2€¦ · web viewrobot će taj posao obavljati uspešno sve dok su predmeti koje uzima na tačno...
TRANSCRIPT
Primena industrijskih robota u tehnološkim procesima
2. PRIMENA INDUSTRIJSKIH ROBOTA U TEHNOLOŠKIM PROCESIMA
2. INDUSTRIJSKI ROBOTI
Reč robot iskovao je 1920. Godine Čeh K. Čapek i izvedena je iz reči robota što znači radnik.
Industrijski robot je automatski, servo-upravljani, reprogramibilni, višefunkcionalni manipulator sa više osa sposoban da rukuje materijalom, delovima, alatima ili specijalnim uređajima tokom promenljivih, programiranih operacija za izvršavanje različitih zadataka. Uopštenije govoreći, industrijski robot može biti opisan kao od strane Međunarodne organizacije za standardizaciju (ISO): “Robot je mašina sačinjena od mehanizma koji sadrži nekoliko stepena slobode, često se pojavljuje sa jednom ili više ruku koje se završavaju u struku, sposobna da drži alat, deo na kome se radi ili uređaj za ispitivanje. Naročito, njegov uređaj za kontrolu mora da koristi uređaj za memorisanje kao i senzore koji uzimaju u obzir okruženje i uslove. Ove mašine sa višestrukom namenom obično se izrađuju da obave često ponavljanu radnju i mogu se prilagoditi drugim operacijama.” Korišćenjem robota u potpunosti se može eliminisati ručni rad kako pri pomoćnim, tako i pri osnovnim tehnološkim operacijama.
Kod savremene proizvodnje karakteristična je visoka automatizacija osnovnih tehnoloških procesa, ali se pri tome pomoćne operacije obavljaju ručno. Ove operacije su monotone, primitivne, a često teške, štetne, pa čak i opasne po život. Na njih se se troši dobar deo radnih napora. Pošto se tradicionalnim sredstvima ne mogu automatizovati mnoge pomoćne ručne operacije, pojavila se potreba za realizacijom i širokom primenom industrijskih robota.
Primena industrijskih robota izaziva brojne promene ne samo u sferi proizvodnih sistema već i u oblasti društveno-ekonomskih odnosa. Pošto oni menjaju sadržaj rada u smislu da čoveka oslobađaju od teških, monotonih i opasnih poslova, otvaraju time mogućnosti za zapošljavanje ljudi na kreativnijim i složenijim poslovima koje je moguće obavljati u boljim radnim uslovima.
2.1. Podela robota
Industrijski manipulacioni robot je uređaj opremljen mehaničkom rukom velikih mogućnosti kretanja i upravljačkim sistemom velike autonomije realizovanim na digitalnom računaru. Ovakav robot predstavlja današnju krajnju tačku razvojnog niza industrijskih automata.
2.1.1. Generacije robota
Industrijske robote delimo u tri generacije na osnovu toga u kojoj meri su izražene glavne odrednice robota:
- univerzalnost kretanja i- autonomnost u radu.Pre nego što izložimo karakteristike robota prve generacije spomenimo industrijske
automate koji izvršavaju zadata kretanja po uvek isto definisanim putanjama od tačke do tačke po određenom utvrđenom ciklusu koji se ponavlja, a njihovo pokretanje i zaustavljanje se obezbeđuje prekidačima ili mehaničkim graničnicima. Mada se po nekim definicijama i ovi uređaji svrstavaju u robote, danas je uglavnom prihvaćeno da takvi automatski manipulatori ipak nisu roboti jer je njihova univerzalnost i mogućnost reprogramiranja ograničena.
Roboti prve generacije-programski roboti u stanju su da automatski ponavljaju zadati pokret. Ne radi se tu samo o jednom određenom pokretu, već o proizvoljnom pokretu koji se
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesimarobotu zadaje preko, na primer, zapisa na magnetnoj traci. Novi zadatak podrazumeva novi program. Time se iscrpljuje mogućnost komunikacije sa robotom, a njegova samostalnost ogleda se u preciznom automatskom ponavljanju zadatog kretanja.
