wspomniane w rozdziale 2.3 generowanie zapisu powierzchni … · 2018-09-24 · projektowania i...
TRANSCRIPT

WSTĘP Wspomniane w rozdziale 2.3 generowanie zapisu powierzchni bryły nadwozia na podstawie danych z redukcyjnego lub pełnowymiarowego modelu polega na zdigitalizowaniu (uzyskaniu współrzędnych x,y,z w układzie globalnym) charakterystycznych punktów zmierzonych na modelu . Można posłużyć się w tym celu kilkoma metodami:
• Fotogrametrycznym pomiarem modelu • Skanowaniem wiązką lasera • Pomiarem maszyną współrzędnościową
W dużym skrócie prace strakerskie polegają na aproksymacji krzywymi przestrzennymi zmierzonych punktów lub na wygładzaniu krzywych pozyskanych poprzez automatyczne generowanie przekrojów warstwicowych z chmury punktów pomiarowych. Na tak przygotowanych krzywych, w dalszej kolejności, rozpina się powierzchnie. Warstwicowe krzywe przestrzenne w płaszczyznach YZ
Rozdział 2.4, informacje o geometrii powierzchni nadwoziowych zebrał i przedstawił mgr inż. Sławomir Kreft.

2.4 Geometria powierzchni nadwozia
Wprowadzenie
Powierzchnia zewnętrznego poszycia nadwozia samochodu jest podstawowym
czynnikiem decydującym o jego wyglądzie. Walory estetyczne nadwozia, jak również i jego
właściwości aerodynamiczne zależą ściśle od płynności i jakości powierzchni oraz głównych
linii podziałów na poszczególne elementy i ewentualnych linii przetłoczeń. W procesie
projektowania i konstrukcji nadwozia tworzenie powierzchni , a następnie dokładne ich
określenie wymiarowe, jest etapem niezbędnym, specyficznym dla nadwozia, a zarazem
najbardziej decydującym o ostatecznym efekcie w postaci gotowego produktu. Dlatego
zarówno styliści, jak i konstruktorzy muszą wykazać się znajomością zależności
geometrycznych związanych z krzywymi i zasadami tworzenia powierzchni opartych na tych
krzywych, jak również zasadami ich modyfikacji.
Znane są dwie metody opracowywania powierzchni nadwozia: wykreślna i
komputerowa. Ponieważ ta pierwsza jest już dzisiaj metodą praktycznie niestosowaną, w
niniejszej pracy zostanie opisana jedynie metoda komputerowa. Tą ostatnią metodę
zastosowano również w projektowaniu powierzchni nadwozia będącego tematem niniejszej
pracy.
Metoda komputerowa opracowywania powierzchni polega na bezpośrednim tworzeniu
powierzchni w wirtualnej przestrzeni trójwymiarowej. Metoda ta opiera się na wykorzystaniu
sprzętu komputerowego o dużej mocy przeliczeniowej oraz odpowiedniego oprogramowania.
Do najczęściej stosowanych dzisiaj w tym celu programów należą: Alias Wavefront,
ICEMSurf, Unigraphics oraz CATIA V5.
Do zalet metody komputerowej należą:
- skrócenie czasu kształtowania powierzchni
- szybki elektroniczny zapis parametrów powierzchni w postaci cyfrowej
- łatwość oceny jakości opracowywanej powierzchni
- możliwość przeprowadzania oceny jakości na bieżąco
- łatwość wprowadzania ewentualnych korekt lub modyfikacji
- znaczne skrócenie całego cyklu tworzenia nadwozia
- niewielki czas i łatwość wykonania dokumentacji technicznej na papierze (plotowanie)
- możliwość wykorzystania zapisu cyfrowego do kolejnych etapów (obliczenia MES,
podstawa dla programów obrabiarek sterowanych numerycznie)

- złożenie całego nadwozia w postaci cyfrowej można wykorzystać do różnego rodzaju
badań symulacyjnych, jak np. badania aerodynamiki, bezpieczeństwa, akustyki).
Rodzaje powierzchni nadwozia
Najbardziej podstawowy podział powierzchni nadwozia rozróżnia cztery ich typy. Są to
powierzchnie płaskie, obrotowe, prostokreślne i krzywokreślne.
Powierzchnie płaskie są bardzo rzadko stosowane na elementy poszycia zewnętrznego,
ze względu na nienajlepsze walory estetyczne, ale również i mechaniczne (bardzo mała
sztywność i związane z tym drgania własne). Właściwości powierzchni płaskiej mogą
poprawić przetłoczenia, ale z zasady unika się dzisiaj elementów płaskich poszyć, nawet w
samochodach dostawczych, gdzie jeszcze niedawno stosowano takie powierzchnie.
Powierzchnię płaską w systemach CAD buduje się przez utworzenie płaszczyzny, a następnie
wygenerowanie krzywych na tej płaszczyźnie ograniczających szukaną powierzchnię.
Rys. Powierzchnia płaska i jej wygenerowany obraz z przetłoczeniem
Powierzchnie obrotowe buduje się przez obrót płaskiej krzywej wokół prostej
stanowiącej oś obrotu. O kształcie powierzchni decyduje więc płaski profil. Obrót krzywej
można wykonać o dowolny kąt, niekoniecznie o 360 st. Przykładem powierzchni obrotowej w
nadwoziu pojazdu jest wewnętrzne poszycie nadkola tylnego koła.
Rys. Powierzchnia obrotowa i reprezentacja jej obrazu
Powierzchnia prostokreślna jest to powierzchnia posiadająca krzywiznę tylko w jednym
kierunku. Powstaje ona przez zbudowanie powierzchni pierwszego stopnia między dwiema

krzywymi przestrzennymi. Stopień wielomianu opisującego powierzchnię w zadanym
kierunku wynosi 1, gdy system buduje powierzchnię na podstawie równania parametrycznego
prostej. Szczególnym rodzajem powierzchni prostokreślnej jest powierzchnia walcowa, która
powstaje przez przesunięcie dowolnego profilu o zadany wektor. Zastosowanie powierzchni
tego typu w nadwoziach jest bardzo ograniczone, czasami są stosowane w nadwoziach
uniwerslanych i furgonowych na poszycia dachu i boków.
Rys. Powierzchnia prostokreślna (walcowa) z siatką kontrolną i reprezentacja jej obrazu
Powierzchnie krzywokreślne posiadają krzywiznę w obydwu kierunkach. Jest to typ
powierzchni stosowany bardzo szeroko jako poszycia zewnętrzne nadwozi. W systemach
CAD rozróżnia się trzy typy powierzchni krzywokreślnych: powierzchnie brzegowe,
powierzchnie z profili przesuwanych oraz powierzchnie swobodne.
• Powierzchnia brzegowa to powierzchnia opisana matematycznie czterema lub rzadziej
trzema krzywymi ograniczającymi. Krzywa brzegowa powinna być opisana funkcją
spełniającą co najmniej warunek ciągłości C1. Zmiana charakteru krzywej brzegowej
powoduje zmianę kształtu powierzchni, przez co można ją niemal w dowolny sposób
modyfikować lub dostosowywać do powierzchni sąsiadujących.

