bevezetés a speciális relativitás elméletbe · bevezetés a xx. század elején a fizikusok...
TRANSCRIPT
EÖTVÖS LORÁNDTUDOMÁNYEGYETEM
Alkalmazott matematikus szakirány
Bsc szakdolgozat
Bevezetés a Speciális Relativitáselméletbe
Szerző:Sallai Dávid
Témavezető:Dr. Szeghy Dávid Péter
Geometriai Tanszék
Budapest, 2017

Tartalomjegyzék
1. Vonatkoztatási rendszerek és a relativitás elve 41.1. Newton törvények . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2. Vonatkoztatási rendszerek és a Galilei-féle relativitás elve . . . . . . . 5
1.2.1. Fénysebesség és a Galilei transzformáció . . . . . . . . . . . . 7
2. Kísérletek 82.1. Az idő különböző vonatkoztatási rendszerekben . . . . . . . . . . . . 9
2.1.1. Az idő mérése különböző inerciarendszerekben . . . . . . . . . 112.1.2. Müonok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.3. A távolság különböző vonatkoztatási rendszerekben . . . . . . 17
3. Lorentz transzfromáció 19
4. Minkowski Tér-Idő 25
5. A tömeg és az energia ekvivalencia 335.1. Előkészületek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2. Kísérlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6. Összefoglalás 38
1

Köszönetnyilvánítás
Szeretnék köszönetet mondani témavezetőmnek, Dr. Szeghy Péter Dávidnak, akiszakmai hozzáértésével, hasznos tanácsaival nagyban hozzájárult szakdolgozatomelkészültéhez.
2

Bevezetés
A XX. század elején a fizikusok rájöttek, hogy Newton 1. törvénye nem csupán amechanikában érvényesek, hanem a fizikán belül bárhol, ahol mozgás történik. Afenti axioma azt mondja ki, hogy bármely vonatkoztatási rendszerben vizsgált testmindaddig nyugalomban marad vagy egyenes vonalú egyenletes mozgást végez, mígegy külső erő nem hat rá.Vajon, ha két egymáshoz képest egyenletesen mozgó megfigyelő egy kísérletet meg-vizsgál, akkor ugyanazon fizikai mennyiségeket mérik ki? Erre a kérdésre a Galileitranszformáció ad választ: ha a megfigyelt kísérlet "sebessége" elenyésző a fény se-bességéhez képest, akkor a válasz igenlő.Következésképpen, ha a megfigyelőkhöz hozzárendelünk egy-egy Descartes-féle koor-dinátarendszert,K-t illetveK ′-t, akkor a fent említett transzformáció azt mondja ki,hogy a két renszer egymásba transzformálható. A későbbiekben látni fogjuk -amit kí-sérletekkel bizonyítottak-, ha az egyik megfigyelő a másikhoz képest fénysebességgelmozog, akkor furcsa dolgok történnek az idővel és a hosszal. A Galilei transzformációnem ad helyes összefüggést a két koordináta rendszer között, azaz nem ugyananzonfizikai mennyiségeket méri ki a két megfigyelő.Albert Einstein volt aki magyarázatot adott a Galilei transzformáció hiányosságairaés általa nyert értelemet a Lorentz-féle transzformáció.Dolgozatom betekintést kínál a speciális relativításelméletbe valamint annak követ-kezményeibe.
3

1. fejezet
Vonatkoztatási rendszerek és arelativitás elve
1.1. Newton törvények
A mozgások megértéséhez szükségünk van Newton három törvényére:I. Tehetetlenség törvénye: bármely vonatkoztatási rendszerben vizsgált test
mindaddig nyugalomban marad vagy egyenes vonalú egyenletes mozgást végez, mígegy külső erő nem hat rá.
II. Dinamika alaptörvénye: Egy test megváltoztatja alapállapotát, ha külsőerő hat rá: a testre ható erő egyenesen arányos az általa létrehozott gyorsulással ésfordítottan arányos a test tömegével (a tömeg állandó). Azaz:
~F = m · ~a (1.1)
ahol ~a = d~v/dt.Az összefüggés megmutatja, hogy minél nagyobb egy testre ható erő, annál nagyobba test gyorsulása.
II. Hatás-ellenhatás törvénye: Két test kölcsönhatása során mindkét testreazonos nagyságú, azonos hatásvonalú és egymással ellentétes irányú erő hat.Ez a törvény lényegében azt állítja, hogy az erők mindig párosával lépnek fel atermészetben.
4

1.2. Vonatkoztatási rendszerek és a Galilei-féle rela-
tivitás elve
Lássuk néhány következményét a Newton-törvényeknek.Tegyük fel, hogy van egy rögzített Descartes-féle koordinátarendszerünk K, amireúgy tekintünk, mintha egy „álló” megfigyelőhöz tartozna, aki nem végez mozgást éslegyen egy K ′ rendszerünk melynek t = 0 időpillanatban az origoja egybeesik K-val,de hozzá képest állandó ~v sebességgel mozog, ahol ~v = ds/dt.Egy ~v sebességű tömegpont mozgása (x, y, z) pontból indulva a t időpillanatban:
x(t) = x′(t) + vx · t (1.2)
y(t) = y′(t) + vy · t (1.3)
z(t) = z′(t) + vz · t (1.4)
t = t′ (1.5)
Ahol x′, y′, z′, t′ nem a deriváltat jelöli, hanem a K ′ rendszerhez tartozó koordiná-tákat. Egyszerűség kedvéért tegyük fel, hogy K ′-nek minden tengelye párhuzamos
1.1. ábra. A K ′ v sebességgel halad K-hoz képest
a K rendszerrel, sőt x-tengelyük egybeesik és a mozgó rendszer x-tengely irányába
5

halad, ahogyan az 1.1-es ábrán látható. Ekkor az előbbi egyenleteink az alábbiraegyszerűsödnek:
x(t) = x′(t) + vx · t (1.6)
y(t) = y′(t) (1.7)
z(t) = z′(t) (1.8)
I. Feladat: Mi az áttérés a K rendszerből a K ′ rendszerbe?Legyen P (xp, yp, zp) adott pont. Tegyük fel, hogy a P pont mozog időben és pályájaa K koordinátarendszerben:
PK(t) = (v · t, 0, 0) + PK′(t) (1.9)
Sebessége a K illetve K ′ rendszerben: dPK(t)dt
illetve dPK′ (t)dt
P ′K′(t) = (PK(t)− (v · t, 0, 0))′ (1.10)
P ′K′(t) = P ′K(t)− (v, 0, 0) (1.11)
Ha még egyszer deriváljuk a fenti egyenletet, akkor azt kapjuk, hogy:
P ′′K′(t) = P ′′K(t) (1.12)
Tehát a két rendszerben a sebességek különbözőek, amit az első deriválással nyer-tünk, ugyanakkor a gyorsulás a két rendszerben azonos, amit a második deriváltszolgáltat. Ebből azt a következtetést vonhatjuk le, hogy álló és mozgó megfigyelőa Newtoni mechanikát azonosnak látja, azaz ugyanazokat a törvényeket méri ki. Ezérthetőbben azt jelenti, hogy semmilyen mechanikai kísérlettel nem tudjuk eldönte-ni, hogy álló rendszerben vagy éppen mozgó rendszerben vagyunk. Tehát az 1.6-1.8egyenletekkel kiszámíthatjuk egy K rendszerben lévő esemény idejét és helyét egyK′ rendszerben is.
6

