telah dibuat dalam software Ansys ICEM CFD harus
didefinisikan terlebih dahulu agar didapatkan data sesuai dengan data percobaan
sesungguhnya. Pendefinisian model dalam hal ini berupa pemberian kondisi batas dari
model yang akan dilakukan simulasi. Kondisi batas dapat berupa kondisi dari aliran
fluida, kondisi kekasaran badan kapal, kondisi massa jenis fluida, kondisi tekanan udara
dan lain-lain.
Pendefinisian model dilakukan dengan menggunakan software Ansys CFX. Pada
proses ini, kapal diasumsikan diam sedangkan fluida diasumsikan sebagai bagian yang
bergerak. Oleh karena itu data kondisi batas seperti kecepatan diterapkan pada domain
yaitu fluida.
Proses simulasi kapal dengan menggunakan CFD-Ansys CFX dilakukan dengan 2
metode simulasi yaitu dengan menggunakan free surface dan tanpa free surface. Simulasi
dengan menggunakan free surface merupakan salah satu metode dengan menerapkan
kondisi 2 fluida (air dan udara) tanpa mengabaikan luapan air hingga diatas batas sarat
kapal sehingga dapat diperoleh besarnya hambatan total kapal. Sedangkan penggunaan
prinsip tanpa free surface merupakan metode dengan menerapkan kondisi 1 fluida (air)
dengan mengabaikan luapan air yang melewati batas sarat sehingga analisa hambatan
hanya diterapkan pada bagian badan kapal yang trercelup kedalam air. Hal ini
memungkinkan untuk memperoleh hambatan viskos kapal dari proses simulasi kapal.
Bagian utama yang harus diterapkan dalam proses simulasi adalah penerapan
kondisi batas untuk domain. Pada simulasi tanpa free surface, jenis fluida yang dipakai
hanya air sedangkan pada simulasi dengan free surface, jenis fluida yang dipakai adalah
air dan udara.
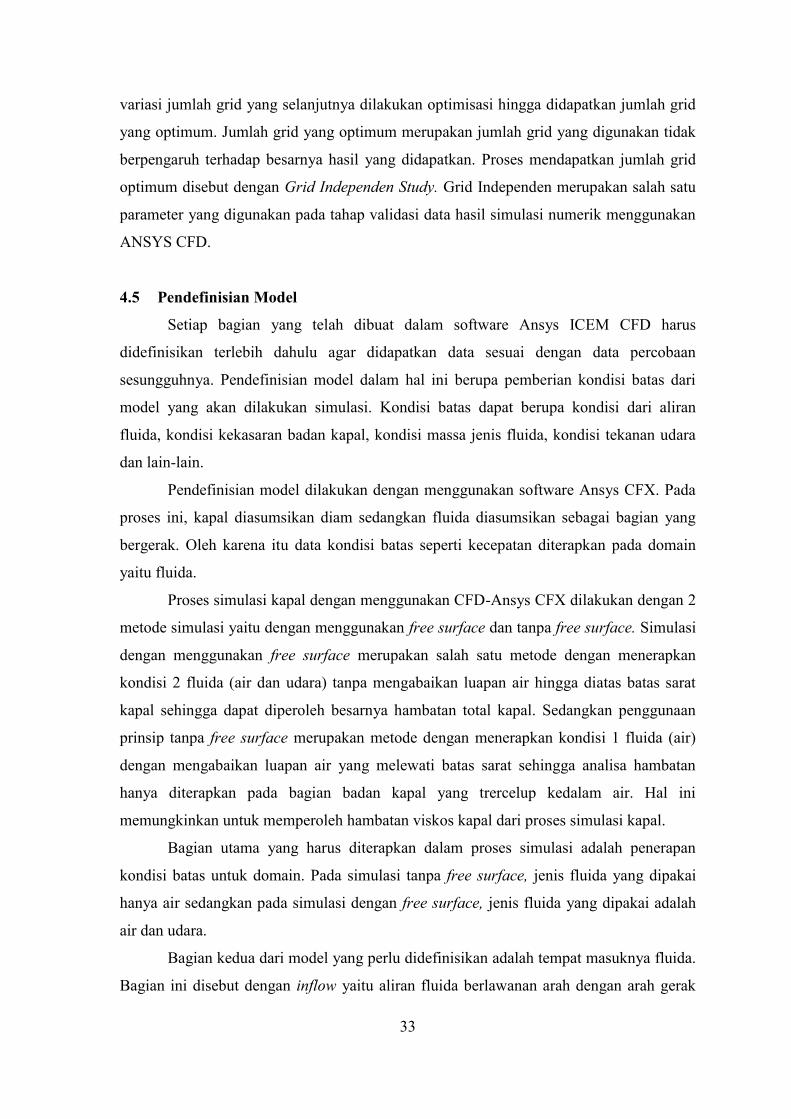
Bagian kedua dari model yang perlu didefinisikan adalah tempat masuknya fluida.
Bagian ini disebut dengan inflow yaitu aliran fluida berlawanan arah dengan arah gerak
34
kapal. Terdapat perbedaan penerapan kondisi batas inflow untuk kedua proses simulasi.
Pada simulasi tanpa free surface, kondisi batas yang harus diterapkan seperti lokasi dari
tempat masuknya fluida (air) dan kecepatan. Data kecepatan diambil sesuai dengan data
kecepatan dari kapal. Pada metode ini, tidak terdapat penerapan kondisi batas udara
sehingga kondisi batas diterapkan pada badan kapal yang tercelup didalam air.
Pada simulasi dengan free surface, penerapan kondisi batas untuk inflow adalah
ketinggian aliran fluida (air dan udara), tekanan udara, gaya gravitasi, suhu fluida dan
model turbulen yang perlu diterapkan. Penerapan kondisi batas ini memungkinkan untuk
penerapan kondisi 2 fluida pada proses simulasi sehingga analisa tidak hanya dilakukan
pada badan kapal dibawah sarat tetapi juga pada badan kapal diatas sarat.
Gambar 4.2 Lokasi Kondisi Batas Inlet tanpa free surface.
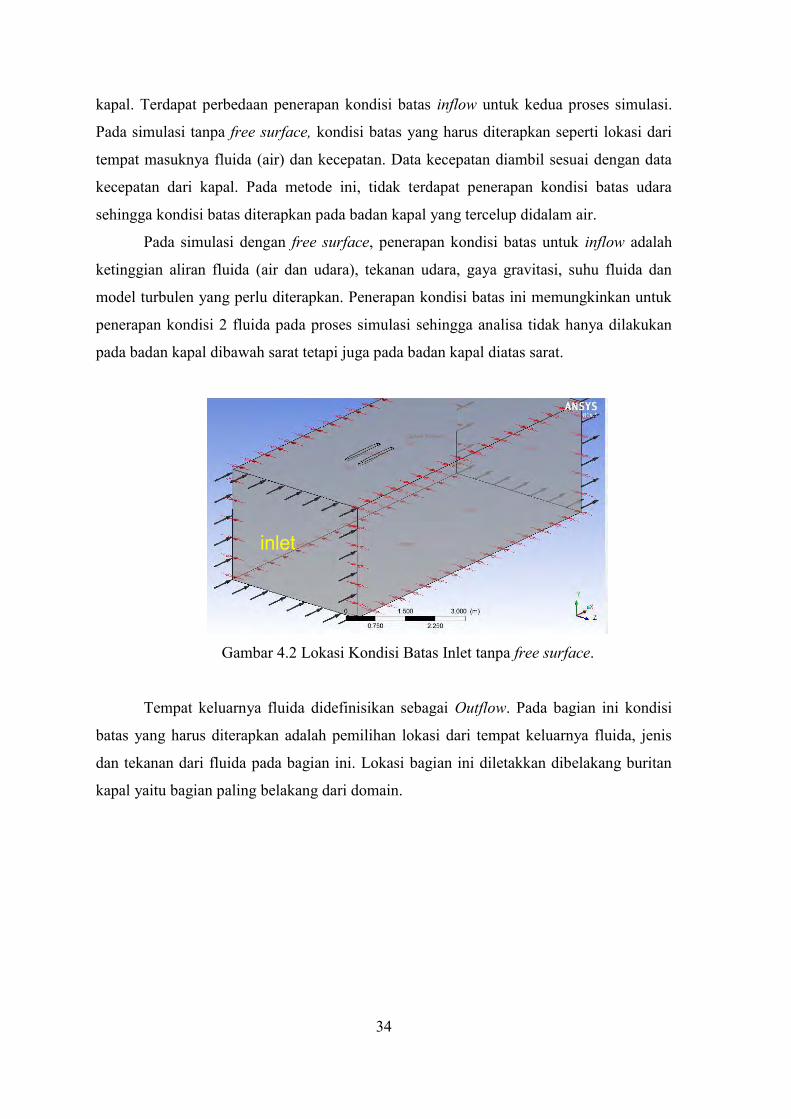
Tempat keluarnya fluida didefinisikan sebagai Outflow. Pada bagian ini kondisi
batas yang harus diterapkan adalah pemilihan lokasi dari tempat keluarnya fluida, jenis
dan tekanan dari fluida pada bagian ini. Lokasi bagian ini diletakkan dibelakang buritan
kapal yaitu bagian paling belakang dari domain.

35
Gambar 4.3 Lokasi Kondisi Batas Outflow.
Jenis tekanan pada bagian ini menggunakan static pressure yang berarti tekanan
statis karena tidak adanya tekanan yang timbul akibat gelombang yang dihasilkan oleh
badan kapal. Hal ini diasumsikan bahwa pada bagian ini gelombang yang dihasilkan
akibat gerak kapal sudah tidak terbentuk sehingga tidak terjadi fenomena kembalinya
gelombang yang dapat mengurangi tingkat akurasi dari hasil yang diperoleh.
Bagian-bagian dinding dari domain dianggap sebagai wall. Penerapan kondisi
batas pada bagian ini adalah kondisi batas untuk lokasi dari bagian ini dan pengaruh
tidaknya kekasaran dari dinding. Lokasi dari bagian ini adalah semua dinding-dinding
dari domain kecuali lokasi untuk inflow dan outflow yaitu bagian atas (top), bagian bawah
(ground/bottom), bagian kanan kapal (right wall) dan bagian kiri kapal (left wall).
Pengaruh kekasaran dari dinding kapal pada bagian ini dianggap tidak memiliki
pengaruh terhadap aliran fluida. Pada bagian ini kondisi batas yang diterapkan adalah free
slip yang berarti kecepatan fluida yang mendekati bagian ini tidak akan mengalami
perlambatan sehingga dengan kata lain pada bagian ini tidak memiliki kekasaran.
Penerapan kondisi batas seperti ini membuat dinding-dinding ini tidak memiliki pengaruh
tekanan sehingga hasil akhir simulasi tidak dipengaruhi oleh tekanan dari dinding-dinding
ini.

36
Gambar 4.4 Salah satu contoh lokasi kondisi batas wall.
Pada bagian kapal, kondisi batas yang perlu diterapkan adalah pengaruh kekasaran
badan kapal terhadap aliran fluida sehingga badan kapal pada tahap ini dianggap sebagai
dinding dan lokasi untuk kondisi batas ini. Penerapan dinding pada bagian ini berbeda
dengan penerapan kondisi batas untuk dinding-dinding di sekeliling domain.
Gambar 4.5 Lokasi Kondisi Batas Ship.
Lokasi dari kondisi batas ini adalah pada seluruh badan kapal. Kondisi batas yang
diterapkan adalah no slip dengan tingkat kekasaran dinding adalah smooth wall.
Penerapan kondisi ini berarti bahwa badan kapal memiliki kekasaran dan berpengaruh
terhadap aliran fluida disekitar kapal. Hal ini berarti kecepatan fluida yang mendekati
badan kapal akan mengalami perlambatan yang kemudian meghambat laju kapal sehingga
pada akhir simulasi dapat diketahui besarnya gaya yang menghambat laju kapal.

