solving a multiobjective possibilistic problem through compromise programming
TRANSCRIPT

European Journal of Operational Research 164 (2005) 748–759
www.elsevier.com/locate/dsw
Decision Aiding
Solving a multiobjective possibilistic problemthrough compromise programming q
M. Arenas Parra, A. Bilbao Terol, B. P�erez Gladish, M.V. Rodr�ıguez Ur�ıa *
Dpto. Economia Cuantitativa, Facultad de Ciencias Econ�omicas y Empresariales, Avda. del Cristo s/n,
University of Oviedo, Oviedo, Spain
Received 30 September 2002; accepted 28 November 2003
Available online 12 March 2004
Abstract
Real decision problems usually consider several objectives that have parameters which are often given by the
decision maker in an imprecise way. It is possible to handle these kinds of problems through multiple criteria models in
terms of possibility theory.
Here we propose a method for solving these kinds of models through a fuzzy compromise programming approach.
To formulate a fuzzy compromise programming problem from a possibilistic multiobjective linear programming
problem the fuzzy ideal solution concept is introduced. This concept is based on soft preference and indifference
relationships and on canonical representation of fuzzy numbers by means of their a-cuts. The accuracy between the
ideal solution and the objective values is evaluated handling the fuzzy parameters through their expected intervals and a
definition of discrepancy between intervals is introduced in our analysis.
� 2004 Elsevier B.V. All rights reserved.
Keywords: Multiple criteria decision making; Multiobjective programming; Compromise programming; Fuzzy number; Possibility
distribution; Expected interval
1. Introduction
In many complex decision situations data available may not be sufficient to define the parameters of a
real problem in an exact or objective form. It is possible to handle imprecision through the possibility
theory.
Possibility theory was proposed by Zadeh (1978) and developed by Dubois and Prade (1988); in it, fuzzy
parameters are associated with possibility distributions in the same way that random variables are
qThis work was supported by the Spanish Department of Science and Technology (project BFM2000-0010). This support is
gratefully acknowledged.* Corresponding author. Tel.: +34-8-510-2802; fax: +34-8-510-2806.
E-mail addresses: [email protected] (M. Arenas Parra), [email protected] (A. Bilbao Terol), [email protected] (B. P�erezGladish), [email protected] (M.V. Rodr�ıguez Ur�ıa).
0377-2217/$ - see front matter � 2004 Elsevier B.V. All rights reserved.
doi:10.1016/j.ejor.2003.11.028
M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759 749
associated with probability distributions. Possibility distributions are represented as normal convex fuzzysets, such as L–R fuzzy numbers. Since the 1980s, the possibility theory has become more and more
important in the decision field and several methods have been developed to solve possibilistic programming
problems (see Buckley, 1988, 1989; Lai and Hwang, 1992; Julien, 1994; Arenas et al., 1998a,b, 1999a,b,
2001; Jim�enez et al., 2000; Saati et al., 2001).
We shall consider here a multiobjective possibilistic linear programming problem (FP-MOLP) in which
all the parameters are fuzzy. We suppose that they are represented by fuzzy numbers described by their
possibility distribution estimated by the analyst from the information supplied by the Decision Maker
(Tanaka, 1987).The uncertain and/or imprecise nature of the problem’s parameters involves two main problems: fea-
sibility and optimality. Feasibility may be handled by comparing fuzzy numbers. In this paper we use a
fuzzy relationship to compare fuzzy numbers (Jim�enez, 1996) that verifies suitable properties and that,
besides, is computationally efficient to solve linear problems because it preserves its linearity. Since this
fuzzy preference relation does not admit degrees of indifference, we have defined––in Section 2––the
concept of b-indifference.Optimality is handled through Compromise Programming (CP). CP is a well-known Multiple Criteria
Decision Making approach developed by Yu (1985) and Zeleny (1973). The basic idea in CP is the iden-tification of an ideal solution as a point where each attribute under consideration achieves its optimum
value. Zeleny states that alternatives that are closer to the ideal are preferred to those that are farther from
it because being as close as possible to the perceived ideal is the rationale of human choice.
As a natural extension of the concept of an ideal solution for a crisp multiobjective linear program-
ming problem, we are going to introduce the concept of fuzzy ideal solution. The accuracy between the
fuzzy ideal solution and the objective values is evaluated handling fuzzy parameters through their ex-
pected intervals and using some of the interval results developed in this work. In Section 3 we define the
discrepancy set and the discrepancy between intervals and also between fuzzy numbers. From these wewill transform the initial multiobjective possibilistic linear programming problem (FP-MOLP) into a
family of crisp problems.
2. Feasibility in the multiobjective possibilistic linear programming problem
We shall consider the following multiobjective possibilistic programming problem:
min ~z ¼ ð~z1;~z2; . . . ;~zkÞ ¼ ð~c1x;~c2x; . . . ;~ckxÞ
s:t: x 2 vð~A; ~bÞ ¼~aix6 ~bi; i ¼ 1; . . . ; l;
~aix ¼ ~bi; i ¼ lþ 1; . . . ;m;
xP 0;
8><>: ðFP-MOLPÞ
where xt ¼ ðx1; x2; . . . ; xnÞ is the crisp decision vector, ~ct ¼ ð~c1;~c2; . . . ;~ckÞ is composed of fuzzy vectors
which are the fuzzy coefficients of the k considered objectives, ~A ¼ ½~aij�m�n is the fuzzy technological
matrix and ~bt ¼ ð~b1; ~b2; . . . ; ~bmÞ are fuzzy parameters. We suppose that all fuzzy parameters of the
problem are given by fuzzy numbers (see Dubois and Prade, 1978, 2000) described, as we have said, by
their possibility distributions estimated by the analyst from the information supplied by the DecisionMaker.
The uncertain and/or imprecise nature of the technological matrix and of the resource vector which
defines the set of constraints of the model leads us to compare fuzzy numbers, so that the concept of b-feasibility of a decision vector has to be introduced.

