anno accademico 2010/11, laurea triennale, edizione diurna ... · spostamento eseguito...
TRANSCRIPT

Lezione n. 3 (2 ore)
Carlo PaganiDipartimento di Fisica – Laboratorio LASA
Via F.lli Cervi 201, 20090 Segrate (Milano)
web page: http://wwwsrf.mi.infn.it/Members/pagani
e-mail: [email protected]
Università degli Studi di MilanoFacoltà di Scienze Matematiche Fisiche e NaturaliCorsi di Laurea in: Informatica ed Informatica per le Telecomunicazioni
Anno accademico 2010/11, Laurea Triennale, Edizione diurna
FISICA
Gianluca ColòDipartimento di Fisica – sede
Via Celoria 16, 20133 Milano
web page: http://www.mi.infn.it/~colo
e-mail: [email protected]
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 2
Meccanica
La Meccanica è la branca della Fisica che studia il moto dei corpi in sè(Cinematica), il moto in relazione alle forze che lo fanno variare (Dinamica),e le condizioni di equilibrio delle forze che mantengono un corpo in quiete (Statica)
– La Cinematica descrive il moto dei corpi senza fare riferimento esplicito alle forze che agiscono su di essi
– La Dinamica è lo studio della relazione esplicita tra le forze ed il loro effetto sul moto
– La Statica studia le condizioni che mantengono un corpo in quiete
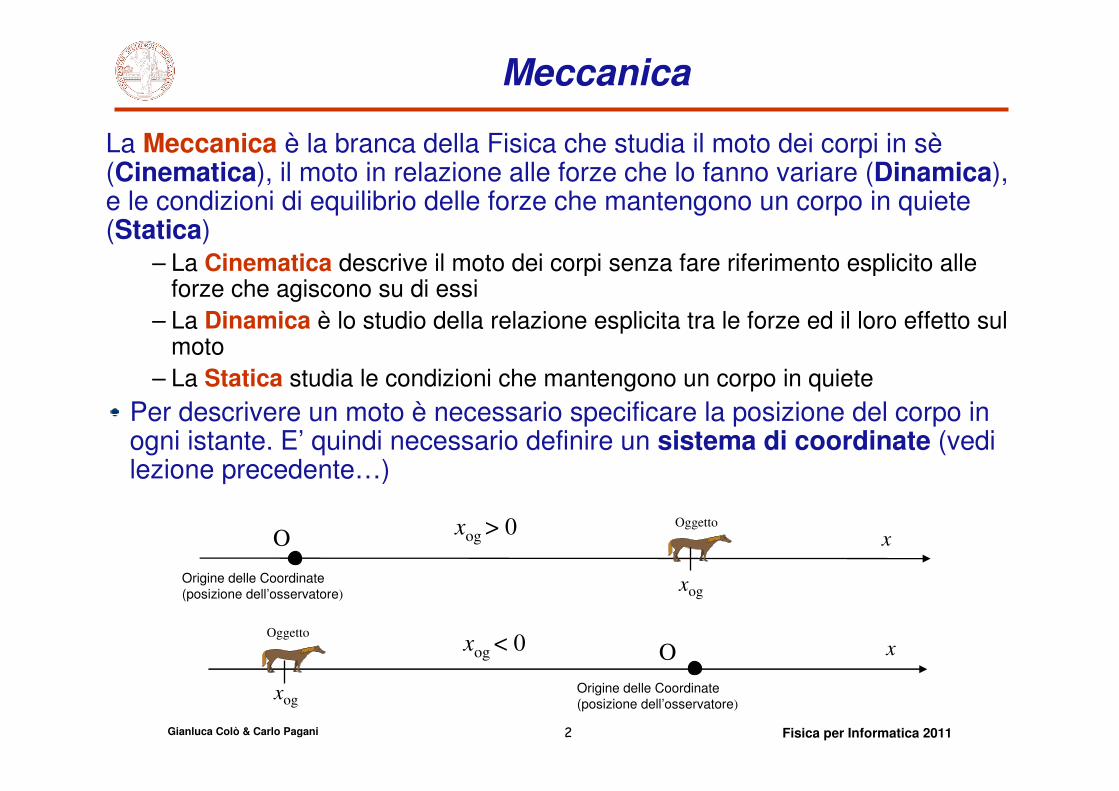
Per descrivere un moto è necessario specificare la posizione del corpo in ogni istante. E’ quindi necessario definire un sistema di coordinate (vedi lezione precedente…)
Origine delle Coordinate
(posizione dell’osservatore)
OOggetto
Origine delle Coordinate
(posizione dell’osservatore)
OOggetto
xog
xog
x
x
xog > 0
xog < 0
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 3
Cinematica
Per descrivere il moto di un corpo è necessario fornire, in ogni istante di tempo, la sua posizione, la sua velocità e la sua accelerazione
Per poterlo fare è necessario fissare un sistema di coordinate e un
istante di tempo, t0 , da cui facciamo partire la nostra descrizione del
moto
Il punto P(x,y,z) si muoverà in funzione del tempo t e sarà quindi più
propriamente descritto dalla notazione P(x(t),y(t),z(t))
Così come le coordinate, (x(t), y(t), z(t)), sono misurate rispetto
all’origine del sistema di coordinate scelto, anche il tempo t sarà
misurato a partire da t0
La velocità e l’accelerazione sono grandezze vettoriali poiché ènecessario conoscerne, oltre al valore, anche la direzione ed il verso
I vettori velocità, v, e accelerazione, a, sono applicati nel punto P
Sappiamo inoltre che anche alla posizione del punto possiamo dare
una descrizione vettoriale: r = (rx i , ryj , rzk) = (x i ,yj , zk)
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 4
Moto di un punto in un piano e traiettoria
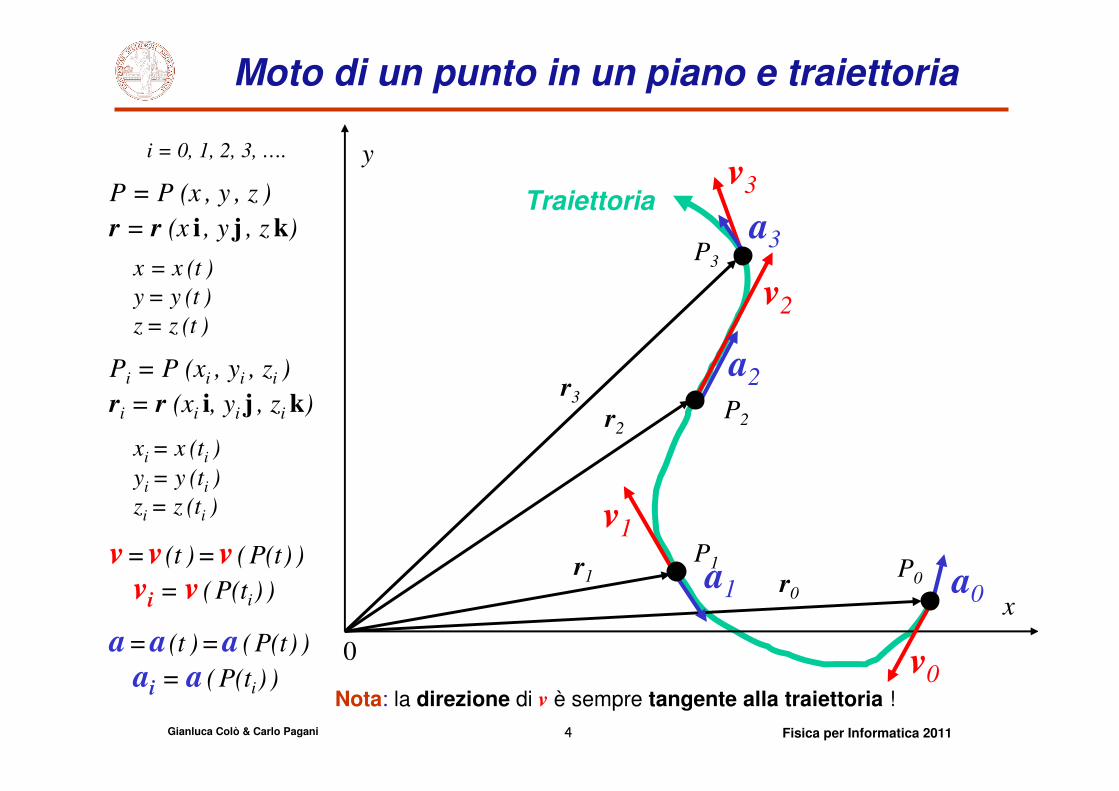
i = 0, 1, 2, 3, ….
