control system design with swarm model for making flocking on unmanned small scale helicopter
TRANSCRIPT

CONTROL SYSTEM DESIGN WITH SWARM MODEL FOR MAKING
FLOCKING ON UNMANNED SMALL SCALE HELICOPTER Albert Sagala
Computer Engineering Department, Politeknik Informatika Del
Jl.Sisimagangaraja Desa Sitoluama Kec.Laguboti, TOBASA,Sumut
Abstrak: Fenomena alam, seperti pola kerumunan ikan di laut atau pola sekelompok burung yang bergerak bersama dalam
rangka bermigrasi ke daerah yang lebih nyaman untuk hidup telah menjadi perhatian para peneliti untuk waktu yang lama.
Berdasarkan pendekatan yang diambil, gerakan individu dipengaruhi oleh tiga faktor, 1) tarikan antara agen karena jarak antar
agen yang jauh, 2) tolakan antara agen karena jarak yang terlalu dekat, dan 3) daya tarik ke daerah yang lebih menguntungkan (
atau penolakan dari daerah tidak menguntungkan).
Dalam penelitian ini, dilakukan perancangan dan simulasi pada perilaku kawanan n-agen (agen yang dipilih adalah helikopter
skala kecil nir awak) dan diasumsikan bahwa semua sifat dinamis dari semua agen adalah seragam. Model dinamis swarm
digunakan untuk menghasilkan lintasan yang akan dilacak oleh Wahana Udara Nir Awak (WUNA). Pergerakan dinamis WUNA
didasarkan pada jarak antara WUNA serta kondisi lingkungan.
Kata Kunci: UAV, Small scale helicopter, WUNA, Swarm Intelligence,helicopter flocking,
1. Introduction
Swarming atau agregasi dari sekumpulan individu dalam
suatu grup dapat ditemukan secara alamiah pada berbagai
organisme, mulai dari organisme sederhana (bakteri)
sampai kepada organisme yang kompleks seperti mamalia
[1]. Perilaku tersebut dapat muncul karena berbagai
mekanisme, misalnya, suatu individu akan merespon
terhadap kondisi lingkungan disekitarnya, misalnya saja
suatu area di mana terkandung nutrisi yang melimpah atau
terdapat distribusi bahan kimia yang ditinggalkan oleh
organisme lainnya. Proses ini disebut dengan chemotaxis
dan dipergunakan oleh suatu organisme seperti bakteri dan
serangga sosial.
Evolusi dari perilaku swarming dikendalikan oleh suatu
keuntungan akan kebersamaan dan perilaku terkoordinasi
untuk menghindari pemangsa dan juga untuk meningkatkan
peluang mencari sumber makanan. Sebagai contoh, pada
[1] [2] Passino dan Gazy menjelaskan bagaimana social
forager sebagai suatu group sukses untuk melakukan
chemotaxis pada suatu daerah yang buruk jika
dibandingkan dengan melakukannya sendirian. Dengan
kata lain, suatu individu cenderung untuk bisa melakukan
lebih baik jika melakukan suatu pekerjaan secara kolektif.
2. Latar Belakang (Related Work)
Pada penelitian beberapa tahun belakangan ini, terdapat
ketertarikan yang sangat signifikan untuk pengontrolan
pergerakan agen yang bergerak membentuk suatu formasi
tertentu atau melakukan suatu pekerjaan yang terkoordinasi
[2] [3] [4] [7] [8] [9]. Hal ini dikarenakan banyak
keuntungan yang diperoleh jika sistem terkoordinasi
dilakukan, misalnya saja dapat melakukan suatu pekerjaan
yang sulit dilaksanakan apabila jika hanya dilakukan oleh
satu agen tunggal. Beberapa aplikasi yang cocok untuk
sistem terkoordinasi adalah pencarian bersama dengan
multi-agen, kontrol lalu lintas di udara, kontrol formasi
satelit, misi penjelajahan di bawah laut atau ruang angkasa.
Helikopter tanpa awak saat ini banyak dipakai untuk
melakukan berbagai misi, misalnya saja suatu helikopter,
Wahana Udara Nir Awak (WUNA) yang dipakai untuk
memonitor suatu wilayah pasca terjadinya suatu gempa
atau beberapa helikopter tanpa awak yang diinginkan untuk
bisa memonitor disuatu wilayah perbatasan negara.
Model swarm menginspirasi para peneliti untuk diterapkan
dalam bidang rekayasa, sehingga berbagai keuntungan
yang dihasilkan dalam model swarm bisa
diimplementasikan dalam bidang rekayasa. Wahana dapat
bergerak membentuk formasi sesuai dengan yang
ditentukan, untuk melakukan suatu misi pekerjaan
[3][4][5]. Misalnya, beberapa wahana yang dikirim ke
tempat terjadinya bencana, di sana wahaha ditugaskan
untuk mengumpulan data, sehingga bisa diambil langkah
strategis untuk pemulihan setelah bencana terjadi.
3. Model Dinamika Helikopter Yamaha R-50
Helikopter Yamaha R-50 pada awalnya adalah helikopter
skala kecil yang dipasarkan secara komersial untuk
kepentingan pertanian. Gambar 1 dan Tabel 1 memberikan
beberapa karakteristik fisis.

Gambar 1 Dimensi Helikopter Yamaha R-50
Tabel 1 Parameter Fisik Yamaha R-50
Rotor Speed 850 r.min-1
Tip Speed 449 ft/s
Dry weight 97 lb.
Instrumented 150lb.
Engine Single cylinder, 2-stroke
Flight autonomy 30 minutes
Model Ruang Keadaaan Dinamika R-50
4. Model Swarm
Misalkan ada M individu anggota swarm dalam sebuah
ruang Euclidean dengan dimensi-n. Dimodelkan masing-
masing individu sebagai titik dan mengabaikan dimensinya.
Posisi dari anggota i disimbolkan sebagai n
i Rx .
Diasumsikan gerak synchronous dan tidak ada waktu jeda,
semua anggota swarm bergerak secara simultan dan
masing-masing mengetahui posisi relatif dari anggota
lainnya. Gerak dinamis berevolusi secara kontinyu.
Persamaan gerak dari individu i diberikan oleh persamaan
.,...,1,)()(,1
MixxgxxxM
ijj
jiiii
Pers. 1
Pada suku pertama, dimisalkan nn RR:
merepresentasikan profile dari attractant/repellent atau
-profile, yang mana bisa sebagai profile dari adanya suatu
sumber makanan atau bahan kimia beracun. Diasumsikan
bahwa suatu area yang memilikni nilai minimum adalah
suatu area yang menarik bagi anggota swarm, maka
0)(y melambangkan attractant atau area dengan
nutrisi yang banyak dan 0)(y melambangkan
repellent atau suatu area dengan kandungan beracun, dan
0)(y melambangkan suatu wilayah netral. (.)
dapat mewakili beberapa kombinasi dari beberapa profile
attractant dan repellent.