750 M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759
In this work we handle fuzzy numbers through their expected intervals. In particular, we are workingwith triangular fuzzy numbers. Heilpern (1992) defined the expected interval of a fuzzy triangular number~a ¼ ðaL; aC; aRÞ, as follows:
EIð~aÞ ¼ ½EIð~aÞL;EIð~aÞR� ¼ aL þ aC
2;aC þ aR
2
� �; ð1Þ
where aL is the left value, aC is the central value and aR is the right value of the fuzzy number.It can be proved that the expected interval of fuzzy numbers is a linear operator (Heilpern, 1992, the-
orem 2).
The expected interval of the fuzzy vector ~ai ¼ ð~ai1; ~ai2; . . . ; ~ainÞ is a vector whose components are the
expected intervals of each fuzzy number of vector ~ai, that is
EIð~aiÞ ¼ ðEIð~ai1Þ;EIð~ai2Þ; . . . ;EIð~ainÞÞ:
In order to compare fuzzy numbers represented by their expected intervals we use the following pref-erence relationship:
Definition 1 (Jim�enez, 1996). For any pair of fuzzy numbers ~a and ~b the relationship of fuzzy preference
between them is defined as follows:
lMð~a; ~bÞ ¼
0 if EIð~aÞL > EIð~bÞR;EIð~bÞR � EIð~aÞL
EIð~aÞR � EIð~aÞL þ EIð~bÞR � EIð~bÞLif 0 2 ½EIð~bÞL � EIð~aÞR;EIð~bÞR � EIð~aÞL�;
1 if EIð~aÞR < EIð~bÞL;
8>>><>>>: ð2Þ
where lMð~a; ~bÞ is the degree of preference of ~a over ~b.
If lMð~a; ~bÞP b, with b 2 ½0; 1�, we say that ‘‘~a is smaller than ~b at least in a degree b’’ and it is denoted by~a6 b
~b. From Definition 1 this is equivalent to
ð1� bÞEIð~aÞL þ bEIð~aÞR 6 bEIð~bÞL þ ð1� bÞEIð~bÞR: ð3Þ
Proposition 1 (Monotony of the relationship 6 b). If 06b1 < b2 6 1 then
~a6 b2~b ) ~a6 b1
~b: ð4Þ
Definition 1 implies that if lMð~a; ~bÞ ¼ 12then the following relationships simultaneously hold: ~a6 1
2
~b and~b6 1
2~a. In this case, Jim�enez (1996) considers the fuzzy numbers ~a and ~b to be indifferent.
The previous concept implies ~a and ~b to be indifferent in an ungraduated sense, which does not allow us
to handle indifference in a flexible way. To establish flexible indifference, we define b-indifference between ~aand ~b, whose semantic would be: ‘‘lMð~a; ~bÞ is approximately 1
2’’.
Definition 2. For any pair of fuzzy numbers ~a and ~b we say that ~a is indifferent to ~b in a degree b, 06 b6 1,
denoted by ~a �b~b, if the following relationships hold simultaneously: ~a6 b
2
~b and ~b6 b2~a, i.e., ~a is indifferent
to ~b in a degree b if b26 lMð~a; ~bÞ6 1� b
2.
If b ¼ 1 then ~a and ~b are indifferent in Jim�enez’s sense.Observe that if ~a and ~b are b-indifferent then
b6 2minðlMð~a; ~bÞ; lMð~b; ~aÞÞ: ð5Þ

M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759 751
This b-indifference relationship verifies the following monotonicity property:
Proposition 2 (Monotony of the relationship �b). If 06 b1 < b2 6 1 then
~a �b2~b ) ~a �b1
~b: ð6Þ
Considering now the initial problem (FP-MOLP), let us introduce the following definition:
Definition 3. A decision vector x 2 IRn, is said to be b-feasible for the problem FP-MOLP if x verifies the
constraints at least in a degree b. That is
~aix6 b~bi; i ¼ 1; . . . ; l;
~aix �b~bi; i ¼ lþ 1; . . . ;m:
ð7Þ
The set of all b-feasible decision vectors is denoted by vðbÞ. From Propositions 1 and 2 the following
property immediately follows:
b1 < b2 ) vðb1Þ � vðb2Þ: ð8Þ
Observe that if the feasibility degree of each constraint is b, then 1� b is the maximum degree ofconstraints unfeasibility.
According to the above considerations we shall solve the FP-MOLP through a family of problems b-FP-MOLP, 06 b6 1:
min ~z ¼ ð~z1;~z2; . . . ;~zkÞ ¼ ð~c1x;~c2x; . . . ;~ckxÞ
s:t: x 2 vðbÞ ¼x 2 IRn=~aix6 b
~bi; i ¼ 1; . . . ; l;
~aix �b~bi; i ¼ lþ 1; . . . ;m;
xP 0:
8><>: ðb-FP-MOLPÞ
Taking into account (3) this problem is equivalent to
min ~z ¼ ð~z1;~z2; . . . ;~zkÞ ¼ ð~c1x;~c2x; . . . ;~ckxÞ
s:t:
ð1� bÞEIð~aiÞL þ bEIð~aiÞRh i
x6 bEIð~biÞL þ ð1� bÞEIð~biÞR; i ¼ 1; . . . ; l;
1� b2
� �EIð~aiÞL þ b
2EIð~aiÞR
h ix6 b
2EIð~biÞL þ 1� b
2
� �EIð~biÞR; i ¼ lþ 1; . . . ;m;
b2EIð~aiÞL þ 1� b
2
� �EIð~aiÞR
h ixP 1� b
2
� �EIð~biÞL þ b
2EIð~biÞR; i ¼ lþ 1; . . . ;m;
xP 0:
9>>>>>>=>>>>>>;¼ vðbÞ:
The optimality of the initial problem is evaluated using CP and handling the fuzzy objectives, ~zr ¼ ~crx,through their expected intervals. In the next section we are going to introduce the concept of b-fuzzy ideal
solution and the discrepancy between fuzzy numbers. From these we will transform the initial FP-MOLP
into a crisp one.
