capítulo2. estado de deformación - unam
TRANSCRIPT

Capítulo2. Estado de deformación
Dr. Rigoberto Rivera C., Profesor, Facultad de Ingeniería, UNAM. Página 1
CAPÍTULO 2
ESTADO DE DEFORMACIÓN
Introducción
En este capítulo se estudia el movimiento relativo de una partícula elemental de un mediocontinuo con respecto a otra, lo que permite establecer la cinemática de dicha partícula.Asimismo, se definen los conceptos de vector deformación y de tensor deformación.
Se demuestra que la estructura matemática establecida para el estudio del estado de esfuerzo,así como las ecuaciones analíticas derivadas y métodos gráficos empleados, son igualmenteaplicables al estudio del estado de deformación.
Por último, se establecen las llamadas ecuaciones de compatibilidad que garantizan lacontinuidad del material durante su proceso de deformación.
2.1 Descripción del movimiento de un medio continuo
Consideremos una partícula elemental de un medio continuo descargado, y llamemos a esteestado del cuerpo la configuración inicial ( )0t = o no deformada. Cada una de las partículas
que conforman el medio continuo en esta configuración reciben el nombre de partículasmateriales, cuya posición se establecerá en el sistema de referencia cartesiano 1 2 3, ,x x x(también conocido como sistema local o euleriano).
Al someter al cuerpo deformable a un sistema de cargas se generan estados de esfuerzo, loscuales a su vez provocarán estados de deformación. La forma que adopta el medio para untiempo t cualquiera se conoce como configuración deformada y corresponde a la imagen queproporciona una fotografía del cuerpo para el tiempo especificado. Cada una de las partículasque conforman el cuerpo en esta configuración reciben el nombre de partículas espaciales,cuya posición se establecerá en el sistema cartesiano 1 2 3, ,x x x′ ′ ′ (denominado sistema
espacial o lagrangiano).
Para describir la cinemática del medio continuo, se supondrá por comodidad que los sistemas
de referencia 1 2 3, ,x x x y 1 2 3, ,x x x′ ′ ′están superpuestos (figura 2.1).

2
FIGURA 2.1 Definición de vector desplazamiento
La posición de cada partícula del medio en la configuración inicial se puede definir mediante
un vector de posición OP , cuyas componentes son:
( ) 1 2 3OP x i x j x k= + + (2.1)
Al transcurrir el tiempo de t=0 a t=t el vector de posición del punto P en la configuracióndeformada resulta
( ) 1 2 3' ' ' 'OP x i x j x k= + + (2.2)
De la figura 2.1 se puede establecer que
( )' POP OP = + (2.3)
Siendo P el vector desplazamiento del punto P , el cual puede ser escrito como
( ) ( )1 2 3 1 2 3' ' 'P x i x j x k x i x j x k = + + − + +
( ) ( ) ( )1 2 3' ' 'P x x i x y j x z k = − + − + −
Llamando a las componentes del vector desplazamiento:
1x x u′ − = (2.4)
2x y v′ − = (2.5)
0
x3
2x´
x1 Configuración deformada
PQ
Q'
P'
t = 0 t = tConfiguración inicialx3
2x
x1
_δ P

3
3x z w′ − = (2.6)
Tomando en cuenta estas últimas ecuaciones, el vector desplazamiento se puede escribir como
P ui vj wk = + + (2.7)
Evidentemente las componentes del vector desplazamiento , ,u v w , dependen de la posicióndel punto en el continuo y del tiempo transcurrido de t=0 a t=t.
Si el vector desplazamiento está asociado con cualquier partícula en la configuración nodeformada, entonces sus componentes se pueden escribir (notación indicial) como
( ) ( )1 2 3 1 2 3, , , ,i i ix x x x x x x x ′= − (2.8)
La ecuación (2.8) representa la descripción material de las partículas de un medio continuo,generalmente utilizada en la mecánica de sólidos.
Cuando el vector desplazamiento esté asociado con cualquier partícula en la configuracióndeformada, se tiene:
( ) ( )1 2 3 1 2 3, , , ,i i ix x x x x x x x ′ ′ ′ ′ ′ ′ ′= − (2.9)
En este caso, la ecuación (2.9) expresa la descripción espacial de las partículas de un mediocontinuo, comúnmente utilizada en la mecánica de fluidos.
Así, las ecuaciones (2.8) y (2.9) continuas y derivables permitirán describir el campo vectorialde desplazamientos de todos los puntos de un continuo en cualquier instante. El lugar
geométrico de los extremos de vectores desplazamiento respecto a la posición originaldescribirá la trayectoria de cada punto material del continuo. El conocimiento de lastrayectorias permite describir la cinemática de las partículas de un medio continuo, pero paraconocer la cinemática completa de las partículas es necesario describir el movimiento relativode la partícula respecto a la trayectoria.
Para ello se analizará una partícula elemental del medio continuo, tal como se muestra en lafigura (2.2), donde por facilidad de exposición se adoptará un sistema de referenciacartesiano , ,x y z .