.
Rys. Powierzchnia krzywokreślna z siatką kontrolną i reprezentacja jej obrazu
• Powierzchnia z profili przesuwanych ma taki sam opis matematyczny, jak
powierzchnia brzegowa, wyznaczana jest jednak inaczej. W systemach CAD wyróżnia
się kilka metod tworzenia tego rodzaju powierzchni. Profil może być przesuwany i
skalowany wzdłuż krzywych prowadzących, bądź mogą istnieć dwa profile –
początkowy i końcowy – od których zależy kształt powierzchni. Są również
przypadki, w których profil bazuje tylko na jednej krzywej prowadzącej.
• Powierzchnia swobodna jest to powierzchnia krzywokreślna skonstruowana na
podstawie zadanego zbioru punktów bądź krzywych generacyjnych. Powierzchnia
typu Beziera lub NURBS budowana jest automatycznie przez system za pomocą
wewnętrznego narzędzia matematycznego, aproksymującego dane wejściowe. W
wyniku tego powierzchnia ta prawie zawsze posiada jakąś odchyłkę w stosunku do
danych wejściowych. Jak łatwo zauważyć, im większy stopień wielomianów
opisujących powierzchnię, tym odchyłka będzie mniejsza. Należy jednak pamiętać, że
zwiększanie stopnia powoduje spadek jakości powierzchni i może ona wtedy posiadać
znaczne błędy geometryczne. Powierzchnie swobodne stosuje się zwykle do opisu
powierzchni zewnętrznych nadwozia, ponieważ oddają one w możliwie najbliższy
sposób kształt architektoniczny nadwozia. Takie powierzchnie mają szerokie
zastosowanie np. podczas digitalizacji modelu rzeczywistego w celu utworzenia
modelu wirtualnego.

Podstawy modelowania krzywych i powierzchni Wstęp
Reprezentacje figur (krzywych i powierzchni) geometrycznych stosowane w
projektowaniu przy zastosowaniu technik komputerowych powinny wykazywać się
następującymi własnościami:
• powinny być wygodne dla projektanta, tak aby dzięki nabytemu doświadczeniu oraz
wyczuciu mógł on w sposób łatwy i wygodny tworzyć, jak również i modyfikować
projekty;
• powinny umożliwiać łatwą realizację algorytmów przetwarzania, co pozwala
obniżyć koszty wprowadzania systemów modelowania;
• powinny istnieć stosunkowo szybkie algorytmy reprezentacji (rendering) obrazów
danych figur, co ma zasadniczy wpływ na wygodę oraz efektywność pracy
projektanta;
• powinny umożliwiać weryfikację założeń projektowych (np. tolerancje kształtu);
• powinny umożliwiać badanie utworzonego modelu komputerowego jeszcze przed
wykonaniem prototypu (np. obliczenie pola powierzchni lub masy)
Stosowaną obecnie metodą określania krzywych i powierzchni, spełniającą w
wystarczający sposób powyższe założenia, jest metoda oparta o opis parametryczny.
Polega ona na wprowadzeniu pewnego odwzorowania, które punktom dziedziny (zbiór
parametrów) przyporządkowuje punkty w przestrzeni.
Krzywe Béziera
Dzisiaj większość zaawansowanych programów wykorzystywanych przy projektowaniu nie tylko nadwozi, ale również i innych form przestrzennych, opiera się na opisie parametrycznym krzywych opracowanym przez Pierre’a Béziera. Od jego nazwiska pochodzi też nazwa tych krzywych. Należy w tym miejscu podkreślić, że Pierre Bézier opracował specyficzną tę postać wielomianu opisującego krzywe właśnie dla potrzeb projektowania nadwozi, w firmie Renault.
Jedną z definicji krzywej Béziera jest określenie jej jako krzywej p, której każdy punkt p(t) można skonstruować według algorytmu de Casteljau, który opisany jest poniżej.
Algorytm de Casteljau. Wybierzmy dowolny ciąg n+1 punktów p0,...,pn. Rozważmy
łamaną, której kolejnymi wierzchołkami są te punkty. Dokonamy podziału wszystkich n
odcinków tej łamanej w pewnej ustalonej proporcji t : 1-t. Otrzymujemy n punktów, które

tworzą wierzchołki kolejnej łamanej, złożonej z n-1 odcinków. Proces ten powtarzamy aż do
chwili, gdy otrzymamy jeden punkt.
Rys. Schemat algorytmu de Casteljau
Zmieniając parametr liczbowy t otrzymamy zbiór punktów, które wyznaczą nam
krzywą. Jest to krzywa Béziera. Punkty zadane na początku nazywane są punktami
kontrolnymi, a wyjściowa łamana to łamana kontrolna krzywej Béziera.
Wielomiany Bernsteina. Reprezentacja Béziera krzywych wielomianowych opiera się
na pewnych funkcjach bazowych. Okazuje się, że funkcjami tymi są wielomiany Bernsteina,
ponieważ punkty kontrolne krzywej Béziera są współczynnikami krzywej w bazie
wielomianów Bernsteina, tj.:
)()(0
tBptp ni
n
ii∑
=
= ;
Wielomiany Bernsteina stopnia n są zdefiniowane wzorem:
inini tt
in
tB −−⎟⎟⎠
⎞⎜⎜⎝
⎛= )1()( dla i = 0, ..., n
Rys. Wykresy wielomianów Bernsteina
Wielomiany Bernsteina są liniowo niezależne i jest ich n+1, stanowią więc bazę
przestrzeni wielomianów stopnia nie większego niż n. Dodatkowo przyjmuje się umowę
0)( =tB ni dla i < 0 lub i > n
Wielomiany te spełniają również zależność:

)()()1()( 11
1 ttBtBttB ni
ni
ni
−−
− +−=
Ponieważ wielomiany Bernsteina są podstawą reprezentacji Béziera krzywych
wielomianowych, poznanie własności tych funkcji umożliwia zbadanie własności
reprezentacji.
Rozkład jedynki:
1)(0
=∑=
tBn
i
ni
Dodatniość:
0)(]1,0[ ≥⇒∈ tBt ni
Rozkład jedynki oraz dodatniość wielomianów Bernsteina są warunkami koniecznymi i
dostatecznymi własności otoczki wypukłej krzywych Béziera (oznacza to, że wszystkie
łamane tworzone przez obcinanie narożników i krzywa graniczna, która powstaje w wyniku
tego, zawierają się zawsze w otoczce wypukłej wierzchołków łamanej wyjściowej).
Symetria:
)1()( tBtB nin
ni −= −
Oznacza to, że jeśli łamana kontrolna jest symetryczna względem pewnego punktu, to
krzywa Béziera również wykazuje tę symetrię.
Pochodna:
))()(()( 111 tBtBntB
dtd n
ini
ni
−−− −=
Powyższy wzór stosuje się do znalezienia pochodnych krzywych Béziera i zbadania ich
własności.
Podwyższanie i obniżanie stopnia
Podwyższenie stopnia krzywej Béziera jest procesem zwiększania liczby punktów
kontrolnych. Możliwe jest podwyższenie stopnia krzywej Béziera bez zmiany jej charakteru,
gdyż proces ten jest niczym innym tylko obcinaniem narożników łamanej kontrolnej, a można
udowodnić, że krzywą Béziera można otrzymać przez obcinanie narożników łamanej
kontrolnej przeprowadzone dostatecznie wiele razy. Oznacza to, że istnieje nieskończenie
wiele reprezentacji Béziera dowolnej krzywej wielomianowej. Względy praktyczne skłaniają
jednak do stosowania w projektowaniu reprezentacji o najniższym stopniu, który umożliwia
osiągnięcie założonych celów.

Rys. Podwyższanie stopnia krzywej Béziera oraz schemat ogólny obcinania narożników
Podwyższanie stopnia krzywej Béziera stosuje się między innymi w celu:
- uzyskania większej swobody kształtowania krzywej
- uzgodnienia reprezentacji krzywych (m. in. łączenie dwóch krzywych i związane z
tym zrównanie stopni)
Operacja przeciwna do podwyższania stopnia, a więc obniżanie stopnia krzywej
Béziera, może być prowadzona tylko do określonego momentu (w zależności od
rzeczywistego opisu parametrycznego krzywej). Dalsze obniżanie odbywa się już na zasadzie
aproksymacji, a więc znalezieniu krzywej w jak najmniejszym stopniu odbiegającej od
zadanej.
Pochodne krzywej Béziera i łączenie krzywych
Pochodna krzywej Béziera stopnia n może być przedstawiona jako krzywa Béziera
stopnia n-1, której punktami kontrolnymi są wektory n∆pi, i=0,...,n-1.
Rys. Pochodna krzywej Béziera w punkcie t
Z powyższego rysunku wynika, że aby wektor pochodnej w połączeniu odpowiednich
krzywych Béziera był ciągły, krzywe łamane muszą być połączone w taki sposób, że
przedostatni punkt kontrolny pierwszej krzywej, wspólny punkt brzegowy krzywych (n-ty dla
pierwszej i zerowy dla drugiej krzywej) oraz pierwszy punkt kontrolny drugiej krzywej,
powinny leżeć na jednej prostej. Jest to zilustrowane na poniższym rysunku.

