a finite-element approach to predict permanent deformation
TRANSCRIPT
A Finite-Element Approach to Predict PermanentDeformation Behaviour of Hot Mix Asphalt Basedon Fundamental Material Tests and AdvancedRheological Models
R. Blab*, K. Kappl*, E. Aigner† and R. Lackner‡
*Institute for Road Construction & Maintenance, Vienna University of Technology, Vienna, Austria†Institute for Mechanics of Materials and Structures, Vienna University of Technology, Vienna, Austria‡Material-Technology Unit, University of Innsbruck, Technikerstraße 13, 6020 Innsbruck, Austria
ABSTRACT: An ongoing research project, undertaken at the Christian Doppler Laboratory for
‘performance-based optimisation of flexible road pavements’, focuses on the evaluation of advanced
rheological models (i.e. Power Law, Huet and Huet–Sayegh) to describe permanent deformation
behaviour of hot mix asphalt (HMA) and their implementation in a finite-element (FE) code. To
accomplish this, an appropriate algorithm was developed for the summation of the different con-
tributions of the stress history to determine the resulting creep strain tensor to simulate real-life
stress/strain situations in flexible road pavements. Furthermore, the mathematical background for
parameter identification from dynamic stiffness tests (four-point bending beam and dynamic tension
compression tests) has been developed and a straightforward programme for data fitting is pre-
sented. For the validation of the implemented constitutive equations derived for the selected rhe-
ological models, a FE simulation of triaxial tests on cylindrical HMA specimens was carried out.
KEY WORDS: advanced non-linear viscoelastic rheological models, finite-element-modelling
Introduction
The calculation of displacements, stresses or strains in
the different layers of flexible pavements (hot mixed
asphalt materials), caused by vehicle loads, is a simple
task when linear elastic material behaviour is consid-
ered. However, in reality surface, base course and
granular layers show a more complex constitutive
behaviour, with nonlinear and time-dependent effects
(viscoelastic and viscoplastic material behaviour).
Decades ago, researchers have found that the defor-
mation of asphalt concrete AC under load is composed
of reversible viscoelastic (VE) and irreversible visco-
plastic (VP) components [e.g. 1–4]. Since then, con-
stitutive equations are constantly under development.
Aside from obeying laws, they must describe the
behaviour of the material accurately under different
loading and temperature conditions.
In the last decade, important achievements in the
development of improved rheological models that
describe the complex behaviour of AC have been
made. For example, Schapery model [5], which
includes a linear VE model with damage and a sepa-
rate VP model, was chosen by the National Cooper-
ative Highway Research Programme (NCHRP 9-19)
research team for modelling AC behaviour [6]. At
increasing straining, the observed stiffness reduction
is modelled through the damage caused by the
material. The formulation was extended to three
dimensional 3D conditions by Uzan and Levenberg
[7]. Studies by Di Benedetto et al. [8] allowed the
formulation of a general 1D linear viscoelastic model
with a continuum spectrum called 2S2P1D, two
springs, two parabolic elements, one dashpot. It has
been shown, that the 2S2P1D model is powerful to
determine the linear viscoelastic behaviour in the
small strain domain of bituminous binders, mastics
and mixes, over a very wide range of frequencies and
temperatures. Recently, this model developed to
simulate the 1D thermo-elasto-viscoplastic behaviour
of bituminous materials was formulated for the 3D
case in the linear range [9]. Another material model
adopted by the Delft University uses the flow surface
proposed by Desai et al. [10] in combination with a
set of constitutive relations developed to facilitate
the description of asphalt concrete response [11].
Such material models could be used in mechanistic
pavement design methodologies, which consider
pavement structural response to predict specific distress
and failure modes. Today, there is a trend to substitute
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 3

pavement analysis based on the Multilayer Elastic
Theory by analysis based on finite-element methods
(FEM). A pre-requisite for the use of the FEM is the
availabilityofmaterialmodels thatontheonehandcan
describe the triaxial behaviour in both the linear and
nonlinear range and offers straightforward algorithms
to solve the constitutive equations in an acceptable
computational time period. While on the other hand
and even more important the used model should
reduce the costly experimental laboratory work needed
for material parameter identification to a minimum.
The objective of this work was to identify such
suitable rheological models, which then were imple-
mented in a finite-element (FE) code to enable the
simulation of real-life stress/strain situations in flex-
ible road pavements. Hereby, an appropriate
algorithm was developed for the summation of the
different contributions of the stress history to deter-
mine the resulting creep strain tensor. The mathe-
matical background for parameter identification
from cyclic stiffness tests according to EN 12697-26
[12] was implemented in work sheets for easy data
fitting. In a last step, the performance of the selected
rheological models was evaluated by FE simulation of
permanent deformations, appearing in triaxial tests
on cylindrical specimens made of the two conven-
tional hot mix asphalt (HMA) base course materials.
Tested Materials
Within the research work various surface course and
base course asphalt materials were tested, whereas in
this paper only two base course materials (AC22 base
50/70 and AC22 bin PmB45/80-65) are presented.
The first one is a conventional base course asphalt
concrete material with a maximum aggregate size of
32 mm and a conventional binder 70/100, the sec-
ond material is an asphalt concrete material with the
same sieve curve but a high modified binder PmB45/
80-65. The aggregate that was used the asphalt mixes
was a limestone called ‘Hollitzer’. The main data of
the mixes can be seen in Table 1 and Figures 1–5. The
grading curves of the AC22 base used for the both AC
types are illustrated in Figure 1.
Figure 2 shows the Cole–Cole representations
(elastic vs. viscous parts of the dynamic modulus E**)
and Figure 3 shows the black diagrams (dynamic
modulus E** vs. phase lag U) for both, the 50/70 and
PmB 45/80-65, binders derived from uniaxial cyclic
stiffness tests on prismatic specimen (DTC-PR;
length l · width w · height h ¼ �60 · 60 · 200
mm3) according to EN 12697-26 [12]. The Cole–Cole
and black diagrams for the asphalt mixtures AC 22
base 50/70 and AC 22 bin PmB45/80-65, are shown in
Figures 4 and 5.
Selected Rheological Models and TheirMathematical Background
Selected rheological models
Rheological models, which relate the applied stress
history to the accumulated viscoelastic strains, take
the viscoelastic material response of asphalt into
account. Over the last decades, a large number of
material models for the description of the viscoelastic
Table 1: Main characteristics of base course materials AC22 base 50/70 and AC22 bin PmB45/80-65
Characteristic Unit EN Standard
AC22 base
50/70
AC22bin
PmB45/80-65
Type of binder – EN 12591 and prEN 14023 50/70 PmB 45/80-65
Penetration 1/10 mm EN 1426 56.3 77.5
Softening point R&B �C EN 1427 50.3 68.2
Bending beam rheometer m-value ()18 �C) – EN 14771 0.325 0.388
Bending beam rheometer S-value ()18 �C) MPa EN 14771 284 110
Dynamic shear rheometer dynamic
shear modulus G* (+46 �C)
MPa EN 14770 23 950 18 258
Dynamic shear rheometer phase lag U (+46 �C) degrees EN 14770 79.6 62.3
Rotational viscosimeter RV (+135 �C) MPa s EN 13302 492.8 1439.9
Binder content mass% – 4.5 4.5
Aggregate density qa (limestone) Mg m)3 EN 1097-6 2.850 2.850
Maximum density asphalt qR Mg m)3 EN 12697-5 2.612 2.612
bulk density asphalt specimen qSSD Mg m)3 EN 12697-6 2.484 2.499
Air void content V vol% EN 12697-6 4.9 4.3
Marshall stability kN EN 12697-34 11.2 13.3
Marshall flow mm EN 12697-34 3.0 3.9
4 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.