1.2.1. Fénysebesség és a Galilei transzformáció
A klasszikus fizikából tudjuk, hogy a sebességek összeadódnak illetve kivonódnakegymásból attól függően, hogy mihez képest mozognak a testek. Például, ha egykonstans 60km/h-val mozgó vonaton felállunk és menetiránnyal megeggyező irány-ban sétálunk 5km/h-ás sebességgel, akkor mi a megállóban lévő megfigyelőhöz képest65km/h-val haladunk, azaz a vonat sebessége és a mi sebességünk összeadódik. Va-jon érvényes-e ezen összefüggés a fénysebességre is? A válasz nem, mivel 1867-benMichelson kimérte, hogy a fény sebessége állandó 299792458m/s minden inercia-rendszerben, tehát ezt a sebességet nem lépheti át semmi.Megállapodás: A fény sebessége álló és mozgó megfigyelő számára azonos.A Galieli relativitás elve szerint egy test sebessége az álló rendszer szerint mérvemegegyezik a mozgó rendszerben mért sebességével, amihez hozzáadódik a mozgórendszer sebessége. Ez ellentmondásban áll azzal a ténnyel, hogy a fény sebességétsemmi sem lépheti át, következésképpen, ha igaz lenne, akkor el tudnánk dönteni,hogy éppen a mozgó K ′ vagy az álló K rendszerben vagyunk.Albert Einstein volt az első, aki rájött, hogy a Galilei- féle transzformációt el kellvetni és az alábbi két feltételt kihasználva kell eljutni egy helyes koordináta transz-formációhoz.
Einstein posztulátumai:I. A fizika törvényei minden vonatkoztatási rendszerben azonosak.II. Bármilyen mozgás legfeljebb c sebességel haladhat.
A következő részben különböző kísérleteket fogunk látni, melyek bizonyítják, hogy akét megfigyelő nem egyformán méri az időt, ehhez kényelmi szempontból feltesszük,hogy univerzálisan tudjuk mérni az időt ún. óraszinkronizációt csinálunk. Ami aztjelenti, mintha minden térkoordinátához hozzárendelnénk egy órát és mindegyiktökéletes szinkronban állna egymással.(Univerzálisan tudja mérni az időt a megfi-gyelő).Ehhez csupán azt a tényt fogjuk felhasználni, hogy a fény sebessége minden vonat-koztatási rendszerben állandó, azaz c sebességgel terjed.
7

2. fejezet
Kísérletek
A kísérletekben felhasználjuk az előző fejezetben leírt relativitás elvét, az óra szinkro-nizációt és azt a tényt, hogy a fény minden inerciarendszerben állandó c sebességgelmozog. A koordinátarendszerünk vízszintes tengelye egyesítse az x, y, z irányokat,hogy érthetőbben tudjuk ábrázolni a tér-idő grafikont, amely azt mondja meg, hogya test hol van valamint legyen a függőleges tengely t, amely azt mondja meg, hogy atest melyik időpillantaban van. A klasszikus fizikából ismert, hogy állandó sebesség-gel mozgó test az út-idő koordinátarendszerben egyenes. Legyen az A esemény az,hogy az origóból (xA, yA, zA, tA) elindítunk egy fotont, B pedig, hogy egy tB időpil-lanatban hol van a foton. A részecske pályáját a 2.1-es ábra szemlélteti. Az ábrán
2.1. ábra. Fény idővonala, melynek meredeksége 1, megfelelő átskálázás után.
az A = (xA, yA, zA, tA)-ból a B = (xB, yB, zB, tB) pontba menő egyenes meredeksége1 amit a fény idővonalának nevezünk. Ennek érdekében az x tengelyen a távolságot
8

úgy kalibráljuk, hogy 1 egység annyi amennyit a fény 1 másodperc alatt megteszilletve a t tengelyen lévő egység pedig másodperc. Későbbi fejezetben látni fogjuk,hogy ami fénysebesség alatt közlekedik, annak pályálya az 1 meredekségű egyenesfelett fog elhelyezkedni.
2.1. Az idő különböző vonatkoztatási rendszerekben
Ahhoz, hogy megértsük a speciális relativitás elméletet meg kell vizsgálnunk egyigen speciális esetet. Vegyünk egy olyan L hosszúságú rudat, melynek közepén egylámpa van. Tegyük fel, hogy ez a fényforrás minden irányba fehér fényt bocsát ki,amikor bekapcsoljuk. A rúd két végén legyen két fénydetektor, melyek érzékelik afényt, ha az odaér (ábra 2.2).
2.2. ábra. Merevrúd, ahol A és B a detektorok illetve O a fényforrás
Tegyük ezt a rudat a mozgó koordinátarendszerünkbe-például egy állandó v se-bességgel mozgó vonatkocsi belsejébe, ahol jelölje K ′ a vonatkocsi saját „nyugvó”koordináta renszerét és legyen K a hozzá képest nyugalomban lévő rendszerünk.Legyen A(xA, yA, zA, tA) az az esemény, hogy a fény eléri a bal oldali detektort (2.2ábra), illetve B(xB, y,zB, tB) pedig az, amikor a jobb oldali detektort éri el a fény.A megfigyelők, hogyan látják az események bekövetkezését?I. A vonatkocsiban lévő megfigyelő azt látja, hogy a fény egyidejűleg éri el a két
9
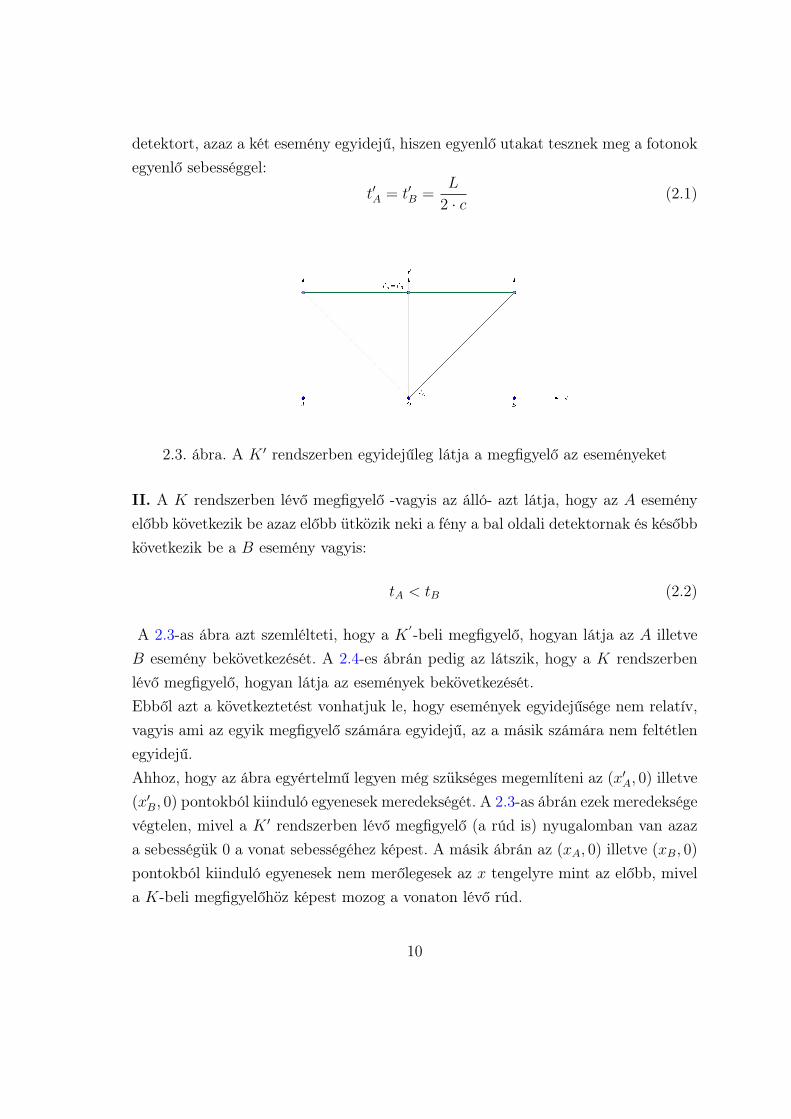
detektort, azaz a két esemény egyidejű, hiszen egyenlő utakat tesznek meg a fotonokegyenlő sebességgel:
t′A = t′B =L
2 · c(2.1)
2.3. ábra. A K ′ rendszerben egyidejűleg látja a megfigyelő az eseményeket
II. A K rendszerben lévő megfigyelő -vagyis az álló- azt látja, hogy az A eseményelőbb következik be azaz előbb ütközik neki a fény a bal oldali detektornak és későbbkövetkezik be a B esemény vagyis:
tA < tB (2.2)
A 2.3-as ábra azt szemlélteti, hogy a K ′-beli megfigyelő, hogyan látja az A illetveB esemény bekövetkezését. A 2.4-es ábrán pedig az látszik, hogy a K rendszerbenlévő megfigyelő, hogyan látja az események bekövetkezését.Ebből azt a következtetést vonhatjuk le, hogy események egyidejűsége nem relatív,vagyis ami az egyik megfigyelő számára egyidejű, az a másik számára nem feltétlenegyidejű.Ahhoz, hogy az ábra egyértelmű legyen még szükséges megemlíteni az (x′A, 0) illetve(x′B, 0) pontokból kiinduló egyenesek meredekségét. A 2.3-as ábrán ezek meredekségevégtelen, mivel a K ′ rendszerben lévő megfigyelő (a rúd is) nyugalomban van azaza sebességük 0 a vonat sebességéhez képest. A másik ábrán az (xA, 0) illetve (xB, 0)
pontokból kiinduló egyenesek nem merőlegesek az x tengelyre mint az előbb, mivela K-beli megfigyelőhöz képest mozog a vonaton lévő rúd.
10