37
4.6 Input Data Analisa dan Pemilihan Turbulensi
Kondisi batas merupakan salah satu hal terpenting dalam persiapan simulasi
numerik. Selain itu terdapat beberapa hal yang harus dipersiapkan juga sebelum proses
perhitungan dimulai. Hal tersebut meliputi input data analisa seperti pemilihan jenis
fluida yang digunakan beserta massa jenis yang digunakan oleh fluida dan pemilihan
metode turbulensi.
Metode turbulensi berpengaruh terhadap proses perhitungan yang akan dilakukan.
Pemilihan metode ini harus disesuaikan dengan kondisi yang ditentukan kepada model.
Pemilihan metode berarti melakukan pemodelan aliran turbulen untuk model yang diteliti.
Aliran turbulen dipilih karena aliran ini mampu mempresentasikan dengan baik fenomena
fisik yang terjadi disekitar model jika dibandingkan dengan aliran laminar.
Terdapat 3 macam metode turbulensi yang dapat digunakan pada proses perhitungan
ini yaitu k-Epsilon, Shear Stress Transport dan Laminar. Pada proses ini dipilih metode
turbulensi Shear Stress Transport dengan basis pemodelan 2 persamaan yang merupakan
salah satu pendekatan dala pemodelan turbulensi dengan metode RANS (Reynold
Average Navier Stokes).
4.7 Flow Solver (Solution)
Proses perhitungan atau disebut sebagai proses iterasi pada tahap flow solver
dilakukan jika semua data kondisi batas telah ditentukan. Banyaknya proses iterasi
berpengaruh terhadap tingkat akurasi yang dapat diperoleh. Penentuan banyaknya iterasi
dipengaruhi oleh tingkat ketelitian dari model yang telah dibuat. Semakin banyak jumlah
grid yang dipakai dalam pemodelan maka semakin banyak pula iterasi yang perlu
dilakukan untuk perhitungan model tersebut. Proses iterasi akan berhenti jika telah
mencapai batas convergence yang telah ditentukan. Pada proses ini perhitungan dilakukan
hingga menuju nilai error terkecil atau didapatkan nilai yang konvergen. Convergence
criteria yang digunakan dalam proses iterasi menggunakan Ansys CFX adalah 10-5.
Berikut merupakan gambar convergence dari hasil proses iterasi model kapal
dengan menggunakan Ansys CFX.

38
Gambar 4.6 Grafik Konvergensi.
4.8 Analisa Hasil
Langkah terakhir dalam simulasi numerik dengan menggunakan Ansys adalah
tahap Post-Processor. Pada tahap ini dilakukan analisa dan visualisasi dari hasil yang
telah diperoleh. Hasil yang telah diperoleh dianalisa melalui software Ansys CFX Post.
Analisa hasil yang diperoleh berupa perhitungan besarnya hambatan kapal akibat dari
kondisi-kondisi batas yang telah diterapkan sebelumnya.
Besarnya tekanan dan kecepatan aliran fluida disekitar fluida dianalisa untuk
mempersentasikan fenomena interferensi yang dihasilkan disekitar badan kapal. Proses
analisa tekanan dan kecepatan aliran fluida disekitar badan kapal dilakukan dengan
memberikan beberapa node dengan parameter yang sama yaitu jarak node terhadap
centreplane kapal dan ukuran dari setiap node dari semua model yang diuji. Visualisasi
aliran fluida disekitar badan kapal dipresentasikan untuk mengetahui pola aliran fluida
disekitar badan kapal akibat bentuk bentuk lambung katamaran Simetris.
10-5, Batas Konvergensi
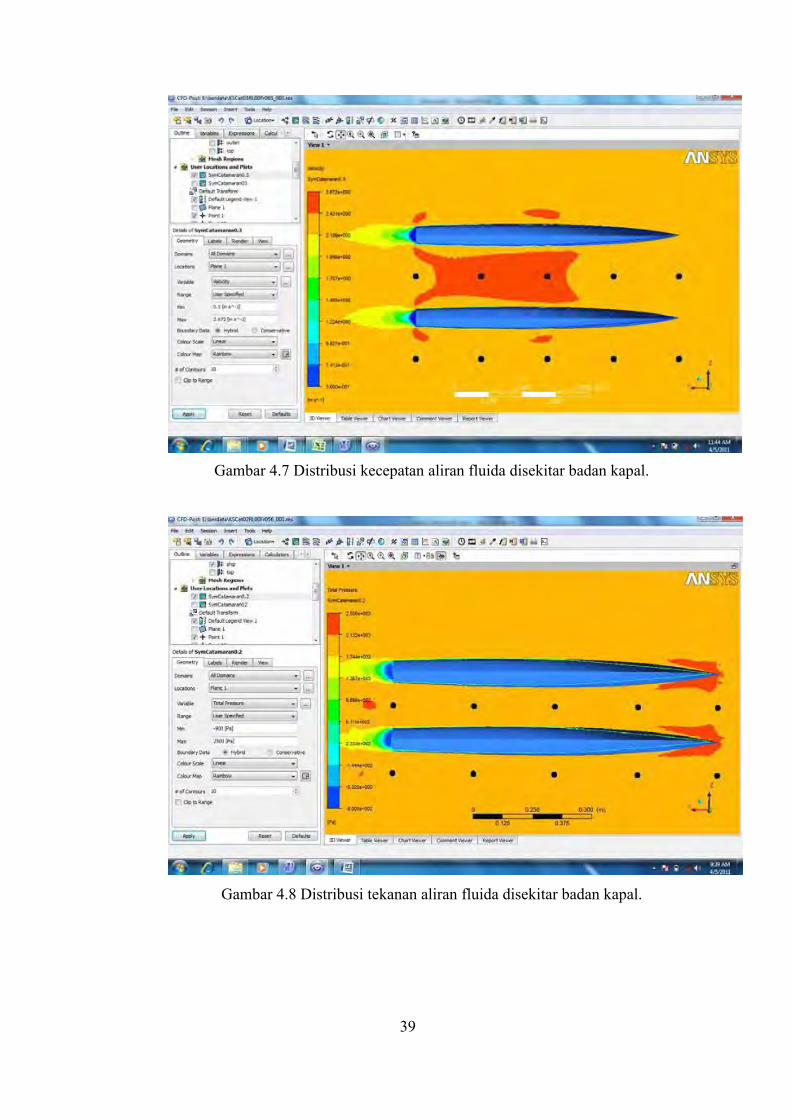
39
Gambar 4.7 Distribusi kecepatan aliran fluida disekitar badan kapal.
Gambar 4.8 Distribusi tekanan aliran fluida disekitar badan kapal.

40
4.9 Validasi Data
Setiap data yang telah didapatkan dari hasil simulasi numerik dengan menggunakan
Ansys CFD harus dilakukan validasi data. Terdapat tiga parameter utama pada tahap
validasi data yaitu :
1. Convergence
2. Grid Independence
3. Verifikasi dengan data hasil eksperimen.
Validasi dengan menggunakan grid independence dan convergence dilakukan
sesuai dengan pembahasan sebelumnya. Validasi data dengan menggunakan data hasil
eksperimen merupakan langkah validasi yang dilakukan dengan cara membandingkan
data hasil perhitungan besarnya hambatan kapal beserta komponennya menggunakan
Ansys CFD dengan besarnya hambatan kapal beserta komponennya menggunakan
pengujian di towing tank. Hasil yang diperoleh harus memiliki trend yang sama sehingga
data yang didapat dapat dikatakan valid atau memenuhi.
4.10 Pengujian Model Katamaran Simetris di Towing Tank
Sebagai data untuk komparasi dari perhitungan hambatan pada hullspeed-maxsurf,
maka dilakukan pengujian model pada towink tank. Towing tank yang dipergunakan
adalah towing tank di Laboraturium Hidrodinamika Indonesia dikarenakan lebar kolam
tersebut memenuhi dalam pengujian model katamaran agar tidak terjadi ombak balik
akibat dinding dari kolam.
Hasil dari pengujian di towing tank berupa hambatan total dan koefisien hambatan
totalnya. Hasil pengujian tersebut nantinya akan dibandingkan dengan hasilperhitungan
hambatanmengunkan hullspeed-maxsurf.
Berikut ini merupakan flowchart proses pengerjaan tugas akhir ini :

41
Gambar 4.9 Digram flowchart pengerjaan Tugas Akhir

42
Halaman ini sengaja dikosongkan

43
Bab 5. DATA HASIL SIMULASI
5.1 Data Hasil Simulasi
Dalam pengerjaan Tugas Akhir ini, perhitungan hambatan kapal dilakukan dengan
menggunakan bantuan software CFD-Ansys CFX. Perhitungan hambatan dilakukan
dengan dua proses simulasi yang berbeda yaitu dengan menggunakan free surface dan
tanpa free surface. Proses simulasi kapal dengan menggunakan free surface,
memungkinkan untuk memperoleh hambatan total kapal dengan kondisi batas yang telah
diterapkan. Penerapan kondisi free surface direkomendasikan pada perhitungan hambatan
kapal dengan analisa CFD sesuai dengan pengujian yang telah dilakukan oleh
Jammaluddin dkk. (2011). Pengujian model kapal tanpa menggunakan free surface,
membuat model kapal memiliki keterbatasan dalam perhitungan hambatan total kapal
sehingga hanya didapatkan hambatan viskos kapal dengan kondisi batas yang berbeda
dengan menggunakan free surface.
Pemodelan kapal menggunakan ukuran utama kapal sesuai dengan ukuran model
kapal katamaran Simetris yang telah dilakukan pengujian hambatan total kapal dengan
menggunakan Towing Tank. Terdapat 2 macam bentuk lambung dalam pengujian ini yaitu
demihull dan lambung katamaran simetris. Berikut adalah data hidrostatik dari kedua
bentuk lambung model.
Tabel 5.1 Data Hidrostatik Demihull Kapal Katamaran simetris
Demihull simetris Displacement 7.226 Kg Volume 0.007 m3 Draft to Baseline 0.126 M Immersed depth 0.126 M Lwl 1.405 M Beam wl 0.066 M WSA 0.357 m2 Max cross sect area 0.007 m2 Waterplane area 0.079 m2 Cp 0.766 Cb 0.606 Cm 0.829 Cwp 0.854

44
Tabel 5.2 Data Hidrostatik Lambung Katamaran Simetris
Lambung Katamaran Simetris Displacement 14.5 Kg Volume 0.014 m3 Draft to Baseline 0.126 M Immersed depth 0.126 M Lwl 1.405 M Beam wl 0.418 M WSA 0.715 m2 Max cross sect area 0.013 m2 Waterplane area 0.158 m2 Cp 0.766 Cb 0.606 Cm 0.829 Cwp 0.854
Perhitungan hambatan kapal melalui analisa CFD dilakukan pada berbagai
kecepatan dengan variasi Froude Number (Fr) dan jarak pisah lambung (S/L). Variasi jarak
pisah lambung dilakukan pada 3 variasi yaitu pada S/L = 0.2; 0.3 dan 0.4.
Gambar 5.1 Konfigurasi Kapal Katamaran
Variasi Froude Number dilakukan pada 6 variasi yaitu 0.19; 0.28; 0.37; 0.46; 0.55
dan 0.65. Dengan menggunakan rumus Fr dari Lewis (1980). Berikut proses perhitungan
untuk mendapatkan kecepatan kapal pada Fn = 0.19.
Fn =
Vs =
=
= 0.688 m/s
Sehingga didapatkan kecepatan kapal Vs = 0.688 m/s.
g.LVs
FnLg ..
19.0.405.181.9 x