behaviour of asphalt were developed, starting with
simple rheological models such as the Maxwell or
Kelvin–Voigt model, which can be represented by
one spring and one linear dashpot [13]. With these
models, it is not possible to fit the experimentally
observed nonlinearity in the creep deformations
properly. Consequently other, more complex rheo-
logical models were developed, consisting of non-
linear (parabolic) dashpots that model the observed
nonlinearity [1, 2, 8]. These models are, i.e. the Power
Law model, represented by a linear spring and a
parabolic dashpot in series, or the Huet model, con-
sisting of a linear spring with two nonlinear dashpots
in series. Table 2 gives an overview about all rheo-
logical models considered in this paper. Whereas the
Huet model is well suited for the description of
monotonic loading of asphalt, it is not really suitable
for predicting the behaviour under cyclic loading. As
a remedy, the Huet–Sayegh model, obtained from
adding a linear spring in parallel to the Huet model,
was employed.
Based on the strain history under constant loading,
three regimes of creep are commonly distinguished:
primary, secondary and tertiary creep. The different
creep regimes are distinguished mathematically by
the time derivative of the creep strain rate, d2e/dt2,
under constant loading, with d2e/dt2 < 0 for primary
creep, d2e/dt2 ¼ 0 for secondary creep and d2e/dt2 > 0
for tertiary creep. Hereby, the shift from primary to
secondary and, finally, from secondary to tertiary
creep is explained by the opening of microcracks and
the formation of plastic failure zones in the material
0
1020
30
4050
60
70
8090
100
0.01 0.1 1 10 100Sieve size (mm)
Pass
ing
% (
m-%
)AC22 base 50/70
Figure 1: Grading curve AC22 base 50/70
0102030405060708090
E* (MPa)
Phi (
°)
Phi (
°)
+46°C+40°C+34°C+28°C+22°C+16°C–20°C
0102030405060708090
0.001 0.01 0.1 1 10 0.001 0.01 0.1 1 10
E* (MPa)
+46°C+40°C+34°C+28°C+22°C+16°C+10°C+4°C–8°C–14°C–20°C
Figure 3: Black diagrams (dynamic modulus E* vs. phase lag U) of conventional binder 50/70 (left side) and modified binder
PmB 45/80-65 (right side)
0
0.5
1
1.5
0 1 2 3 4 5
E1 (MPa)
E2
(MPa
) +46 °C+40 °C+34 °C+28 °C+22 °C+16 °C–20 °C
0
0.5
1
1.5
0 1 2 3 4 5
E1 (MPa)
E2
(MP
a) +46 °C+40 °C+34 °C+28 °C+22 °C+16 °C+10 °C+4 °C–8 °C–14 °C–20 °C
Figure 2: Cole–Cole representations (elastic part E1 and viscous part E2 of dynamic modulus E*) of conventional binder 50/70
(left side) and modified binder PmB 45/80-65 (right side)
0
1000
2000
3000
4000
5000
0 10 000 20 000 30 000 40 000
E1 (MPa)
E2
(MPa
)
E2
(MPa
) –10 °C 0 °C +10 °C +20 °C
0
1000
2000
3000
4000
5000
0 10 000 20 000 30 000 40 000
E1 (MPa)
–10 °C0 °C +10 °C +20 °C
Figure 4: Black diagrams (dynamic modulus E* vs. phase lag U) and Cole–Cole representations (elastic part E1 and viscous part
E2 of dynamic modulus E*) of conventional base course material AC22 base 50/70 (left side) and modified base course material AC22
bin PmB 45/80-65 (right side)
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 5
R. Blab et al. : AFE Approach to Predict Permanent Deformation Behaviour

microstructure leading to the collapse of the mate-
rial. To capture the entire creep response of the
material (from primary creep to material failure),
nonlinear creep laws, relating the applied stress to
the creep strain in a nonlinear manner, were pro-
posed in the open literature, reading e ¼ Jrn with J
denoting the creep compliance and n > 1. For mod-
erate loading situations, which do not cause cracking
and the formation of plastic zones, creep deforma-
tions remain in the primary creep regime and linear
creep laws, characterised by n ¼ 1, can be used to
describe the material response.
In the case of linear creep, any nonlinearity
observed in the creep deformation response is cap-
tured by the compliance function J. This function
was determined for different viscoelastic material
models (see Table 2). Whereas J is obtained by a
simple summation of contributions for models
characterised by a serial arrangement of springs and
dashpots, parallel arrangement results in internal
stress redistribution even in case of constant external
loading. In case of the Kelvin–Voigt model, i.e. the
underlying differential equation describing this
redistribution can be solved analytically, giving an
explicit expression for the creep compliance func-
tion. For the Huet–Sayegh model, on the other hand,
a numerical solution algorithm was developed. An
analytical expression for the Huet–Sayegh compli-
ance function for arbitrary values for h and k does not
exist [14].
Mathematical backgrounds
The following chapter gives a brief overview of the
mathematical backgrounds for the rheological mod-
els presented here (Power Law model, Huet model
and Huet–Sayegh model).
Power Law modelThe Power Law model is an extension of Maxwell’s
very basic model. It consists of a linear elastic spring
and a parabolic (nonlinear) dashpot connected in
series. Because of this serial connection, the static
creep compliance J(t) used to describe tests with static
loading can be obtained by adding up the creep
compliances Ji(t) of the two elements (spring and
dashpot):
JPLðtÞ ¼ JSP þ JPDPðtÞ ¼ 1
E1þ Ja
t
s
� �k
(1)
Hereby, JSP (1/MPa) stands for the creep compli-
ance of the spring and JPDP (1/MPa) for the creep
compliance of the parabolic dashpot. E¥ (MPa) is the
stiffness of the spring, Ja the creep compliance at t ¼s, where s (s) is the characteristic time of the under-
lying viscous process. k represents a dimensionless
parameter influencing the behaviour of the dashpot
with time.
To obtain the dynamic compliance out of this
Equation (1), the following relationship is needed:
Table 2: Creep compliance functions J
(MPa)1) for different rheological modelsRheological model Creep function J(t) Parameters
Power-Law-Model E Ja , k , 1
( )k
a
tJ t J
EE , Ja, k,
Huet modelE Ja , k , Jb , h , 1
( )k h
a b
t tJ t J J
EE , Ja, Jb, k, h,
Huet-Sayegh modelE Ja , k , Jb , h ,
E0
numerically solved E0, E , Ja, Jb, k, h,
0102030405060708090
100 1000 10 000 100 000
E* (MPa)
Phi (
°) –10 °C0 °C+10 °C+20 °C
0102030405060708090
100 1000 10 000 100 000
E* (MPa)
Phi (
°) –10°C0°C+10°C+20°C
Figure 5: Black diagrams (dynamic modulus E* vs. phase lag U) of conventional base course material AC22 base 50/70 (left side)
and modified base course material AC22 bin PmB 45/80-65 (right side)
6 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.