Rys. Łączenie krzywych Béziera w sposób zapewniający ciągłość C1
Pochodna k-tego rzędu w punkcie brzegowym zależy tylko od punktów p0,...,pk. Inaczej
mówiąc wektory pochodnych do rzędu k w punkcie początkowym i końcowym, są określone
przez k+1 pierwszych albo ostatnich punktów kontrolnych. Warunki ciągłości pochodnych
rzędu 1,...,k krzywej złożonej z dwóch połączonych krzywych Béziera stopnia n>k, a więc
połączonych z ciągłością Ck, można otrzymać z podziału krzywej przez wyżej opisany
algorytm de Casteljau.
W najprostszy sposób można to opisać następująco: jeśli dwie krzywe q i r są połączone
z ciągłością Ck, to punkty pośrednie w algorytmie de Casteljau, stanowiące dane dla ostatnich
k+1 iteracji, powinny być identyczne niezależnie od tego, czy odtwarzamy je na podstawie
łamanej krzywej q czy r.
Rys. Połączenie krzywych z ciągłością C2
Rys. Połączenie krzywych z ciągłością C3
Powyższe rysunki świadczą o tym, że wymieniany i stosowany przez niektórych
specjalistów warunek leżenia na jednej prostej odpowiednio k+1 pierwszych i k+1 ostatnich
punktów kontrolnych w połączeniu dwóch krzywych z ciągłością Ck, nie jest warunkiem

koniecznym, a jedynie łatwym do graficznej realizacji. Jednak współczesne programy
umożliwiają już automatyczne łączenie krzywych i powierzchni z ciągłością C2, więc nie
zachodzi już potrzeba ręcznego manipulowania punkami kontrolnymi.
Poniżej przedstawiony jest efekt działania automatycznej opcji programu Catia V5R10
umożliwiającej łączenie krzywych z zadaną ciągłością. Wygenerowano dwie krzywe Béziera
stopnia trzeciego, które początkowo spełniały tylko warunek ciągłości C0, a więc jedynie
stykały się ze sobą końcami. Wbudowaną funkcją Catii połączono krzywe z ciągłością C1, a
więc nadano krzywym styczność i obserwowano zachowanie się punktów kontrolnych.
Punkty kontrolne zostały przesunięte zgodnie z teorią podaną wyżej. Nadanie ciągłości
krzywizny C2 również zmieniło położenie punktów kontrolnych według powyższych teorii –
jedynie trzy punkty kontrolne leżą na wspólnej prostej.
Rys. Połączenie krzywych z ciągłością C0 wygenerowane w programie Catia
Rys. Połączenie krzywych z ciągłością C1 wykonane przez wbudowaną opcję programu Catia V5
Rys. Połączenie krzywych z ciągłością C2 wykonane przez wbudowaną opcję programu Catia V5

Płaty powierzchni Béziera
Płat powierzchni jest odwzorowaniem obszaru dwuwymiarowego w przestrzeni i do
jego określenia potrzebne są funkcje dwóch zmiennych.
Jedną z metod określenia przestrzeni funkcji dwóch zmiennych jest zastosowanie
iloczynu tensorowego. Iloczyn tensorowy przestrzeni V1 i V2 funkcji jednej zmiennej (np.
wielomianów) jest przestrzenią liniową rozpiętą przez iloczyny funkcji f(u)g(v), gdzie 1Vf ∈
, . Jeżeli zbiory funkcji {f2Vg ∈ 0,...,fn} i {g0,...,gm} stanowią bazy przestrzeni V1 i V2, to
zbiór funkcji {fi(u)gj(v): i=0,...,n, j=0,...,m} jest bazą tensorową przestrzeni V.
Rys. Płat powierzchni Béziera z siatką kontrolną
Prostokątne płaty powierzchni Béziera stopnia (n,m), są określone wzorem:
)()(),(0 0
vBuBpvup mj
ni
n
i
m
jij∑∑
= =
=
Aby określić płat stopnia (n,m), należy więc podać (n+1)(m+1) punktów kontrolnych pij.
Zbiór odcinków łączących punkty kontrolne nazywamy siatką kontrolną płata. W siatce
kontrolnej wyróżnia się wiersze i kolumny.
Sposób określenia płata Béziera umożliwia zastosowanie do niego wszystkich twierdzeń
i algorytmów związanych z krzywymi Béziera. Łatwo zauważyć, że skrajne wiersze i
kolumny siatki kontrolnej opisują krzywe brzegowe płata. Wyznaczanie punktów płata można
przeprowadzić uogólnionym algorytmem de Casteljau przez wyznaczanie punktów na
krzywych. Podwyższenie stopnia płata ze względu na jedną ze zmiennych polega na
podwyższeniu stopnia odpowiednio wszystkich wierszy lub kolumn w siatce kontrolnej płata.
Łączenie płatów Béziera

Metoda łączenia płatów powierzchni w celu osiągnięcia ciągłości zadanego rzędu jest
bezpośrednim uogólnieniem opisanej wyżej metody łączenia krzywych Béziera. Wiersze i
kolumny siatek kontrolnych łączy się podobnie jak łamane krzywych. Utożsamienie
łamanych krzywych brzegowych tworzy ciągłość C0. Narzucenie warunku „powstania
podziału z większego płata” (algorytm de Casteljau z dwóch kierunków) na każdą kolumnę
lub wiersz „równoległy” podwyższa rząd ciągłości połączenia o 1.
Rys. Połączenia płatów Béziera z zachowaniem ciągłości C1 i C2
Krzywe B-sklejane
Opisane wcześniej krzywe i płaty powierzchni Béziera obok licznych zalet mają
również poważne wady z punktu widzenia praktycznych zastosowań.
Po pierwsze niemożliwe jest wprowadzanie lokalnych zmian, gdyż przesunięcie punktu
kontrolnego powoduje zmianę kształtu całej krzywej bądź całego płata. Może to się okazać
niewygodne lub nawet niepożądane w przypadku, jeśli pewne fragmenty projektowanego
przedmiotu są już ukształtowane oraz dopracowane, i działając w innym miejscu nie chcemy
tego popsuć.
Po drugie w przypadku modelowania skomplikowanych kształtów konieczne jest
korzystanie z krzywych lub płatów wysokiego stopnia. Manipulowanie punktami kontrolnymi
staje się wtedy niewygodne dlatego, że dla modyfikacji krzywej należy przesuwać punkty
kontrolne na duże odległości, a krzywa coraz bardziej odbiega od charakteru krzywej

łamanej. Ponadto obliczenia dla krzywych Béziera wysokiego stopnia są drogie i kłopotliwe
w realizacji komputerowej.
Rys. Porównanie krzywej Béziera stopnia 7 (a) z kubiczną krzywą B-sklejaną (b)
Powyższych wad nie posiadają krzywe składające się z wielu łuków wielomianowych
stosunkowo niskiego stopnia, zwane krzywymi sklejanymi lub potocznie splajnami. Krzywe
takie pozwalają na modyfikację tylko pewnych ich fragmentów, bez zmiany pozostałych.
Jednocześnie dają możliwość modelowania bardzo skomplikowanych kształtów poprzez
dobranie odpowiedniej w zależności do potrzeb liczby łuków. Można konstruować krzywe
interpolacyjne o kształcie zgodnym z intuicyjnymi oczekiwaniami.
W praktyce stosuje się krzywe sklejane z łuków wielomianowych trzeciego stopnia
(tzw. kubiczne) z poniższych powodów:
• stopień 2 jest zbyt mały, ponieważ krzywe drugiego stopnia są krzywymi
płaskimi, a krzywa przestrzenna zbudowana na ich podstawie jest kawałkami
płaska, co ze względu na estetykę eliminuje praktyczne zastosowanie takich
krzywych;
• stopień 3 jest minimalnym, dla którego można osiągnąć ciągłość pochodnej
drugiego rzędu (ciągłość krzywizny) w punkcie wspólnym dwóch łuków
opisanych różnymi wielomianami;
• kubiczne interpolacyjne krzywe sklejane, w odróżnieniu od krzywych
wielomianowych wysokiego stopnia, między danymi punktami mają bardzo
dobry przebieg i zachowanie;
Konstrukcja kubicznych krzywych B-sklejanych opiera się na warunku ciągłości C2
połączeń krzywych Béziera. Schemat przedstawiony jest na rysunku.