Kod ovih robota srećemo dva načina pamćenja zadatog kretanja. Kod starijih tipova robot pamti određeni broj položaja pomoću odgovarajućeg broja grupa potenciometra koji se nalaze na upravljačkom pultu. Svaka grupa potenciometara pamti jedan položaj robota tako što jedan potenciometar iz grupe pamti vrednost pomeranja jednog pokretnog zgloba. U slučaju robota na slici prvi potenciometar u grupi pamti ugao, drugi pamti visinu, a treći izduženje ruke. U režimu automatskog rada robot će se kretati iz jednog položaja u drugi, a putanja između tih položaja ne može se kontrolisati. Kasnije je ovaj pristup modernizovan.
Roboti prve generacije nazivaju se i engleskim terminom plejbek roboti (eng. playback). U slobodnom prevodu to bi značilo ponavljajući roboti, zato što ponavljaju zadato kretanje. Operator uči robota tako što mu pokazuje šta da radi. On to memoriše i snima putanju i sekvence kretanja i nadalje može da ponovi isto kretanje bez ikakvog daljeg uticaja operatora. U slučaju kretanja od tačke do tačke bez mogućnosti upravljanja kretanjem između tačaka koristi se engleski termin “point-to-point” upravljanje, a u slučaju kontinualnog praćenja putanje engleski termin je “continuous path control”.
Kao što vidimo, roboti prve generacuje pružaju prilične mogućnosti za izvršenje različitih praktičnih zadataka. Međutim, bez obzira na njihov automatski rad, njihova samostalnost je, ipak, ograničena. Pokazaćemo to jednim primerom. Zamislićemo zadatak u kome bi robot uzimao predmete sa proizvodne trake i ostavljao ih na za to predviđena mesta. Robot će taj posao obavljati uspešno sve dok su predmeti koje uzima na tačno određenim mestima, mesta na koja se odlažu predmeti prazna, ako nema prepreka, itd. Svaki poremećaj radnih uslova onemogućiće robotu da izvrši zadatak. Dovoljno je da predmet koji se hvata ne bude postavljen na predviđeno mesto sasvim precizno, ili da se u radnom prostoru pojavi prepreka.
Roboti druge generacije-adaptivni roboti su konstruisani tako da se mogu snalaziti u takvim nepredviđenim situacijama u radnom prostoru, a za to moraju biti opremljeni čulima. Pomoću njih će dobijati informacije i ispitivati uslove u radnom prostoru, a moraju imati i programirane postupke ponašanja, odnosno snalaženja u pojedinim situacijama.^ula robota su u stvari davači informacija, odnosno senzori. To su uređaji koji mere i daju informacije o međusobnom položaju i brzini pokretnih delova ruke robota. Te davače nazivamo unutrašnjim. Oni se sreću već kod robota prve generacije. Roboti druge generacije moraju dobijati i informacije o prostoru i stvarima koje ih okružuju. Za to služe davači takozvanih spoljašnjih informacija. Tako, na primer, uzmimo hvataljku robota koja se izrađuje obično u obliku klešta, odnosno šake sa dva prsta. Na unutrašnjoj strani hvataljke mogu se postaviti davači koji će registrovati dodir sa predmetom koji se hvata čime robot dobija informaciju da li je uhvatio predmet ili se hvataljka stisnula “u prazno”. Složeniji davač izmerio bi i silu kojom hvataljka stiska predmet. Senzori dodira mogu se postaviti i na spoljašnje strane hvataljke da bi registrovali dodir sa eventualnom preprekom. Na prednjem delu hvataljke mogu se nalaziti i fotodiode koje će registrovati približavanje bilo kakvog predmeta ili prepreke.
Posredstvom davača robot prima informacije iz radnog prostora i na osnovu njih donosi odluke o svom daljem ponašanju. Ovakav robot mora imati računar koji će primati informacije i donositi odluke. Očigledno, ovakvi sistemi omogućavaju robotu da reaguje u nekim slučajevima poremećaja uslova rada. Ako, na primer, nema predmeta koji treba uzeti sa proizvodne trake, robot će to registrovati, a zatim sačekati da dođe sledeći predmet. Ako naiđe na prepreku on će je “pipajući” zaobići.
