equity-oriented aircraft collision avoidance model
TRANSCRIPT

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS 1
Equity-Oriented Aircraft Collision Avoidance ModelDavid Rey, Christophe Rapine, Vinayak V. Dixit, and Steven Travis Waller
Abstract—The continuing increase in air travel demand com-bined with the saturation of air traffic networks lead to recurrentcongestion episodes. Among the many elements responsible for theescalation of air traffic management costs, we focus particularly onthe impact of conflict-resolution strategies that arise in congestednetworks. In air traffic control, a conflict occurs when two ormore aircraft fly too close to one another. While many automatedconflict-resolution methods have been proposed, most of themcannot be integrated without a profound revision of traffic controlprocedures as they lack interaction with air traffic controllers(ATCs). Recently, subliminal speed control has been shown tobe a promising approach to reducing the impact of air conflictsonto ATCs’ workload and potentially improve airspace capacity.From the perspective of airlines however, little has been done toquantify the impact of conflict-resolution strategies onto directoperating costs. We address this gap by introducing an innovativeformulation for the aircraft collision avoidance problem, whichintegrates the economic profile of flights and promotes equitablesolutions. We present a goal programming-based model designedto minimize the deviation from fair solutions during the resolutionof potential conflicts. The performance of the model is evaluatedusing a fuel-equivalent conflict-resolution scheme, hence offeringa sustainable framework to efficiently and equitably resolve airconflicts.
Index Terms—Air traffic, conflict resolution, equity, mixed-integer linear programming (MILP).
I. INTRODUCTION
TODAY, the impact of flight delay on airlines Direct Oper-ating Costs (DOC) is estimated to be more than $5 billion
for European airlines and $10 billion for U.S. airlines [1],[2]. The American Next-Generation Air Transportation System(NextGen) and its European counterpart, i.e., the Single Euro-pean Sky Air Traffic Management Research (SESAR) project,have been launched, aiming to improve air traffic operationsat the network level. Among the many elements responsiblefor the increase of air traffic management (ATM) costs, wefocus on the impact of conflict-resolution strategies, which arisein congested networks. In air traffic control (ATC), a conflictoccurs when two or more aircraft fly too close one from eachother. The separation norms enforced by the International Civil
Manuscript received August 30, 2013; revised January 29, 2014 andApril 23, 2014; accepted May 29, 2014. The Associate Editor for this paperwas J.-P. B. Clarke.
D. Rey and V. V. Dixit are with the School of Civil and EnvironmentalEngineering, University of New South Wales, Sydney, NSW 2052, Australia(e-mail: [email protected]).
C. Rapine is with the LGIPM, Université de Lorraine, 57045 Metz Cedex,France.
S. T. Waller is with the School of Civil and Environmental Engineering andNICTA, University of New South Wales, Sydney, NSW 2052, Australia.
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TITS.2014.2329012
Aviation Organization (ICAO) during the cruise stage define aseparation zone for each aircraft. Two aircraft are said to be inconflict if an intruder penetrates the separation zone of another.The detection and the resolution of potential air conflicts areexecuted by air traffic controllers (ATCs) who continuouslymonitor aircraft trajectories. Due to the high stakes involved,worst-case scenarios are generally anticipated and handledthrough conservative maneuvers designed to guarantee aircraftseparation rather than to reduce operations costs. Conflict reso-lution procedures are mainly a combination of heading changeand flight level reassignement and are estimated to have asignificant impact on airlines DOC and on ATCs’ workload [3].
In the past few years, several methods have been developed tosolve air conflicts, many of which have been shown to be ableto successfully resolve dense traffic scenarios. Most of theseapproaches, however, fail to address system integration issuesthat arise in ATC. In the current ATM paradigm, ATCs continu-ously monitor the evolution of traffic in one or several airspacesectors, and today, it is widely acknowledged that airspace ca-pacity is related to ATCs’ workload [4], [5]. Recently, with theadvent of advanced flight management systems (FMSs) capableof tracking 4-D business trajectories with improved accuracy,alternative conflict-resolution methods have emerged. In partic-ular, the potential of subliminal speed control as a deconflictiontool has been investigated in the en-route air traffic soft manage-ment ultimate system (ERASMUS) project and proved to be apromising approach. Subliminal speed control was introducedby Villiers [6] and consists of minor trajectory adjustments aim-ing to provide aircraft separation without disturbing ATCs intheir task. Drogoul et al. [7] have carried out human-in-the-loopexperiments during the ERASMUS project to investigate thepotential of this conflict-resolution strategy and confirmed theexistence of (subliminal) speed variation ranges (from −12% to+6% of aircraft nominal speeds) almost imperceptible byATCs. Rey et al. [8] introduced a subliminal-speed-control-based conflict-resolution model, which proved to be able tosignificantly reduce the impact of potential conflicts onto ATCs’workload using this available speed control range. In this paper,we extend this methodology to introducing a novel equity-oriented conflict-resolution (ECR) model. The ECR modelcombines three optimization stages, which attempt to
1) resolve a maximum number of potential conflicts;2) promote fair conflict-resolution maneuvers;3) reduce the delay induced by the trajectory adjustments.
The objective of this goal programming approach is to refinethe allocation of resources in conflict-resolution strategies topromote fair solutions where airlines are equally affected bythe trajectory adjustments. Equity-oriented collision avoidanceschemes are not only useful in reducing ATCs’ workload but
1524-9050 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
will also readily be acceptable to airlines as a conflict-resolutionstrategy. To the best of our knowledge, no equity-orientedaircraft collision avoidance model has yet been proposed.
We start by reviewing the literature on equity-oriented ap-proaches in ATM and conflict detection and resolution (CD&R)algorithms (see Section II). We then introduce the mathematicalformulation of the ECR model (see Section III). The experi-mental design and the simulation framework used to evaluatethe performance of the model are presented in Section IV. Inparticular, we propose to implement a fuel-equivalent speedregulation scheme together with realistic economic data sets,and we use a conflict generator to simulate aircraft encountersand test the ECR model. We report the results of a case studyconducted on two conflict-resolution benchmark problems inSection V. The results obtained show that the ECR model isable to significantly improve the fairness of resource allocationschemes in conflict-resolution strategies with only a moder-ate impact on airlines DOC and on the total delay induced.Futhermore, the model is formulated using mixed-integer linearprogramming (MILP) and is proven to be computationnallyefficient on dense traffic scenarios.
II. LITERATURE REVIEW
The air traffic flow management (ATFM) problem has beenextensively studied from a system-optimal perspective with theobjective of minimizing the total delay in an air traffic network.In particular, Bertsimas and Patterson [9] presented a determin-istic 0–1 integer programming (IP) model to solve the ATFMproblem, where airports and en-route sector capacities areconsidered. Lulli and Odoni [10] discussed the tradeoff existingbetween system-optimal and equity-oriented approaches in theATFM problem. Recently, Bertsimas et al. [11] introduced asuperlinear objective function, which is shown to improve thedistribution of delay among flights with regard to a conventionallinear objective function used for ATFM. In an effort to quantifythe price of fairness in decision-making problems where mul-tiple stakeholders are involved, Bertsimas et al. [12] presenteda metric to measure the relative system efficiency loss underan equitable allocation of resources and illustrate their study onthe ATFM problem. These results highlight the difficult task ofmanaging air traffic networks from the perspective of airlinesand stress the need to develop equity-oriented approaches.Most ATFM models are macroscopic frameworks designed tooptimize aggregated costs with an emphasis on traffic flow op-erations; consequently, they generally do not take into accountaircraft separation in the elaboration of aircraft trajectories.Sherali et al. [13], [14] presented an airspace planning andcollaborative decision-making model (APCDM) designed tooptimize aircraft trajectories subject to safety, ATC-related, andequity constraints. The APCDM seek to evenly distribute theimpact of trajectory modifications onto airline operation coststhrough an airline collaboration cost function. In this paper,we pursue a similar objective with a focus on the trajectorymodifications induced by the resolution of potential conflicts.
