gateway selection and routing in wireless mesh networks
TRANSCRIPT

Computer Networks 54 (2010) 319–329
Contents lists available at ScienceDirect
Computer Networks
journal homepage: www.elsevier .com/ locate/comnet
Gateway selection and routing in wireless mesh networks q
Katerina Papadaki a,*, Vasilis Friderikos b
a Department of Management, Operational Research Group, London School of Economics, United Kingdomb Department of Electronic Engineering, King’s College London, United Kingdom
a r t i c l e i n f o
Article history:Available online 20 August 2009
Keywords:Wireless mesh networksMixed integer linear programmingRoutingFacility location
1389-1286/$ - see front matter � 2009 Elsevier B.Vdoi:10.1016/j.comnet.2009.04.017
q A short version of this manuscript appeared pWireless Communications and Networking ConfVegas, Nevada, USA, 31 March – 1 April, 2008, eand Gateway Selection in Wireless Mesh Networks.
* Corresponding author. Tel.: +44 2079556538.E-mail addresses: [email protected] (K.
[email protected] (V. Friderikos).
a b s t r a c t
This paper deals with issues regarding network planning and optimization in multi-hopwireless mesh networks (WMNs). The central focus is on mathematical programming for-mulations for both the uncapacitated and capacitated joint gateway selection and routing(U/C-GSR) problem in WMNs, which are in general NP-complete, when expressed as deci-sion problems. We detail a reformulation using the shortest path cost matrix (SPM) andprove that it gives the optimal solution when applied to the uncapacitated case. We extendthe SPM formulation to the capacitated case and show computationally, by using a lowerbound on the optimal solution, that it performs within a small optimality gap. Evidencefrom numerical investigations shows that, the proposed formulation can dramaticallyimprove the computation time for WMNs with realistic network sizes. Furthermore, aset of extensions to the basic formulation is detailed to allow modeling issues such asmulti-rate transmission, restricting the number of hops in each routing sub-tree anddeclaring unreliable nodes as leaf nodes in the routing tree.
� 2009 Elsevier B.V. All rights reserved.
1. Introduction
Undoubtedly wireless mesh networks (WMNs) have re-cently received significant research attention both fromacademia and industry. In large part this interest stemsfrom the fact that WMNs can fulfill a wide set of differentoperational roles. These roles can range from last milebroadband connectivity for un-tethered Internet access athome and in the office, to backhaul support in 2.5/3Gand emerging cellular networks.
In WMNs, nodes are connected to a pre-defined set ofgateways nodes through wireless multi-hop transmission.The key role of the gateways is to provide wide area con-nectivity for all nodes in the network. One of the mostpromising emerging technologies for deploying WMNs is
. All rights reserved.
reviously at the IEEEerence (WCNC), Lasntitled Joint Routing
Papadaki), vasilis.
the IEEE 802.16 standard, which has been approved andpublished in 2002, but since then several amendmentshave been introduced [1,2]. In parallel to the standardiza-tion activities, a significant number of WMNs are currentlyplanned, are in a pre-deployment (testing) phase or havealready being deployed. Along these lines it is worth men-tioning the efforts in [3–6].
In practice, large scale wireless multi-hop mesh net-works will rarely involve a single gateway (i.e., a root nodethat provides connectivity to the global Internet for allnodes in the mesh network). In that respect, by allowingmultiple gateway nodes to be deployed in the networkand allowing flexibility in their selection, a number of fun-damental intertwined design aspects emerge: (i) the gate-way selection, (ii) the assignments of nodes to gatewaysand (iii) the routing paths through wireless multi-hoptransmission from the selected gateways to the nodes.With respect to the routing, we note that we have placedour emphasis on tree construction rather than generalmulti-path routing because centralized or distributedscheduling in trees is supported within the IEEE 802.16standard. Therefore, efficient spanning tree construction

320 K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329
becomes a key aspect for efficient WMN deployment. Apictorial representation of such a scenario is shown inFig. 1, where two different possible layouts for the sameWMN (in terms of the location of the nodes) are depicted.
Since all traffic (both uplink and downlink) flowsthrough the gateway nodes, the spanning tree is capacitylimited and therefore the number of nodes connected isinevitably limited by the capabilities of the gateway nodes.Assuming a pre-defined cost for placing root nodes there isa trade-off between how many of them will be used andthe satisfiability of Quality of Service (QoS) of all partici-pating nodes in the network. Thus, the problem is to findthe minimum number of root nodes such that each nodein the network can be assigned to a root node while atthe same time the QoS requirement is satisfied (in termsof Kbps for example).
In this paper we focus on the problem where the num-ber of gateways, M, to be deployed is pre-decided (i.e.,there is an available budget which can be translated to anumber of gateways) and the problem is to select M gate-ways from a set of nodes so that some performance metricsare optimized. We consider the case where flows arerooted from the gateway nodes to each node in theWMN (downlink case). The results of this paper can be ex-tended to the case where flows are routed from each nodeto the gateways (uplink case).
The above described gateway selection problem closelyresembles the general Facility Location Problem (FLP) [11–13]. In FLPs a number of service facilities need to be openedto serve a spatiality distributed set of customers with theminimum transportation cost. Further, when the numberof facilities p to be opened is fixed, the problem is calledthe p-median problem. However, in the classical FLPs cus-tomers are directly connected to the facilities as opposedto our problem where nodes are connected to gatewaysthrough other nodes. The FLP has found a significant num-
Fig. 1. Two different layouts of a static WMN (in terms of selected gateways
ber of applications and has occupied a central place in thefields of operational research and discrete mathematics.The two main families of problems within the discretelocation theory are the uncapacitated and capacitated ver-sions of the FLP. In the latter case a restriction is imposedon the number of nodes that can be connected to a gate-way; this constraint expresses the capacity of the gateway.In this paper mathematical programming formulations willbe detailed for both the Uncapacitated-GSR (U-GSR) prob-lem and the Capacitated-GSR (C-GSR) problem.
The rest of the paper is organized as follows: In Section2 we detail closely related previous work and lineup themain contributions of the paper. Section 3 specifies thesystem model that has been adopted, describes the prob-lem and details a mixed integer linear program formula-tion for the uncapacitated routing and gateway selectionproblem. In Section 4 we provide a reformulation of theproblem using the all-pairs shortest path matrix. Multi-rate support and further extensions are described in Sec-tion 5. Numerical investigations are reported in Section 6and the paper concludes in Section 7.
2. Selected previous works and research contribution
Much of recent research in WMNs has focused on ad-vanced routing schemes that can also take interferenceinto account [7,8], scheduling algorithms that maximizetime slot reuse [9] or optimize channel assignment [10].Recently a number of works have touched upon the issueof gateway placement/selection and associated routing inwireless multi-hop mesh networks [14–16]. In [14] amathematical programming formulation is discussed witha bi-objective function of minimizing the number of gate-ways that are deployed while at the same time minimizingthe maximal relay load of the nodes in the network. The
nodes and routing tree) consisting of 20 nodes including 2 gateways.

