competitive genetic algorithms with application to reliability optimal design
TRANSCRIPT
Competitive genetic algorithms with applicationto reliability optimal design
C.K. Dimou, V.K. Koumousis*
Institute of Structural Analysis and Aseismic Research, National Technical University of Athens, Athens, Greece
Abstract
Competition is introduced among the populations of a number of genetic algorithms (GAs) having different sets of parameters. The aim is
to calibrate the population size of the GAs by altering the resources of the system, i.e. the allocated computing time. The co-evolution of the
different populations is controlled at the level of the union of populations, i.e. the metapopulation, on the basis of statistics and trends of the
evolution of every population. Evolution dynamics improve the capacity of the optimization algorithm to find optimum solutions and results
in statistically better designs as compared to the standard GA with any of the fixed parameters considered. The method is applied to the
reliability based optimal design of simple trusses. Numerical results are presented and the robustness of the proposed algorithm is discussed.
q 2003 Elsevier Ltd. All rights reserved.
Keywords: Structural optimization; Genetic algorithms; Competition; Population dynamics; Reliability analysis
1. Introduction
Genetic algorithms (GAs) are search algorithms based
on the concepts of natural selection and survival of the
fittest. They guide the evolution of a set of randomly
selected individuals towards good near optimal and/or
optimal solutions. This is accomplished in a number of
generations that are subjected to successive reproduction,
crossover and mutation, based on the statistics of the
generation. The efficiency of the whole process is
problem dependent and relies heavily on the successful
selection of a number of parameters, such as population
size, probability of crossover and mutation, type of
crossover, etc. In this work, a method is proposed that
attempts to automate the evolution of population size
through an adaptive process. This is based on
the competition of populations, with different sets of
GA parameters, struggling for the available resources of
the system.
Competition among different populations is common in
natural systems. Populations evolve by adapting them-
selves to the environment where resources are limited.
The process starts with the generation of number of
populations with different sets of GA parameters. In
subsequent generations, as the populations evolve, a
scheme of competing populations (CP) alters the popu-
lation size in an adaptive manner based on the relative
performance of the populations at the metapopulation
level. By altering the available resources, competition is
activated forcing the system to organize better its overall
search strategy towards optimal solutions. The ability of
every population to adapt to the artificial habitat is used to
calculate the relative performance index at a particular
generation, which represents a comparative measure
between all the populations that comprise the metapopula-
tion. Competition arises when the available resources are
insufficient to sustain the entire metapopulation. This
causes conflicts among the populations where the most-fit
ones survive, whereas the less-fit populations shrink or
become extinct. This coupled scheme manages to arrive at
good near optimal solutions statistically faster, as
compared to the same number of standard GAs with
fixed parameters.
Reliability optimal structural design problems are
computationally intensive and represent a particular class
of optimization problems. Therefore, application of the
proposed algorithm to this class of problems is expected
to reveal the particular features of the algorithm. The
method is applied to the reliability based optimal design
(RBOD) of simple trusses. Numerical results are presented
illustrating the advantages of the proposed method, as
0965-9978/$ - see front matter q 2003 Elsevier Ltd. All rights reserved.
doi:10.1016/S0965-9978(03)00101-7
Advances in Engineering Software 34 (2003) 773–785
www.elsevier.com/locate/advengsoft
* Corresponding author. Fax: þ30-2107721651.
E-mail address: [email protected] (V.K. Koumousis).

compared to the same number of standard GAs with fixed
parameters.
2. Genetic algorithms
A simple genetic algorithm (GA) based on binary coding
is employed for every population [1]. No mixing among
individuals of different populations is allowed, to preserve
the characteristics of the populations. Reproduction is based
on a ranking scheme [2],while elitism is adopted [3] allowing
the pair of best individuals to reappear in the next generation.
GAs are used in a wide range of structural optimization
problems [4,5]. One-point and two-point crossover schemes
are used. For the probability of mutation, decreasing
functions with the number of generations are implemented.
For every generation the entire system operates at two levels,
i.e. the level of populations and the level of metapopulation
[6], where all decisions about the characteristics of the next
generation of populations are made.
The optimal structural design problem is usually for-
mulated in non-linear mathematical programming form as
min CijðxÞ
Subject gkðxÞ # 0 k ¼ 1;…;Nc
where x [ Dn
ð1Þ
whereCijðxÞ is the objective function for the ith individual ofthe jth population, gkðxÞ is the kth inequality constraint, Nc is
the number of constraints, x is the vector of design variables
and Dn is the design space. An equivalent unconstrained
maximization problem is determined following a penalty
function formulation as
maxx[Dn
fijðxÞ ¼A
CijðxÞ þX
Nc
k¼1
ckTðgðxÞÞ" #
8
>
>
>
>
<
>
>
>
>
:
9
>
>
>
>
=
>
>
>
>
;
ð2Þ
where ck is the penalty factor associated with the kth
constraint of the problemwhich in this studywas taken as 100
for all constraints, A is an arbitrary constant and operator T is
given as
TðxÞ ¼ffiffiffiffiffiffiffi
x2 1p
x . 1
0 x # 1
(
ð3Þ
where 1 is the tolerance in violating the constraints.
Throughout this study 1 ¼ 0:1:
The maximization problem of Eq. (2) is appropriately
normalized at the metapopulation level as follows
maxx[Dn
f̂ijðxÞ ¼fijðxÞ
½mini;j
fijðxÞ�
8
<
:
9
=
;
ð4Þ
where mini;j {fijðxÞ} is the objective of the less-fit individualin all populations.