Roboti druge generacije mogu obavljati veoma složene zadatke i, zahvaljujući elementima veštačke inteligencije, oni imaju sposobnost snalaženja u nekim nepredvidljivim situacijama. Za razliku od robota prve generacije čiji je cilj bio da izvrše određeni pokret, roboti druge generacije imaju kao cilj izvršenje nekog zadatka i mogu, ako treba, menjati svoje kretanje da bi taj cilj postigli.Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesimaRoboti treće generacije-inteligentni roboti sposobni su da razvoje proces prikupljanja
informacija i donošenja odluke od kasnijeg kretanja kojim se odluke sprovode. Njihov rad možemo pokazati na primeru delova proizvoljno rasutih po podlozi. Dok robot druge generacije pretražuje podlogu pomeranjem hvataljke levo-desno i kada naiđe na neki deo koji registruje senzor dodira uzima ga i postavlja na mesto predviđeno za njegovo odlaganje, robot treće generacije postupa na sledeći način Televizijska kamera snima podlogu, a računar vrši analizu slike i zaključuje gde se nalaze delovi koje treba pokupiti i kako su orijentisani. Posle toga utvrđuje redosled skupljanja koji omogućava najbrže izvršenje. Ako su, međutim, delovi različiti, a bitan je redosled sakupljanja, onda će računar pri analizi slike prepoznati svaki od oblika. Nakon ovog prijema i analize informacija robot kreće na izvršenje zadatka tj. sakupljanje delova.
Roboti treće generacije uglavnom se nalaze u istraživačkim centrima i razvojnim laboratorijama, a još uvek veoma retko u industriji. Razlog za to je činjenica da su veoma skupi i još nedovoljno razvijeni. Međutim, vremenom će ih biti sve više.
Roboti se sve više unapređuju kako bi izvršavali što složenije zadatke. Zato je dalji njihov razvoj bitno vezan za razvoj metoda veštačke inteligencije gde, između ostalog, podrazumevamo i metode prepoznavanja oblika i prepoznavanja govora. Neke buduće generacije robota sigurno će imati sve savršenija čula i savršeniji veštački intelekt.
