2. an introduction to the helicopter
TRANSCRIPT
Active Aeroelasticity and Rotorcraft Lab.
2. An Introduction to the Helicopter
2020
Prof. SangJoon Shin
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
I. Helicopter Configurations
II. Helicopter Control Methods
III. An Intro to the Helicopter
IV. Pilot Controls
V. Rotor Types
VI. Mechanics of Rotor Control
VII. Conventional Helicopter Design Features
VIII. Flight Characteristics of the Helicopter
Overview
1
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
2
Helicopter Configurations
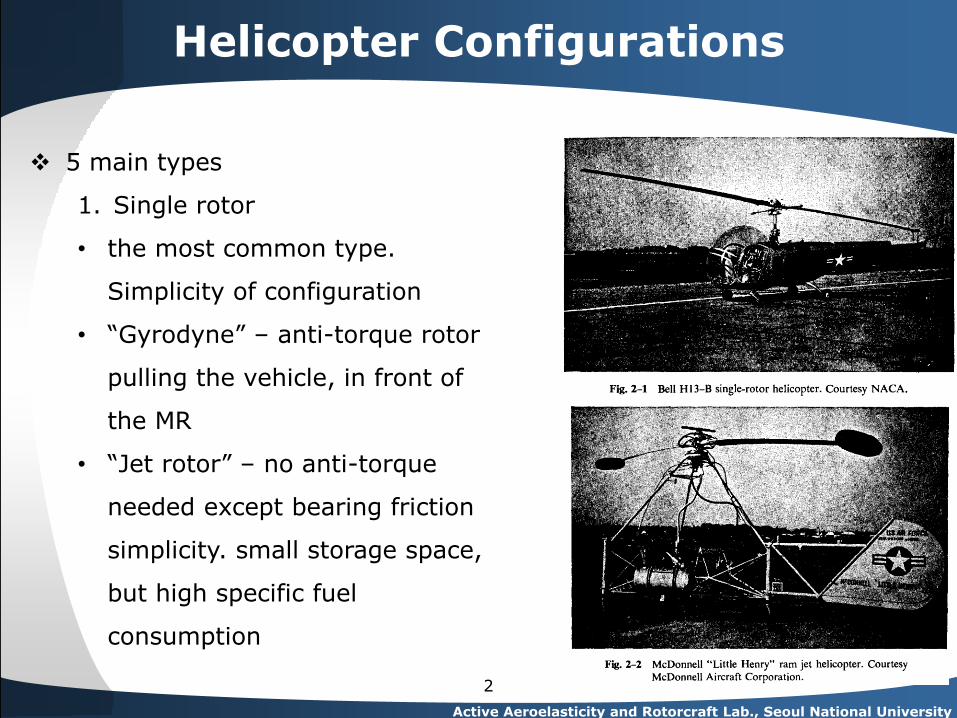
5 main types
1. Single rotor
• the most common type.
Simplicity of configuration
• “Gyrodyne” – anti-torque rotor
pulling the vehicle, in front of
the MR
• “Jet rotor” – no anti-torque
needed except bearing friction
simplicity. small storage space,
but high specific fuel
consumption
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
3
Helicopter Configurations
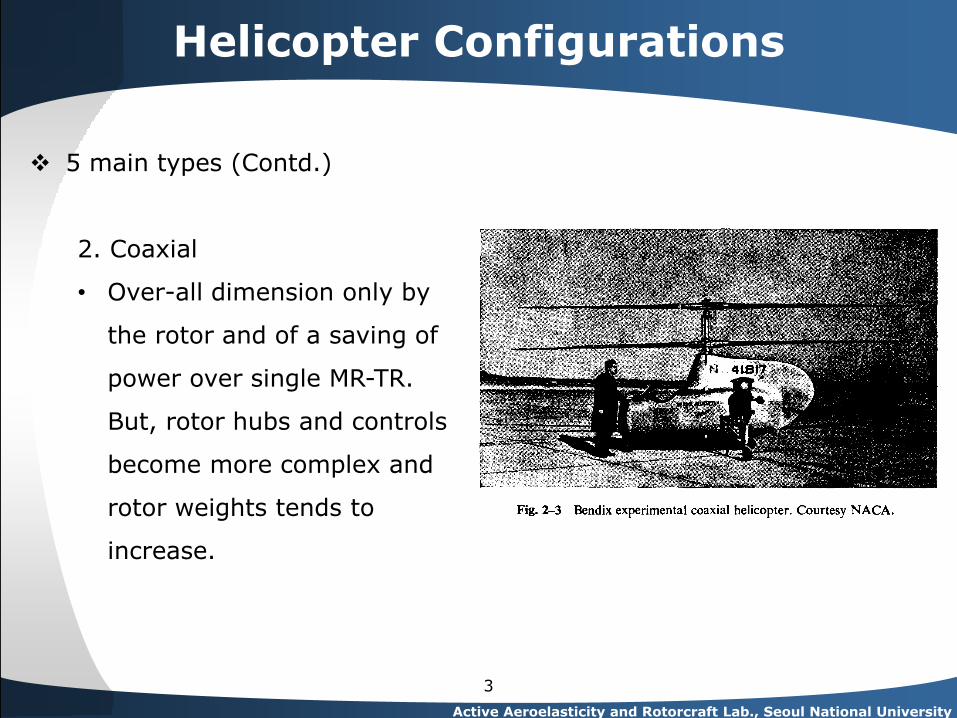
5 main types (Contd.)
