automatisme logiques et automate programmable projet «systéme de tri» twido
TRANSCRIPT

5ème année génie électriqueAutomatisme logiques et automate
programmable
Rapport du Projet« Systéme de tri »
Réaliser par :RGUIBI ZinebALAOUI MadihaLAZRAK El MehdiEL BAHRI Tahar
Encadré par :M. AMHARECH
06 Janvier 2016

.Table des matières
Introduction 4
Cahier de charge 5
1 Description du système de tri 5
1.1 Description du Processus du système de tri . . . . . . . . . . . . . . . 5
1.2 Description des composants du Dispositif . . . . . . . . . . . . . . . . 5
1.2.1 Alimentation et interface . . . . . . . . . . . . . . . . . . . . 6
1.2.2 Le distributeur des pièces . . . . . . . . . . . . . . . . . . . . 6
1.2.3 Le convoyeur . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.4 Les capteurs optiques . . . . . . . . . . . . . . . . . . . . . . 7
1.2.5 Le capteur inductif . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.6 Capteur de hauteur . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.7 Manipulateurs . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.8 Pièces à manipuler . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Mise en œuvre d’un GRAFCET et d’un diagramme fonctionnel 13
2.1 Diagramme fonctionnel . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Grafcet fonctionnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Description du logiciel TWIDO et Validation de la simulation sousle logiciel 18
3.1 L’automate twido . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Description de l’automate Twido . . . . . . . . . . . . . . . . . . . . 20
3.3 Introduction au logiciel Twido . . . . . . . . . . . . . . . . . . . . . 20
3.4 Langages Twido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.5 Langage liste d’instructions . . . . . . . . . . . . . . . . . . . . . . . 21
4 Description du logiciel TWIDO et Validation de la simulation sousle logiciel 22
4.1 Les étapes de création d’un programme twido . . . . . . . . . . . . . 22
4.2 Description de la configuration de notre automate sous twido . . . . 23
4.3 Le programme LADDER . . . . . . . . . . . . . . . . . . . . . . . . 25
Conclusion 29
Génie élecrique 1 ENSA KHOURIBGA

Table des figures
1 Banc du système de tri . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Le distributeur de pièces . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Capteur optique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Capteur inductif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5 Capteur de longueur . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6 Les manipulateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
7 Pièces à manipuler . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
8 Connexion à l’API . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
9 Automate programmable TWIDO de Schneider . . . . . . . . . . . . 18
Génie élecrique 2 ENSA KHOURIBGA

Remerciements
Ce n’est pas parceque la tradition l’exige ou par habitude que cette page estprésente dans notre rapport, mais par ce que les personnes auxquelles s’adressent mesremerciements les méritent vraiment. On tient à exprimer notre profonde gratitudeet nos chaleureux remerciements à notre Professeur Mr. AMHARECH.On tient aussi à remercier toutes les personnes qui ont contribué, de proche ou deloin, à l’accomplissement de ce travail.
Génie élecrique 3 ENSA KHOURIBGA

Introduction
Les Automates Programmables Industriels (API) sont apparus aux Etats-Unisvers 1969 où ils répondaient aux désirs des industries de l’automobile de développerdes chaînes de fabrication automatisées qui pourraient suivre l’évolution des tech-niques et des modèles fabriqués.Un Automate Programmable Industriel (API) est une machine électronique pro-grammable par un personnel non informaticien et destiné à piloter en ambianceindustrielle et en temps réel des procédés industriels. Un automate programmableest adaptable à un maximum d’application, d’un point de vue traitement, compo-sants, langage. C’est pour cela qu’il est de construction modulaire.Les automates programmables sont présents dans tous les domaines de l’industrieoù la gestion du processus est recommandée.Généralement l’automate programmable est manipulé par un personnel électromé-canicien. Le développement de l’industrie à entraîner une augmentation constantedes fonctions électroniques présentes dans un automatisme c’est pour ça que l’APIs’est substitué aux armoires à relais en raison de sa souplesse dans la mise en œuvre,mais aussi parce que dans les coûts de câblage et de maintenance devenaient tropélevés.Ce rapport décrit l’ensemble des composantes et des étapes mis en œuvre afin degérer le fonctionnement d’un système de tri.
Génie élecrique 4 ENSA KHOURIBGA