4
FIGURA 2.2 Definición de vector desplazamiento relativo
Supongamos una partícula material del medio ( )0t = y fijemos dos puntos de dicha partícula,
por ejemplo P y Q separados una distancia diferencial. La posición de dichos puntos estádada por las siguientes coordenadas:
( ) ( ), , ; , ,P x y z Q x dx y dy z dz+ + +
Al transcurrir el tiempo, la posición de la partícula en la configuración deformada estará dadapor las coordenadas de los puntos P′ y Q′ esto es:
( ), ,P x u y v z w′ + + +
( ), ,Q x dx u du y dy v dv z dz w dw′ + + + + + + + + +
Así, la nueva posición de la partícula quedará definida una vez que se establezca el campo de
desplazamiento , mediante funciones continuas y derivables.
2.2 Características de rotación y cambio de forma de la partícula
Con referencia a la figura (2.2), llamaremos al vector Q/P∆ la diferencia vectorial siguiente:
Q/P Q P ∆ = − (2.10)
El vector ∆ mide la rotación y el cambio de forma de la partícula y representa elmovimiento relativo del punto Q respecto al punto P.
Evaluando la ecuación (2.10), el movimiento relativo de la partícula quedará descrito por
δ_
P'
P
z
y
x
Q
P
_δ
Q'Q
dxdy
dz
t = 0 t = t

5
( ) ( ) ( ) ( )/PQ u du i v dv j w dw k ui vj wk∆ = + + + + + − + +
Q/P dui dvj dwk∆ = + + (2.11)
Desarrollando la ecuación (2.11), se tiene:
/PQ
u u u v v vdx dy dz i dx dy dz j
x y z x y z ∂ ∂ ∂ ∂ ∂ ∂∆ = + + + + + ∂ ∂ ∂ ∂ ∂ ∂
w w wdx dy dz k
x y z
∂ ∂ ∂+ + + ∂ ∂ ∂ (2.12)
La ecuación (2.12) se puede escribir de manera matricial como
/PQ
u u u dxx y z
v v vdy
x y z
w w wdz
x y z
∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∆ = ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂
(2.13)
De la figura (2.2) se puede observar que el vector que une los puntos P y Q resulta igual a
PQ dxi dyj dzk= + + . (2.14)
Dividiendo la ecuación (2.13) entre el módulo de PQ , se obtiene:
/P
Q
dxu u u
x y z
v v v dy
x y zPQ PQ
w w w dzx y z
PQ
PQ
∂ ∂ ∂ ∂ ∂ ∂
∆ ∂ ∂ ∂= ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
(2.15)
Obsérvese en esta última ecuación que los elementos del vector columna representan loscosenos directores del vector que va de P a Q el cual se puede escribir como
cos cos cose i j k = + + (2.16)

6
Llamando a/ PQ
PQ
∆el vector deformación total, , la ecuación (2.15) se puede escribir
como
ijE e = (2.17)
Siendo:
ij
u u u
x y z
v v vE
x y z
w w w
x y z
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
(2.18)
ijE recibe el nombre de tensor deformación total.
Este tensor se puede expresar como la suma de dos matrices, esto es:
1 1
2 2
1 1
2 2
1 1
2 2
ij
u u v u w
x y x z x
v u v v wE
x y y z y
w u w v w
x z y z z
∂ ∂ ∂ ∂ ∂ + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ + + ∂ ∂ ∂ ∂ ∂
1 10
2 2
1 10
2 2
1 10
2 2
u v u w
y x z x
v u v w
x y z y
w u w v
x z y z
∂ ∂ ∂ ∂ − − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ + − − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ − − ∂ ∂ ∂ ∂
(2.19)
La primera matriz (simétrica) se conoce como tensor deformación, ijE mientras que la
segunda (anti-simétrica) recibe el nombre de tensor rotacional, ijΩ .

7
Así, el tensor deformación total se puede expresar como la suma de dos tensores, esto es:
ij ij ijE E= + Ω (2.20)
2.3 Interpretación física del tensor rotacional
Definiendo a los términos del tensor rotacional, ijΩ como
1 1;
2 2yx zx
u v u w
y x z x
∂ ∂ ∂ ∂ Ω = − Ω = − ∂ ∂ ∂ ∂
1 1;
2 2xy zy
v u v w
x y z y
∂ ∂ ∂ ∂Ω = − Ω = − ∂ ∂ ∂ ∂
1 1;
2 2xz yz
w u w v
x z y z
∂ ∂ ∂ ∂ Ω = − Ω = − ∂ ∂ ∂ ∂
Obsérvese que los elementos del tensor rotacional guardan la siguiente relación:
; ;yx xy zx xz zy yzΩ = −Ω Ω = −Ω Ω = −Ω
Por lo que dicho tensor se pude representar como
00
0
yx zx
ij yx zy
zx zy
Ω Ω Ω = −Ω Ω −Ω − Ω
(2.21)
Para identificar los términos del tensor rotacional ijΩ , apliquemos la definición de rotacional
al campo de desplazamientos
i j k
rotx y z
u v w
∂ ∂ ∂= =∂ ∂ ∂

8
1
2 yz zx xyrot i j k = Ω +Ω +Ω (2.22)
Calculando el producto vectorial1
2rot e × , se tiene:
1
2cos cos cos
zy zx xy
i j k
rot e
× = − Ω Ω Ω
cos cos cos coszx xy zy xyi j = Ω − Ω − −Ω − Ω
cos coszy zx k + −Ω −Ω
1cos cos cos cos
2 zx yx zy xyrot e i j × = Ω +Ω + Ω +Ω
cos cosyz xz k + Ω + Ω (2.23)
Por otra parte, el tensor rotacional aplicado a la dirección definida por el vector e , resultaigual a
cos cos cos cosij yx zx xy zye i j Ω = Ω +Ω + Ω +Ω
cos cosxz yz k + Ω + Ω (2.24)
Obsérvese que las ecuaciones 2.23 y 2.24 resultan ser iguales, por lo que
1
2ij e rot e Ω = × (2.25)
La interpretación física de1
2rot e × se muestra en la figura 2.3.