Moreover, the probability of mutation at a given
generation t is given as
Ptmut ¼
Pinit t# tinit
PfinalþðPinit2PfinalÞexp 2t2 tinit
nhalf
�� �
t. tinit
8
>
<
>
:
ð5Þ
where Pinit and Pfinal is the initial and final mutation
probability, respectively, tinit is the generation when the
mutation probability starts to vary and nhalf is the parameter
that controls the velocity of the variation of the mutation
probability. Throughout this study these parameters have
the fixed values: tinit ¼ 10 and nhalf ¼ 40:
3. Competition
Competition is common in natural systems. Dimitrova
and Vitanov [7] study the evolution of CPs through
adaptation in a non-linear dynamical system with limited
resources. In the book edited by Hanski and Gilpin [8], Nee
et al. present the important parameters of interaction among
different populations in a natural environment. Co-evolving
populations of different species share the environment in a
state of dynamic equilibrium. Competition among different
species arises when they share the same resources, which
are not sufficient to sustain all the populations.
3.1. Resources
Assuming the computational time needed to process a
single design as constant, the amount of resources required
Rreq; to process all the populations of the metapopulation
consisting of N designs at a specific generation is given as
Rreq ¼X
Np
j¼1
RjNj N ¼X
Np
j¼1
Nj ð6Þ
where Rj and Nj are the resources per individual and the total
number of individuals of the jth population, respectively,
and Np is the number of populations in the system. The
amount of available resources at generation t can be
represented by a step like function with initial resources R
Ravail ¼ R2X
m
j¼1
Hðt2 tjÞDRj ð7Þ
where m specifies the number of changes of the step-like
function at particular instances, i.e. at generation ti with
reduction of resources DRi; and H is the Heaviside function.
If the available resources are less than the required ones,
conflict is introduced into the system. Abrupt changes on
the available resources correspond to drastic events in
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785774

the virtual environment that are expected to accelerate the
adaptation of the CPs.
3.2. Fitness
The fitness of a population, in the metapopulation level,
depends not only on the particular characteristics of its
individuals but also on the profiles of all the other
populations. Co-evolution defines the concurrent evolution
of two or more populations where the fitness of a population
depends also on the profiles of the remaining populations.
Ficisi and Pollack [9] examine co-evolutionary algorithms
from game theory viewpoint. Barbosa and Barreto [10]
implement an interactive co-evolutionary GA in a graph
layout problem. Riechmann [11] shows that in economics,
where the fitness of a strategy is directly related to the
adopted strategies of the remaining individuals, every GA is
also a dynamic game. The fitness of a population in the
metapopulation level can be expressed as the sum of the
fitness of its individuals:
Fj ¼X
Nj
i¼1
f̂ijðxÞ ð8Þ
This expresses co-operation among individuals of the same
population, which is common in natural systems and favors
the expansion and survival of larger populations and of
populations with many ‘good’ individuals.
3.3. Diversity
The goal at this stage is to introduce a more stringent
approach, as compared to the GA, that will process the
emerging data and guide the next steps in an adaptive
manner, while taking into account the uncertainties of the
system. Diversity plays an important role for the GA to
improve the existing best solutions [12,14]. Therefore, a
diversity measure Dj of the chromosome of every
population j is evaluated, based on descriptive statistics of
the digits appearing at every position of the chromosome.
Diversity is used as an estimate of the ‘age’ of a population.
‘Younger’ populations exhibit higher diversity as compared
to ‘older’ ones and thus, they appear more promising to
improve further the existing elite solution than ‘older’ ones.
This factor is important in preserving the capacity of the
metapopulation in finding the global optimum [13,14].
Considering that the digits at every position of the
chromosome follow a binomial distribution, their variation
at a specific generation is given as
Var ½ fjm � ¼ Nj·p·ð12 pÞ ð9Þ
where fjm is the population of digits of the jth population at
themth position and p is the probability of occurrence of 1 at
the mth digit. When this probability is equal to 0.5 the
variation takes its maximum value of Nj=4: The diversity
measure over the length of the chromosome is calculated as
the average of the variation at all positions of the
chromosome and is given as
Dj ¼ Em¼1;…;k
{Var ½ fjm �} ð10Þ
where k is the length of the chromosome.
3.4. Relative performance
The fitness of the fittest individual Bj is introduced as an
additional parameter to measure the relative performance of
the populations. The relative performance index of the jth
population PIj; is expressed as the product of the fitness of
its best individual, the population fitness and the population
diversity
PIj ¼ ½Bj�w½Fj�a½Dj�b ð11Þ
where w; a and b are parameters, used to attenuate or
intensify relative variations among the populations. This
expression of relative performance index constitutes a
comparative measure of the performance of a population. In
this analysis a ¼ 1: Expressions like the one presented in
Eq. (11) are frequently used in econometric models [15,16].
4. Engagement rules
4.1. Conflict
The probability of conflict among two different popu-
lations i and j; when shortage of resources is observed, is
given as
Pr½popi; popj� ¼ �TDN
N
� �
PIi 2 PIj
PIiOFi . OFj
0 OFi # OFj
8
>
<
>
:
9
>
=
>
;
DN ¼ðRreq 2 RavailÞE½Nj�
E½RjNj�; ð12Þ
�T½x� ¼
0 x , 0
x
d0 # x # d
1 x . d
8
>
>
>
<
>
>
>
:
where d is a parameter controlling the transition from a state
of no conflict to a state of conflict emerging between two
populations, when lack of resources exists. In this analysis
d ¼ 0:2: This relation assures that no conflict arises if the
available resources are adequate. Moreover, the probability
of conflict increases in proportion to the resource deficit,
while stronger populations fight only weaker ones. The
probability of conflict between two CPs increases linearly
with the relative difference of their performance index. For
every population only one conflict per generation is
allowed. Further details that concern the scheme used
for the selection of conflicting pairs are presented in
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785 775

the pseudocode description of the algorithm. Finally,
conflicts cease when the available resources are adequate.