45
Dengan cara yang sama untuk semua variasi Froude Number kapal sehingga
dihasilkan data variasi kecepatan kapal untuk proses simulasi.
Tabel 5.3 Data Variasi Kecepatan Kapal.
No. Fn Vship [m/s] 1 0.19 0.688 2 0.28 1.030 3 0.37 1.373 4 0.46 1.717 5 0.55 2.059 6 0.65 2.402
Berikut merupakan data hasil simulasi kapal dengan menerapkan free surface pada
proses simulasi CFD pada berbagai kecepatan dengan variasi Froude Number (Fr) dan
jarak pisah lambung (S/L) pada bare hull condition (tanpa tonjolan badan kapal dan
propeller kapal).
Hambatan Total Kapal pada Demihull
Tabel 5.4 Data Hambatan Total Demihull
No. Fr Vship [m/s] RT [N]
1 0.19 0.688 0.57992 2 0.28 1.030 1.44498 3 0.37 1.373 2.7108 4 0.46 1.717 4.44993 5 0.55 2.059 7.05464 6 0.65 2.402 9.03518
Hambatan Total Kapal Katamaran Simetris dengan S/L = 0.2
Tabel 5.5 Data Hambatan Total Kapal Katamaran Simetris S/L = 0.2
No. Fr Vship [m/s] RT [N]
1 0.19 0.688 1.20415 2 0.28 1.030 2.90756 3 0.37 1.373 5.40362 4 0.46 1.717 9.3338 5 0.55 2.059 13.808 6 0.65 2.402 17.2742
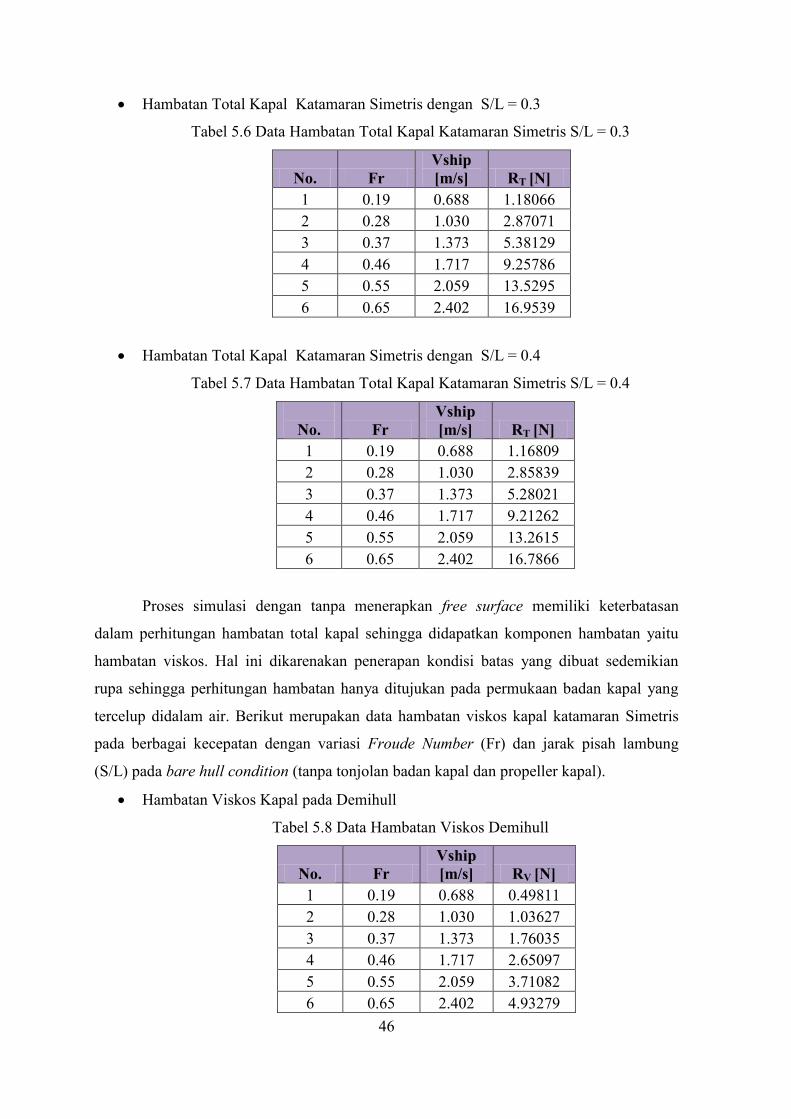
46
Hambatan Total Kapal Katamaran Simetris dengan S/L = 0.3
Tabel 5.6 Data Hambatan Total Kapal Katamaran Simetris S/L = 0.3
No. Fr Vship [m/s] RT [N]
1 0.19 0.688 1.18066 2 0.28 1.030 2.87071 3 0.37 1.373 5.38129 4 0.46 1.717 9.25786 5 0.55 2.059 13.5295 6 0.65 2.402 16.9539
Hambatan Total Kapal Katamaran Simetris dengan S/L = 0.4
Tabel 5.7 Data Hambatan Total Kapal Katamaran Simetris S/L = 0.4
No. Fr
Vship [m/s] RT [N]
1 0.19 0.688 1.16809 2 0.28 1.030 2.85839 3 0.37 1.373 5.28021 4 0.46 1.717 9.21262 5 0.55 2.059 13.2615 6 0.65 2.402 16.7866
Proses simulasi dengan tanpa menerapkan free surface memiliki keterbatasan
dalam perhitungan hambatan total kapal sehingga didapatkan komponen hambatan yaitu
hambatan viskos. Hal ini dikarenakan penerapan kondisi batas yang dibuat sedemikian
rupa sehingga perhitungan hambatan hanya ditujukan pada permukaan badan kapal yang
tercelup didalam air. Berikut merupakan data hambatan viskos kapal katamaran Simetris
pada berbagai kecepatan dengan variasi Froude Number (Fr) dan jarak pisah lambung
(S/L) pada bare hull condition (tanpa tonjolan badan kapal dan propeller kapal).
Hambatan Viskos Kapal pada Demihull
Tabel 5.8 Data Hambatan Viskos Demihull
No. Fr Vship [m/s] RV [N]
1 0.19 0.688 0.49811 2 0.28 1.030 1.03627 3 0.37 1.373 1.76035 4 0.46 1.717 2.65097 5 0.55 2.059 3.71082 6 0.65 2.402 4.93279

47
Hambatan Viskos Kapal Katamaran Simetris dengan S/L = 0.2
Tabel 5.9 Data Hambatan Viskos Kapal Katamaran Simetris S/L = 0.2
No. Fr Vship [m/s] RV [N]
1 0.19 0.688 1.05165 2 0.28 1.030 2.18837 3 0.37 1.373 3.69331 4 0.46 1.717 5.55792 5 0.55 2.059 7.7703 6 0.65 2.402 10.3324
Hambatan Viskos Kapal Katamaran simetris dengan S/L = 0.3
Tabel 5.10 Data Hambatan Viskos Kapal Katamaran simetris S/L = 0.3
No. Fr Vship [m/s] RV [N]
1 0.19 0.688 1.03448 2 0.28 1.030 2.14367 3 0.37 1.373 3.64155 4 0.46 1.717 5.4704 5 0.55 2.059 7.66088 6 0.65 2.402 10.1861
Hambatan Viskos Kapal Katamaran simetris dengan S/L = 0.4
Tabel 5.11 Data Hambatan Viskos Kapal Katamaran simetris S/L = 0.4
No. Fr
Vship [m/s] RV [N]
1 0.19 0.688 1.02905 2 0.28 1.030 2.13476 3 0.37 1.373 3.63027 4 0.46 1.717 5.45515 5 0.55 2.059 7.63755 6 0.65 2.402 10.1607
Proses untuk mendapatkan komponen hambatan yang lainnya dilakukan dengan
menggunakan rumus empiris yang telah banyak digunakan pada penelitian-
penelitian sebelumnya.

48
Koefisien hambatan total, CT, dan koefisien hambatan gesek CV, didefinisikan
sebagai:
(5.1)
(5.2)
Dimana V adalah kecepatan model dan WSA adalah luas permukaan basah pada
kedua permukaan lambung, dalam hal ini lambung katamaran.
Hambatan total (RT) adalah penjumlahan dari wave making (RW) dan hambatan
viskos (RV). Koefisien hambatan total didefinisikan sebagai :
(5.3)
Hambatan viskos untuk demihull (monohull) dan katamaran didefinisikan sebagai :
(CV) mono = (1+k) CF (5.4)
(CV) cat = (1+k) CF (5.5)
Dimana, k merupakan form factor (efek bentuk terhadap gesekan kulit) dan
merupakan interferensi hambatan viskos. Sedangkan CF merupakan koefisien
hambatan gesek.
Koefisien hambatan gesek dihitungan dengan menggunakan rumus empiris ITTC
’57 didefinisikan sebagai:
(5.6)
Sedangkan harga Reynolds Number (Re) didapat dengan menggunakan rumus
empiris sebagai berikut:
Re =υ
V.Lwl (5.7)
Dengan V merupakan kecepatan kapal, Lwl merupakan panjang garis air kapal dan
merupakan kinematic viscosity dengan harga = 1.18831 x 10-6 m/s2.
Dari hasil yang didapatkan sebelumnya yaitu hambatan total dan hambatan viskos
kapal maka dapat diperoleh harga-harga koefisien komponen hambatan. Berikut
merupakan harga koefisien dari komponen-komponen hambatan.

49
Tabel 5.12 Data Koefisien Hambatan Demihull
Fr RT RV CT
(x 10-3) Cv
(x 10-3) CF
(x 10-3) (1+k)
(x 10-3) Cw
(x 10-3) 0.19 0.580 0.498 6.866 5.897 4.91 1202.29 0.969 0.28 1.445 1.036 7.628 5.470 4.49 1217.51 2.158 0.37 2.711 1.760 8.054 5.230 4.23 1236.30 2.824 0.46 4.450 2.651 8.460 5.040 4.04 1246.82 3.420 0.55 7.055 3.711 9.325 4.905 3.9 1258.34 4.420 0.65 9.035 4.933 8.774 4.790 3.78 1266.60 3.984
Tabel 5.13 Data Koefisien Hambatan Kapal Katamaran simetris S/L = 0.2
Fr RT RV CT
(x 10-3) Cv
(x 10-3) CF
(x 10-3) (1+ k) (x 10-3)
Cw (x 10-3)
0.19 1.204 1.052 7.118 6.217 4.91 1267.41 0.969 0.28 2.908 2.188 7.663 5.768 4.49 1283.75 2.158 0.37 5.404 3.693 8.016 5.479 4.23 1295.10 2.824 0.46 9.334 5.558 8.860 5.276 4.04 1305.19 3.420 0.55 13.808 7.770 9.113 5.128 3.9 1315.61 4.420 0.65 17.274 10.332 8.375 5.009 3.78 1324.67 3.984
Tabel 5.14 Data Koefisien Hambatan Demihull Kapal Katamaran simetris S/L = 0.3
Fr RT RV CT
(x 10-3) Cv
(x 10-3) CF
(x 10-3) (1+ k) (x 10-3)
Cw (x 10-3)
0.19 1.181 1.034 6.979 6.115 4.91 1246.71 0.969 0.28 2.871 2.144 7.566 5.650 4.49 1257.53 2.158 0.37 5.381 3.642 7.983 5.402 4.23 1276.95 2.824 0.46 9.258 5.470 8.788 5.193 4.04 1284.64 3.420 0.55 13.521 7.661 8.930 5.056 3.9 1297.09 4.420 0.65 16.954 10.186 8.220 4.939 3.78 1305.92 3.984
Tabel 5.15 Data Koefisien Hambatan Demihull Kapal Katamaran Simetris S/L =
0.4
Fr RT RV CT
(x 10-3) Cv
(x 10-3) CF
(x 10-3) (1+ k) (x 10-3)
Cw (x 10-3)
0.19 1.168 1.029 6.905 6.083 4.91 1240.17 0.969 0.28 2.858 2.135 7.534 5.627 4.49 1252.31 2.158 0.37 5.280 3.630 7.833 5.386 4.23 1272.10 2.824 0.46 9.213 5.455 8.745 5.178 4.04 1281.06 3.420 0.55 13.262 7.638 8.753 5.041 3.9 1293.14 4.420 0.65 16.787 10.161 8.139 4.926 3.78 1302.66 3.984

50
Halaman ini sengaja dikosongkan

51
BAB-6
ANALISA DAN PEMBAHASAN
Pembuatan model dan meshing dilakukan pada Ansys design model (ICEM),
kemudian penyelidikan secara numerik (CFX) dimulai dengan Preprocessing yang
meliputi inisialisasi boundary condition, pemilihan model, pemilihan jenis fluida dan
struktur. Langkah berikutnya adalah tahap pemilihan solver. Tujuan yang ingin didapatkan
dalam simulasi numerik ini adalah mendapatkan gaya/ hambatan pada lambung kapal dan
fenomena interferensi hambatannya dengan mengetahui kecepatan aliran disekitar lambung
dan perubahan tekanan diantara lambungnya dengan meng-variasikan jarak antara
lambung (S/L).
Pada simulasi akan diketahui besarnya komponen hambatan yang bekerja pada
lambung demihull/ catamaran. Simulasi free-surface modelling (pada media air dan udara)
digunakan untuk menghitung besar hambatan total pada lambung. Dinding (wall) untuk
domain fluida pada kondisi free slip yaitu shear stress pada dinding bernilai nol dan
kecepatan di dekat dinding tidak mengalami perlambatan akibat efek gesekan dinding.
Pada simulasi ini, model dibuat dengan kondisi noslip (yaitu terjadi gesekan di permukaan
model). Sedangkan untuk menghitung hambatan viskos, lambung kapal dibenamkan (pada
media air) hingga pada sarat air dengan mengasumsikan kondisi batas atas (top boundary
condition) adalah solid wall dan free slip. Kemudian hambatan gelombang dapat dihitung
dari selisih nilai hambatan total dan hambatan viskos.
Selanjutnya akan dilakukan analisa dan evaluasi data hasil numerik dan
dibandingkan dengan hasil pengukuran eksperimen. Kemudian, melakukan kajian besarnya
nilai faktor interferensi hambatan viskos, lihat Persamaan 2.15, yang terdiri dari faktor
perubahan tekanan disekitar lambung (ø) dan faktor perubahan kecepatan aliran (σ)
diantara lambung kapal dengan mem-variasikan jarak antara lambung karamaran (S/L).
Program CFD terdiri dari 4 (empat) elemen utama :
1. ICEM,yang merupakan desain geometri dan meshing.
2. CFX-pre,adalah boundary condition dan Spesific parameter.
3. Solver,adalah proses iterasi
4. CFX-post, adalah proses analisa.