K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329 321
emphasis then is shifted to approximation algorithms andthe structure of the mathematical program is investigatedno further. The problem of gateway selection and routing isalso considered in [15] with the emphasis placed onapproximations, which in this case are based on the dom-inating set problem. In [16] the authors focus on through-put maximization in WMNs by utilizing differentinterference models. But the problem of gateway selectionis dealt in a brute force manner, i.e., by trying all the com-binations of positions and selecting the one with the high-est throughput.
The contributions detailed in this paper representweighable progress on the following fronts,
(1) A compact reformulation of the U/C-GSR integer lin-ear program using the Shortest Path Matrix.
(2) Proof that the SPM formulation in the uncapacitatedcase leads to optimal solutions.
(3) Numerical evidence that, for large realistic networksof up to 500 nodes, the capacitated SPM formulationcan give solutions with small optimality gaps incompetitive computational times.
(4) Extensions to the mathematical programming for-mulations that take into account the variable capac-ity limits per link, non reliable nodes and limits onthe number of allowable wireless hops.
3. Preliminaries and problem definition
A static multi-hop wireless mesh network is considered,which is represented as a directed graph GðV;LÞ, with V
representing the set of nodes and L#V�V the set oflinks. We denote by R#Vthe set of candidate gatewaynodes and we let M < jRj to be the number of gatewaysthat will be deployed. The aim is to assign each node to asingle gateway and route its demand through nodes thatare also assigned to the same gateway. Hence, the U-GSRproblem is defined as follows: Given a graph GðV;LÞ, alink metric cij for link ði; jÞ 2L, and an integer M, constructM trees each rooted at a gateway that cover all the nodesso that the aggregate routing cost is minimized.
3.1. Integer programming formulation for the U-GSR problem
In this section we formulate the U-GSR problem as amixed integer linear program (MILP). Given the numberof gateways, M, that will be deployed, we aim to constructa directed forest, i.e., M directed trees, where flows are di-rected from the gateways to the nodes, so that the overallrouting cost is minimized. To be able to express the prob-lem in a mathematical programming setting, the followingboolean variables are introduced:
The gateway selection variables, for r 2 R,
xr ¼1 if r is a gateway node0 otherwise
�ð1Þ
The gateway assignment variables, for r 2 R and k 2V,
urk ¼1 if r is the gateway of k
0 otherwise
�ð2Þ
Finally the routing (tree construction) variables, for r 2 R
and ði; jÞ 2L,
yrij ¼ number of paths that go through link ði; jÞemanating from gateway r ð3Þ
The routing variables yrij are nonzero only when node r isselected to act as a gateway. Observe that the routing vari-ables in Eq. (3) express the number of nodes that are con-nected to gateway r and use link ði; jÞ.
Based on the above definitions, the U-GSR problem canbe formulated as a mixed integer linear program in graph Gas follows:
minXr2R
Xði;jÞ2L
cij � yrij
subject toXr2R
xr ¼ M ð4ÞXr2R
urk ¼ 1; for all k 2V ð5ÞXr2R
Xk2V:ðk;iÞ2L
yrki �Xr2R
Xj2V:ði;jÞ2L
yrij ¼ 1;
for all i 2V nR ð6ÞXr2R
Xk2V:ðk;iÞ2L
yrki �Xr2R
Xj2V:ði;jÞ2L
yrij ¼ 1�Xk2V
uik;
for all i 2 R ð7Þurk 6 xr; for all r 2 R; k 2V ð8Þyrij 6 K � uri; for all r 2 R; ði; jÞ 2L ð9Þyrij 6 K � urj; for all r 2 R; ði; jÞ 2L ð10Þurk; xr 2 f0;1g; for all r 2 R; k 2V ð11Þyrij P 0; for all r 2 R; ði; jÞ 2L ð12Þ
where K is a large integer. The objective function expressesthe routing cost in the wireless mesh network. Constraint(4) ensures that exactly M gateways will be deployed.The requirement that each node is assigned to only onegateway is reflected in constraint (5).
Constraints (6) and (7) are the flow conservations con-straints. Constraint (6) ensures that for each non gatewaynode i 2V nR the number of paths arriving at node i isone more than the number of paths leaving from the samenode. The above guarantees that exactly one path termi-nates at node i. Similarly, constraint (7) ensures that if anode i 2 R is not selected to be a gateway then the con-straint becomes equivalent to (6). On the other hand, ifnode i 2 R is selected to be a gateway then
Pk2Vuik � 1
paths emanate from node i. The expressionP
k2Vuik � 1 de-notes the number of nodes that i supports, since uii ¼ 1 ifxi ¼ 1.
The inequalities in constraint (8) ensure that when r isnot a gateway then variables urk are all set to zero. Simi-larly, constraints (9) and (10) ensure that a link ði; jÞ cannotbe on the path from gateway r to nodes i or j, if r is not thegateway assigned to nodes i or j. Using a high value of K,the inequalities (9) and (10) are satisfied when nodes i orj are connected to gateway r.
Note that variables x;u are defined to be binary in con-straint (11), whereas variables y as shown in constrain (12)are not constrained to be integral even though by defini-

322 K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329
tion they denote integer quantities (i.e., number of paths).The integrality of variables y follows from the integrality ofthe u variables and the equality in the flow conservationconstraints.
As Section 6 will show the above mixed integer linearprogramming formulation can solve to optimality wirelessmesh network topologies of up to approximately 20 nodesin reasonable computational time. This is a severe restric-tion for network planning and optimization of WMNs. Inthe next section we detail a reformulation to tackle thisissue.
4. Reformulation of the GSR problem based on theshortest path matrix
In this section we provide a reformulation of the GSRproblem and we treat the uncapacitated and capacitatedcases separately.
4.1. The uncapacitated problem
We detail a compact reformulation of the U-GSR prob-lem for the case where there are no capacity constraintsat the gateways, i.e., the uncapacitated case. The basicdrawback, in terms of computational complexity, of theformulation described in the previous section is that rout-ing and gateway selection is performed jointly. Hence, theadvantage of constructing shortest paths trees using prob-lem specific polynomial time algorithms (such as Dijkstra’salgorithm) cannot be explored.
To this end, in order to speed up the computational timethe gateway selection procedure and routing can bedecomposed. Before we outline the decomposition proce-dure, some definitions are required.
Definition. Sðr; kÞ is the cost of the shortest path fromgateway r to node k.
Definition. pðr; kÞ is the predecessor of node k on theshortest path from gateway r to node k (in that direction).
Theorem 4.1. Let R� be the set of optimal selected gatewaysgiven by the U-GSR problem. Then, the optimal gatewayassignment and routing is given by the shortest path matrixS as follows:
(1) Node k is assigned to gateway GðkÞ, which is defined asfollows, � �
GðkÞ ¼min i : i 2 arg minr2R�Sðr; kÞ ð13Þ
where we assume that the node indices are positiveintegers and thus comparable to each other.
(2) The routing from gateway GðkÞ to node k is given by theshortest path from GðkÞ to k.
First we show the following proposition.