The outcome of a conflict between populations i and j;
determines the size of these populations in the next
generation as follows
N tþ1i ¼ N t
i þ ��T eijPIi 2 PIJ
PIi
�
N tþ1j ¼ N t
j þ ��T1
eij12
PIi 2 PIJ
PIi
�
" # ð13Þ
where ��T is given as
��TðxÞ ¼
max gDN
Np
; 2
( )
0:5þ f , x
0 0:5 # x , 0:5þ f
2max gDN
Np
; 2
( )
0:52 f # x , 0:5
2max g2DN
Np
; 4
( )
x , 0:52 f
8
>
>
>
>
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
>
>
>
>
:
ð14Þ
and eij is equal to
eij ¼ 1þeðrand2 0:5Þ
0:5ð15Þ
where e and f are parameters that handle the fuzziness of the
outcome. For this analysis e ¼ 0:2 and f ¼ 0:2: Further-
more, the g factor is used to regulate the velocity of
variation of the size of population. Typical values of g factor
are around unity [17]. Furthermore, populations vanish if
their population size drops to zero.
4.2. Termination criteria
A convergence criterion is introduced that works as a
trade-off between the variability of the population and the
coefficient of Variation (COV) of the objective function.
The variability factor measures the variability of schemata
per design variable in the chromosome. This is calculated as
the average of the variability factor of all design variables
of the problem. Convergence of results and termination of
the evolution of a particular population is considered when
the variability factor is less than 30% and the COV less than
5%. Moreover a hard termination criterion of the GA
optimization process is applied after 250 generations, which
depends on the particular problem. For the problem
addressed in this paper, most of the populations converge
following the first criterion and very rarely the hard
termination criterion was activated.
Therefore, the proposed scheme at the level of
metapopulation is based on the introduction of diversity
measure given in Eq. (10), obtained from formal
descriptive statistics on the different schemata of the
population, the implementation of the conflict scheme and
the fuzzy outcome of the conflict between pairs of
populations.
The proposed algorithm is briefly presented as follows.
4.3. Pseudocode of the proposed algorithm
† Step 0: Start process. Read data for the competition
scheme used in Eqs. (5)–(15). Read parameters for the
GAs (reproduction scheme, type of crossover, prob-
ability of crossover and probability of mutation) for all
populations i ¼ 1;…;Np: Specify the population size N ti
of every population. Read parameters of termination
criteria.
† Step 1: Set t ¼ 0: Generate random initial populations
for all populations ðNpÞ: Evaluate fitness for all designs,
i.e. for i ¼ 1;…;Np and j ¼ 1;…;N ti call the RBOD code
and calculate the fijðxÞ: Perform the statistics of all
populations ðNpÞ:† Step 2:Operate on the metapopulation level to decide for
the new population size of all populations. Calculate the
normalized fitness fijðxÞ using Eq. (4).
† Step 3: Decide about conflict. Calculate the required and
available resources using Eqs. (6) and (7). If Np ¼ 1 or
Rreq ¼ Ravail set Ntþ1i ¼ N t
i for i ¼ 1;…;Np then go to
Step 7 else; if Rreq , Ravail go to Step 6 else go to Step 4.
† Step 4: Calculate the performance index of every
population using Eqs. (8)–(11) and store it in a vector
{A} in a sorted form.
† Step 5: Assign the pairs of possible conflict. Select
the strongest population {Popi} from vector {A}: For
Fig. 1. Statically determinate truss (loads and members).
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785776
the remaining populations assign selection probabilities
based on a ranking.
† Step 5.1: Select randomly the ‘weak’ population {Popj}:
Calculate the probability of conflict between {Popi} and
{Popj} using Eq. (12). If Pr½Popi;Popj� $ randð Þ then
assign populations i and j as pair of conflicting
populations and remove their indexes from vector {A}
otherwise remove only {Popi}: If {A} contains more than
one populations then go to Step 5 else,
† Step 5.2: For all pairs of conflicting populations calculate
the N tþ1i ; i ¼ 1;…;Np using Eqs. (13)–(15). For the
remaining populations N tþ1i ¼ N t
i : Go to Step 7.
† Step 6: Distribute the resources in surplus evenly across
the evolving populations and calculate the corresponding
N tþ1i ; i ¼ 1;…;Np:
† Step 7: Set t ¼ t þ 1: For i ¼ 1;…;Np and j ¼ 1;…;N ti
call the standard GA routine using the new population
size for all the populations and calculate the fitness fijðxÞof all the designs calling the RBOD code. Perform the
statistics of all populations.
† Step 8: Check for convergence for all populations. For
all populations i ¼ 1;…;Np check for the satisfaction of
termination criteria. Freeze the available resources
(resources cannot be re-allocated) for populations that
satisfy the termination criteria. UpdateNp: IfNp – 0 then
go to Step 2 else go to Step 9.
† Step 9: End process.