P = P (x , y , z )
r = r (x i , y j , z k)
x = x (t )
y = y (t )
z = z (t )
Pi = P (xi , yi , zi )
ri = r (xi i, yi j , zi k)
xi = x (ti )
yi = y (ti )
zi = z (ti )
v=v (t )=v (P(t) )
vi = v (P(ti) )
a=a (t )=a (P(t) )
ai = a (P(ti) )
Traiettoria
a0P0
y
x
P3
P2
P1
r0
r1
r2
r3
v1
v2
v3
v0
a1
a3
a2
0
Nota: la direzione di v è sempre tangente alla traiettoria !

Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 5
Spostamento di un punto e velocità media
Come è naturale fare, si definisce spostamento s di un punto P dalla
posizione P1 alla posizione P2 (più propriamente s12) il vettore che
congiunge r1 a r2, con verso da r1 a r2
Si vede subito che tra i vettori
r1 , r2 e s valgono le relazioni:
r1 + s12 = r2
s12 = r2 – r1 s12 ≡ r2 – r1
La velocità è definita come lo spostamento eseguito nell’unità di tempo
La velocità media da P1 a P2 è:
<v> = (r2 – r1 ) / ( t2 - t1 ) = s12 / ∆t
ed ha la direzione e il verso di s12
La velocità istantanea nel punto P1 , all’istante t1 , si ottiene come
caso limite quando lo spostamento tra i punti P1 e P2 tende a zero
y
x
P2
P1r1
r2
0
s12
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 6
Velocità istantanea
La velocità istantanea di un oggetto, rappresentato dal punto
P (x (t) ,y (t) , z (t) ), all’istante generico t, è la velocità che il punto ha esattamente
all’istante t. Cioè è la velocità media tra due punti infinitamente vicini, o tra due
istanti di tempo infinitamente prossimi
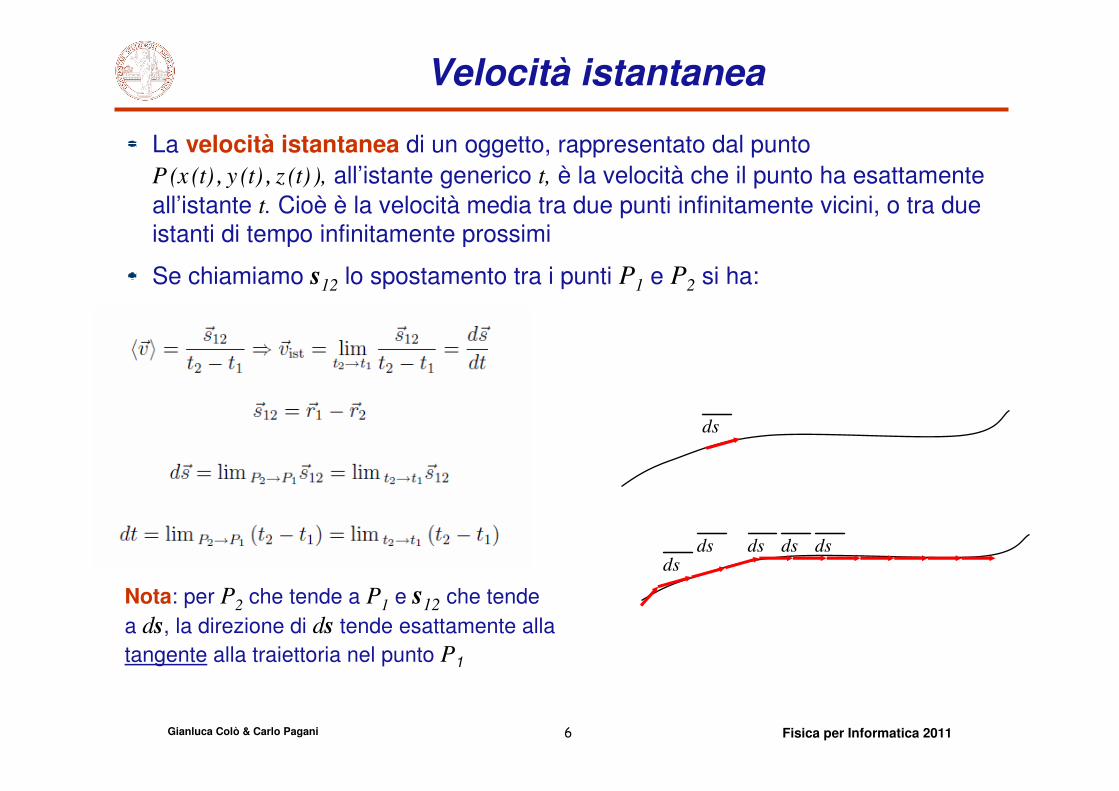
Se chiamiamo s12 lo spostamento tra i punti P1 e P2 si ha:
Nota: per P2 che tende a P1 e s12 che tende
a ds, la direzione di ds tende esattamente alla
tangente alla traiettoria nel punto P1
ds
ds ds ds dsds
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 7
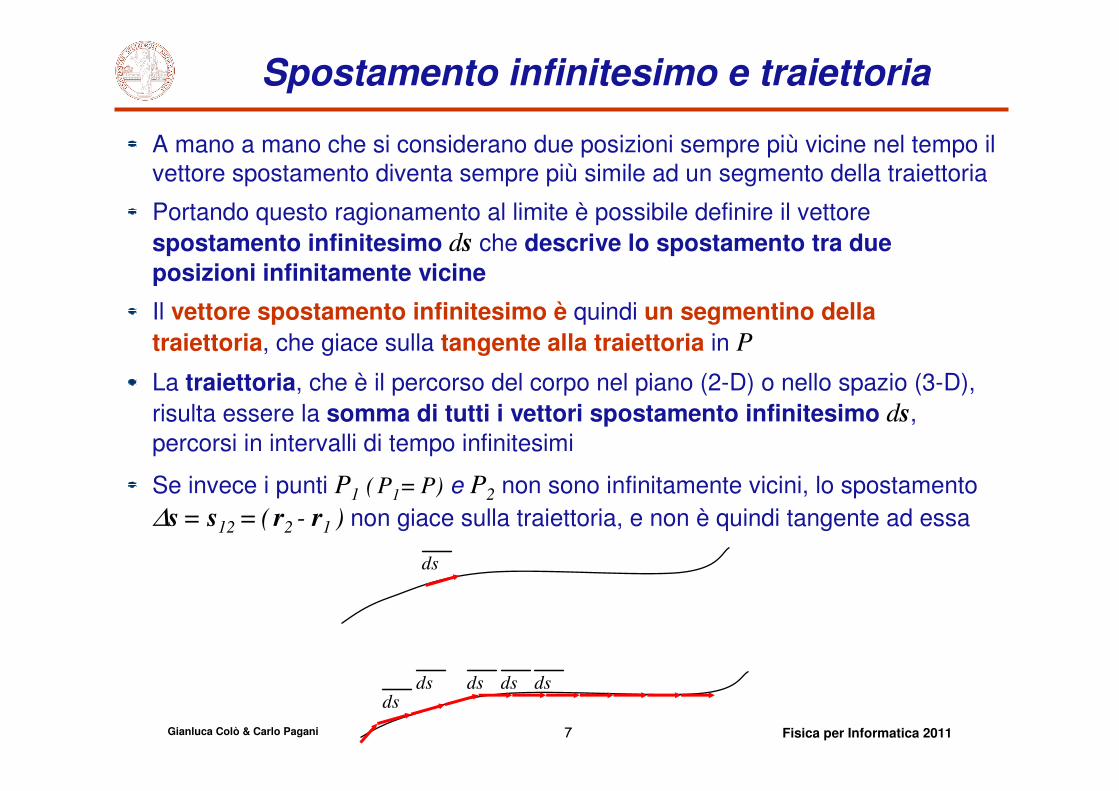
Spostamento infinitesimo e traiettoria
A mano a mano che si considerano due posizioni sempre più vicine nel tempo il
vettore spostamento diventa sempre più simile ad un segmento della traiettoria
Portando questo ragionamento al limite è possibile definire il vettore
spostamento infinitesimo ds che descrive lo spostamento tra due
posizioni infinitamente vicine
Il vettore spostamento infinitesimo è quindi un segmentino della
traiettoria, che giace sulla tangente alla traiettoria in P
La traiettoria, che è il percorso del corpo nel piano (2-D) o nello spazio (3-D),