The research literature on CD&R algorithms contains manyefforts designed to improve airspace capacity and reduce con-gestion with automatic conflict-resolution procedures as pre-
sented in a survey by Kuchar and Yang [15]. In this review,however, most of the solution methods presented combineheading change and flight level reassignment maneuvers toresolve conflicts and would require a profound revision of ATCprocedures to be integrated. Conversely, speed-control-basedmethods provide an attractive regulation framework. Bilimoria[16] introduced a geometric approach designed to minimizethe deviation from a nominal speed vector. While the modelis extended to conflicts involving multiple aircraft, the problemis sequentially solved, which prevents global optimal solutionsto be found. Pallotino et al. [17] proposed a first global op-timization approach using MILP to minimize the total flighttime. Constans et al. [18] presented a CD&R algorithm toreduce the duration of conflicts using aircraft crossing times.A hybrid CD&R algorithm that combines speed control andheading changes to minimize the fuel expenditures involvedin conflict-resolution maneuvers was developed by Vela et al.[19]. The authors validate their model in a realistic setting basedon current air-traffic patterns in a US control center. In an alter-native hybrid framework, speed control is combined with flightlevel reassignment maneuvers to resolve scenarios that requiremore than speed adjustments [20]. A weighted-sum approachhas been proposed by Alonso-Ayuso et al. [21], in which apenalty is used to improve the distribution of conflict-resolutionmaneuvers. Recently, Cafieri and Durand [22] introduced anonlinear formulation to separate aircraft while minimizingthe deviation to aircraft nominal trajectories. Rey et al. [8]proposed a subliminal speed control model designed to reducethe impact of conflict onto ATCs’ workload; this contributionis a continuation of this research with a focus on the fairness ofthe resource allocation scheme therein.
III. ECR MODEL
Here, we present the ECR model. We start by introducingthe resource allocation constraint, which limits the amount ofresources available for deconfliction. We then present a three-stage approach to 1) solve the aircraft collision avoidanceproblem, 2) promote fair resource allocation schemes, and3) reduce the total delay induced by the trajectory adjustments.
A. Resource Allocation Constraint
In air traffic operations, aircraft trajectories are managedthrough time-of-arrival deadlines. That is, the required timeof arrival (RTA) concept has been highly promoted for themanagement of aircraft 4-D business trajectories within theNextGen and SESAR projects [23], [24]. For the resolutionof the model, we assume that aircraft follow linear trajectoriesbetween consecutive waypoints during the cruise stage and thatspeed variations are instantaneous. Let tif be the crossing timeof a flight f at a given point i on its path P(f). This crossingtime depends on its speed vif on segment [i−, i], where i− isthe predecessor of point i on the path of f and on the distanceDi,i−
f between i− and i. We have
tif ≡Di,i−
f
vif+ ti−f (1)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
REY et al.: EQUITY-ORIENTED AIRCRAFT COLLISION AVOIDANCE MODEL 3
and we define the constraint on the speed of flight f as
V f ≤ vif ≤ V f ∀ f ∈ F , i ∈ P(f) (2)
where the interval [V f , V f ] represents the available resourcesof flight f , that is, the allowed speed modulation range for f .This resource constraint can be expressed using the crossingtimes of flights as
tif ≤ tif ≤ tif ∀ f ∈ F , i ∈ P(f) (3)
where the bounds are defined as
tif ≡Di,i−
f
V f
+ ti−f and tif ≡
Di,i−f
V f
+ ti−f . (4)
Using this recursive formulation, the trajectories of flightscan be adjusted on every segment [i−, i]. Constraint (3) isdenoted as the resource allocation constraint, and variables tifare the main decision variables in the model.
B. First Stage: Conflict Resolution
Let Dff ′(t) be the Euclidean distance between two flights fand f ′ at time t. The separation of f and f ′ in the plane formedby their trajectories is ensured if for any time t, Dff ′(t) ≥ N ,where N is the horizontal separation norm. In the current ATMparadigm, flights follow predetermined routes that generallyoverlap only a finite number of times unless aircraft share acommon route. The latter scenario is omitted in this study, andwe focus on the former configuration in which most potentialconflicts arise. In this context, aircraft separation needs onlyto be monitored at intersection points, and it is well knownthat a local separation condition can be derived from aircraftspatiotemporal trajectories [18], [25]. That is, it can be shownthat aircraft separation at i is ensured if and only if∣∣tif − tif
∣∣ ≥ Γi(vif , v
if ′)
(5)
where Γi is a function of the aircraft speeds, the separationnorm, and the angle between aircraft trajectories θ, defined by
Γi(vif , v
if ′)=
N
√(vif
)2
− 2 cos θvifvif ′ +
(vif ′
)2
vifvif ′ | sin θ|
. (6)
Rey et al. [8] showed that Γi(vif , vif ′) is a nonconvex function
with respect to variables vif and introduced a linear approxima-tion Λi
f (tif ) of Γi(vif , v
if ′) using the change of variables defined
by (1).1 More precisely, we have
Λif (t
if ) ≡
(tif − ti−f
)Gi
ff ′ (7)
where Giff ′ is a constant depending on the geometry of the
potential conflict, i.e., the distance to the intersection point, theangle between aircraft trajectories, and bounds on the relative
1An appreciation of the tightness of this approximation is provided in theAppendix for different aircraft configuration.
speeds of flights. Both Λif (t
if ) and Λi
f ′(tif ′) are upper boundson Γi(vif , v
if ′); hence, aircraft separation at i is ensured if∣∣tif − tif ′
∣∣ ≥ min{Λif
(tif),Λi
f ′(tif ′
)}(8)
and the conflict load of a pair of flights is defined as
Ωi(tif , t
if ′)≡(min
{Λif
(tif),Λi
f ′(tif ′
)}−∣∣tif−tif ′
∣∣)+ (9)
where (X)+ ≡ {maxX, 0}. If the conflict load of a pairwiseconflict is reduced to zero, then the conflict is resolved. Thiscan be captured by a decision variable ηiff ′ defined as
ηiff ′ ≡{
1, if Ωi(tif , t
if ′
)= 0
0, otherwise∀ (f, f ′, i) ∈ CP (10)
where CP is the set of potential conflicts. The number ofpotential conflicts resolved can then be maximized usingModel 1. At the optimum, constraint (13) enforces that ηiff ′ isequal to one only if Ωi(tif , t
if ′)/M = 0, where M is a constant
that is significantly greater than Ωi(tif , tif ′).
Model 1—Conflict Resolution (S1):
max∑
(f,f ′,i)∈CP
ηiff ′ (11)
subject to :
∀f ∈ F , i ∈ P(f) : tif ≤ tif ≤ tif (12)
∀(f, f ′, i) ∈ CP : ηiff ′ ≤ 1 − Ωi(tif , t
if ′)/M (13)
ηiff ′ ∈ {0, 1}. (14)
Model 1, however, does not attempt to further optimizeaircraft trajectories. In particular, many pairs of crossing timesmay resolve a conflict, and we propose to select the pair that isthe closest to a fair solution with regard to the cost induced forboth aircraft by the speed adjustments. We develop this step ina second optimization stage designed to control the repartitionof the marginal costs induced by the resolution of potentialconflicts.
C. Second Stage: Deviation from Total Equity
Conflict resolution in ATM can be formulated as a resourceallocation problem where the objective is to resolve conflictsin the most equitable way possible. From the perspective ofairlines, collision avoidance procedures may increase DOC asthey generally induce flight delay and extra fuel consumption.This can be captured by the notion of cost index (CI), whichis defined as the ratio between the cost of time and the cost offuel. That is, the CI of f , i.e., CI(f), is defined as
CI(f) ≡ ctime(f)
cfuel(f). (15)
If the cost of fuel cfuel(f) is significantly greater than thecost of time ctime(f), the CI is set close to zero, and the aircraftshould fly at its fuel-optimal speed. Conversely, if the cost oftime is significantly greater than the cost of fuel, the CI may beset to a high value [26]. Krozel et al. [3] defines the cost inducedby the resolution of a conflict as a combination of the cost of

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
time and the cost of fuel. Let c(f, f ′, i) be the cost induced byconflict (f, f ′, i) for f , i.e.,
c(f, f ′, i) = ctime(f, f′, i) + cfuel(f, f
′, i). (16)
ctime(f, f′, i) is the cost associated to the incremental time
induced by the resolution of the conflict; thus, it can beexpressed as a function of the actual crossing time, i.e., tif ,the nominal—if no conflict-resolution maneuver is engaged—crossing time of f at i, i.e., T i,0
f ; and the value of time (VOT)of flight f , i.e., VOT(f). Thus
ctime(f, f′, i) =
(tif − T i,0
f
)VOT(f). (17)
cfuel(f, f′, i) is the cost associated to the extra fuel con-
sumption required by the trajectory modification. While thiscost depends on the aircraft speed, altitude, and fuel burn rate,we use the CI of flights to approximate the marginal fuel costinduced by the resolution of the conflict. Observe that thisassumption is reasonable in the context of speed-control-basedconflict-resolution methods as aircraft are assumed to remainat the same altitude. Furthermore, we assume that for everyflight f , (15) is locally verified during the conflict resolution,that is, cfuel(f, f ′, i) is equal to ctime(f, f
′, i) times the CI. Themarginal cost induced by the resolution of a conflict can thenbe expressed as
c(f, f ′, i) = ctime(f, f′, i) (1 + 1/CI(f)) (18)
=(tif − T i,0
f
)(1 + 1/CI(f))VOT(f). (19)
From the perspective of airlines, conflict-resolution pro-cedures generally contribute to increasing DOC and do notattempt to fairly distribute the marginal costs among flights.We propose to introduce the notion of equity in air conflictresolution procedures by reducing the discrepancy betweenthe marginal costs induced by the trajectory modifications.Bertsimas et al. [12] define total equity in a central decision-making game as the resource allocation scheme where everyplayer derives exactly the same utility. We adapt this definitionto pairwise air conflicts.