Rys. Połączenie dwóch kubicznych krzywych Béziera z zachowaniem warunku ciągłości C2
Wychodzimy od łamanej o wierzchołkach q0,q1,d,r2,r3. Punkty q1, d i r2 możemy uznać
za wierzchołki łamanej kontrolnej krzywej stopnia drugiego i wykonać algorytm de Casteljau,
dzieląc jej odcinki w zadanej proporcji. W wyniku powstają punkty q2, q3=r0 i r1, spełniające
równania ciągłości. Otrzymujemy parę gładko połączonych krzywych Béziera trzeciego
stopnia. Powyższą procedurę można uogólnić do konstrukcji dowolnej liczby m gładko
połączonych krzywych Béziera.
Wymierne krzywe B-sklejane (krzywe NURBS)
Nazwa NURBS, używana do określania wymiernych krzywych B-sklejanych, jest
skrótem angielskiej nazwy tych krzywych non-uniform rational B-spline. Określenie non-
uniform oznacza nierównomierne i odnosi się do ciągu węzłów zastosowanych do określenie
funkcji bazowych; węzły te nie muszą być równoodległe.
Wymierna krzywa B-sklejana określona jest wzorem:
∑
∑−−
=
−−
== 1
0
1
0
)(
)()( nN
i
nii
nN
i
niii
tNw
tNdwts
gdzie di oznaczają punkty kontrolne, a wi współczynniki wagowe lub po prostu wagi.
Funkcje bazowe są określone dla pewnego ciągu węzłów. Dziedziną krzywej jest odcinek
[u
niN
n, uN-n]. Kształtowanie krzywej wymiernej B-sklejanej polega na rozmieszczaniu lub
przesuwaniu punktów kontrolnych i dobieraniu wag poszczególnych punktów. Można też
manipulować węzłami użytymi do określenia funkcji bazowych.

Rys. Działanie wag wymiernej krzywej B-sklejanej
Można wykazać następujące własności krzywych NURBS:
- jeśli wszystkie wagi są równe pewnej stałej różnej od 0, to krzywa wymierna jest
identyczna z krzywą wielomianową;
- zmiana wszystkich wag polegająca na przenożeniu ich przez pewną stałą różną od 0,
nie powoduje żadnych zmian geometrycznych krzywej;
- relacja między punktami kontrolnymi a wymierną krzywą B-sklejaną jest
niezmiennicza afinicznie, co oznacza, że obraz punktów kontrolnych w przekształceniu
afinicznym określa obraz krzywej w tym przekształceniu;
- kontrola kształtu za pomocą punktów kontrolnych jest ściśle lokalna, podobnie jak
efekt zmiany wagi jest ograniczony tylko do fragmentu krzywej;
Rys. Lokalna kontrola kształtu krzywej B-sklejanej
W wielu programach komputerowych, mimo że istnieje możliwość tworzenia krzywych
NURBS, zastrzeżona jest zmiana wag (wagi wszystkich punktów są określone na poziomie
1). Wobec tego w rzeczywistości krzywe te są krzywymi wielomianowymi, a nie
wymiernymi.

Powierzchnie B-sklejane
Płaty powierzchni B-sklejanych są określane w podobny sposób jak płaty prostokątne
powierzchni Béziera. Mając dane dwie przestrzenie liniowe funkcji sklejanych, stopni n i m,
opartych na ciągach węzłów odpowiednio u0,...,uN i v0,...,vN, można określić ich iloczyn
tensorowy. Płat powierzchni B-sklejanej stopnia (n,m) jest opisany wzorem:
∑ ∑−−
=
−−
=
=1
0
1
0
)()(),(nN
i
mM
j
mj
niij vNuNdvus
Reprezentacja płata składa się z liczb n i m określających stopień płata, dwóch ciągów
węzłów oraz (N-n)(M-m) punktów kontrolnych dij. Punkty kontrolne płata tworzą siatkę, w
której wyróżnia się wiersze i kolumny.
Rys. Płat powierzchni B-sklejanej z siatką kontrolną
W przypadku powierzchni NURBS, a więc wymiernych płatów powierzchni B-
sklejanej, oprócz węzłów i punktów kontrolnych, trzeba podać współczynniki wagi – po
jednym dla każdego punktu kontrolnego.
Metody oceny powierzchni Zasadnicze znaczenie podczas modelowania, jak również i po zakończeniu projektu, ma
możliwość dokonania oceny kształtu otrzymanej krzywej lub powierzchni. Ocena ta jest
podstawą do zaakceptowania badanej powierzchni lub konieczności wprowadzania poprawek.
Najprostsza metoda poprzez przedstawienie realnego obrazu z użyciem ustalonego
oświetlenia, symulująca określone własności optyczne powierzchni, często jest metodą
niewystarczającą.

Ocena kształtu powierzchni obejmuje trzy podstawowe elementy: rozkład krzywizny na
powierzchni, obecność nieciągłości płaszczyzny stycznej lub krzywizny na połączeniach
płatów oraz utrzymanie tolerancji odtworzenia teoretycznego kształtu (ten ostatni stosowany
jest przeważnie w przypadku mechanizmów, więc w niniejszej pracy nie będzie opisywany).
Obrazowanie kształtu powierzchni można dokonać dwoma podstawowymi sposobami.
Pierwszy polega na określeniu funkcji kształtu na powierzchni i przedstawieniu tej funkcji za
pomocą kolorów. Jeśli odwzorowanie wartości funkcji na kolory (paleta) jest ciągłe, to
otrzymany obraz uwidacznia nieciągłość funkcji kształtu. W przypadku gdy paleta jest
nieciągła, otrzymany obraz uwidacznia warstwice tej funkcji. Drugi sposób wizualizacji
opiera się na narysowaniu tzw. krzywych charakterystycznych leżących na powierzchni.
Krzywymi tymi mogą być warstwice, linie najszybszego spadku itp.
Właściwie dobrane narzędzie wizualizacji uwypukla w obrazie negatywne i
niepożądane cechy kształtu badanej powierzchni. Jednak interpretacja takich obrazów bywa
trudna i wymaga od projektanta dużego doświadczenia i wprawy, aby podjąć właściwą
decyzję o modyfikacji powierzchni tak, aby jej skutek był zadawalający.
Poniżej opisane są pokrótce podstawowe metody oceny powierzchni stosowane w
praktyce.
Metoda oświetlania powierzchni
Metoda oceny powierzchni przez oświetlanie (ang. shading lub rendering) polega na
zastosowaniu punktowego źródła światła skierowanego na sprawdzaną powierzchnię. Funkcja
kształtu w tym przypadku przypisuje punktom powierzchni różne odcienie danej barwy w taki
sposób, że najjaśniejszy odcień mają punkty, których wektor normalny tworzy z kierunkiem
linii światła kąt zbliżony do zera. Im większy jest ten kąt, tym ciemniejsza barwa jest
przypisywana przez funkcję kształtu. Obserwacja oświetlonej w ten sposób powierzchni, z
jednoczesnym jej wolnym obrotem, pozwala ocenić zmiany odcieni barw. Charakter tych
zmian wskazuje na jakość powierzchni pod względem płynności, w szczególności pozwala
wykryć nieciągłości styczności i krzywizny.
Rys. Ocena powierzchni przez oświetlenie (shading)