risulta essere la somma di tutti i vettori spostamento infinitesimo ds,
percorsi in intervalli di tempo infinitesimi
Se invece i punti P1 ( P1= P) e P2 non sono infinitamente vicini, lo spostamento
∆s = s12 = ( r2 - r1 ) non giace sulla traiettoria, e non è quindi tangente ad essa
ds
ds ds ds dsds
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 8
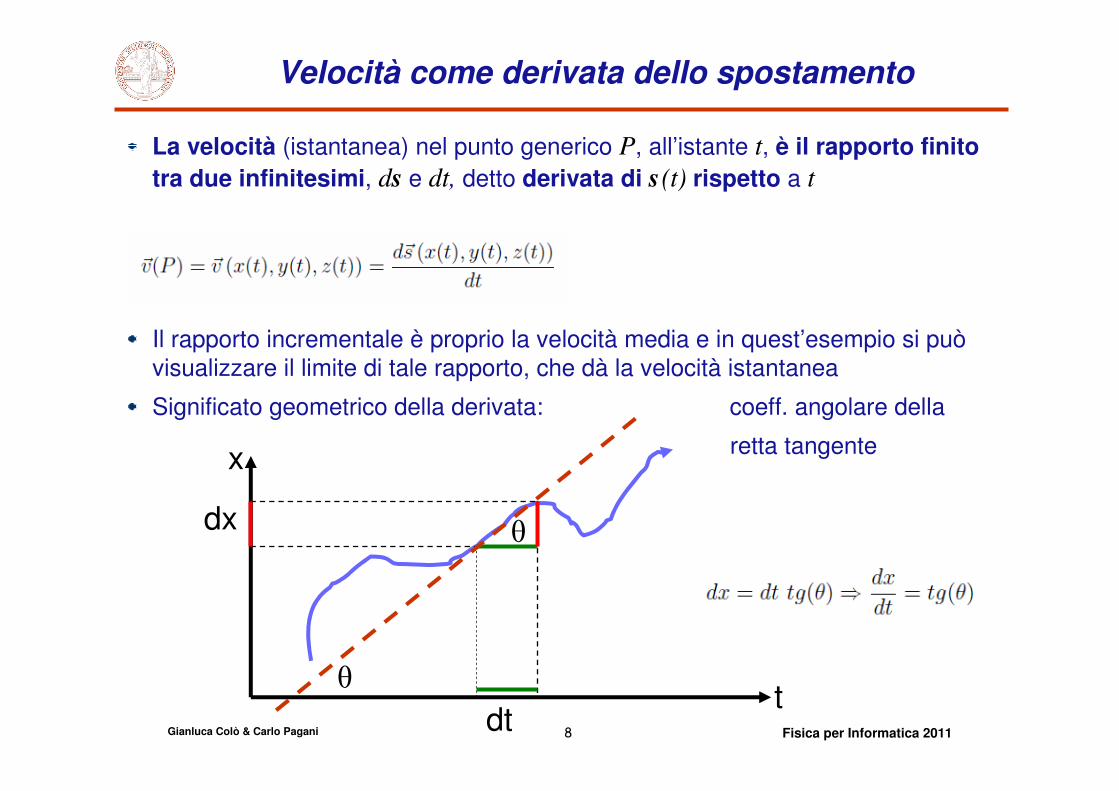
Velocità come derivata dello spostamento
La velocità (istantanea) nel punto generico P, all’istante t, è il rapporto finito
tra due infinitesimi, ds e dt, detto derivata di s(t) rispetto a t
Il rapporto incrementale è proprio la velocità media e in quest’esempio si può
visualizzare il limite di tale rapporto, che dà la velocità istantanea
Significato geometrico della derivata: coeff. angolare della
retta tangentex
t
dx
dt
θ
θ
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 9
Legge (equazione) oraria
Il disegno appena visto è un esempio NON di traiettoria ma di legge oraria !
Nella traiettoria, t è un parametro e si mostra il moto nello spazio reale
La legge oraria è l’equazione che descrive la posizione del punto P in
funzione del tempo
Nel Sistema cartesiano … … o polare:
P = P (x(t) , y(t) , z(t) ) P = P (r(t) , θ(t) , φ(t) )
r = r (x(t) , y(t) , z(t) ) r = r (|r(t)| , θ(t) , φ(t) )
sono esempi di leggi orarie
Ogni moto ha una specifica legge oraria esplicita che lo descrive
Esempi monodimensionali:
x(t) = A t2+C, x(t) = A cos (ωt+α), x(t) = A t + C
Nota: A, C, α e ω sono costanti che dipendono sia dai dati del problema, sia
dalla posizione e dalla velocità del punto all’istante t = 0
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 10
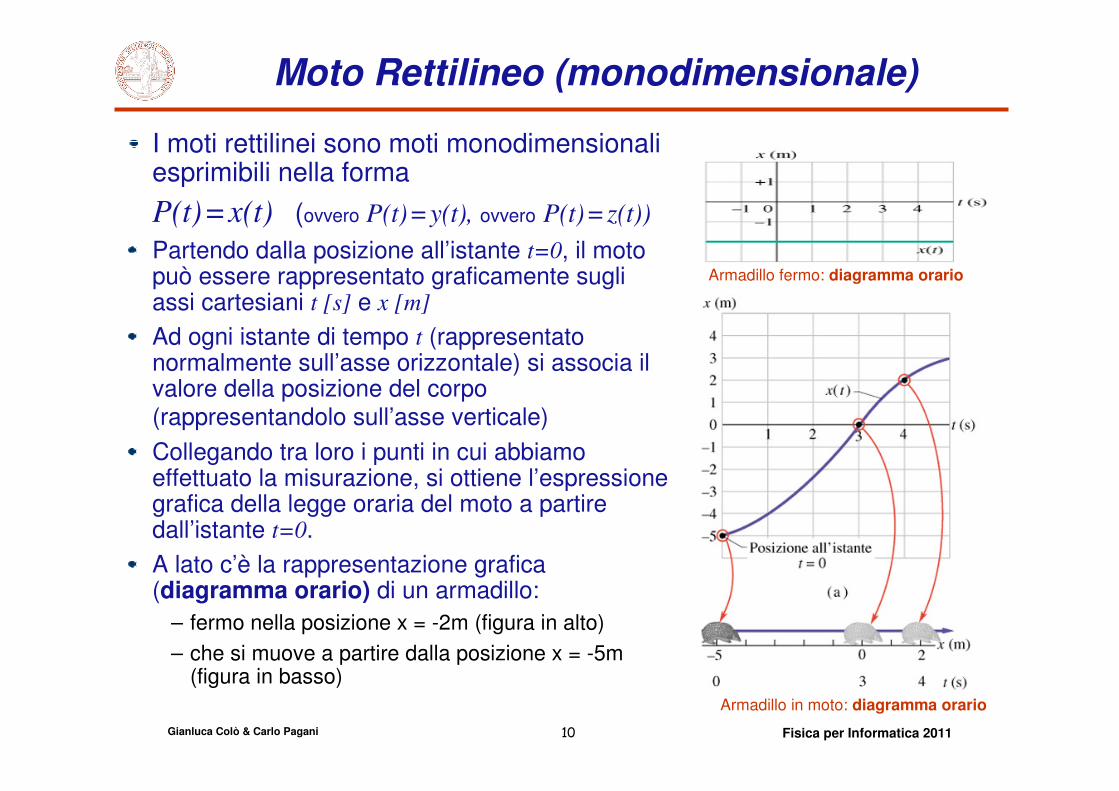
Moto Rettilineo (monodimensionale)
I moti rettilinei sono moti monodimensionali esprimibili nella forma
P(t)=x(t) (ovvero P(t)=y(t), ovvero P(t)=z(t))
Partendo dalla posizione all’istante t=0, il moto può essere rappresentato graficamente sugli assi cartesiani t [s] e x [m]
Ad ogni istante di tempo t (rappresentato normalmente sull’asse orizzontale) si associa il valore della posizione del corpo (rappresentandolo sull’asse verticale)
Collegando tra loro i punti in cui abbiamo effettuato la misurazione, si ottiene l’espressione grafica della legge oraria del moto a partire dall’istante t=0.