Definition 1 (Total Equity in Pairwise Air Conflicts): Let(f, f ′, i) be a pairwise conflict. If the marginal costs inducedby the resolution of the conflict are equal, that is, c(f, f ′, i) =c(f ′, f, i), then the conflict is said to be resolved in total equity.
Let A(f) = (1 + 1/CI(f))VOT(f) be the marginal cost cor-responding to an incremental unit of time for f . An equitablestrategy for conflict (f, f ′, i) is achieved if
c(f, f ′, i) = c(f ′, f, i) (20)
⇔(tif − T i,0
f
)A(f) =
(tif ′ − T i,0
f ′
)A(f ′) (21)
which leads to the following proposition.Proposition 1: Let f and f ′ be two flights involved in a
potential conflict at i. If there exists a pair of crossing times(ti,�f , ti,�f ′ ) such that Ωi(ti,�f , ti,�f ′ ) = 0 and(
tifo− T i,0f
)A(f) =
(ti,�f ′ − T i,0
f ′
)A(f ′). (22)
Then, the conflict is resolved in total equity, and (ti,�f , ti,�f ′ ) isan equitable solution.
Fig. 1. Feasible solution space and equity isoline.
If an equitable solution is an ideal pair of crossing timesto resolve a potential conflict, its existence is not guaranteed,even if the conflict can be resolved. Fig. 1 depicts the feasiblesolution space of a pairwise conflict when aircraft separation isenforced using the piecewise linear constraint, i.e.,∣∣tif − tif ′
∣∣ ≥ min{Λif
(tif),Λi
f ′(tif ′
)}. (23)
The absolute value in constraint (23) potentially defines anonconvex feasible solution space (shaded polygons). The setof equitable solutions is determined by the intersection ofthe feasible solution space with the equity isoline defined by(21), which represents the set of fair resource allocation for apairwise conflict. Let ti,1f be the crossing time of flight f at pointi obtained by solving Model 1. We define the set CR ⊆ CP as
CR ≡{(f, f ′, i) ∈ CP : Ωi
(ti,1f , ti,1f ′
)= 0
}. (24)
CR is the set of potential conflicts resolved by Model 1;hence, for each element in CR, there exists a pair of crossingtimes such that aircraft separation is ensured. Let εi be thepiecewise linear function defined as
εi(tif , t
if ′)≡
∣∣∣(tif − T i,0f
)A(f)− (tif ′ − T i,0
f ′ )A(f′)∣∣∣ . (25)
εi(tif , tif ′) represents the deviation from total equity of the
pairwise conflict (f, f ′, i). In a second optimization stage, weminimize the sum of the deviations from total equity overall the potential conflicts resolved in the first stage subjectto the separation constraint (23). This stage is represented byModel 2. At this stage, every potential conflict in CR can beresolved with the separation constraint without risking to yieldan infeasible solution. This is possible because the existence ofsuch a solution has been proven at the previous stage.
Model 2—Deviation From Total Equity (S2):
min∑
(f,f ′,i)∈CR
εi(tif , t
if ′)
(26)
subject to
∀f ∈ F , i ∈ P(f) : tif ≤ tif ≤ tif (27)
∀(f, f ′, i) ∈ CR :∣∣tif − tif ′
∣∣≥min{Λif ,(tif),Λi
f ′ ,(tif ′
)}.
(28)
Model 2 attempts to equitably reallocate the deconflictionressources to provide fair trajectories with regard to airlines

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
REY et al.: EQUITY-ORIENTED AIRCRAFT COLLISION AVOIDANCE MODEL 5
DOC. However, this second stage does not further optimize thecrossing times of flights. As such, any pair of crossing times onthe equity isoline could be potentially used to equitably resolvea conflict. Alternatively, little is done to improve the situation offlights involved in previously unresolved conflicts. As most ofairlines DOC are induced by flight delay, we introduce a thirdoptimization stage to minimize the total delay in the systemwhile conserving the same level of equity achieved after thesecond stage.
D. Third Stage: Minimization of the Total Delay
The total delay in the system is the sum of the incrementaltime induced by all trajectory adjustments and can be mini-mized using the objective function
min∑f∈F
∑i∈P(f)
(tif − T i,0
f
)+
. (29)
Let ti,2f be the crossing time of f at i obtained by solvingModel 2; we define E2 as the achieved deviation from totalequity
E2 ≡∑
(f,f ′,i)∈CR
εi(ti,2f , ti,2f ′
)(30)
and enforce the final deviation from total equity to be at mostE2; Model 3 summarizes this stage.
Model 3—Total Delay Reduction (S3):
min∑f∈F
∑i∈P(f)
(tif − T i,0
f
)+
(31)
subject to∑
(f,f ′,i)∈CR
εi(tif , t
if ′)≤ E2 (32)
∀f ∈ F , i ∈ P(f) : tif ≤ tif ≤ tif (33)
∀(f, f ′, i) ∈ CR :∣∣tif − tif ′
∣∣≥min{Λif
(tif),Λi
f ′(tif ′
)}.
(34)
The ECR model combines Models 1, 2, and 3 to first identifya set of conflicts that can be resolved altogether before reducingthe deviation from total equity and eventually minimizing thetotal delay in the system; the coordination of the differentoptimization stages are summarized in Algorithm 1.
Algorithm 1 ECR Algorithm
Require: A set of potential conflicts CP , speed regulationbounds, CI and VOT of flights
Ensure: A set of fair RTA deadlines for conflict resolution1: Let CR ← ∅, E2 ← ∞2: Solve Model 13: ∀(f, f ′, i) ∈ CP if Ωi(ti,1f , ti,1f ′ ) = 0 then4: CR ← CR ∪ {(f, f ′, i)}5: Solve Model 26: Let E2 ←
∑(f,f ′,i)∈CR εi(ti,2f , ti,2f ′ )
7: Solve Model 3
Fig. 2. Typical evolution of the specific range (SR) in nautical miles (NM)per kilogram of fuel according to the cruise speed in NM per hour (1 NM =1852 m).
While all stages of the ECR model are formulated usingnonlinear mathematical operators, they can be reformulatedusing MILP by introducing binary and semicontinuous decisionvariables. For clarity, these reformulations are detailed in theAppendix. In the following section, we present the evaluationframework developed to measure the performance of the ECRmodel.
IV. SIMULATION FRAMEWORK
We first describe the speed control framework proposed toimplement the ECR model. We then present the conflict gener-ator developed to simulate traffic scenarios of variable densityand introduce two conflict-resolution benchmark problems usedto evaluate the performance of the model.
A. Specific Range and Subliminal Control
It is widely known that most aircraft operate at near-maximalspeeds during their trip, which is mainly due to high cost oftime with regard to fuel expenditures [27]–[29]. It is thereforemore convenient for airlines to have their aircraft fly as fast aspossible rather than to fly at a fuel-optimal speed thus reducingtheir specific range. The specific range of an aircraft is definedas the number of nautical miles it can fly using a unit of fuel anddepends mainly on its cruise speed, its altitude, and its mass. Inthis paper, we neglect the impact of the mass and the altitude ofthe aircraft by assuming an average load and a constant altitudeduring the cruise stage.
Fig. 2 shows the evolution of the specific range of a genericcommercial aircraft according to its cruise speed. Delgado andPratts [30] suggested a concave curve of the specific range andobserved that the nominal speed of flights is generally greaterthan their fuel-optimal speed. This creates the possibility ofderiving fuel-efficient speed regulation schemes. Let SRf bethe specific range of f , and let V 0
f be the nominal speed of flightf , which is assumed to be greater than its fuel-optimal speedV fuelf . Under these assumptions, there exists a fuel-equivalent
speed V eqf (see Fig. 2) such that
SRf
(V eqf
)= SRf
(V 0f
). (35)
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
Any speed adjustment occurring within the range Ifuel(f) =[V eq
f , V 0f ] is fuel equivalent or better with regard to the initial
strategy chosen by airlines. Delgado and Pratts [30] also high-light that the size of interval Ifuel(f) is typically of the sameorder of magnitude than the speed modulation ranges testedin the ERASMUS project. That is, the authors show that foran Airbus A320 on a standard European route, a CI of 60(respectively, 25) allows the nominal speed of the aircraft tobe reduced by 8% (respectively, 6%). During field experimentsperformed within the ERASMUS project, Drogoul et al. [7]observed that speed modulations ranging from −12% to +6%of aircraft nominal speed were almost imperceptible by ATCs.This suggests that aircraft-specific speed regulation ranges canbe used to resolve conflicts without penalizing airlines andremaining imperceptible by ATCs.