Sehingga suku )( ii xx melambangkan gerak
individu menuju suatu wilayah dengan kandungan nutrisi
yang tinggi dan menjauhi suatu wilayah dengan wilayah
dengan kandungan racun tinggi.
Pada suku kedua, (.)g merepresentasikan fungsi tarikan
dan tolakan yang terjadi diantara anggota-anggota. Dengan
kata lain, arah dan besar gerak masing-masing anggota
ditentukan oleh penjumlahan fungsi tarikan dan tolakan
dari masing-masing anggota yang terlibat.
Fungsi tarikan dan tolakan yang dipakai adalah seperti pada
persamaan di bawah
)]||||
exp([)(2
c
ybayyg
Pers. 2
di mana a,b,dan c adalah konstanta positif, b>a, dan
yyy T|||| . Untuk kasus 1Ry dengan nilai a=1,
b=20, dan c=0.2, fungsi yang dihasilkan seperti pada
gambar di bawah.

Gambar 2 Fungsi Tarikan dan Tolakan
Pada Gambar 2 terlihat bahwa, fungsi tarikan dominan
pada jarak antara individu yang jauh dan sebaliknya fungsi
tolakan dominan pada jarak antara individu yang dekat.
Dengan mempersamakan 0)(yg , dapat dilihat bahwa
)(yg berubah tanda pada suatu jarak yang didefinisikan
sebagai
a
bcyatauyy ln||||0
Pers. 3
5. Pemodelan dan Formasi Kontrol Terbang
Pada penelitian ini dirancang sistem kontrol dua lup. Disain
sistem kontrol lup pertama pada model swarm untuk
menghasilkan penjejakan dan disain kontrol lup kedua pada
WUNA agar mampu melakukan penjejakan pada lintasan
yang dikeluarkan oleh model swarm. Pada disain kontrol
lup pertama, dilakukan disain dengan pendekatan kontrol
proporsional dan turunan, dengan memperhitungkan
kesalahan yang terdapat pada kesalahan posisi
i
p
i
p
i
p dee , kesalahan kecepatan i
v
i
v
i
v dee dan
kesalahan pada fungsi potensial buatan i
fip dxJ )( .
Pada disain kontrol lup kedua, mempergunakan model
dinamis helikopter ),()()()()( tutBtxtAtx
disain kontrol dengan pendekatan Regulator Linear
Kuadratik diskrit.
5.1 Perancangan Sistem Kontrol Model Swarm
Pada penelitian ini, model swarm yang dikembangkan
adalah suatu model yang memiliki ciri bahwa tidak ada
pemimpin di antara anggota swarm. Persamaan dinamika
anggota swarm dimodelkan seperti pada persamaan
ixxgxxxM
ijj
jiiii ,)()(,1
Pers. 4
Pada penelitian ini, protokol kontrol untuk agent
dimodelkan sbb:
.)(||||
exp)(,1
ipf
j
p
i
p
N
jii
j
p
i
p
iv
i
vb
i
pai
xJkeec
eeba
vkekeku
Pers. 5
Blok Diagram Sistem Kontrol yang disain adalah
Gambar 3 Blok Desain Kontrol Model Swarm
Pada pengontrol P , terdapat 3 buah Penguatan controller
proporsional, yakni rba kkk ,, . Sedangkan penguatan
vk dan penguatan fk secara berturut-turut adalah
koefisien redaman kecepatan dan penguatan untuk
mengikuti profile pergerakan agen yang diinginkan.
Penalaan penguatan P dan D dilakukan secara manual,
seperti pada hasil yang diperoleh pada Bab berikutnya.
5.2 Perancangan Sistem Kontrol Helikopter Yamaha R-
50
Rancang blok sistem control helicopter Yamaha R-50
seperti pada gambar di bawah.
-5 -4 -3 -2 -1 0 1 2 3 4 5 -5 -4 -3 -2 -1 0 1 2 3 4 5
Fungsi Tarikan Tolakan
Jarak Antar Individu
Intensitas Tarikan Tolakan

Gambar 4 Blok diagram Kontrol WUNA
Persamaan Regulator Kuadratik Linear
Persamaan linear regulator dalam teori kontrol optimal
merepresentasikan kelas permasalahan dimana plane
dinamis adalah linear dan bentuk quadratik untuk kriteria
performansi yang dipergunakan. Persamaan dinamika
linear (dapat juga waktu berubah), dituliskan sbb:
),()()()()( tutBtxtAtx
Pers. 6
dan biaya adalah kuadratik dalam bentuk
,)]()()()()()([2
1)()(
2
1
0
dttutRtutxtQtxtfHxtfxJ Tt
t
Tf
Pers. 7
Dimana kebutuhan untuk matriks pembobotan diberikan
oleh
,0THH
0)()(
,0)()(
T
T
tRtR
tQtQ
Pers. 8
Tidak ada batasan dan nilai dari f adalah tetap. Hukum
kontrol optimal umpan balik keadaan diperoleh dengan
persamaan Hamiltonian-Jacoby-Bellman (HJB).
].,),(),([ ** tJtutxHH x , untuk persoalan di atas, H
dituliskan seperti di bawah.
)].()()()()[,()()()(2
1)()()(
2
1 * tutBtxtAtxJtutRtutxtQtxH x
TT
Pers. 9
, diminimalkan terhadap u, diperoleh
0)(
)(),()()(
2
2
*
tRdu
Hd
tBtxJtRtudu
dHx
Pers. 10
Kontrol optimal diperoleh dengan kondisi stasioner,
diselesaikan untuk u.
T
x
T txJtBtRtu ),()()()( *1*
Pers. 11
Persamaan Hamiltonian selanjutnya dituliskan menjadi
.),()()()(),(2
1)()()(
2
1)()(),( *1** T
x
T
x
T
x txJtBtRtBtxJtxtQtxtxtAtxJH
Pers. 12
Dari [12], persamaan HJB diturunkan, dengan nilai
perubahan penguatan 0K , menghasilkan Persamaan
Aljabar Riccati,
0)( 1 TTTT KBKBRKAtKAQ
Pers. 13
Agar K(t) memenuhi aljabar Riccati maka, persamaan
kontrol optimal yang dihasilkan adalah
).()( 1* tKxBRtu T
Pers. 14
Persamaan di atas adalah persamaan umpan balik keadaaan
untuk persoalan kontinyu LQR. Sedangkan pada penelitian
ini dilakukan diskritisasi dengan mempergunakan fungsi
lqrd untuk memperoleh penguatan K diskrit yang telah
disedikan oleh MATLAB.