2.1.2. Podela robota prema geometrijskoj konfiguraciji
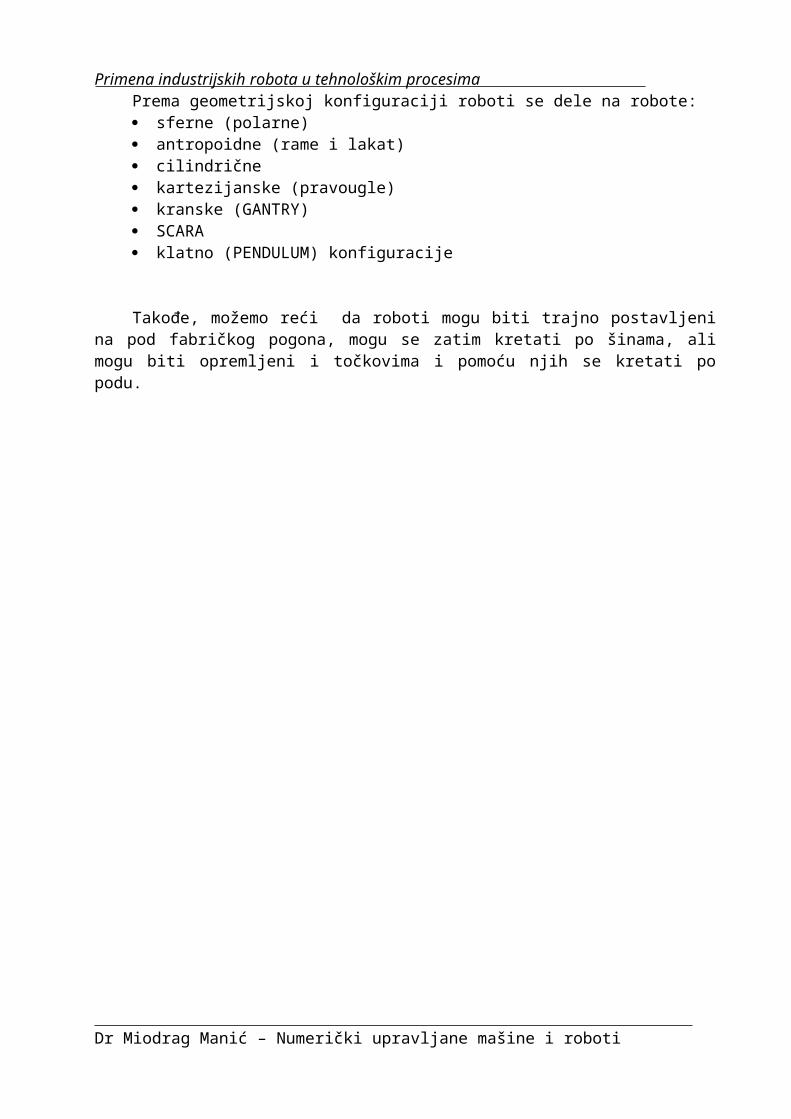
Prema geometrijskoj konfiguraciji roboti se dele na robote: sferne (polarne) antropoidne (rame i lakat) cilindrične kartezijanske (pravougle) kranske (GANTRY) SCARA klatno (PENDULUM) konfiguracije
Takođe, možemo reći da roboti mogu biti trajno postavljeni na pod fabričkog pogona, mogu se zatim kretati po šinama, ali mogu biti opremljeni i točkovima i pomoću njih se kretati po podu.
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesima
Slika 1. Geometrijske konfiguracije robota
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesima
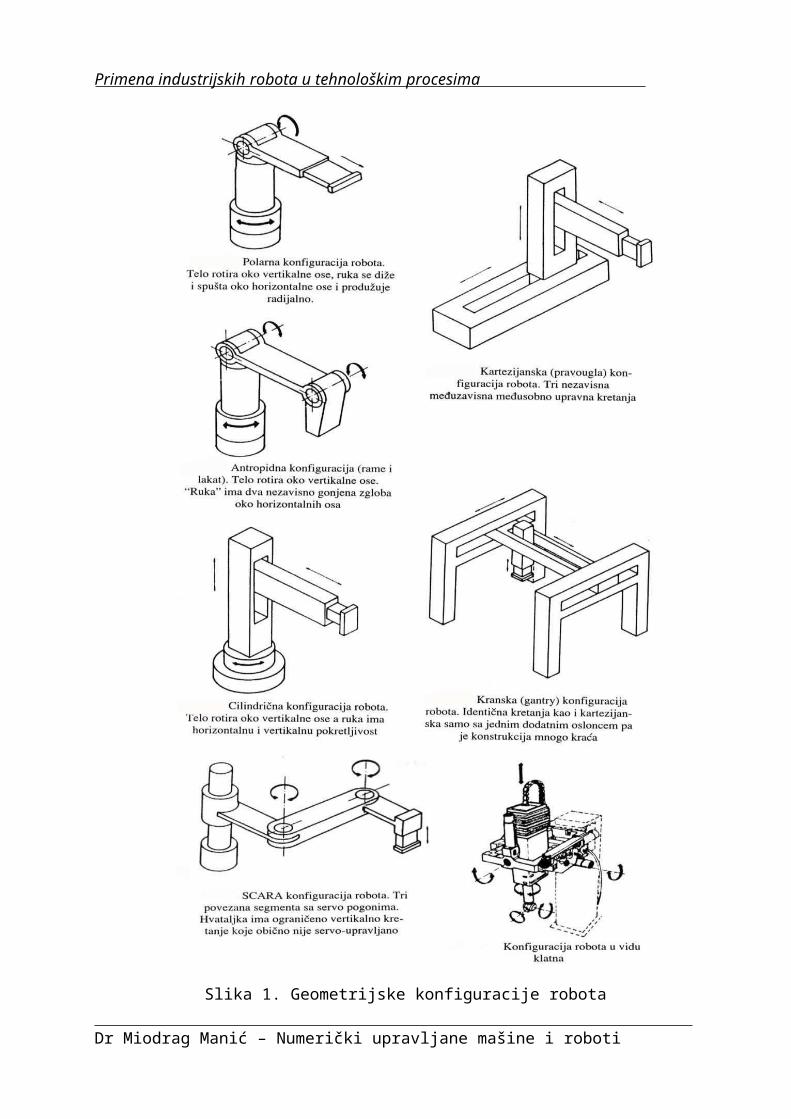
Slika 2. Robot polarne konfiguracije Slika 3. antropoidne konfiguracije
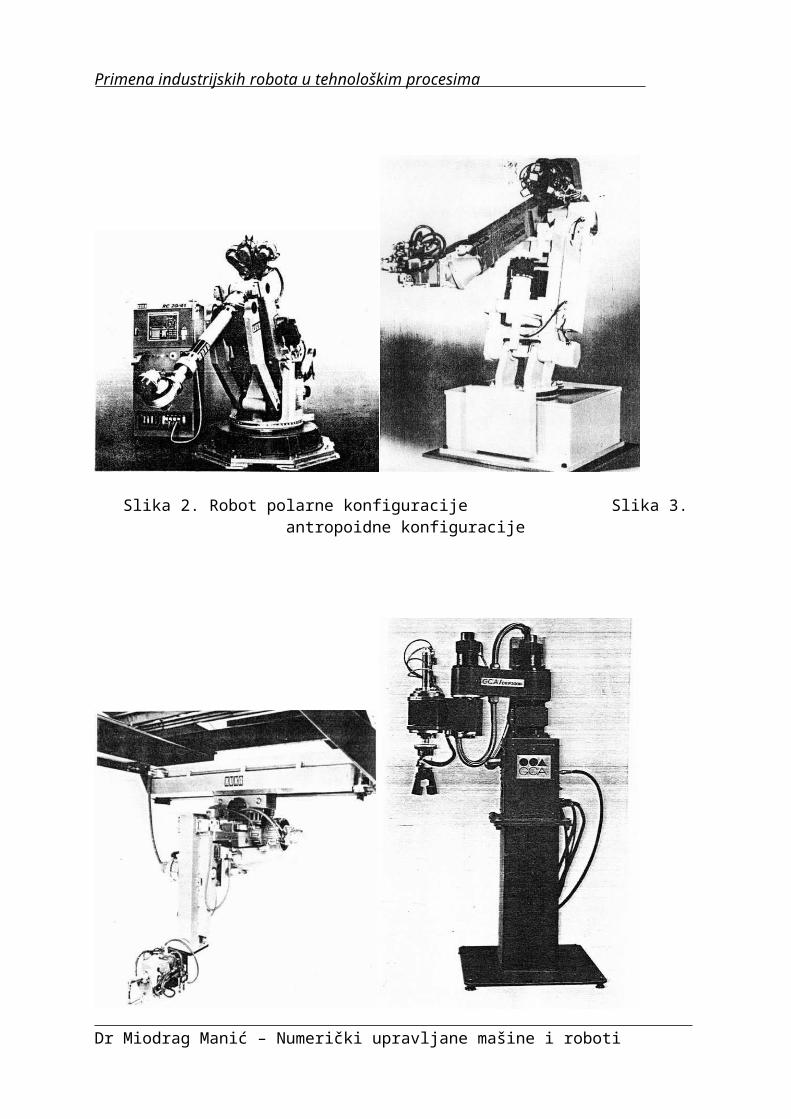
Slika 4. Robot kranske konfiguracije Slika 5. Robot SCARA konfiguracije