Metoda izofot
Pewnego rodzaju rozwinięciem pierwszej metody jest przedstawienie na powierzchni
tzw. izofot. Izofoty są to warstwice intensywności odbitego światła (warstwice funkcji
kształtu). Takie warstwice dają użyteczną informację o kształcie powierzchni także na jej
nieoświetlonych częściach. Uwidaczniają one w sposób zdecydowanie bardziej wyraźny
nieciągłości krzywizny na połączeniach płatów. Na wspomnianą nieciągłość wskazują
nieciągłości kierunku stycznej do izofot.
Rys. Rozkład izofot na powierzchni błotnika
Metoda krzywych konturowych (sylwetkowych)
Krzywe konturowe są to krzywe leżące na badanej powierzchni, stanowiące granicę
między jej częścią widoczną i niewidoczną z określonego kierunku patrzenia. Są one
szczególnym rodzajem izofot. Tworząc linie konturowe na powierzchni nie tylko z zadanego
kierunku patrzenia, ale również pod zadanymi kątami od tego kierunku (np. co kilka stopni),
otrzymuje się rodzinę krzywych, a wzajemne relacje pomiędzy nimi pozwalają wykryć nawet
najmniejsze zaburzenia kształtu powierzchni.
Metoda krzywych przekrojowych
Gęsta siatka przekrojów danej powierzchni równoodległymi i równoległymi
płaszczyznami pozwala również ocenić jakość powierzchni, choć jest ona mniej dokładna niż
metoda poprzednia. Tu również ocenia się relacje pomiędzy krzywymi przekrojowymi.
Czasami wykorzystuje się płaszczyzny nierównoległe, np. mogą być to płaszczyzny normalne
do zadanej krzywej (przy badaniu uwypuklenia przy łuku błotnika tworzy się pęk płaszczyzn,
których wspólną częścią jest oś koła).
Rys. Krzywe przekrojowe wykonane na podstawie równoległych płaszczyzn

Metoda linii odblasku
Linia odblasku to obraz powstający przez odbicie zwierciadlane na powierzchni
określonej linii w przestrzeni. Linie odblasku mogą być zależne od obserwatora lub
niezależne. Linie odblasku niezależne od obserwatora są rzutem zadanej linii na powierzchnię
o kierunku normalnym do danej powierzchni. Podobnie jak izofoty, linie odblasku lepiej niż
krzywe przekrojowe uwidaczniają nieciągłości kształtu. Załamanie takiej linii świadczy o
nieciągłości krzywizny powierzchni.
Rys. Rozkład linii odblasku na przykładowej powierzchni
Powierzchnie klasy A nadwozi samochodów
Do budowania powierzchni zewnętrznych nadwozia samochodu wymagane jest
stosowane wyłącznie powierzchni o najwyższej klasie jakości, tzw. powierzchni klasy A.
Poszycie zewnętrzne samochodu stanowi jedną z form kształtujących otaczające nas
środowisko, a więc musi być estetyczne. Powszechnie stosowana zasada mówi, że wszystkie
powierzchnie widoczne w samochodzie powinny być klasy A. Jednak tak wysoka jakość
powierzchni nie jest konieczna w przypadku wnętrza pojazdu, gdzie końcowy wyrób
przyjmuje postać powierzchni matowego tworzywa sztucznego. Inaczej sytuacja wygląda na
powierzchniach poszycia zewnętrznego, które dodatkowo lakierowane jest wysoko
połyskującym lakierem. Refleksy świetlne powodują, że nawet niewielka wada powierzchni
jest widoczna gołym okiem i z pewnością nie wygląda estetycznie.
Wymagania stawiane powierzchniom klasy A
Pojęcie powierzchni klasy A jest ściśle związane z powstaniem komputerowych technik
generowania powierzchni nadwozia, w związku z tym wymagania stawiane tym
powierzchniom odnoszą się bezpośrednio do technik ich tworzenia w systemach CAD. Do

kryteriów, jakie musi spełniać powierzchnia, aby móc być uważaną za powierzchnię klasy A,
należą:
• brak segmentacji płatów (jeden płat – jeden segment) – jednosegmentowe płaty
jest znacznie łatwiej kontrolować i modyfikować;
• jak najniższa liczba punktów kontrolnych - płaty nie powinny przekraczać liczby
punktów kontrolnych 6x6; taki rząd płata pozwala na uzyskanie ciągłości
krzywizny z obu stron, tzn. pomiędzy dwoma innymi płatami;
• siatkowa struktura rozkładu punktów kontrolnych – rozkład punktów
kontrolnych powierzchni jest ściśle związany z przebiegiem krzywizny na
płacie, a więc im bardziej regularny jest rozkład, tym bardziej gładka i ciągła jest
krzywizna;
• harmonijny rozkład punktów kontrolnych – pozycja punktów kontrolnych
powinna być opisana przez funkcję wypukłą lub wklęsłą; odnosi się to do
obydwu kierunków, tzn. do wierszy i kolumn siatki kontrolnej;
• gładki przebieg krzywizny – rozkład krzywizny wzdłuż powierzchni powinien
być tak gładki, jak to tylko możliwe;
Rys. Prawidłowy rozkład siatki kontrolnej płata powierzchni maski
W połączeniach płatów nie wynikających w połączeń technologicznych bądź zadanych
zmian powierzchni, wymagane jest zachowanie ciągłości co najmniej C2, a więc zachowanie
ciągłości krzywizny. Krzywizna powinna mieć gładki przebieg wzdłuż całego danego
elementu i gwałtowne jej zmiany, jeśli nie są zaprojektowane przez stylistę, nie mogą mieć
miejsca.
Izofoty nadwozia nie powinny mieć nagłych i niezamierzonych zafalowań i powinny
mieć tak gładki przebieg, jak to tylko możliwe.
Linie refleksów powinny być odzwierciedleniem refleksów na nadwoziu z rysunków
perspektywicznych wykonanych przez stylistę (szkiców i rysunków renderingowych).