9
FIGURA 2.3 Interpretación física del término rot e ×
Se puede observar en esta figura que dicho término representa al conjunto de vectores vgenerados por una rotación alrededor del eje r o t , con un giro de magnitud
1
2rot
El conjunto de vectores v tienen magnitudes proporcionales a su distancia d al vector
rot .
Para aclarar el significado físico del tensor rotacional, consideremos una barra rígida sometida
a un giro z tal como se muestra en la figura 2.4. Consideremos que en los extremos de la
barra se localizan los puntos P y Q separados una distancia diferencial.
rot_δ x e
_δrot
v =_
dQω
_e
r_
P
I rot_δ I
_
ω =_
P
zωθ
Q'
du
dv
dydR
Q
xdx
y
∆δ

10
FIGURA 2.4 Rotación pura de una barra rígida
El vector desplazamiento relativo del punto Q respecto al punto P es:
dui dvj∆ = + (2.26)
El desplazamiento du se puede calcular como
( )cos coszdu dR dR = + −
( )cos cos cosz zdR sen sen dR = − −
( )cos 1 cosz z
dusen sen
dR = − − (2.27)
( )zdv dRsen dRsen = + −
( )s cos cosz zdR en sen dRsen = + −
( )cos cos 1z z
dvsen sen
dR = + − (2.28)
Las ecuaciones (2.27) y (2.28) se pueden expresar en forma matricial como
cos ω 1 senω cosθ
senω cos ω 1 senθ
z z
z z
du
dRdv
dR
− − = −
(2.29)
Si z es pequeño, entonces z zsen = y cos 1z = , por lo que la ecuación 2.29 se
reduce a
0 ω cosθ
ω 0 senθ
z
z
du
dRdv
dR
− =
(2.30)
Obsérvese que esta última ecuación puede ser representada como
ij e = Ω con 0ijE =

11
por lo tanto:
yx zΩ = − y xy zΩ =
Así, los términos del tensor rotacional ijΩ representan los giros del elemento alrededor del
eje z .
2.4 Interpretación física del tensor deformación
El tensor deformación quedó definido por
1 1
2 2
1 1
2 2
1 1
2 2
ij
u u v u w
x y x z x
v u v v wE
x y y z y
w u v w w
x z z y z
∂ ∂ ∂ ∂ ∂ + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ + + ∂ ∂ ∂ ∂ ∂
(2.31)
A continuación, se da la interpretación física de cada uno de los elementos del tensordeformación. El término
u u
x x
∂ ∆≅∂ ∆
donde u∆ representa el desplazamiento del elemento dx en la dirección x mientras que x∆es la dimensión original del elemento. Así
u
x
∂∂
representa la deformación normal o longitudinal unitaria en la dirección ,x y , en lo que
sigue la designaremos como xx El primer subíndice representa la dirección del
desplazamiento del punto Q a Q ′ , en tanto que el segundo, la dirección de los puntos P a
Q dada por el vector unitario e .
De manera similar, designaremos a los términos
ε yy
v
y
∂ =∂ y ε zz
w
z
∂ =∂
12
los cuales representan las deformaciones normales o longitudinales unitarias en las direccionesy y z , respectivamente. Los valores de serán positivos cuando los lados de la partícula
aumentan de longitud, en caso contrario serán negativos.
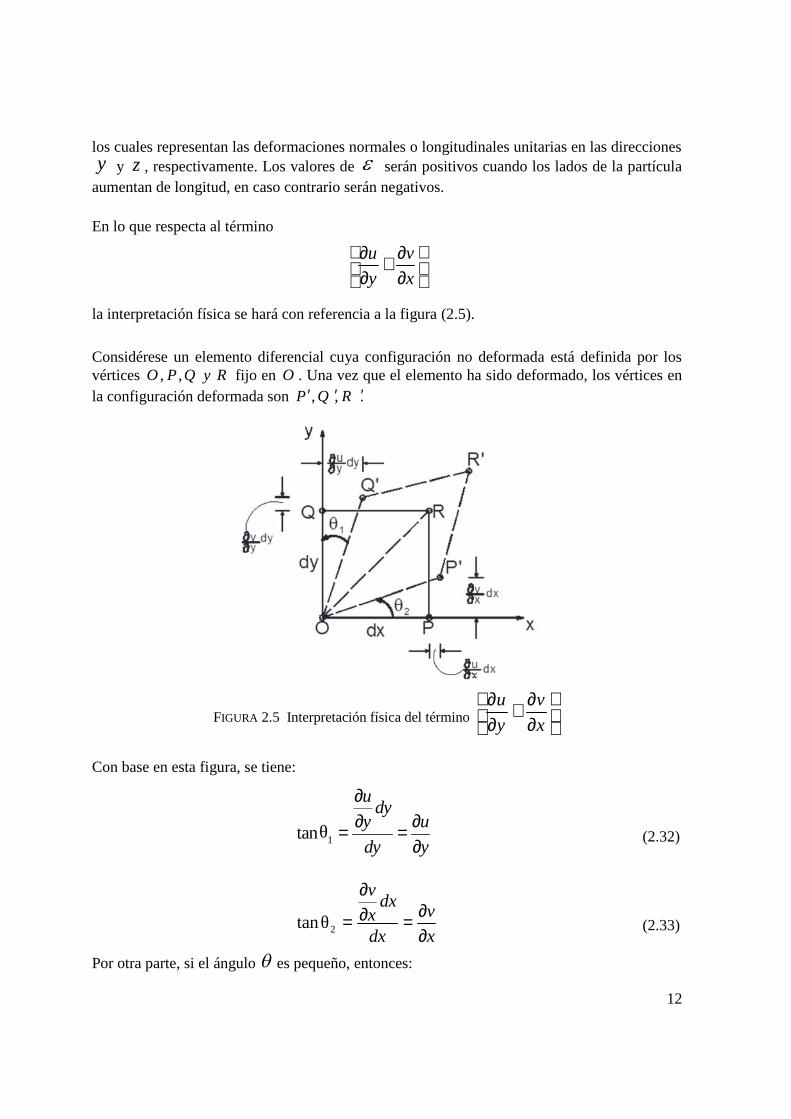
En lo que respecta al término
u v
y x
∂ ∂+ ∂ ∂
la interpretación física se hará con referencia a la figura (2.5).
Considérese un elemento diferencial cuya configuración no deformada está definida por losvértices , ,O P Q y R fijo en O . Una vez que el elemento ha sido deformado, los vértices enla configuración deformada son , ,P Q R′ ′ ′.
FIGURA 2.5 Interpretación física del términou v
y x
∂ ∂+ ∂ ∂
Con base en esta figura, se tiene:
1tanθ
udy
uy
dy y
∂∂∂= =∂ (2.32)
2tanθ
vdx
vxdx x
∂∂∂= =∂
(2.33)
Por otra parte, si el ángulo es pequeño, entonces:

13
1 2θ θu v
y x
∂ ∂+ ≈ + ∂ ∂ (2.34)
En lo que sigue, designaremos al término
yx
u v
y x
∂ ∂+ = ∂ ∂
observamos que éste representa el cambio angular entre los lados ,dx dy y se conoce comodeformación angular o deformación cortante.
Analizando las características de deformación en los planos ,xz yz se puede establecer poranalogía:
zx
w u
x z ∂ ∂ = + ∂ ∂
zy
w v
y z
∂ ∂= + ∂ ∂
siendo zx y zy los cambios angulares entre los lados d x y d z y los lados d y y
d z , respectivamente. Los valores de las deformaciones angulares serán positivos cuandodecrece el ángulo que forman los lados correspondientes, en caso contrario serán negativos.
De esta manera, el tensor deformación puede ser representado como
1 1
2 21 1
2 21 1
2 2
xx yx zx
ij xy yy zy
xz yz zz
E
=
(2.35)
Así, en el tensor i jE aparecen:
a) En su diagonal principal, las deformaciones longitudinales unitarias en tres direccionesortogonales.
b) Simétricamente a la diagonal principal aparecen la mitad de las deformaciones angularesentre tres lados originalmente ortogonales.

14
PROBLEMA 2.1En el medio continuo representado en la figura (2.6), se establece el siguiente vector desplazamiento
( ) ( )yz i xz j = − +
FIGURA 2.6 Barra cilíndrica sometida a un campo de desplazamientos
Las componentes del vector desplazamiento son:
; ; 0;u yz v xz w cte =− = = =
Los elementos del tensor deformación se calculan como
0 ;u v
zx x
∂ ∂= =∂ ∂
; 0u v
zy y∂ ∂= − =
∂ ∂
;u v
y xz z ∂ ∂=− =
∂ ∂
0 ; 0 ; 0w w w
x y z
∂ ∂ ∂= = =∂ ∂ ∂
Por lo tanto:
L
R
z
y
xR
xC
B
A
y

15
i j k
w v w u dv durot i j k
x y z y z x z dx dy
u v w
∂ ∂ ∂ ∂ ∂ ∂ ∂ = = − − − + − ∂ ∂ ∂ ∂ ∂ ∂ ∂
( ) ( ) ( )0 0rot i x j y k z z = − − + + +
( ) ( ) ( )2rot i x j y k z = − − +Además:
0 02
0 02
02 2
ij
y
xE
y x
− = −
a) En el origen ( partícula C ).
0 , 0 , 0x y z= = =
se tiene:
0 , 0 , 0ijE rot = = =
De lo anterior se concluye que no hay traslación, ni rotación ni cambio de forma.
Analizando la cinemática de la partícula A en 0z =
En este caso,
, 0 , 0x R y z= = =
por lo que 0 = .
El rotacional del vector resulta:
rot R i = − ⇒ la partícula gira alrededor del eje x en dirección negativa.
El tensor deformación vale:

16
0 0 0
0 02
0 02
ij
RE
R
= ⇒
hay cambio de forma
b) Manejando el mismo tensor, describa el movimiento de las partículas , ,A B C en las caras 0z =
y z L= .
b.1) Establezca claramente la rotación de cada una de esas partículas.
b.2) Defina los cambios de forma y dimensiones en las partículas propuestas.
En 0z = , se tiene:
( ) ( )yz i xz j = − +
Por lo tanto, 0 = Este resultado implica que las partículas no experimentan desplazamientosparalelos a ningún eje.
Para el rotacional se tiene:
( ) ( ) ( )2rot x i y j z k = − + − +
( ) ( )rot x i y j = − −
El tensor deformación vale:
0 01
0 02
0ij
y
E x
y x
−
= −
Si se compara el vector rotacional con el vector de posición de cada punto, descrito por
r x i y j= +Se puede observar que ambos vectores tienen las mismas líneas de acción, pero difieren en dirección
en 180°. Además, las magnitudes de los vectores rot son proporcionales en a la magnitud de losvectores de posición.
Lo anterior indica que todos los vectores rot coinciden en el origen. Por lo tanto,
0origen
rot = ⇒ no hay giro
Analizando la sección 1z = se tiene:

17
( ) ( )y i x j = − +
Ya que 0w= la sección permanece plana, y sólo se presentan desplazamientos en el plano de lasección.Dado que
FIGURA 2.7 Componentes del vector desplazamiento en la sección 1z =
r xi y j= + y ( ) ( )y i x j = − +
Los desplazamientos son proporcionales a la magnitud del vector de posición r y ortogonales a él,por lo que podemos escribir:
r =
Por lo tanto la sección 1z = permanece plana y gira rígidamente alrededor del eje z , un ángulo .
El ángulo mide el giro respecto a z , de una sección distante 1z = , de la sección que no se mueve.
Además,
( ) ( ) ( )1
2z
rot x i y j k =
= − − +
Este vector es igual al de la sección 0z = más un vector 2 k , que implica una rotación rígida
alrededor de 0z = .
Además de estos movimientos rígidos de las partículas, se cumple que
1 0ij ijz zE E
= = =
Finalmente, en z L= :
θx
y−θ
x
y
−θy
xθ θx δδ

18
1z L zL
= = =
La sección permanece plana, girando un ángulo L respecto al eje z.
0(2 )
z L zrot rot L k
= = = +
Así, las rotaciones de las partículas son similares a las de 0z = , pero son una rotación rígida alrededor
de z con magnitud igual a L .
Por lo tanto, ( ) ( )yz i xz j = − + describe la torsión de una barra cilíndrica cuando las
secciones permanecen planas y la sección z L= gira un ángulo L respecto a la primera sección.
2.5 Componentes normal y cortante del vector deformación
Previamente se estableció que el vector desplazamiento relativo de un punto Q respecto a un
punto P , se puede expresar como la diferencia vectorial /Q P Q P ∆ = − . En la figura 2.8
se muestra gráficamente dicho vector.
FIGURA 2.8 Componentes normal y cortante del vector desplazamiento relativo
Se puede observar en dicha figura que si P y Q son dos puntos en la configuración no
deformada del cuerpo, cuya dirección está dada por el vector unitario e , entonces ∆ es
el vector que va del punto Q al punto Q′ , ubicado este último en la configuración deformada
del cuerpo. De esta manera, y, con referencia a la figura 2.8 se puede establecer la siguientesuma vectorial
θ ∆ = ∆ + ∆ (2.36)
θ∆δ_
n
_δ∆
∆δ_
θ
Q
e_
P
Q'

19
Dividiendo esta última ecuación entre el módulo del vector PQ , se obtiene:
θ
PQ PQ PQ
∆ ∆∆ = + (2.37)
La ecuación 2.37 se puede escribir como
= + (2.38)
siendo el vector deformación normal o longitudinal y el vector deformación
cortante o desviador. Obsérvese que la ecuación (2.38) tiene la misma forma que la establecida
para el vector esfuerzo nt .
Dado que el vector deformación tiene la misma estructura matemática que el vector
esfuerzo nt , todo lo establecido con anterioridad en el estudio del estado de esfuerzo será
válido para el estado de deformación.
2.6 Deformaciones y direcciones principales de deformación
Para determinar las direcciones principales de deformación, se realiza un planteamientoanálogo al del estado de esfuerzos.
Las magnitudes de las deformaciones principales quedan definidas por la ecuacióncaracterística siguiente:
3 21 2 3 0J J J − + − =
(2.39)
donde:
1 xx yy zzJ = + + ; invariante lineal
2 2 22
1 1 1
4 4 4xx yy yy zz zz xx xy yz zxJ = + + − − − ; invariante cuadrático
3 ijJ E = ; invariante cúbico
Por lo tanto, el tensor deformación principal se puede expresar como

20
1
2
3
0 0
0 0
0 0ijT
=
(2.40)
Siendo 1 2 3, , las deformaciones principales mayor, intermedia y menor,
respectivamente.Por analogía se puede llegar a establecer un elipsoide de Lamé que describe el conjunto de
vectores .
Esto último implica la existencia de direcciones principales de deformación, 1 2 3, ,e e e; en dichas direcciones sólo se generan cambios de dimensiones lineales, pero no angulares.
Las direcciones principales de deformación se calculan con el modelo matemático de valores yvectores característicos, de manera similar a lo que se hizo para el estado de esfuerzo.
Diremos que dos estados de deformación son equivalentes si sus invariantes correspondientesson iguales.
2.7 Significado físico del invariante lineal J1
Considérese un elemento de volumen de un medio continuo sometido a un estado de esfuerzostal que sus dimensiones se reducen, pero el cuerpo mantiene su forma (figura 2.9).* Porfacilidad de presentación, supondremos que las dimensiones originales del elemento sonunitarias.*, Por ejemplo, el generado por un campo de temperatura.

21
FIGURA 2.9 Cambio volumétrico de una partícula de un medio continuo
El cambio de volumen V∆ que experimenta el cuerpo resulta igual a
( ) ( ) ( ) ( ) ( ) ( )1 2 31 1 1 1 1 1V ∆ = + + + −
Desarrollando
( ) ( ) ( )1 2 3 1 2 2 3 3 1 1 2 3V ∆ = + + + + + +
y teniendo presente la definición de invariantes de deformación, resulta que
1 2 3V J J J∆ = + + (2.41)
La suma de los tres invariantes mide el cambio de volumen de una partícula unitaria. Dadoque en muchos problemas de ingeniería las deformaciones longitudinales son menores de 1%,se acepta que
1V J∆ ≈ (2.42)
Dado que la deformación volumétrica unitaria es igual a v
VE
V
∆= , entonces 1vE J= .
2.8 Componentes volumétrica y desviadora del tensor deformación
Supongamos que en un punto de un medio continuo se conoce el tensor deformación, ijE en
un marco de referencia principal. Este tensor, al igual que en el caso del tensor esfuerzo, puedeser descompuesto en sus partes volumétrica y distorsional (o desviadora). Así,
1ε
1
2
3
1
11
2ε
3ε
n
n
n