Cahier de charge
Notre mission consiste à développer un programme Ladder sous l’API TWIDOpour pouvoir commander délicatement un système de Tri entre des pièces métalliqueset non métalliques, pour se faire, nous voyons légitime d’élaborer une démarche pouraboutir aux résultats souhaités :• Chapitre 1 : Description des composants et des phases du Processus fonctionne-ment du système.
• Chapitre 2 : Mise en œuvre d’un GRAFCET et d’un diagramme fonctionnel.
• Chapitre 3 : Description du logiciel TWIDO et Validation de la simulation sousle logiciel .
• Chapitre 4 : Implémention du code sur l’automate TWIDO TELEMECA-NIQUE pour la mise en marche du systéme.
1 Description du système de tri
1.1 Description du Processus du système de tri
Le Processus de fonctionnement s’articule sur les étapes suivantes :1. Le dis-penseur lance une pièce et le convoyeur doit tourner.2. La pièce se déplace par le billet du convoyeur jusqu’à sa détection par le 1ercapteur de présence.3. La pièce continue de se déplacer jusqu’à ce qu’elle arrive au-dessous du capteurde hauteur, le convoyeur s’arrête à ce niveau.4. Le capteur de hauteur détermine si l’épaisseur de la pièce est conforme ou non.5. Le convoyeur redémarrera encore une fois jusqu’à ce que la pièce arrive au 2émecapteur de présence, à ce niveau, ce dernier donne la main au capteur inductif quidétermine si la pièce est métallique ou non.6. Le convoyeur vat encore redémarrer jusqu’à que la pièce arrive aux flippers quiseront responsable de la trier selon son type.
1.2 Description des composants du Dispositif
Dans ce chapitre présent, on va décrire de manière générale le projet sur lequelnous avons travaillé durant ce semestre, il s’agit du système du tri Feedback 34-001.Dans la suite de ce rapport, on va détailler chaque composante de ce système :
Génie élecrique 5 ENSA KHOURIBGA

Figure 1 – Banc du système de tri
1.2.1 Alimentation et interface
Les alimentations d’énergie pour le convoyeur, les capteurs et les actionneurssont situées dans la section derrière la plaque de base, sous le convoyeur.L’interconnexion entre le PLC et les capteurs et les actionneurs sur le système detri exige des circuits d’interface qui sont sur la carte électronique (carte PCB) à lagauche du convoyeur supérieur.
1.2.2 Le distributeur des pièces
Le distributeur de pièces dans le système de tri utilise un déclencheur de solénoïdeet il a pour rôle de manipuler les deux types de composants plastique et métallique.La figure ci-dessous illustre un distributeur de pièces :
Génie élecrique 6 ENSA KHOURIBGA

Figure 2 – Le distributeur de pièces
1.2.3 Le convoyeur
Le système de tri contient un convoyeur qui a pour role de transporter les pieces.Le fonctionnement du convoyeur est muni par un moteur qui est sous contrôle duPLC par l’intermédiaire des circuits d’interfaces.
1.2.4 Les capteurs optiques
Le système est doté de 2 capteurs optiques capable de detecter les pieces généréespar le distributeur.Le statut de chaque capteur optique est schématisé par une LED intégrale adaptépar la carte PCB de ce capteur, et dans notre cas ils sont à l’etat inverse.
Génie élecrique 7 ENSA KHOURIBGA

Figure 3 – Capteur optique
1.2.5 Le capteur inductif
De plus que le capteur optique, le système est muni aussi d’un capteur inductifinitialement à l’etat normal, qu’on l’utilise en jonction avec le capteur optique afind’établir la différence entre les pièces métalliques et les pièces plastique.Ce dispositif est illustré dans la figure suivante :
Génie élecrique 8 ENSA KHOURIBGA

Figure 4 – Capteur inductif
1.2.6 Capteur de hauteur
Ce capteur détermine la hauteur conforme des pièces et il est ajusté à traversdes vises pour donner un résultat quand un composant classé correct est détecté.
Génie élecrique 9 ENSA KHOURIBGA