52
ICEM: penggambaran geometri model, yaitu kumpulan point yang membentuk
curve dan membentuk surface, kemudian proses meshing.
CFX Pre Processor (CFX build): awal pemprograman terdiri dari input masalah
aliran untuk CFD melalui interface. Input meliputi : geometri benda, membentuk grid
generation, penentuan sifat-sifat fluida seperti densitas, viskositas, temperatur fluida.
Kemudian analisa masalah aliran: kecepatan, tekanan didefinisikan sebagai suatu daerah
yang berupa simpul-simpul tiap cell. Jumlah cell dalam grid (mesh) menentukan akurasi
penyelesaian CFD.
Solver (penyelesaian perhitungan): metode numerik solver tersebut terdiri dari
perkiraan variabel yang tidak diketahui dengan menggunakan fungsi sederhana,
diskretisasi dengan substitusi perkiraan-perkiraan tersebut dengan persamaan aliran.
Post Processor : ditampilkan hasil perhitungan yang telah dilakukan pada tahap
sebelumnya, hasil perhitungan dapat dilihat berupa data numerik dan data visual aliran
fluida pada model.
Pada proses validasi ada beberapa parameter penting yang dipertimbangkan yaitu grid
(mesh), convergence, data hasil eksperimen.
6.1 Convergence
Tahap ini, proses iterasi perhitungan akan selalu dikontrol dengan persamaan
pengendali. Jika hasil perhitungan belum sesuai dengan tingkat kesalahan yang ditentukan,
maka komputasi akan terus berjalan. Berikut beberapa grafik RMS yang menunjukkan
convergensi proses iterasi, sebagaimana diperlihatkan pada Gambar 6.1.
Gambar 6.1. Konvergensi proses iterasi pada CFD
10-5, Batas Konvergensi

53
Kriteria root-mean square (RMS) yang digunakan untuk mengecek konvergensi
simulasi free surface adalah dengan residual target value (variable value) mencapai 10-5.
Target criteria (variable value) ini banyak diaplikasi pada komputasi engineering,
sebagaimana yang direkomendasikan dalam ANSYS ICEM manual (2007) dan Dinham dkk
(2008).
6.2 Grid Independence
Besarnya jumlah cell atau grid yang digunakan dalam perhitungan akan
menentukan keakurasian hasil yang diperoleh karena jumlah cell mempengaruhi perubahan
bentuk geometri pada saat pemprosesan hasil. Gambar 6.2 memperlihatkan initial
computational domain. Grid (mesh) di bagian depan lambung berjarak hingga 1.5 panjang
model lambung, di bagian belakang lambung berjarak 4 kali panjang lambung. Kemudian
kesamping berjarak 1.5 kali panjang model, dan jarak di atas 2.5 kali panjang model serta
di bawah 2 kali panjang model lambung. Jarak tersebut sudah cukup memadai untuk
menghindari blockage effect (Utama, 1999; Ahmed dan Soares, 2009). Komputasi untuk
mesh digunakan (multiphase flow calculations) terdiri dari 822,087 dan 1,334,943 mesh
elements untuk demihull dan katamaran seperti yang disajikan pada Tabel 6.1.
Gambar 6.2 Initial computational domain pada CFD
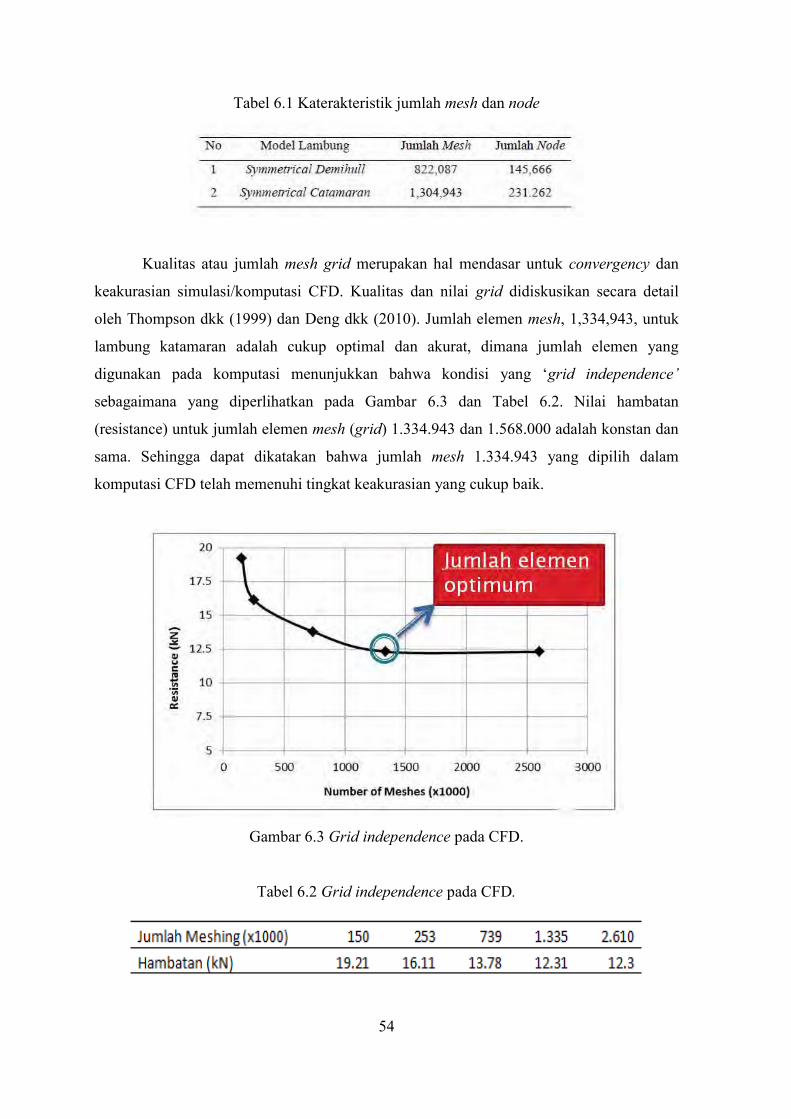
54
Tabel 6.1 Katerakteristik jumlah mesh dan node
Kualitas atau jumlah mesh grid merupakan hal mendasar untuk convergency dan
keakurasian simulasi/komputasi CFD. Kualitas dan nilai grid didiskusikan secara detail
oleh Thompson dkk (1999) dan Deng dkk (2010). Jumlah elemen mesh, 1,334,943, untuk
lambung katamaran adalah cukup optimal dan akurat, dimana jumlah elemen yang
digunakan pada komputasi menunjukkan bahwa kondisi yang ‘grid independence’
sebagaimana yang diperlihatkan pada Gambar 6.3 dan Tabel 6.2. Nilai hambatan
(resistance) untuk jumlah elemen mesh (grid) 1.334.943 dan 1.568.000 adalah konstan dan
sama. Sehingga dapat dikatakan bahwa jumlah mesh 1.334.943 yang dipilih dalam
komputasi CFD telah memenuhi tingkat keakurasian yang cukup baik.
Gambar 6.3 Grid independence pada CFD.
Tabel 6.2 Grid independence pada CFD.
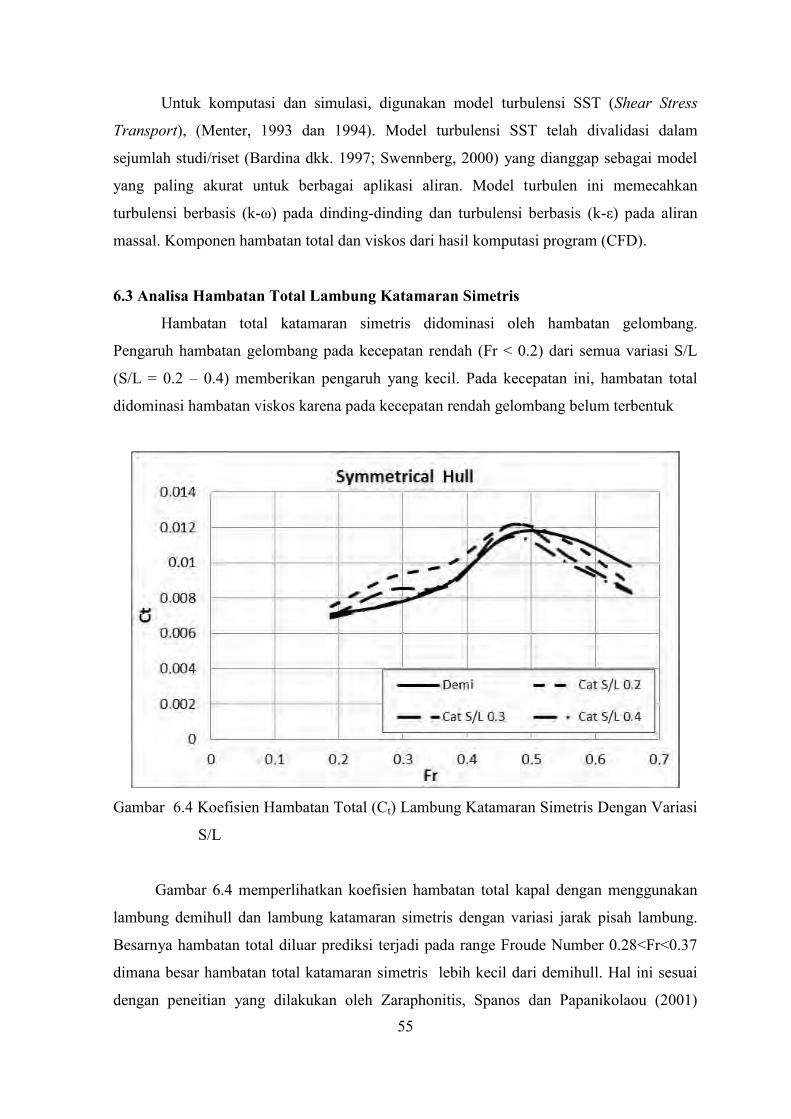
55
Untuk komputasi dan simulasi, digunakan model turbulensi SST (Shear Stress
Transport), (Menter, 1993 dan 1994). Model turbulensi SST telah divalidasi dalam
sejumlah studi/riset (Bardina dkk. 1997; Swennberg, 2000) yang dianggap sebagai model
yang paling akurat untuk berbagai aplikasi aliran. Model turbulen ini memecahkan
turbulensi berbasis (k-ω) pada dinding-dinding dan turbulensi berbasis (k-ε) pada aliran
massal. Komponen hambatan total dan viskos dari hasil komputasi program (CFD).
6.3 Analisa Hambatan Total Lambung Katamaran Simetris
Hambatan total katamaran simetris didominasi oleh hambatan gelombang.
Pengaruh hambatan gelombang pada kecepatan rendah (Fr < 0.2) dari semua variasi S/L
(S/L = 0.2 – 0.4) memberikan pengaruh yang kecil. Pada kecepatan ini, hambatan total
didominasi hambatan viskos karena pada kecepatan rendah gelombang belum terbentuk
Gambar 6.4 Koefisien Hambatan Total (Ct) Lambung Katamaran Simetris Dengan Variasi
S/L
Gambar 6.4 memperlihatkan koefisien hambatan total kapal dengan menggunakan
lambung demihull dan lambung katamaran simetris dengan variasi jarak pisah lambung.
Besarnya hambatan total diluar prediksi terjadi pada range Froude Number 0.28<Fr<0.37
dimana besar hambatan total katamaran simetris lebih kecil dari demihull. Hal ini sesuai
dengan peneitian yang dilakukan oleh Zaraphonitis, Spanos dan Papanikolaou (2001)