Proposition 4.2. Let R�#R be the set of the optimalselected gateways given by the U-GSR problem. For eachk 2 V, let GðkÞ be given by (13). Then, we also have:
GðpðGðkÞ; kÞÞ ¼ GðkÞ
Proof. Suppose that node pðGðkÞ; kÞ is assigned to a gate-way j 2 R� such as j – GðkÞ. Then, since gateway j has theshortest path to node pðGðkÞ; kÞ we can write,
Sðj;pðGðkÞ; kÞÞ 6SðGðkÞ;pðGðkÞ; kÞÞ ð14Þ
Adding to both sides the cost of link ðpðGðkÞ; kÞ; kÞ, i.e.,cðpðGðkÞ; kÞ; kÞ gives,
Sðj;pðGðkÞ; kÞÞ þ cðpðGðkÞ; kÞ; kÞ 6SðGðkÞ; pðGðkÞ; kÞÞþ cðpðGðkÞ; kÞ; kÞ ð15Þ
If Eq. (14) is a strict inequality, then (15) is also a strictinequality, which contradicts the assumption that gatewayGðkÞ has the shortest path to node k.
If Eq. (14) holds with equality, then (15) also holds withequality, which implies that j 2 arg minr2R�Sðr; kÞ. Fromthe definition of GðkÞ, we must have j > GðkÞ (as indices)for all j–GðkÞ. Since, GðpðGðkÞ; kÞÞ picks the closest gatewaythat has the lowest index, it will always pick GðkÞ. ThusGðpðGðkÞ; kÞÞ ¼ GðkÞ, which completes the proof. h
Proof of Theorem. Proposition 4.2 shows that if a node kis assigned to gateway GðkÞ then all nodes that fall on theshortest path from GðkÞ to k are also assigned to gatewayGðkÞ. This ensures that M disconnected spanning trees willbe constructed, which satisfies the requirements of the U-GSR problem. Each node is connected to its gatewaythrough the shortest path. Thus, the assignment and rout-ing given in (1) and (2), respectively are optimal. h
Theorem 4.1 implies that in the uncapacitated case ofthe U-GSR problem only the selection of the gateways isa hard combinatorial problem since the assignment androuting decisions can be given in polynomial time throughthe calculation of the shortest path matrix. The S can becalculated using, for example, the Floyd-Warshall algo-rithm, that runs on OðV3Þ time [17]. Thus, the Uncapacitat-ed GSR (U-GSR) problem resembles the uncapacitated FLP.Based on the above observations, we attempt to reformu-late the U-GSR problem.
The optimal assignment and routing of the U-GSR prob-lem can be computed using the shortest path matricesSðr; kÞ; pðr; kÞ. Note that each row of S;Sðr; :Þ, denotesthe shortest path cost from candidate gateway r to all othernodes, and each column of S;Sð:; kÞ, denotes the shortestpath cost from node k to all gateways. Let the variable x (asdefined in U-GSR) represent a feasible set of selected gate-ways. Then, each node k will be assigned to the gatewaywith the minimum entry in the cells of the sub-column ofk, defined as the intersection between column Sð:; kÞ androws fSðr; :Þ : xr ¼ 1g. This assigns k to the nearest gate-way. Hence, the minimum path cost for node k is givenby minr2RfSðr; kÞ : xr ¼ 1g. The U-GSR problem can nowbe written as follows,
minXk2V
minr2RfSðr; kÞ : xr ¼ 1g
subject toXr2R
xr ¼ M ð16Þ
xr 2 f0;1g; for all r 2 R ð17Þ
K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329 323
The above formulation has a non-linear objective andtherefore linear integer mathematical programming tech-niques cannot be used. We linearize the above programby using the boolean variable urk, which can be definedas follows:
urk ¼1 if r ¼ arg min
i2RfSði; kÞ : xr ¼ 1g
0 otherwise
(ð18Þ
The variable urk indicates the position in the S matrix ofthe minimum of the sub-column of k. The above definitionis equivalent to stating that each column of u has exactlyone non-zero element, the non-zero element appears onlyin rows r that are selected gateways (i.e. xr ¼ 1), and thatthe non-zero element has the same indices as the mini-mum of the corresponding sub-column. The above threeconditions are expressed by constraints (20)–(22) respec-tively in the linear integer programming formulation be-low, which we call the Uncapacitated Shortest Path Matrix(U-SPM) problem
minXk2V
Xr2R
urk �Sðr;kÞ
subject toXr2R
xr ¼M ð19ÞXr2R
urk¼1; for all k2V ð20Þ
urk6 xr; for all r 2R; k2V ð21ÞXi2R
uikSði;kÞ6Sðr;kÞþð1�xrÞK; r2R; k2V
ð22Þxr 2 f0;1g; for all r2R ð23Þurk 2 f0;1g; for all r2R; k2V ð24Þ
where K is an arbitrary large positive integer. The defini-tion of variables u in (18) is equivalent to constraints(20)–(22). Note that the sum
Pi2RuikSði; kÞ that appears
in the objective and constraint (22) is the shortest pathcost between node k and gateway r�, where r� is such thatur�k ¼ 1. Since we want to pick r� such that this shortestpath cost is the minimum, we force the sum to be less thanor equal to all other Sðr; kÞ for all r 2 R such that xr ¼ 1.When xr ¼ 0, constraint (22) is always satisfied due tothe large value of the constant K.
From the above discussion we have the following,
Corollary 4.3. The U-SPM problem is equivalent to the U-GSRproblem.
Note that variable u in the U-SPM problem that wasused to linearize the problem turns out to be equivalentto the assignment variables of the U-GSR problem. How-ever, given the S matrix and a set of selected gateways,both the assignment variables u and the routing are pre-determined. This has significant implications in the com-putational complexity as will be shown in Section 6.
4.2. The capacitated problem
Since in practice the gateways have a hard capacity lim-it on the aggregate number of flows (in terms of bit-rate)that they can support, we need to augment the formulationto take this constraint into account. We denote by W the
capacity of each gateway (without loss of generality we as-sume that all gateways have the same capacity limit) andassume that node i 2 V has a flow demand f ðiÞ (expressed,for example, in Kbps). Then the capacity constraint at eachgateway node can be written as follows:Xk2V
f ðkÞ � urk 6W � xr for all r 2 R ð25Þ
Adding constraint (25) to the U-GSR problem defines theCapacitated-GSR (C-GSR) problem. Similarly, adding con-straint (25) to the U-SPM defines the Capacitated-SPM (C-SPM) problem.
We should note that in the capacitated version of theSPM formulation the solution is not the optimal one.
Proposition 4.4. The C-SPM problem is not equivalent to theC-GSR problem. The C-SPM solutions are suboptimal to the C-GSR problem and the optimality gap can be arbitrary large.