3. Optimality in the multiobjective possibilistic linear programming problem
In order to apply the CP approach to solve the problem, we need to obtain the fuzzy ideal solution of b-FP-MOLP problem. For this, it is necessary to solve the following mono-objective fuzzy linear pro-
gramming problems:

752 M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759
min ~zr ¼ ~crx
s:t: x 2 vðbÞ;ðb-FLPÞ
where r ¼ 1; . . . ; k.To solve each (b-FLP) problem we use the solving method proposed by Arenas et al. (1998a). This
method gives fuzzy solutions in the objectives space defined by their possibility distribution. The method isbased on the extension principle and the joint possibility distribution of the fuzzy parameters. It relies on
the a-cuts of the solution to generate its possibility distribution (for more details about the construction of
this solution; see Arenas et al., 1998a, 1999a). Arenas et al. (1998a, theorem 5) have proved that solution
~z�r ðbÞ to problem (b-FLP) is a fuzzy number. Thus, the b-fuzzy ideal solution in the objectives space, to the
FP-MOLP problem can be defined:
Definition 4. A b-fuzzy ideal solution in the objectives space, of the FP-MOLP, ~z�ðbÞ ¼ ð~z�1ðbÞ;~z�2ðbÞ; . . . ;~z�kðbÞÞ is a vector whose components are the fuzzy numbers obtained solving k b-FLP problems.
Once the fuzzy ideal solution is obtained for the FP-MOLP problem, we have to find the values of the
decision variables, x, which determine a fuzzy solution, ~z ¼ ~cx, as accurately as possible to the fuzzy ideal
solution, ~z�ðbÞ.We will handle the fuzzy objectives and the b-fuzzy ideal solution through their expected intervals.
Therefore, the problem now is
Find a x 2 vðbÞ such that : EIð~crxÞ ~!EIð~z�r ðbÞÞ; r ¼ 1; . . . ; k: ð9Þ
In order to work with the expected intervals we are going to introduce some definitions and resultsrelated to the closed intervals of the real straight line.
Definition 5. Let A ¼ ½aL; aR� and B ¼ ½bL; bR� be two intervals on the real line. We define the discrepancy
set between A and B, denoted by DSðA;BÞ, as the following set of non-negative real numbers:
DSðA;BÞ ¼ fjaL � bLj; jaR � bRjg: ð10Þ
Definition 6. We define discrepancy between A and B, denoted by DðA;BÞ, the maximum element of the
discrepancy set DSðA;BÞ:
DðA;BÞ ¼ maxDSðA;BÞ ¼ maxfjaL � bLj; jaR � bRjg: ð11ÞObserve that DðA;BÞ ¼ 0 () A ¼ B.
From this, equality between intervals can be studied through their discrepancy. Then we can say that ‘‘an
interval A is as close as possible to an interval B’’ when discrepancy between them is as close as possible tozero. We shall denote the relation of ‘‘accurate’’ as ðf!Þ:
A ~!B () DðA;BÞ ~!0: ð12Þ
If A has at least the same spread as B, we say that B is less imprecise than A.Proposition 3. Given two intervals A and B, such that B is less imprecise than A, the discrepancy set is obtainedas
(a) If aL P bL then
DSðA;BÞ ¼ faL � bL; aR � bRg: ð13Þ

M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759 753
(b) If aL 6 bL and aR P bR then
DSðA;BÞ ¼ fbL � aL; aR � bRg: ð14Þ(c) If aR 6 bR then
DSðA;BÞ ¼ fbL � aL; bR � aRg: ð15Þ
Then we obtain the following result:
Proposition 4. Given two intervals A and B, if B is less imprecise than A, the discrepancy between both intervalsis obtained as
DðA;BÞ ¼ maxfbL � aL; aR � bRg: ð16Þ
Previous concepts will be extended to fuzzy numbers:
Definition 7. Discrepancy set between two fuzzy numbers ~a and ~b as the discrepancy set between their ex-
pected intervals.
Definition 8. Discrepancy between the fuzzy numbers ~a and ~b as the discrepancy between their expected
intervals.
Considering now the b-FP-MOLP we should consider that it is desirable to obtain fuzzy objective vectorwhich are less imprecise than the b-fuzzy ideal solution.
If we call Dr the discrepancy between the fuzzy numbers ~z�r ðbÞ and ~crx we have that
EIð~crxÞ ~!EIð~z�r ðbÞÞ; r ¼ 1; . . . ; k if and only if Dr ! 0: ð17Þ
This allows us to state that a decision vector reaches the expected interval of the fuzzy ideal solution if, andonly if, the discrepancy between the fuzzy numbers ~z�r ðbÞ and ~crx is equal to zero for r ¼ 1; . . . ; k.According to the above considerations, we shall solve a new crisp CP problem where the objective is to
minimize the discrepancy between the b-fuzzy ideal solution and fuzzy objectives. Therefore, the ideal
solution is the null vector and we shall define a b-compromise solution as
Definition 9. A decision vector x� is a b-compromise solution of the FP-MOLP if it is a compromise
solution to the problem
min ðD1;D2; . . . ;DkÞs:t: x 2 vðbÞ:
ð18Þ
As problem (18) is crisp, the compromise programming approach to solve it is based on the Lp family of
distances:
Problem Lp:
min Lp ¼ minXkr¼1
wprD
pr
!1p
s:t: x 2 vðbÞ;
ð19Þ
where wr P 0 can be regarded as a normalizing coefficient and also as a weight that measures the relative
importance of the discrepancy between the rth fuzzy objective and its fuzzy ideal value and may be
established in accordance with the Decision Maker.