2.4. ábra. A K rendszerben lévő megfigyelő nem egyidejűnek látja az eseményeket
2.1.1. Az idő mérése különböző inerciarendszerekben
Ahhoz, hogy definiálni tudjuk az időt két különböző vonatkoztatási rendszerben,ahol az egyik (K ′) állandó v sebességgel mozog (x tengely irányába) a másikhoz(K) képest, meg kell vizsgálnunk egy újabb kísérletet. Tegyük fel, hogy van egy Lhosszú rúd melynek egyik végén van a fényforrás és fénydetektor illetve a másikvégén egy tükör. Legyen az A esemény az, hogy a (x′ = 0, t′ = 0) időpillanatbanfelvillan a fény. A B esemény pedig legyen a következő: a fény beleütközik a tükörbeés visszaverődik a detektorhoz és megáll az óra. Vizsgáljuk meg ezt a kísérletetelőször a K ′ rendszerben, azaz tegyük fel, hogy ez a rúd merőleges az x tengelyre ésx irányába állandó v sebességgel mozog. Itt fontos megemlíteni, hogy a rúd hosszaállandó (mivel a rúd merőleges az x tengelyre, mintha a vonatsínek közötti távolságlenne,a ami nyilván nem változik), azaz L hosszú. A K
′ beli megfigyelő ismeri arúd hosszát (mivel ő nyugalomban van mert egyenletes sebességgel mozog, így megtudja mérni a rúd hosszát) és tudjuk, hogy a fény sebessége minden vonatkoztatásirendszerben azonos, azaz c. A fenti adatokból pontosan meghatározhatjuk, hogymennyi idő telik el a két esemény között. Legyen ez az idő ∆t
′ .
∆t′ =2 · Lc
(2.3)
11

2.5. ábra. Az (x′ = 0, t′ = 0) tér-idő pillanatban felvillan a fény x′ haladási irányáramerőlegesen
Most nézzük meg mi történik, ha mindezt a K rendszerből szemléljük. Vajon ugyan-azt a ∆t
′ időt fogjuk mérni a saját óránkon?A mi álló vonatkoztatási rendszerünkbe azt fogjuk látni, hogy az A és B eseménynem ugyanazon a helyen fog bekövetkezni mivel hozzánk képest állandó v sebességgelhalad. A rúd a két esemény között megtesz ∆x utat. azaz:
2.6. ábra. A haladási irányra merőlegesen tettük be a rudat illetve v sebességgelhalad K-hoz képest
∆x = v ·∆t (2.4)
12

Ugyanezen idő alatt a fény megtesz 2 · d hosszú utat, ahol d:
d =√L2 + (∆x/2)2 (2.5)
A 2.7-es ábrán ez a távolság az átlók összege ahol az egyik átló az A esemény a
2.7. ábra. A K beli megfigyelő hosszabbnak látja a fény útját
másik pedig a B esemény. Ezen adatokból meg tudjuk határozni ∆t értékét azaz:
∆t =2 · dc
=2 ·√L2 + (∆t·v
2)2
c(2.6)
=
√(2 · L)2 + (∆t · v)2
c(2.7)
=
√(2 · Lc
)2
+
(∆t · vc
)2
(2.8)
(2.9)
Itt vegyük észre, hogy ∆t · v = ∆x, illetve 2·Lc
= ∆t′ ennek következtében:
∆t =
√(∆t′)2 +
(∆x
c
)2
(2.10)
13

Mindkét oldalt négyzetre emelve azt kapjuk, hogy:
(∆t)2 = (∆t′)2 +
(∆x
c
)2
(2.11)
Ahhoz, hogy észrevehessük az összefüggést ∆t és ∆t′ között váltsuk vissza ∆x-et
v ·∆t-re, így:
(∆t)2 = (∆t′)2 +
(v ·∆tc
)2
(2.12)
(∆t′)2 = (∆t)2 −(v ·∆tc
)2
(2.13)
(∆t′)2 = (∆t)2 · (1−(vc
)2
) (2.14)
A 2.14-es összefüggés azt jelenti, hogy a két megfigyelőnek nem ugyanúgy telik azidő, tehát az idő mérése függ az inerciarendszertől, ami egy nagyon fontos különbséga Galilei transzformációhoz képest. Vizsgáljuk meg 2.13-mas egyenletet közelebbről.Ha az egyenlet jobb oldalán lévő v
cmennyiség tart 0-hoz, akkor azt kapjuk, hogy:
∆t′ = ∆t.Viszont, ha v
ctart 1-hez, akkor ∆t′ tart 0-hoz, ami a következőt jelenti. Ha a K ′-beli
megfigyelő közel fénysebességgel utazik, akkor számára „megáll” az idő. A ∆t illet-ve ∆t
′ mennyiségeket sajátidőnek nevezzük. A következő alfejezetben arra fogunkpéldát látni, hogyan viszonyulnak egymáshoz a sajátidők, ha a mozgó koordináta-rendszerben (K ′-ben) közel c sebességgel utazunk.
14

2.1.2. Müonok
1937-ben Carl David Anderson és Seth Neddermeyer fedezték fel a müonokat a koz-mikus sugárzásban. Amikor a kozmikus sugárzás összeütközik a felsőbb atmoszféragázaival a müonok akkor képződnek, amelyek a föld felszíne felé haladnak. Vajon miköze van a müonoknak a speciális relativitáselmélethez?A müonok felezési ideje 1.52µs, azaz ennyi idő alatt bomlik el a részecskék fele, illet-ve sebességük: 0.994 · c. Ezzel elérkeztünk ahhoz, hogy mi az összefüggés a speciálisrelativitás elmélet és a müonok között, ha ránézünk a részecske felezési idejére, ak-kor joggal vetődhet fel a kérdés: Ha ilyen rövid életű ez a részecske és olyan „sokat”utazik, akkor mégis hogyan vagyunk képesek detektálni a földön? A válasz a sajátidő, azaz a K ′ vonatkoztatási rendszerben utazik, ami hozzánk képest (K-hoz ké-pest) 0.994 ·c sebességgel utazik. Ha az előbbi alfejezetben lévő 2.14-es összefüggésrevetünk egy pillantást, akkor láthatjuk, hogy a v
chányados „közel" van 1-hez, azaz
∆t′ kisebb mint ∆t.
Tegyük fel, hogy van egy müon detektorunk, amit egy 1907m magas hegy aljárateszünk és 100db részecskét elindítunk a hegy tetejéről. Hány darab müont fogunkdetektálni?Használjuk a 2.4-es összefüggést:
∆t =∆x
v=
1907
0.994 · c= 6.4µs (2.15)
A 2.15-ös összefüggés azt mondja meg, hogy a K rendszerben lévő nyugvó meg-figyelőnek mit mér az órája.
6.4µs
1.52µs= 4.2 (2.16)
A 2.16 azt mondja meg, hogy hány felezés történt, mivel 100db részecskét indítottunkel a hegycsúcsról ezért:
100 · (0.5)4.2 = 5.4 (2.17)
Azaz mi mint nyugvó megfigyelő közelítőleg 5db részecskét detektálnánk, bár a de-tektorunk nem ezt mutatja. Lássuk, hogy mit mér a K ′-beli megfigyelő azaz a ré-szecske. Most felhasználjuk a 2.14 összefüggést:
15