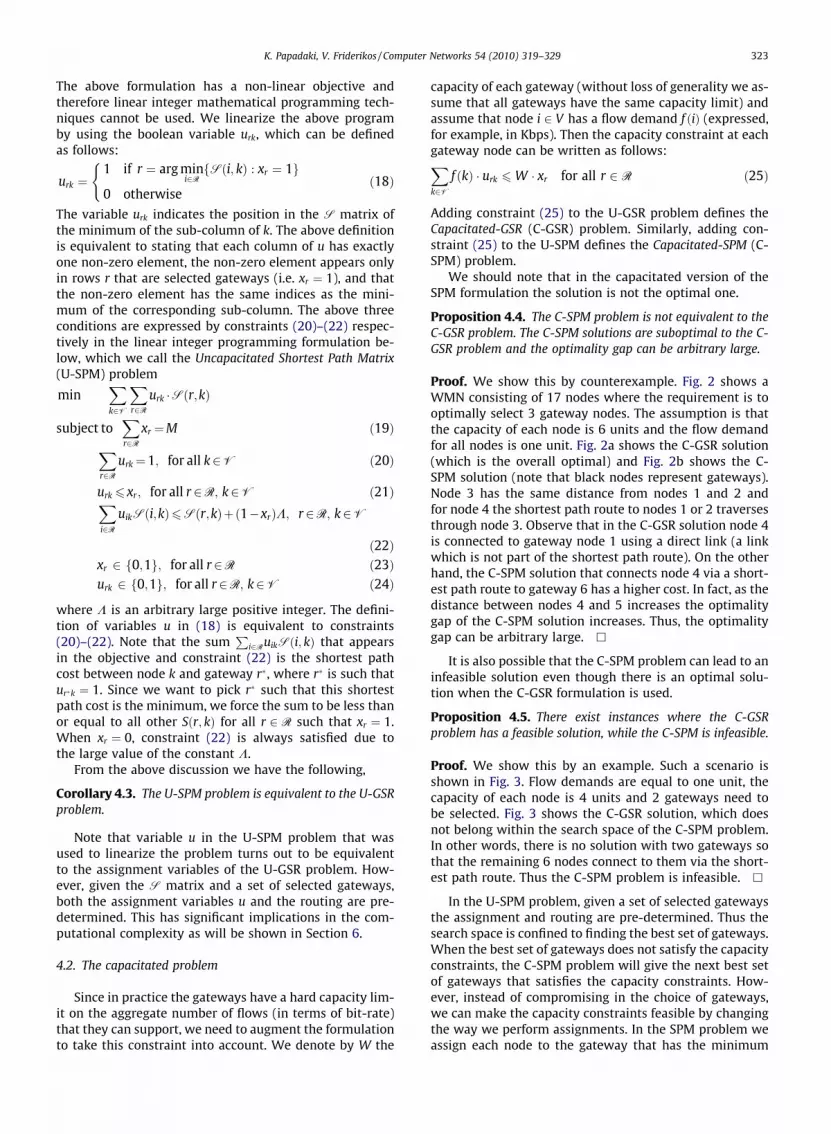
Proof. We show this by counterexample. Fig. 2 shows aWMN consisting of 17 nodes where the requirement is tooptimally select 3 gateway nodes. The assumption is thatthe capacity of each node is 6 units and the flow demandfor all nodes is one unit. Fig. 2a shows the C-GSR solution(which is the overall optimal) and Fig. 2b shows the C-SPM solution (note that black nodes represent gateways).Node 3 has the same distance from nodes 1 and 2 andfor node 4 the shortest path route to nodes 1 or 2 traversesthrough node 3. Observe that in the C-GSR solution node 4is connected to gateway node 1 using a direct link (a linkwhich is not part of the shortest path route). On the otherhand, the C-SPM solution that connects node 4 via a short-est path route to gateway 6 has a higher cost. In fact, as thedistance between nodes 4 and 5 increases the optimalitygap of the C-SPM solution increases. Thus, the optimalitygap can be arbitrary large. h
It is also possible that the C-SPM problem can lead to aninfeasible solution even though there is an optimal solu-tion when the C-GSR formulation is used.
Proposition 4.5. There exist instances where the C-GSRproblem has a feasible solution, while the C-SPM is infeasible.
Proof. We show this by an example. Such a scenario isshown in Fig. 3. Flow demands are equal to one unit, thecapacity of each node is 4 units and 2 gateways need tobe selected. Fig. 3 shows the C-GSR solution, which doesnot belong within the search space of the C-SPM problem.In other words, there is no solution with two gateways sothat the remaining 6 nodes connect to them via the short-est path route. Thus the C-SPM problem is infeasible. h
In the U-SPM problem, given a set of selected gatewaysthe assignment and routing are pre-determined. Thus thesearch space is confined to finding the best set of gateways.When the best set of gateways does not satisfy the capacityconstraints, the C-SPM problem will give the next best setof gateways that satisfies the capacity constraints. How-ever, instead of compromising in the choice of gateways,we can make the capacity constraints feasible by changingthe way we perform assignments. In the SPM problem weassign each node to the gateway that has the minimum
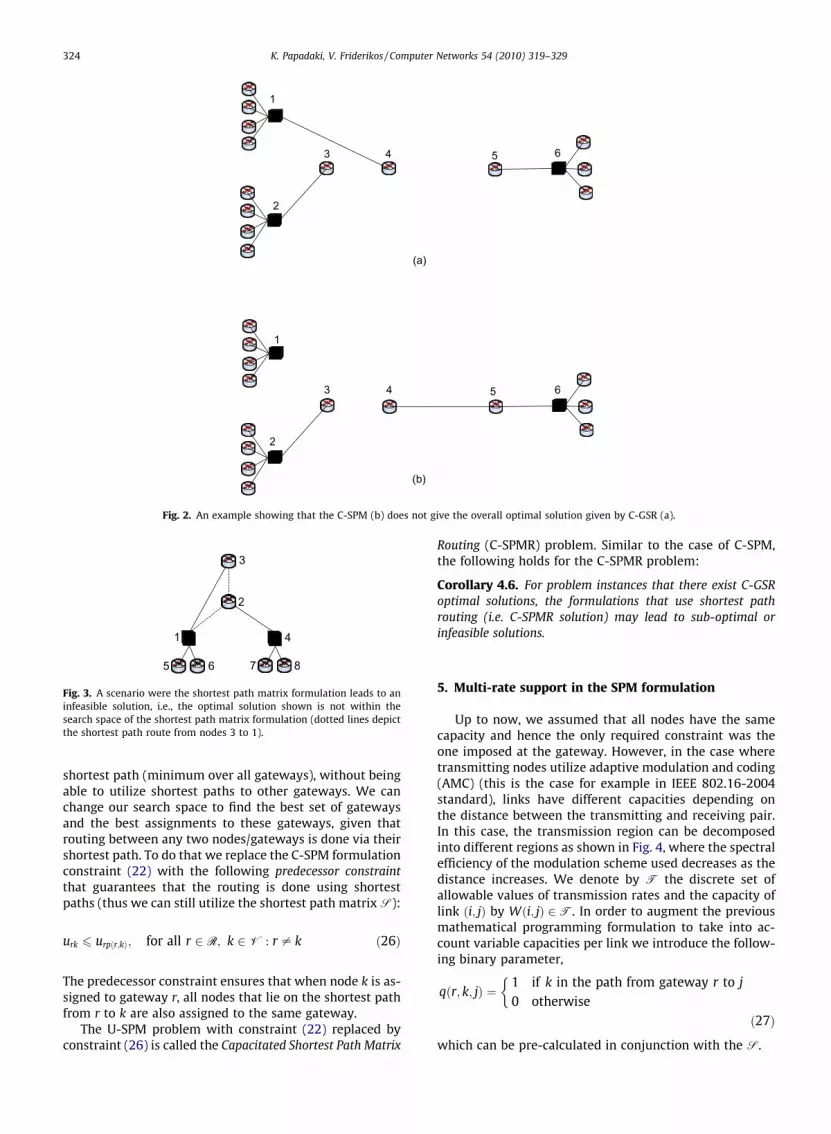
Fig. 2. An example showing that the C-SPM (b) does not give the overall optimal solution given by C-GSR (a).