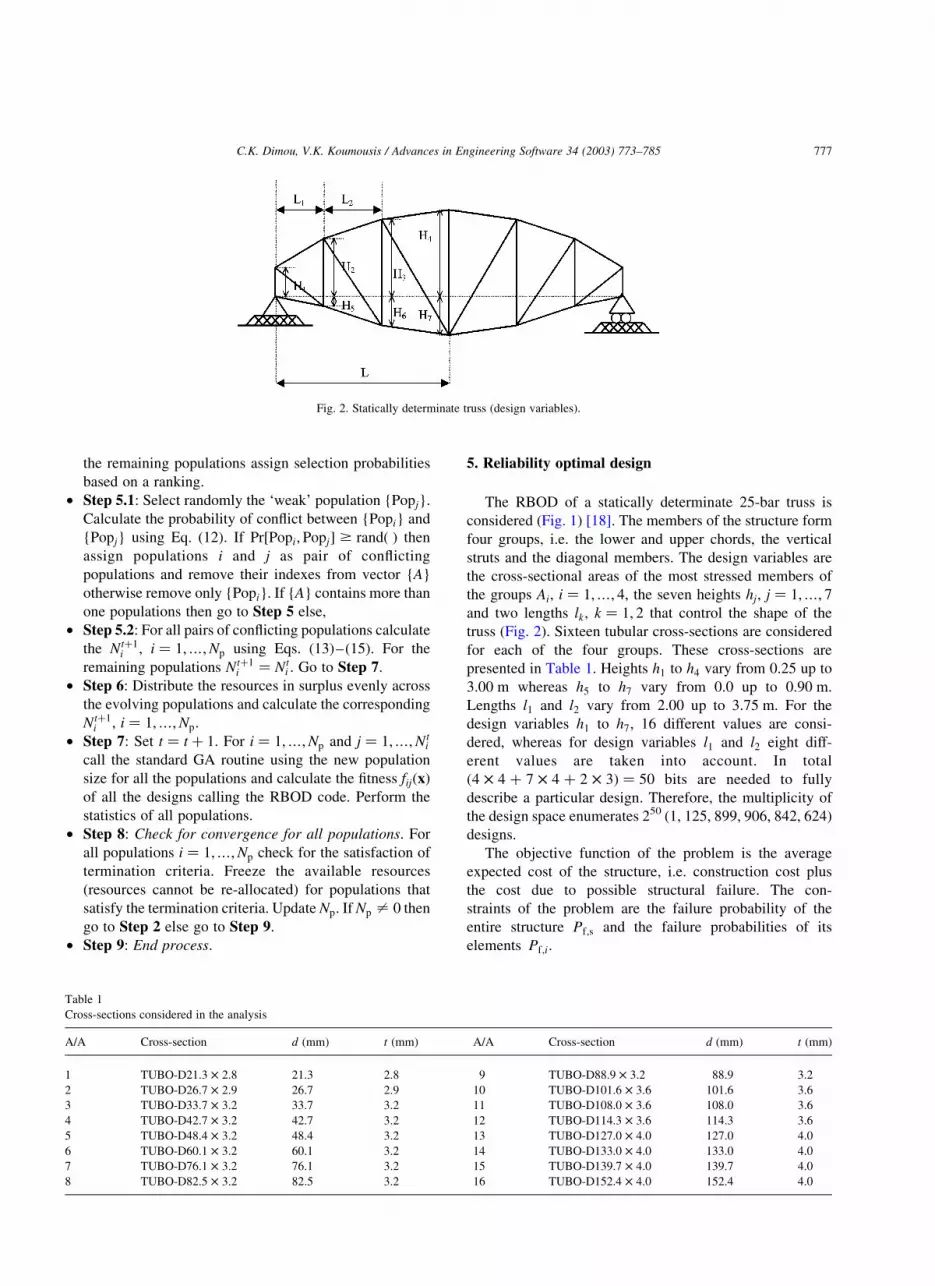
5. Reliability optimal design
The RBOD of a statically determinate 25-bar truss is
considered (Fig. 1) [18]. The members of the structure form
four groups, i.e. the lower and upper chords, the vertical
struts and the diagonal members. The design variables are
the cross-sectional areas of the most stressed members of
the groups Ai; i ¼ 1;…; 4; the seven heights hj; j ¼ 1;…; 7
and two lengths lk; k ¼ 1; 2 that control the shape of the
truss (Fig. 2). Sixteen tubular cross-sections are considered
for each of the four groups. These cross-sections are
presented in Table 1. Heights h1 to h4 vary from 0.25 up to
3.00 m whereas h5 to h7 vary from 0.0 up to 0.90 m.
Lengths l1 and l2 vary from 2.00 up to 3.75 m. For the
design variables h1 to h7; 16 different values are consi-
dered, whereas for design variables l1 and l2 eight diff-
erent values are taken into account. In total
(4 £ 4 þ 7 £ 4 þ 2 £ 3) ¼ 50 bits are needed to fully
describe a particular design. Therefore, the multiplicity of
the design space enumerates 250 (1, 125, 899, 906, 842, 624)
designs.
The objective function of the problem is the average
expected cost of the structure, i.e. construction cost plus
the cost due to possible structural failure. The con-
straints of the problem are the failure probability of the
entire structure Pf;s and the failure probabilities of its
elements Pf;i:
Table 1
Cross-sections considered in the analysis
A/A Cross-section d (mm) t (mm) A/A Cross-section d (mm) t (mm)
1 TUBO-D21.3 £ 2.8 21.3 2.8 9 TUBO-D88.9 £ 3.2 88.9 3.2
2 TUBO-D26.7 £ 2.9 26.7 2.9 10 TUBO-D101.6 £ 3.6 101.6 3.6
3 TUBO-D33.7 £ 3.2 33.7 3.2 11 TUBO-D108.0 £ 3.6 108.0 3.6
4 TUBO-D42.7 £ 3.2 42.7 3.2 12 TUBO-D114.3 £ 3.6 114.3 3.6
5 TUBO-D48.4 £ 3.2 48.4 3.2 13 TUBO-D127.0 £ 4.0 127.0 4.0
6 TUBO-D60.1 £ 3.2 60.1 3.2 14 TUBO-D133.0 £ 4.0 133.0 4.0
7 TUBO-D76.1 £ 3.2 76.1 3.2 15 TUBO-D139.7 £ 4.0 139.7 4.0
8 TUBO-D82.5 £ 3.2 82.5 3.2 16 TUBO-D152.4 £ 4.0 152.4 4.0
Fig. 2. Statically determinate truss (design variables).