5.3 Formulasi Penjejakan Lintasan
Penggunaan desain LQR untuk penjejakan lintasan, maka
permasalahan regulator harus dikonversi menjadi persoalan
penjejakan. Dalam masalah penjejakan, nilai keluaran y
dibandingkan dengan nilai y referensi. Tujuan yang ingin
diperoleh adalah kesalahan antara nilai referensi dan nilai
keluaran menuju nol, biasanya dengan menambahkan
sebuah integrator pada kesalahan sinyal dan selanjutnya
meminimalkan. Alternatif pendekatan lainnya adalah
dengan mempergunakan turunan dari kesalahan sinyal.

Misalkan diasumsikan diperoleh pengukuran yang
sempurna, maka kesalahan sistem dituliskan dalam bentuk
)()()( txtxtxy referrorerror
Pers. 15
Turunan terhadap waktu, diperoleh persamaan
)()()( txtxtx referror
Pers. 16
Jika referensi didefinisikan tetap, maka 0)(txref ,
dihasilkan )()( txtxerror .Maka hukum lintasan
penjejakan dapat mempergunakan persamaan umum di
bawah
)()( txtxerror
Pers. 17
,
dimana adalah konstanta bebas yang akan menentukan
bobot dari performansi penjejakan dalam fungsi biaya.
Dalam bentuk matriks, persamaan di atas dapat ditulis
menjadi
)(
)(
)(
)(
)(
)(
)(
tz
ty
tx
tz
ty
tx
tx
error
error
error
error
Pers. 18
Substitusi wzvyux ,, , maka persamaan di
atas dapat dituliskan menjadi
)(
)(
)(
)(
)(
)(
)(
tw
tv
tu
tz
ty
tx
tx
error
error
error
error
Pers. 19
Pada perancangan sistem kontrol untuk model WUNA
yang dipakai, model matriks A10x10 diperluas menjadi
matriks A14x14 dan matriks B10x4 diperluas menjadi B14x4,
sehingga lebih memudahkan untuk melakukan penjejakan
dalam orientasi NEA (North East Altitude).
Dan dari hasil penalaan terhadap penguatan LQR, saat ini
diperoleh penguatan Q dan dan penguatan R sbb.
200000000000000
020000000000000
002000000000000
000200000000000
000020000000000
000002000000000
000000200000000
000000020000000
000000002000000
000000000200000
000000000020000
000000000001000000
00000000000020000
00000000000002000
Q
Pers. 20
Dan matriks R=
1000
0100
0010
0001
Pers. 21
Penguatan pembobotan keadaan x,y,z diberikan tinggi
karena akan dilakukan penjejakan terhadap x,y,z.
Sedangkan nilai pembobotan untuk keadaan z lima kali
lebih besar dari pada x dan y, hal ini karena pada simulasi
diperoleh bahwa z sangat sensitive terhadap perubahan
lintasan, sehingga berakibat kesalahan lebih besar jika
dibandingkan dengan lintasan x dan y.
Agar hasil simulasi dapat dengan mudah diinterpretasikan
secara fisis, maka dilakukan transformasi dari body frame
ke inertial frame, dengan transformasi matriks seperti di
bawah
cccssscsscsc
csccssssccss
ssccc
T B
I
Pers. 22
Di mana cos(.),(.)c dan sin(.).(.)s Dengan
transformasi ini, maka hasil akhir dari simulasi yang akan
dijalankan akan dalam bentuk koordinat inertial frame.
Persamaan terkait untuk posisi dan kecepatan dalam
kerangka inersia adalah:
TB
I
T zyxTAEN ],,[],,[
Pers. 23
TB
I
T
zyx wvuTVVV ],,[],,[
Pers. 24
6. Simulasi Formasi Terbang
Hasil penjejakan lintasan yang dihasilkan pada program
simulasi Matlab adalah sbb:
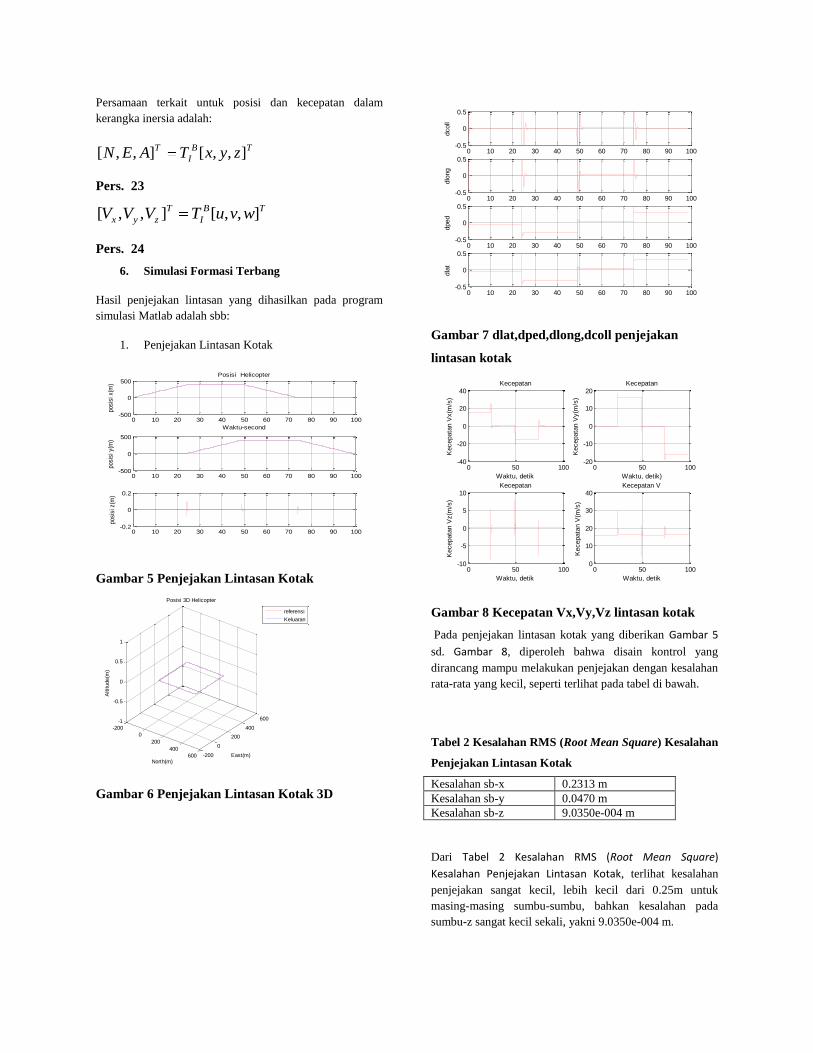
1. Penjejakan Lintasan Kotak
Gambar 5 Penjejakan Lintasan Kotak
Gambar 6 Penjejakan Lintasan Kotak 3D
Gambar 7 dlat,dped,dlong,dcoll penjejakan
lintasan kotak
Gambar 8 Kecepatan Vx,Vy,Vz lintasan kotak
Pada penjejakan lintasan kotak yang diberikan Gambar 5
sd. Gambar 8, diperoleh bahwa disain kontrol yang
dirancang mampu melakukan penjejakan dengan kesalahan
rata-rata yang kecil, seperti terlihat pada tabel di bawah.