2. Coaxial
• Over-all dimension only by
the rotor and of a saving of
power over single MR-TR.
But, rotor hubs and controls
become more complex and
rotor weights tends to
increase.
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
4
Helicopter Configurations
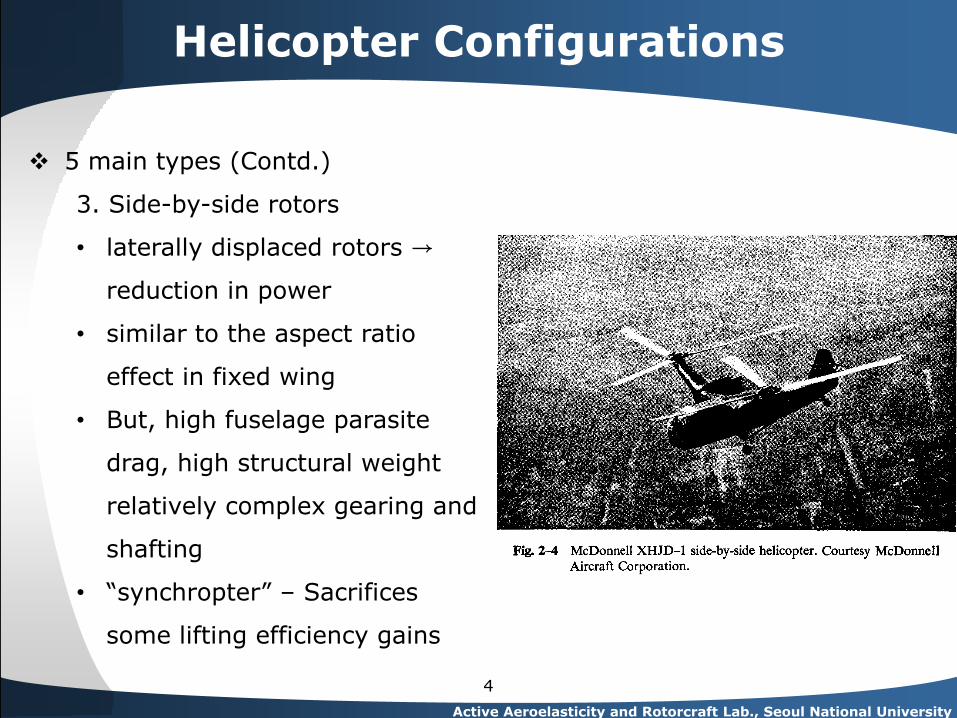
5 main types (Contd.)