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785 777

The optimization problem is formulated as follows:
min FðAi; hj; lkÞ ¼X
Nt
m¼1
VmðAi; hj; lkÞCmat þ Pf;sCfail
i ¼ 1;…; 4; j ¼ 1;…; 7; k ¼ 1; 2
ð16Þ
Subject to
gjðAi; hj; lkÞ ¼Pf;j
Pj;lim
2 1:0 # 0;
gsðAi; hj; lkÞ ¼Pf;s
Ps;lim
2 1:0 # 0
ð17Þ
where Nt is the number of elements of the truss, Vm is the
volume of the mth element, Cmat and Cfail is the cost per unit
volume of the structure and the cost of a potential structural
failure, respectively, Pf;s is the overall failure probability,
Pf;j and Pj;lim are the failure probability of the jth element
and the maximum failure probability, respectively, and Pf;s
and Ps;lim are the failure probability and its limit value for
the entire structure. Two shape constraints that control the
height to length ratio are also considered. These constraints
are given as:
gs;1ðH4Þ ¼H4
2L2 0:15 # 0
gs;2ðH7Þ ¼H7
2L2 0:05 # 0
ð18Þ
The probability of failure of an element is given as
Pf;i ¼ Pr½M # 1� ð19Þ
where M is the safety margin which is expressed as follows
M ¼RðAiÞFðhiÞ
ð20Þ
where RðAiÞ and FðhiÞ are the ultimate resistance and the
applied load, respectively, given as
RðAiÞ ¼ suAi fiðhiÞ $ 0
RðAiÞ ¼ xsuAi fiðhiÞ , 0FðhiÞ ¼ fiðhiÞP ð21Þ
and fiðhiÞ are the influence coefficients that result from
the analysis of the truss for a unit load and depend on the
geometry of the structure. The parameter x reduces the
compressive strength of the members due to buckling
considerations and is based on the provisions of Eurocode 3
[19]. The load P, the ultimate yield stress su; the cross-
sectional areas Ai; and the parameter x are considered as
random variables for the problem. When these variables are
log normally distributed, an analytical solution of the failure
probability can be obtained [20]. Characteristics of these
random variables are presented in Table 2.
For a statically determinate structure, failure of one of its
elements results in failure of the entire structure. The
structure is modeled as a series system of weakly correlated
elements. Ditlevsen bounds are used to obtain estimates of
the system reliability [20,21].
From Eqs. (20) and (21), the safety margin is given as:
M¼xsuA
fP) lnðMÞ¼ lnðsuÞþ lnðAÞþ lnðxÞ2 lnðf Þ2 lnðPÞ
ð22Þ
The mean and variance of the natural logarithm of the safety
margin with respect to its components are given as:
E½lnðMÞ� ¼ E½lnðsuÞ� þE½lnðAÞ� þE½lnðxÞ�2E½lnðf Þ�2E½lnðPÞ�
V½lnðMÞ� ¼ V½lnðsuÞ� þV½lnðAÞ� þV½lnðxÞ� þV½lnðPÞ�ð23Þ
The mean and variance of the terms of Eq. (23) are given as:
V½lnðXÞ� ¼ ln
ffiffiffiffi
VX
p
E½X�þ 1
�
E½lnðXÞ� ¼ lnðE½X�Þ21
2V½lnðXÞ�
ð24Þ
Substituting Eqs. (22)–(24) into Eq. (19), the failure
probability of an element, considering that the natural
logarithm of the safety margin follows a normal distri-
bution, is given as
Pf ¼ P½M , 1� ¼ P½lnðMÞ, 0� ¼F 2E½lnðMÞ�ffiffiffiffiffiffiffiffiffiffiffiffi
V½lnðMÞ�p
�
¼Fð2bÞ ð25Þ
where b is the reliability index. The members of every
design group are considered fully correlated. In this case,
the failure probability is given as:
Pf;G ¼maxi[G
{Pf;i} ð26Þ
Substituting Eq. (25) into Eq. (26), the failure probability of
every group is given as:
Pf;G ¼maxi[G
{P½Mi , 1�}¼ P½maxi[G
{Mi}, 1�
¼F maxi[G
2E½lnðMiÞ�ffiffiffiffiffiffiffiffiffiffiffiffi
V½lnðMiÞ�p
� � �
ð27Þ
The failure probability of the structure can be obtained from
the failure probabilities of its groups. The Ditlevsen bounds
Table 2
Probabilistic data for the statistically determinate truss
Variable Distribution type Average COV (%)
Load P (kN) Lognormal 20, 30, 40 12.5
Ultimate strength (MPa) Lognormal 275.0 7.00
Cross-section (cm2) Lognormal Variable 10.0
x Parameter Lognormal Calculated 0a , 5 , 10
a Deterministic variable.
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785778

for the system’s failure probability are given as:
Pf;s #
X
n
i¼1
P½Mi , 1�2X
n
i¼2
maxj,i
P½Mi , 1>Mj , 1�
Pf;s $ P½M1 , 1� þX
n
i¼2
max
��
P½Mi , 1� ð28Þ
2
X
i21
j¼1
P½Mi , 1>Mj , 1��
;0
�
For the joint probability of events the following expression
is used:
P½Mi , 1>Mj , 1� ¼F2ð2bi;2bj;rÞ ð29Þ
For the evaluation of the joint probability of Eq. (29) the
following bounds are used [20]
maxð pi;pjÞ#P½Mi, 1>Mj, 1�, piþpj r. 0
0#P½Mi, 1>Mj, 1�,minðpi;pjÞ r, 0ð30Þ
where the parameters pi and pj are given as
pi ¼ Fð2biÞ·Fð2gjÞ pj ¼ Fð2bjiÞ·Fð2giÞ ð31Þ
and the gi and gj factors are given by the following relation:
gi ¼bi 2 rij·bj
ffiffiffiffiffiffiffiffiffi
12 r2ij
q gj ¼bj 2 rij·bi
ffiffiffiffiffiffiffiffiffi
12 r2ij
q ð32Þ
5.1. Numerical results
A number of problems are solved for L ¼ 10 m and a
ratio of costs Cfail=Cmat equal to 20,000, that corresponds to
an estimation of real costs, starting with an initial population
size of 40, 60, 80 and 100 designs. The limit probabilities
considered during the analysis are Pj;lim ¼ 1026 and Ps;lim ¼5 £ 1026: Ten runs with different random seeds are
performed to produce data for a statistical evaluation of
the proposed scheme.
Twelve different populations are considered. Their
characteristics are presented in Table 3. The available
resources vary according to the resource variation schemes
(RVS) 1, to 7 as shown in Fig. 3 associated with the
parameters of Table 4. These RVSs are classified in four
different groups namely, the decreasing ones (RVS 1 and 2),
the alternating (RVS 3 and 4), the initially increasing and
subsequently decreasing (RVS 5 and 7) and one scheme
(RVS 6) with alternating–decreasing resources, each
having the same values of b;w exponents in Eq. (11).