Tabel 2 Kesalahan RMS (Root Mean Square) Kesalahan
Penjejakan Lintasan Kotak
Kesalahan sb-x 0.2313 m
Kesalahan sb-y 0.0470 m
Kesalahan sb-z 9.0350e-004 m
Dari Tabel 2 Kesalahan RMS (Root Mean Square)
Kesalahan Penjejakan Lintasan Kotak, terlihat kesalahan
penjejakan sangat kecil, lebih kecil dari 0.25m untuk
masing-masing sumbu-sumbu, bahkan kesalahan pada
sumbu-z sangat kecil sekali, yakni 9.0350e-004 m.
0 10 20 30 40 50 60 70 80 90 100-500
0
500
Waktu-second
posi
si x
(m)
Posisi Helicopter
0 10 20 30 40 50 60 70 80 90 100-500
0
500
posi
si y
(m)
0 10 20 30 40 50 60 70 80 90 100-0.2
0
0.2
posi
si z
(m)
-200
0
200
400
600 -200
0
200
400
600-1
-0.5
0
0.5
1
Altitude(m
)
Posisi 3D Helicopter
North(m)East(m)
referensi
Keluaran
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dcoll
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dlo
ng
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dped
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dla
t
0 50 100-40
-20
0
20
40
Kecepata
n V
x(m
/s)
Waktu, detik
Kecepatan
0 50 100-20
-10
0
10
20
Kecepata
n V
y(m
/s)
Waktu, detik)
Kecepatan
0 50 100-10
-5
0
5
10
Kecepata
n V
z(m
/s)
Waktu, detik
Kecepatan
0 50 1000
10
20
30
40
Kecepata
n V
(m/s
)Waktu, detik
Kecepatan V
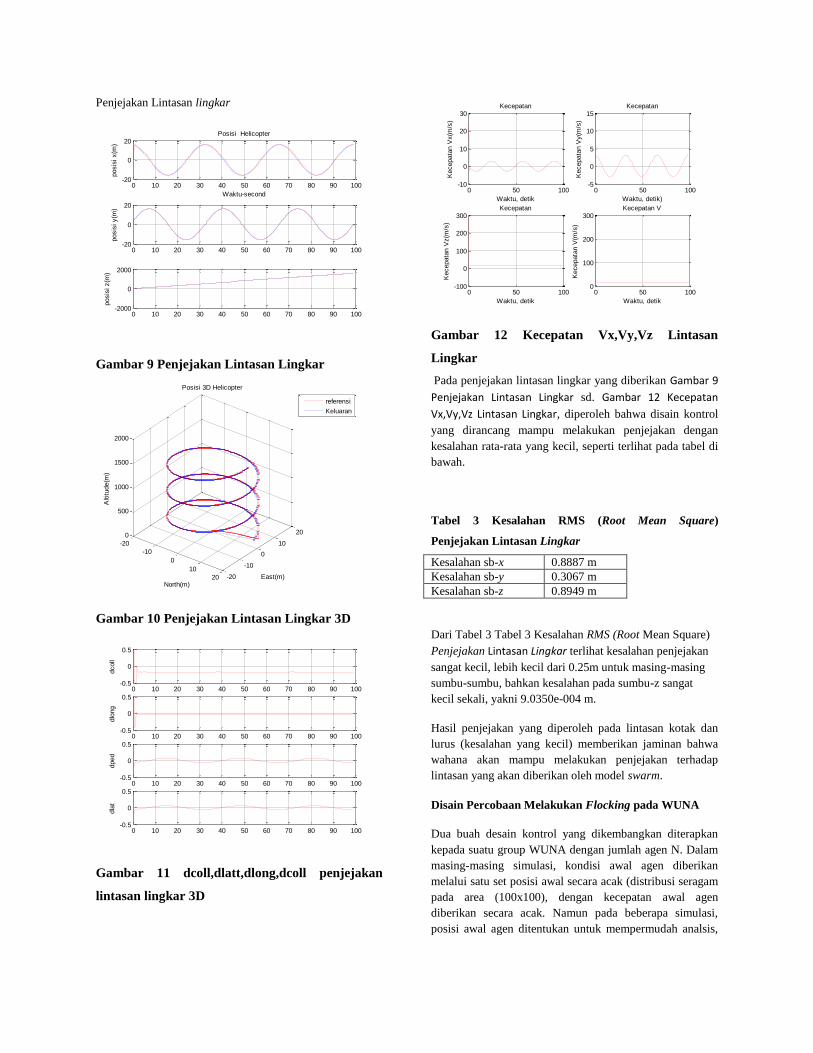
Penjejakan Lintasan lingkar
Gambar 9 Penjejakan Lintasan Lingkar
Gambar 10 Penjejakan Lintasan Lingkar 3D
Gambar 11 dcoll,dlatt,dlong,dcoll penjejakan
lintasan lingkar 3D
Gambar 12 Kecepatan Vx,Vy,Vz Lintasan
Lingkar
Pada penjejakan lintasan lingkar yang diberikan Gambar 9
Penjejakan Lintasan Lingkar sd. Gambar 12 Kecepatan
Vx,Vy,Vz Lintasan Lingkar, diperoleh bahwa disain kontrol
yang dirancang mampu melakukan penjejakan dengan
kesalahan rata-rata yang kecil, seperti terlihat pada tabel di
bawah.
Tabel 3 Kesalahan RMS (Root Mean Square)
Penjejakan Lintasan Lingkar
Kesalahan sb-x 0.8887 m
Kesalahan sb-y 0.3067 m
Kesalahan sb-z 0.8949 m
Dari Tabel 3 Tabel 3 Kesalahan RMS (Root Mean Square)
Penjejakan Lintasan Lingkar terlihat kesalahan penjejakan
sangat kecil, lebih kecil dari 0.25m untuk masing-masing
sumbu-sumbu, bahkan kesalahan pada sumbu-z sangat
kecil sekali, yakni 9.0350e-004 m.