3. Side-by-side rotors
• laterally displaced rotors →
reduction in power
• similar to the aspect ratio
effect in fixed wing
• But, high fuselage parasite
drag, high structural weight
relatively complex gearing and
shafting
• “synchropter” – Sacrifices
some lifting efficiency gains
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
5
Helicopter Configurations
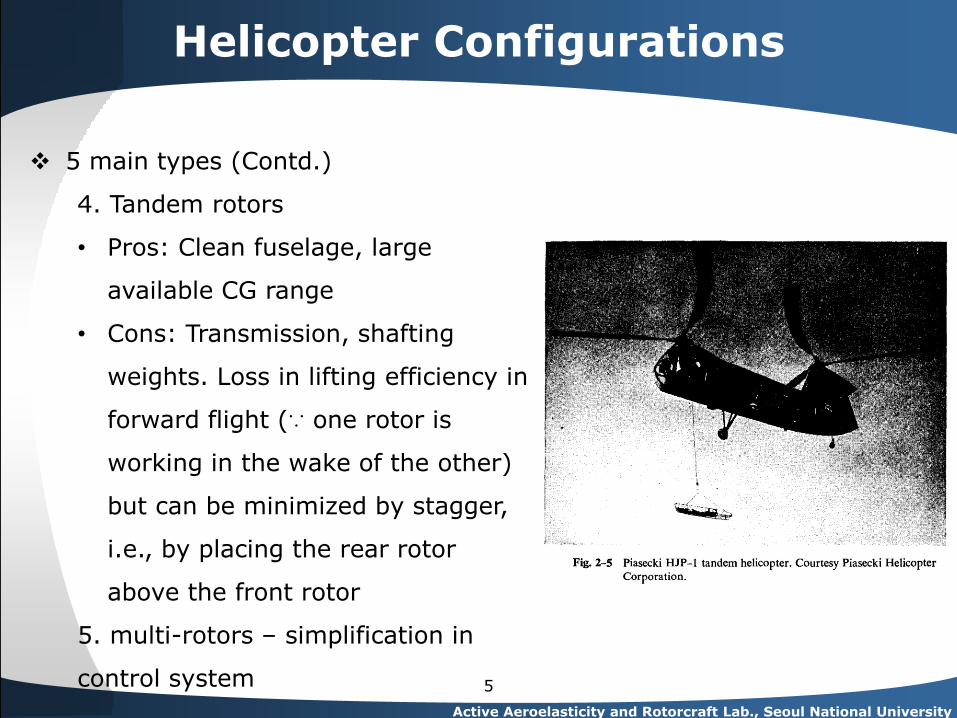
5 main types (Contd.)
4. Tandem rotors
• Pros: Clean fuselage, large
available CG range
• Cons: Transmission, shafting
weights. Loss in lifting efficiency in
forward flight (∵ one rotor is
working in the wake of the other)
but can be minimized by stagger,
i.e., by placing the rear rotor
above the front rotor
5. multi-rotors – simplification in
control system
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
6
Helicopter Control Methods
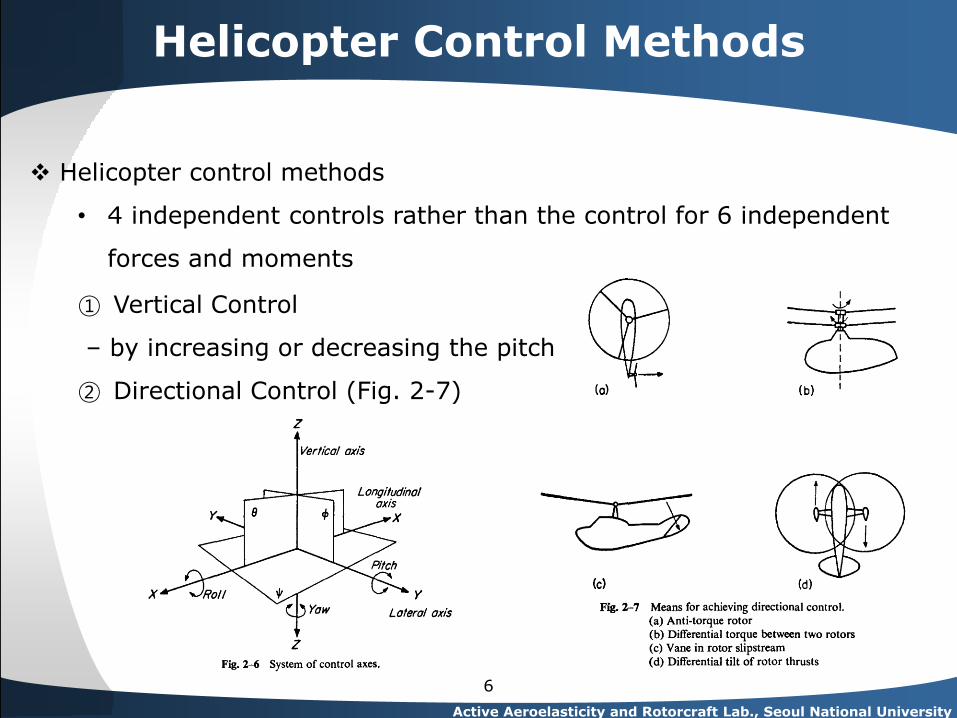