754 M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759
For p ¼ 1 metric, the best compromise or solution closest to the ideal solution can be obtained bysolving the following linear programming problem:
Problem L1:
min L1 ¼ minXkr¼1
wrDr
s:t: x 2 vðbÞ:ð20Þ
For p ¼ 1, the maximum divergence between individual discrepancies is minimised. Consequently, the
best-compromise solution is obtained by solving the following problem:
Problem L1:
min L1 ¼ min maxrwrDr
s:t: x 2 vðbÞ:ð21Þ
The problem (21) is a min–max problem that is reformulated as
min DT
s:t: x 2 vðbÞ;DT PwrDr; r ¼ 1; . . . ; k;
ð22Þ
where DT ¼ maxwrDr, r ¼ 1; . . . ; n.Solutions to problems (20) and (21) are the most commonly obtained compromise solutions, because for
metrics other than p ¼ 1 and p ¼ 1 non-linear mathematical programming algorithms are needed. Also,
under certain conditions (see Blasco et al., 1999; Ballestero and Romero, 1998) they are the bounds of the
whole compromise set. If these conditions do not exist, one possible approach is to approximate the real
efficient frontier by a smooth curve.
4. Numerical example
We shall consider the following multiobjective linear program with fuzzy parameters:
max ð40; 50; 80Þx1 þ 100x2 þ 17:5x3max ð80; 92; 120Þx1 þ ð50; 75; 110Þx2 þ 50x3max ð10; 25; 70Þx1 þ 100x2 þ 75x3s:t: ð6; 12; 14Þx1 þ 17x2 6 1400;
3x1 þ 9x2 þ ð3; 8; 10Þx3 6 1000;
10x1 þ ð7; 13; 15Þx2 þ 15x3 6 1750;
ð4; 6; 8Þx1 þ 16x3 6 1325;
ð7; 12; 19Þx2 þ 7x3 6 900;
9:5x1 þ ð3:5; 9:5; 11:5Þx2 þ 4x3 ¼ ð1060; 1075; 1080Þ;
ð23Þ
where fuzzy coefficients are characterized by triangular fuzzy numbers.We shall solve problem (23) setting w1 ¼ w2 ¼ w3 ¼ 1. As a first step we ask the DM to fix the feasibility
degree he/she wants to assume. Once the DM has fixed the initial feasibility degree, the b-fuzzy ideal
solution is obtained through its a-cuts.
M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759 755
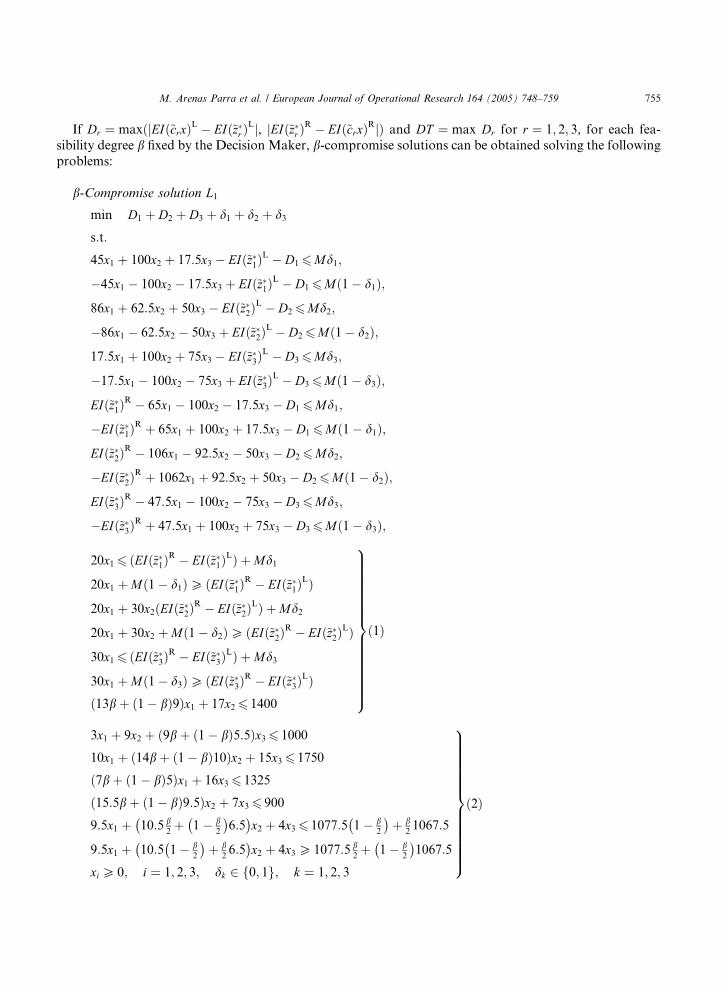
If Dr ¼ maxðjEIð~crxÞL � EIð~z�r ÞLj, jEIð~z�r Þ
R � EIð~crxÞRjÞ and DT ¼ max Dr for r ¼ 1; 2; 3, for each fea-sibility degree b fixed by the Decision Maker, b-compromise solutions can be obtained solving the following
problems:
b-Compromise solution L1
min D1 þ D2 þ D3 þ d1 þ d2 þ d3
s:t:
45x1 þ 100x2 þ 17:5x3 � EIð~z�1ÞL � D1 6Md1;
�45x1 � 100x2 � 17:5x3 þ EIð~z�1ÞL � D1 6Mð1� d1Þ;
86x1 þ 62:5x2 þ 50x3 � EIð~z�2ÞL � D2 6Md2;
�86x1 � 62:5x2 � 50x3 þ EIð~z�2ÞL � D2 6Mð1� d2Þ;
17:5x1 þ 100x2 þ 75x3 � EIð~z�3ÞL � D3 6Md3;
�17:5x1 � 100x2 � 75x3 þ EIð~z�3ÞL � D3 6Mð1� d3Þ;
EIð~z�1ÞR � 65x1 � 100x2 � 17:5x3 � D1 6Md1;
�EIð~z�1ÞR þ 65x1 þ 100x2 þ 17:5x3 � D1 6Mð1� d1Þ;
EIð~z�2ÞR � 106x1 � 92:5x2 � 50x3 � D2 6Md2;
�EIð~z�2ÞR þ 1062x1 þ 92:5x2 þ 50x3 � D2 6Mð1� d2Þ;
EIð~z�3ÞR � 47:5x1 � 100x2 � 75x3 � D3 6Md3;
�EIð~z�3ÞR þ 47:5x1 þ 100x2 þ 75x3 � D3 6Mð1� d3Þ;
20x1 6 ðEIð~z�1ÞR � EIð~z�1Þ
LÞ þMd1
20x1 þMð1� d1ÞP ðEIð~z�1ÞR � EIð~z�1Þ
LÞ
20x1 þ 30x2ðEIð~z�2ÞR � EIð~z�2Þ
LÞ þMd2
20x1 þ 30x2 þMð1� d2ÞP ðEIð~z�2ÞR � EIð~z�2Þ
LÞ
30x1 6 ðEIð~z�3ÞR � EIð~z�3Þ
LÞ þMd3
30x1 þMð1� d3ÞP ðEIð~z�3ÞR � EIð~z�3Þ
LÞð13bþ ð1� bÞ9Þx1 þ 17x2 6 1400
9>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>;
ð1Þ
3x1 þ 9x2 þ ð9bþ ð1� bÞ5:5Þx3 6 1000
10x1 þ ð14bþ ð1� bÞ10Þx2 þ 15x3 6 1750
ð7bþ ð1� bÞ5Þx1 þ 16x3 6 1325
ð15:5bþ ð1� bÞ9:5Þx2 þ 7x3 6 900
9:5x1 þ 10:5 b2þ 1� b
2
� �6:5
� �x2 þ 4x3 6 1077:5 1� b
2
� �þ b
21067:5
9:5x1 þ 10:5 1� b2
� �þ b
26:5
� �x2 þ 4x3 P 1077:5 b
2þ 1� b
2
� �1067:5
xi P 0; i ¼ 1; 2; 3; dk 2 f0; 1g; k ¼ 1; 2; 3
9>>>>>>>>>>>>>=>>>>>>>>>>>>>;ð2Þ
756 M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759
b-Compromise solution L1
Table
Possib
a
0
0.2
0.4
0.6
0.8
1
min DT þ d1 þ d2 þ d3s:t:
45x1 þ 100x2 þ 17:5x3 � EIð~z�1ÞL � DT 6Md1;
� 45x1 � 100x2 � 17:5x3 þ EIð~z�1ÞL � DT 6Mð1� d1Þ;
86x1 þ 62:5x2 þ 50x3 � EIð~z�2ÞL � DT 6Md2;
� 86x1 � 62:5x2 � 50x3 þ EIð~z�2ÞL � DT 6Mð1� d2Þ;
17:5x1 þ 100x2 þ 75x3 � EIð~z�3ÞL � DT 6Md3;
� 17:5x1 � 100x2 � 75x3 þ EIð~z�3ÞL � DT 6Mð1� d3Þ;
EIð~z�1ÞR � 65x1 � 100x2 � 17:5x3 � DT 6Md1;
� EIð~z�1ÞR þ 65x1 þ 100x2 þ 17:5x3 � DT 6Mð1� d1Þ;
EIð~z�2ÞR � 106x1 � 92:5x2 � 50x3 � DT 6Md2;
� EIð~z�2ÞR þ 1062x1 þ 92:5x2 þ 50x3 � DT 6Mð1� d2Þ;
EIð~z�3ÞR � 47:5x1 � 100x2 � 75x3 � DT 6Md3;
� EIð~z�3ÞR þ 47:5x1 þ 100x2 þ 75x3 � DT 6Mð1� d3Þ
and subject to the group of constraints (1) and (2).
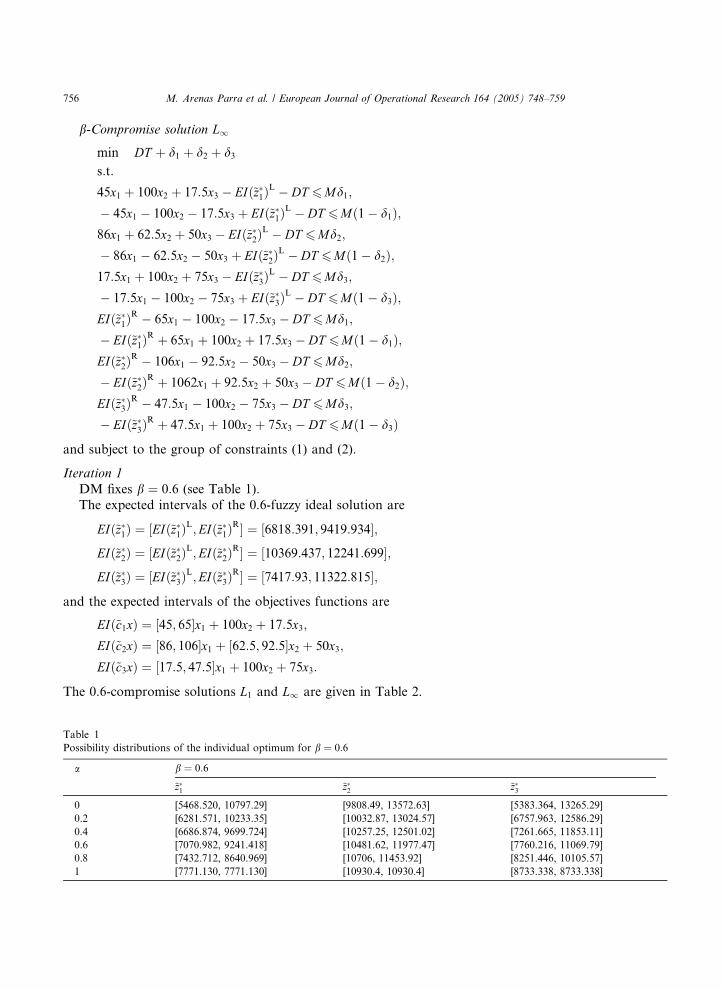
Iteration 1
DM fixes b ¼ 0:6 (see Table 1).