Linie przekrojowe nie powinny mieć punktów przegięcia wewnątrz płatów, a rozkład
krzywizny wzdłuż tych linii powinien być bez załamań.
Podczas projektowania należy zwracać szczególną uwagę na symetrię pojazdu
(płaszczyznę symetrii) tak, aby rozkład krzywizny na liniach przekrojowych płaszczyznami
pionowymi prostopadłymi do płaszczyzny symetrii był bardzo gładki na całej powierzchni,
która tworzy jedną całość z jej odbiciem symetrycznym (np. maska, dach, pokrywa
bagażnika).
Generowanie powierzchni na przykładzie Syreny Sport II /Sławomir
Kreft/
Tworzenie, opracowywanie oraz badanie powierzchni nadwozia współczesnego
samochodu opiera się dzisiaj głównie na metodzie komputerowej. Jak wspomniano w
rozdziale o geometrii powierzchni nadwozi, metoda komputerowa polega na bezpośrednim
tworzeniu powierzchni w wirtualnej przestrzeni trójwymiarowej. W tym celu wykorzystuje
się sprzęt komputerowy o dużej mocy przeliczeniowej oraz odpowiednie oprogramowanie.
Mimo że typowym programem stosowanym do tego celu w większości koncernów
motoryzacyjnych jest Alias, generowanie powierzchni nadwozia będącego tematem niniejszej
pracy odbyło się z użyciem programu Catia V5. Powodem był brak dostępności
oprogramowania firmy Alias Wavefront w Polsce. Catia jest jednak również profesjonalnym
programem wykorzystywanym bardzo szeroko podczas projektowania nadwozi. Różnica
polega na tym, iż jest ona znacznie bardziej sparametryzowana. Tak wysoka parametryzacja
nie jest wymagana w przypadku pierwszego generowania powierzchni, nie daje bowiem aż
tak dużej swobody w ich kształtowaniu. Zaletą jest jedynie fakt, iż powierzchnie opracowane
w programie Catia charakteryzują się znacznie wyższą jakością, przede wszystkim połączeń
pomiędzy płatami. Poza tym do celów produkcyjnych i technologicznych powierzchnie
wygenerowane w programie Alias nie są wystarczające i wymagają późniejszego
dopracowania w oprogramowaniu właśnie bardziej parametrycznym. Koncerny
motoryzacyjne najczęściej wykorzystują w tym celu program IceMSurf, ale również Catia V5,
najnowszy produkt firmy Dessault Systems, daje takie możliwości i w najbliższej przyszłości
może wyprzeć inne programy do generowania powierzchni.
Do celów tworzenia komputerowego modelu trójwymiarowego powierzchni poszycia
zewnętrznego korzystano z oprogramowania Catia V5R10 oraz Catia V5R11. Używano
modułów powierzchniowych Generative Shape Design, Free Style oraz Sketch Tracer.

Większość prac opierała się na wykorzystaniu modułu Free Style, gdyż tylko on pozwala na
generację powierzchni klasy A, jak również ich zaawansowane badanie. Moduł Generative
Shape Design posiada więcej opcji tworzenia powierzchni i dlatego czasami odwoływano się
do niego, jednak powierzchnie utworzone jego narzędziami były zawsze następnie
aproksymowane w module Free Style. Specyficzne wykorzystanie modułu Sketch Tracer
zostanie opisane w dalszej części tego rozdziału.
Prace nad generowaniem powierzchni rozpoczęto od ręcznego naszkicowania ze
stosunkowo dużą dokładnością rysunków przedstawiających główne linie nadwozia w widoku
z boku, z przodu, z tyłu oraz z góry. Szkice te pokazane są na rys. 1.
Rys. 1. Szkice do generowania powierzchni w systemie Catia
Rysunki te zostały następnie przetworzone na formę cyfrową (skanowanie) oraz
wykorzystane poprzez moduł Sketch Tracer do generowania głównych linii, na podstawie
których zostały następnie rozpięte powierzchnie poszycia. Zabieg ten jest konieczny,
ponieważ praktycznie niemożliwe jest odtworzenie na monitorze komputera kształtu
nadwozia zadanego przez stylistę bez podkładu w postaci takich rysunków. Chodzi przede
wszystkim o zachowanie właściwych proporcji, które mają decydujące znaczenie w
wyglądzie samochodu. Świadczy to o tym, jak ważna w zawodzie stylisty jest umiejętność
rysowania takich rzutów, gdyż te rysunki mają największy wpływ na wygląd przestrzennego
modelu komputerowego, który jest przecież tą właściwą dokumentacją dla danego nadwozia.
Rys. 2. przedstawia możliwości modułu Sketch Tracer oraz sposób, w jaki umieszcza
się powyższe szkice w przestrzeni trójwymiarowej, dając tym samym oparcie dla
generowania właściwych pod względem stylistycznym powierzchni. Poszczególne szkice
można było wzajemnie przemieszczać, tzn. do przodu/do tyłu lub do góry/do dołu tak, aby np.

linie w widoku z przodu dostosować na bieżąco do odpowiedniej płaszczyzny, na której w
rzeczywistości leżą.
Rys. 2. Sposób rozmieszczenia zdigitalizowanych szkiców w module Sketch Tracer
Zastosowanie podkładu w postaci ręcznie naszkicowanych rzutów znacznie ułatwiło
żmudny proces tworzenia powierzchni. Zadany z góry przebieg krzywych nie wymaga często
błędnego podejmowania decyzji, czy narysowana linia jest zgodna z ręcznymi rysunkami
stylisty, czy też nie. Nie jest to proste nawet wówczas, gdy sam stylista tworzy ze swojej
koncepcji model wirtualny. Generowanie krzywych opierających się na szkicach było więc
kolejnym etapem. Krzywe generowane w module Free Style są krzywymi Béziera, jeśli
tworzy się je poprzez podawanie punktów kontrolnych i liczba tych punktów nie przekracza
7. W wyniku kreślenia krzywych poprzez podawanie punktów, przez które ma ona
przechodzić, bądź gdy liczba podanych punktów kontrolnych przekracza 7, otrzymujemy
krzywą typu NURBS. Kontrolowanie kształtu krzywych opiera się na przesuwaniu punktów
kontrolnych wzdłuż zadanego kierunku bądź po płaszczyźnie.
Podstawowym zadaniem projektanta odpowiedzialnego za komputerowy model
przestrzenny jest odpowiednie wcześniejsze rozplanowanie kolejności tworzenia powierzchni.
Ważne jest również zadecydowanie, które powierzchnie powstaną przez wycięcie fragmentu z
większego płata, które natomiast będą rozpinane bezpośrednio na wizualnych krzywych
poszycia zewnętrznego. Etap ten jest niezwykle istotny, gdyż odpowiednie zaplanowanie
postępowania znacznie ułatwia i przede wszystkim skraca późniejszą pracę, jak również
pozwala uzyskać efekt znacznie bardziej zbliżony do pożądanego. Taka decyzja wymaga

jednak dużego doświadczenia od projektanta, a przede wszystkim znajomości zasad i podstaw
tworzenia powierzchni opisanych w poprzednim rozdziale.
Tworzenie tzw. modelu drutowego (ang. wireframe model) czyli generowanie głównych
krzywych nadwozia, jest we współczesnych technikach procesem praktycznie zanikającym.
Bardzo często widoczne na nadwoziu linie uzyskuje się poprzez przecinanie się różnych
płatów powierzchni, które wcześniej zostały wygenerowane na podstawie zupełnie innych
krzywych. Potwierdza to poniższy rysunek (rys. 3), na którym widoczne są główne krzywe
generujące niektórych powierzchni oraz wprowadzone jedynie pomocniczo linie zarysu
bocznego poszycia projektowanego auta. Model drutowy ma niewiele wspólnego z
końcowym efektem w postaci gotowego modelu przestrzennego. Opieranie się na wyżej
wspomnianych szkicach rzutów (przede wszystkim na rzucie bocznym) trwa praktycznie aż
do końca procesu.
Rys. 3. Niektóre krzywe generujące powierzchni Syreny Sport II
Tworzenie modelu rozpoczęto od płatów tworzących powierzchnie szyb. Zgodnie z
założeniem technologicznym były to powierzchnie prostokreślne, co można zauważyć na
podstawie liczby punktów kontrolnych w jednym z kierunków (rys. 4). Płat boczny na
rysunku jest już po aproksymacji i nie posiada więcej punktów kontrolnych niż 6 ani w
wierszach ani w kolumnach. Płat górny został aproksymowany w końcowej fazie.
Rys. 4. Powierzchnie szyb
Następnie wygenerowano główną powierzchnię maski (rys.5) oraz błotników przednich
(rys.6). Ponieważ w praktyce nie stosuje się powierzchni trójkątnych podczas budowania