Helicopter control methods
• 4 independent controls rather than the control for 6 independent
forces and moments
① Vertical Control
– by increasing or decreasing the pitch
② Directional Control (Fig. 2-7)
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
7
Helicopter Control Methods
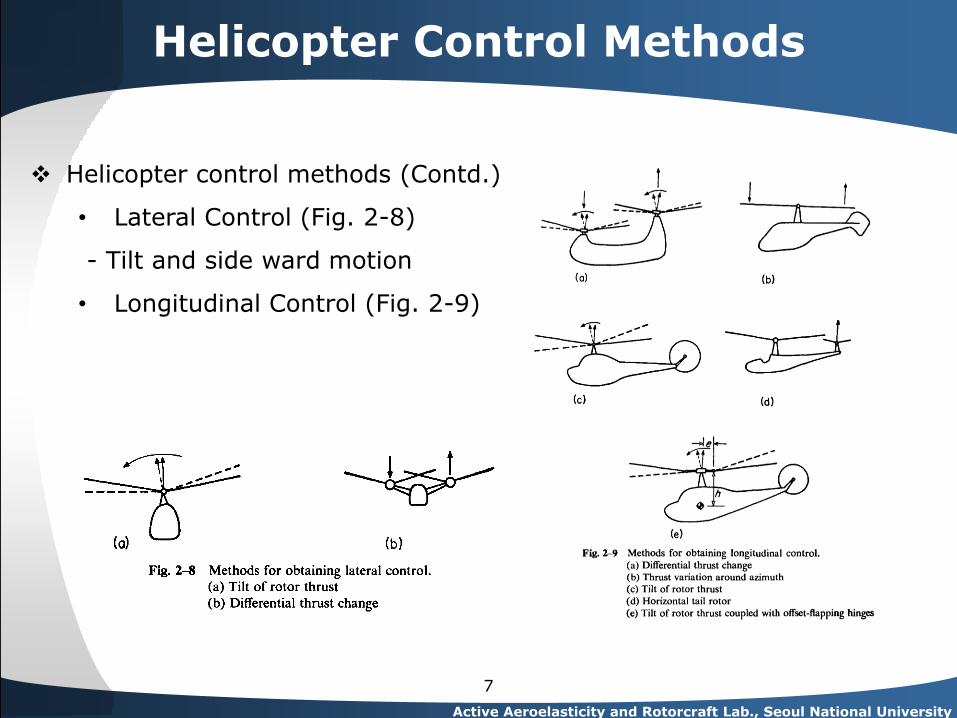
Helicopter control methods (Contd.)
• Lateral Control (Fig. 2-8)
- Tilt and side ward motion
• Longitudinal Control (Fig. 2-9)
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
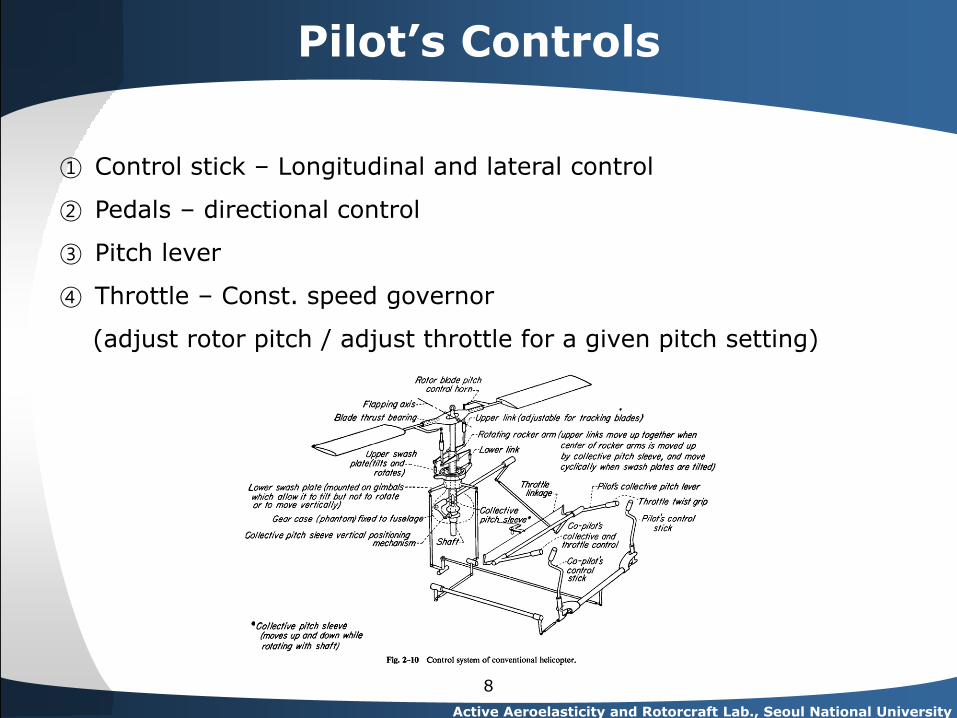
Pilot’s Controls
① Control stick – Longitudinal and lateral control
② Pedals – directional control
③ Pitch lever
④ Throttle – Const. speed governor
(adjust rotor pitch / adjust throttle for a given pitch setting)
8
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
9
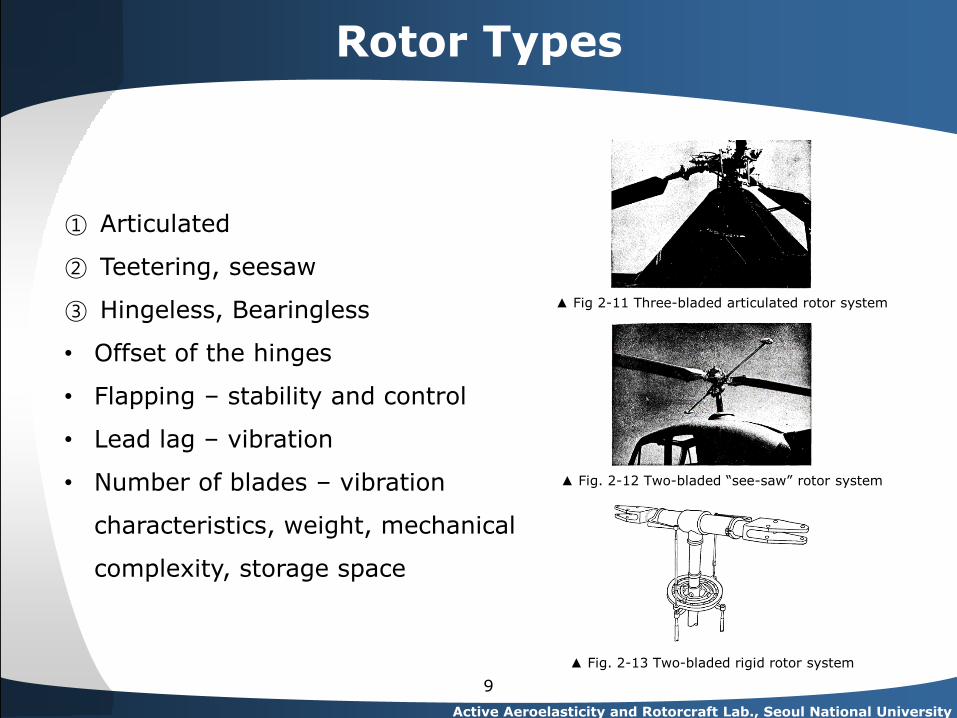
Rotor Types
① Articulated
② Teetering, seesaw