22
ij vE E E = + (2.43)
donde:
1
1 0 0
0 1 03
0 0 1
JE
=
(2.44)
11
12
13
0 03
0 03
0 03
J
JE
J
− = − −
(2.45)
vE mide el cambio de volumen de las partículas unitarias del cuerpo deformable, mientras
que E , mide la distorsión de las partículas unitarias.
2.9 Ecuaciones de compatibilidad de deformaciones
Para que un tensor simétrico de orden dos corresponda a un tensor deformación, y, por lotanto, sea integrable y exista un campo de desplazamientos del cual provenga, es necesario quese garantice la continuidad del medio continuo durante el proceso de deformación. Para ello,los elementos del tensor deformación deben cumplir con ciertas condiciones, conocidas comoecuaciones de compatibilidad.
Supongamos que de alguna manera se establecen las dos ecuaciones diferenciales siguientes,
siendo la variable desconocida la componente del vector desplazamiento ( ),u x y :
3u
x yx
∂ = +∂
2ux
y
∂ =∂ (2.46)

23
El análisis de estas dos ecuaciones nos lleva a que no pueden ser resueltas debido a que soninconsistentes. El cálculo en ambas ecuaciones de la derivada
2
,u
x y
∂∂ ∂
pone en evidencia dicha inconsistencia. La derivada de la primera ecuación da 3, mientras que
la segunda da 2x .
Si las ecuaciones 2.46 se expresan como
( ),u
f x yx
∂ =∂
( ),u
g x yy
∂ =∂ (2.47)
Entonces, para que estas ecuaciones puedan ser integradas se debe cumplir la siguientecondición:
f g
y x
∂ ∂=∂ ∂
(2.48)
La ecuación (2.48) representa la condición de integrabilidad de Riemann o ecuación de
compatibilidad.
Por lo expuesto, es claro que los elementos del tensor deformación deben guardar cierta
relación entre sí para asegurar la existencia de continuidad del campo de desplazamientos correspondiente.
Para establecer las ecuaciones de compatibilidad, recordemos la definición de cada uno de los
elementos del tensor deformación ijE .
xx
u
x ∂=
∂(2.49)
yy
v
y ∂=
∂ (2.50)
zz
w
z ∂=
∂ (2.51)

24
xy
u v
y x ∂ ∂= +
∂ ∂ (2.52)
xz
u w
z x ∂ ∂= +
∂ ∂ (2.53)
yz
v w
z y ∂ ∂= +
∂ ∂ (2.54)
Para relacionar a los elementos del tensor deformación, efectuemos las siguientes operaciones.
Derivando la ecuación (2.49) respecto a 2y , se obtiene:
2 3
2 2xx u
y x y
∂ ∂=∂ ∂ ∂
(2.55)
Haciendo lo mismo con la ecuación (2.50) pero ahora respecto a 2x , se llega a
2 3
2 2
yy v
x x y
∂ ∂=∂ ∂ ∂ (2.56)
Derivando la ecuación (2.51) respecto a ,x y
2 3 3xy u v
x y y x y x y x
∂ ∂ ∂= +∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ (2.57)
Si ,u v son funciones continuas,
2 22
2 2
xy yyxx
x y y x
∂ ∂∂= +∂ ∂ ∂ ∂ (2.58)
Análogamente, si ,u w son funciones continuas y derivables,
2 2 2
2 2xz xx zz
x z z x
∂ ∂ ∂= +∂ ∂ ∂ ∂ (2.59)
Finalmente, ,v w son funciones continuas y derivables,
2 2 2
2 2
yz yy zz
y z z y
∂ ∂ ∂= +∂ ∂ ∂ ∂ (2.60)
Estas tres últimas ecuaciones forman el primer grupo de ecuaciones de compatibilidad.

25
Ahora, estableceremos las relaciones entre los valores de las deformaciones angulares γ que
permitan definir explícitamente a las deformaciones longitudinales .
Derivando la ecuación (2.52) respecto a z,
2 2xy u v
z y z x z
∂ ∂ ∂= +∂ ∂ ∂ ∂ ∂ (2.61)
La ecuación (2.53) respecto a y :
2 2xz u w
y y z x y
∂ ∂ ∂= +∂ ∂ ∂ ∂ ∂
(2.62)
Finalmente, la ecuación (2.54) respecto a x :
2 2yz v w
x x z x y
∂ ∂ ∂= +∂ ∂ ∂ ∂ ∂
(2.63)
Multiplicando la ecuación (2.63) por ( )1− y sumando miembro a miembro con las ecuaciones
(2.61) y (2.62), se llega a
2
2 xy yz zxu
y z z x y
∂ ∂ ∂∂ = − +∂ ∂ ∂ ∂ ∂
(2.64)
Derivando esta última ecuación respecto a x , se obtiene:
3
2 yz xyzxu
x y z x x y z
∂ ∂ ∂∂ ∂= − + + ∂ ∂ ∂ ∂ ∂ ∂ ∂
2
2 yz xyxx zx
y z x x y z
∂ ∂ ∂ ∂∂= − + + ∂ ∂ ∂ ∂ ∂ ∂ (2.65)
De manera similar, se puede obtener:
2
2 yy yz xyzx
x z y x y z
∂ ∂ ∂ ∂∂= − + ∂ ∂ ∂ ∂ ∂ ∂ (2.66)
2
2 yz xyzxzz
x y z x y z
∂ ∂ ∂∂ ∂= + − ∂ ∂ ∂ ∂ ∂ ∂ (2.67)