Fig. 3. A scenario were the shortest path matrix formulation leads to aninfeasible solution, i.e., the optimal solution shown is not within thesearch space of the shortest path matrix formulation (dotted lines depictthe shortest path route from nodes 3 to 1).
324 K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329
shortest path (minimum over all gateways), without beingable to utilize shortest paths to other gateways. We canchange our search space to find the best set of gatewaysand the best assignments to these gateways, given thatrouting between any two nodes/gateways is done via theirshortest path. To do that we replace the C-SPM formulationconstraint (22) with the following predecessor constraintthat guarantees that the routing is done using shortestpaths (thus we can still utilize the shortest path matrix S):
urk 6 urpðr;kÞ; for all r 2 R; k 2V : r – k ð26Þ
The predecessor constraint ensures that when node k is as-signed to gateway r, all nodes that lie on the shortest pathfrom r to k are also assigned to the same gateway.
The U-SPM problem with constraint (22) replaced byconstraint (26) is called the Capacitated Shortest Path Matrix
Routing (C-SPMR) problem. Similar to the case of C-SPM,the following holds for the C-SPMR problem:
Corollary 4.6. For problem instances that there exist C-GSRoptimal solutions, the formulations that use shortest pathrouting (i.e. C-SPMR solution) may lead to sub-optimal orinfeasible solutions.
5. Multi-rate support in the SPM formulation
Up to now, we assumed that all nodes have the samecapacity and hence the only required constraint was theone imposed at the gateway. However, in the case wheretransmitting nodes utilize adaptive modulation and coding(AMC) (this is the case for example in IEEE 802.16-2004standard), links have different capacities depending onthe distance between the transmitting and receiving pair.In this case, the transmission region can be decomposedinto different regions as shown in Fig. 4, where the spectralefficiency of the modulation scheme used decreases as thedistance increases. We denote by T the discrete set ofallowable values of transmission rates and the capacity oflink ði; jÞ by Wði; jÞ 2T. In order to augment the previousmathematical programming formulation to take into ac-count variable capacities per link we introduce the follow-ing binary parameter,
qðr; k; jÞ ¼1 if k in the path from gateway r to j
0 otherwise
�ð27Þ
which can be pre-calculated in conjunction with the S.

Fig. 4. Pictorial representation of the multi-rate regions in transmission.
K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329 325
5.1. Optimal allocation of demand in each link
When the out-degree of node k (assigned to gateway r)is greater than one, the amount of traffic allocated in eachof these links can be controlled by the fraction of time thateach link is allowed to transmit. To do so, a continuous var-iable trkj is introduced in the formulation to optimally allo-cate the fraction of time that link ðk; jÞ should transmit tosupport the flow routed at node j. The following con-straints need to be added in the formulation,Xj2V :pðr;jÞ¼k
trkj ¼ urk; for all r 2 R; k 2V ð28Þ
0 6 trkj 6 1; for all r 2 R; k; j 2V ð29Þ
Using the variable trkj, the capacity constraint for each linkin the network can be written as follows:X
j2V
f ðjÞqðr; k; jÞurj 6Wðpðr; kÞ; kÞtrpðr;kÞk
for all r 2 R; k 2V : r – k ð30Þ
To motivate the above multi-rate extensions for the SMP/GSR mathematical programming formulations, we havethe following result.
Proposition 5.1. Using the maximum rate from the discreteset T may not lead to the optimal solution for the multi-rateversion of the GSR problem.
Proof. We show this by counterexample. Assume thatthere are only two available link rates, i.e., W1 for links thathave distances 0 6 d 6 d1 and W2 < W1 for links with dis-tances d1 6 d 6 d2. In the topology shown in Fig. 5 nodes Aand D represent the gateways and dx� d1. Observe thatwhen only links with capacities W1 are used, node B willbe connected to gateway D, having as a predecessor thenode C. On the other hand, when links with capacitiesW2 can also be used, then node B will be connected witha direct link of capacity W2 with the gateway node A. We
Fig. 5. An example where using a link with a lower rate ðW2 < W1Þincreases the quality of the solution.
further assume that the cost for calculating the shortestpath is the distance of the link to the power of b > 1. Then,by taking into account only the links that change in the twoscenarios, for the case of the single rate the cost CSR is3ðd1 � dxÞb and for the multi-rate the cost CMR will be,ðd1 þ dxÞb þ ðd1 � dxÞb. It can be easily shown that for val-ues of dx
dx <d1ð21=b � 1Þ
21=b þ 1ð31Þ
we have CSR � CMR > 0. h
5.2. Further extensions in the mathematical programmingformulations
5.2.1. Hop limit on each pathThe previously discussed formulations can be aug-
mented to incorporate an upper limit, h, on the numberof hops that is allowed in the path from each node to itsgateway. Let us denote by Hrk the number of hops on theshortest path from gateway r to node k. This matrix canbe easily constructed by the all-pairs shortest path matrix(see Section 4). To include the hop limit requirement thefollowing constraint needs to be added,
Hrkurk 6 h; for all r 2 R; k 2V ð32Þ
5.2.2. Designating selected nodes as leafsIn practice, there are nodes within the WMN that do not
provide the level of reliability required by the networkoperator to be enabled as relaying nodes. Such reliabilityproblems stem from several reasons, ranging from userpreferences to operational characteristics in terms of howoften these nodes are shut-down. Thus, it is a rationalstrategy for network operators to incorporate these nodesas leaf nodes. Therefore, the reliability of the whole net-work can be increased. To incorporate this requirementwe set the cost of links emanating from nodes that areunreliable to a very high value.