③ Hingeless, Bearingless
• Offset of the hinges
• Flapping – stability and control
• Lead lag – vibration
• Number of blades – vibration
characteristics, weight, mechanical
complexity, storage space
▲ Fig 2-11 Three-bladed articulated rotor system
▲ Fig. 2-12 Two-bladed “see-saw” rotor system
▲ Fig. 2-13 Two-bladed rigid rotor system
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
10
Mechanics of Rotor Control
① Producing moments about the rotor hub
② 2. Tilting the resultant rotor lift vector
③ 3. Combination of both
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
11
Mechanics of Rotor Control
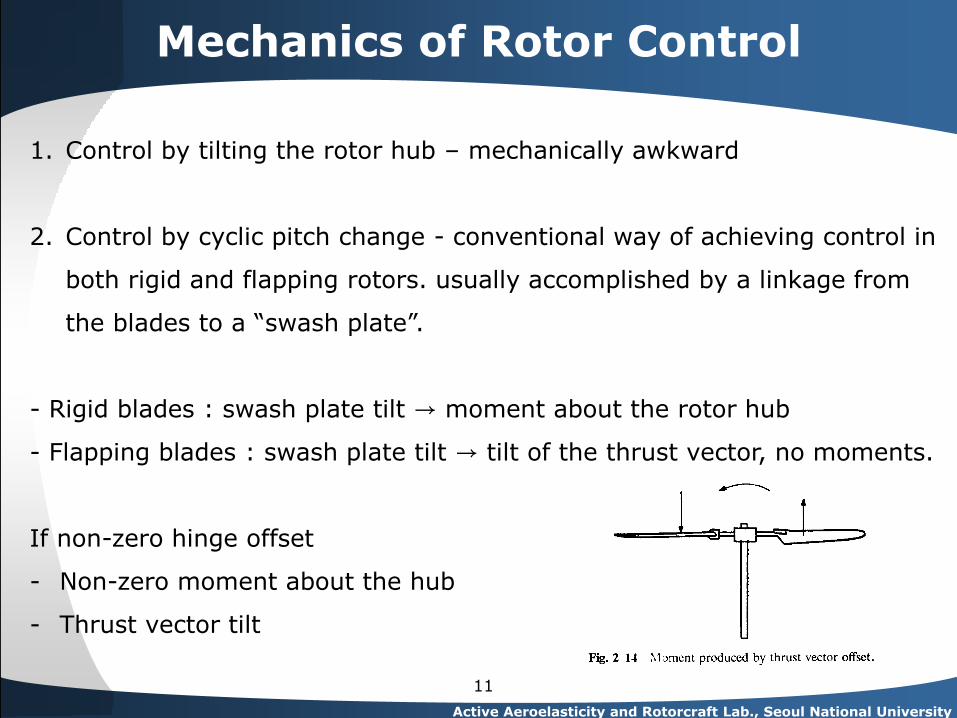
1. Control by tilting the rotor hub – mechanically awkward
2. Control by cyclic pitch change - conventional way of achieving control in
both rigid and flapping rotors. usually accomplished by a linkage from
the blades to a “swash plate”.