J�ðxÞ¼ ixZ 1
0
Jðn0Þe�ixn0 dn0 ¼ ðixÞL½Jðn0Þ�s¼ix¼ðixÞJðixÞ
(2)
This equation states that the dynamic compliance
J�(x) can be received by multiplying the Laplace-
transformed1 L[J(n¢)]s¼ix with (ix), where ‘i’ represents
the complex number and x is the frequency of the
oscillating load. For the presented Power Law model,
the result of the equation stated above is
J�PLðxÞ ¼1
E1þ Jas
�kCðkþ 1ÞðixÞ�k(3)
J�(x) is a complex number, C(x) describes the gamma
function. By taking the rules for operations with
complex numbers into account and noting that
i)k ¼ cos (kp/2)) isin (kp/2), the absolute value of
the real (J1) and the complex (J2) part of the dynamic
compliance are
J1;PL ¼1
E1þ Jas
�kCðkþ 1Þ coskp2
� �x�k (4)
J2;PL ¼ Jas�kCðkþ 1Þ sin kp
2
� �x�k (5)
By using these two characteristics, the norm of the
complex compliance and the phase angle (also called
loss angle) d can be obtained as shown in the fol-
lowing equations
dPL ¼ arctanJ2;PL
J1;PL
� �
¼ arctanJa sin kp
2
� �Cðkþ 1Þs�kE1x�k
1þ Ja cos kp2
� �Cðkþ 1Þs�kE1x�k
!(7)
Noting that the complex compliance J� and the
complex modulus E� as well as their norms are
reciprocal, E� and |E�| can easily be derived from
Equations (3) and (6). Additionally taking into
account that
E1 ¼1
jJ�j cos d ¼ J1
ðJ1Þ2 þ ðJ2Þ2(8)
E2 ¼1
jJ�j sin d ¼ J2
ðJ1Þ2 þ ðJ2Þ2(9)
the loss (E2) and storage modulus (E1) for the Power
Law model can be calculated as follows [13]
E1;PL ¼1
E1þ Jas�kCð1þ kÞ cos kp
2
� �x�k
1E1þ Jas�kCð1þ kÞ cos kp
2
� �x�k
� �2
þJ2a s�2kCð1þ kÞ2 sin kp
2
� �x�2k
(10)
E2;PL ¼Jas�kCðkþ 1Þ sin kp
2
� �x�k
1E1þ Jas�kCð1þ kÞ cos kp
2
� �x�k
� �2
þJ2a s�2kCð1þ kÞ2 sin kp
2
� �x�2k
(11)
Huet modelBy adding another parabolic dashpot to the Power
Law model in series, Huet model could be received.
Again the presented rheological model describes a
serial model and so the complex compliance can be
obtained by adding the dynamic compliance of a
second parabolic dashpot to (3):
J�HUðxÞ¼1
E1þ Jas
�kCðkþ1ÞðixÞ�kþ Jbs�hCðhþ1ÞðixÞ�h
(12)
with Jb and h as parameters of the second dashpot.
The real and imaginary part of Equation (12) show
the loss and storage compliances of Huet model.
J1;H ¼1
E1þ Jas
�kCð1þ kÞ coskp2
� �x�k
þ Jbs�hCð1þ hÞ cos
hp2
� �x�h (13)
J2;H ¼ Jas�kCð1þ kÞ sin kp
2
� �x�k
þ Jbs�hCð1þ hÞ sin hp
2
� �x�h (14)
The reciprocal value of Equation (12) is the
dynamic modulus, E1 and E2 can be obtained from
J1/([J1]2 + [J2]2) and J2/([J1]2 + [J2]2):
jJ�PLj ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðJPL
1 Þ2 þ ðJPL
2 Þ2
q¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiJ2a s�2kCðkþ 1Þ2ðE1Þ2x�2k þ 2Jas�kCðkþ 1ÞE1 cos kp
2
� �x�k þ 1
qE1
(6)
1The Laplace transformation is defined as f ðsÞ ¼R1
0 f ðtÞe�st dt
with its inverse transformation reading f ðtÞ ¼R1
0 f ðsÞest ds.
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 7
R. Blab et al. : AFE Approach to Predict Permanent Deformation Behaviour

E1;H ¼
1E1þ Jas�kCð1þ kÞ cos kp
2
� �x�k
þJbs�hCð1þ hÞ cos hp2
� �x�h
DEN(15)
E2;H ¼Jas�kCð1þkÞsin kp
2
� �x�kþ Jbs�hCð1þhÞsin hp
2
� �x�h
DEN(16)
whereas the denominator DEN is
DEN ¼ 1
E1þ Jas
�kCð1þ kÞ coskp2
� �x�k
�
þJbs�hCð1þ hÞ cos
hp2
� �x�h
�2
þ Jas�kCð1þ kÞ sin kp
2
� �x�k
�
þJbs�hCð1þ hÞ sin hp
2
� �x�h
�2
(17)
The phase angle d could be calculated from
E2,H/E1,H and J2,H/J1,H respectively [13].
Huet–Sayegh modelKeeping Huet branch and adding another branch
with a linear elastic spring in parallel, the so-obtained
system is called Huet–Sayegh model. As the present
model is connected in parallel, the complex modulus
of the two parallel branches can be combined to the
modulus of the model.
E�HSðxÞ ¼ E�SP þ E�H ¼ E0 þ1
ðJ1;HÞ � iðJ2;HÞ(18)
From the equation above, the loss (E2) and stor-
age modulus (E1) can be received by taking the
rules for operating with complex numbers into
consideration.
E1;HS ¼ E0 þJ1;H
ðJ1;HÞ2 þ ðJ2;HÞ2(19)
E2;HS ¼J2;H
ðJ1;HÞ2 þ ðJ2;HÞ2(20)
The norm of the complex modulus can now be
derived:
jE�HSj ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE2
0J21;H þ E2
0J22;H þ 2E0J2;H þ 1
J21;H þ J2
2;H
vuut (21)
The reciprocal value of Equation (18) is J� shown in
the equation stated below.
J�HSðxÞ ¼1
E0 þ 1J1;H�iJ2;H
¼E0J2
1;H þ J1;H þ J22;HE0 � iJ2;H
E20J2
1;H þ E20J2
2;H þ 2E0J1;H þ 1
(22)
Again from the equation above the real J1 and
imaginary part J2 are received.
J1;HS ¼E0J2
1;H þ J1;H þ J22;HE0
E20J2
1;H þ E20J2
2;H þ 2E0J1;H þ 1(23)
J2;HS ¼J2;H
E20J2
1;H þ E20J2
2;H þ 2E0J1;H þ 1(24)
and finally the absolute value of J� can be obtained as
the reciprocal value of |E�|.
jJ�HSj ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiJ21;H þ J2
2;H
E20J2
1;H þ E20J2
2;H þ 2E0J1;H þ 1
vuut (25)
By dividing E2,HS/E1,HS or J2,HS/J1,HS the phase angle
/ can be obtained [13].