56
bahwa antara range Froude Number 0.33<Fr<0.39, katamaran dengan konfigurasi terjadi
efek interferensi antara kedua lambung meskipun sangat lemah yang disebabkan oleh efek
dari the bow-generated waves yang berjalan berlawanan sepanjang kearah butitan. Pada
kombinasi panjang kapal, range kecepatan kapal dan jarak pisah tertentu, gelombang ini
menghasilkan peningkatan diviasi gelombang dan tekanan hidrodinamis didaerah buritan
kapal. Pada range Fr>0.5 menunujukkan hambatan katamaran Simetris jauh lebih kecil
dan pada Fr>0.4 terdapat hasil hambatan katamaran yang sedikit diluar prediksi. Hal ini
diakrenakan semakin besar jarak pisah lambung katamaran maka hambatan gelombang
yang dihasilkan akan semakin kecil dan adanya perbandingan kecepatan dan panjang yang
berpengaruh terhadap terbentuknya gelombang transversal dan gelombang divergen pada
saat nilai perbandingan semakin meningkat sehingga berpengaruh terhadap besarnya
hambatan viskos yang terbentuk pada kecepatan tinggi.
Sesuai dengan penelitian Zaraphonitis, Spanos dan Papanikolaou (2001) bahwa pada
Fn rendah dan tinggi, hambatan katamaran Simetris lebih kecil sedangkan pada Froude
Number Fr>0.4, hambatan katamaran Simetris cenderung memiliki hasil yang sedikit
diluar prediksi. Pada jarak pisah lambung S/L = 0.3, interferensi antar lambung datar kapal
katamaran Simetris masih terjadi meskipun terjadi begitu lemah dan pada jarak pisah
lambung S/L = 0.4, interferensi yang ditimbulkan antar lambung kapal hampir tidak ada
(Zaraphonitis, Spanos dan Papanikolaou, 2001).
6.4 Analisa Perbandingan Hambatan Total Lambung Katamaran Simetris
menggunakan CFD dan Eksperimen
Gambar 6.5 memperlihatkan perbandingan hasil simulasi numerik CFD-Ansys
CFX dengan eksperimen hambatan total demihull Simetris . Terdapat perbedaan yang
semakin bertambah besar pada tiap penambahan kecepatan. Pada bilangan Froude Fr =
0.19, hasil simulasi numerik CFD hampir sama dengan eksperimen meskipun terdapat
perbedaan yang sangat kecil yaitu sebesar 1.51%. Prosentase perbedaan semakin
bertambah besar pada Fr = 0.28 dengan prosentase perbedaan antara kedua pengujian
tersebut adalah sebesar 1.91%. Pada bilangan Froude 0.37 hambatan total demihull
Simetris semakin bertambah besar dengan hasil dari simulasi numerik CFD dengan
prosentase perbedaan dari hasil eksperimen sebesar 2.56%.

57
Gambar 6.5 Perbandingan CFD dan Experiment Hambatan Total
antara Demihull simetris
Penambahan prosentase perbedaan semakin bertambah dengan penambahan sebesar
0.16% dari prosentase sebelumnya. Pada variasi kecepatan selanjutnya yaitu pada Fr =
0.55, prosentase perbedaan hambatan total demihull dibandingkan dengan hasil
eksperimen menjadi sebesar 2.78%. Pada variasi kecepatan terakhir yaitu pada Fr = 0.65,
prosentase perbedaan hasil simulasi numerik dengan hasil eksperimen adalah sebesar
3.2%.
Gambar 6.6 memperlihatkan perbandingan hasil simulasi numerik CFD-Ansys CFX
dengan eksperimen untuk katamaran Simetris pada S/L = 0.2. Perbedaan hasil yang begitu
kecil terlihat pada variasi kecepatan pertama yaitu pada bilangan Froude Fr = 0.19.
Prosentase perbedaan antara hasil simulasi numerik CFD-Ansys CFX dengan eksperimen
pada kecepatan ini sebesar 2.3%.

58
Gambar 6.6 Perbandingan CFD dan Experiment Hambatan Total antara
Katamaran simetris pada S/L = 0.2
Variasi kecepatan selanjutnya yaitu pada bilangan Froude Fr = 0.28
memperlihatkan hasil yang berbeda dengan sebelumnya. Pada variasi kecepatan ini, hasil
yang didapatkan dari simulasi numerik semakin memperlihatkan perbedaan yang besar
dengan hasil eksperimen. Prosentase perbedaan yang antara hasil simulasi CFD-Ansys
CFX dengan eksperimen adalah sebesar 2.7%. Peningkatan kecepatan dengan penggunaan
Fr = 0.37 memperlihatkan hasil dengan perbedaan yang semakin besar dengan prosentase
perbedaan antara hasil simulasi CFD dan hasil eksperimen dengan prosentase perbedaan
sebesar 2.9%. Perbedaan yang tidak begitu signifikan terjadi pada variasi kecepatan
dengan Fr = 0.46. Pada variasi kecepatan ini prosentase perbedaan antara hasil simulasi
dengan hasil eksperimen hanya bertambah sebesar 0.1%. Penambahan prosentase
perbedaan semakin meningkat terjadi pada Fr = 0.55 jika dibandingkan dengan
penambahan pada Fr = 0.46 dengan penambahan prosentase perbedaan sebesar 0.2%.
Prosentase perbedaan terbesar terjadi pada variasi kecepatan dengan Fr = 0.65. Pada
kecepatan ini, prosentase perbedaan antara hasil simulasi CFD dengan hasil eksperimen
adalah sebesar 3.5%.

59
Gambar 6.7 Perbandingan CFD dan Experiment Hambatan Total
antara Katamaran simetris pada S/L = 0.3
Gambar 6.7 memperlihatkan perbandingan hasil simulasi CFD dengan hasil
eksperimen pada katamaran Simetris dengan variasi S/L = 0.3. Pada variasi kecepatan
dengan Fr = 0.19, hasil simulasi CFD memperlihatkan hasil yang lebih besar dibandingkan
dengan hasil eksperimen. Prosentase perbedaan antara kedua hasil tersebut adalah sebesar
2.4%. Prosentase perbedaan antara hasil simulasi CFD dengan hasil eksperimen sebesar
2.9% terjadi pada variasi kecepatan dengan Fr = 0.28. Pada variasi kecepatan selanjutnya
yaitu pada Fr = 0.37, prosentase perbedaan hasil simulasi CFD dengan hasil eksperimen
semakin besar dengan prosentase perbedaan diantara keduanya menjadi sebesar 4.2%.
Penambahan prosentase perbedaan yang tidak begitu signifikasn terjadi pada variasi
kecepatan dengan Fr = 0.46 dengan penambahan sebesar 0.5% dibandingkan dengan
penambahan prosentase sebesar 1.3% yang terjadi pada Fr = 0.37. Pada Fr = 0.55, hasil
simulasi CFD semakin bertambah besar dibandingkan dengan hasil eksperimen dengan
prosentase perbedaan diantara keduanya sebesar 3%. Prosentase perbedaan terbesar terjadi
pada 0.65. Pada variasi kecepatan ini, hasil simulasi CFD semakin bertambah besar
dibandingkan dengan hasil eksperimen dengan prosentase perbedaan diantar keduanya
sebesar 3.6 %.

60
Gambar 6.8 Perbandingan CFD dan Experiment Hambatan Total
antara Katamaran simetris pada S/L = 0.4
Gambar 6.8 memperlihatkan perbandingan hasil simulasi numerik dengan hasil
eksperimen pada katamaran Simetris dengan variasi S/L = 0.4. Pada variasi kecepatan
pertama yaitu pada Fr = 0.19, terdapat perbedaan hasil antara hasil simulasi CFD dengan
hasil eksperimen hampir sama meskipun terdapat perbedaan yang sangat kecil diantara
keduanya dengan prosentase perbedaan sebesar 1.9%. Pada variasi kecepatan dengan Fr =
0.28, perbedaan hasil simulasi CFD semakin besar dibandingkan dengan hasil eksperimen
dengan prosentase perbedaan diantara keduanya sebesar 2.0%. Pada Fr = 0.37, prosentase
perbedaan antara hasil CFD dengan hasil eksperimen mengalami penurunan dibandingkan
dengan hasil sebelumnya. Pada variasi kecepatan ini, prosentase perbedaan yang terjadi
diantara keduanya adalah sebesar 1%. Pada Fr = 0.46, prosentase perbedaan antara hasil
simulasi CFD dengan hasil eksperimen memperlihatkan hasil dengan prosentase perbedaan
terbesar dengan hasil sebelumnya dengan prosentase perbedaan sebesar 4.5%. Penurunan
prosentase perbedaan antara hasil CFD dengan hasil eksperimen terjadi pada kecepatan
dengan Fr = 0.55 dengan prosentase perbedaan diantara keduanya sebesar 2.6%. begitu
juga pada variasi kecepatan selanjutnya yaitu pada Fr = 0.65, prosentase perbedaan yang
terjadi antara hasil simulasi CFD dengan hasil eksperimen adalah sebesar 1.1%.

61
6.5 Analisa Hambatan Viskos Lambung Katamaran Simetris
Koefisien hambatan viscous (CV) terdiri dari komponen form factor (k) dan
koefisien hambatan gesek (CF). Pada program hullspeed maxsurf menggunakan metode
slender body diman metode ini dapat diaplikasikan untuk menghitung hambatan lambung
kapal yang pipih/tipis (rasio panjang dan lebar yang besar) kemudian nilai form factor (k)
pada lambung katamaran simetris dihitung berdasarkan dari hasil eksperimen oleh Molland
(1996) dimana formulasinya dapat dilihat pada persamaan 6.1:
(1+βk) = 3.03 (L/ 1/3) -0.04 (6.1)
Persamaan (6.1) diperoleh nilai form factor untuk lambung katamaran simetris (1+βk)
sebesar 1.38. Sedangkan untuk menghitung koefisien hambatan gesek (Cf) menggunakan
formula yang direkomendasikan ITTC’57.
(6.2)
(6.3)
Dimana Re = Reynold Number
V = Kecepatan Kapal (m/s)
L = Panjang Kapal (m)
V = Kinematika Viskos
Grafik 6.9 diperlihatkan bahwa besarnya koefisien hambatan viskos (CV) tidak
dipengaruhi oleh perubahan jarak pemisah lambung demihull (S/L) karena form factor
konstan terhadap rasio S/L sedangkan hasil eksperimen oleh Molland (1991) menunjukkan
hambatan viskos bergantung perubahan jarak antara demihull (S/L). walaupun memiliki
perbedaan nilai yang kecil, karena terjadi fenomena interaksi antara lambung demihull.

62
Gambar 6.9 Koefisien Hambatan Viskos (Cv) Lambung Katamaran Simetris dengan
Variasi S/L
Penentuan besarnya hambatan kapal dapat dilakukan melalui beberapa cara yaitu
perhitungan secara analitik (teoritik), pengujian model pada tangki percobaan (eksperimen)
dan menggunakan simulasi model kapal dikomputer (simulasi numerik). Pengujian melalui
tangki percobaan perlu dilakukan untuk tahap perkiraan besarnya daya mesin kapal yang
dibutuhkan. Hasil yang akurat dapat diperoleh dari haril pengujian tangki tetapi besarnya
biaya perlu dikeluarkan untuk melakukan pengujian model pada tangki percobaan.
Pengujian menggunakan simulasi model kapal dikomputer dapat menekan besarnya biaya
yang dibutuhkan dari pengujian tangki.
Proses verifikasi perlu dilakukan untuk pengujian model kapal melalui komputer.
Verifikasi merupakan terminologi untuk menunjukkan tingkat kebenaran dari simulasi
yang dilakukan. Untuk menentukan tingkat kevalidan, dapat dilakukan dengan beberpat
metode yaitu memastikan semua boundary condition dan inisialisasi telah sesuai dengan
teori dan kasus yang ditinjau serta dengan cara membandingkan dengan sebuah
acuan/standart yang telah ada dengan referensi yang jelas. Verifikasi pengujian komputer
dilakukan dengan membandingkan hasil pengujian simulasi model kapal dikomputer
dengan pengujian model kapal pada kolam pengujian.