- Rigid blades : swash plate tilt → moment about the rotor hub
- Flapping blades : swash plate tilt → tilt of the thrust vector, no moments.
If non-zero hinge offset
- Non-zero moment about the hub
- Thrust vector tilt
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
12
Mechanics of Rotor Control
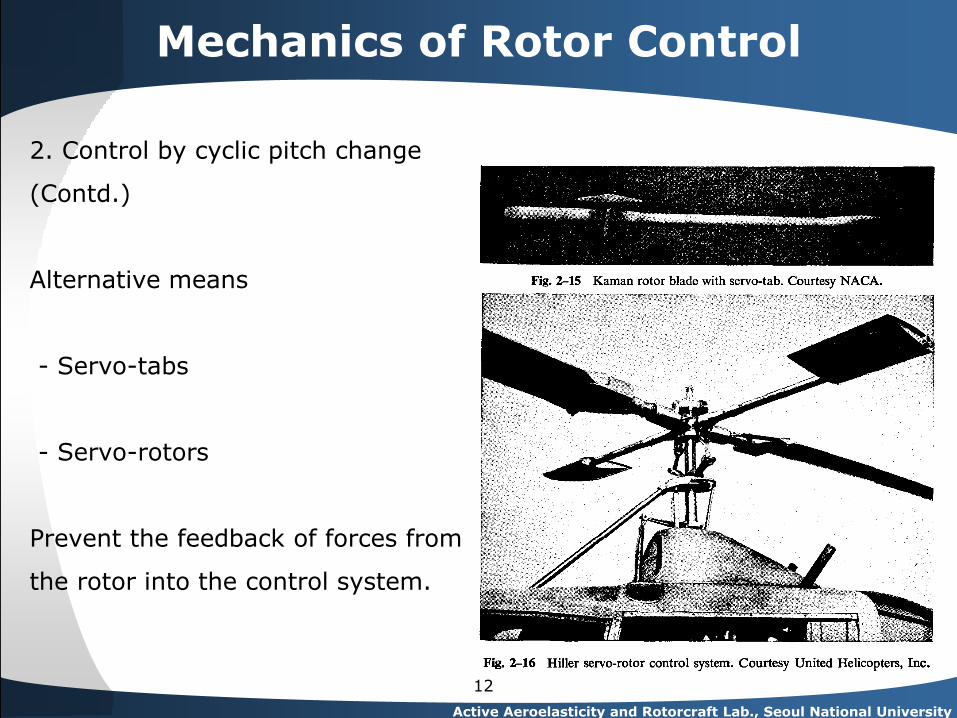
2. Control by cyclic pitch change
(Contd.)
Alternative means
- Servo-tabs
- Servo-rotors
Prevent the feedback of forces from
the rotor into the control system.