(∆t′)2 = (∆t)2 · (1−(vc
)2
) (2.18)
= (6.4µ)2 −(
1907m
2.9979 · 108m/s
)2
= (0.704µs)2 (2.19)
Tehát a részecske saját ideje (azaz amennyi idő alatt leér a detektorhoz) 0.704µs.
0.704µs
1.52µs= 0.463 (2.20)
100 · (0.5)0.463 = 72.5 (2.21)
Kijött, hogy 72.5db részecske érkezik a detektorhoz a K ′ rendszer szerint, meglepő
2.8. ábra. A hegy tetejéről 100db részecskét indítunk
módon a detektor 70 körüli értéket mutat a valóságban, ami azt igazolja, hogy a kétvonatkoztatási rendszerben másképpen telik az idő.
16

2.1.3. A távolság különböző vonatkoztatási rendszerekben
Láttuk, hogy két különböző vonatkoztatási rendszerben nem egyformán mérik amegfigyelők ugyanazon események között eltelt időt. Azt fogjuk megvizsgálni, hogyigaz-e ugyanez a feltételezés a távolságokra is, azaz két esemény közötti távolságotmennyinek méri a K illetve K ′ beli megfigyelő.Egy tárgy hosszát általában nyugalomban mérjük, amit a valódi hossznak tekintünk.Mivel a mozgó megfigyelő az „ő” rednszerében nyugalomban van ezért a következőkísérletben ő méri ki a valódi hosszt.Tegyük fel, hogy egy D (aminek valódi hosszát a benne ülő megfigyelő méri ki,melynek hossza D′) hosszúságú vonatkocsi x tengely irányába mozog állandó v se-bességgel. Az esemény legyen a következő: felvillantunk egy lámpát a vonatkocsivégében a menetiránnyal megegyező irányban ami a szemközti faláról visszapattana kezdeti helyére.Az álló K rendszerbeli megfigyelő a következő távolságot fogjakimérni:
∆t = ∆t1 + ∆t2 (2.22)
A 2.22-es egyenletben ∆t1 azaz idő amíg a fény beleütközik a szemközti falba, ∆t2
pedig az, amíg onnan visszapattan a kiinduási helyzetbe.∆t1 idő alatt v sebességgel a vonat ∆x1 utat tesz meg, azaz: ∆x1 = ∆t1·v. Ugyanezenidő alatt a foton ∆x1 +D távolságot tesz meg, ahol:
∆x1 +D = ∆t1 · v +D = ∆t1 · c (2.23)
A foton ∆t2 idő alatt D −∆x2 utat tesz meg, ahol:
D −∆x2 = D −∆t2 · v = ∆t2 · c (2.24)
Felhasználjuk, hogy ∆x2 = ∆t2 · vA 2.23-2.24 egyenletekből azt kapjuk, hogy:I. ∆t1 · c−∆t1 · v = D
II. ∆t2 · c+ ∆t2 · v = D
melyekből:
∆t1 =D
c− v(2.25)
17
∆t2 =D
c+ v(2.26)
∆t = ∆t1 + ∆t2 =D
c− v+
D
c+ v=
2 ·D · cc2 − v2
(2.27)
Most vizsgáljuk meg, hogy aK ′ rendszerbeli megfigyelő szerint mekkora aD távolság(azaz a vonatkocsi valódi hossza). A foton ebben a vonatkoztatási rendszerben mérve2 ·D′ távolságot tesz meg ∆t
′ idő alatt c sebességgel, azaz: 2 ·D′ = ∆t′ · c, amiből:
∆t′ =2 ·D′
c(2.28)
A 2.14-es képletből a következőt kapjuk:
∆t′ = ∆t ·√
1−(vc
)2
(2.29)
Szorozzuk be mindkét oldalt c-vel.
∆t′ · c = ∆t · c ·√
1−(vc
)2
(2.30)
Mivel ∆t′ · c = 2 ·D′ illetve ∆t · c = 2·D·c2c2·(1−( v
c )), azaz a 2.27-2.28 egyenletek ártren-
dezéséből:
2 ·D′ = 2 ·D · c2
c2 ·(
1−(vc
)2)√1−
(vc
)2
(2.31)
D′ = D · 1√1−
(vc
)2(2.32)
A kísérletünkből az derült ki, hogy a távolságok is transzformálódnak nem csak azidők, amit saját távolságnak nevezünk. A 2.32-es képletből leolvasható, ha a K ′-belimegfigyelő közel fénysebességgel (c-vel) utazik a K-beli megfigyelőhöz képest, akkora hosszúsága nagyobb, mint amit az álló megfigyelő mér ki, ugyanez volt megfi-gyelhető az idő transzformálódásánál. Természetesen, ha a v
c→ 0, akkor visszakap-
juk, hogy a mért idők illetve távolságok nem transzformálódnak, következésképpenilyenkor érvényes a Galilei-féle transzformáció. Viszont milyen transzformáció leszirreleváns az Einstein posztulátumokra, azaz amikor v
c→ 1?
18
3. fejezet
Lorentz transzfromáció
Láttuk, hogy az idő és távolság különbözik a K és K ′ rendszerekben, viszont abbanaz esetben amikor a mozgó rendszer sebessége elhanyagolható a fénysebességéhezképest, akkor érvényben marad a Galilei transzformáció. Probléma csak akkor lépfel, ha K ′ sebessége összemérhető c-vel. Kellene találni egy olyan transzformációt,ahol c fix, mivel a régi transzformációban a sebességek összeadódnak.Ismét tegyük fel, hogy K és K ′ koordinátarendszer tengelyei párhuzamosak egy-mással, illetve, hogy x és x′ tengelyek egybeesnek,valamint csak x tengely iránybatörténik mozgás, pozitív irányba. A Galilei transzformáció szerint x = x′ + v · tilletve x′ = x − v · t. Az imént láttuk, hogy egymáshoz képest mozgó megfigyelőknem egyformának mérik az időt illetve távolságot. Mivel az imént leírt első egyen-letnél a jobb oldalon keverednek a két megfigyelő által kimért mennyiségek, ezért azelső tippünk az lenne, hogy az egyenlet jobb oldalán azonos megfigyelő által mértmennyiségek álljanak. Ezért legyen:
x = x′ + v · t′ (3.1)
x′ = x− v · t (3.2)
A 3.1 egyenletek még nem jók, de már majdnem azok, viszont tegyük fel, hogy vanegy olyan függvényünk ami v-től függ (ún. transzformációs függvény). Az ötletünkaz, hogy a legkevesebb változtatást próbáljuk végrehajtani a 3.1-3.2 képletekben ésígy keresni egy olyan összefüggést, mely az eddigi megfigyeléseinkkel összhangbanvan.
19