5.2.3. Lower bound on the demand served by each gatewaynode
In practice it may be useful to incorporate a lowerbound x on the amount of traffic that each selected gate-way needs to satisfy. Hence, we defer from selecting as agateway a node that supports low demand for Internetconnectivity. This is because it may not be economical to
326 K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329
maintain and administrate such a root node. To incorpo-rate this option the following constraint needs to be addedin the mathematical programming formulation,Xk2V
fk � urk P x � xr for all r 2 R ð33Þ
To avoid infeasibility we need to relax the hard constrainton the number of gateways. Therefore constraint (19)needs to be re-written as follows:Xr2R
xr 6 M ð34Þ
6. Numerical investigations
We conduct numerical simulations on randomly de-ployed WMNs, confined in a 3 � 3 km2 area with variablenumber of nodes jV j, number of candidate gatewaysR ¼ jRj, and number of gateways M that need to be de-ployed. The following simple path loss model has beenused (the results are independent of the particular pathloss model used, hence more elaborate path loss modelscan also be applied),
PLðdÞ ¼ PLðdoÞ þ 10blog10ðd=doÞ ð35Þ
where d is the distance between transmitter and receiver,PLðdoÞ is the free space path loss at reference distance do
(we assume do to be 50 m), b is the path loss exponentðb ¼ 3Þ. The mixed integer linear programs are solvedusing the CPLEX 9.1 solver. The time limit on the calcula-tions has been set at 2000 s. The runs are taken on an IntelPentium III, 2GHz, 512MB RAM machine. If it is not men-tioned otherwise we assume that the of set of candidatenodes to act as gateways ðRÞ is equal to the set of all nodesin the network ðVÞ. That means every node in the networkis also a candidate gateway node. This assumption ex-
50 100 150 200 2500
5
10
15
20
25
30
35
40
Number o
Com
puta
tiona
l Tim
e (in
sec
onds
)
R = 20M = 7
R = 30M = 10
R = 50M = 20
R = 60M = 25
R = 60M = 28
Fig. 6. Computational times (in seconds) using the U-SPM formulation for difcandidate gateways and M the number of gateways that need to be deployed).
presses the worst case scenario in terms of computationalrequirements since it has the highest combinatorialcomplexity.
6.1. Uncapacitated experiments
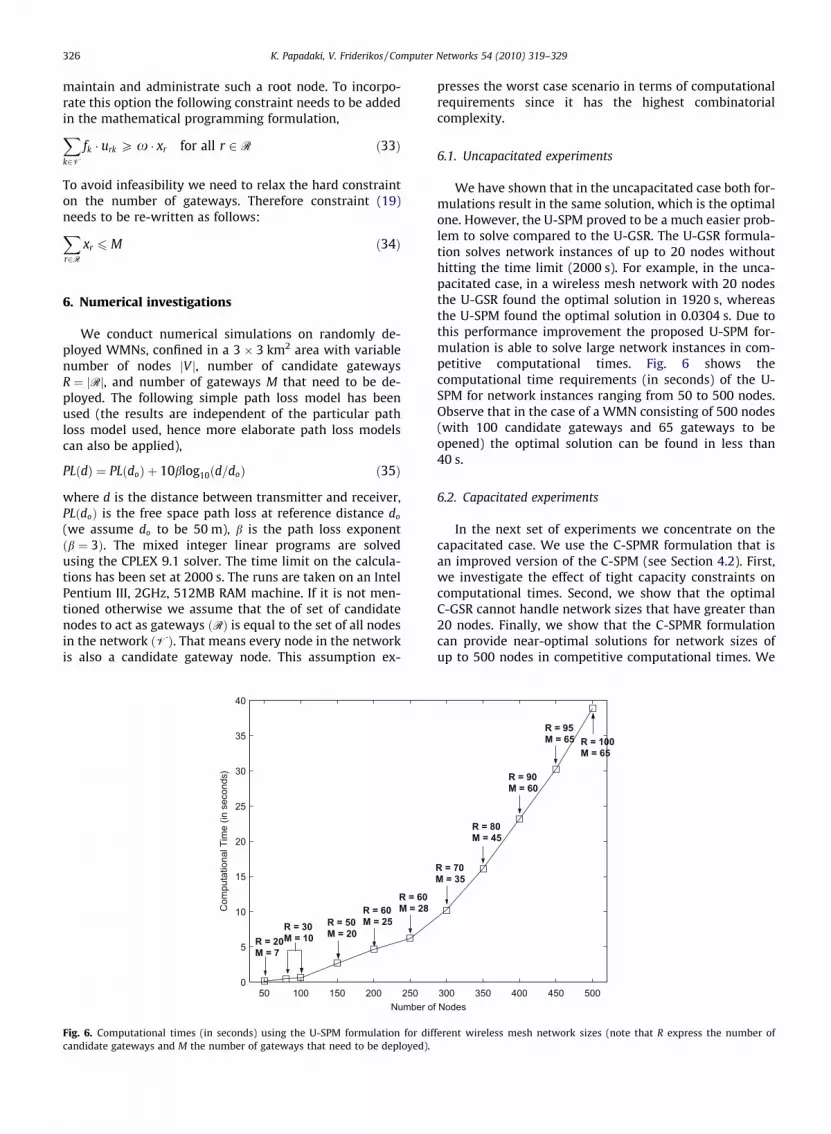
We have shown that in the uncapacitated case both for-mulations result in the same solution, which is the optimalone. However, the U-SPM proved to be a much easier prob-lem to solve compared to the U-GSR. The U-GSR formula-tion solves network instances of up to 20 nodes withouthitting the time limit (2000 s). For example, in the unca-pacitated case, in a wireless mesh network with 20 nodesthe U-GSR found the optimal solution in 1920 s, whereasthe U-SPM found the optimal solution in 0.0304 s. Due tothis performance improvement the proposed U-SPM for-mulation is able to solve large network instances in com-petitive computational times. Fig. 6 shows thecomputational time requirements (in seconds) of the U-SPM for network instances ranging from 50 to 500 nodes.Observe that in the case of a WMN consisting of 500 nodes(with 100 candidate gateways and 65 gateways to beopened) the optimal solution can be found in less than40 s.
6.2. Capacitated experiments
In the next set of experiments we concentrate on thecapacitated case. We use the C-SPMR formulation that isan improved version of the C-SPM (see Section 4.2). First,we investigate the effect of tight capacity constraints oncomputational times. Second, we show that the optimalC-GSR cannot handle network sizes that have greater than20 nodes. Finally, we show that the C-SPMR formulationcan provide near-optimal solutions for network sizes ofup to 500 nodes in competitive computational times. We
300 350 400 450 500f Nodes
R = 70M = 35
R = 80M = 45
R = 90M = 60
R = 95M = 65 R = 100
M = 65
ferent wireless mesh network sizes (note that R express the number of
K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329 327
evaluate the solution performance of the C-SPMR by usinga lower bound of the optimal solution.