63
Tabel 6.3 Data ukuran model tangki percobaan dan CFD
Parameter Demihull Simetris Katamaran Simetris Unit
Lwl 1.405 1.405 m
b 0.066 - m
T 0.126 0.126 m
WSA 0.3563 0.7127 m2
Volume 0.007 0.014 m3
Displasemen 7.0233 14.0439 kg
6.6 Analisa Perbandingan Hambatan Viskos Lambung Katamaran Simetris
menggunakan CFD dan Eksperimen
Pengujian melalui tangki percobaan pada katamaran Simetris dilakukan di kolam
pengujian Laboratorium Hidrodinamika Indonesia (LHI) oleh Jammaluddin, Utama dan
Molland (2010). Kolam pengujian di LHI mempunyai dimensi panjang 240 m, lebar 11 m
dan kedalaman 5,5 m. Ukuran model kapal pada tangki percobaan disajikan pada tabel 6.2.
Ukuran model kapal untuk simulasi model kapal dikomputer dibuat sama dengan model
kapal untuk tangki percobaan.
Gambar 6.10 Perbandingan CFD dan Eksperimen Hambatan Viskos
antara Demihull Simetris .
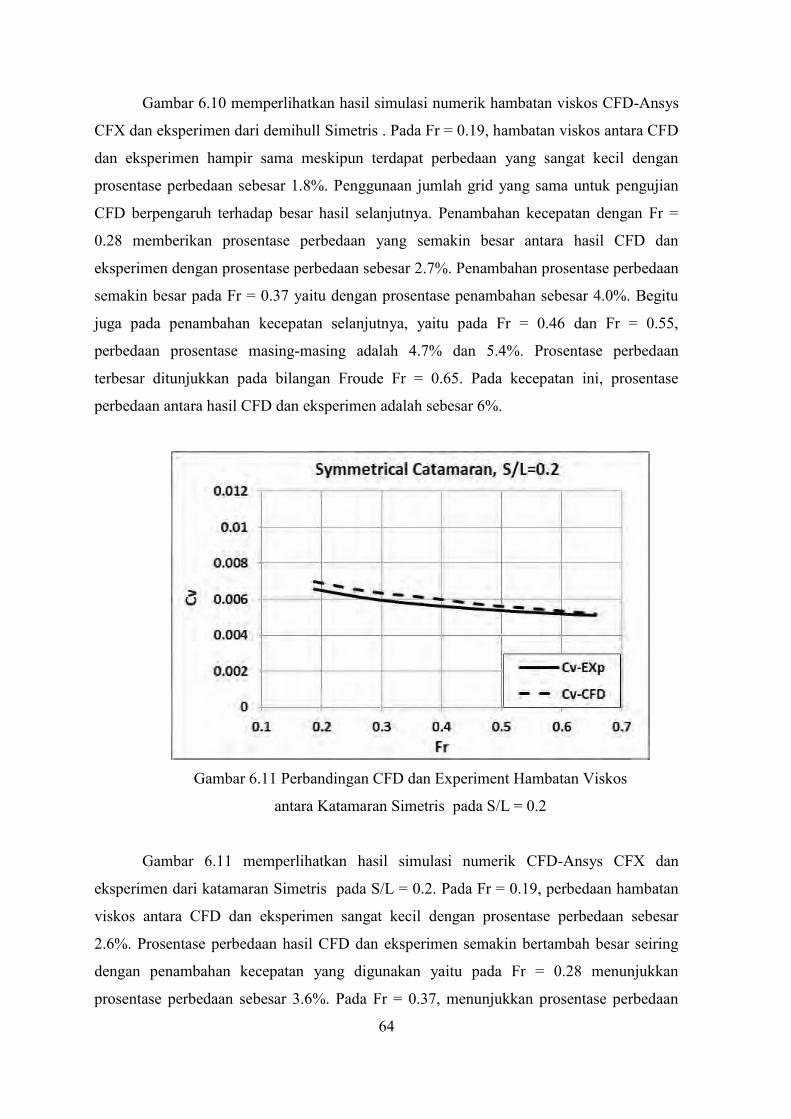
64
Gambar 6.10 memperlihatkan hasil simulasi numerik hambatan viskos CFD-Ansys
CFX dan eksperimen dari demihull Simetris . Pada Fr = 0.19, hambatan viskos antara CFD
dan eksperimen hampir sama meskipun terdapat perbedaan yang sangat kecil dengan
prosentase perbedaan sebesar 1.8%. Penggunaan jumlah grid yang sama untuk pengujian
CFD berpengaruh terhadap besar hasil selanjutnya. Penambahan kecepatan dengan Fr =
0.28 memberikan prosentase perbedaan yang semakin besar antara hasil CFD dan
eksperimen dengan prosentase perbedaan sebesar 2.7%. Penambahan prosentase perbedaan
semakin besar pada Fr = 0.37 yaitu dengan prosentase penambahan sebesar 4.0%. Begitu
juga pada penambahan kecepatan selanjutnya, yaitu pada Fr = 0.46 dan Fr = 0.55,
perbedaan prosentase masing-masing adalah 4.7% dan 5.4%. Prosentase perbedaan
terbesar ditunjukkan pada bilangan Froude Fr = 0.65. Pada kecepatan ini, prosentase
perbedaan antara hasil CFD dan eksperimen adalah sebesar 6%.
Gambar 6.11 Perbandingan CFD dan Experiment Hambatan Viskos
antara Katamaran Simetris pada S/L = 0.2
Gambar 6.11 memperlihatkan hasil simulasi numerik CFD-Ansys CFX dan
eksperimen dari katamaran Simetris pada S/L = 0.2. Pada Fr = 0.19, perbedaan hambatan
viskos antara CFD dan eksperimen sangat kecil dengan prosentase perbedaan sebesar
2.6%. Prosentase perbedaan hasil CFD dan eksperimen semakin bertambah besar seiring
dengan penambahan kecepatan yang digunakan yaitu pada Fr = 0.28 menunjukkan
prosentase perbedaan sebesar 3.6%. Pada Fr = 0.37, menunjukkan prosentase perbedaan

65
yang semakin besar yaitu sebesar 4.2%. Prosentase perbedaan hasil CFD dan eksperimen
semakin besar pada Fr = 0.46 dan Fr = 0.55 dengan prosentase perbedaan masing-masing
adalah 4.8% dan 5.4%. Pada Fr = 0.65, prosentase perbedaan terbesar terjadi antara hasil
CFD dan eksperimen dengan prosentase perbedaan diatara keduanya adalah sebesar 6.0%.
Gambar 6.12 Perbandingan CFD dan Experiment Hambatan Viskos
antara Katamaran Simetris pada S/L = 0.3
Gambar 6.12 memperlihatkan hasil simulasi numerik CFD-Ansys CFX dan
eksperimen katamaran Simetris pada S/L = 0.3. Prosentase perbedaan terkecil antara hasil
CFD dan eksperimen terjadi pada Fr = 0.19 dengan prosentase perbedaan sebesar 2.4%.
Prosentase perbedaan semakin bertambah besar pada Fr = 0.28 dengan penambahan
prosentase perbedaan sebesar 2.9% dari kecepatan sebelumnya. Penambahan prosentase
perbedaan sebesar 4.2% dari prosentase pada Fr = 0.28 terjadi pada Fr = 0.37 sehingga
membuat hasil CFD semakin bertambah besar dibandingkan dengan hasil eksperimen.
Pada bilangan Froude Fr = 0.46, prosentase perbedaan hasil CFD dan eksperimen
katamaran Simetris semakin besar dengan prosentase perbedaan diantara keduanya
sebesar 4.7%. Begitu juga pada bilangan Froude Fr = 0.55 dan Fr = 0.65, prosentase
perbedaan antara hasil CFD dan eksperimen semakin bertambah besar dari variasi
kecepatan sebelumnya dengan perbedaan prosentase masing-masing sebesar 5.5% dan
6.0%.

66
Gambar 6.13 Perbandingan CFD dan Experiment Hambatan Viskos
antara Katamaran Simetris pada S/L = 0.4
Gambar 6.13 memperlihatkan hasil simulasi numerik CFD-Ansys CFX dan
eksperimen katamaran Simetris pada S/L = 0.4. Prosentase perbedaan terkecil sebesar
2.1% antara hasil CFD dan eksperimen hambatan katamaran Simetris terjadi pada Fr =
0.19. Pada Fr = 0.28, prosentase perbedaan sebesar 2.7% terjadi antara asil CFD dan
eksperimen katamaran Simetris . Prosentase perbedaan sebesar 4.2% terjadi pada bilangan
Froude 0.37 dari perbandingn hasil CFD dan eksperimen. Pada bilangan Froude 0.46,
prosentase perbedaan semakin bertambah menjadi 4.6% dari perbandingan hasil CFD dan
eksperimen katamaran Simetris . Begitu juga pada Fr = 0.55 dan 0.65, prosentase
perbedaan hasil CFD dan eksperimen katamaran Simetris semakin bertambah dengan
penambahan masing-masing sebesar 5.4% dan 6.0%.

67
Interferensi viskos adalah terjadinya peningkatan viskositas fluida diantara dua
lambung demihull karena adanya perubahan tekanan dan penambahan kecepatan aliran
akibat pengaruh dua lambung demihull yang berdekatan.
6.7 Analisa Hambatan Gelombang Lambung Katamaran Simetris
Koefisien hambatan gelombang (Cw) semakin besar dengan bertambahnya jarak
pemisah lambung demihull (S/L) pada Fr 0.45-0.85 sebagaimana diperlihatkan pada
gambar 6.14. Hal ini penting untuk dikaji karena pada umumnya kapal katamaran
beroperasi pada kecepatan Fr 0.4-0.7 (Sahoo, 2006).
Gambar 6.14 Koefisien Hambatan Gelombang (Cw) Lambung Katamaran Simetris Dengan
Variasi S/L

68
Tabel 6.4 Koefisien hambatan total (CFD)
Tabel 6.5 Koefisien hambatan vikos (CFD)
Tabel 6.6 Koefisien hambatan gelombang (CFD)

69
6.8 Analisa Form factor Demihull dengan Katamaran Simetris
Tabel 6.8 Perbedaan Prosentase Form Factor Demihull dan Katamaran Simetris
(1+k) (1+ k) Prosentase Perbedaan Demihull S/L=0.2 S/L=0.3 S/L=0.4 0,2 0,3 0,4
1.179 1.250 1.240 1.228 6% 5% 4% 1.218 1.292 1.276 1.267 6% 5% 4% 1.248 1.325 1.310 1.301 6% 5% 4% 1.271 1.348 1.330 1.324 6% 4% 4% 1.288 1.365 1.349 1.341 6% 4% 4% 1.302 1.388 1.364 1.357 6% 5% 4%
Hasil pengukuran yang dilakukan dengan menggunakan CFD-Ansys CFX
diperlihatkan pada Tabel 6.8. Besarnya perbedaan form factor yang dihasilkan oleh
masing-masing bentuk lambung memperlihatkan adanya pengaruh interferensi viskos yang
dihasilkan oleh setiap bentuk badan kapal. Hasil ini sesuai dengan pengujian yang
dilakukan oleh Molland (1994, 1996) dimana form factor katamaran akan lebih besar
dibandingkan dengan demihull.
Gambar 6.15 memperlihatkan besarnya form factor yang dihasilkan oleh demihull
(monohull) dan katamaran dalam hal ini katamaran Simetris . Dari grafik diatas terlihat
bahwa besarnya form factor dipengaruhi oleh besarnya kecepatan kapal yang digunakan
dan bentuk kapal yang digunakan. Semakin besar kecepatan yang digunakan maka
semakin besar pula form factor yang dihasilkan.
Gambar 6.15 Perbandingan Form Factor Demihull dan Katamaran
Simetris.