Hasil penjejakan yang diperoleh pada lintasan kotak dan
lurus (kesalahan yang kecil) memberikan jaminan bahwa
wahana akan mampu melakukan penjejakan terhadap
lintasan yang akan diberikan oleh model swarm.
Disain Percobaan Melakukan Flocking pada WUNA
Dua buah desain kontrol yang dikembangkan diterapkan
kepada suatu group WUNA dengan jumlah agen N. Dalam
masing-masing simulasi, kondisi awal agen diberikan
melalui satu set posisi awal secara acak (distribusi seragam
pada area (100x100), dengan kecepatan awal agen
diberikan secara acak. Namun pada beberapa simulasi,
posisi awal agen ditentukan untuk mempermudah analsis,
0 10 20 30 40 50 60 70 80 90 100-20
0
20
Waktu-second
posis
i x(m
)
Posisi Helicopter
0 10 20 30 40 50 60 70 80 90 100-20
0
20
posis
i y(m
)
0 10 20 30 40 50 60 70 80 90 100-2000
0
2000
posis
i z(m
)
-20
-10
0
10
20 -20
-10
0
10
200
500
1000
1500
2000
East(m)
Posisi 3D Helicopter
North(m)
Altitude(m
)
referensi
Keluaran
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dcoll
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dlo
ng
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dped
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
dla
t
0 50 100-10
0
10
20
30
Kecepata
n V
x(m
/s)
Waktu, detik
Kecepatan
0 50 100-5
0
5
10
15
Kecepata
n V
y(m
/s)
Waktu, detik)
Kecepatan
0 50 100-100
0
100
200
300
Kecepata
n V
z(m
/s)
Waktu, detik
Kecepatan
0 50 1000
100
200
300
Kecepata
n V
(m/s
)
Waktu, detik
Kecepatan V
misalnya melihat pengaruh dari faktor perubahan nilai
penguatan tarikan atau tolakan.
7. Hasil dan Pembahasan
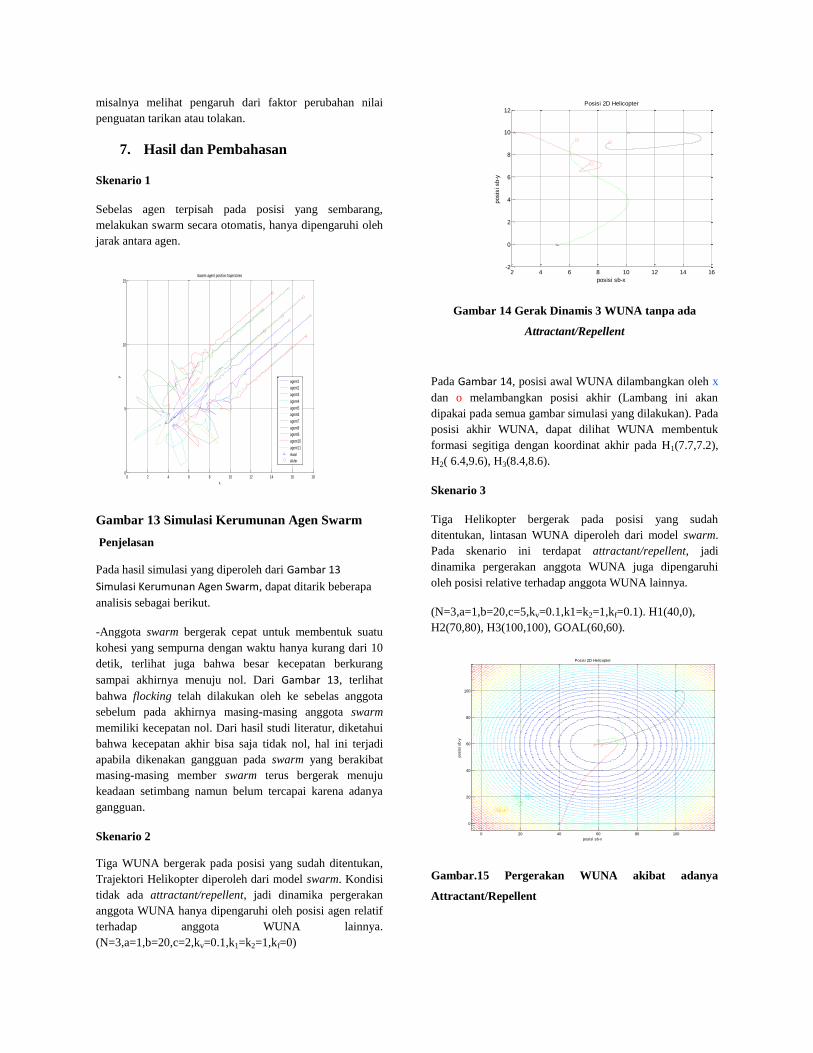
Skenario 1
Sebelas agen terpisah pada posisi yang sembarang,
melakukan swarm secara otomatis, hanya dipengaruhi oleh
jarak antara agen.
Gambar 13 Simulasi Kerumunan Agen Swarm
Penjelasan
Pada hasil simulasi yang diperoleh dari Gambar 13
Simulasi Kerumunan Agen Swarm, dapat ditarik beberapa
analisis sebagai berikut.
-Anggota swarm bergerak cepat untuk membentuk suatu
kohesi yang sempurna dengan waktu hanya kurang dari 10
detik, terlihat juga bahwa besar kecepatan berkurang
sampai akhirnya menuju nol. Dari Gambar 13, terlihat
bahwa flocking telah dilakukan oleh ke sebelas anggota
sebelum pada akhirnya masing-masing anggota swarm
memiliki kecepatan nol. Dari hasil studi literatur, diketahui
bahwa kecepatan akhir bisa saja tidak nol, hal ini terjadi
apabila dikenakan gangguan pada swarm yang berakibat
masing-masing member swarm terus bergerak menuju
keadaan setimbang namun belum tercapai karena adanya
gangguan.
Skenario 2
Tiga WUNA bergerak pada posisi yang sudah ditentukan,
Trajektori Helikopter diperoleh dari model swarm. Kondisi
tidak ada attractant/repellent, jadi dinamika pergerakan
anggota WUNA hanya dipengaruhi oleh posisi agen relatif
terhadap anggota WUNA lainnya.
(N=3,a=1,b=20,c=2,kv=0.1,k1=k2=1,kf=0)
Gambar 14 Gerak Dinamis 3 WUNA tanpa ada
Attractant/Repellent
Pada Gambar 14, posisi awal WUNA dilambangkan oleh x
dan o melambangkan posisi akhir (Lambang ini akan
dipakai pada semua gambar simulasi yang dilakukan). Pada
posisi akhir WUNA, dapat dilihat WUNA membentuk
formasi segitiga dengan koordinat akhir pada H1(7.7,7.2),
H2( 6.4,9.6), H3(8.4,8.6).