x = γ(v) · (x′ + v · t′) (3.3)
illetvex′ = γ(v) · (x− v · t) (3.4)
Célunk meghatározni a γ függvényt, ehhez tegyük fel, hogy ha t = 0, akkor t′ is 0,azaz végeztünk egy óraszinkronizációt illetve kihasználjuk azt a tényt, hogy c min-den vonatkoztatási rendszerben állandó.A 3.5-3.6 egyenletek a következő megfigyelésből adódnak. Tegyük fel, hogy egy vo-natkocsi (amely az x tegely irányába v sebességgel halad a K rendszerhez képest)egyik végében van egy fényforrás, amit a t = 0 időpillanatban elindítunk ez legyenaz A esemény valamint a B esemény legyen az, hogy a fény nekiütközik a vonatkocsiszemközti falának. A K ′-beli (aki a vonatban van) megfigyelőnek a két esemény ko-ordinátái A′(0, 0) illetve B(x′, t′), mivel a fény sebessége minden megfigyelő számáraállandó, ezért neki az x’ távolságot a 3.5 egyenlet adja. Hasonlóan a K-beli (álló)megfigyelőnek az A esemény koordinátái A(0, 0) illetve a B eseményé B(x, t), azáltala mért távolságot a 3.6 képlet adja, vagyis:
x′ = c · t′ (3.5)
illetvex = c · t (3.6)
Ezeket felhasználva kezdjük el átrendezni a 3.3 képletet:
x = γ(v) · (x′ + v · t′) (3.7)
x = γ(v) · (x′ + v
c· c · t′) (3.8)
x = γ(v) · (x′ + v
c· x′) (3.9)
x = γ(v) · x′ ·(
1 +v
c
)(3.10)
x = γ(v) · [γ(v) · (x− v · t)] ·(
1 +v
c
)(3.11)
20
x = γ(v) · [γ(v) · (x− v
c· c · t)] ·
(1 +
v
c
)(3.12)
x = γ(v) · [γ(v) · (x− v
c· x)] ·
(1 +
v
c
)(3.13)
x = γ2(v) · x ·(
1− v
c
)·(
1 +v
c
)(3.14)
x-el egyszerűsítve kapjuk γ(v)-t (erre a speciális esetre)
γ(v) =1√
1− (vc)2
(3.15)
Ha a 3.15-ös összefüggésben vc→ 0, akkor γ → 1, azaz visszakapjuk, hogy: x =
x′ + v · t, ami pontosan a Galilei transzformáció.Ha teljesülne az, hogy 1 ≤ v
c, akkor a gyök alatti érték kisebb vagy egyenlő lenne
0-val, ami nem megengedett matematikailag, azaz semmi sem lépheti át a fényse-bességet ebben a transzformációban (jelenlegi tudásunk szerint semmi sem lépi átezt a sebességet).Most csináljuk meg a fenti levezetést x′-re is:
x′ = γ(v) · (x− v · t) (3.16)
x′ = γ(v) · [γ(v) · (x′ + v · t′)− v · t] (3.17)
x′ = γ2(v) · x′ + γ2(v) · v · t′ − γ(v) · v · t (3.18)
x′ · (1− γ2(v)) = γ2(v) · v · t′ − γ(v) · v · t (3.19)
ezt rendezzük t-re
t =1
γ(v) · v· [γ2(v) · v · t′ − x′ · (1− γ2(v))] (3.20)
t = γ(v) · t′ −(
1− γ2(v)
γ(v)
)· x′
v(3.21)
t = γ(v) ·[t′ −
(1− γ2(v)
γ2(v)
)· x′
v
](3.22)
21

felhasználjuk, hogy 1γ2(v)
= 1−(vc
)2
t = γ(v) ·[t′ + (1− (1−
(vc
)2
)) · x′
v
](3.23)
t = γ(v) ·(t′ +
v · x′
c2
)(3.24)
A 3.24-es és 3.7-es egyenletek összefüggést adnak a sajátidők és sajáttávolságok kö-zött, amikből már leírható a Lorentz transzformáció. A következő összefüggések azállandó v sebességgel mozgó K ′ koordinátarendszert transzformálják az álló megfi-gyelő K rendszerébe. Továbbra is x tengely irányába v sebességgel mozogva.
x =1√
1−(vc
)2· (x′ + v · t′)
y = y′
z = z′
t =1√
1−(vc
)2· (t′ + v
c2· x′)
Most pedig következzenek a K rendszert a K ′ vonatkoztatási rendszerbe transzfor-máló egyenletek.
x′ =1√
1−(vc
)2· (x− v · t)
y = y′
z = z′
t′ =1√
1−(vc
)2· (t− v
c2· x)
A Galilei-transzformáció megengedte, hogy átlépjük a fénysebességet ellentmondva atapasztalattal, vizsgáljuk meg, hogy mit mond a Lorentz transzformáció arról, hogy
22

ki hogyan látja a sebességet. Tegyük fel, hogy a K ′ rendszer v sebességgel mozog aK rendszerhez képest és a mozgó koordinátarendszerben van egy állandó sebességgelmozgó részecske, valamint kezdetben t = t′ = 0. Legyen a K-beli megfigyelő szerintez az állandó sebesség u, illetve u′ aK ′-beli megfigyelő szerint. Bontsuk szét (x, y, z)-beli komponensekre először a K rendszerbeli megfigyelő szerint, majd hasonlóan K ′-re is.Legyen ∆x := x1 − x2 illetve ∆t := t1 − t2 a pillanatnyi elmozdulás és idő. Ezeketfelhasználva:
ux = lim∆t→0
∆x
∆t=
= lim∆t→0
1√1−( v
c )2 · (∆x′ + v ·∆t′)
1√1−( v
c )2 · (∆t′ + v
c2·∆x′)
=
= lim∆t→0
∆x′ + v ·∆t′
∆t′ + vc2·∆x′
=
= lim∆t→0
∆t′ ·(
∆x′
∆t′+ v)
∆t′ ·(1 + v
c2· ∆x′
∆t′
)kihasználjuk, hogy lim
∆t→0
∆x′
∆t′= u′x
ux =u′x + v
1 + vc2· u′x
(3.25)
Most csináljuk meg ugyanezt a levezetést uy-ra is.
uy = lim∆t→0
∆y
∆t=
= lim∆t→0
∆y′
1√1−( v
c )2 · (∆t′ + v
c2· x′)
=
= lim∆t→0
∆y′
∆t′
1√1−( v
c )2 ·(1 + v
c2· ∆x′
∆t′
)
23

Ismét felhasználva, hogy u′y = lim∆t′ to0
∆y′
∆t′, azt kapjuk :
uy =u′y
1√1−( v
c )2 · (1 + v
c2· u′x)
(3.26)
Végül, hasonlóan a fenti levezetésekhez :
uz =u′z
1√1−( v
c )2 · (1 + v
c2· u′x)
(3.27)
A fenti összefüggésekből az derül ki, hogy a sebesség is relatív, azaz a két meg-figyelő különbözően méri ki. Érdemes itt is észrevenni, amennyiben v
c→ 0, akkor:
ux = u′x + v
uy = u′y
uz = u′z
Azt látjuk, ha vc→ 0, akkor visszakapjuk a Galilei-féle transzformációt, amelyben a
sebességek összeadódnak, ha fénysebességhez képest elenyésző sebességgel utazunk.Azaz találtunk egy olyan transzformációt amely teljesíti azt a feltételt, hogy a fény-sebesség minden vonatkoztatási rendszerben állandó.Ennek a transzformációnak a megtalálásához mindössze a Galilei transzformációtés az előző fejezetben kísérletek útján megszerzett sajáttávolságot és sajátidőt hasz-náltuk fel és ezek segítségével találtuk meg a γ transzformációs függvényünket.A következő fejezetben a fenti transzformációnál megnézzük, hogy milyen mennyi-ségek maradnak meg valamint, hogy valóban megmarad-e a fénysebesség.
24