Figure 5 – Capteur de longueur
1.2.7 Manipulateurs
Pour assurer le déplacement des pièces du convoyeur au panier correspondant,des « nageoires » solénoïde sont mise en œuvre à ce propos sur le système.
Génie élecrique 10 ENSA KHOURIBGA
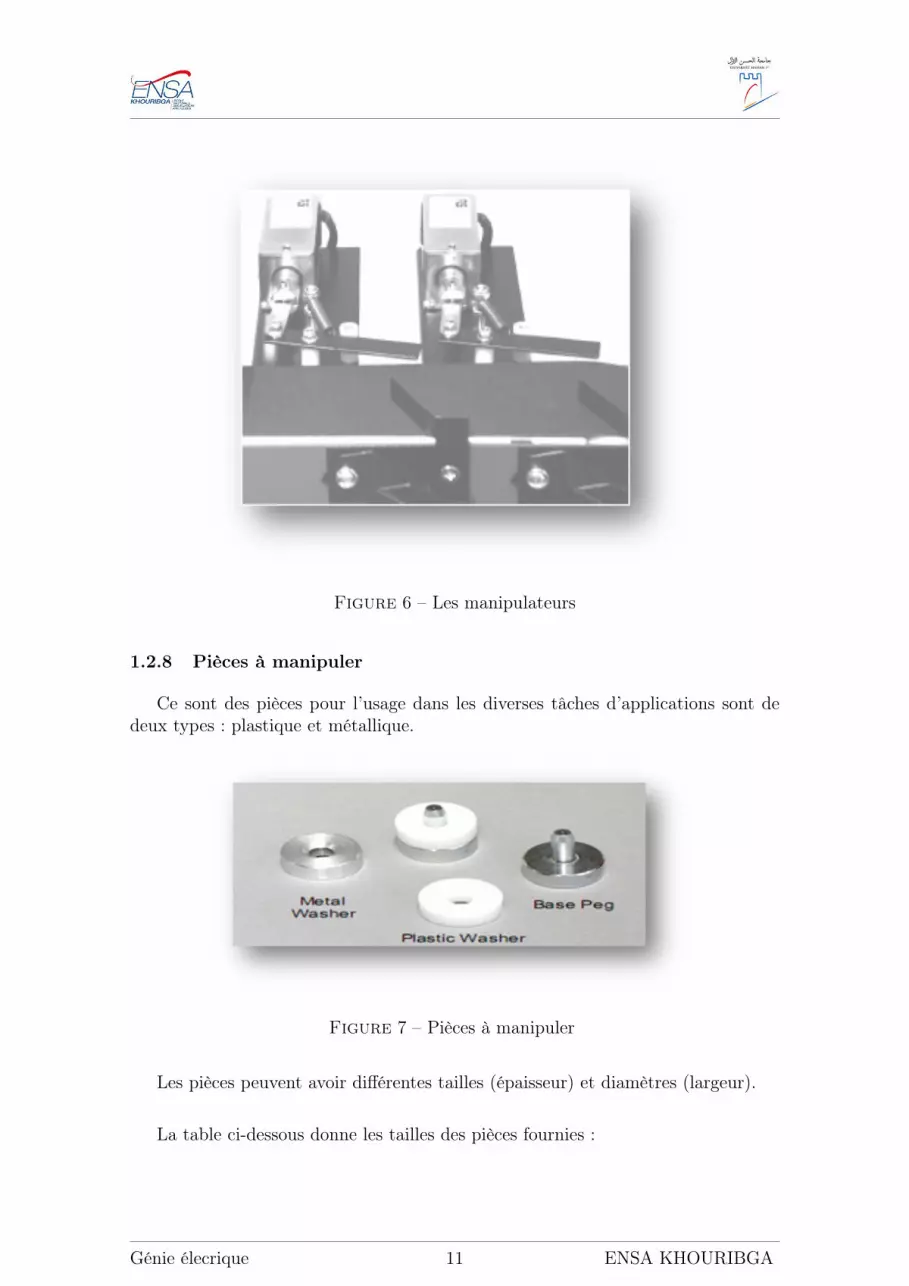
Figure 6 – Les manipulateurs
1.2.8 Pièces à manipuler
Ce sont des pièces pour l’usage dans les diverses tâches d’applications sont dedeux types : plastique et métallique.
Figure 7 – Pièces à manipuler
Les pièces peuvent avoir différentes tailles (épaisseur) et diamètres (largeur).
La table ci-dessous donne les tailles des pièces fournies :
Génie élecrique 11 ENSA KHOURIBGA