70
Halaman ini sengaja dikosongkan

71
BAB-7
KESIMPULAN
7.1 Umum
Komponen hambatan lambung kapal katamaran memiliki fenomena yang lebih
kompleks dibanding dengan monohull, sebab adanya pengaruh interferensi dan interaksi
diantara dua lambung katamaran. Interferensi hambatan tersebut terdiri atas dua klasifikasi
yaitu interferensi hambatan viskos dan interferensi hambatan gelombang. Interferensi
hambatan viskos diakibatkan oleh terjadinya perubahan tekanan di sekitar kedua lambung
(demihull). Sedangkan interferensi hambatan gelombang disebabkan oleh terjadinya
perubahan pola gelombang di antara lambung katamaran akibat pertemuan dua moda
gelombang dari depan hingga kebelakang lambung.
Dari analisa yang telah dilakukan hasil simulasi CFD-Ansys CFX dan eksperiment
(towing tank) menunjukkan perbedaan nilai komponen hambatan yang relatif kecil, rata-
rata 3%. Kajian yang telah dilakukan terhadap komponen hambatan karena pengaruh jarak
demihull dapat disimpulkan sebagai berikut:
a. Koefisien hambatan total (CT) untuk lambung simetris lebih besar, khususnya pada
bilangan Froude 0.4 – 0.6. Hasil eksperimen memperlihatkan bahwa semakin kecil
jarak antara lambung katamaran (S/L) maka semakin besar hambatan yang terjadi.
Fenomena ini timbul karena adanya efek interaksi viskos dan gelombang diantara
kedua lambung tersebut. Namun dengan jarak dan kecepatan tertentu, efek interaksi
gelombang dapat negatif (menguntungkan) dimana hambatan gelombang yang
ditimbulkan menjadi lebih kecil.
b. Form factor (1+βk) untuk lambung katamaran lebih besar 7% - 10% dari pada form
factor (1+k) untuk demihull (monohull). Hal tersebut mengindikasikan adanya
pengaruh interaksi dan interferensi viskos terhadap jarak antara lambung (S/L).
Semakin besar rasio S/L, maka semakin kecil interferensi viskos β
c. Faktor interferensi hambatan gelombang bervariasi terhadap S/L, dimana nilai τ
semakin kecil dengan membesarnya perubahan jarak antara lambung (S/L). Hal
tersebut diakibatkan oleh ketinggian elevasi gelombang yang semakin kecil pada
area antara lambung dengan semakin besarnya jarak antara lambung.
72
d. Interferensi total hambatan memberikan kontribusi positif, dimana total hambatan
lambung katamaran relatif kecil, pada rasio S/L Fr > 0.5
e. Kajian kapal katamaran menunjukkan Interferensi Hambatan memberikan hasil
yang positif dimana pada variasi jarak S/L = 0.4 dan memberikan hasil hambatan
lebih kecil dengan Fr> 0.56
7.2 Saran
Hasil penelitian ini diharapkan dapat memperkaya dan memperkuat data base untuk
tujuan ilmiah dalam mempresentasikan pengaruh interferensi komponen hambatan viskos
dan gelombang pada lambung (demihull) kapal katamaran dan selanjutnya dapat
diaplikasikan dalam perhitungan hambatan yang digunakan untuk penentuan tenaga mesin
kapal katamaran pada proses desain kapal.
Untuk penelitian selanjutnya dapat dilakukan analisa stabilitas dari katamaran
simetris untuk mengetahui kemampuan stabiltas kapal sehingga dapat mendukung
penggunaan bentuk badan kapal ini.

73
DAFTAR PUSTAKA
Anderson Jr., J.D., (1995), Computational Fluid Dynamics: The Basic with Application,
McGraw-Hill, Singapore.
Amstrong, T., The Effect of Demihull Separation On The Frictional Resistance Of
Catamarans, FAST, 2003
Bardina, J.E., Huang, P.G., and Coakley, T.J., Turbulence Modelling, Validation, Testing
and Development, NASA Technical Memorandum 110446, 1997.
Bertram, V. (2000), Practical Ship Hydrodynamics, Butterworth-Heinemann, Linacre
House, Jordan Hill, Oxford OX2 8DP, UK., pp. 74.
CFX, CFX Manual VII, Ansys 2007
Deng, R., Huang, D., Cheng, J.Li.X., and Yu, L., Discussion of grid generation for
catamaran resistance calculation, Journal of marine Sci. Appl. (2010) 9: 187-191.
Dinham, T.A., Craddock, C., Lebas, A., and Ganguly, A., Use of CFD for hull form and
appendage design assessment on a offshore patrol vessel and identification of a wake
focusing effect, RINA Marine CFD Conference, Southampton, UK., 2008.
Dubrovsky V, Lyakhovitsky A, 2001, Multi-Hull Ships, Backbone Publishing Company,
New York. USA.
Menter,F.R., Zonal Two Equation k- Turbulence Model for Flows, AIAA Paper 93-
2906,1993
Menter,F.R., Two-Equation Eddy-Viscousity Turbulence Model for Engineering
Applications, AIAA Journal, Vol.32 (1994) 289-289.
74
Hughes, G., 1954, "Friction and form resistance in turbulent flow, and a proposed
formulation for use in model and ship correlation". Transactions, Royal Institution of
Naval Architects.
Insel, M., and Molland, A.F., 1990, "An Investigation into the Resistance Components of
High-speed Displacement Catamarans". PhD thesis, University of Southampton.
Jamaluddin, A., Utama, I.K.A.P. and Molland, A.F., Experimental Investigation Into the
Drag Characteristics of Symmetrical and Asymmetrical Staggered and Unstaggered
Catamaran, International Conference on Ship & Offshore Technology (ICSOT)-
Indonesia 2010, Surabaya, 11- 12 Novenber 2010.
Lewis, Edward V. 1980. Principles of Naval Architecture Second Revision, Volume II,
Resistance, Propulsion and Vibration. Jersey City, NJ : The Society of Naval
Architects & Marine Engineers.
Lord Kelvin (Sir William Thomson) (1887b). “On Ship Waves”. Proc. Inst. Of Mechanical
Engineering.
Moraes, H.B., Vasconcellos, J.M., and Latorre, R.G., March 2004. Wave resistance for
high-speed catamarans, Computer Networks and ISDN Systems 26, 6-8:711-719.
Niekerk,J, Comparison of Catamaran Hull Type, Issue of Power Multihulls Magazine,
2000
Tarafder, Md Shahjada., Suzuki, Kazuo., 2006, “Computation of wave-making resistance
of a catamaran in deep water using a potential-based panel method” Faculty of
Engineering, Yokohama National University, Japan.
Thompson, J.F., Soni, B.K., and Weatherill, N.P., Handbook of Grid Generation, CRC
Press., 1999.

75
Utama, I.K.A.P., Jamaluddin,A., Widodo, B., dan Aryawan, WD., The use of free surface
CFD modeling technique to predict catamaran resistance components, Development
in Marine CFD, IIT Madras, Chennai, India, 18-19 November, 2011
Utama, I.K.A.P. 1999, An Investigation of the Viscous Resistance Components of
Catamaran Forms, PhD Thesis, Faculty of Engineering and Applied Science,
University of Southampton, UK.
Utama, I.K.A.P dan Hantoro R. 2010. “Computational Fluid Dynamic (CFD) dengan
ANSYS CFX”, ITS Surabaya.
Versteeg H.K., and Malalasekera W., (1995), An Introduction to Computational Fluid
Dynamics, Longman Scientific & Technical, England.
Yaakob,Omar., Ghani, Mohd. Pauzi Abd., Mukti, Mohd. Afifi Abd., Nasirudin, Ahmad.,
Tawi, Kamarul Baharin., Lazim, Tholudin Mat., “The Wake Wash Prediction on an
symmetric Catamaran Hull Form”. Faculty of Mechanical Engineering. UTM.
Zaraphonitis, G., Spanos, D., and Papanikolau, A., “Numerical and Experiment Study on
Wave Resistanceof Fast Displacement symmetric Catamarans”. Ship Desain
Laboratory, National Technical University of Athens, 2011

76
Halaman ini sengaja dikosongkan

LAMPIRAN - I
DISAIN MODEL DAN KONFIGURASI LAMBUNG KATAMARAN
(ANSYS- CFX)
I.1 Komputasi Hambatan Viskos
I.1.1 Komputasi Hambatan Viskos pada Symmetrical Demihull Demihull, Fr=0.19 Vm=0.68 m/s
Demihull, Fr=0.28, Vs= 1.03 m/s
77

Demihull, Fr=0.37 Vm=1.37 m/s
Demihull, Fr=0.47 V=1.7 m/s
Demihull, Fr=0.56 Vm=2.0 m/s
78

Demihull, Fr=0.65 Vm=2.4m/s
79
I.1.2 Komputasi Hambatan Viskos pada Symmetrical Catamaran, S/L=0.2
Catamaran S/L=0.2, Fr=0.19 Vm=0.68 m/s
Catamaran S/L=0.2, Fr=0.28, Vm= 1.03 m/s
Catamaran S/L=0.2, Fr=0.37 Vm=1.37 m/s
80

Catamaran S/L=0.2, Fr=0.47 Vm=1.7 m/s
Catamaran S/L=0.2, Fr=0.56 Vm=2.0 m/s
Catamaran S/L=0.2, Fr=0.65 Vm=2.4m/s
81
I.1.3 Komputasi Hambatan Viskos pada Symmetrical Catamaran, S/L=0.3
Catamaran S/L=0.3, Fr=0.19 Vm=0.68 m/s
Catamaran S/L=0.3, Fr=0.28, Vm= 1.03 m/s
Catamaran S/L=0.3, Fr=0.37 Vm=1.37 m/s
82

Catamaran S/L=0.3, Fr=0.47 Vm=1.7 m/s
Catamaran S/L=0.3, Fr=0.56 Vm=2.0 m/s
Catamaran S/L=0.3, Fr=0.65 Vm=2.4m/s
83

I.1.4 Komputasi Hambatan Viskos pada Symmetrical Catamaran, S/L=0.4
Catamaran S/L=0.4, Fr=0.19 Vm=0.68 m/s
Catamaran S/L=0.4, Fr=0.28, Vm= 1.03 m/s
Catamaran S/L=0.4, Fr=0.37 Vm=1.37 m/s
84
Catamaran S/L=0.4, Fr=0.47 Vm=1.7 m/s
Catamaran S/L=0.4, Fr=0.56 Vm=2.0 m/s
Catamaran S/L=0.4, Fr=0.65 Vm=2.4m/s
85

I.2 Komputasi Hambatan Gelombang
I.2.1 Komputasi Hambatan Gelombang pada Symmetrical Demihull
Demihull, Fr=0.19 Vm=0.68 m/s
Demihull, Fr=0.28, Vm= 1.03 m/s
Demihull, Fr=0.37 Vm=1.37 m/s
86

Demihull, Fr=0.47 Vm=1.7 m/s
Demihull, Fr=0.56 Vm=2.0 m/s
Demihull, Fr=0.65 Vm=2.4m/s
87
I.2.2 Komputasi Hambatan Gelombang pada Symmetrical Catamaran, S/L=0.2
Catamaran S/L=0.2, Fr=0.19 Vm=0.68 m/s
Catamaran S/L=0.2, Fr=0.28, Vm= 1.03 m/s
Catamaran S/L=0.2, Fr=0.37 Vm=1.37 m/s
88

Catamaran S/L=0.2, Fr=0.47 Vm=1.7 m/s
Catamaran S/L=0.2, Fr=0.56 Vm=2.0 m/s
Catamaran S/L=0.2, Fr=0.65 Vm=2.4m/s
89

I.2.3 Komputasi Hambatan Gelombang pada Symmetrical Catamaran, S/L=0.3
Catamaran S/L=0.3, Fr=0.19 Vm=0.68 m/s
Catamaran S/L=0.3, Fr=0.28, Vm= 1.03 m/s
Catamaran S/L=0.3, Fr=0.37 Vm=1.37 m/s
90

Catamaran S/L=0.3, Fr=0.47 Vm=1.7 m/s
Catamaran S/L=0.3, Fr=0.56 Vm=2.0 m/s
Catamaran S/L=0.3, Fr=0.65 Vm=2.4m/s
91
I.2.4 Komputasi Hambatan Gelombang pada Symmetrical Catamaran, S/L=0.4
Catamaran S/L=0.4, Fr=0.19 Vm=0.68 m/s
Catamaran S/L=0.4, Fr=0.28, Vm= 1.03 m/s
Catamaran S/L=0.4, Fr=0.37 Vm=1.37 m/s
92
Catamaran S/L=0.4, Fr=0.47 Vm=1.7 m/s
Catamaran S/L=0.4, Fr=0.56 Vm=2.0 m/s
Catamaran S/L=0.4, Fr=0.65 Vm=2.4m/s
93