Implementation of advanced rheological modelsin finite-element code ‘FEAP’
So far, only the uniaxial situation was described and
the creep compliance function was given for a set of
viscoelastic models depicted in Table 2. In pavement
structures, however, the lateral confinement of
asphalt induces three-dimensional stress states. For
the extension of the one-dimensional viscoelastic
models to three dimensions, the (fourth-order)
normalised compliance matrix G, with
G ¼ EC�1 ¼
1 �t �t 0 0 0�t 1 �t 0 0 0�t �t 1 0 0 00 0 0 1þ t 0 00 0 0 0 1þ t 00 0 0 0 0 1þ t
(26)
where m is the Poisson ratio, is introduced. Accord-
ingly, the creep strain tensor in consequence of three-
dimensional loading, represented by the stress tensor
r, is given by e ¼ JG:r [14]. In contrast to the intro-
duction of the normalised compliance tensor G,
which assumes a similar Poisson effect for both elas-
tic and viscous deformations, advanced creep models
take the different material response when subjected
to deviatoric or hydrostatic loading into account. The
creep response in consequence of hydrostatic loading
is associated with the compaction of the material
by closing existing air voids. In case of no air voids
8 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.

(e.g. when considering bitumen or mastic only), no
volumetric creep is observed. As regards the creep
response under deviatoric stress states, no air voids
are required. The deformation results from sliding
effects within the material. In general, the deviatoric
creep response is significantly larger than the creep
deformations associated with hydrostatic loading.
Moreover, the latter is bounded by the air voids
present in the material, while ‘deviatoric’ creep
evolves over longer time scales. To account for
the different material response when subjected
to hydrostatic and deviatoric loading, two creep
compliance functions, one associated with hydro-
static and one associated with deviatoric loading,
may be introduced. Accordingly, the viscoelastic
strain tensor is composed of two contributions,
reading
e ¼ evol þ edev ¼ ½JvolIvol þ JdevIdev� : r; (27)
where Jvol and Jdev are creep compliance functions
describing volumetric and deviatoric creep deforma-
tions associated with hydrostatic and deviatoric stress
states respectively. In the above given equation for
the viscoelastic strain tensor, Ivol and Idev are defined
as [14]
Ivol ¼
1=3 1=3 1=3 0 0 0
1=3 1=3 1=3 0 0 0
1=3 1=3 1=3 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
and
Idev ¼
2=3 �1=3 �1=3 0 0 0
�1=3 2=3 �1=3 0 0 0
�1=3 �1=3 2=3 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
(28)
In general, Jvol and Jdev correspond to different
viscoelastic models. As creep under hydrostatic
loading is associated with the closure of air voids in
the material, asymptotic model such as the Kelvin–
Voigt model are well suited to describe volumetric
creep. Under deviatoric loading, on the other hand,
any one of the viscoelastic models shown in Table 2
may be employed [14]. The use of linear creep laws
when focusing exclusively on primary creep defor-
mations allows summation of the different
contributions to the stress history to determine the
resulting creep strain tensor. Mathematically, this
summation is performed by a so-called convolution
integral, reading the creep strain tensor for the time
instant t as
eðtÞ ¼Zt
0
1
3Jvolðt � sÞIvol þ 1
2Jdevðt � sÞIdev
�:drds
ds
(29)
where s represents the time instant of loading. FE
analyses, however, are performed in an incremental
manner by dividing the simulation time into time
increments. Thus, the stress rate dr/ds appearing in
the above equation is replaced by Dr/Dt, where Dr
represents the incremental change in the stress
tensor, which, in the course of time integration, is
assumed to be applied at the beginning of the
respective time increment. Accordingly, the convo-
lution integral becomes a sum over the time incre-
ments computed so far. For the case of the n + 1 time
increment within tn £ t £ tn+1, this sum reads:
eðtnþ1Þ ¼Xnþ1
m¼1
hJvolðtnþ1 � tm�1Þ
Ivol
3
þ Jdevðtnþ1 � tm�1ÞIdev
2
i� DrðtmÞ (30)
By splitting the sum into the sum from m ¼ 1 to n
and the contribution corresponding to the n + 1 time
increment, one gets the stress tensor at the end of the
n + 1 time increment as
rðtnþ1Þ ¼ Jnþ1
"eðtnþ1Þ �
Xn
m¼1
hJvolðtnþ1 � tm�1Þ
Ivol
3
þ Jdevðtnþ1 � tm�1ÞIdev
2
i� DrðtmÞ
#(31)
with
Jnþ1 ¼ Jvolðtnþ1 � tnÞIvol
3þ Jdevðtnþ1 � tnÞ
Idev
2(32)
Whereas the stress tensor is required for the com-
putation of the internal force vector of FE programs,
the so-called ‘consistent tangent’, i.e. the derivation
of the stress–strain law with respect to the strain
tensor is required for the integration of the element
stiffness and, finally, of the global stiffness matrix. For
the outlined stress–strain law, considering volumetric
and deviatoric creep, the consistent tangent becomes
drn+1/den+1 ¼ Jn+1. The viscoelastic framework outline
above was implemented into the FE programme
FEAP, which provides two user subroutines for con-
sideration of user-defined rheological material mod-
els for FE simulations [for more details see Ref. 14].
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 9
R. Blab et al. : AFE Approach to Predict Permanent Deformation Behaviour

Determination of Material Data andData Fitting
Direct tension and compression stiffness tests
The basis for fitting the various parameters for the
different rheological models are complex modulus
values obtained from dynamic stiffness tests
according to European Standard EN 12697-26
[12]. In this research project, four-point bending
beam tests (4PB-PR) on prismatic specimens
(l · w · h � 500 · 50 · 50 mm3) and direct tension
and compression tests (DTC-CY) on cylindrical
specimen (Ø � 50 mm, h � 200 mm) as well as
on prismatic specimen (DTC-PR; l · w · h ¼�60 · 60 · 200 mm3), both with cyclic sinusoidal
loading were conducted. In this paper, only DTC-
PR test data were used for data fitting and FE sim-
ulation.
In the DTC-PR, a sinusoidal strain e ¼ e0 sin (xt) is
applied on a cylindrical sample glued to two steel
plates screwed to the loading rig. e0 is 25 · 10)6
microstrains (�0.005 mm for a 200-mm-long speci-
men) to avoid specimen damaging. The test tem-
peratures were )10, 0, 10, 20 �C, the frequencies
changed from 0.1 up to 40 Hz (0.1, 1, 2, 5, 10, 15,
20, 30 and 40 Hz). With the measured axial force F,
the axial deformation z and phase angle d the
complex modulus E* could be calculated at different
temperatures and frequencies with the following
equations
E1 ¼h
b1b2
F
zcosðdÞ þ
M2 þm� �
103x2
� �(33)
E2 ¼h
b1b2
F
zsinðdÞ
� �(34)
E� ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE2
1 þ E22
q(35)
U ¼ arctanE2
E1
� �(36)
where E1 is the real component (MPa), E2 the imagi-
nary component of the complex modulus E* (MPa), F
the measured axial force (N), z the measured axial
deformation (mm), d the measured phase lag (de-
grees), h the specimen height (mm), b1 the width of
specimen (mm), b2 the depth of specimen (mm), M
the mass of specimen (kg), m the mass of movable
test machine parts (kg) and U the calculated material
phase lag without system influences (degrees).
Data fitting procedure
Starting with the measured data (force F, displacement
z and phase angle d) from the DTC-PR stiffness tests at
different temperatures (T ¼ )10, 0, +10, +20 �C) and
frequencies, the storage and loss modulus can be
computed by taking shape and mass factors for the
underlying stiffness test into account. The Cole–Cole
and black diagrams are obtained by plotting E2 against
E1 and U against |E�| respectively – see Figures 3 and 4.