4. fejezet
Minkowski Tér-Idő
A második fejezetben (gondolatbeli) kísérletek útján bebizonyítottuk, hogy két kü-lönböző vonatkoztatási rendszerben az időt máshogy mérjük. Ebben a részben azlenne a célunk, hogy találjunk valamilyen metrikát (később világos lesz), amelybenle tudjuk írni a sajátidők között összefüggést nem csak egyenesvonalú egyenletesmozgás esetén, hanem tetszőleges pálya mentén.Ehhez emlékeztetőül írjunk fel pár ekvivalens összefüggést a sajátidőre:
(∆t′)2 = (∆t)2 − ∆x2
c2(4.1)
(∆t′)2 = (∆t)2 ·(
1−(vc
)2)
(4.2)
Az 4.1-es összefüggés hasznosabbnak fog bizonyulni, ahhoz hogy megtaláljuk a meg-felelő metrikát, tehát a későbbiek során inkább erre fogunk hagyatkozni. A vizsgá-latunkhoz szükségünk van még a téridő esemény fogalmára.Téridő eseménynek nevezzük azokat a 4 dimenziós vektorokat, melyek a következőalakúak: (xA, yA, zA, tA), vagyis az A esemény helye és ideje. Legyen (xA, yA, zA, tA)
illetve (xB, yB, zB, tB) két téridő esemény a koordinátarendszerben és tegyük fel,hogy xA 6= xB, yA 6= yB, zA 6= zB, tA 6= tB. A képen látható koordinátarendszerbenaz időt másodpercben illetve a távolságot fénymásodpercben mérjük, azaz 1 egységa vízszintes tengelyen közelítőleg 300.000 km amiket szintén ki fogunk használni.Először határozzuk meg az ábrán látható ~w vektor hosszát az Euklideszi metrikaszerint, ami a következő:
25

4.1. ábra. A és B téridő események
1. Definíció. Legyen x, y ∈ Rn ekkor:
d(x, y) = (n∑i=1
(xi − yi)2)12
ahol d(x, y) a két vektor távolságát jelöli.
Ezt felhasználva a ~w hossza:
|~w| = d( ~OA, ~OB) =√
(xA − xB)2 + (yA − yB)2 + (zA − zB)2 + (tA − tB)2
(∆x)2 = (xA − xB)2 + (yA − yB)2 + (zA − zB)2
(∆t)2 = (tA − tB)2
|~w|2 = (∆x)2 + (∆t)2
Az lett volna a cél, hogy a vektor hossza egyenlő legyen a sajátidőre vonatkozó elsőképlettel, azaz |~w|2 = (∆t)2 − ∆x2
c2. Ahhoz, hogy ez sikerüljön félre kell dobnunk az
Euklideszi metrikát és be kell vezetni egy újat.
26

Vegyük a következő mátrixot:
M =
− 1c2
0 0 0
0 − 1c2
0 0
0 0 − 1c2
0
0 0 0 1
ezzel a mátrixal szorozzuk meg ~w vektort a következőképpen:
~wT ·M ·~w =[xA − xB yA − yB zA − zB tA − tB
]·
− 1c2
0 0 0
0 − 1c2
0 0
0 0 − 1c2
0
0 0 0 1
·xA − xB
yA − yB
zA − zB
tA − tB
Ez a képlet sugallja a következő definíciót:
gM(~v, ~w) := ~vT ·M · ~w
, hiszen ekkor
gM(~w, ~w) := ~wT ·M · ~w = ∆t2 − ∆x2
c2(4.3)
ez a gM bilineáris az alakja miatt és szimmetrikus is, hiszen:
gM(~v, ~w) = (~vT ·M · ~w) =
= (~vT ·M · ~w)T =
= ~wT ·MT · ~v =
= ~wT ·M · ~v =
= gM(~w,~v)
A 4.3-as összefüggés pontosan megegyezik a 4.1-es sajátidők közötti összefüggéssel.Tehát ebben az új metrikában megkaptuk, hogy a vektor hossza éppen a 4.1-es
27

összefüggést eredményezi. Ha ∆xc·∆t < 1, akkor gM(~w, ~w) > 0, ha ∆x
c·∆t = 1, akkorgM(~w, ~w) = 0, valamint, ha ∆x
c·∆t > 1, akkor gM(~w, ~w) < 0. A fenti vektorokat idő-szerű, fényszerű valamint térszerű vektoroknak nevezzük.Ez alapján fel rajzolható a következő ábra, amit fénykúpnak szoktak nevezni. A
4.2. ábra. Fénykúp
gM(~w, ~w) = 0 azt jelenti, hogy a sajátideje a fénynek 0, azaz, ha fénysebességgelutazunk, akkor nem telik az idő. Ilyen például a (299792(km), 0, 0, 1) vektor. AgM(~w, ~w) > 0 azt jelenti, hogy a ~w időszerű, azaz fénysebesség alatt közlekedik,míg a harmadik eset azt jelentené, hogy fénysebesség felett haladunk, ami ugye nemmegengedett.Mit mondhatunk egy olyan részecske sajátidejére, amely nem egyenletes sebességgelközlekedik? Tudjuk, hogy nem egyenletesen mozgó test a távolság-idő koordináta-rendszerben egy görbét határoz meg. Ezt a görbét jelöljük γ(t)-vel ,ahol t ∈ [0, 1],azaz egy paraméteres görbe.A γ(t)-re azt mondjuk, hogy időszerű görbe, ha ∀t0 időpillanatban γ′(t0) időszerűvektor (görbe deriváltja t0-ban).A görbe ívhossza úgy kapható meg, hogy felbontjuk töröttvonalakká, azaz sok kicsiegyenes szakaszra (infinitezimális szakaszokra) felosztjuk és ezek hosszának össze-gének limesze tart a görbe ívhosszához. A kis szakaszok egyenletes mozgást rep-rezentálnak, amiknek a hossza az utazások sajátideje, az előbbiek miatt. Ebből azkövetkezik, hogy a görbe ívhossza éppen a sajátidőt adja, amit a következő integrállal
28

lehet kiszámítani:
1∫0
√|gM(γ′(t), γ′(t))|dt = sajátideje az utazásnak (4.4)
Tekintsünk egy kicsit vissza az újonnan kapott metrikánkra. Az M mátrix főát-lójában azért szerepelnek azok a − 1
c2illetve 1 tagok, hogyha megszorozzuk M -et
jobbról és balról a ~w vektorral, akkor pontosan a sajátidők közötti 4.1-es összefüg-gést kapjuk. Ez azért kényelmes megoldás, mert nem kell normálnunk a Lorentz-transzformációnál a koordináta áttérés vektorát. Ha − 1
c2helyett csak −1-et írtunk
volna, akkor a következő kifejezés lenne: gM(~w, ~w) = (∆t)2 −∆x2 (ami akkor lenneigaz, ha a távolságot fénysecundumban mérnénk).Belátható, hogy furcsa mód nem teljesül a háromszög-egyenlőtleség. Ahhoz, hogy eztbelássuk először be kell látnunk, hogy Lorentz transzformáció invariáns (távolságtar-tó) erre az új „metrikára”. Ehhez újra fel kell idézni, a Lorentz-féle transzformációt,amit immáron mátrixos alakban fogunk feltüntetni.
x′
y′
z′
t′
=
γ 0 0 −γ v
0 1 0 0
0 0 1 0
−γ vc2
0 0 γ
·x
y
z
t
x
y
z
t
=
γ 0 0 γ v
0 1 0 0
0 0 1 0
γ vc2
0 0 γ
·x′
y′
z′
t′
A fenti két mátrixokkal megadott egyenletrendszer pontosan a Lorentz transzformá-ciós képeleteket írja le.Ezeket felhasználva lássuk be, hogy a fenti „metrika” távolságtartó. Nézzük meg avessző nélküli rendszerre, azaz a fenti mátrixal reprezentált második egyenletrend-szer baloldalán lévő oszlopvektor hossza egyenlő kell hogy legyen az első egyenlet-
29