94

LAMPIRAN- II
DATA HASIL SIMULASI CFD-Ansys CFX
II.1. DATA RESISTANCE
Demihull
Fr
V (m/s)
Re
RT
(N) RV
(N) CT
CV
CW
0.19 0.688 1.12E+06 0.49271 0.39521 0.007100 0.006281 0.000819 0.28 1.030 1.68E+06 1.23461 0.81822 0.007634 0.005786 0.001848 0.37 1.373 2.24E+06 2.56803 1.36115 0.008897 0.005381 0.003516 0.46 1.717 2.79E+06 4.62330 2.03338 0.011618 0.005172 0.006446 0.56 2.059 3.35E+06 6.37632 2.75692 0.011397 0.004956 0.006441 0.65 2.402 3.91E+06 7.47854 3.83889 0.009795 0.004817 0.004978
Catamaran S/L= 0.2
Fr
V (m/s)
Re
RT
(N) RV
(N) CT
CV
CW
0.19 0.688 1.12E+06 0.926195 0.81698 0.007511 0.006975 0.0005360.28 1.030 1.68E+06 2.545228 1.69172 0.009180 0.006412 0.0027680.37 1.373 2.24E+06 4.914455 3.01724 0.009980 0.006085 0.0038950.46 1.717 2.79E+06 9.325152 4.22220 0.012134 0.005694 0.0064400.56 2.059 3.35E+06 12.25401 5.68861 0.011096 0.005451 0.0056450.65 2.402 3.91E+06 13.29465 7.72130 0.008786 0.005173 0.003613
95

Catamaran S/L= 0.3
Fr
V (m/s)
Re
RT
(N) RV
(N) CT
CV
CW
0.19 0.688 1.12E+06 0.861544 0.82245 0.006983 0.006706 0.000277 0.28 1.030 1.68E+06 2.347364 1.76715 0.008472 0.006228 0.002244 0.37 1.373 2.24E+06 4.313903 3.04721 0.008762 0.005819 0.002943 0.46 1.717 2.79E+06 9.345039 4.26588 0.012149 0.005546 0.006603 0.56 2.059 3.35E+06 11.34023 5.75121 0.010267 0.005297 0.004970 0.65 2.402 3.91E+06 12.57604 7.65730 0.008375 0.005099 0.003276
Catamaran S/L= 0.4
Fr
V (m/s)
Re
RT
(N) RV
(N) CT
CV
CW
0.19 0.688 1.12E+06 0.849396 0.79751 0.006890 0.006509 0.000381 0.28 1.030 1.68E+06 2.137206 1.68026 0.007713 0.006014 0.001699 0.37 1.373 2.24E+06 4.417395 2.92114 0.008978 0.005629 0.003349 0.46 1.717 2.79E+06 8.807121 4.11338 0.011463 0.005405 0.006058 0.56 2.059 3.35E+06 10.92435 5.54144 0.009882 0.005284 0.004598 0.65 2.402 3.91E+06 12.49241 7.71013 0.008282 0.005113 0.003170
96

II.2. DATA FLOW VELOCITY DAN PRESSURE
Fr= 0.65
X- Position Sym.Cat., S/L= 0.2 Sym.Cat., S/L= 0.3 Sym.Cat., S/L= 0.4
Inner Outter Inner Outter Inner Outter
Velocity
1 2.35706 2.38402 2.36949 2.38816 2.38998 2.39946
2 2.42326 2.42301 2.41503 2.41412 2.41502 2.41248
3 2.46716 2.44614 2.44662 2.43072 2.43440 2.42259
4 2.45211 2.43720 2.43784 2.42563 2.43186 2.42133
5 2.45683 2.43610 2.43378 2.42107 2.41901 2.41331
Pressure
1 2896.91 2898.77 2892.32 2893.84 2887.73 2888.90
2 2893.39 2899.99 2890.14 2894.35 2886.88 2888.71
3 2899.95 2902.26 2894.87 2896.09 2889.78 2889.92
4 2900.81 2900.29 2896.05 2895.30 2891.28 2890.30
5 2901.77 2900.07 2897.09 2894.99 2892.40 2889.91
Fr= 0.56
X- Position Sym.Cat., S/L= 0.2 Sym.Cat., S/L= 0.3 Sym.Cat., S/L= 0.4
Inner Outter Inner Outter Inner Outter
Velocity
1 2.01362 2.03668 2.02637 2.04234 2.04601 2.05413
2 2.07020 2.07001 2.06531 2.06454 2.06744 2.06528
3 2.10773 2.08978 2.09234 2.07874 2.08406 2.07394
4 2.09489 2.08214 2.08407 2.07440 2.08116 2.07288
5 2.09894 2.08116 2.07341 2.06219 2.05493 2.04940
Pressure
1 2114.33 2115.69 2115.35 2116.46 2116.37 2117.22
2 2111.76 2116.59 2113.75 2116.84 2115.74 2117.08
3 2116.58 2118.25 2117.23 2118.11 2117.87 2117.97
4 2117.13 2116.74 2118.06 2117.50 2118.98 2118.25
5 2117.65 2116.49 2118.73 2117.23 2119.81 2117.97
97

Fr= 0.47
X- Position Sym.Cat., S/L= 0.2 Sym.Cat., S/L= 0.3 Sym.Cat., S/L= 0.4
Inner Outter Inner Outter Inner Outter
Velocity
1 1.67971 1.69897 1.68983 1.70317 1.70569 1.71248
2 1.72694 1.72678 1.72233 1.72170 1.72357 1.72178
3 1.75828 1.74330 1.74489 1.73355 1.73744 1.72901
4 1.74759 1.73691 1.73868 1.72993 1.73568 1.72814
5 1.75094 1.73605 1.73580 1.72666 1.72656 1.72244
Pressure
1 1471.34 1472.29 1471.14 1471.91 1470.94 1471.53
2 1469.57 1472.93 1470.04 1472.18 1470.50 1471.43
3 1472.96 1474.09 1472.47 1473.07 1471.97 1472.05
4 1473.28 1472.97 1473.02 1472.61 1472.76 1472.25
5 1473.44 1472.69 1473.39 1472.38 1473.34 1472.06
Fr= 0.37
X- Position Sym.Cat., S/L= 0.2 Sym.Cat., S/L= 0.3 Sym.Cat., S/L= 0.4
Inner Outter Inner Outter Inner Outter
Velocity
1 1.34450 1.35994 1.35241 1.36311 1.36492 1.37037
2 1.38234 1.38223 1.37845 1.37796 1.37925 1.37782
3 1.40746 1.39547 1.39654 1.38746 1.39036 1.38362
4 1.39892 1.39035 1.39159 1.38456 1.38899 1.38293
5 1.40159 1.38961 1.38929 1.38193 1.38172 1.37839
Pressure
1 942.774 943.379 942.36 942.86 941.953 942.334
2 941.640 943.796 941.66 943.03 941.671 942.271
3 943.844 944.542 943.23 943.61 942.615 942.668
4 944.003 943.773 943.56 943.28 943.124 942.796
5 943.933 943.52 943.72 943.10 943.501 942.677
98

Fr= 0.28
X- Position Sym.Cat., S/L= 0.2 Sym.Cat., S/L= 0.3 Sym.Cat., S/L= 0.4
Inner Outter Inner Outter Inner Outter
Velocity
1 1.00880 1.02041 1.01482 1.02287 1.02429 1.02839
2 1.03723 1.03716 1.03438 1.03402 1.03505 1.03399
3 1.05612 1.04712 1.04798 1.04117 1.04341 1.03835
4 1.04973 1.04326 1.04429 1.03900 1.04241 1.03785
5 1.05171 1.04266 1.04258 1.03700 1.03699 1.03446
Pressure
1 530.826 531.167 530.66 530.94 530.499 530.714
2 530.195 531.409 530.27 531.04 530.339 530.678
3 531.458 531.832 531.16 531.37 530.870 530.902
4 531.504 531.354 531.33 531.16 531.163 530.975
5 531.313 531.145 531.35 531.03 531.379 530.911
Fr= 0.19
X- Position Sym.Cat., S/L= 0.2 Sym.Cat., S/L= 0.3 Sym.Cat., S/L= 0.4
Inner Outter Inner Outter Inner Outter
Velocity
1 0.67270 0.68047 0.67679 0.68218 0.683185 0.685933
2 0.69169 0.69167 0.68986 0.68964 0.690374 0.689675
3 0.704324 0.698326 0.69896 0.69442 0.695969 0.692597
4 0.70009 0.695744 0.69653 0.69297 0.695347 0.692279
5 0.70143 0.69528 0.69542 0.69162 0.691778 0.690033
Pressure
1 236.087 236.24 236.06 236.18 236.025 236.120
2 235.812 236.352 235.88 236.23 235.953 236.104
3 236.381 236.537 236.28 236.37 236.188 236.204
4 236.373 236.295 236.35 236.27 236.323 236.238
5 236.197 236.161 236.31 236.19 236.422 236.210
99

Di sebuah desa yang sangat asri dan sejuk, saat itu hari Jum’at, 12 Aparil 1985, saya dilahirkan. Orang tua saya memberikan nama Sutiyo kepada saya dan berharap untuk menjadi manusia yang baik dan senantiasa menyenangkan orang tua.
Saya mulai sekolah formal di TK Al Hikmah di desa tempat tinggal saya, yaitu desa Ngampungan tahun 1989. Di sekolah tersebut saya termasuk anak yang pandai karena merasakan juara 1 pada TK dan juara 2 di TK B. Kemudian saya melanjutkan ke SD Negeri 1 Ngampungan yang merupakan salah satu sekolah dasar favorit ditingkat kecamatan.
Pada tahun 1991, saya melanjutkan ke SLTPN 1 Bareng. SLTPN merupakan singkatan dari Sekolah Lanjutan Tingkat Pertama
Negeri yang merupakan nama lain dari SMP. Alhamdulillah, lulus dengan peringkat terbaik se-Kecamatan Bareng.
Harapan melanjutkan ke jenjang SMA meredup karena kondi keluarga yang tidak mendukung. Akhirnya dengan tekad yang masih tersisa dan ekonomi yang seadanya, saya melajutkan ke sekolah vokasional (keahlian) dengan mengambil juruasan keahlian asisten perawat pada tahun 1997 dan lulus pada tahun 1998.
Karena takdir Allah, pada tahun 2003, saya memiliki niat untuk melanjutkan ke jenjang SMA dan pada tahun itu pula saya di terima MA Al-Bairuny setalah 2 tahun sebelumnya saya tidak sekolah. Di MA Al Bairuny merupakan sekolah yang membangkit niatku untuk terus sekolah. Sungguh, perjuangan yang tidak mudah, disamping sekolah, saya harus membiaya sekolah dan biaya hidup sendiri sebagai seorang asisten perawat di Rumah Sakit Islam Jombang. Dengan motivasi dari para Bapak dan Ibu guru dan alumni di sekolah, muncul keinginan untuk kuliah.
Jurusan Teknik Perkapalan, Institut Tekonolgi Sepuluh Nopember, Surabya pada tahun 2006 resmi menjadi sekolah formal saya di jenjang Perguruan Tinggi dan menjadi kebanggaan tersendiri karena bisa memasuki salah satu Perguruan Tinggii favorit di Indonesia.
Lingkungan, Pendindik dan Teman yang baru membuka cakrawala wawasan yang lebih luas. Kemudian dengan masuk sebagai anggota Himpunan Jurusan Teknik Perkapalan menuntut saya untuk capak berorganisasi. Jabatan fungsionaris yang pernah diduduki sebagai Kepala Divisi Hubungan Luar Hima Tekpal pada periode 2007-2008 dan Sekretaris Umum Lembaga Kajian Jurusan “As-Safinah” periode 2007-2008.
Sebagai concern (fokus) keahlian di bidang perkapalan, saya mengambil bidang hidrodinamika, yang melipui aspek tahanan dan stabilitas. Ada beberapa software yang saya kuasai dan digunakan untuk melakukan analisa hal-hal tersebut antara lain; Maxsurf Resistance, Maxsurf Motion, Maxsurf Seakeeaping, ANSYS CFX, ANSYS AQWA.
Tugas Akhir (Skripsi) mengambil judul “STUDI PENGARUH INTERFERENSI TERHADAP HAMBATAN PADA KAPAL KATAMARAN SIMETRI MELALUI CFD (COMPUTATIONAL FLUID DYNAMICS)”. Semoga Skripsi yang saya susun memeberikan manfaat kepada para pembaca yang membutuhkan referensi terkait dengan CFD (Computational Fulids Dynamics).
Kontak person : [email protected] / 085745524710
BIODATA