6.2.1. Effect of capacity constraints on computational timesThe computational times in C-SPMR are heavily affected
by how constrained are the problems at hand. As the totalflow demand in the network
PVi¼1f ðiÞ
� �approaches the
aggregate capacities of the gateway nodes ðM �WÞ, thecomputational time sharply increases. To study this behav-ior more formally we measure how tight the capacity con-strains are by using the parameter c, which is defined asfollows:
c ¼ 1�PV
i¼1f ðiÞM �W
!� 100 ð36Þ
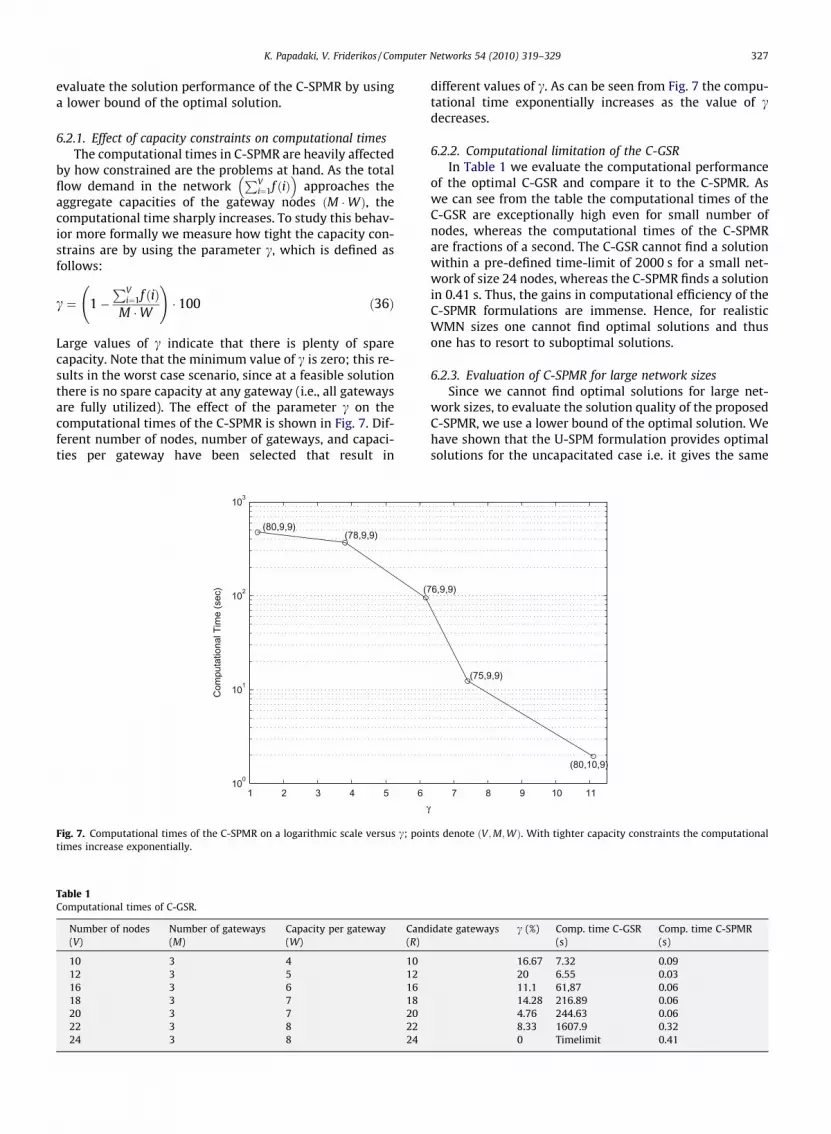
Large values of c indicate that there is plenty of sparecapacity. Note that the minimum value of c is zero; this re-sults in the worst case scenario, since at a feasible solutionthere is no spare capacity at any gateway (i.e., all gatewaysare fully utilized). The effect of the parameter c on thecomputational times of the C-SPMR is shown in Fig. 7. Dif-ferent number of nodes, number of gateways, and capaci-ties per gateway have been selected that result in
1 2 3 4 5 6100
101
102
103
Com
puta
tiona
l Tim
e (s
ec) (
(78,9,9)(80,9,9)
Fig. 7. Computational times of the C-SPMR on a logarithmic scale versus c; pointimes increase exponentially.
Table 1Computational times of C-GSR.
Number of nodes(V)
Number of gateways(M)
Capacity per gateway(W)
Cand(R)
10 3 4 1012 3 5 1216 3 6 1618 3 7 1820 3 7 2022 3 8 2224 3 8 24
different values of c. As can be seen from Fig. 7 the compu-tational time exponentially increases as the value of cdecreases.
6.2.2. Computational limitation of the C-GSRIn Table 1 we evaluate the computational performance
of the optimal C-GSR and compare it to the C-SPMR. Aswe can see from the table the computational times of theC-GSR are exceptionally high even for small number ofnodes, whereas the computational times of the C-SPMRare fractions of a second. The C-GSR cannot find a solutionwithin a pre-defined time-limit of 2000 s for a small net-work of size 24 nodes, whereas the C-SPMR finds a solutionin 0.41 s. Thus, the gains in computational efficiency of theC-SPMR formulations are immense. Hence, for realisticWMN sizes one cannot find optimal solutions and thusone has to resort to suboptimal solutions.
6.2.3. Evaluation of C-SPMR for large network sizesSince we cannot find optimal solutions for large net-
work sizes, to evaluate the solution quality of the proposedC-SPMR, we use a lower bound of the optimal solution. Wehave shown that the U-SPM formulation provides optimalsolutions for the uncapacitated case i.e. it gives the same
7 8 9 10 11γ
(80,10,9)
(75,9,9)
76,9,9)
ts denote ðV ;M;WÞ. With tighter capacity constraints the computational
idate gateways c (%) Comp. time C-GSR(s)
Comp. time C-SPMR(s)
16.67 7.32 0.0920 6.55 0.0311.1 61,87 0.0614.28 216.89 0.064.76 244.63 0.068.33 1607.9 0.320 Timelimit 0.41

Table 2Computational times and upper bounds on the optimality gap for C-SPMR in large wireless mesh network topologies.
Number of nodes(V)
Number of gateways(M)
Capacity per gateway(W)
Candidategateways (R)
c(%)
Computationaltime (s)
Upper bound on optimalitygap (%)
80 10 10 80 20 7.25 7.8480 20 10 80 60 0.4 090 11 10 90 18.1 17.98 14.24100 12 10 100 16.7 28.61 6.92110 13 10 110 15.4 225 18.77120 14 10 120 14.3 107 7.72140 16 10 140 12.5 90.1 10.87
Table 3Computational times and upper bounds on the optimality gap for C-SPMR (best solution within 100 s) in large wireless mesh network topologies.
Number ofnodes (V)
Number ofgateways (M)
Capacity pergateway (W)
Candidategateways (R)
c(%)
Terminated in less than100 s?
Upper bound on optimalitygap (%)
150 20 9 50 17 16.6 12.5200 25 10 60 20 34.3 6.9250 28 11 60 19 56.2 9.1300 35 11 70 22 No 10.5350 45 10 80 22 No 5.1400 60 8 90 17 No 11.5500 65 10 100 23 No 12.5
328 K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329
solutions as the U-GSR (see Section 4.1). This solution canserve as a lower bound to the solution of the C-GSR: the C-GSR formulation is the same as the U-GSR with an addi-tional constraint, which can only increase the objectivefunction value. Thus, we solve the U-SPM to find a lowerbound on the optimal solution. The gap between the lowerbound (U-SPM) and the solution of the C-SPMR serves asan upper bound on the optimality gap, since the optimalsolution lays between the two. The objective functions ofthe above problems have the following property:
U-SPM ¼ U-GSR 6 C-GSR 6 C-SPMR ð37Þ
In Table 2 we evaluate the performance of the C-SPMR forlarge wireless mesh network sizes of up to 140 nodes. Ob-serve from the table that the optimality gap is small (lessthan 18%) while at the same time the computational timesare very competitive across various values of c and net-work sizes. Reasonable values of c have been used (be-tween 10% and 20%), since networks are not deployedwith strict capacity constraints to provision for future de-mand. Note that the existence of a non-zero optimalitygap implies that the capacity constraints are active. Ob-serve also that in the scenario where c ¼ 60 the capacityconstraints are not active and thus the optimality gap iszero.