A lato c’è la rappresentazione grafica (diagramma orario) di un armadillo:
– fermo nella posizione x = -2m (figura in alto)
– che si muove a partire dalla posizione x = -5m (figura in basso)
Armadillo fermo: diagramma orario
Armadillo in moto: diagramma orario
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 11
Velocità in un moto rettilineo
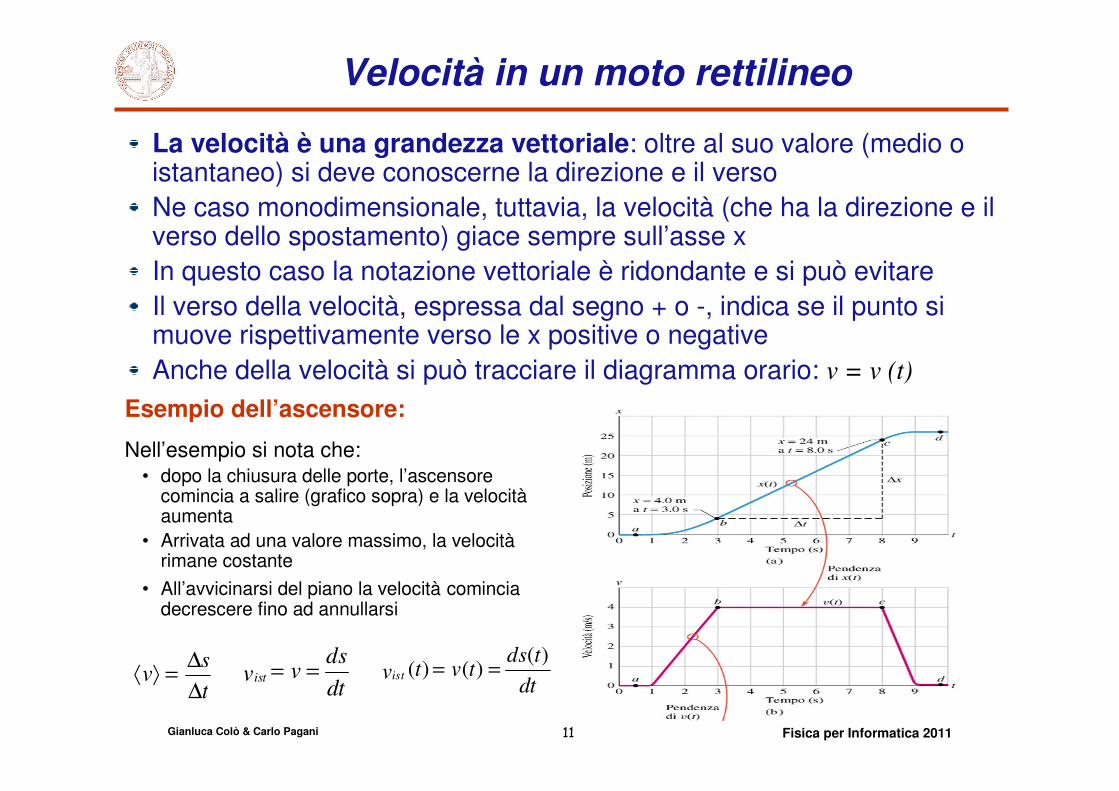
La velocità è una grandezza vettoriale: oltre al suo valore (medio o istantaneo) si deve conoscerne la direzione e il verso
Ne caso monodimensionale, tuttavia, la velocità (che ha la direzione e il verso dello spostamento) giace sempre sull’asse x
In questo caso la notazione vettoriale è ridondante e si può evitare
Il verso della velocità, espressa dal segno + o -, indica se il punto si muove rispettivamente verso le x positive o negative
Anche della velocità si può tracciare il diagramma orario: v = v (t)
Esempio dell’ascensore:
Nell’esempio si nota che:• dopo la chiusura delle porte, l’ascensore
comincia a salire (grafico sopra) e la velocità aumenta
• Arrivata ad una valore massimo, la velocità rimane costante
• All’avvicinarsi del piano la velocità comincia decrescere fino ad annullarsi
t
sv
∆
∆=⟩⟨
dt
dsvvist ==
dt
tdstvtvist
)()()( ==
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 12
Accelerazione in un moto rettilineo
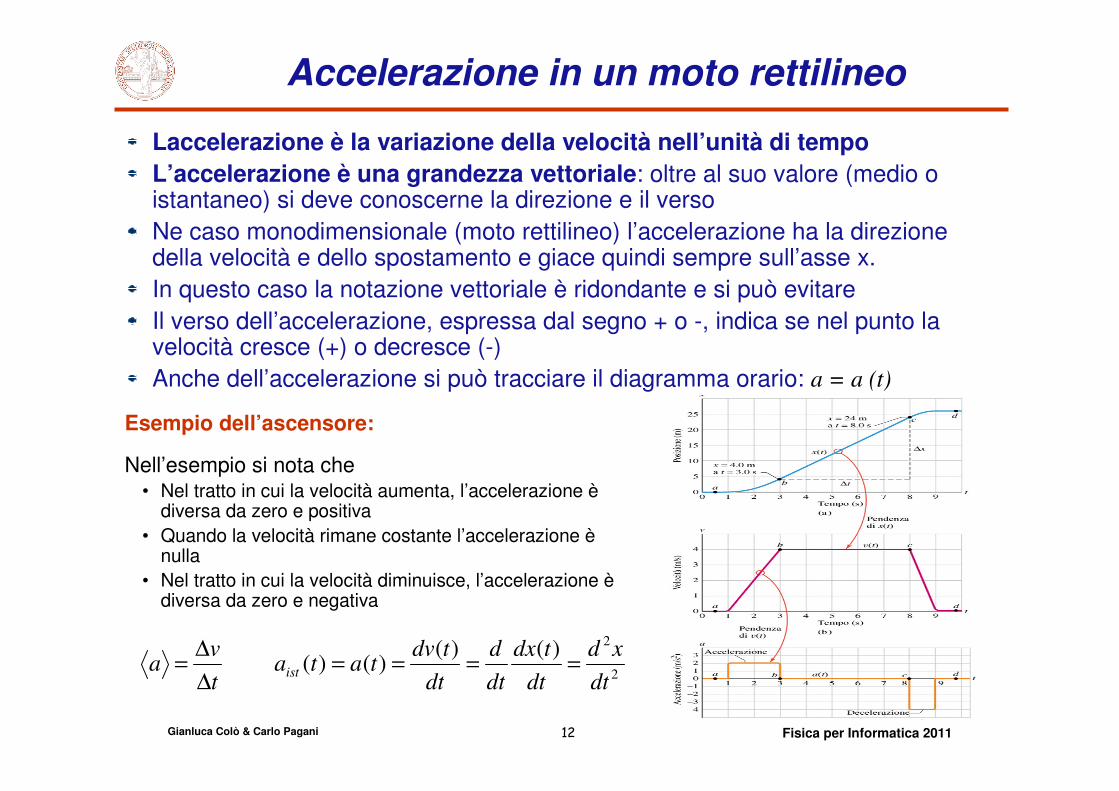
Laccelerazione è la variazione della velocità nell’unità di tempo
L’accelerazione è una grandezza vettoriale: oltre al suo valore (medio o istantaneo) si deve conoscerne la direzione e il verso
Ne caso monodimensionale (moto rettilineo) l’accelerazione ha la direzione della velocità e dello spostamento e giace quindi sempre sull’asse x.