poszycia w systemie CAD (istnieją trójkątne płaty Béziera, jednak nie są stosowane w
programach CAD), uzyskanie płata o trzech krawędziach (zakończenie błotnika) było
możliwe jedynie poprzez zbudowanie powierzchni czterobrzegowej i następne jej obcięcie
właściwą krzywą. W rozpatrywanym przypadku krzywą tą było przecięcie powierzchni
błotnika z powierzchnią maski. Otrzymanie właściwego przecięcia było niezwykle żmudnym
i czasochłonnym procesem, krzywa ta bowiem nie może falować bez względu na kierunek
obserwacji. Udało się uzyskać pożądany efekt przy stosunkowo poprawnym uporządkowaniu
punktów kontrolnych błotnika. Należy zaznaczyć, że kształt błotników o stosunkowo dużej
krzywiźnie w pionowym przekroju poprzecznym (wypukłe, zaznaczone błotniki w stylu
retro) jest znacznie trudniejszy do uzyskania w porównaniu z klasyczną formą współczesnego
samochodu.
Rys. 5. Punkty kontrolne głównego płata maski
Rys. 6. Dwa płaty błotnika przedniego w przecięciu z
powierzchnią maski
Powierzchnia boczna samochodu powinna stanowić jeden duży płat o jak najmniej
licznej siatce kontrolnej. Unika się wtedy widoczny zafalowań powierzchni odznaczających
się zniekształcaniem odbijanego obrazu. Na rys. 7 płat ten zaznaczony jest na kolor
pomarańczowy. Uzyskanie płynnego przejścia pomiędzy powierzchnią boczną oraz
powierzchnią zderzaka tylnego odbyło się za pomocą dwóch płatów przejściowych.
Nieznaczne przekroczenie dopuszczalnej liczby punktów kontrolnych 6x6 było konieczne do
otrzymania połączenia o zerowej odchyłce ciągłości C0 (stykowej), ale również i klasy C1 i
C2. Na przykładzie powierzchni przejściowej (kolor żółty na rys. 7) można łatwo zrozumieć,
dlaczego płaty z siatką 6x6 są najczęściej stosowane. Tylko wtedy możliwe jest uzyskanie
styczności o klasie C2 z płatami sąsiadującymi, przy jednoczesnym zachowaniu minimalnej
swobody w kształtowaniu tego płata.

Rys. 7. Powierzchnia boczna i jej przejście w tylny zderzak
Wspomniane wyżej trudności z komputerowym kształtowaniem typu błotników, jaki
zakładał projekt stylistyczny Syreny Sport II, wykazały się podczas próby wygenerowania
płatów tylnego błotnika. Tutaj dodatkową trudność sprawiało wymaganie odpowiedniej linii
przenikania się tych płatów z powierzchnią szyb bocznych. Tworzenie płatów należało tak
zorganizować, aby żaden z nich nie odznaczał się zmianą krzywizny na przeciwną wewnątrz
niego. Zmiana ta mogła być realizowana jedynie na łączeniach płatów. Na rys. 8 pokazano
wynik jednej z pierwszych prób. Mimo że połączenia płatów charakteryzowały się jakością
połączenia klasy C2 (styczność krzywiznowa), to jednak siatki kontrolne płatów nie były ani
spójne ze sobą, ani harmonicznie uporządkowane. Takie ułożenie jest niedopuszczalne w
przypadku powierzchni klasy A, co można było również zauważyć na ocenie tej powierzchni
przez oświetlenie. Cechowała się ona nierównościami widocznymi przy większych
zbliżeniach. Rys. 9 pokazuje rozwiązany problem poprzez utworzenie dodatkowej
powierzchni (kolor beżowy) odpowiedni obciętej, gdzie zdecydowano się zrobić
charakterystyczne przetłoczenie. Pozwoliło to uniknąć dodatkowych więzów dla płatów
błotnika w postaci styczności krzywiznowej do dodatkowej powierzchni. Uzyskane siatki
kontrolne płatów błotnika tworzą stosunkowo uporządkowany schemat z ciągłością wierszy i
kolumn. Również jakość powierzchni obserwowana podczas oświetlania wykazała znaczną
wyższość nad poprzednią.
Rys. 8. Niedopuszczalny w przypadku powierzchni klasy
A układ siatek kontrolnych błotnika tylnego Rys. 9. Stosunkowo dobre uporządkowanie siatek
kontrolnych

Odpowiednie wykończenie tylnej części uzyskano przez przemyślane wzajemne
przecinanie się generowanych powierzchni.
Płat stanowiący zanikającą kontynuację przetłoczenia przedniego błotnika można było
uzyskać tylko przez utworzenie go z ostatecznych krzywych ograniczających (nie przez
obcinanie większego płata) oraz przez zapewnienie odpowiednich przełączeń. Widoczna na
rys. 10 próba nie przynosiła pożądanych efektów. Oprócz nieharmonicznego rozkładu
punktów siatki, niemożliwe było uzyskanie nawet połączenia klasy C0 z główną boczną
powierzchnią. Dlatego zadecydowano o zmianie kształtu płata, który był za bardzo zbliżony
do trójkątnego. Zmieniło to nieco charakter przetłoczenia, pozostał on jednak zgodny z
ogólnym zamierzeniem stylizacyjnym. Płat pokazany na rys. 11 umożliwił uzyskanie
odpowiedniego skutku.
Rys. 10. Nieuporządkowanie siatki spowodowane
nadaniem odpowiednich klas połączeniom
Rys. 11. Rozwiązanie przez nadanie płatowi
postaci bardziej zbliżonej do płata prostokątnego
Rys. 12. Nieestetycznie wyglądająca falująca dolna linia bocznych okien
Kolejnym problemem okazało się uzyskanie odpowiedniej linii przecięcia powierzchni
szyby bocznej z powierzchnią znajdującą się poniżej jej. Efektem pojawiającym się bez
względu na różne kształtowanie punktów kontrolnych, było charakterystyczne zafalowanie
linii przenikania (rys. 12 – linia czerwona). Wynikało to z krzywizny szyby bocznej oraz jej
pochylenia. Problem ten udało się rozwiązać w końcowej fazie projektowania w Catii.
Po wykończeniu przedniej części i jej przejścia w boczną (na podobnej zasadzie jak w
przypadku tylnej), wygenerowano powierzchnie progów oraz dolne partie zderzaków (rys. 13

– kolor żółty). Styczność wzdłuż długości samochodu nie była konieczna w miejscach, gdzie
pojawią się wycięcia na nadkola.
Rys. 13. Główne powierzchnie Syreny w końcowej fazie tworzenia
W następnej kolejności zajęto się tworzeniem powierzchni zewnętrznych nadkoli,
stanowiących wymagane zasłonięcie kół, a jednocześnie dających specyficzne refleksy
świetlne. Ponieważ wymaga to wygenerowania kilku małych płatów (rys. 14 i 15), które
muszą spełniać wszystkie warunki dotyczące połączeń między nimi, jak również i z płatami
sąsiadującymi, był to proces długotrwały.
Rys. 14. Płaty tylnego i przedniego nadkola w połączeniu z płatami je otaczającymi
Ostatnim etapem było wygenerowanie powierzchni łuków dachu, jak również
przemieszczenie właściwych powierzchni szyb bocznych w głąb poszycia (tzw. offset) oraz
wykończenie detali.
Końcowy efekt, jak również badania jakościowe oraz modyfikacje zostały opisane w
rozdziale o badaniu powierzchni poszycia zewnętrznego Syreny Sport II.
Wykończenie powierzchni pod względem technologicznym wymaga jeszcze
wprowadzenia niewielkich promieni zaokrągleń na ostrych kantach. Etap ten w niniejszym
projekcie został pominięty ze względu na jego czasochłonność. Jest jednak sprawą oczywistą,
że wykonanie przejścia o zerowym promieniu w przypadku technologii laminatu jest możliwe
z punktu widzenia czysto technologicznego, ale w praktyce powstają w tych miejscach nie
wypełnione całkowicie żelkotem, co objawia się późniejszym odpryskiwaniem kawałków
znajdujących się bezpośrednio na brzegu.