Skenario 3
Tiga Helikopter bergerak pada posisi yang sudah
ditentukan, lintasan WUNA diperoleh dari model swarm.
Pada skenario ini terdapat attractant/repellent, jadi
dinamika pergerakan anggota WUNA juga dipengaruhi
oleh posisi relative terhadap anggota WUNA lainnya.
(N=3,a=1,b=20,c=5,kv=0.1,k1=k2=1,kf=0.1). H1(40,0),
H2(70,80), H3(100,100), GOAL(60,60).
Gambar.15 Pergerakan WUNA akibat adanya
Attractant/Repellent
0 2 4 6 8 10 12 14 16 180
5
10
15
x
y
Swarm agent position trajectories
agent1
agent2
agent3
agent4
agent5
agent6
agent7
agent8
agent9
agent10
agent11
Awal
Akhir
2 4 6 8 10 12 14 16-2
0
2
4
6
8
10
12
posisi sb-x
posis
i sb-y
Posisi 2D Helicopter
posisi sb-x
posis
i sb-y
Posisi 2D Helicopter
0 20 40 60 80 100
0
20
40
60
80
100
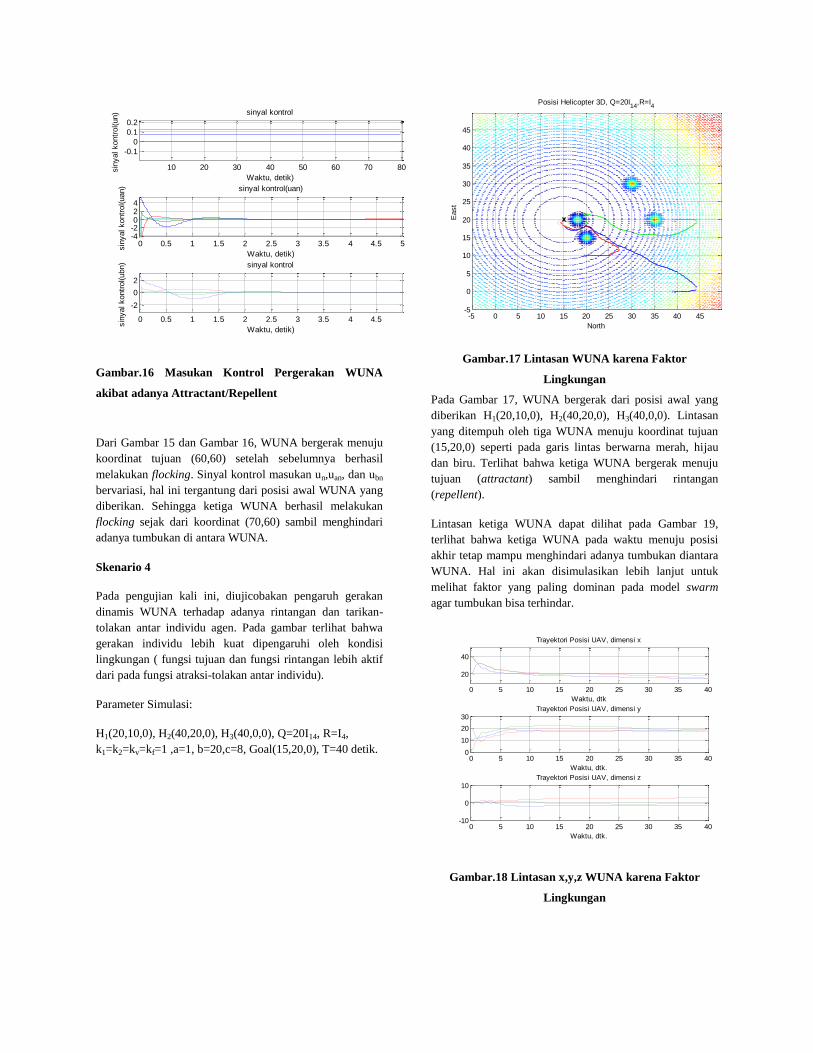
Gambar.16 Masukan Kontrol Pergerakan WUNA
akibat adanya Attractant/Repellent
Dari Gambar 15 dan Gambar 16, WUNA bergerak menuju
koordinat tujuan (60,60) setelah sebelumnya berhasil
melakukan flocking. Sinyal kontrol masukan un,uan, dan ubn
bervariasi, hal ini tergantung dari posisi awal WUNA yang
diberikan. Sehingga ketiga WUNA berhasil melakukan
flocking sejak dari koordinat (70,60) sambil menghindari
adanya tumbukan di antara WUNA.
Skenario 4
Pada pengujian kali ini, diujicobakan pengaruh gerakan
dinamis WUNA terhadap adanya rintangan dan tarikan-
tolakan antar individu agen. Pada gambar terlihat bahwa
gerakan individu lebih kuat dipengaruhi oleh kondisi
lingkungan ( fungsi tujuan dan fungsi rintangan lebih aktif
dari pada fungsi atraksi-tolakan antar individu).
Parameter Simulasi:
H1(20,10,0), H2(40,20,0), H3(40,0,0), Q=20I14, R=I4,
k1=k2=kv=kf=1 ,a=1, b=20,c=8, Goal(15,20,0), T=40 detik.
Gambar.17 Lintasan WUNA karena Faktor
Lingkungan
Pada Gambar 17, WUNA bergerak dari posisi awal yang
diberikan H1(20,10,0), H2(40,20,0), H3(40,0,0). Lintasan
yang ditempuh oleh tiga WUNA menuju koordinat tujuan
(15,20,0) seperti pada garis lintas berwarna merah, hijau
dan biru. Terlihat bahwa ketiga WUNA bergerak menuju
tujuan (attractant) sambil menghindari rintangan
(repellent).
Lintasan ketiga WUNA dapat dilihat pada Gambar 19,
terlihat bahwa ketiga WUNA pada waktu menuju posisi
akhir tetap mampu menghindari adanya tumbukan diantara
WUNA. Hal ini akan disimulasikan lebih lanjut untuk
melihat faktor yang paling dominan pada model swarm
agar tumbukan bisa terhindar.