In questo caso la notazione vettoriale è ridondante e si può evitare
Il verso dell’accelerazione, espressa dal segno + o -, indica se nel punto la velocità cresce (+) o decresce (-)
Anche dell’accelerazione si può tracciare il diagramma orario: a = a (t)
Esempio dell’ascensore:
Nell’esempio si nota che• Nel tratto in cui la velocità aumenta, l’accelerazione è
diversa da zero e positiva
• Quando la velocità rimane costante l’accelerazione è nulla
• Nel tratto in cui la velocità diminuisce, l’accelerazione è diversa da zero e negativa
)()(
)()( 2
2
dt
xd
dt
tdx
dt
d
dt
tdvtata
t
va ist ====
∆
∆=
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 13
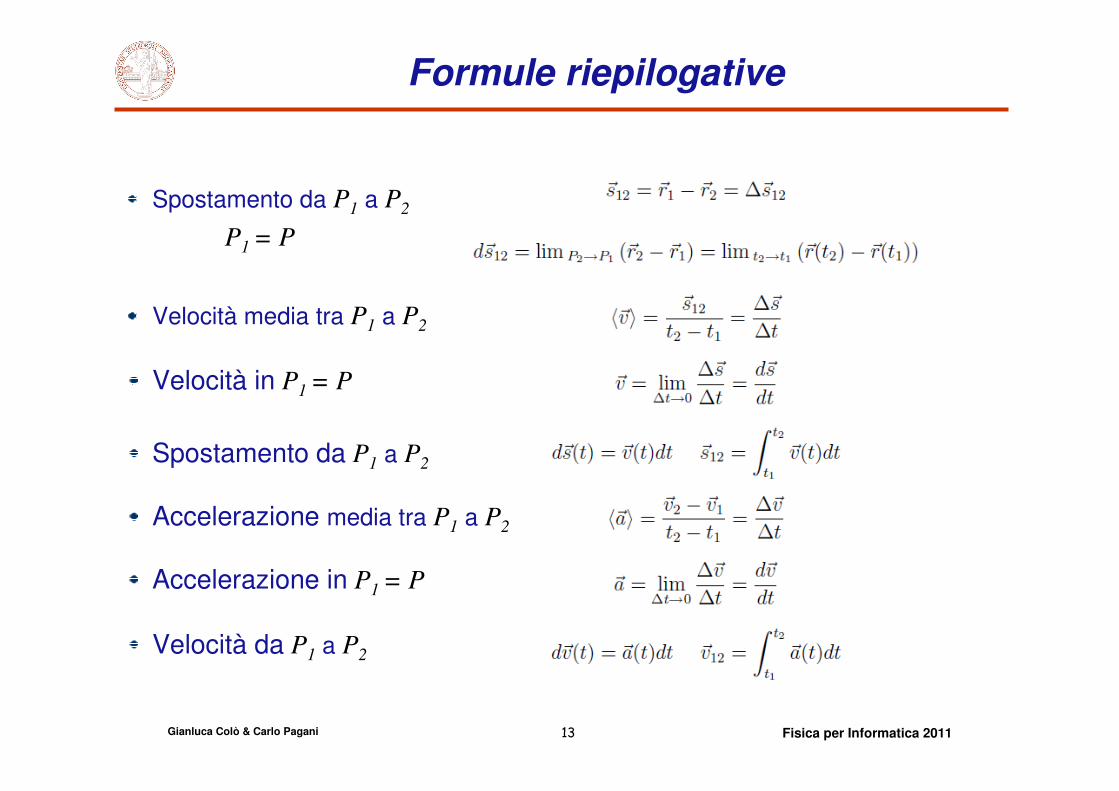
Formule riepilogative
Spostamento da P1 a P2
P1 = P
Velocità media tra P1 a P2
Velocità in P1 = P
Spostamento da P1 a P2
Accelerazione media tra P1 a P2
Accelerazione in P1 = P
Velocità da P1 a P2
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 14
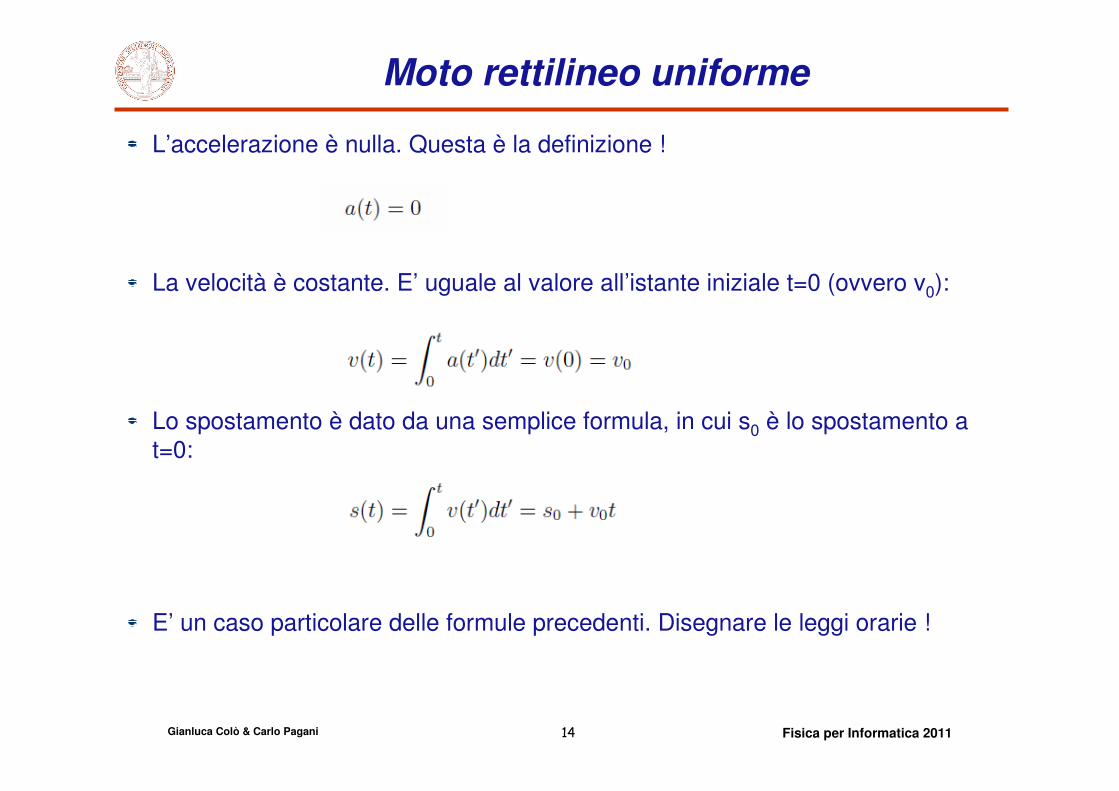
Moto rettilineo uniforme
L’accelerazione è nulla. Questa è la definizione !
La velocità è costante. E’ uguale al valore all’istante iniziale t=0 (ovvero v0):
Lo spostamento è dato da una semplice formula, in cui s0 è lo spostamento a
t=0:
E’ un caso particolare delle formule precedenti. Disegnare le leggi orarie !