The expected intervals of the 0.6-fuzzy ideal solution are
EIð~z�1Þ ¼ ½EIð~z�1ÞL;EIð~z�1Þ
R� ¼ ½6818:391; 9419:934�;
EIð~z�2Þ ¼ ½EIð~z�2ÞL;EIð~z�2Þ
R� ¼ ½10369:437; 12241:699�;
EIð~z�3Þ ¼ ½EIð~z�3ÞL;EIð~z�3Þ
R� ¼ ½7417:93; 11322:815�;
and the expected intervals of the objectives functions are
EIð~c1xÞ ¼ ½45; 65�x1 þ 100x2 þ 17:5x3;
EIð~c2xÞ ¼ ½86; 106�x1 þ ½62:5; 92:5�x2 þ 50x3;
EIð~c3xÞ ¼ ½17:5; 47:5�x1 þ 100x2 þ 75x3:
The 0.6-compromise solutions L1 and L1 are given in Table 2.
1
ility distributions of the individual optimum for b ¼ 0:6
b ¼ 0:6
~z�1 ~z�2 ~z�3
[5468.520, 10797.29] [9808.49, 13572.63] [5383.364, 13265.29]
[6281.571, 10233.35] [10032.87, 13024.57] [6757.963, 12586.29]
[6686.874, 9699.724] [10257.25, 12501.02] [7261.665, 11853.11]
[7070.982, 9241.418] [10481.62, 11977.47] [7760.216, 11069.79]
[7432.712, 8640.969] [10706, 11453.92] [8251.446, 10105.57]
[7771.130, 7771.130] [10930.4, 10930.4] [8733.338, 8733.338]
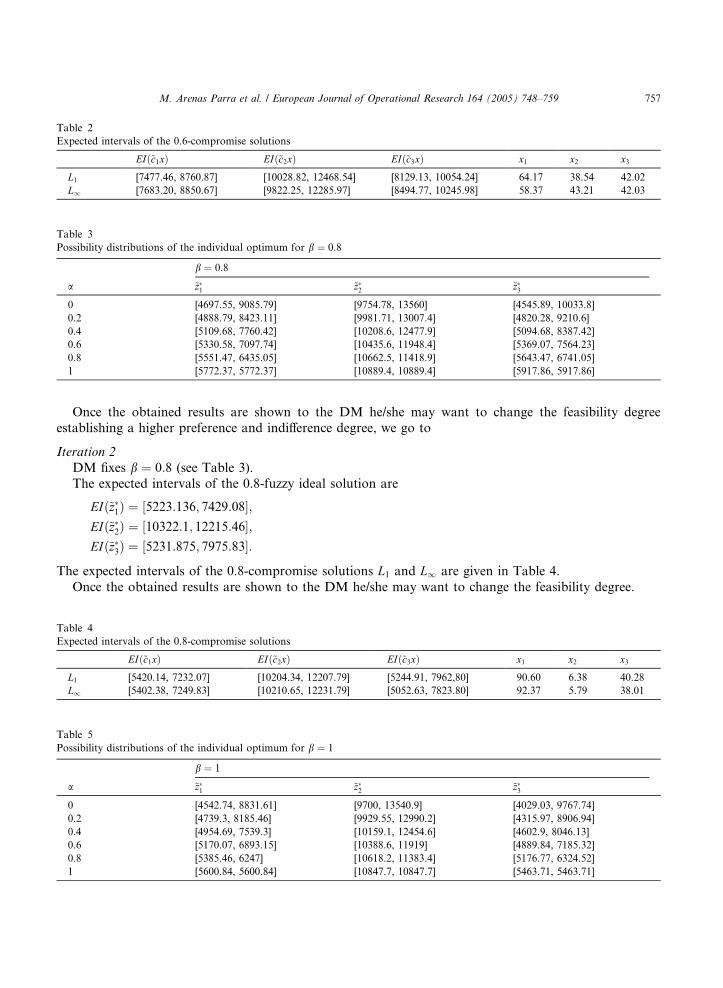
Table 2
Expected intervals of the 0.6-compromise solutions
EIð~c1xÞ EIð~c2xÞ EIð~c3xÞ x1 x2 x3
L1 [7477.46, 8760.87] [10028.82, 12468.54] [8129.13, 10054.24] 64.17 38.54 42.02
L1 [7683.20, 8850.67] [9822.25, 12285.97] [8494.77, 10245.98] 58.37 43.21 42.03
Table 3
Possibility distributions of the individual optimum for b ¼ 0:8
b ¼ 0:8
a ~z�1 ~z�2 ~z�3
0 [4697.55, 9085.79] [9754.78, 13560] [4545.89, 10033.8]
0.2 [4888.79, 8423.11] [9981.71, 13007.4] [4820.28, 9210.6]
0.4 [5109.68, 7760.42] [10208.6, 12477.9] [5094.68, 8387.42]
0.6 [5330.58, 7097.74] [10435.6, 11948.4] [5369.07, 7564.23]
0.8 [5551.47, 6435.05] [10662.5, 11418.9] [5643.47, 6741.05]
1 [5772.37, 5772.37] [10889.4, 10889.4] [5917.86, 5917.86]
M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759 757
Once the obtained results are shown to the DM he/she may want to change the feasibility degreeestablishing a higher preference and indifference degree, we go to
Iteration 2
DM fixes b ¼ 0:8 (see Table 3).The expected intervals of the 0.8-fuzzy ideal solution are
Table
Expect
L1
L1
Table
Possib
a
0
0.2
0.4
0.6
0.8
1
EIð~z�1Þ ¼ ½5223:136; 7429:08�;EIð~z�2Þ ¼ ½10322:1; 12215:46�;EIð~z�3Þ ¼ ½5231:875; 7975:83�:
The expected intervals of the 0.8-compromise solutions L1 and L1 are given in Table 4.