26
Las ecuaciones (2.65), (2.66) y (2.67) forman el segundo grupo de ecuaciones de
compatibilidad. Si estas seis ecuaciones son satisfechas, se dirá que los elementos de ijE son
compatibles.
Las seis ecuaciones previas garantizan que se satisfagan las condiciones de Riemann paraestablecer las condiciones de integrabilidad que permiten la aceptación de la existencia del
campo ui vj wk = + + , qu e d e o r i gen a un tensor ijE compatible.
PROBLEMA 2.2
Dado el campo de desplazamientos2 23 2 ( )xy i xzj z xy k = + + − calcule:
2.2.1) Los elementos del tensor deformación.
2.2.2) La componente volumétrica y distorsional del tensor deformación.
2.2.3) Compruebe la compatibilidad del tensor deformación.
2.2.1) Los elementos del tensor deformación se calculan como:
2 1 13 ; 3
2 2xx yx
u u vy xy z
x y x
∂ ∂ ∂= = = + = + ∂ ∂ ∂ ;
1 10 ;
2 2 2yy zx
u u w y
x z x ∂ ∂ ∂ = = = + = − ∂ ∂ ∂
1 12 ;
2 2 2zz yz
w w v xz
z y z
∂ ∂ ∂= = = + = ∂ ∂ ∂
Por lo tanto los elementos del tensor deformación resultan:

27
23 32
3 02
22 2
i j
yy x y z
xE x y z
y xz
+ − = + −
2.2.2) Las componentes volumétrica y distorsional del tensor deformación resultan:
2
2
2
20 0
3
3 20 0
3
3 20 0
3
v
y z
y zE
y z
+
+ =
+
;
2
2
2
2 33 2
23
3 2
2 2 3
z yy xy z
xE xy z y z
y x yz y
+ + − = + − − − −
2.2.3) Compruebe la compatibilidad del tensor deformación.
Primer grupo de ecuaciones de compatibilidad
2 22
2 2
xy yyxx
x y y x
∂ ∂∂= +∂ ∂ ∂ ∂
; zxyxy 26 += ; 6 = 6 + 0 ; 6 = 6
2 2 2
2 2xz xx zz
x z z x
∂ ∂ ∂= +∂ ∂ ∂ ∂
; yxz −= ; 0 = 0 + 0 ; 0 = 0
2
2
2
22
yzzxzxyz
∂∂+
∂∂=
∂∂∂
; 0 = 0 + 0 ; 0 = 0
Segundo grupo de compatibilidad
22 yz xyxx zx
y z x x y z
∂ ∂ ∂ ∂∂= − + + ∂ ∂ ∂ ∂ ∂ ∂ ; ( ) ( )21102 +−−
∂∂=x
; 0 = 0
22 yy yz xyzx
x z y x y z
∂ ∂ ∂ ∂∂= − + ∂ ∂ ∂ ∂ ∂ ∂ ; ( )2110 ++
∂∂=x
; 0 = 0

28
22 yz xyzxzz
x y z x y z
∂ ∂ ∂∂ ∂= − + + ∂ ∂ ∂ ∂ ∂ ∂ ; ( )2110 ++
∂∂=x
; 0 = 0
Se satisfacen condiciones de Riemann por lo que jiE es compatible y existe.
PROBLEMA 2.3
Se colocó una roseta de deformación en un punto de un cuerpo no deformable obteniéndoselos resultados que se muestran en la figura (p.1).
2e 3e
1e4102 −x
410
1−
x4
105.
1
−
x
6060
60
FIGURA 2.10. Deformaciones obtenidas con la roseta de deformación.
2.3.1) Determinar los elementos del tensor deformación.
xyyyxx 2
1,,
2.3.2) Determinar las deformaciones principales 1 3,
2.3.3) Las direcciones principales de deformación.
SOLUCIÓN:
Determinar los elementos del tensor deformación

29
1cos2 2
2 2 2xx yy xx yy
xysen
+ −
= + +
1cos2 cos2 2
2 2 2 2 2yy yyxx xx
xysen = + + − +
( ) ( ) 11 cos2 1 cos2 2
2 2 2yyxx
xysen = + + − +
Para:4
1 , 0 : 2 10e x −= =
( ) ( ) 02
111
211
2102 4 senx xy
yyxx +−++=−
; xxx =−4102
Para4
2 105.1,120, −== xe i
( ) ( ) 2402
1240cos1
2240cos1
2105.1 4 senx xy
yyxx +−++=−
−+=−
xyyyxxx
2
1
2
3
4
3
4105.1 4
;
−+=
−−
xyyy
xx
2
1
2
3
4
3
4
102105.1
44
−+= xyyy
2
1
2
3
4
30001.0
Para4
3 101,60, −== xe i
( ) ( ) 1202
1120cos1
2120cos1
2101 4 senx xy
yyxx +−++=−
++=−
xyyyxxx
2
1
2
3
4
3
4101 4 ;
+= xyyy
2
1
2
3
4
300005.0