These parameters can be set equal to unity indicating no
preference either for the fitness of the population, or the
diversity or the fitness of the elite individual. Although
the values of the parameters presented in Table 4 are not the
optimal, they are selected on the basis of qualitative criteria
for improved performance.
For example for the decreasing RVS 1 and 2, the average
population size is expected to decrease in time and thus,
parameter b is set to a value of 5/6 bigger than parameter w
which is set to a value of 0.5 to favor the evolution of
populations that exhibit higher diversity.
The minimum cost solutions for the load case E½P� ¼ 30
kN and the x parameter considered as deterministic, random
with COV 5 and 10%, respectively, are presented in Fig. 4.
The optimal solutions forx parameter withCOV5% for three
different loads are presented in Fig. 5. In Table 5 the optimal
parameters that control the shape of the trusses are presented.
It is observed that the variation of the x parameter is not
affecting the optimal cost considerably. The shape of the truss
changes and the height to length ratio decreases as the COV
of the x parameter increases. The different average load
affects considerably the shape, the cross-section areas and the
expected cost of the optimal truss, following an almost linear
relation between the average load and the optimal cost. With
regard to the shape of the truss, an increase in the height to
length ratio is observed as the average load increases. In
addition, the l1 design variable and the sum of l1 þ l2decrease as the average load increases.
The evolution of the objective function of the best
individual for E½P� ¼ 40 kN; x parameter treated as random
variable with a COV 10% for an initial population size equal
to 80, that corresponds to RVS 1, is presented in Fig. 6.
Population 12 finds the optimal solution at generation 58
and its evolution is terminated at generation 71. Population
3 follows a path similar to that of population 12. Its
evolution is terminated at generation 58 and a near optimal
solution within 8.9% of the computed optimum is obtained
at generation 55. Population 9 converges at a non-optimal
solution, within 13.5% of the computed optimum, at
generation 88.
The evolution of the population size of the 12 different
GAs is presented in Fig. 7. Competition starts at generation
10 when the first resource reduction is imposed. For
population 12 the population size varies slightly (less than
15% of the initial population size). Similar behavior is
observed for population 9 until generation 50, where two
Table 3
GA parameters
Population 1 2 3 4 5 6 7 8 9 10 11 12
Crossover prob. 0.7 0.7 0.8 0.8 0.7 0.7 0.8 0.8 0.9 0.9 0.9 0.9
Crossover type SP SP SP SP DP DP DP DP SP SP DP DP
Mutation scheme A B A B A B A B B A B A
Scheme A: Pinit ¼ 1%; Pfinal ¼ 1‰ Scheme B: Pinit ¼ 2%; Pfinal ¼ 2‰
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785 779

significant increases of the population size are observed,
followed by small variations near the end of the optimiz-
ation process. Finally, the sharp drop observed at generation
72 is attributed to a reduction of the available resources. Due
to intense competition, populations 7 and 10 are forced to
converge prematurely at generations 37 and 53,
respectively.
In Table 6, the schemes that produced the optimal results
are presented. For the case where E½P� ¼ 30 kN and RVS 6,
the initial population size of 100 individuals produced the
best design, whereas for E½P� ¼ 40 kN and RVS 1 the initial
population size of 80 or 100 individuals suggested the best
design. For E½P� ¼ 20 kN; mixed results are observed and
in the case where x is treated as a random variable with
a COV equal to 10% the best design was obtained from the
standard GA scheme.
With regard to the probability of crossover, probability of
mutation and one- or two-point crossover schemes and for
the specific range used in this analysis, no trends favoring
a particular set of parameters are observed. Single point
crossover is used in 6 out of 9 cases as it can be easily
checked from Table 3 from the corresponding column ‘Pop-
ID’. Moreover, for the crossover probability the three
different crossover probabilities appear 4, 3 and 2 times each
for values of 0.7, 0.8 and 0.9, respectively. Mutation scheme
B is applied in 6 out of 9 cases. The number of generations
required to derive the optimum solution shows considerable
variability from a minimum of 24 generations to a
maximum of 161 generations, which are, respectively,
extended to a minimum of 29 generations and a maximum
of 218 generations until termination. Also, from the
different initial random seeds that gave the optimal results,
no trends favoring a particular seed are observed as
expected, which makes the statistics of the results valid.
A more general statistical evidence of the overall perform-
ance of the proposed algorithm is depicted in Figs. 8–11.
The minimum, maximum and average ratio of computing
time for seven different RVSs, for all problems, with respect
to the standard GA is presented in Fig. 8. Moreover,
Fig. 3. Evolution of the resource variation schemes.
Table 4
Problem parameters
Parameter b w
RVS 1 5/6 0.5
RVS 2 5/6 0.5
RVS 3 0.5 1.0
RVS 4 0.5 1.0
RVS 5 5/6 0.5
RVS 6 5/6 0.75
RVS 7 5/6 0.5
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785780

the number of problems where the proposed algorithm
outperformed the classical GA with regard to the quality of
the best design is also presented. The most computationally
expensive schemes are RVS 3 followed by RVS 4, whereas
the least computationally intensive scheme is RVS 2
followed by RVS 1. With regard to the quality of the best
design it can be observed that for all RVSs expect RVS 4 the
proposed algorithm manages to produce a better design than
the best optimal design of the std. GA in the majority of the
problems examined. The comparison of groups shows that
RVS 1 is more robust than RVS 2. Equivalently RVS 3 is
more robust than RVS 4 and RVS 7 is more robust than
Fig. 4. Optimal solutions ðE½P� ¼ 30 kNÞ:
Fig. 5. Optimal solutions (x random COV equal to 5%).