The analytical curve of the selected model can now be
approximated to the data from the tests, if the model’s
parameters – e.g. E0, E¥, Ja, Jb, k and h for Huet–Sayegh
model – by means of curve fitting facilitating the mean
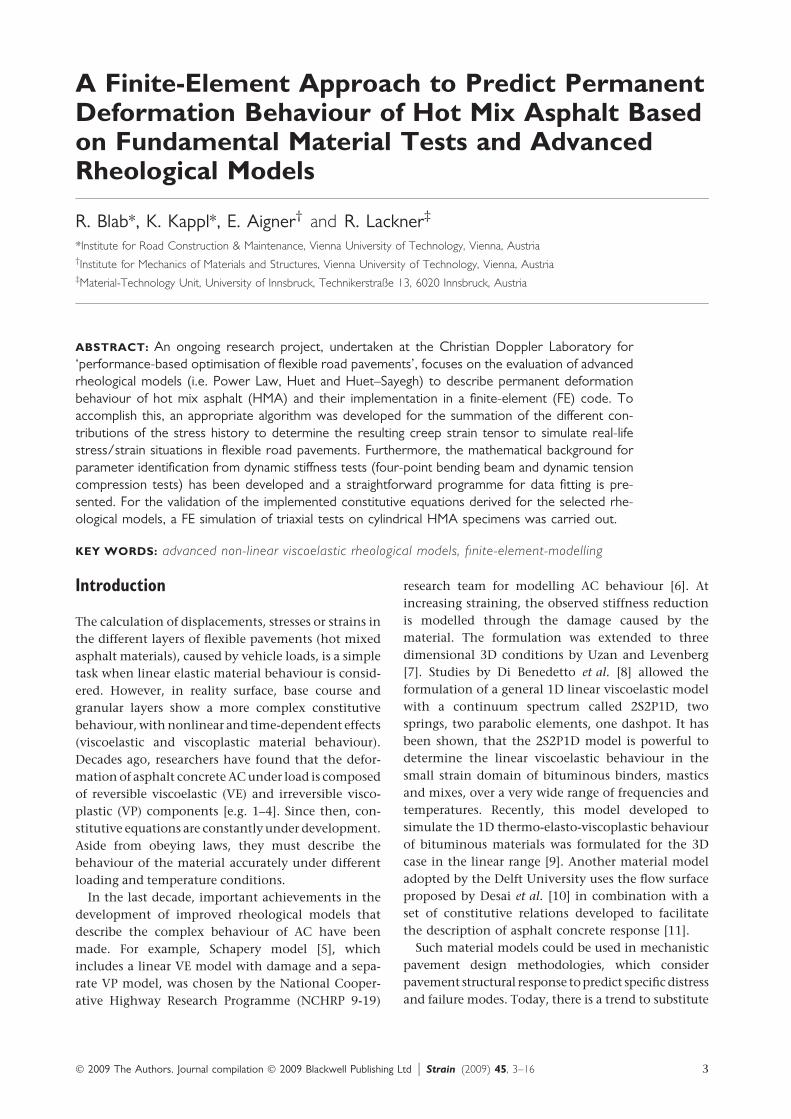
square error method. Figure 6 shows all model fits for
the AC22 bin PmB 45/80-65 material in the Cole–Cole
and black representation and Table 3 summarises all
model parameters for both materials. In this case, the
quality of the fitting, i.e. how well the analytical curve
fits to test data, is increased by minimising the square
error between data and curve in y direction. Hereby,
an analytical characterisation of the materials’
mechanical behaviour is achievable and so obtained
parameters can be used for, e.g. computer-based FE
simulation.
Figure 6 shows, that Huet–Sayegh model results in
the best fit quality, represented by the smallest error
deviation. It is important to note, that the complex
modulus E0 from Huet–Sayegh model has important
influence on the results of FE simulations. Especially,
the phase lag U, shown in the black representations,
decreases enormously with changing E0 values (see
last row, right diagram in Figure 6). The characteristic
creep time s is fitted by using the Arrhenius law
according to Equation (31):
s ¼ 1
s0exp �Ea
R
1
T� 1
T0
� � �(37)
Sensitivity test of models’ parameters anderror analysis
After fitting the test data of any material, tested in
the stiffness tests according to EN 12797-26, it
becomes apparent that an optimum of rheological
model parameters (e.g. E0, E¥, Ja, Jb, k and h) are
existing, for which the sum of the mean square value
is a minimum. Not every rheological parameter has
the same influence on the quality of the data fit. To
find out which parameter has the largest influence
on the behaviour of the model’s analytical curve,
each model parameter was varied by ±1% of the
optimum values by keeping an eye on the behaviour
of the error’s change. Figures 7 and 8 show the
10 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.
proportional change in the error if the rheological
parameters of the Power Law and Huet–Sayegh
model are varied.
Analysing the Power Law model, the influence of
a +1% or )1% change in model parameters was not
really significant. The parameter with the largest
influence on the quality of the data fitting is E¥.
Parameter k’s impact on the data fitting is in both
cases smaller than 0.5%, the creep parameter Jadoes not influence the curve fit at all. Overall, this
model seems not very sensitive towards small
changes in model parameters. One reason might be
that the Power Law model itself is not able to fit
test data satisfyingly over a wide range of temper-
atures and frequencies. Therefore, the sum of mean
square value at the best fit is about 10 times higher
than for any other model used in this paper and
thus changes in parameters do not influence the
relative error as much as for example Huet–Sayegh
model.
The second model, on which a sensitivity analy-
sis was conducted, is the Huet–Sayegh model. On
the right sides of Figures 7 and 8 the relative
changes of the mean square values are shown, if
the original rheological model parameters are
varied about ±1%. In that case, it can clearly be
seen (right diagrams in Figures 7 and 8), that two
parameters (the glassy modulus E¥ and the first
Table 3: Overview of fitted rheological model parameters for Power Law, Huet and Huet–Sayegh model for both materials (AC 22
base 50/70 and AC 22 bin PmB 45/80-65)
Rheological model E0 (MPa) E¥ (MPa) Ja (MPa)1) k (–) Jb (MPa)1) h (–) s at +40 �C (–)
AC 22 base 50/70
Power Law model – 32 273 0.01* 0.368 – – –*
Huet model – 36 072 0.000676 0.222 0.018 0.633 5.54837E)01
Huet–Sayegh model 7 36 065 0.000685 0.223 0.018 0.635 5.54837E)01
AC 22 bin PmB 45/80-65
Power Law model – 31 372 0.0041* 0.361 – – –*
Huet model – 38 173 0.000590 0.198 0.0182 0.566 3.12321E)01
Huet–Sayegh model 5 37 649 0.000584 0.202 0.0179 0.594 3.12321E)01
*s could not be fitted out from Cole–Cole diagrams obtained from dynamic stiffness tests. s was determined from static creep tests. Values in asterisk-marked cells are
(Ja/t)k values, i.e. (Ja/t)k ¼ 0.01 for AC 22 base 50/70.