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 15
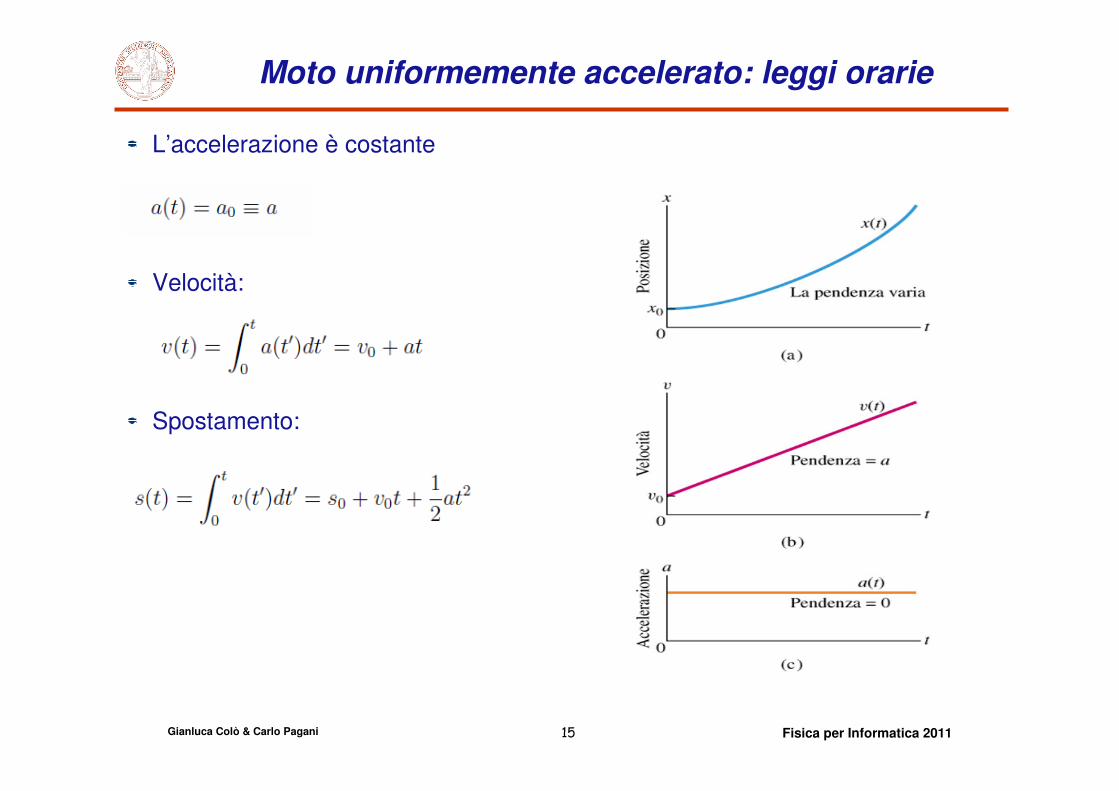
Moto uniformemente accelerato: leggi orarie
L’accelerazione è costante
Velocità:
Spostamento:

Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 16
Esempio numerico
Una Ferrari arriva da ferma alla velocità di 100 km/ora in 3 secondi. Supponendo che l’accelerazione sia costante, determinare:
– Il valore dell’accelerazione
– La velocità raggiunta dopo 2 secondi
Svolgimento:
– Se a=cost=<a> =ao si ha:
– Sappiamo che v (3s) = 100 km/ora = 105 [m] /3600 [s] = 27.8 m/s
– Quindi ao = cost = v(3s)[ms-1] / 3[s] = 27.8/3 = 9.27 [ms-2]
– La velocità dopo 2 secondi è:
v(2s) = ao t = cost t = 9.27[ms-2] 2[s] = 18.5 [m/s] = 18.5(3600/103) [km/ora] →
v(2s) � 68 km/ora
[ ] [ ][ ]
[ ] [ ][ ]
[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]221
2
2121
21
2
)()(
)( :verifica
)()(
)(
−−−
−
−−−−
−−
−
=⋅==
⋅=→=∆
∆=⟩⟨==
msatmsasdt
d
sdt
mstdvmsta
tmsamstvmsast
msvmsa
sdt
mstdvmsta
oo
oo
ao = 9.27 [ms-2]
v(2s) = 18.5 [ms-1] = 68 [km/h]
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 17
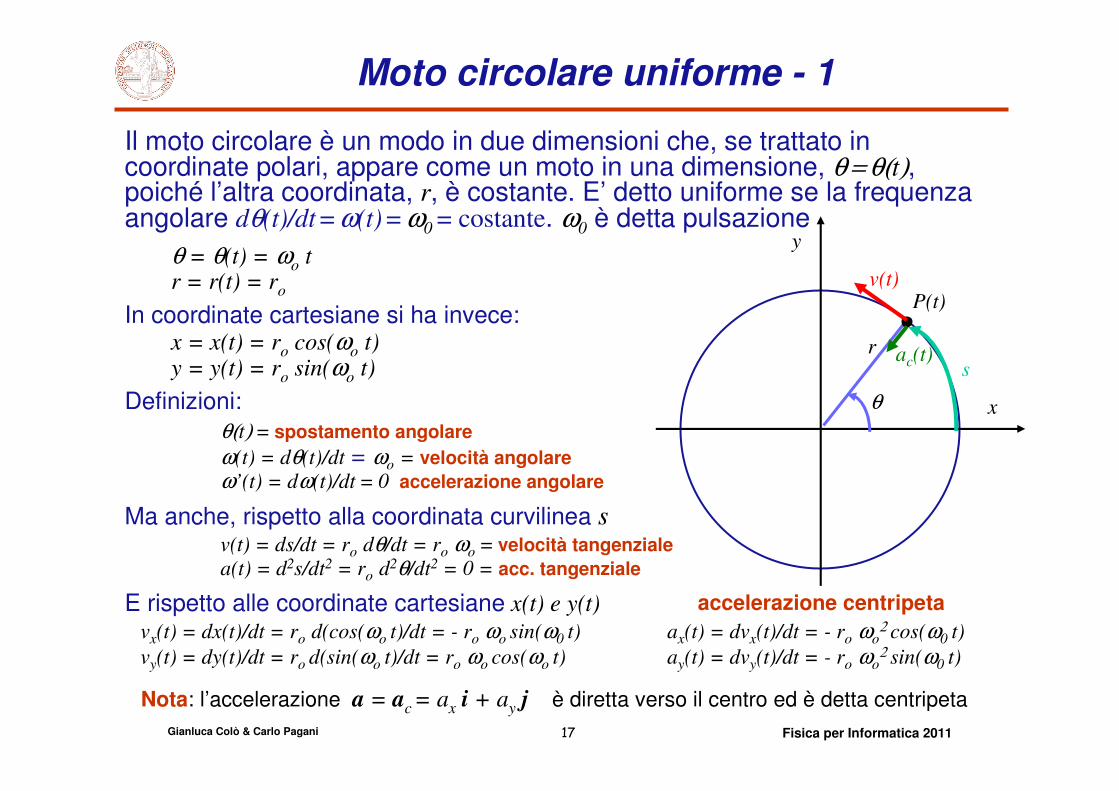
Moto circolare uniforme - 1
Il moto circolare è un modo in due dimensioni che, se trattato in coordinate polari, appare come un moto in una dimensione, θ = θ(t), poiché l’altra coordinata, r, è costante. E’ detto uniforme se la frequenza angolare dθ(t)/dt=ω(t)=ω0 = costante. ω0 è detta pulsazione
θ = θ(t) = ωo tr = r(t) = ro
In coordinate cartesiane si ha invece:x = x(t) = ro cos(ωo t)y = y(t) = ro sin(ωo t)
Definizioni:
θ(t) = spostamento angolare
ω(t) = dθ(t)/dt = ωo = velocità angolare
ω’(t) = dω(t)/dt = 0 accelerazione angolare
Ma anche, rispetto alla coordinata curvilinea sv(t) = ds/dt = ro dθ/dt = ro ωo = velocità tangenziale
a(t) = d2s/dt2 = ro d2θ/dt2 = 0 = acc. tangenziale
E rispetto alle coordinate cartesiane x(t) e y(t)
vx(t) = dx(t)/dt = ro d(cos(ωo t)/dt = - ro ωo sin(ω0 t) ax(t) = dvx(t)/dt = - ro ωo2 cos(ω0 t)
vy(t) = dy(t)/dt = ro d(sin(ωo t)/dt = ro ωo cos(ωo t) ay(t) = dvy(t)/dt = - ro ωo2 sin(ω0 t)
x
y
r
θ
P(t)v(t)
ac(t)s
accelerazione centripeta
Nota: l’accelerazione a = ac = ax i + ay j è diretta verso il centro ed è detta centripeta