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesima
Slika 6. Robot polarne konfiguracije
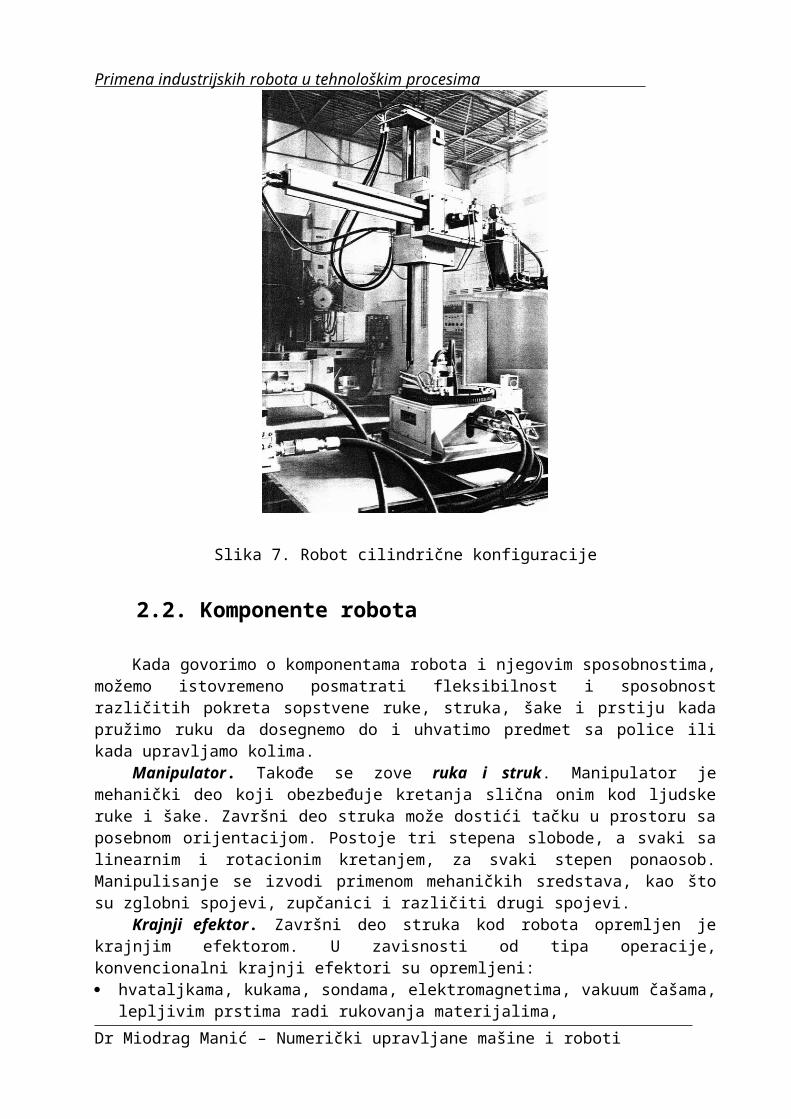
Slika 7. Robot cilindrične konfiguracije
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesima2.2. Komponente robota
Kada govorimo o komponentama robota i njegovim sposobnostima, možemo istovremeno posmatrati fleksibilnost i sposobnost različitih pokreta sopstvene ruke, struka, šake i prstiju kada pružimo ruku da dosegnemo do i uhvatimo predmet sa police ili kada upravljamo kolima.
Manipulator. Takođe se zove ruka i struk. Manipulator je mehanički deo koji obezbeđuje kretanja slična onim kod ljudske ruke i šake. Završni deo struka može dostići tačku u prostoru sa posebnom orijentacijom. Postoje tri stepena slobode, a svaki sa linearnim i rotacionim kretanjem, za svaki stepen ponaosob. Manipulisanje se izvodi primenom mehaničkih sredstava, kao što su zglobni spojevi, zupčanici i različiti drugi spojevi.