0
1000
2000
3000
4000
5000
0 5000 10 000 15 000 20 000 25 000 30 000 35 000
–10 °C 0 °C +10 °C +20 °C PL-Model
E2
(M
Pa)
E1 (MPa) 0
10 20 30 40 50 60 70 80 90
1 10 100 1000 10 000 100 000
–10°C0° C +1 0° C +2 0° C PL-Model
Phi
(°)
E* (MPa)
0
1000
2000
3000
4000
5000
0 10 000 20 000 30 000 40 000
–10.3 –0.4 10.4 20.3 Huet-Model E
2 (
MPa
)
E1 (MPa) 0
10 20 30 40 50 60 70 80 90
1 10 100 1000 10 000 100 000
–10°C 0°C +10°C +20°C Huet-Model
Phi
(°)
E* (MPa)
0
1000
2000
3000
4000
5000
0 10 000 20 000 30 000 40 000
–10.3 –0.4 10.4 20.3 HS-Model E
2 (
MP
a)
E1 (MPa) 0
10 20 30 40 50 60 70 80 90
1 10 100 1000 10 000 100 000
–10°C 0°C +10°C +20°C HS-Model
Phi (
°)
E* (MPa)
Figure 6: Graphical illustration of AC22 bin PmB45/80-65 materials’ fitted model parameters (rheological model curve ¼ solid
black lines in all diagrams) in Cole–Cole (left side) and black representation (right side) for the Power Law model, Huet model and
Huet–Sayegh model (from top to bottom)
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 11
R. Blab et al. : AFE Approach to Predict Permanent Deformation Behaviour

dashpot’s exponent k) have a mentionable influ-
ence on the quality of the data fits. E¥ can be
described as the glassy modulus and is important
for the material’s behaviour at low temperatures
and high frequencies. The exponent k physically
specifies the velocity of the viscous model parts at
which deformations increase from the point of the
glassy modulus E¥ (where the viscous modulus
values are zero) if temperatures increase or
frequencies decrease. Increasing values for k mean
increasing permanent deformations if temperature
gets higher and/or frequency gets lower. All other
model parameters have less influence on the mean
square value’s change, as can be seen in Figure 7
and Figure 8. Consequently, the fitting of E¥ and k
have to be carried out most carefully.
Model Validation by Finite-ElementSimulations
Numerical study of triaxial cyclic compressiontests (TCCT) with FE simulation
For validation of the constitutive material presenta-
tions implemented in the FE code the rheological
models are used to simulate the behaviour of asphalt
in triaxial cyclic compression tests (TCCT) on cylin-
drical specimens, according to European Standard EN
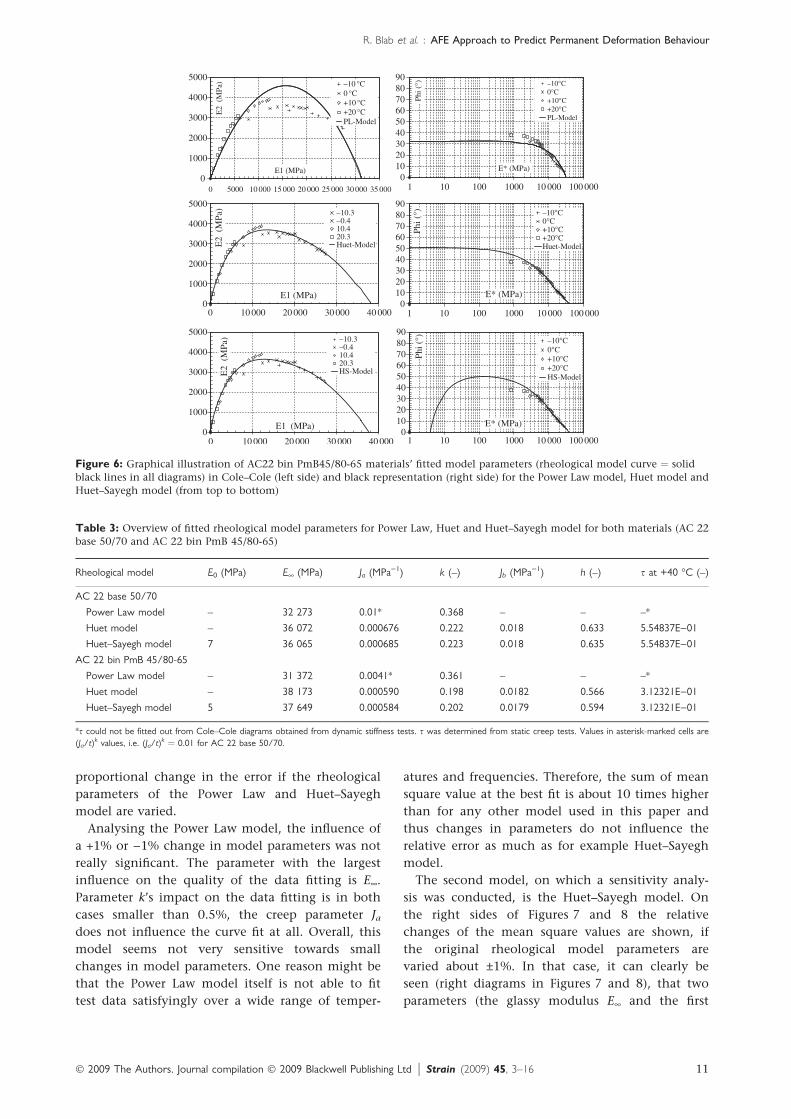
12697-25 [15]. Exploiting the axisymmetry of the
problem, a two-dimensional axisymmetric model
was chosen. Moreover, the symmetry with respect to
the horizontal centreline was taken into account
reducing the FE model to one-quarter of the cylin-
drical specimen (outlined in Figure 9).
The geometric dimensions of the triaxial test set-up
are shown in Figure 10. In addition to the asphalt
specimen, the loading platen was considered in the
FE analysis. The cyclic, dynamic axial force was
applied onto this loading platen.
As observed during the experimental laboratory
work, the asphalt specimen experienced non-uni-
form deformations, characterised by increasing radial
deformation with increasing distance from the load-
ing platen. This effect, more pronounced in case of
higher testing temperature and large testing time, is
explained by the lateral confinement at the loading
platen. Accordingly, a contact formulation consider-
ing friction between the asphalt specimen and the
loading platen was considered in the numerical
analyses (friction according to Coulomb’s law with
l¼ 0.8). According to the numerical results presented
in this paper, uniform strain and stress distributions
were obtained in the main part of the specimen for
height/diameter ratios equal to and higher than 200/
100 (shown in Figure 10; axial displacements
homogenous; radial displacements influenced by
friction effects between loading platen and speci-
men). Laboratory tests of the two materials (AC 22
base 50/70 and AC 22 bin PmB 45/80-65) described in
chapter 2 were re-analysed. The chosen experiments
2.8 %
–4.0 %
0.0 %
–0.3 %0.0 %
0.2 %
–10–8–6–4–202468
10
original+1% original–1%
E Ja k
5.3 %
75.8 %
9.5 %0.0 %
–3.2 %
–50.5 %
–7.4 %–18.9 % –26.3 %
87.4 %
6.3 %
0.0 %
–100–80–60–40–20
0
20406080
100
original+1% original–1%
E0 E Ja k Jb h
Figure 7: Graphical illustration of relative error’s proportional change for variation of Power Law parameters (left side) and Huet–
Sayegh parameters (right side) ±1% of the optimum of material AC22 base 50/70
2.3 %
–3.0 %
0.0 %
–0.4 %
0.4 %
0.0 %
–10–8–6–4–202468
10
Original+1% Original–1%
E Ja k
4.4 %10.7 %
5.0 %9.9 %
–0.3 %
–13.5 % –11.0 %
–27.3 %
–4.1 %
12.7 %6.3 %
–5.0 %
–50–40–30–20–10
01020304050
Original+1% Original–1%
E0 E J ka Jb h
Figure 8: Graphical illustration of relative error’s proportional change for variation of Power Law parameters (left side) and Huet–
Sayegh parameters (right side) ±1% of the optimum of AC22 bin PmB 45/80-65
12 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.