30
54 108867.22
1;101 −− −== xx xyyy ;
−
−=
−−
−−
45
54
101108867.2
108867.2102
xx
xxE ji
Determinar las deformaciones principales 1 3;
22
3,1 2
1
22
+
−±
+= xy
yyxxyyxx
( ) ( ) ( )5
24444
3,1 108867.22
101102
2
101102 −−−−−
−+
−±+= xxxxx ;
53
41
102265.9
100773.2−
−
==
x
x
Determinar las direcciones principales de deformación
2
2
1
2tanyyxx
xy
−= ;
( )57734.0
2
101102
108867.22tan
44
5
−=
−−=
−
−
xx
x
( )tan 0.577342 30 ; 2 30 ; 2 ¨ 180 30 150
2
arc
−′ ′ ′= =− =− = − =
;
Con 2 30 ′ = −
( ) ( ) ( ) ( ) ( ) ( ) ( )4 4 4 4
52 10 1 10 2 10 1 10
cos 30 2.8867 10 302 2l sen
− − − −−
× + × × − ×= + − + − × −
412.0773 10 ;l −= × = ; 130 0.9659 0.2588e i j′ = − = −
( ) ( ) ( ) ( ) ( )4 4 4 4
52 10 1 10 2 10 1 10
cos150 2.8867 10 1502 2l sen
− − − −−
× + × × − ×= + + − ×
31
539.2265 10 ;l −= × = ; 3150 ; 0.2588 0.9659e i j ′ ′= = − −
Problemas propuestos del capítulo
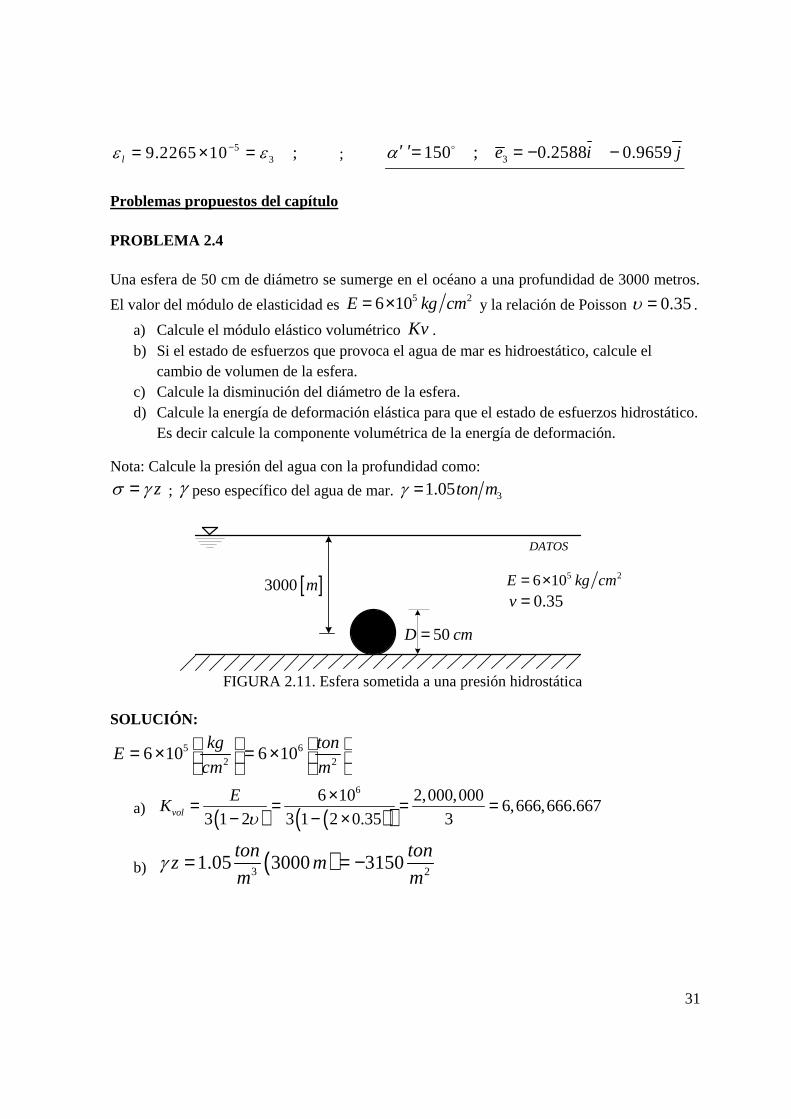
PROBLEMA 2.4
Una esfera de 50 cm de diámetro se sumerge en el océano a una profundidad de 3000 metros.
El valor del módulo de elasticidad es 5 26 10E kg cm= × y la relación de Poisson 0.35 = .
a) Calcule el módulo elástico volumétrico Kv .b) Si el estado de esfuerzos que provoca el agua de mar es hidroestático, calcule el
cambio de volumen de la esfera.c) Calcule la disminución del diámetro de la esfera.d) Calcule la energía de deformación elástica para que el estado de esfuerzos hidrostático.
Es decir calcule la componente volumétrica de la energía de deformación.
Nota: Calcule la presión del agua con la profundidad como:
z = ; peso específico del agua de mar. 31.05ton m =
[ ]3000 m
DATOS
5 26 10E kg cm= ×0.35v =
50D cm=
FIGURA 2.11. Esfera sometida a una presión hidrostática
SOLUCIÓN:
5 62 2
6 10 6 10kg ton
Ecm m
= × = ×
a) ( ) ( )( )66 10 2,000,000
6,666,666.6673 1 2 3 1 2 0.35 3vol
EK
×= = = =
− − ×
b) ( )3 21.05 3000 3150
ton tonz m
m m = = −

32
1 2 3
3vol
+ += ; por tratarse de un estado hidrostático, 1 2 3 = = ;
2
3(3150)3150
3vol
ton
m −= = −
vol vol volK =43150
4.725 106,666,666.667
volvol
volK
−−= = = − ×
( )4 5 34.725 10 0.06545 3.0925 10vol vol oo
VV V m
V − −∆= → ∆ = = − × = − ×
( )3 3 34 40.25 0.06545
3 3 48oV r m = = × = =
c) 1 2 3vol = + + ; al ser un estado hidrostático 1 2 3 = =4
44.725 103 1.575 10
3 3vol
vol
−
−− ×= ⇒ = = = − ×
( )4 50
0
63; 0.5 1.575 10 7.875 10
800,000m
− −= = = × = − = − ×
50 0.5 7.875 10 0.49992D D m −= − = − × =
Verificando el cambio de volumen,3
34 0.499920.065418
3 2V m = =
5 30.06545 0.065418 3.2 10oV V V m−∆ = − = − = ×5 53.2 10 ~ 3.0925 10− −× ≈ ×