To verify this hypothesis, we consider two speed regulationschemes: a weak regulation scheme, where aircraft can reducetheir nominal speed by up to −6%, and a strong regulationscheme with a maximal reduction of −12%. Recall that weonly consider speed reductions. Let [m, 0] be the subliminalspeed modulation interval, and let V 0
f be the nominal cruisespeed; the subliminal speed range for flight f is Isub(f) =[V 0
f (1 +m), V 0f ], and we use
Ispeed(f) = Ifuel(f) ∩ Isub(f) (36)
as the speed regulation interval for f .
B. Economic Data
To reproduce realistic economic scenarios where airlineshave different VOT and flights have heterogeneous CI, we use afleet of aircraft presented in [31]. A total of 16 different aircraftfrom four airliners are represented, each of which possessesa specific maximum value for its CI, which is denoted byCImax. The cost of time is determined as the sum of the hourlymaintenance cost and the hourly crew cost, and we assume thata maximum CI is selected for any VOT beyond 30 US$/min[32]. Furthermore, we assume a fixed cost of fuel; hence, theCI of a flight is a linear function of its VOT. The fuel-equivalentspeed of each flight is determined according to its CI: If a flighthas a low (respectively, high) CI with respect to other CI fromthe same aircraft family, then a minimal (respectively, maximal)speed reduction is allowed. Delgado and Pratts [30] suggest thataircraft nominal speeds may be reduced by 15% without anyextra fuel consumption; we use this value as the maximum fuel-equivalent speed reduction range. The fuel-equivalent speed off is then determined by
V eqf = V 0
f
(1 − 0.15
CI(f)CImax(f)
). (37)
C. Conflict Generation and Detection
We use an air traffic conflict generator to simulate conflictsin the plane. This approach has been widely used in the ATMcommunity to test the performance of CD&R algorithms. Twobenchmark problems are used to evaluate the performance of
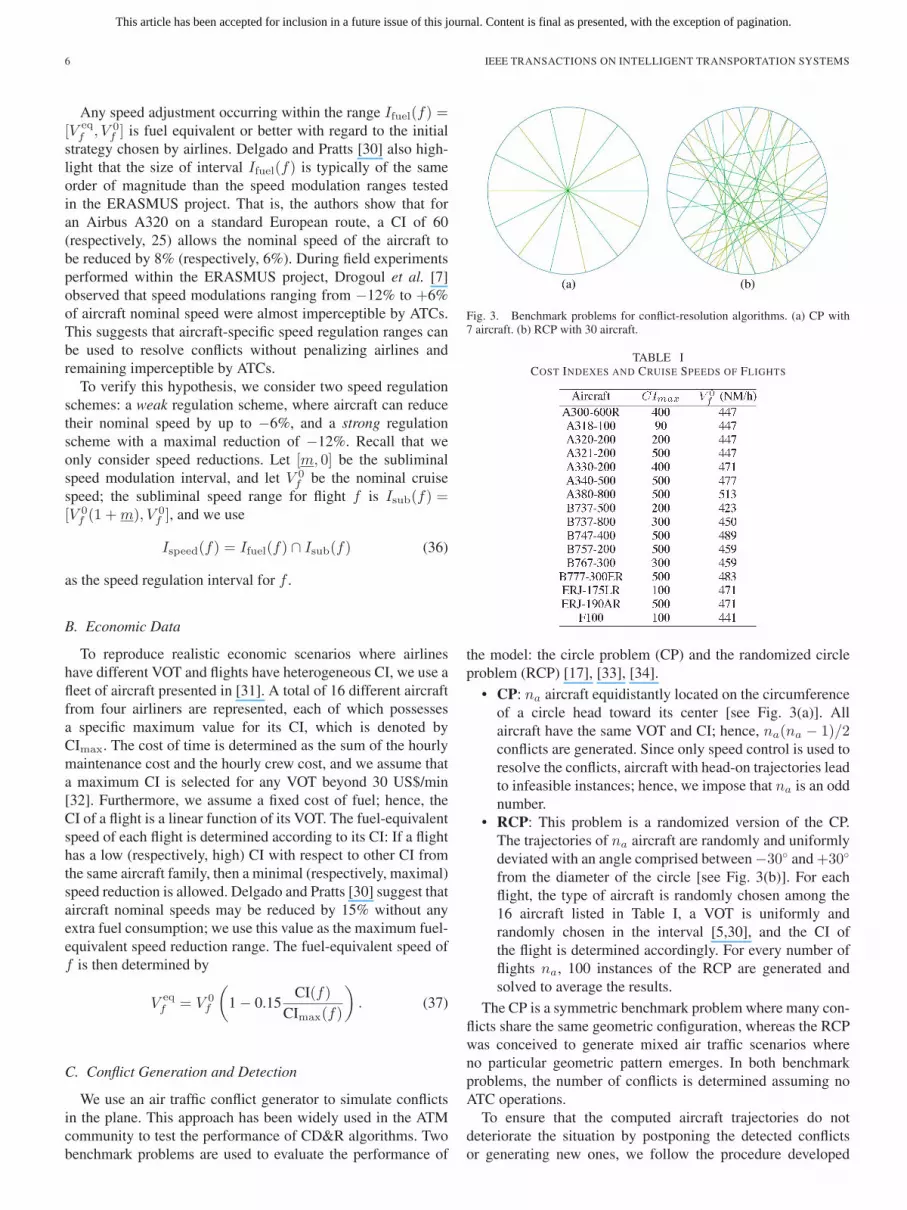
Fig. 3. Benchmark problems for conflict-resolution algorithms. (a) CP with7 aircraft. (b) RCP with 30 aircraft.
TABLE ICOST INDEXES AND CRUISE SPEEDS OF FLIGHTS
the model: the circle problem (CP) and the randomized circleproblem (RCP) [17], [33], [34].
• CP: na aircraft equidistantly located on the circumferenceof a circle head toward its center [see Fig. 3(a)]. Allaircraft have the same VOT and CI; hence, na(na − 1)/2conflicts are generated. Since only speed control is used toresolve the conflicts, aircraft with head-on trajectories leadto infeasible instances; hence, we impose that na is an oddnumber.
• RCP: This problem is a randomized version of the CP.The trajectories of na aircraft are randomly and uniformlydeviated with an angle comprised between −30◦ and +30◦
from the diameter of the circle [see Fig. 3(b)]. For eachflight, the type of aircraft is randomly chosen among the16 aircraft listed in Table I, a VOT is uniformly andrandomly chosen in the interval [5,30], and the CI ofthe flight is determined accordingly. For every number offlights na, 100 instances of the RCP are generated andsolved to average the results.
The CP is a symmetric benchmark problem where many con-flicts share the same geometric configuration, whereas the RCPwas conceived to generate mixed air traffic scenarios whereno particular geometric pattern emerges. In both benchmarkproblems, the number of conflicts is determined assuming noATC operations.