Once the obtained results are shown to the DM he/she may want to change the feasibility degree.
4
ed intervals of the 0.8-compromise solutions
EIð~c1xÞ EIð~c2xÞ EIð~c3xÞ x1 x2 x3
[5420.14, 7232.07] [10204.34, 12207.79] [5244.91, 7962,80] 90.60 6.38 40.28
[5402.38, 7249.83] [10210.65, 12231.79] [5052.63, 7823.80] 92.37 5.79 38.01
5
ility distributions of the individual optimum for b ¼ 1
b ¼ 1
~z�1 ~z�2 ~z�3
[4542.74, 8831.61] [9700, 13540.9] [4029.03, 9767.74]
[4739.3, 8185.46] [9929.55, 12990.2] [4315.97, 8906.94]
[4954.69, 7539.3] [10159.1, 12454.6] [4602.9, 8046.13]
[5170.07, 6893.15] [10388.6, 11919] [4889.84, 7185.32]
[5385.46, 6247] [10618.2, 11383.4] [5176.77, 6324.52]
[5600.84, 5600.84] [10847.7, 10847.7] [5463.71, 5463.71]
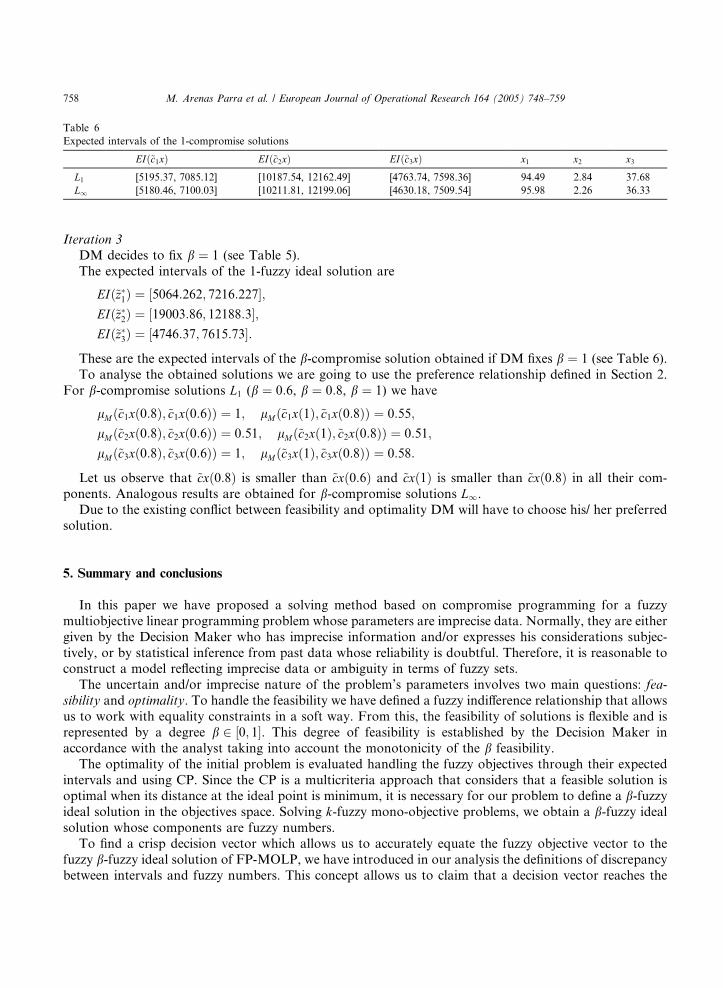
Table 6
Expected intervals of the 1-compromise solutions
EIð~c1xÞ EIð~c2xÞ EIð~c3xÞ x1 x2 x3
L1 [5195.37, 7085.12] [10187.54, 12162.49] [4763.74, 7598.36] 94.49 2.84 37.68
L1 [5180.46, 7100.03] [10211.81, 12199.06] [4630.18, 7509.54] 95.98 2.26 36.33
758 M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759
Iteration 3
DM decides to fix b ¼ 1 (see Table 5).
The expected intervals of the 1-fuzzy ideal solution are
EIð~z�1Þ ¼ ½5064:262; 7216:227�;EIð~z�2Þ ¼ ½19003:86; 12188:3�;EIð~z�3Þ ¼ ½4746:37; 7615:73�:
These are the expected intervals of the b-compromise solution obtained if DM fixes b ¼ 1 (see Table 6).
To analyse the obtained solutions we are going to use the preference relationship defined in Section 2.
For b-compromise solutions L1 (b ¼ 0:6, b ¼ 0:8, b ¼ 1) we have
lMð~c1xð0:8Þ;~c1xð0:6ÞÞ ¼ 1; lMð~c1xð1Þ;~c1xð0:8ÞÞ ¼ 0:55;
lMð~c2xð0:8Þ;~c2xð0:6ÞÞ ¼ 0:51; lMð~c2xð1Þ;~c2xð0:8ÞÞ ¼ 0:51;
lMð~c3xð0:8Þ;~c3xð0:6ÞÞ ¼ 1; lMð~c3xð1Þ;~c3xð0:8ÞÞ ¼ 0:58:
Let us observe that ~cxð0:8Þ is smaller than ~cxð0:6Þ and ~cxð1Þ is smaller than ~cxð0:8Þ in all their com-
ponents. Analogous results are obtained for b-compromise solutions L1.
Due to the existing conflict between feasibility and optimality DM will have to choose his/ her preferred
solution.