Gambar.18 Lintasan x,y,z WUNA karena Faktor
Lingkungan
10 20 30 40 50 60 70 80
-0.1
0
0.1
0.2sin
yal kontr
ol(un)
Waktu, detik)
sinyal kontrol
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-4-2024
sin
yal kontr
ol(uan)
Waktu, detik)
sinyal kontrol(uan)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
-2
0
2
sin
yal kontr
ol(ubn)
Waktu, detik)
sinyal kontrol
North
Posisi Helicopter 3D, Q=20I14
,R=I4
East
-5 0 5 10 15 20 25 30 35 40 45-5
0
5
10
15
20
25
30
35
40
45
0 5 10 15 20 25 30 35 40
20
40
Trayektori Posisi UAV, dimensi x
Waktu, dtk
0 5 10 15 20 25 30 35 400
10
20
30Trayektori Posisi UAV, dimensi y
Waktu, dtk.
0 5 10 15 20 25 30 35 40-10
0
10Trayektori Posisi UAV, dimensi z
Waktu, dtk.
rintangan
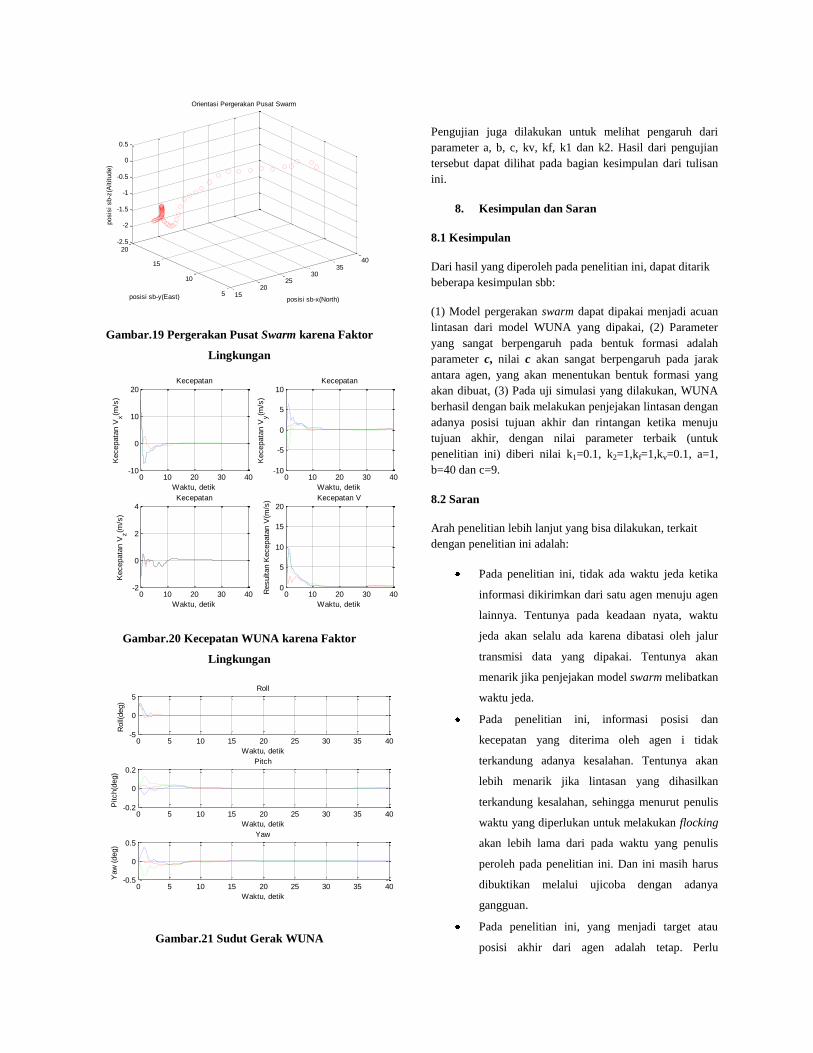
Gambar.19 Pergerakan Pusat Swarm karena Faktor
Lingkungan
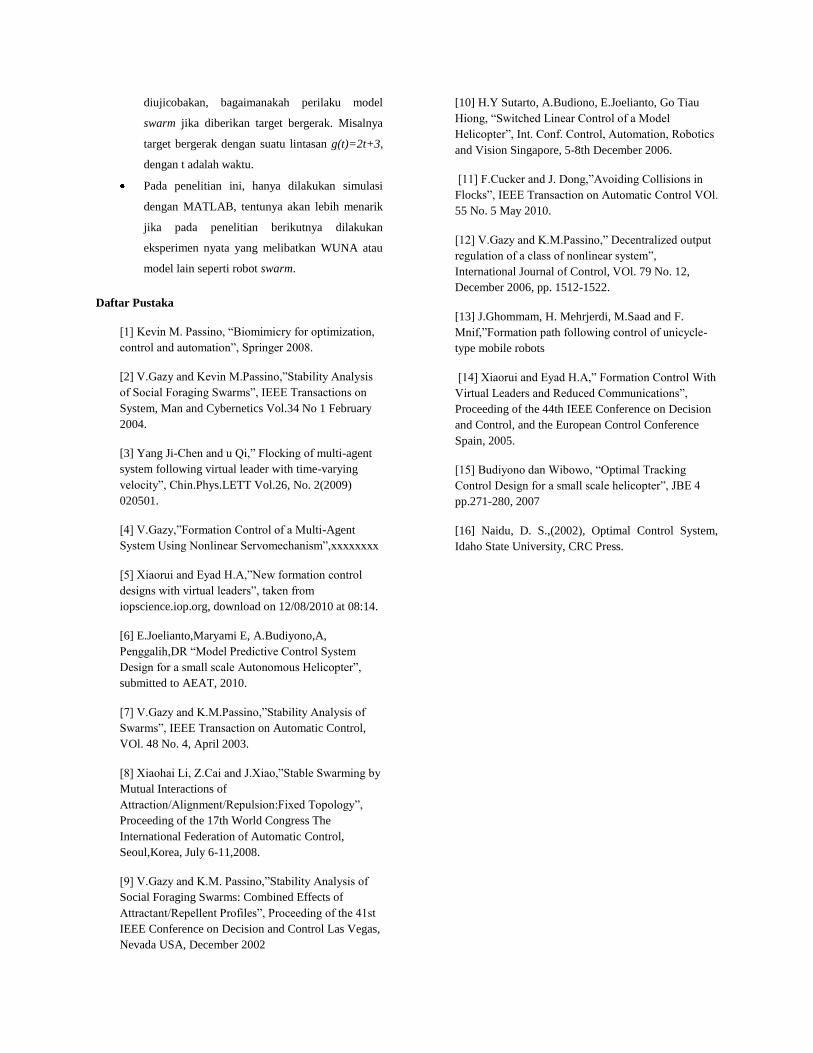
Gambar.20 Kecepatan WUNA karena Faktor
Lingkungan
Gambar.21 Sudut Gerak WUNA
Pengujian juga dilakukan untuk melihat pengaruh dari
parameter a, b, c, kv, kf, k1 dan k2. Hasil dari pengujian
tersebut dapat dilihat pada bagian kesimpulan dari tulisan
ini.