To ensure that the computed aircraft trajectories do notdeteriorate the situation by postponing the detected conflictsor generating new ones, we follow the procedure developed
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
REY et al.: EQUITY-ORIENTED AIRCRAFT COLLISION AVOIDANCE MODEL 7
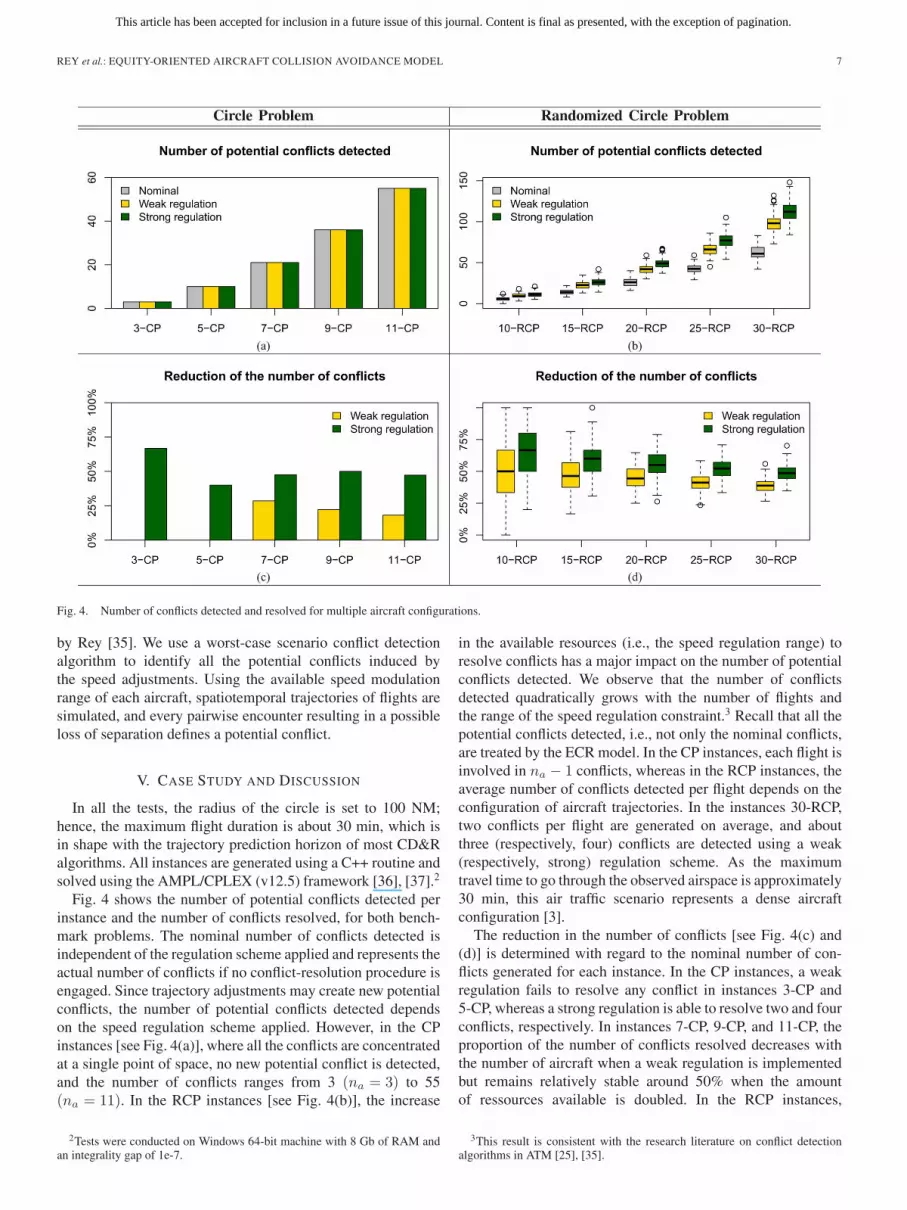
Fig. 4. Number of conflicts detected and resolved for multiple aircraft configurations.
by Rey [35]. We use a worst-case scenario conflict detectionalgorithm to identify all the potential conflicts induced bythe speed adjustments. Using the available speed modulationrange of each aircraft, spatiotemporal trajectories of flights aresimulated, and every pairwise encounter resulting in a possibleloss of separation defines a potential conflict.
V. CASE STUDY AND DISCUSSION
In all the tests, the radius of the circle is set to 100 NM;hence, the maximum flight duration is about 30 min, which isin shape with the trajectory prediction horizon of most CD&Ralgorithms. All instances are generated using a C++ routine andsolved using the AMPL/CPLEX (v12.5) framework [36], [37].2
Fig. 4 shows the number of potential conflicts detected perinstance and the number of conflicts resolved, for both bench-mark problems. The nominal number of conflicts detected isindependent of the regulation scheme applied and represents theactual number of conflicts if no conflict-resolution procedure isengaged. Since trajectory adjustments may create new potentialconflicts, the number of potential conflicts detected dependson the speed regulation scheme applied. However, in the CPinstances [see Fig. 4(a)], where all the conflicts are concentratedat a single point of space, no new potential conflict is detected,and the number of conflicts ranges from 3 (na = 3) to 55(na = 11). In the RCP instances [see Fig. 4(b)], the increase
2Tests were conducted on Windows 64-bit machine with 8 Gb of RAM andan integrality gap of 1e-7.
in the available resources (i.e., the speed regulation range) toresolve conflicts has a major impact on the number of potentialconflicts detected. We observe that the number of conflictsdetected quadratically grows with the number of flights andthe range of the speed regulation constraint.3 Recall that all thepotential conflicts detected, i.e., not only the nominal conflicts,are treated by the ECR model. In the CP instances, each flight isinvolved in na − 1 conflicts, whereas in the RCP instances, theaverage number of conflicts detected per flight depends on theconfiguration of aircraft trajectories. In the instances 30-RCP,two conflicts per flight are generated on average, and aboutthree (respectively, four) conflicts are detected using a weak(respectively, strong) regulation scheme. As the maximumtravel time to go through the observed airspace is approximately30 min, this air traffic scenario represents a dense aircraftconfiguration [3].
The reduction in the number of conflicts [see Fig. 4(c) and(d)] is determined with regard to the nominal number of con-flicts generated for each instance. In the CP instances, a weakregulation fails to resolve any conflict in instances 3-CP and5-CP, whereas a strong regulation is able to resolve two and fourconflicts, respectively. In instances 7-CP, 9-CP, and 11-CP, theproportion of the number of conflicts resolved decreases withthe number of aircraft when a weak regulation is implementedbut remains relatively stable around 50% when the amountof ressources available is doubled. In the RCP instances,
3This result is consistent with the research literature on conflict detectionalgorithms in ATM [25], [35].
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
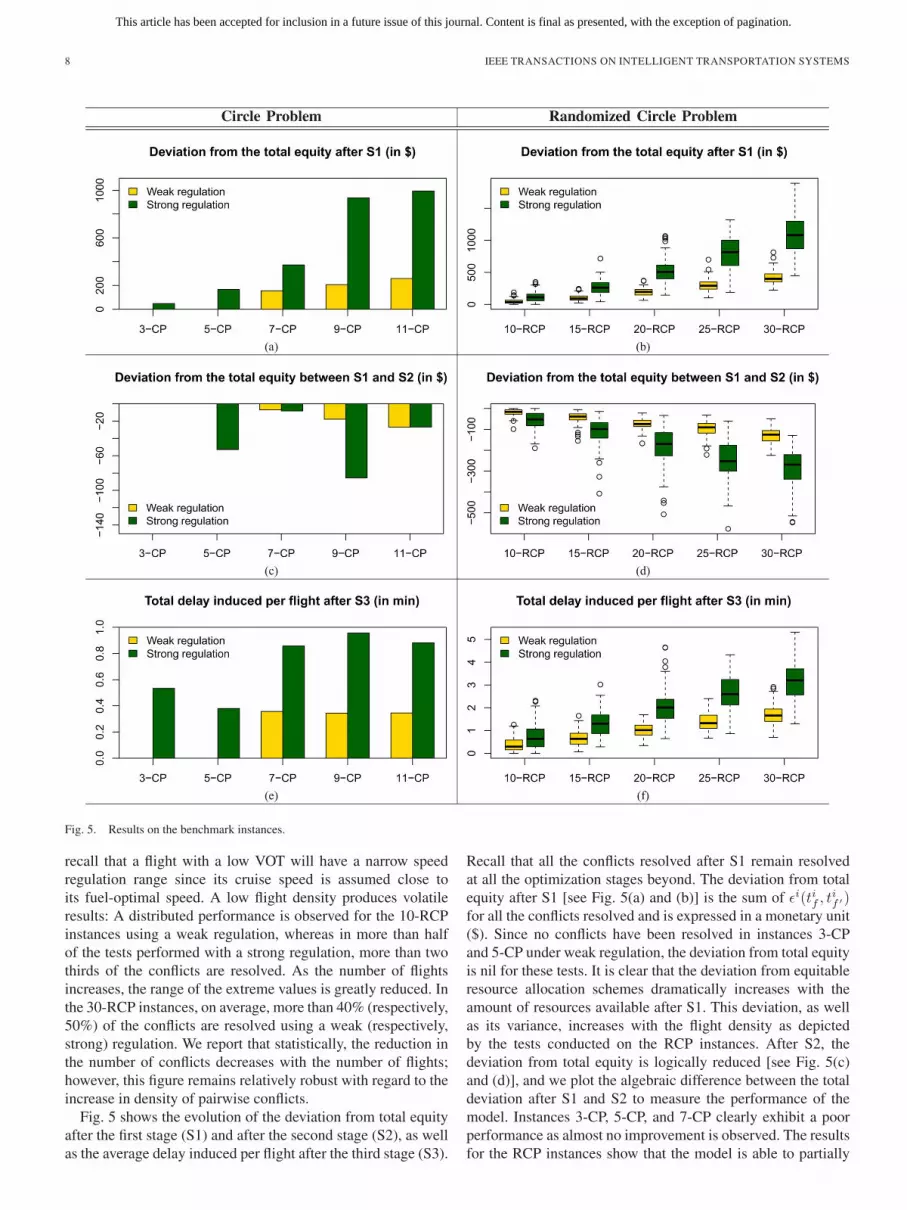
Fig. 5. Results on the benchmark instances.
recall that a flight with a low VOT will have a narrow speedregulation range since its cruise speed is assumed close toits fuel-optimal speed. A low flight density produces volatileresults: A distributed performance is observed for the 10-RCPinstances using a weak regulation, whereas in more than halfof the tests performed with a strong regulation, more than twothirds of the conflicts are resolved. As the number of flightsincreases, the range of the extreme values is greatly reduced. Inthe 30-RCP instances, on average, more than 40% (respectively,50%) of the conflicts are resolved using a weak (respectively,strong) regulation. We report that statistically, the reduction inthe number of conflicts decreases with the number of flights;however, this figure remains relatively robust with regard to theincrease in density of pairwise conflicts.