N’importe quel PLC utilisé doit être relié à la carte électronique d’interface(située à la gauche du convoyeur supérieur).En plus des connexions dans la table, l’entrée de S/S sur le PLC devrait être reliéeà 24 V et au COM0 – les entrées COM4 devraient être reliées ensemble et à 24 V.Toutes autres connexions sur le PLC doivent être laissées à circuit ouvert. Le schémaci-dessous montre ces connexions schématiquement.
Figure 8 – Connexion à l’API
Génie élecrique 12 ENSA KHOURIBGA

2 Mise en œuvre d’un GRAFCET et d’un diagrammefonctionnel
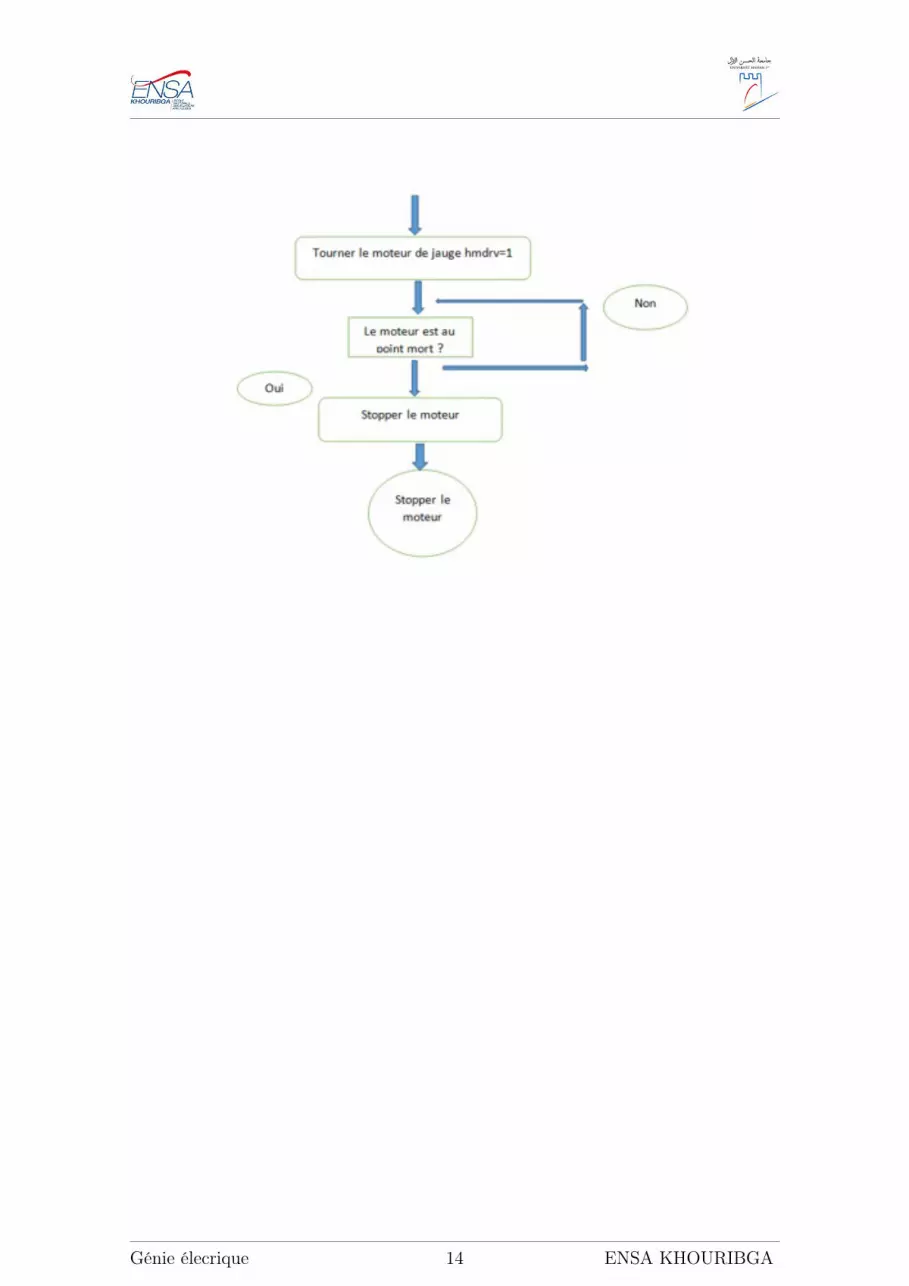
2.1 Diagramme fonctionnel
Génie élecrique 13 ENSA KHOURIBGA
Génie élecrique 14 ENSA KHOURIBGA