Krajnji efektor. Završni deo struka kod robota opremljen je krajnjim efektorom. U zavisnosti od tipa operacije, konvencionalni krajnji efektori su opremljeni: hvataljkama, kukama, sondama, elektromagnetima, vakuum čašama, lepljivim prstima radi
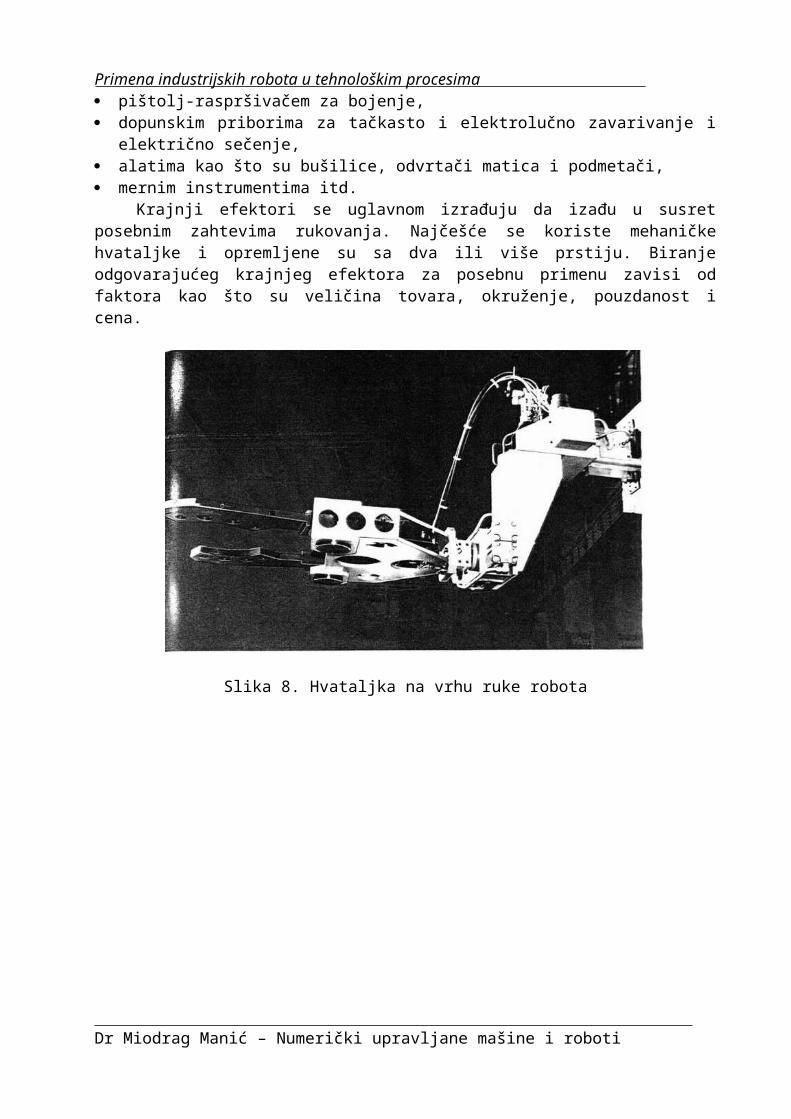
rukovanja materijalima, pištolj-raspršivačem za bojenje, dopunskim priborima za tačkasto i elektrolučno zavarivanje i električno sečenje, alatima kao što su bušilice, odvrtači matica i podmetači, mernim instrumentima itd.
Krajnji efektori se uglavnom izrađuju da izađu u susret posebnim zahtevima rukovanja. Najčešće se koriste mehaničke hvataljke i opremljene su sa dva ili više prstiju. Biranje odgovarajućeg krajnjeg efektora za posebnu primenu zavisi od faktora kao što su veličina tovara, okruženje, pouzdanost i cena.
Slika 8. Hvataljka na vrhu ruke robota
Dr Miodrag Manić – Numerički upravljane mašine i roboti

Primena industrijskih robota u tehnološkim procesima
Slika 9. Nošeni alat na ruci robota
Izvor energije. Svako kretanje manipulatora, bilo rotaciono ili linearno, kontroliše se i reguliše nezavisnim aktuatorima, primenom električnih, pneumatskih ili hidrauličnih izvora energije. Svaki izvor energije i motori koji su uključeni imaju svoje karakteristike, prednosti i ograničenja.