Fig. 5 shows the evolution of the deviation from total equityafter the first stage (S1) and after the second stage (S2), as wellas the average delay induced per flight after the third stage (S3).
Recall that all the conflicts resolved after S1 remain resolvedat all the optimization stages beyond. The deviation from totalequity after S1 [see Fig. 5(a) and (b)] is the sum of εi(tif , t
if ′)
for all the conflicts resolved and is expressed in a monetary unit($). Since no conflicts have been resolved in instances 3-CPand 5-CP under weak regulation, the deviation from total equityis nil for these tests. It is clear that the deviation from equitableresource allocation schemes dramatically increases with theamount of resources available after S1. This deviation, as wellas its variance, increases with the flight density as depictedby the tests conducted on the RCP instances. After S2, thedeviation from total equity is logically reduced [see Fig. 5(c)and (d)], and we plot the algebraic difference between the totaldeviation after S1 and S2 to measure the performance of themodel. Instances 3-CP, 5-CP, and 7-CP clearly exhibit a poorperformance as almost no improvement is observed. The resultsfor the RCP instances show that the model is able to partially
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
REY et al.: EQUITY-ORIENTED AIRCRAFT COLLISION AVOIDANCE MODEL 9
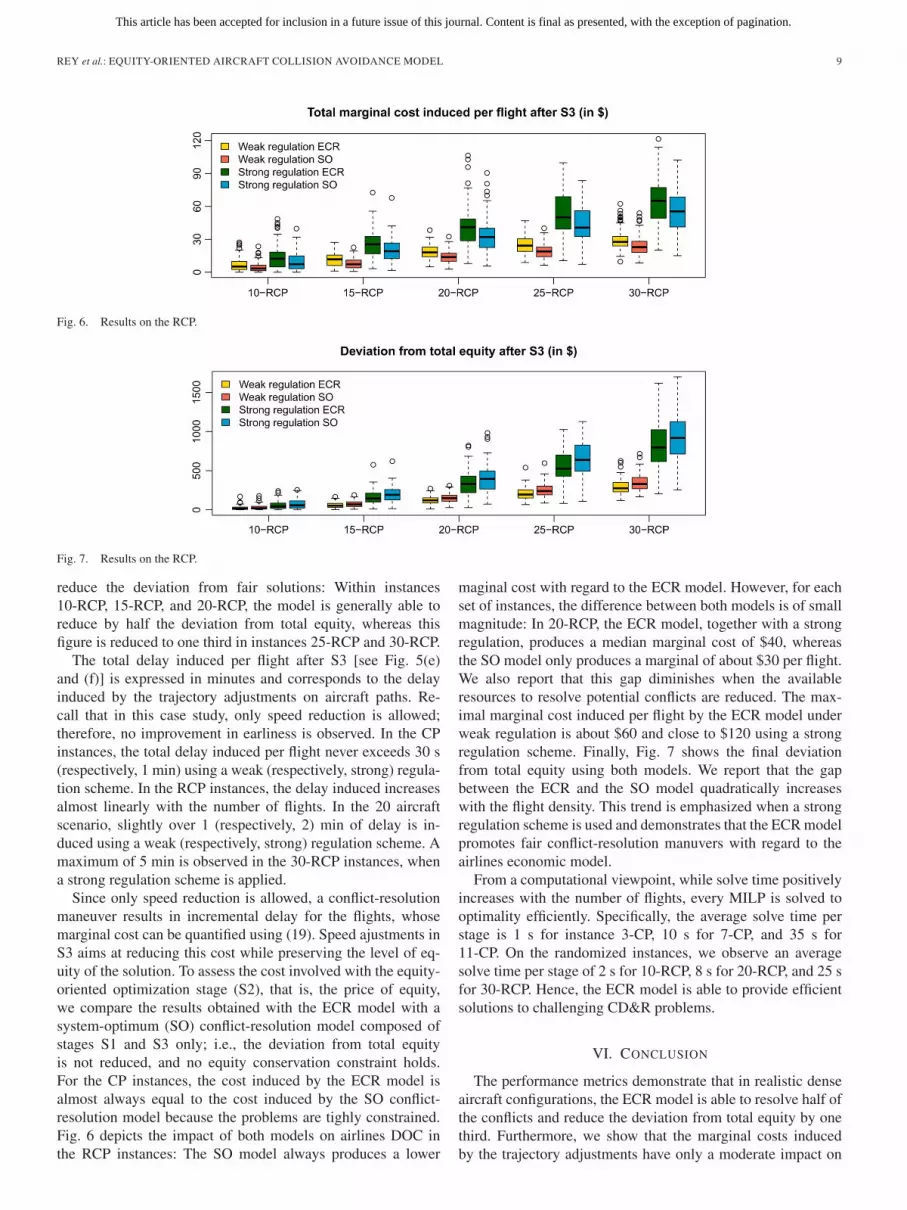
Fig. 6. Results on the RCP.
Fig. 7. Results on the RCP.
reduce the deviation from fair solutions: Within instances10-RCP, 15-RCP, and 20-RCP, the model is generally able toreduce by half the deviation from total equity, whereas thisfigure is reduced to one third in instances 25-RCP and 30-RCP.
The total delay induced per flight after S3 [see Fig. 5(e)and (f)] is expressed in minutes and corresponds to the delayinduced by the trajectory adjustments on aircraft paths. Re-call that in this case study, only speed reduction is allowed;therefore, no improvement in earliness is observed. In the CPinstances, the total delay induced per flight never exceeds 30 s(respectively, 1 min) using a weak (respectively, strong) regula-tion scheme. In the RCP instances, the delay induced increasesalmost linearly with the number of flights. In the 20 aircraftscenario, slightly over 1 (respectively, 2) min of delay is in-duced using a weak (respectively, strong) regulation scheme. Amaximum of 5 min is observed in the 30-RCP instances, whena strong regulation scheme is applied.
Since only speed reduction is allowed, a conflict-resolutionmaneuver results in incremental delay for the flights, whosemarginal cost can be quantified using (19). Speed ajustments inS3 aims at reducing this cost while preserving the level of eq-uity of the solution. To assess the cost involved with the equity-oriented optimization stage (S2), that is, the price of equity,we compare the results obtained with the ECR model with asystem-optimum (SO) conflict-resolution model composed ofstages S1 and S3 only; i.e., the deviation from total equityis not reduced, and no equity conservation constraint holds.For the CP instances, the cost induced by the ECR model isalmost always equal to the cost induced by the SO conflict-resolution model because the problems are tighly constrained.Fig. 6 depicts the impact of both models on airlines DOC inthe RCP instances: The SO model always produces a lower
maginal cost with regard to the ECR model. However, for eachset of instances, the difference between both models is of smallmagnitude: In 20-RCP, the ECR model, together with a strongregulation, produces a median marginal cost of $40, whereasthe SO model only produces a marginal of about $30 per flight.We also report that this gap diminishes when the availableresources to resolve potential conflicts are reduced. The max-imal marginal cost induced per flight by the ECR model underweak regulation is about $60 and close to $120 using a strongregulation scheme. Finally, Fig. 7 shows the final deviationfrom total equity using both models. We report that the gapbetween the ECR and the SO model quadratically increaseswith the flight density. This trend is emphasized when a strongregulation scheme is used and demonstrates that the ECR modelpromotes fair conflict-resolution manuvers with regard to theairlines economic model.
From a computational viewpoint, while solve time positivelyincreases with the number of flights, every MILP is solved tooptimality efficiently. Specifically, the average solve time perstage is 1 s for instance 3-CP, 10 s for 7-CP, and 35 s for11-CP. On the randomized instances, we observe an averagesolve time per stage of 2 s for 10-RCP, 8 s for 20-RCP, and 25 sfor 30-RCP. Hence, the ECR model is able to provide efficientsolutions to challenging CD&R problems.