In the last experiments, shown in Table 3, we set a time-limit of a 100 s on the Integer Programming solver and getthe best feasible integer solution for the C-SPMR found sofar. As before, we evaluate the quality of this solution usingthe lower-bound given by U-SPM. Even within the shorttime-limit of 100 s the proposed C-SPMR gives solutionswith small optimality gaps for network sizes of up to 500nodes.
7. Concluding remarks
In this paper we provide mathematical programmingformulations for the problem of joint routing and gatewayselection in wireless mesh networks. The baseline mathe-matical programming formulation (C-GSR) can only handlenetwork instances of up to 22 nodes in a reasonable time(i.e., less than 2000 s). Our proposed reformulation man-ages to solve instances of up to 500 nodes optimally inthe uncapacitated case, and with small optimality gaps inthe capacitated case, in competitive computational times.This is a dramatic performance improvement which can al-low a very detailed study of WMNs planning and optimiza-tion since the solutions of the mathematical programsdefine the physical limitations as they pertain to the taskof gateway selection and routing in the network. In addi-tion, a set of extensions have been outlined that have notbeen formally defined previously.
There are a number of possible future avenues of re-search. Multi-path routing support within the frameworkof gateway selection stands as a natural extension of thework. A more challenging one would be to extend the pro-posed formulations by utilizing tools from the area of sto-chastic programming to capture non-deterministic trafficdemands.
References
[1] Carl Eklund, Roger Marks, Kenneth Stanwood, Stanley Wang, IEEEstandard 802.16: a technical overview of the WirelessMAN airinterface for broadband wireless access, IEEE CommunicationMagazine 40 (June) (2002) 98–107.
[2] IEEE Std 802.16a-2003: IEEE Standard for Local and metropolitanarea networks – Part 16: Air Interface for Fixed Broadband WirelessAccess Systems – Amendment 2: Medium Access Control

K. Papadaki, V. Friderikos / Computer Networks 54 (2010) 319–329 329
Modifications and Additional Physical Layer Specifications for 2-11GHz, 2003.
[3] MIT Roofnet Project, <http://www.pdos.lcs.mit.edu/roofnet>.[4] SeattleWireless, Community Wireless Network project, <http://
www.seattlewireless.net>.[5] CUWiNware Wireless Network at Champaign-Urbana, <http://
www.cuwireless.net>.[6] Self Organizing Wireless Mesh Networks, <http://
research.microsoft.com/en-us/projects/mesh>.[7] Richard Draves, Jitendra Padhye, Brian Zill, Routing in multi-radio,
multi-hop wireless mesh networks, in: International Conference onMobile Computing and Networking (MOBICOM ’04), Philadelphia,PA, September 2004.
[8] Douglas De Couto, Daniel Aguayo, John Bicket, Robert Morris, a high-throughput path metric for multi-hop wireless routing, in: ACMInternational Conference on Mobile Computing and Networking(MobiCom 03), San Diego, California, September 2003.
[9] Katerina Papadaki, Vasilis Friderikos, Approximate dynamicprogramming for link scheduling in wireless mesh networks,Computers and Operations Research 35 (12) (2007) 3848–3859.
[10] K. Ramachandran, E. Belding, K. Almeroth, M. Buddhikot,Interference-aware channel assignment in multi-radio wirelessmesh, in: IEEE Infocom 2006, Barcelona, Spain, 2006.
[11] P. Mirchandani, R. Francis, Discrete Location Theory, John Wiley andSons, New York, 1990.
[12] Zvi Drezner, Horst Hamacher, Facility Location: Applications andTheory, Springer, 2004.
[13] D. Shmonys, E. Tardos, K. Aardal, Approximation algorithms forfacility location problems, in: ACM Symposium on Theory ofComputing, 1997, pp. 265–274.
[14] Y. Bejerano, Efficient integration of multihop wireless and wirednetworks with QoS constraints, IEEE/ACM Transactions onNetworking 12 (6) (2004) 1064–1078.
[15] B. Aoun, R. Boutaba, Y. Iraqi, G. Kenward, Gateway placementoptimization in wireless mesh networks with QoS Constraints, IEEEJournal on Selected Areas in Communications 24 (11) (2006) 2127–2136.
[16] Fan Li Yu Wang Xiang-Yang Li, Gateway Placement for throughputoptimization in wireless mesh networks, in: IEEE InternationalConference on Communications (ICC), Scotland, 24–28 June 2007.
[17] Ravindra K. Ahuja, Thomas L. Magnati, James B. Orlin, NetworkFlows: Theory, Algorithms and Applications, Prentice-Hall, NewJersey, 1993.
Katerina Papadaki graduated from the Uni-versity of California at Berkeley, with a doublemajor in Pure Mathematics and Statistics in1994. She completed the M.Sc. in OperationalResearch at the London School of Economicsin Operational Research in 1996. She com-pleted her Ph.D. at Princeton University(2001) in the Department of OperationsResearch and Financial Engineering, whereshe developed approximate dynamic pro-gramming algorithms for transportationproblems. She is currently a Lecturer at the
Operational Research Department at London School of Economics (since
2002). Her research interest are resource allocation problems in wirelesstelecommunications. She is a member of the Institute for OperationsResearch and the Management Sciences, the Institution of Engineeringand Technology and the Operational Research Society.
Vasilis Friderikos graduated from the Aris-totle University of Thessaloniki, Greece,Department of Electrical and Computer Engi-neering, with major in Telecommunications,in 1998. He completed the M.Sc. by Researchin Telecommunications (with Distinction) atthe Centre for Telecommunications Research(London) in 1999. During his Ph.D. he wasworking as a Research Associate in Mobile-VCE Core-2 research programme on algorith-mic aspects of QoS enabled pure IP basedmobile/wireless networks. He has been
awarded a summer research fellowships at British Telecom Laboratories
in 2005 for conducting research in the area of wireless multi-hop meshnetworks. He has also been seconded at the Wireless Information Net-work Laboratory (WINLAB) at Rutgers University, New Jersey as a visitingresearcher in winter 2005. He is currently a Lecturer at King’s CollegeLondon and his research interests revolve around cross layer optimizationalgorithms with emphasis on scheduling for single or multi-hop wirelesspacket transmission. He is currently co-investigator and work packageleader in the EPSRC Delivery Efficiency research project and also a co-investigator in the EC-FP6 ICT Creating Ubiquitous Intelligent SensingEnvironments (CRUISE) Network of Excellence (NoE) project. He is also anAlumni Business Fellow of the London Technology Network(www.ltnetwork.org) representing the Department of Electronic Engi-neering at various LTN events. He is a member of the Institute of Elec-tronics and Electrical Engineers, the Institution of Engineering andTechnology and the Institute for Operations Research and the Manage-ment Sciences Technical Section on Telecommunications.