rendszer jobb oldalán lévő mátrix szorzásból származó vektor hosszával. ~k :=
x
y
z
t
és ~l :=
γ 0 0 −γ v
0 1 0 0
0 0 1 0
−γ vc2
0 0 γ
·x
y
z
t
. Először vegyük a ~k vektor hosszát az új
metrikánkban. Azaz:
gM(~k,~k) = ~kT ·M · ~k = t2 − (x2 + y2 + z2
c2)
Kéne, hogy ~l hossza megegyezzen t2 − (x2+y2+z2
c2) kifejezéssel (megj.: h := −y2+z2
c2),
vagyis:
gM(~l,~l) = ~lT ·M ·~l =
= h+−γ2 · x2 + 2 · γ2 · x · v · t− γ2 · v2 · t2
c2+ γ2 · t2 − 2 · γ2 · t · v
c2· x+ γ2 · v
2
c4· x2 =
= h+−γ2 · x2 − γ2 · v2 · t2
c2+ γ2 · t2 + γ2 · v
2
c4· x2 =
= h+ γ2 ·(−x
2
c2− v2 · t2
c2+ t2 +
v2
c4· x2
)=
= h+ γ2
[−x
2
c2·(
1− v2
c2
)+ t2 ·
(1− v2
c2
)]=
= t2 − x2 + y2 + z2
c2
Az eredményhez azt használtuk ki, hogy γ2 = 1
1− v2
c2
, amivel a végén leosztva meg-
kaptuk, hogy erre a különös metrikára a Lorentz- féle transzformáció megtartja ahosszt, azaz invariáns a transzformációra.Sőt nem csak a hosszt tartja meg, hanem a belső szorzatot is az alábbi algebrai
30

trükk miatt.Eddig azt kaptuk, hogy gM(~w, ~w) = g′M( ~w′, ~w′), ahol g′M( ~w′, ~w′) a mozgó megfigyelőK ′ koordinátarendszeré-ben a metrika szerinti belső szorzat, azaz M ′ = M . Nézzükmeg, hogy tetszőleges vektorokra mit kapunk. Legyen ~w1, ~w2 ∈ R4.Ekkor gM( ~w1 + ~w2, ~w1 + ~w2) = gM( ~w′1 + ~w′2,
~w′1 + ~w′2) a fentiek miatt. Bontsuk kimindkét oldalt:
gM( ~w1 + ~w2, ~w1 + ~w2) = gM( ~w1, ~w1) + gM( ~w2, ~w2) + 2 · gM( ~w1, ~w2)
gM( ~w′1 + ~w′2,~w′1 + ~w′2) = gM( ~w′1,
~w′1) + gM( ~w′2,~w′2) + 2 · gM( ~w′1,
~w′2)
Azt látjuk, hogy gM( ~w1, ~w2) = gM( ~w′1,~w′2) vagyis a vegyes tagokra is invariáns a
transzformáció.Végül nézzük meg, hogy miért nem teljesül a háromszög egyenlőtlenség. Ehhez te-kintsük a következő példát.A K rendszerbeli megfigyelőnk üljön az origóban ami az A = (0, 0, 0, 0) tér-idő ese-ményt jelenti és helyzetét nem változtatva mérje az időt a tB időpontig, formálisanB = (0, 0, 0, tB). Ez idő alatt a mozgó megfigyelő haladjon egyenletes sebességgelA-ból C-be, majd C-ből B-be.A 4.3-as ábrán látható, hogy azt kéne megvizsgálni, hogy az
−→AB hosszabb mint
−→AC+
−→CA, ahhoz, hogy a háromszögegyenlőtlenség ne teljesüljön. Ennek belátásához
4.3. ábra.−→AB ≥
−→AC +
−→CA
vegyük a 4.3-as képletet, azaz: gM(~w, ~w) = ∆t2−∆x2
c2. Az előző fejezetek alapján már
tudjuk, hogy a mozgó rendszerben lévő megfigyelőnek a sajátideje kevesebb, mintaz álló megfigyelőnek, továbbá mivel ez az új metrika a vektor hosszával jellemzi a
31
sajátidőt (gM) ezért pont azt kapjuk, hogy:−→AB ≥
−→AC +
−→CA.
Összefoglalva azt kaptuk, hogy vektor hosszával tudjuk reprezentálni a sajátidő-ket, amihez csak annyit kellett felhasználnunk, hogy: (∆t′)2 = (∆t)2 − ∆x2
c2, ebből
a feltevésből levezettük az új metrikánkat, aminek a neve Minkowski-metrika. Lát-tuk, hogy nem teljesül a háromszög egyenlőtlenség illetve, hogy nem egyenesvonalúegyneletes mozgást végző test sajátideje a görbe infinitezimális szakaszokra bontottvektorok hosszának összege, aminek eredményét egy integrál szolgáltatja. A három-szög egyenlőtlenséghez hasonlóan belátható, hogy két pont között nem az egyenes alegrövidebb távolság, mint ahogyan azt megszoktuk az Euklideszi metrikában, mivelitt a hossz az sajátidőt fejez ki és láttuk, hogy mozgó testnek lassabban telik az idő.A következő fejezetben látni fogjuk a méltán híres E = m · c2 képlet levezetését,amihez csupán két feltétel szükséges (a mi speciális esetünkben, azaz, hogy csak xtengely mentén mozgunk).
32

5. fejezet
A tömeg és az energia ekvivalencia
Albert Einstein által 1905-ben publikált képlet azt mondja ki, hogy egy test nyu-galmi energiája megegyezik a tömegének és a fénysebesség négyzetének szorzatával,azaz:E = m · c2.Megmutatjuk, hogyan lehet levezetni a fenti képletet kihasználva a Lorentz-féletranszformációt valamint a mozgási energiát illetve az impulzus megmaradás tör-vényét. Valamint engedjük meg, hogy egy test tömegét a megfigyelők különbözőenmérik ki, hasonlóan, ahogyan az időt és hosszúságot is máshogyan méri a két meg-figyelő.
5.1. Előkészületek
Először vezessünk be a mozgási energiát illetve az impulzust, amiket nem vezetünkle csak felhasználunk.
I. Mozgási energia: E = 12·m · v2
II. Impulzus: I = m · v Valamint szükségünk lesz a Lorentz transzformációnállevezetett sebességre vonatkozó transzformációra, vagyis ki hogyan látta a sebességet(K illetve K ′ rendszerbeli megfigyelők). Mivel megint azt a speciális esetet nézzük,amikor aK ′ rendszer v állandó sebességgel halad x tengely irányába ezért az y illetvez tengely irányába nem történik sebességváltozás.
33

Vagyis: (Lorentz transzformációnál már levezettük)
ux =u′x + v
1 + vc2· u′x
(5.1)
5.2. Kísérlet
Vegyünk egy bombát -a K ′ rendszerben amely állandó u sebességgel halad x tengelyirányába K rendszerhez képest-, melynek tömege M0 és amely valamilyen erő hatá-sára két részre bomlik. Tegyük fel, hogy a két rész tömege megegyezik, ami legyenmu és a két rész a robbanás után ellentétes irányba halad ugyanakkora sebességgel,ami megegyezik a rendszer sebességével (−v′1 = v′2 = u). A K rendszerbeli megfigye-
5.1. ábra. A K ′ rendszerben a robbanás előtt és után
lő máshogyan látja a sebességeket, amire alkalmazzuk az 5.1-es összefüggést. Mivel
5.2. ábra. A K rendszerben a robbanás előtt után
a K rendszer sebessége a K ′ rendszerhez képest éppen megegyezik a benne utazóm0 tömegű részecske sebességével, valamint v′3 = u ezért:
v3 =v′3 + u
1 + uc2· v′3
=2 · u
1 + u2
c2
(5.2)
Az ábrákon látszik, hogy a robbanás előtti tömeg különböző a két rendszerben,viszont ezt a fejezet elején feltettük, hogy a tömeg is transzformálódik az idő éshosszúsághoz hasonlóan.Tegyük fel a következőket:I. A teljes tömeg megmarad, azaz: mv +m0 = Mu
II. Az impulzus is konzerválódik, tehát: mv · v3 +m0 · 0 = Mu · u
34