VI. CONCLUSION
The performance metrics demonstrate that in realistic denseaircraft configurations, the ECR model is able to resolve half ofthe conflicts and reduce the deviation from total equity by onethird. Furthermore, we show that the marginal costs inducedby the trajectory adjustments have only a moderate impact on

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
airlines DOC and that the price of fairness in speed-control-based conflict-resolution strategies is not significantly higherthan the system-optimum cost. The tests conducted stress thatthe ECR model is able to provide competitive results usinga fuel-equivalent regulation scheme as well as working indelivering a lucky traffic to ATCs through subliminal speedcontrol. Among the perspectives of this work, validation of themethodology using real air traffic data is a priority. A thorougheconomic analysis of the impact of other conflict-resolutionstrategies, i.e., heading change and flight level reassignment,on airlines DOC is also necessary to accurately estimate thepotential benefits of this traffic regulation strategy. Indeed, themarginal costs induced by such conflict-resolution strategiesare, on average, likely to be greater than the ones induced byspeed-control-based approaches, even if no fair resource alloca-tion scheme is applied. In summary, the ECR model constitutesan innovative paradigm to resolve air conflicts and potentiallyreduce controller workload as well as to strategically anticipatecongestion episodes in the perspective of airlines. The devel-opment of equity-oriented resource allocation schemes withregard to airlines DOC is an important step toward acceptabilityof such policies by the airline industry and, therefore, wouldfast-track the system integration of conflict-resolution strategiesin ATM.
APPENDIX AREFORMULATIONS OF MODELS 1, 2, AND 3
The ECR model can be formulated using MILP by introduc-ing auxiliary decision variables and constraints. We linearizeconstraint (13) by introducing a variable xi
ff ′ defined as
xiff ′ ≡
{1, if Λi
f
(tif
)≤ Λi
f ′
(tif ′
)0, otherwise.
(38)(39)
Function Ωi(tif , tif ′) can then be replaced with variable
ωiff ′ ∈ R by including the following constraints:
ηiff ′ ≤ 1 − ωiff ′/M (40)
ωiff ′ ≥
(tif − ti−f
)xiff ′Gi
ff ′ −Δtiff ′ (41)
ωiff ′ ≥
(tif ′−ti−f ′
)(1−xi
ff ′)Gif ′f−Δtiff ′ (42)
xiff ′M ′ ≤
(tif ′−ti−f ′
)Gi
f ′f−(tif−ti−f
)Gi
ff ′ (43)
(1 − xi
ff ′)M ′ ≤
(tif−ti−f
)Gi
ff ′−(tif ′−ti−f ′
)Gi
f ′f (44)
where M ′ is a large constant, and Δtiff ′ is a continous variabledefined as Δtiff ′ ≡ |tif − tif ′ |. At the optimum, either con-straint (41) or constraint (42) is binding, and the upper boundon the conflict load of pairwise conflict is correclty defined.Constraints (43) and (44) define variable xi
ff ′ using a big Mexpression. The crossing time difference Δtiff ′ can be linearlyexpressed by introducing a variable yiff ′ defined as
yiff ′ ≡{
1, if tif ≤ tif ′
0, otherwise(45)(46)
and the set of constraints
Δtiff ′ ≤ tif − tif ′ + 2yiff ′
(tif ′ − tif
)(47)
Δtiff ′ ≤ tif ′ − tif + 2(1− yiff ′
) (tif − tif ′
)(48)
Δtiff ′ ≥ tif − tif ′ (49)
Δtiff ′ ≥ tif ′ − tif (50)
tif ′ ≤ tif + yiff ′
(tif ′ − tif
)(51)
tif ≤ tif ′ +(1 − yiff ′
) (tif − tif ′
). (52)
Constraints (47)–(50) ensure that Δtiff ′ is correctly defined,and constraints (51) and (52) define variable yiff ′ . Model 4summarizes the reformulations.
Model 4—First Stage (S1), MILP:
max∑
(f,f ′,i)∈CP
ηiff ′ (53)
subject to :
∀f ∈ F , i ∈ P(f) :
tif ≤ tif ≤ tif (54)
∀(f, f ′, i) ∈ CP :
ηiff ′ ≤ 1 − ωiff ′/M (55)
ωiff ′ ≥
(tif − ti−f
)xiff ′Gi
ff ′ −Δtiff ′ (56)
ωiff ′ ≥
(tif ′−ti−f ′
) (1−xi
ff ′)Gi
f ′f −Δtiff ′ (57)
xiff ′M ′ ≤
(tif ′−ti−f ′
)Gi
f ′f −(tif − ti−f
)Gi
ff ′ (58)(1 − xi
ff ′)M ′ ≤
(tif−ti−f
)Gi
ff ′−(tif ′ − ti−f ′
)Gi
f ′f (59)
Δtiff ′ ≤ tif − tif ′ + 2yiff ′
(tif ′ − tif
)(60)
Δtiff ′ ≤ tif ′ − tif + 2(1 − yiff ′
) (tif − tif ′
)(61)
Δtiff ′ ≥ tif − tif ′ (62)
Δtiff ′ ≥ tif ′ − tif (63)
tif ′ ≤ tif + yiff ′
(tif ′ − tif
)(64)
tif ≤ tif ′ +(1 − yiff ′
) (tif − tif ′
)(65)
ηiff ′ , xiff ′ , yiff ′ ∈ {0, 1}, tif , t
if , t
if , ω
iff ′ ,Δtiff ′ ∈ R. (66)
Model 4 is an exact reformulation of Model 1. The remainingnonlinear forms in constraints (56), (57), (60), (61), (64), and(65) can be linearized as follows. Let b be a binary decisionvariable and c be a bounded continuous decision variable c ∈[cl, cu]. Let decision variable β ∈ R be defined as
β ≡ bc. (67)
The products of the form bc can then be replaced by variableβ and the following set of linear constraints appended to themodel
β ≤ c− (1 − b)cl, β ≤ bcl (68)
β ≥ c− (1 − b)cu, β ≥ bcu. (69)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
REY et al.: EQUITY-ORIENTED AIRCRAFT COLLISION AVOIDANCE MODEL 11
Fig. 8. Tightness of the upper bound (in dark grey/pink) on the air-craft separation function Γi(vif , v
if ′ ) (in light grey/blue). (a), (b) θ = π/4.
(c), (d) θ = π/2. (e), (f) θ = 3π/4.
As variables tif , tif , and tif are bounded by the minimum and
maximum speed variations allowed for deconfliction, respec-tively, all nonlinear products can be linearized. The additionalconstraints in Models 2 and 3 can be reformulated using similartechniques. Function εi(tif , t
if ′) can be replaced with variable
eiff ′ ∈ R by introducing the objective function
min∑
(f,f ′,i)∈CR
eiff ′ (70)
and including the following linear constraints:
eiff ′ ≥(tif − T i,0
f
)A(f)−
(tif ′ − T i,0
f ′
)A(f ′) (71)
eiff ′ ≥(tif ′ − T i,0
f ′
)A(f ′)−
(tif − T i,0
f
)A(f). (72)
At the optimum, either constraint (71) or constraint (72) isbinding; therefore, eiff ′ is equal to the deviation from totalequity for conflict (f, f ′, i). To enforce separation for all thepotential conflicts resolved at the first stage, we substituteconstraints (56) and (57) in Model 4 by
Δtiff ′ ≥(tif − ti−f
)xiff ′Gi
ff ′ (73)
Δtiff ′ ≥(tif ′ − ti−f ′
) (1− xi
ff ′)Gi
f ′f (74)
and restrict the set of constraints to CR. Finally, Model 3 can bereformulated using the same set of constraints with the additionof the equity conservation constraint (30) and by replacing itsobjective function with (29).
APPENDIX BTIGHTNESS OF THE APPROXIMATION
Fig. 8 shows the behavior of cost functions (Γi(vif , vif ′)−
|tif − tif ′ |)+ and (min{Λif (t
if ),Λ
if ′(tif ′)} − |tif − tif ′ |)+ with
different trajectory angle and regulation resources.
REFERENCES
[1] “Performance review report,” Brussel, Belgium, Tech. Rep., 2011.[2] “FAA aerospace forecast,” Federal Aviation Administration, Washington,
DC, USA, Tech. Rep., 2012.[3] J. Krozel, M. Peters, K. D. Bilimoria, C. Lee, and J. S. Mitchell, “System
performance characteristics of centralized and decentralized air trafficseparation strategies,” in Proc. 4th USA/Eur. Air Traffic Manag. Res.Develop. Semin., Santa Fe, NM, USA, Dec. 2001, pp. 1–11.
[4] P. Averty, “Conflict perception by ATCs admits doubt but not inconsis-tency,” in Proc. 6th USA/Eur. Air Traffic Manag. Res. Develop. Semin.,Baltimore, MD, USA, 2005, pp. 1–11.
[5] A. Majumbar and W. Y. Ochieng, “Factors affecting air traffic controllerworkload,” Trans. Res. Rec., vol. 1788, pp. 58–69, 2002.
[6] J. Villiers, “Automatisation du contrôle de la circulation aérienne—Projet“ERASMUS” une voie originale pour mieux utilizer l’espace aérien,”Institut de Transport Aérien, Paris, France, Tech. Rep., 2004.