were characterised by a cyclic axial compressive
loading (sinusoidal axial load at 3 Hz and ±200 kPa)
with a constant confining pressure of 50 kPa at
+40 �C (specification according to European Standard
EN 12697-25 [15]). The FE computations were per-
formed on the basis of the rheological material
parameters extracted from the Cole–Cole and black
diagrams, shown in Table 3. The strain histories
obtained from these FE calculations with different
rheological models are illustrated in Figure 11.
Comparison of different rheological models
The results of the FE simulation, illustrated in
Figure 11, show quite good correlations with the test
results obtained from TCCT for the Power Law and
Huet–Sayegh model. With both models it was possi-
ble to predict TCCT axial strains within a range +60%
and )30% for the AC 22 base 50/70 material at
+40 �C and within +46% and )21% for the AC 22 bin
PmB45/80-64 material. On the one hand, predicted
axial strains, calculated with the Power Law model,
overestimated experimentally observed axial strains
by a factor of �2/3 for the conventional binder
material and on the other hand they underestimated
them by a factor of �1/5. Similar behaviour could be
found with the Huet–Sayegh model. Here axial
strains obtained by testing were underestimated
(factor of �1/3) for the conventional binder material,
whereas modified binder materials’ axial strains were
overestimated (factor of �1/2).
Re-analysed axial strains, conducted with Huet
model parameters (see Table 3), did not produce
correlating results. For both materials predicted axial
strains were much too high; maximum differences
were about +450% (AC 22 base 50/70) and +435%
(AC 22 bin PmB45/80-65). These results confirms
other findings, found in the literature, that claim that
Huet model is not well suited for FE calculations at
higher temperatures, whereas Huet–Sayegh model
corresponds very well especially at higher tempera-
tures (T > +30 �C). One reason for these poor com-
putational results of Huet model is that it does not
allow to fit data, especially phase lag U in the black
diagram at low stiffness values E* (situated on the left
side of the black diagram) very well. As can be seen in
Figure 6 Huet model fitted phase lags are much
higher than phase lags obtained from Power Law or
Huet–Sayegh model fit.
Nevertheless, it has to be mentioned that also the
Power Law and Huet–Sayegh models’ data fitted
parameters could be optimised, if stiffness tests
(according to EN 12697-26 [12]) would be conducted
at higher temperatures (approx. +40 �C) to produce
better data background for phase lag fitting in the
black diagram. As already mentioned in 5.1 and
shown in 5.3, E0 influences FE-calculated axial strains
enormously.
Figure 9: Mesh of undeformed (left) and deformed (middle) TCCT specimen with dimensions (right)
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 13
R. Blab et al. : AFE Approach to Predict Permanent Deformation Behaviour

TCCT FE simulation with constitutive driver
To validate the sensitivity of the presented rheologi-
cal models to a change in the model parameters,
triaxial cyclic compression tests (TCCT) on cylindri-
cal specimens were re-analysed. Because of the
uniform stress state in the sample, the constitutive
driver, only calculating one stress point in the spec-
imen, was used to reduce calculation time.
Again, two materials (AC 22 base 50/70 and AC 22
bin PmB 45/80-65) described in chapter 2 were used
for this sensitivity analysis, carried out on two rheo-
logical models (Power Law model and Huet model).
The material parameters extracted from the Cole-
Cole and black diagrams, shown in Table 3 were used
as origin parameters for this analysis. The variation of
material parameters was chosen by +1% each. Later,
the calculated axial strains after 10 000 load cycles
obtained from the original parameters were com-
pared with the strain history obtained from each
parameter variation. Hereby, the following error
definition (the change in FE-calculated axial strains
De divided by the change in the rheological model
parameter Dparameter) was used.
f ¼ De=Dparameter (38)
These errors are illustrated in Figure 12 for the
Power Law model and in Figure 13 for the Huet
model at three different temperature levels.
The results for the Power Law model showed a
decrease in error for E¥, Ja and k values (be aware of
different units in error definition) from high to low
temperature levels resulting from the decrease in
absolute strain. The failure obtained from a change in
E¥ did not change its value and defined E¥ as a sure
parameter (a variation did not change the result very
much). The weight of the failure obtained from a
change in Ja in comparison with a change in k arised
with dropping temperature (the influence of Ja in
comparison with k arises).
The results obtained from the calculations for the
Huet model again show a decrease in failure from
high to low temperatures and a parameter E¥ that did
not influence the result in a critical manner. At
higher temperatures, only the influence of the short-
term creep parameters (Jb and h) could be seen. When
dropping the temperature, the long-term damper (Jaand k) was activated. The parameters Jb and h lost
weight in comparison with the parameters Ja and k
when leaving the high-temperature regime.
Conclusions
In this paper, constitutive representations of advanced
linear and nonlinear rheological material models (i.e.
Power Law, Huet and Huet–Sayegh model) and their
implementation in a FE code have been presented.
Furthermore, methods are given to derive model
parameter for two specific HMA by means of data fit-
ting with laboratory test data obtained from stiffness
tests according to European Standard EN 12697-26
[12]. Although the considered rheological models
seem to fit very well for the Cole–Cole representations
(diagram consisting of elastic part E1 and viscous part
E2 of the dynamic stiffness values), they did not fit that
properly in the black diagrams representations (dia-
gram consisting of dynamic modulus E* and phase
angle U). For appropriate prediction of permanent
deformations of HMA, occurring at higher tempera-
tures (T > +30 �C), by means of the these rheological
models it is therefore especially important to obtain
Figure 10: Graphical distribution of radial (left) and vertical
(axial) displacements in mm (right) of the deformed TCCT
specimen after 25 000 load cycles (calculated with Huet–Sayegh
model)
14 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.

stiffness and phase lag values also at elevated temper-
atures. Based on a thorough conducted sensitivity
analysis those model parameters have been identified
which should be select especially careful, i.e. in the
Huet–Sayegh model E0 has enormous influences on
the results of re-analysed axial strains. These were
proven by FE calculations simulating triaxial cyclic
compression tests on cylindrical HMA specimen. E0
can only be fitted properly if adequate test data (phase
angle and dynamic modulus) at elevated temperatures
are available.