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 18
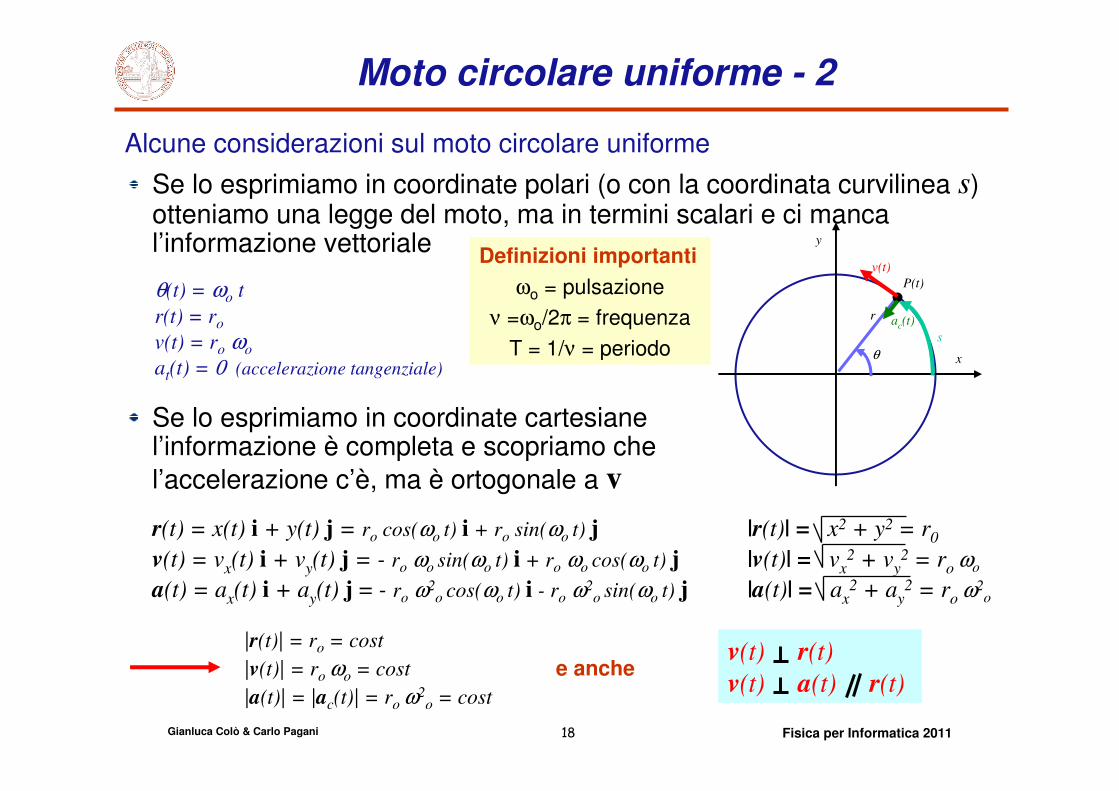
Alcune considerazioni sul moto circolare uniforme
Se lo esprimiamo in coordinate polari (o con la coordinata curvilinea s) otteniamo una legge del moto, ma in termini scalari e ci manca l’informazione vettoriale
θ(t) = ωo t
r(t) = ro
v(t) = ro ωo
at(t) = 0 (accelerazione tangenziale)
Se lo esprimiamo in coordinate cartesiane l’informazione è completa e scopriamo che
l’accelerazione c’è, ma è ortogonale a v
r(t) = x(t) i + y(t) j = ro cos(ωo t) i + ro sin(ωo t) j |r(t)| = x2 + y2 = r0
v(t) = vx(t) i + vy(t) j = - ro ωo sin(ωo t) i + ro ωo cos(ωo t) j |v(t)| = vx2 + vy
2 = ro ωo
a(t) = ax(t) i + ay(t) j = - ro ω2o cos(ωo t) i - ro ω2
o sin(ωo t) j |a(t)| = ax2 + ay
2 = ro ω2o
|r(t)| = ro = cost
|v(t)| = ro ωo = cost e anche
|a(t)| = |ac(t)| = ro ω2
o = cost
Moto circolare uniforme - 2
x
y
r
θ
P(t)
v(t)
ac(t)
s
v(t) r(t)
v(t) a(t) r(t)
Definizioni importanti
ωo = pulsazione
ν =ωo/2π = frequenza
T = 1/ν = periodo
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 19
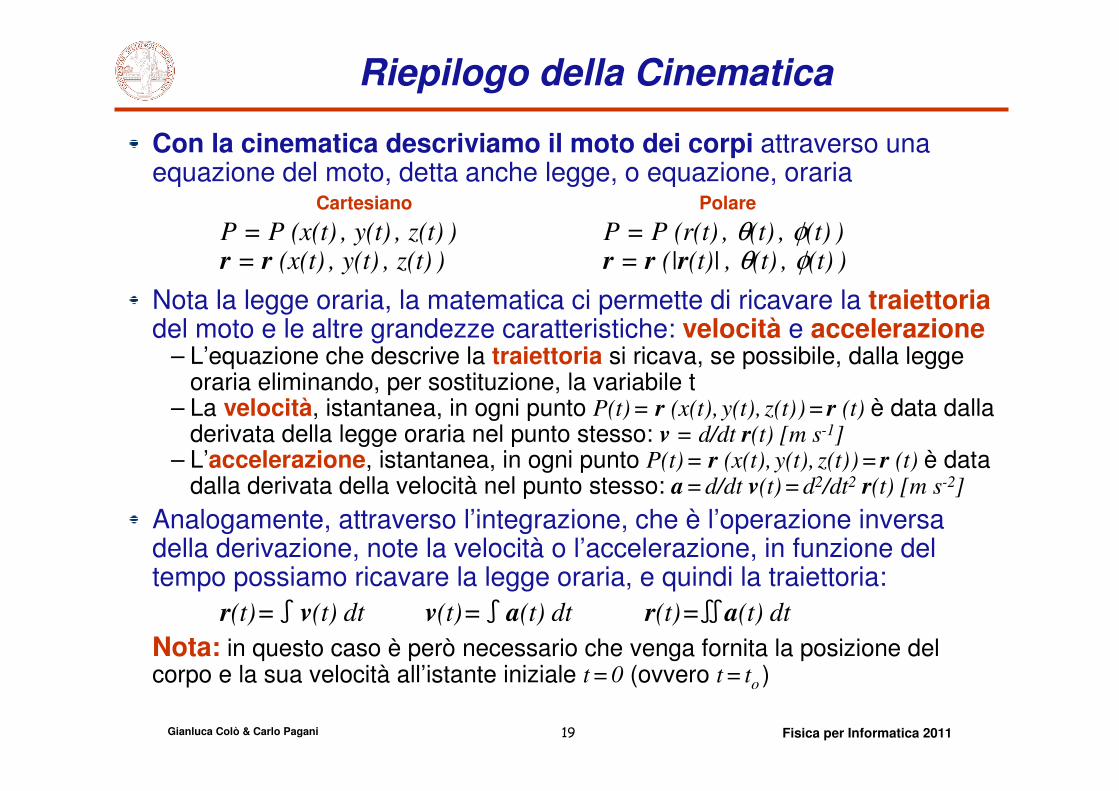
Riepilogo della Cinematica
Con la cinematica descriviamo il moto dei corpi attraverso una equazione del moto, detta anche legge, o equazione, oraria
Cartesiano Polare
P = P (x(t) , y(t) , z(t) ) P = P (r(t) , θ(t) , φ(t) ) r = r (x(t) , y(t) , z(t) ) r = r (|r(t)| , θ(t) , φ(t) )
Nota la legge oraria, la matematica ci permette di ricavare la traiettoria del moto e le altre grandezze caratteristiche: velocità e accelerazione
– L’equazione che descrive la traiettoria si ricava, se possibile, dalla legge oraria eliminando, per sostituzione, la variabile t
– La velocità, istantanea, in ogni punto P(t)= r (x(t), y(t), z(t))=r (t) è data dalla derivata della legge oraria nel punto stesso: v = d/dt r(t) [m s-1]
– L’accelerazione, istantanea, in ogni punto P(t)= r (x(t), y(t), z(t))=r (t) è data dalla derivata della velocità nel punto stesso: a=d/dt v(t)=d2/dt2 r(t) [m s-2]
Analogamente, attraverso l’integrazione, che è l’operazione inversa della derivazione, note la velocità o l’accelerazione, in funzione del tempo possiamo ricavare la legge oraria, e quindi la traiettoria:
r(t)=∫v(t) dt v(t)=∫a(t) dt r(t)=∬a(t) dt
Nota: in questo caso è però necessario che venga fornita la posizione del corpo e la sua velocità all’istante iniziale t=0 (ovvero t=to )
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 20
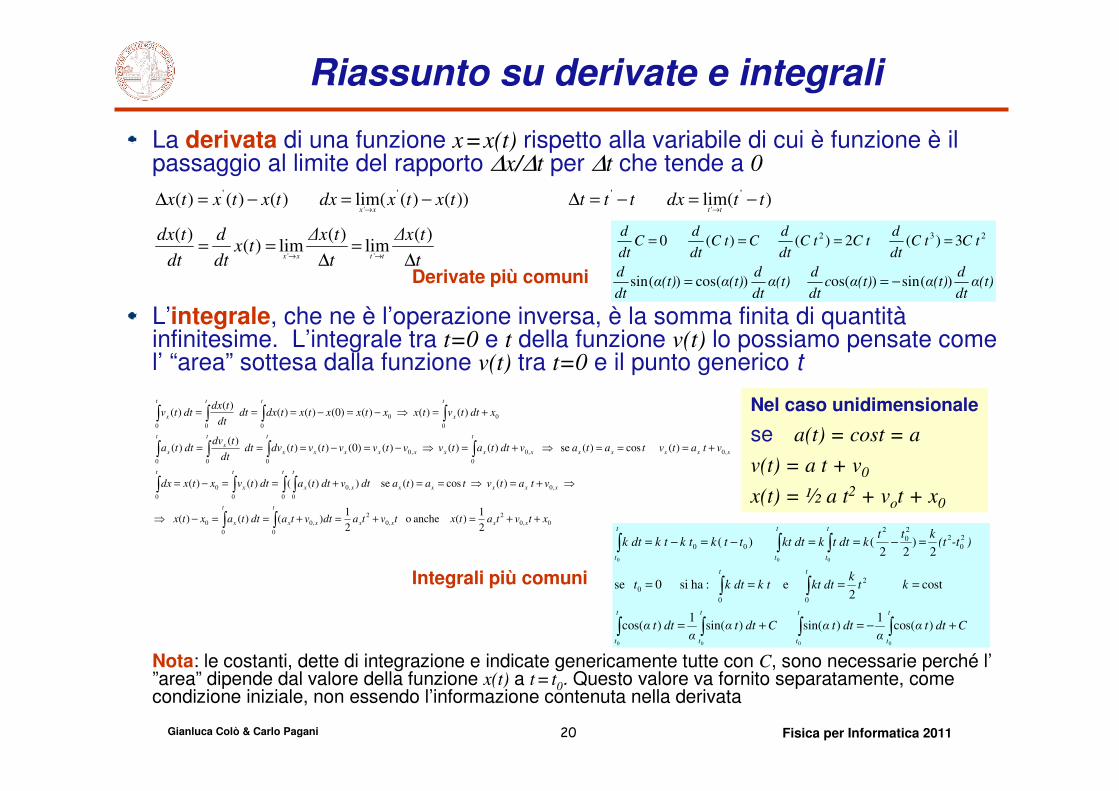
Riassunto su derivate e integrali
La derivata di una funzione x=x(t) rispetto alla variabile di cui è funzione è il passaggio al limite del rapporto ∆x/∆t per ∆t che tende a 0
Derivate più comuni
L’integrale, che ne è l’operazione inversa, è la somma finita di quantità infinitesime. L’integrale tra t=0 e t della funzione v(t) lo possiamo pensate come l’ “area” sottesa dalla funzione v(t) tra t=0 e il punto generico t
Integrali più comuni
Nota: le costanti, dette di integrazione e indicate genericamente tutte con C, sono necessarie perché l’ ”area” dipende dal valore della funzione x(t) a t=t0. Questo valore va fornito separatamente, come condizione iniziale, non essendo l’informazione contenuta nella derivata
)(
lim )(
lim )( )(
)(lim ))()((lim )()()(
''
''
''''
t
t∆x
t
t∆xtx
dt
d
dt
tdx
ttdxttttxtxdxtxtxtx
ttxx
ttxx
∆=
∆==
−=−=∆−=−=∆
→→
→→
α(t)dt
dα(t)α(t)c
dt
dα(t)
dt
dα(t)α(t)
dt
d
tCtCdt
dtCtC
dt
dCtC
dt
dC
dt
d
)(sin)os( )(cos)(sin
3 ) ( 2 ) ( ) ( 0 232
−==
====
0,0
2
,0
2
0
,0
0
0
,0
0 0 0
,0
0
0
,0,0
0
,0
000
0
0
0
000
2
1)( anche o
2
1)( )()(
)( cos)( se ) )(( )()(
)( cos)( se )()( )()0()( )( )(
)(
)()( )()0()( )( )(
)(
xtvtatxtvtadtvtadttaxtx
vtatvtatadtvdttadttvxtxdx
vtatvtatavdttatvvtvvtvtdvdtdt
tdvdtta
xdttvtxxtxxtxtdxdtdt
tdxdttv
xxxx
t
xx
t
x
xxxxx
t t t
x
t
xx
xxxxxx
t
xxxxxx
t
x
t
x
t
x
t
x
ttt
x
++=+=+==−⇒
⇒+=⇒==+==−=
+===⇒+=⇒−=−===
+=⇒−=−===
∫∫
∫ ∫ ∫ ∫
∫∫∫∫
∫∫∫∫ Nel caso unidimensionale
se a(t) = cost = a
v(t) = a t + v0
x(t) = ½ a t2 + vot + x0
∫∫∫∫
∫∫
∫∫∫
+−=+=
====
=−==−=−=
t
t
t
t
t
t
t
t
tt
t
t
t
t
t
t
Cdttαα
dttαCdttαα
dttα
ktk
dtkttkdtkt
) -t(tktt
kdttkdtktttktktkdtk
0000
000
) cos(1
) sin( ) sin(1
) cos(
cost 2
e :ha si 0 se
2
)2
2
( ) (
2
00
0
2
0
22
0
2
00
Fisica per Informatica 2011Gianluca Colò & Carlo Pagani 21
Obiettivi esercizi Cap. 2 (RHW)
Saper ricavare velocità ed accelerazione, nota la legge
oraria.
Saper svolgere problemi su: moto rettilineo uniforme,
uniformemente accelerato, circolare