[7] F. Drogoul, P. Averty, and R. Weber, “Erasmus strategic deconfliction tobenefit SESAR,” in Proc. 8th USA/Eur. Air Traffic Manag. Res. Develop.Semin., Napa, CA, USA, Jun./Jul. 2009, pp. 1–10.
[8] D. Rey, C. Rapine, R. Fondacci, and N.-E. E. Faouzi, “Potential air con-flicts minimization through speed regulation,” Trans. Res. Rec.: J. Trans.Res. Board, vol. 2300, pp. 59–67, Nov. 2012.
[9] D. Bertsimas and S. S. Patterson, “The air traffic flow management prob-lem with enroute capacities,” Oper. Res., vol. 46, no. 3, pp. 406–422,Mar. 1998.
[10] G. Lulli and A. Odoni, “The European air traffic flow management prob-lem,” Transp. Sci., vol. 41, no. 4, pp. 431–443, Nov. 2007.
[11] D. Bertsimas, G. Lulli, and A. Odoni, “An integer optimization approachto large-scale ATFM,” Oper. Res., vol. 59, no. 1, pp. 211–227, Feb. 2011.
[12] D. Bertsimas, V. F. Farias, and N. Trichakis, “The price of fairness,” Oper.Res., vol. 59, no. 1, pp. 17–31, Jan./Feb. 2011.
[13] H. D. Sherali, R. W. Staats, and A. A. Trani, “An airspace planningand collaborative decision-making model: Part I probabilistic conflicts,workload, and equity considerations,” Transp. Sci., vol. 37, no. 4, pp. 434–456, Nov. 2003.
[14] H. D. Sherali, R. W. Staats, and A. A. Trani, “An airspace planning andcollaborative decision-making model: Part II cost model, data consid-erations, and computations,” Transp. Sci., vol. 40, no. 2, pp. 147–164,May 2006.
[15] J. K. Kuchar and L. C. Yang, “A review of conflict detection and reso-lution modeling method,” IEEE Trans. Intell. Transp. Syst., vol. 1, no. 4,pp. 179–189, Dec. 2000.
[16] K. Bilimoria, “A geometric optimization approach to aircraft conflictresolution,” in Proc. AIAA Guid., Navigat. Control Conf., Denver, CO,USA, Aug. 2000, pp. 14–17.
[17] L. Pallottino, E. Feron, and A. Bicchi, “Conflict resolution problems forair traffic management systems solved with mixed integer programming,”IEEE Trans. Intell. Transp. Syst., vol. 3, no. 1, pp. 3–11, Mar. 2002.
[18] S. Constans, B. Fontaine, and R. Fondacci, “Minimizing potential conflictquantity with speed control,” in Proc. 4th Eurocontrol Innov. Res. Work-shop Exhib., 2005, pp. 265–274.
[19] A. Vela et al., “Near real-time fuel-optimal en route conflict resolution,”IEEE Trans. Intell. Transp. Syst., vol. 11, no. 4, pp. 826–837, Dec. 2010.
[20] A. Vela, S. Solak, W. Singhose, and J.-P. Clarke, “A mixed integer pro-gram for flight level assignement and speed control for conflict resolu-tion,” in Proc. Joint 48th IEEE Conf. Decision Control 28th Chin. ControlConf., Shanghai, China, Dec. 2009, pp. 5219–5226.
[21] A. Alonso-Ayuso, L. F. Escudero, and F. Martin-Campo, “Collision avoid-ance in air traffic management: A mixed integer linear approach,” IEEETrans. Intell. Transp. Syst., vol. 12, no. 1, pp. 47–57, Mar. 2011.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
12 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
[22] S. Cafieri and N. Durand, “Aircraft deconfliction with speed regulation:New models from mixed-integer optimization,” J. Global Optim., vol. 58,no. 4, pp. 613–629, Apr. 2014.
[23] “FAA’s NextGen implementation plan,” Washington, DC, USA, Tech.Rep., 2011.
[24] “European air traffic management master plan,” Eur. ComissionEUROCONTROL, Brussel, Belgium, Tech. Rep., 2009.
[25] R. Haddad, J. Carlier, and A. Moukrim, “A new combinatorial approachfor coordinating aerial conflicts given uncertainties regarding aircraftspeeds,” Int. J. Prod. Econ., vol. 12, no. 1, pp. 226–235, Mar. 2007.
[26] “Fuel conservation strategies: Cost index explained,” AERO Quarterly,Chicago, IL, USA, Tech. Rep., 2007.
[27] F. L. Sellier, “Discrete real-time flight plan optimization,” M.S. thesis,Massachussets Institute of Technology, Campbridge, MA, USA, 1999.
[28] T. G. Reynolds et al., “Evaluation of potential near-term operationalchanges to mitigate environmental impacts of aviation,” in Proc. 27th Int.Congr. Aeronaut. Sci., 2010.
[29] J. Hansman, “Impact of NextGen integration on improving efficiencyand safety of operations,” in Proc. 91st Annu. Meet. Transp. Res. Board,Washington, DC, USA, 2012.
[30] L. Delgado and X. Prats, “Fuel consumption assessment for speed varia-tion concepts during the cruise phase,” in Proc. Conf. Air Traffic Manag.Econ., Belgrade, Serbia, 2009, pp. 1–12.
[31] A. Cook, G. Tanner, V. Williams, and G. Meise, “Dynamic cost indexing,”in Proc. 6th EUROCONTROL Innovative Res. Workshops Exhib., 2007.
[32] “Getting to Grips With the Cost Index,” Airbus, Blagnac Cedex, France,Tech. Rep., 1998.
[33] J. Omer and J.-L. Farges, “Automating air traffic control through nonlinearprogramming,” in Proc. 5th ICRAT , Berkeley, CA, USA, 2012, pp. 1–8.
[34] C. Vanaret, D. Gianazza, N. Durand, and J.-B. Gotteland, “Benchmarkingconflict resolution algorithms,” in Proc. 5th ICRAT , Berkeley, CA, USA,May 2012, pp. 1–8.
[35] D. Rey, “Minimisation des conflits aériens par des modulations devitesse,” Ph.D. dissertation, Univ. de Grenoble, Grenoble, France, 2012.
[36] R. Fourer, D. M. Gay, and B. W. Kernighan, AMPL: A Modeling Languagefor Mathematical Programming. Pacific Grove, CA, USA: Brooks/Cole,2003.
[37] User’s Manual for CPLEX, I. ILOG, Paris, France, 2009.
David Rey received the M.S. degree in mathematicsfrom Pontifícal Universidade Católica do Rio deJaneiro, Rio de Janeiro, Brazil, in 2008 and thePh.D. degree in mathematics and computer sciencefrom the Université de Grenoble, Grenoble, France,in 2012.
He is a Postdoctoral Researcher in operations re-search with the Research Center for Integrated Trans-port Innovation (rCITI), University of New SouthWales, Sydney, Australia. His key research interestsinclude transportation engineering, combinatorial
algorithms, mathematical programming, and fair optimization.
Christophe Rapine received the M.S. degreein computer science from the École NormaleSupérieure de Lyon, Lyon, France, in 1994 and thePh.D. degree in computer science from the Insti-tut National Polytechnique de Grenoble, Grenoble,France, in 1999.
He is a Professor with the Laboratoire de GénieIndustriel et de Production de Metz, Université deLorraine, Lorraine, France. His key research inter-ests include combinatorial optimization and the de-sign of approximation algorithms for scheduling, lot
sizing, and, more widely, industrial engineering problems in supply chainmanagement.
Vinayak V. Dixit received the M.T. degree in math-ematics and computing from the Indian Instituteof Technology Delhi, New Delhi, India, in 2005and the Ph.D. degree in civil engineering from theUniversity of Central Florida, Orlando, FL, USA,in 2008.
He is a Senior Lecturer with the Department ofCivil and Environmental Engineering, University ofNew South Wales, Sydney, Australia. His key re-search interests include risk in the transportationinfrastructure system as it relates to highway safety,
travel time uncertainty, and natural and man-made disasters.
Steven Travis Waller received the M.S. and Ph.D.degrees in industrial engineering from NorthwesternUniversity, Evanston, IL, USA, in 1999 and 2000,respectively.
He is the Evans and Peck Professor of TransportInnovation and the Director of the Research Centerfor Integrated Transportation Innovation at the Uni-versity of New South Wales, Sydney, Australia, incivil and environmental engineering.
Dr. Waller was named one of the world’s Top100 Young Innovators in Science and Engineering
in 2003 by MIT’s Technology Review magazine, was awarded the NationalScience Foundation’s CAREER Award in 2004, and received TRB’s FredBurggraf Research Award in 2009 and the 2011 Hojjat Adeli Award forInnovation in Computing.