The research further shows, that the values of the
obtain model parameters can directly be linked to
material characteristics, e.g. the type of binder that
was used for the asphalt mixes, when modified
binder PmB45(70-65) showed higher glass modulus
0 1 2 3 4 5 6 7 8 9
10
0 2000 4000 6000 8000 10 000
Time (s)
Axi
al s
trai
ns (
%)
AC22 base 50/70 (MV tests) FEAP_Power-Law FEAP_Huet FEAP_Huet-Sayegh
0.1
1
10
1 10 100 1000 10 000Time (s)
Axi
al s
trai
ns (
%)
0 1 2 3 4 5 6 7 8 9
10
0 2000 4000 6000 8000 10 000
Time (s)
Axi
al s
trai
ns (
%)
AC22 bin PmB45/80-65 (MV tests) FEAP_Power-Law FEAP_Huet FEAP_Huet-Sayegh
0. 1
1
10
1 10 100 1000 10 000Time (s)
Axi
al s
trai
ns (
%)
AC22 bin PmB45/80-65FEAP_Power-LawFEAP_HuetFEAP_Huet-Sayegh
AC22 base 50/70 FEAP_Power-Law FEAP_Huet FEAP_Huet-Sayegh
Figure 11: Time-axial strain history of TCCT test results (+40 �C) and FE simulation (rheological model parameters for +40 �C)
in linear scale (left side) and logarithmic scale (right side) for AC 22 base 50/70 (upper lane) and the AC 22 bin PmB 45/80-65
materials (lower lane)
+40 °C
0.00E+00
2.00E-04
4.00E-04
6.00E-04
8.00E-04
1.00E-03
1.20E-03
1.40E-03
1.60E-03AC22 base 50/70AC22 bin PmB 45/80-65
+1% E +1% Ja +1% k
+15 °C
0.00E+00
5.00E-06
1.00E-05
1.50E-05
2.00E-05
2.50E-05
3.00E-05
3.50E-05
4.00E-05
4.50E-05
5.00E-05AC22 base 50/70AC22 bin PmB 45/80-65
+1% E +1% Ja +1% k
–10 °C
–5.00E-06
–4.00E-06
–3.00E-06
–2.00E-06
–1.00E-06
0.00E+00
1.00E-06
2.00E-06
3.00E-06
AC22 base 50/70AC22 bin PmB 45/80-65
+1% E +1% Ja +1% k
Figure 12: Failure values obtained from calculations with the Power Law model in the constitutive driver after 10 000 load cycles.
Variation of each material parameter of 1% for AC 22 base 50/70 and the AC 22 bin PmB 45/80-65 materials. Calculated temper-
atures: 40, 15 and )10 �C
� 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16 15
R. Blab et al. : AFE Approach to Predict Permanent Deformation Behaviour

values E¥ than conventional binders (50/70). In a
next step a database with model parameters of
different HMA types and binders will be established
to more accurately investigate the influences of
binder type and HMA composition. These correla-
tions can then be used for the prediction of per-
manent deformation behaviour of different HMA
types within FE simulations of flexible pavement
constructions.
REFERENCES
1. Huet, C. (1963) Etude par une methode d’impedance du
comportement viscoelastique des materiaux hydrocarbones.
PhD thesis. Faculte des Sciences de l’Universite de Paris,
Paris (in French).
2. Sayegh, G. (1965) Variation des modules de quelques bitumes
purs et enrobes bitumineux. These de doctorat d’ingenieur,
Faculte des Sciences de l’universite de Paris (in French).
3. Lai, J. S. and Hufferd, W. L. (1976) Predicting permanent
deformation of asphalt concrete from creep tests. Trans-
portation Research Record 616, Transportation Research
Board, Washington, DC.
4. Sides, A., Uzan, J. and Perl, M. (1985) A comprehensive
visco-elastoplastic characterization of sand-asphalt under
compression and tension cycle loading. J. Test. Eval., 13/1,
49–59.
5. Schapery, R. A. (1999) Nonlinear viscoelastic and visco-
plastic constitutive equations with growing damage. Int. J.
Fract., 97, 33–66.
6. National Cooperative Highway Research Program NCHRP
(1999) Advanced AC mixture material characterization mod-
els framework and laboratory test plan. Final Rep., Submitted
to: NCHRP 9-19, Superpave Support and Performance
Models, Arizona State University, Superpave Models
Team, Washington, DC.
7. Uzan, J. and Levenberg, E. (2007) Advanced testing and
characterization of asphalt concrete materials in tension.
Int. J. Geomech., 03/04, 158–165.
8. Di Benedetto, H., Olard, F., Sauzeat, C. and Delaporte, B.
(2004) Linear viscoelastic behaviour of bituminous mate-
rials: from binders to mixes. Int. J. Road Mater. Pavement
Des., 5, Special Issue EATA, 163–202.
9. Di Benedetto, H., Delaporte, B. and Sauzeat, C. (2007)
Three-dimensional linear behavior of bituminous materi-
als: experiments and modeling. Int. J. Geomech., 03/04,
149–157.
10. Desai, C. S., Somasundaram, S. and Frantziskonis, G.
(1986) Hierarchical approach for constitutive modeling of
geologic materials. Int. J. Numer. Anal. Methods Geomech.,
10, 225–257.
11. Molenaar, A. A. A. (2006) Asphalt mechanics, a key tool for
improved pavement performance prediction. Proceedings, II
European Conference on Computational Mechanics, Lis-
bon, Portugal, 5–8 June 2006.
12. EN 12697-26 (2005) Asphalt – Test Methods for Hot Mix
Asphalt – Part 26: Stiffness. Comite europeen de normali-
sation CEN, Brussels, 2004-10-01.
13. Findley, W. N., Lai, J. S. and Onaran, K. (1989) Creep and
Relaxation of Nonlinear Viscoelastic Materials. Dover Publi-
cations Inc., New York.
14. Blab, R., Kappl, K., Lackner, R. and Aigner, E. (2006) Per-
manent Deformation of Bituminous Bound Materials in Flex-
ible Pavements – Evaluation of Test Methods and Prediction
Models. SAMARIS D28 Main Report, Vienna.
15. EN 12697-25 (2004) Asphalt – Test methods for hot mix
asphalt – Part 25: Cyclic compression test. Comite europeen
de normalisation CEN, Brussels, 2004-12-01.
+40 °C
0.00E+00
5.00E-03
1.00E-02
1.50E-02
2.00E-02
2.50E-02
3.00E-02
3.50E-02
4.00E-02
4.50E-02AC22 base 50/70AC22 bin PmB 45/80-65
+1% E +1% Ja +1% k +1% Jb +1% h
+15 °C
0.00E+00
1.00E-05
2.00E-05
3.00E-05
4.00E-05
5.00E-05
6.00E-05
7.00E-05
8.00E-05
9.00E-05
1.00E-04AC22 base 50/70AC22 bin PmB 45/80-65
+1% E +1% Ja +1% k +1% Jb +1% h
–10 °C
–2.50E-06
–2.00E-06
–1.50E-06
–1.00E-06
–5.00E-07
0.00E+00
5.00E-07
1.00E-06
AC22 base 50/70AC22 bin PmB 45/80-65
+1% E +1% Ja +1% k +1% Jb +1% h
Figure 13: Failure values obtained from calculations with the Huet model in the constitutive driver after 10 000 load cycles.
Variation of each material parameter of 1% for AC 22 base 50/70 and the AC 22 bin PmB 45/80-65 materials. Calculated temper-
atures: 40, 15 and )10 �C
16 � 2009 The Authors. Journal compilation � 2009 Blackwell Publishing Ltd j Strain (2009) 45, 3–16
AFE Approach to Predict Permanent Deformation Behaviour : R. Blab et al.