Génie élecrique 15 ENSA KHOURIBGA

2.2 Grafcet fonctionnel
Génie élecrique 16 ENSA KHOURIBGA

Nomenclature des ETATS
Génie élecrique 17 ENSA KHOURIBGA

3 Description du logiciel TWIDO et Validation dela simulation sous le logiciel
3.1 L’automate twido
Figure 9 – Automate programmable TWIDO de Schneider
Twido, est un contrôleur programmable d’une incroyable flexibilité qui permetde créer la solution la plus adaptée aux besoins de l’application visée.Il y a toujours une solution Twido facile économique pour les petites installationset les machines compactes.
Génie élecrique 18 ENSA KHOURIBGA
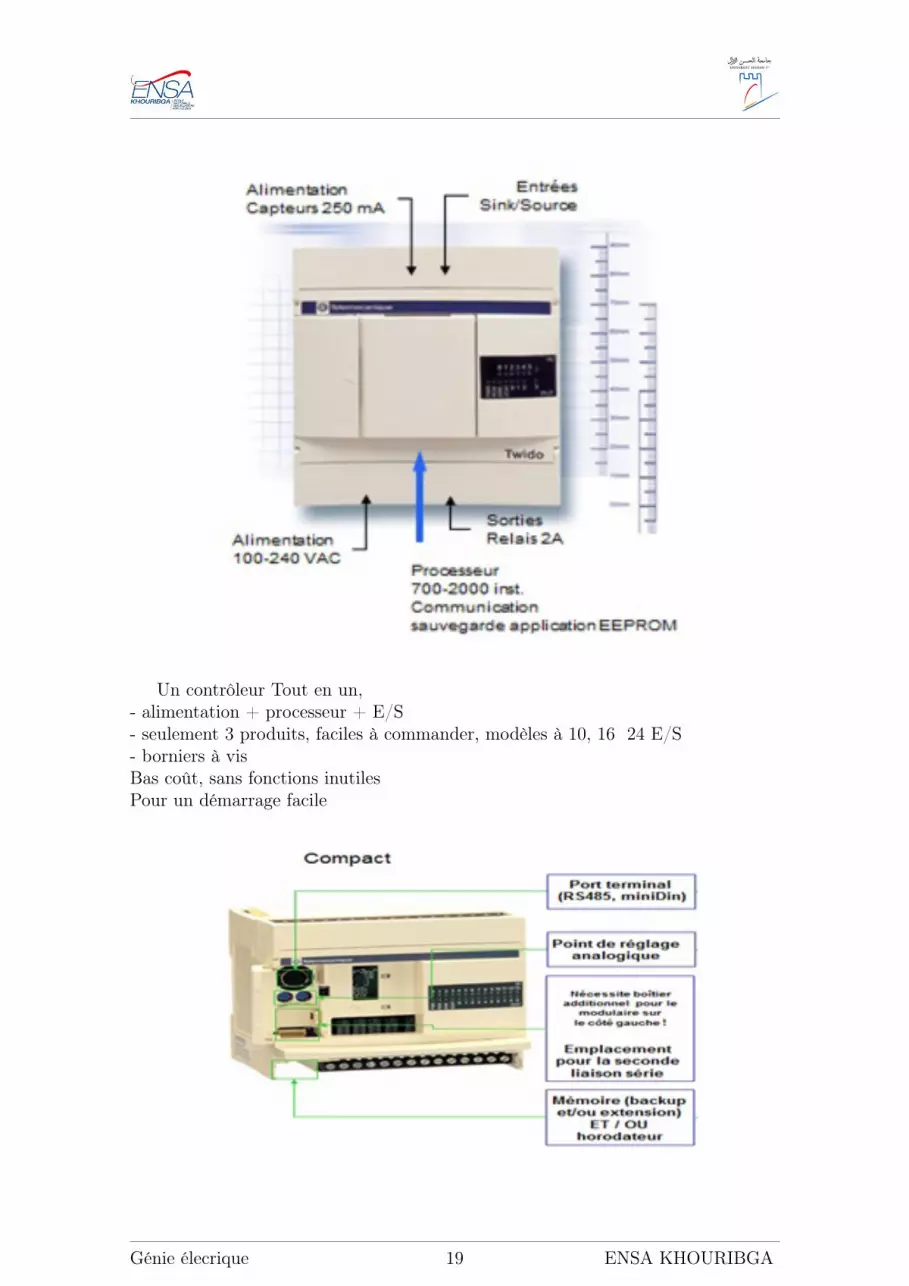
Un contrôleur Tout en un,- alimentation + processeur + E/S- seulement 3 produits, faciles à commander, modèles à 10, 16 24 E/S- borniers à visBas coût, sans fonctions inutilesPour un démarrage facile
Génie élecrique 19 ENSA KHOURIBGA