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
13
Conventional Helicopter Design Features
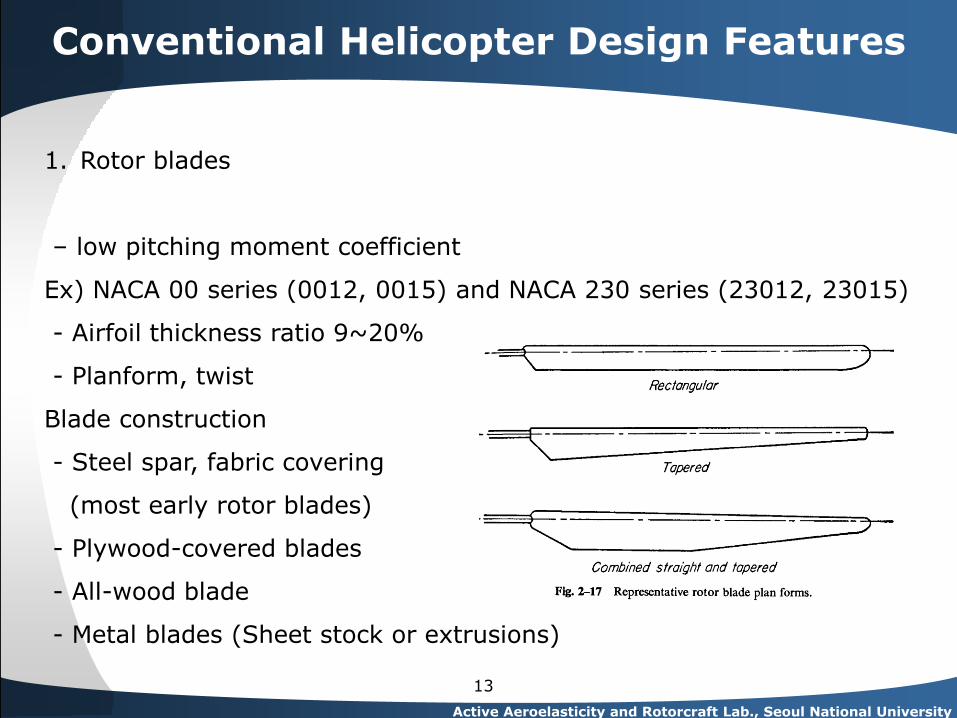
1. Rotor blades
– low pitching moment coefficient
Ex) NACA 00 series (0012, 0015) and NACA 230 series (23012, 23015)
- Airfoil thickness ratio 9~20%
- Planform, twist
Blade construction
- Steel spar, fabric covering
(most early rotor blades)
- Plywood-covered blades
- All-wood blade
- Metal blades (Sheet stock or extrusions)
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
14
2. Rotor hubs
- Forged from steel or dural
3. Rotor control linkages
- Linkages are arranged to minimize 𝛿3(pitch-flap) and 𝛿4(pitch-lag) coupling
4. Control system
- Stick motion 1” → cyclic pitch change 1~2º
Side by side – swash plate may be free to tilt only in a fore and aft.
→ lateral control
Some for longitudinal control in tandem configuration
Conventional Helicopter Design Features
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
15
5. Fuselage design – several factors (5)
6. L/G – shock absorber → softer action in landing, provide damping for
ground resonance, Loading angle be sufficient to permit high pitch-
up attitude
7. Transmission systems – engine and rotor 10:1, planetary gear train,
bevel gear, clutch, free-wheeling unit
Conventional Helicopter Design Features
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
16
Flight characteristics of the helicopter
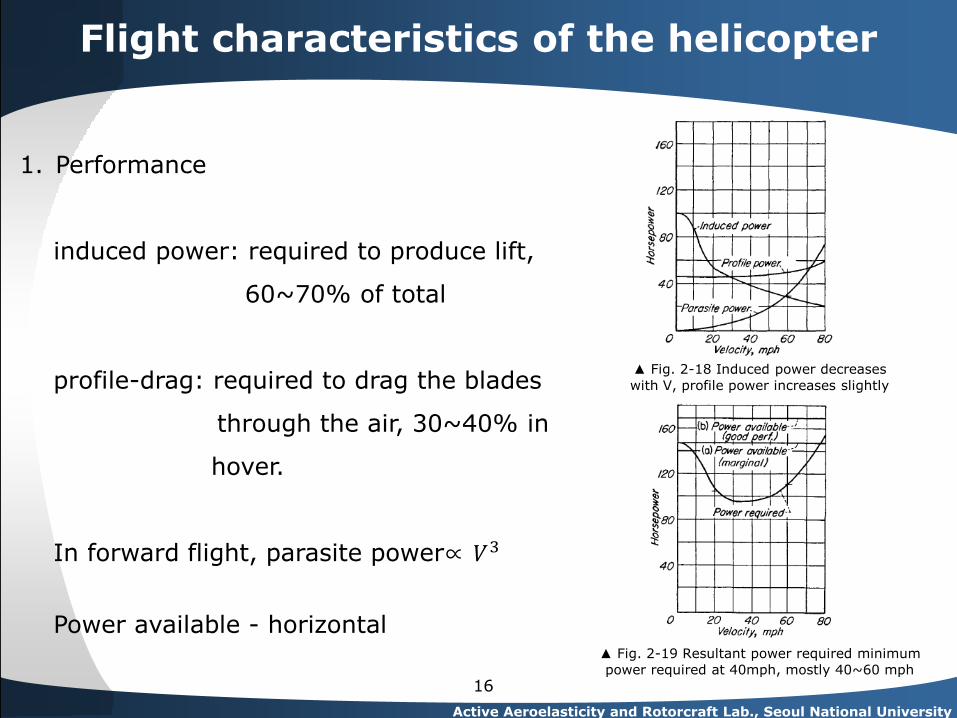
1. Performance
induced power: required to produce lift,
60~70% of total
profile-drag: required to drag the blades
through the air, 30~40% in
hover.