8. Kesimpulan dan Saran
8.1 Kesimpulan
Dari hasil yang diperoleh pada penelitian ini, dapat ditarik
beberapa kesimpulan sbb:
(1) Model pergerakan swarm dapat dipakai menjadi acuan
lintasan dari model WUNA yang dipakai, (2) Parameter
yang sangat berpengaruh pada bentuk formasi adalah
parameter c, nilai c akan sangat berpengaruh pada jarak
antara agen, yang akan menentukan bentuk formasi yang
akan dibuat, (3) Pada uji simulasi yang dilakukan, WUNA
berhasil dengan baik melakukan penjejakan lintasan dengan
adanya posisi tujuan akhir dan rintangan ketika menuju
tujuan akhir, dengan nilai parameter terbaik (untuk
penelitian ini) diberi nilai k1=0.1, k2=1,kf=1,kv=0.1, a=1,
b=40 dan c=9.
8.2 Saran
Arah penelitian lebih lanjut yang bisa dilakukan, terkait
dengan penelitian ini adalah:
Pada penelitian ini, tidak ada waktu jeda ketika
informasi dikirimkan dari satu agen menuju agen
lainnya. Tentunya pada keadaan nyata, waktu
jeda akan selalu ada karena dibatasi oleh jalur
transmisi data yang dipakai. Tentunya akan
menarik jika penjejakan model swarm melibatkan
waktu jeda.
Pada penelitian ini, informasi posisi dan
kecepatan yang diterima oleh agen i tidak
terkandung adanya kesalahan. Tentunya akan
lebih menarik jika lintasan yang dihasilkan
terkandung kesalahan, sehingga menurut penulis
waktu yang diperlukan untuk melakukan flocking
akan lebih lama dari pada waktu yang penulis
peroleh pada penelitian ini. Dan ini masih harus
dibuktikan melalui ujicoba dengan adanya
gangguan.
Pada penelitian ini, yang menjadi target atau
posisi akhir dari agen adalah tetap. Perlu
1520
2530
3540
5
10
15
20-2.5
-2
-1.5
-1
-0.5
0
0.5
posisi sb-x(North)
Orientasi Pergerakan Pusat Swarm
posisi sb-y(East)
posis
i sb-z
(Altitude)
0 10 20 30 40-10
0
10
20
Kecepata
n V
x(m
/s)
Waktu, detik
Kecepatan
0 10 20 30 40-10
-5
0
5
10
Kecepata
n V
y(m
/s)
Waktu, detik
Kecepatan
0 10 20 30 40-2
0
2
4
Kecepata
n V
z(m
/s)
Waktu, detik
Kecepatan
0 10 20 30 400
5
10
15
20
Resultan K
ecepata
n V
(m/s
)
Waktu, detik
Kecepatan V
0 5 10 15 20 25 30 35 40-5
0
5
Roll(
deg)
Waktu, detik
Roll
0 5 10 15 20 25 30 35 40-0.2
0
0.2
Pitch(d
eg)
Waktu, detik
Pitch
0 5 10 15 20 25 30 35 40-0.5
0
0.5
Yaw
(deg)
Waktu, detik
Yaw
diujicobakan, bagaimanakah perilaku model
swarm jika diberikan target bergerak. Misalnya
target bergerak dengan suatu lintasan g(t)=2t+3,
dengan t adalah waktu.
Pada penelitian ini, hanya dilakukan simulasi
dengan MATLAB, tentunya akan lebih menarik
jika pada penelitian berikutnya dilakukan
eksperimen nyata yang melibatkan WUNA atau
model lain seperti robot swarm.
Daftar Pustaka
[1] Kevin M. Passino, “Biomimicry for optimization,
control and automation”, Springer 2008.
[2] V.Gazy and Kevin M.Passino,”Stability Analysis
of Social Foraging Swarms”, IEEE Transactions on
System, Man and Cybernetics Vol.34 No 1 February
2004.
[3] Yang Ji-Chen and u Qi,” Flocking of multi-agent
system following virtual leader with time-varying
velocity”, Chin.Phys.LETT Vol.26, No. 2(2009)
020501.
[4] V.Gazy,”Formation Control of a Multi-Agent
System Using Nonlinear Servomechanism”,xxxxxxxx
[5] Xiaorui and Eyad H.A,”New formation control
designs with virtual leaders”, taken from
iopscience.iop.org, download on 12/08/2010 at 08:14.
[6] E.Joelianto,Maryami E, A.Budiyono,A,
Penggalih,DR “Model Predictive Control System
Design for a small scale Autonomous Helicopter”,
submitted to AEAT, 2010.
[7] V.Gazy and K.M.Passino,”Stability Analysis of
Swarms”, IEEE Transaction on Automatic Control,
VOl. 48 No. 4, April 2003.
[8] Xiaohai Li, Z.Cai and J.Xiao,”Stable Swarming by
Mutual Interactions of
Attraction/Alignment/Repulsion:Fixed Topology”,
Proceeding of the 17th World Congress The
International Federation of Automatic Control,
Seoul,Korea, July 6-11,2008.
[9] V.Gazy and K.M. Passino,”Stability Analysis of
Social Foraging Swarms: Combined Effects of
Attractant/Repellent Profiles”, Proceeding of the 41st
IEEE Conference on Decision and Control Las Vegas,
Nevada USA, December 2002
[10] H.Y Sutarto, A.Budiono, E.Joelianto, Go Tiau
Hiong, “Switched Linear Control of a Model
Helicopter”, Int. Conf. Control, Automation, Robotics
and Vision Singapore, 5-8th December 2006.
[11] F.Cucker and J. Dong,”Avoiding Collisions in
Flocks”, IEEE Transaction on Automatic Control VOl.
55 No. 5 May 2010.
[12] V.Gazy and K.M.Passino,” Decentralized output
regulation of a class of nonlinear system”,
International Journal of Control, VOl. 79 No. 12,
December 2006, pp. 1512-1522.
[13] J.Ghommam, H. Mehrjerdi, M.Saad and F.
Mnif,”Formation path following control of unicycle-
type mobile robots
[14] Xiaorui and Eyad H.A,” Formation Control With
Virtual Leaders and Reduced Communications”,
Proceeding of the 44th IEEE Conference on Decision
and Control, and the European Control Conference
Spain, 2005.
[15] Budiyono dan Wibowo, “Optimal Tracking
Control Design for a small scale helicopter”, JBE 4
pp.271-280, 2007
[16] Naidu, D. S.,(2002), Optimal Control System,
Idaho State University, CRC Press.