3.2 Description de l’automate Twido
L’automate compact 24 E/S :• Dispose de 14 entrées TOR et de 10 sorties à relais• Il est doté de 2 points de réglage analogiques ;• Il est muni d’un port série intégré ;• Il Présente un emplacement pour un port série supplémentaire ;• Il accepte jusqu’à 4 modules d’expansion d’E/S ;• Il accepte jusqu’à 2 modules d’interface bus AS-Interface V2 ;• Il accepte 1 module maître d’interface de bus terrain CANopen ;• Il accepte une cartouche facultative (horodateur ou mémoire - 32 Ko uniquement) ;• Il accepte un module de l’afficheur facultatif ;• Il accepte un module d’interface Ethernet Twido Port ConneXium.
3.3 Introduction au logiciel Twido
TwidoSoft est un environnement de développement graphique permettant decréer, configurer et gérer des applications pour automates programmables Twido.TwidoSoftpermet de créer des programmes avec différents types de langage puis detransférer l’application en vue de son exécution sur un automate.TwidoSoft est un programme 32 bits pour PC fonctionnant sous Windows 98 deuxièmeéditionWindows 2000 Professionnel et Microsoft Windows XP.Principales fonctionnalités logicielles offertes par TwidoSoft :
Interface utilisateur Windows standardProgrammation et configuration d’automates Twido
Connexion et contrôle d’automates
Configuration minimaleLa configuration minimale requise pour l’utilisation de TwidoSoft est :
Pentium 300MHz,128 Mo de RAM,
40 Mo de place disponible sur le disque dur.
3.4 Langages Twido
Un automate programmable lit des entrées, commande des sorties et résout unelogique basée sur un programme. La création d’un programme d’un automate Twidoconsiste à écrire une série d’instructions rédigées dans un des langages de program-mation Twido.Les langages suivants peuvent être utilisés pour créer des programmes d’automatesTwido :
Génie élecrique 20 ENSA KHOURIBGA

L Langage liste d’instructions : Un programme liste d’instructions est constituéd’une série d’expressions logiques, rédigées sous la forme d’une séquence d’instruc-tions booléennes.
L Langage schéma à contacts : Un schéma à contacts est une représentation gra-phique d’une expression logique.
L Langage Grafcet : Le langage grafcet est constitué d’une succession d’étapes etde transitions. Twido comprend les instructions liste Grafcet, mais pas les objets dereprésentation graphique Grafcet.
3.5 Langage liste d’instructions
Un programme rédigé en langage liste d’instructions consiste en une série d’ins-tructions exécutées de manière séquentielle par l’automate. Vous trouverez ci-dessousun exemple de programme en langage liste d’instructions.
Génie élecrique 21 ENSA KHOURIBGA

4 Description du logiciel TWIDO et Validation dela simulation sous le logiciel
4.1 Les étapes de création d’un programme twido
E Etape 1 : On démarre twido depuis l’interface utilisateur de Windows puis lemode «programation»
E Etape 2 : Ouvrir un projet stoker dans la mémoire de l automate
E Etape 3 : charger le programme en local ou à distance
Génie élecrique 22 ENSA KHOURIBGA

E Etape 4 : la table d’animation
4.2 Description de la configuration de notre automate soustwido
Génie élecrique 23 ENSA KHOURIBGA