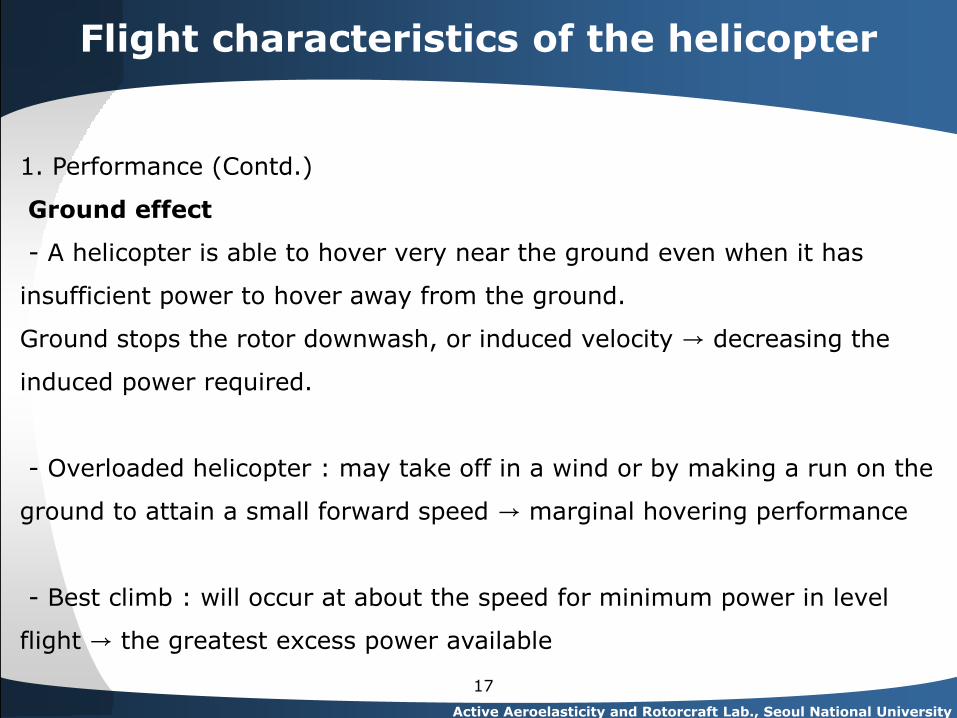
In forward flight, parasite power∝ 𝑉3
Power available - horizontal
▲ Fig. 2-18 Induced power decreases
with V, profile power increases slightly
▲ Fig. 2-19 Resultant power required minimum
power required at 40mph, mostly 40~60 mph
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
17
1. Performance (Contd.)
Ground effect
- A helicopter is able to hover very near the ground even when it has
insufficient power to hover away from the ground.
Ground stops the rotor downwash, or induced velocity → decreasing the
induced power required.
- Overloaded helicopter : may take off in a wind or by making a run on the
ground to attain a small forward speed → marginal hovering performance
- Best climb : will occur at about the speed for minimum power in level
flight → the greatest excess power available
Flight characteristics of the helicopter
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
18
1. Performance (Contd.)
Ground effect (Contd.)
- Top speed in level flight : reductions in fuselage drag by “cleaning up”
the fuselage are far more effective
- Blade stall : causes vibration of the helicopter and controls or
considerable increase in profile drag power
- Compressibility effect : advancing side → limit in forward speed 200mph
- Vertical descent : the rotor is about as effective as a parachute of the
same diameter
Flight characteristics of the helicopter
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
19
2. Control forces
- Stick forces rather than stick displacement, but do not arise from straight
forward sources on an airplane
3. Vibration characteristics
- Even multiples of the No. of the blades
reduction of input forces → blade design
natural frequencies of the fuselage → avoiding natural freq
4. Ground resonance
- Coupling between blade lag motion in the rotating frame or
sideward or fore/aft motion of the shaft
→ destructive
Flight characteristics of the helicopter
Active Aeroelasticity and Rotorcraft Lab., Seoul National University
20
5. Stability characteristics
- high control sensitivity in roll → short-period, pilot-induced lateral
oscillation, due to low rotor damping
Sluggish in response to a sudden control deflection → due to the mass of
the helicopter.
Dynamically unstable in hovering & dynamically unstable in pitch in forward
flight, but mild
→ due to low rotor damping, angle-of-attack instability
Flight characteristics of the helicopter