Ebből a két egyenletből álló egyenletrendszerből azt kapjuk, hogy:
mv +m0 = Mu = mv ·v3
u= mv ·
2
1 + u2
c2
Itt felhasználtuk, hogy v3 = 2·u1+u2
c2
Melyekből azt kapjuk, hogy:
m0 = mv ·
(2
1 + u2
c2
− 1
)(5.3)
= mv ·
(2− 1− u2
c2
1 + u2
c2
)(5.4)
= mv ·1− u2
c2
1 + u2
c2
(5.5)
Ezzel az a probléma, hogy a jobb odlalon van u és v is, az egyik a K ′-beli megfigye-lőhoz tartozik a másik pedig a K- beli megfigyelőhöz vagy a K rendszeren belül azegyik a robbanás előtti v2 = u sebessége a bombának, a másik a robbanás utáni tö-mege az egyik részecskének, azaz „vagy rendszerek keverednek” vagy az „előtte-utána”mennyiségek, ezért szeretnénk, csak a K rendszer robbanás utáni mennyiségeivel ki-fejezni a jobb oldalt.Mivel a baloldalt álló m0 a K rendszerbeli megfigyelőhöz tartozik, ezért meg kelleneszabadulnunk u-tól. Ehhez használjuk fel a Lorentz transzformációnál levezetett γfüggvényünket. Eml.: γ = 1√
1−( v3c )
2
1
γ2= 1− v2
3
c2= 1−
4·u2c2
(1 + u2
c2)2
= (5.6)
=1 + 2·u2
c2+ u4
c4− 4·u2
c2
(1 + u2
c2)2
= (5.7)
=(1− u2
c2)2
(1 + u2
c2)2
(5.8)
Az 5.8-as egyenlet pontosan az 5.5-ös egyenletben az mv szorzójának a négyzete.Tehát kiküszöböltük ezzel az egyszerű fogással azt, hogy az 5.5-ös egyenlet ne függjön
35

u-tól, azaz:
mv =m0√1− v23
c2
= γ ·m0 (5.9)
Az 5.9-es összefüggés azt jelenti, hogy a nyugalmi tömeg kisebb, ha a sebesség össze-mérhető a fénysebességgel azaz v3
c→ 1. Ez pontosan az amit a fejezet elején fel-
tettünk, hogy hasonlóan az időhöz és a távolsághoz, a tömeg is transzformálódik. Afenti m0-át a szakirodalomban relativisztikus vagy nyugalmi tömegnek nevezik.Mi történik a γ ·m0 szorzattal, ha v3
c→ 0?(azaz a sebesség elenyésző c-hez képest).
Ha ez a hányados 0-hoz tart, akkor az 5.9-es összefüggésből látszik, hogy mv = m0,hasonlóan a sajátidő és sajáttávolsághoz.A megfelelő eredmény érdekében vegyük a γ ·m0 szorzat Taylor-sorát. Fejtsük sorbaa 0 körül 1√
1−( v3c )
2 -et úgy, hogy t :=(v3c
)2. Az általános Taylor-sor összegfüggvénye:
T (t) =∑∞
n=0f (n)(0)n!· tn.
Ezt felhasználva szükségünk lesz az f(t) = 1√1−t függvény néhány deriváltjára, hogy
megsejtsük az f (n)(t) általános elemet.
f (1)(t) =1
2· (1− t)−
32
f (2)(t) =1 · 32 · 2
· (1− t)−52
f (3)(t) =1 · 3 · 52 · 2 · 2
· (1− t)−72
A fenti deriváltak alapján a következőt kapjuk az általános elemre:
f (n)(t) =
∏nk=1(2 · k − 1)
2n· (1− t)−
2·n+12
A fenti elemet kell a 0-ban venni, azaz:
f (n)(0) =
∏nk=1(2 · k − 1)
2n
A Taylor sor felírásához meg kell nézni, hogy hol konvergens. Annak kell teljesülnie,hogy |t| < 1, viszont ez teljesül, mivel t = v3
c< 1. Melyből már fel tudjuk írni f(t)
36

Taylor-sorát, de emlékezzünk, hogy t =(v3c
)2, vagyis:
1√1−
(v3c
)2·m0 =
∞∑n=0
∏nk=1(2 · k − 1)
2n · n!·(v2
3n
c2n
)·m0 (5.10)
Az 5.10-es sornak írjuk fel az első pár elemét.
γ ·m0 = m0 +1
2·m0 ·
v23
c2+
3
8·m0 ·
v43
c4+ ... (5.11)
Az első tag a nyugalmi tömeg a második pedig a mozgási energia, amelyet a fejezetelején leírtunk, viszont itt osztva van c2-tel. Ha felszorozzuk az 5.11-es sort c2-tel,akkor a következőt kapjuk:
γ ·m0 · c2 = m0 · c2 +1
2·m0 · v2
3 +3
8·m0 ·
v43
c2+ ... (5.12)
Azt látjuk, hogy megjelent a sor első tagjaként az m0 · c2, amit nyugalmi energiánakhívunk a sor második tagja pedig pontosan a mozgási energia, viszont a harmadiktagtól a sor összege közel 0 mivel a v3
chányadosok 0-hoz tartanak, ha v3 „kicsi”.
Mivel az 5.12-es sorfejtésben energiák összegge szerepel, ezért maga az összeg isenergia, azaz:
E = m0 · c2 (5.13)
Amit úgy kapunk, ha v3 = 0, mivel ilyenkor az első tag kivételével eltűnik a sortöbbi tagja, valamint γ = 1 ebben az esetben.Az 5.13-as összefüggés azt mondja meg, hogy egy testnek akkor is van energiája,amikor nem végez mozgást, amit nyugalmi energiának nevezünk.
A fejezet elején leírt előkészületek alapján valamint egy megfelelő kísérletbőlle tudtuk vezetni Albert Einstein híres képletét (egy speciális esetre láttuk), amitabban az időben rajta kívül nem sokan értettek, mivel akkoriban nehezebben érthetőeszközök áltak rendelkezésére, hogy fel tudja írni az 5.13-as képletet.Valamint ne feledjük, hogy mi az összes fejezetben azt a speciális esetet vettük,hogy a K ′-beli mozgó megfigyelő az x tengely irányába haladt állandó nagyságúsebességgel K megfigyelőhöz képest.
37

6. fejezet
Összefoglalás
A klasszikus fizikából kiindulva vagyis, hogy a sebességek összeadódnak illetve kivo-nódnak egymásból attól függően, hogy mihez képest mozognak a testek (Galilei-féletranszformáció) eljutottunk oda,-azt a tényt kihasználva, hogy a fénysebességet sem-mi sem lépheti át-, hogy a közel fénysebességgel utazó (egyK ′ rendszerben ami állan-dó v sebességgel mozog K-hoz képest) különbözően méri azi időt illetve hosszúságotegy hozzá képest álló megfigyelőhöz képest, amelyeket a Lorentz transzformáció fog-lal össze.A továbbiakban bevezetésre került egy új metrika, amelyben könnyebben kezelhe-tővé vált a sajátidőre vonatkozó képlet (melyet a vektor hosszával reprezentáltunk)valamint összefüggést adott nem csak egyenesvonalú mozgásokra is (görbe ívhossza,amit egy integrállal kapunk).A szakdolgozat végén pedig a Lorentz transzformációt illetve néhány energiameg-maradási törvényt felhasználva megkaptuk a nyugalmi energiát (egy speciális meg-figyelés esetén), vagyis az E = m · c2 képletet.
38

Irodalomjegyzék
[1] Philip Harris, Special Relativity, University of Sussex, https://web.stanford.edu/~oas/SI/SRGR/notes/srHarris.pdf
[2] Lambert E. Murray, Department of Physical Science Harding University, Searcy,2012, http://www.harding.edu/lmurray/modern_files/special_relativity.pdf
[3] S.S. Komissarov, Special relativity, University of Leeds, 2012, https://www1.maths.leeds.ac.uk/~serguei/teaching/gr.pdf
[4] Jacques Bros, Service de Physique Théorique, C.E. Saclay, 91191 Gif-sur-Yvette,France, http://bourbaphy.fr/bros.pdf
[5] Newton törvények ,https://hu.wikipedia.org/wiki/Newton_t%C3%B6rv%C3%A9nyei
[6] Müonok, https://hu.wikipedia.org/wiki/M%C3%BCon
[7] Fénysebesség, https://hu.wikipedia.org/wiki/F%C3%A9nysebess%C3%A9g
39