Table 5
Optimal values of the shape variables (m)
Design h1 h2 h3 h4 h5 h6 h7 l1 l2
a 1.00 1.50 1.85 2.00 0.0225 0.25 0.425 3.5 3.25
b 0.90 1.30 1.425 1.475 0.0 0.275 0.575 3.0 3.75
c 0.80 1.20 1.30 1.375 0.275 0.575 0.80 3.25 3.75
d 1.00 1.40 1.80 2.025 0.025 0.20 0.45 3.5 3.5
e 0.90 1.30 1.425 1.475 0.0 0.275 0.575 3.0 3.75
f 1.30 1.80 2.30 2.65 0.0125 0.10 0.325 2.75 3.50
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785 781

Fig. 7. Evolution of the size of the population (E½P� ¼ 40 kN; (x RV 10%)).
Table 6
Schemes that produced the optimal results
Case Scheme Pop size Pop ID Gen-opt Gen-term Seed
20 kN x; Deta RVS 3 80 4 161 218 2
x; RVb 5% RVS 4 80 5 46 51 9
x; RV 10% GA 60 3 69 94 2
30 kN x; Det RVS 4 100 2 49 67 4
x; RV 5% RVS 6 100 9 63 63 4
x; RV 10% RVS 6 100 8 121 122 8
40 kN x; Det RVS 1 100 2 95 100 4
x; RV 5% RVS 1 80 6 24 33 1
x; RV 10% RVS 1 80 12 58 71 7
a Det, deterministic variable.b RV, random variable.
Fig. 6. Evolution of the objective function (E½P� ¼ 40 kN; (x RV 10%)).
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785782

RVS 5. Moreover, RVS 3 managed to outperform the
classical GA in all problems, but one, whereas very good
results are also observed for RVS 6 and RVSs 1 and 7.
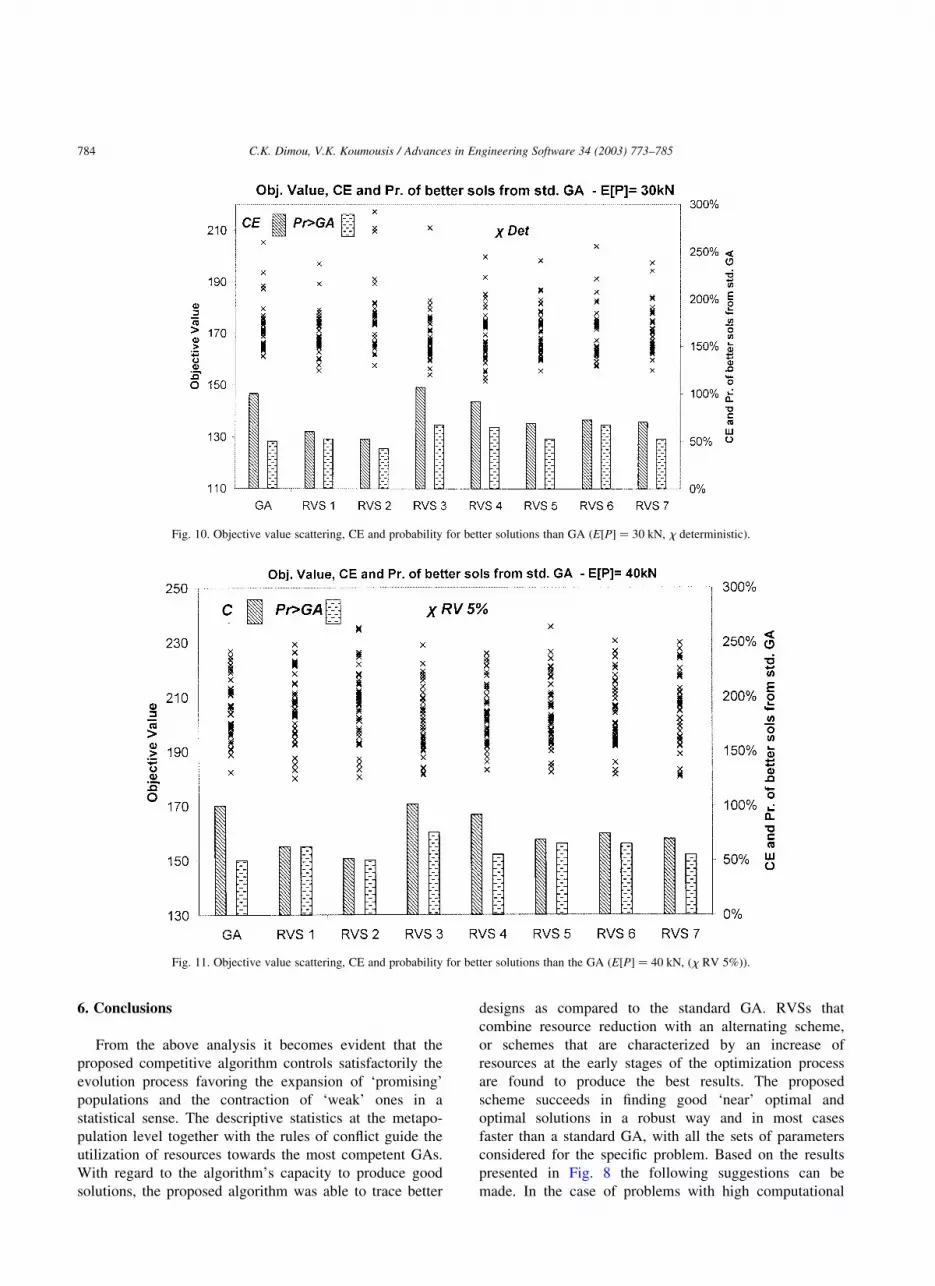
Scattering of the cost for the various RVSs is
presented in Figs. 9–11. In addition, the computational
efficiency (CE) as compared to the standard GA and the
probability of obtaining better solutions than the GA are
presented, for different values of the average load and x
parameter.