Kontrolni sistem. Takođe je poznat i kao kontroler. Kontrolni sistem služi za komunikaciju i obradu informacija i daje naredbe za kretanje robota. To je mozak robota. On posreduje sa računarima i drugom opremom, kao što su proizvodni elementi i montažni sistemi. Fidbek uređaji, kao što su prijemnici, važan su deo kontrolnog sistema.
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesima2.2.1. Hvataljke robota
Glavna funkcija hvataljke je da ostvari čvrst (krut) kontakt sa radnim predmetom, da taj kontakt održi tokom određene putanje prenošenja i konačno da oslobodi predmet. Obično govorimo o hvatanju, prenošenju i ispuštanju predmeta.
Hvataljke mogu biti obične ili duple. Dupla hvataljka je uređaj koji se sastoji od dve hvataljke montirane na vrhu robota. Ovakve hvataljke sreću se uglavnom kod zadataka u kojima robot stavlja i vadi radne predmete iz neke mašine (na primer prese). Tada robot jednom hvataljkom prinosi predmet, zatim drugom hvataljkom vadi prethodni predmet iz mašine pre nego što unutra stavi novi; konačno prethodni predmet se odlaže na za to predviđeno mesto. Tako se brzo može izvršiti zamena radnog predmeta u mašini.
Slika 10. Obična (a) i dupla (b) hvataljka
Slika 11. Izgled duple hvataljke
Dr Miodrag Manić – Numerički upravljane mašine i roboti
Primena industrijskih robota u tehnološkim procesimaHvataljke možemo podeliti i prema načinu hvatanja na:
hvataljke sa mehaničkim prstima (sa dva ili više prstiju), hvataljke sa vakuumskim, magnetnim ili athezionim sistemom hvatanja, univerzalne i prilagodljive hvataljke.
Slika 12. Hvataljka tipa “makaza”
Slika 13. Specijalna prilagodljiva hvataljka
2.2.2. Senzori kod robota
Bitna karakteristika robota je njihova samostalnost, koja se menjala i povećavala od njihove prve pojave do danas. Da bi robot mogao raditi samostalno, bez obzira na nivo samostalnosti, on mora biti “svestan” sebe i svoje okoline. Preciznije rečeno, robot mora imati mogućnost merenja sopstvenog položaja i brzine kao i merenja različitih veličina u radnoj okolini čime stiče predstavu o spoljnom prostoru. Različiti merni uređaji i sistemi kojima robot dobija informacije o sebi i okolini nazivaju se senzori. Danas su to uređaji za merenje ugaonog i translatornog pomeranja, različiti senzori dodira, uređaji za merenje rastojanja, sile, ubrzanja i sl. Posebnu klasu senzorskih sistema čine vizuelni sistemi, danas često u upotrebi. Kako se od robota u budućnosti očekuje izuzetna samostalnost, to je neophodan uslov za to napredak u senzorskoj tehnici kao što je, na primer, čulo dodira sa mogućnošću određivanja glatkoće i mekoće površine, trodimenzionalna vizija, čulo sluha sa prepoznavanjem govora itd.
Senzore možemo podeliti na unutrašnje senzore tj. senzore pozicije (daju informacije o položaju robota i tri najrasprostranjenija su potenciometar, enkoder i rezolver), spoljašnje senzore tj. senzore okoline (daju informacije o okolini i tu spadaju senzori sile, taktilni i Dr Miodrag Manić – Numerički upravljane mašine i roboti

Primena industrijskih robota u tehnološkim procesimaultrazvučni senzori) i robotsku viziju čija je uloga da da informaciju o izgledu i prostornoj raspodeli objekata koji se nalaze u okolini objekata.
Dalja podela senzora bi bila na: mehaničke - za merenje veličina kao što su položaj, oblik, brzina, sila, obrtna sila, pritisak,
vibracija, naprezanje i masa, električne - za merenje napona, struje, provodljivosti, magnetne - za merenje magnetnog polja, fluksa itd, termičke - za merenje temperature, provodljivosti i specifične toplote, ostale - kao što su akustični, ultrasonični, hemijski, optički i drugi.
Dr Miodrag Manić – Numerički upravljane mašine i roboti