5. Summary and conclusions
In this paper we have proposed a solving method based on compromise programming for a fuzzy
multiobjective linear programming problem whose parameters are imprecise data. Normally, they are either
given by the Decision Maker who has imprecise information and/or expresses his considerations subjec-
tively, or by statistical inference from past data whose reliability is doubtful. Therefore, it is reasonable toconstruct a model reflecting imprecise data or ambiguity in terms of fuzzy sets.
The uncertain and/or imprecise nature of the problem’s parameters involves two main questions: fea-sibility and optimality. To handle the feasibility we have defined a fuzzy indifference relationship that allows
us to work with equality constraints in a soft way. From this, the feasibility of solutions is flexible and is
represented by a degree b 2 ½0; 1�. This degree of feasibility is established by the Decision Maker in
accordance with the analyst taking into account the monotonicity of the b feasibility.
The optimality of the initial problem is evaluated handling the fuzzy objectives through their expected
intervals and using CP. Since the CP is a multicriteria approach that considers that a feasible solution isoptimal when its distance at the ideal point is minimum, it is necessary for our problem to define a b-fuzzyideal solution in the objectives space. Solving k-fuzzy mono-objective problems, we obtain a b-fuzzy ideal
solution whose components are fuzzy numbers.
To find a crisp decision vector which allows us to accurately equate the fuzzy objective vector to the
fuzzy b-fuzzy ideal solution of FP-MOLP, we have introduced in our analysis the definitions of discrepancy
between intervals and fuzzy numbers. This concept allows us to claim that a decision vector reaches the
M. Arenas Parra et al. / European Journal of Operational Research 164 (2005) 748–759 759
expected interval of the fuzzy ideal solution if the discrepancy between the b-fuzzy ideal solution and thefuzzy objectives is equal to zero. Then we have solved a crisp CP problem.
The described solving method includes Decision Maker preferences about discrepancy weights, as well as
the degree of feasibility of the decision variables that he/she is willing to accept in each case.
Acknowledgements
We are grateful to the referees for their useful comments and suggestions.
References
Arenas, M., Bilbao, A., Jim�enez, M., Rodr�ıguez, M.V., 1998a. A theory of possibilistic approach to the solution of a fuzzy linear
programming. In: Giron, J. (Ed.), Applied Decision Analysis. Kluwer Academic Publishers.
Arenas, M., Bilbao, A., Jim�enez, M., Rodr�ıguez, M.V., 1998b. M�etodo Interactivo de Resoluci�on de un Programa Multiobjetivo
Linear Posibil�ıstico. Monogr�afico: Problemas complejos de decisi�on. Rev. R. Acad. Cien. Exact. Fis. Nat. (Esp), vol. 92, no. 4, pp.
423–428.
Arenas, M., Bilbao, A., Rodr�ıguez, M.V., 1999a. Solving the multiobjective possibilistic linear programming problem. European
Journal of Operational Research 117, 175–182.
Arenas, M., Bilbao, A., Rodr�ıguez, M.V., 1999b. Solution of a possibilistic multiobjective linear programming problem. European
Journal of Operational Research 119, 338–344.
Arenas, M., Bilbao, A., Rodr�ıguez, M.V., 2001. A fuzzy goal programming approach to portfolio selection. European Journal of
Operational Research 133, 287–297.
Ballestero, E., Romero, C., 1998. Multiple Criteria Decision Making and Its Applications to Economic Problems. Kluwer Academic
Publishers, Boston.
Blasco, E., Cuchillo-Ib�a~nez, E., Mor�on, M.A., Romero, C., 1999. On the monotonicity of the compromise set in multicriteria
problems. Journal of Optimization Theory and its Applications 102 (1), 69–82.
Buckley, J.J., 1988. Possibilistic linear programming with triangular fuzzy numbers. Fuzzy Sets and Systems 26, 135–138.
Buckley, J.J., 1989. Solving possibilistic linear programming problems. Fuzzy Sets and Systems 31, 329–341.
Dubois, D., Prade, H., 1978. Operations on fuzzy numbers. International Journal of Systems Sciences 9 (6), 613–626.
Dubois, D., Prade, H., 1988. Possibility Theory. Plenum Press, New York.
Dubois, D., Prade, H., 2000. Fundamentals of Fuzzy Sets. In: Handbooks of Fuzzy Sets Series. Kluwer Academic Publishers.
Heilpern, S., 1992. The expected value of a fuzzy number. Fuzzy Sets and Systems 47, 81–86.
Jim�enez, M., 1996. Ranking fuzzy numbers through the comparison of their expected intervals. International Journal of Uncertainty.
Fuzziness and Knowledge-Based Systems 4 (4), 379–388.
Jim�enez, M., Arenas, M., Bilbao, A., Rodr�ıguez, M.V., 2000. Solving a possibilistic linear program through compromise
programming. Mathware & Soft Computing 7 (2–3), 175–184.
Julien, B., 1994. An extension to possibilistic linear programming. Fuzzy Sets and Systems 64, 195–206.
Lai, Y.J., Hwang, C.L., 1992. A new approach to some possibilistic linear programming problem. Fuzzy Sets and Systems 49, 121–133.
Saati, M.S., Memariani, A., Jahanshahloo, G.R., 2001. a-cut Based Possibilistic Programming. In: Proceedings of the First National
Industrial Engineering Conference, Iran, pp. 1–10.
Tanaka, H., 1987. Fuzzy data analysis by possibilistic linear models. Fuzzy Sets and Systems 24, 363–375.
Yu, P.L., 1985. M�ultiple-Criteria Decisi�on Making. Concepts, Techniques and Extensions. Plenum Press, New York.
Zadeh, L.A., 1978. Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets and Systems 1, 3–28.
Zeleny, M., 1973. Compromise programming. In: Cochrane, J.L., Zeleny, M. (Eds.), Multiple Criteria Decision Making. University of
South Carolina, Columbia, SC, pp. 262–301.