In Fig. 9, for resource variation schemes RVS 3 to RVS 6,
the probability to obtain better solutions than the standard
GA, is greater than 50% with a maximum of 72.5% for
RVS 4. The probability for RVS 1 is equal to 50% and thus,
the quality of results is equivalent to those of the GA but
these results are obtained in considerably less time (62% of
the computational time of the standard GA).
From these results it is observed that moderate reduc-
tions of the resources are expected to maximize the
performance of the algorithm. Moreover, schemes exhibit-
ing an increase of available resources at the early stages of
the optimization process, such as RVSs 5 and 7 are expected
to produce statistically better results.
Fig. 8. Average, minimum and maximum values of CE and frequency of surpassing the best design of the std. GA.
Fig. 9. Objective value scattering, CE and probability for better solutions than GA (E½P� ¼ 20 kN; (x RV 10%)).
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785 783
6. Conclusions
From the above analysis it becomes evident that the
proposed competitive algorithm controls satisfactorily the
evolution process favoring the expansion of ‘promising’
populations and the contraction of ‘weak’ ones in a
statistical sense. The descriptive statistics at the metapo-
pulation level together with the rules of conflict guide the
utilization of resources towards the most competent GAs.
With regard to the algorithm’s capacity to produce good
solutions, the proposed algorithm was able to trace better
designs as compared to the standard GA. RVSs that
combine resource reduction with an alternating scheme,
or schemes that are characterized by an increase of
resources at the early stages of the optimization process
are found to produce the best results. The proposed
scheme succeeds in finding good ‘near’ optimal and
optimal solutions in a robust way and in most cases
faster than a standard GA, with all the sets of parameters
considered for the specific problem. Based on the results
presented in Fig. 8 the following suggestions can be
made. In the case of problems with high computational
Fig. 10. Objective value scattering, CE and probability for better solutions than GA (E½P� ¼ 30 kN; x deterministic).
Fig. 11. Objective value scattering, CE and probability for better solutions than the GA (E½P� ¼ 40 kN; (x RV 5%)).
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785784

cost RVS 1 can be used, since it combines low
computational cost with increased robustness. For
problems where computational cost is not of major
importance RVS 3 can be used since at a small
additional cost the robustness is increased by a factor
of 8. Moreover, RVSs 6 and 7 present also good
alternatives since they combine smaller computational
cost with increased performance.
References
[1] Goldberg DE. Genetic algorithms in search, optimization, and
machine learning. Reading, MA: Addison-Wesley; 1989.
[2] Pezeshk S, Camp CV, Chen D. Design of non-linear framed structures
using genetic optimization. J Struct Engng 2000;126(3):382–8.
[3] Koumousis VK, Georgiou PG. Genetic algorithms in discrete
optimization of steel truss roofs. J Comput Civil Engng 1994;8(3):
309–25.
[4] Grierson DE, Pak WH. Optimal sizing, geometrical and topological
design using genetic algorithms. J Struct Optim 1993;6:151–9.
[5] Hajela P, Lee E. Genetic algorithms in truss topological optimization.
J Solids Struct 1995;32(22):3341–57.
[6] Levins R. Some demographic and genetic consequences of environ-
mental heterogeneity for biological control. Bull Entomol Soc Am
1969;15:237–40.
[7] Dimitrova ZI, Vitanov NK. Influence of adaptation on the nonlinear
dynamics of a system of competing populations. Phys Lett A 2000;
272:368–80.
[8] Hanski IA, Gilpin ME, editors. Metapopulation biology. New York:
Academic Press; 1997.
[9] Ficici SG, Pollack JB. Game Theory and the simple coevolutionary
algorithm: some preliminary results on fitness sharing. Genetic and
Evolutionary Computation Conference, Workshop Program
(GECCO-2001); 2001. p. 2–8.
[10] Barbosa HJC, Barreto AMS. An interactive genetic algorithm with co-
evolution of weights for multiobjective problems. Proceedings of the
Genetic and Evolutionary Computation Conference (GECCO-2001);
2001. p. 203–10.
[11] Riechmann T. Genetic algorithm learning and evolutionary games.
J Econ Dyn Control 2001;25:1019–37.
[12] Shimodaira H. A diversity-control-oriented genetic algorithm
(DCGA): development and experimental results. Proceedings of the
Genetic and Evolutionary Computation Conference (GECCO-99);
1999. 1: p. 603–11.
[13] Fujimoto Y, Tsutsui S. A peak shape identification genetic algorithm
with a radial basis function. The International Conference on
Evolutionary Computation; 1997. p. 249–354.
[14] De Jong ED, Watson RA, Pollack JB. Reducing bloat and promoting
diversity using multi-objective methods. Proceedings of the Genetic
and Evolutionary Computation Conference (GECCO-2001); 2001. p.
11–8.
[15] Sanglier M, Romain M, Flament F. A behavioral approach of the
dynamics of financial Markets. Decis Support Syst 1994;12:405–13.
[16] Sanglier M, Allen PM. Evolutionary models of urban systems—an
application to the Belgian provinces. Environ Plann 1989;21:477–98.
[17] Koumousis VK, Dimou CK. Genetic algorithms in a competitive
environment with application to reliability optimal design. Genetic
and Evolutionary Computation Conference, Workshop Program
(GECCO 2001). ; 2001. p. 79–85.
[18] Dimou CK, Koumousis VK. Genetic algorithms in a competitive
environment with application to reliability optimal design. In:
Topping BHV, Kumar B, editors. Proceedings of the Sixth
International Conference on the Application of Artificial Intelligence
to Civil and Structural Engineering. Stirling, UK: Civil-Comp Press;
2001. paper 38.
[19] ENV 1993-1-1, Eurocode 3 Design of steel structures. Part 1.1.
General rules and rules for buildings. CEN 1992.
[20] Christensen PT, Murotsu Y. Application of structural systems
reliability theory. Berlin: Springer; 1986.
[21] Christensen PT, Baker MJ. Structural reliability theory and its
applications. Berlin: Springer; 1982.
C.K. Dimou, V.K. Koumousis / Advances in Engineering Software 34 (2003) 773–785 785