Génie élecrique 24 ENSA KHOURIBGA

4.3 Le programme LADDER
Génie élecrique 25 ENSA KHOURIBGA

Génie élecrique 26 ENSA KHOURIBGA

Génie élecrique 27 ENSA KHOURIBGA
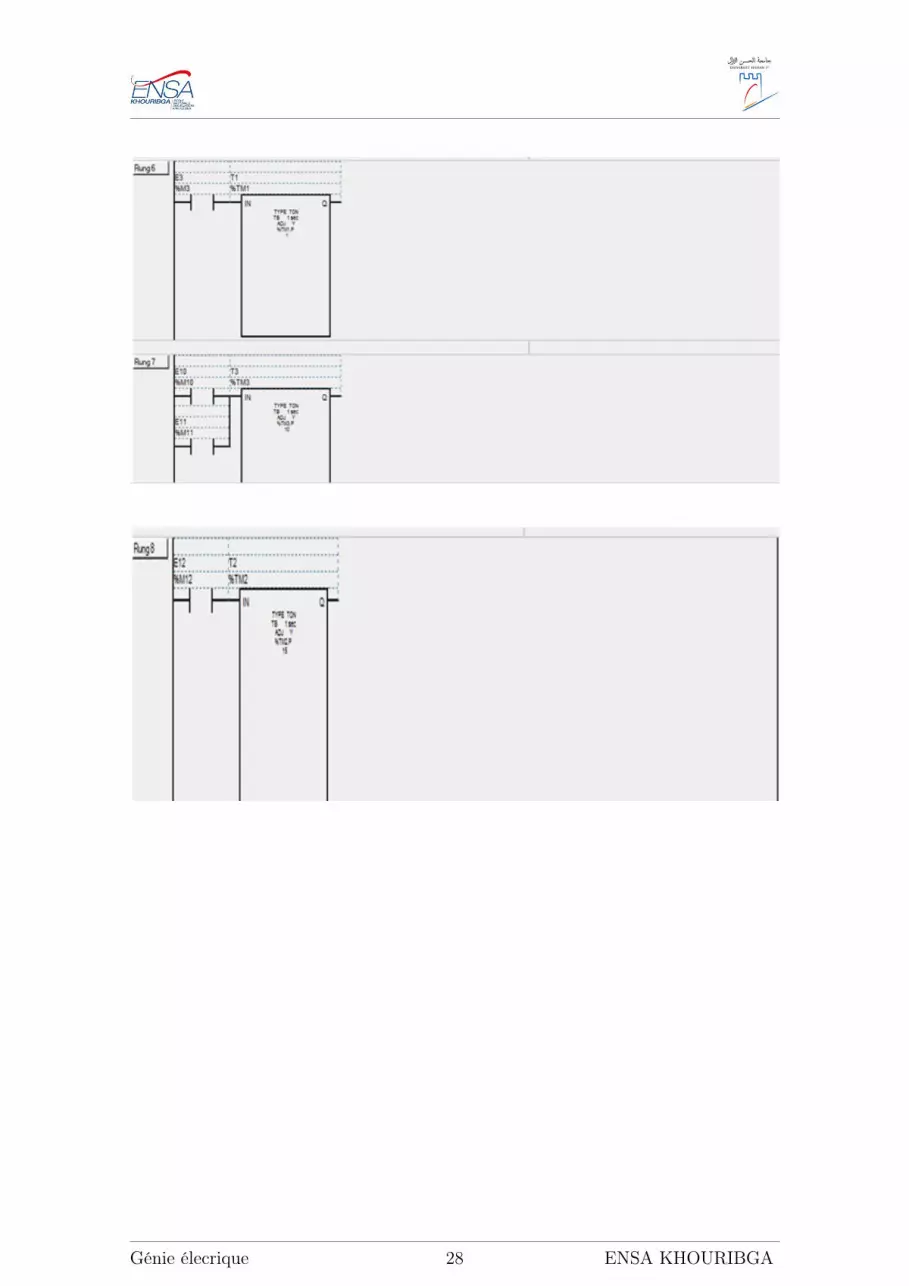
Génie élecrique 28 ENSA KHOURIBGA

Conclusion
Tenons compte de l’insuffisance de la durée procurée à ce projet, et prenons enconsidération la diversité et la multitude d’information reçu au cours de notre tra-vail, Certes, son contenus a pu rependu à plusieurs de nos attentes et ambiguïté, cequi donne une meilleure compréhension et enrichissement du module.Nous tenons à souligner aussi la qualité d’enseignement reçu de la part de notre cherprofesseur, et en profiter pour exprimer nos sincères gratitudes envers ses efforts dé-ployés, pour nous garantir une meilleure formation de son module.
Génie élecrique 29 ENSA KHOURIBGA