Badanie powierzchni
Podczas generowania płatów powierzchni poszycia zewnętrznego projektowanego
samochodu, zwracano szczególną uwagę na jakość tworzonych powierzchni oraz jakość
połączeń. Każdy utworzony na podstawie wewnętrznej funkcji Catii płat był bezpośrednio
aproksymowany jednosegmentowym płatem o stosunkowo uporządkowanej siatce kontrolnej,
nie przekraczającej sześć punktów kontrolnych w wierszach i sześć w kolumnach. W
niektórych przypadkach, gdzie powierzchnia miała bardziej swobodny kształt, dopuszczano
nieznaczne przekroczenie zadanej granicy liczby punktów kontrolnych. Unikano w ten sposób
tworzenia zamiast jednego dwóch płatów, których połączenie ze stycznością C2
powodowałoby otrzymanie niepożądanego kształtu.
Płaty były również na bieżąco łączone z wymaganą stycznością krzywiznową, a w
przypadku gdzie stylizacja nakazywała wykonać przetłoczenie, łączenie było jedynie klasy
C0. Dostępne narzędzia w programie Catia pozwalały badać jakość połączenia płatów
zarówno pod względem styczności klasy C0, jak i C1 oraz C2. Tam gdzie było to możliwe,
starano się zachowywać odchyłkę krzywizny bliską 0%, aczkolwiek czasami dopuszczenie tej
odchyłki na poziomie do 20% dawało już zadawalające efekty podczas oceny na podstawie
jednopunktowego źródła światła (shading).
Po wykonaniu całego trójwymiarowego modelu komputerowego poszycia zewnętrznego
Syreny, sprawdzono dokładnie połączenie stykowe (styczność C0) wszystkich powierzchni.
W niektórych punktach występowały odchyłki rzędu 0,002mm (tak wysoka jest dokładność
Catii), które można było naprawić dostępnymi narzędziami bez konieczności budowania
nowych powierzchni. Należy tutaj zauważyć, że parametryzacja programu Catia czasami
znacznie przewyższa wymagania techniczne, jednak sprawdzenie to było konieczne ze
względu na możliwość występowania trudności z późniejszą pracą z tymi powierzchniami i
ich obróbką w systemie Catia.
W następnym kroku przystąpiono do zaawansowanego badania wygenerowanych
powierzchni pod względem spełniania wymagań dotyczących powierzchni klasy A. Poniżej
przedstawione są wyniki tych badań z podziałem na poszczególne metody.
W pierwszej kolejności poddano ogólnej ocenie całość powierzchni poszycia
zewnętrznego, a następnie przystąpiono do dokładnego badania poszczególnych fragmentów,
dlatego że zaawansowane badanie wymaga drobiazgowego analizowania połączeń płatów, jak
również ich krzywizn itp.

Ogólne badanie powierzchni
Oświetlanie punktowym źródłem światła jest podstawowym narzędziem do oceny
powierzchni w systemie Catia i z funkcji tej korzysta się praktycznie przez cały czas pracy w
modułach powierzchniowych. Jest to najprostszy i dający wystarczające możliwości sposób,
nie wymaga on bowiem od projektanta zaawansowanej znajomości praw rządzących
powierzchniami, jako że jest intuicyjny.
Jakość wygenerowanych powierzchni tworzących całość poszycia zewnętrznego
projektowanego samochodu została oceniona na podstawie funkcji shading jako
wystarczająca. Obserwacja poszczególnych płatów, jak również ich połączeń, nie wykazała
żadnych niepożądanych zafalowań bądź nieciągłości pomiędzy płatami. Całość tworzyła
zwartą bryłę z gładkimi przejściami we wszystkich miejscach, które tego wymagają.
Rys. Oświetlone powierzchnie modelu w systemie Catia – widok z przodu
Rys. Oświetlone powierzchnie modelu – widok z tyłu
System Catia dysponuje też typowym narzędziem do badania powierzchni samochodów,
które na badanych powierzchniach generuje refleksy świetlne powodowane przez liniowe
źródła światła (ang. AutomotiveClassA Highlights). Jest to odzwierciedleniem rzeczywistych

refleksów powodowanych przez wzdłużne świetlówki i pozwala wykryć podstawowe błędy,
jak również poddać ogólnej ocenie wygląd nadwozia w warunkach rzeczywistych.
Rys. Powierzchnie Syreny w świetle o źródłach liniowych (ACA Highlights)
Badanie powierzchni przedniej maski
Ponieważ przednia maska samochodu jest jednym z elementów, które są najbardziej
widocznej w bryle nadwozia, a jednocześnie jest jedną z nielicznych powierzchni, na której
refleksy świetlne i ich zmiany są doskonale widoczne z poziomu oczu człowieka, płatom
tworzącym powierzchnię tej części stawia się najwyższe wymagania co do jakości i jest ona
pierwszym elementem, który podlega ocenie.
Oświetlenie powierzchni maski przez liniowe źródła światła (ACA Highlights) wykazało
niewielkie zafalowania na przedniej części maski, które nie były zamierzone. Nieprawidłowy
płat powierzchni zachowuje styczność krzywiznową w połączeniach z otaczającymi go
płatami, jednak nadanie mu tej styczności podczas jego tworzenia, spowodowało niewielkie
jego zniekształcenie, które jest niedopuszczalne w przypadku powierzchni klasy A.
Rzeczywisty efekt refleksów świetlnych nie będzie w tym przypadku estetyczny, gdyż
zniekształcenie to sprawia wrażenie występowania niewielkich zagłębień, które będzie
potęgowane przez pokrycie połyskującym lakierem.

Rys. Refleksy świetlówek na masce – widoczne zafalowania na fragmencie przed wlotem powietrza
Obserwacja odbicia siatkowego źródła światła pozwala ocenić jakość powierzchni w
obydwu kierunkach (wzdłużnym i poprzecznym). Pozwala to na lepszą ocenę powierzchni o
krzywiznach w dwóch kierunkach, które to powierzchnie są szeroko stosowane na poszycia
zewnętrzne pojazdów. Na niżej zamieszczonym rysunku widać powierzchnię maski poddaną
takiej ocenie. Widać, że zafalowanie powierzchni może być nieprzyjemne dla oka. Natomiast
pozostałe fragmenty maski nie wykazują żadnych błędów.
Rys. Refleksy siatkowego źródła światła na masce
Badanie fragmentu metodą izofot potwierdza niegładki przebieg krzywizny w przedniej
części maski. Jednocześnie można zauważyć, że zafalowanie występuje tylko w jednym
kierunku – poprzecznym (wzdłuż osi Y).

Rys. Rozkład izofot na masce w kierunku poprzecznym i wzdłużnym
ają zbliżony charakter.
Jedynie wspomniany wyżej fragment wymaga dopracowania.
Ciągłość lini odblasku (ang. Reflect Lines) na masce, niezależnie od badanego kierunku,
świadczy o poprawnym wykonaniu połączeń poszczególnych płatów. Połączenia są klasy C2.
Względne położenie linii refleksów jest również poprawne, linie m
Rys. Linie refleksów na masce wzdłuż różnych kierunków
etody i potwierdza wniosek
napisany w części teoretycznej rozdziału o badaniu powierzchni.
Zastosowanie metody krzywych przekrojowych nie wykazuje żadnych błędów. Ocena
charakteru krzywych, jak również ich wzajemnych relacji jest taka, jaka być powinna, zgodna
z pierwszymi szkicami stylistycznymi, na których naniesiono część linii przekrojowych.
Jednocześnie trudno jest dostrzec niepoprawność stwierdzoną na podstawie wyżej
analizowanych metod. Świadczy to o mniejszej przydatności tej m
Rys. Linie przekrojowe na masce nie wykazujące żadnych niepoprawności
ie. Daje to
możliwość badania nawet powierzchni o niewielkich krzywiznach.
Na wybranych liniach przekrojowych zbadano przebieg krzywizny wzdłuż tych linii.
Jest to analiza najdokładniejsza, pozwalająca wychwycić nawet najmniejsze nieciągłości,
gdyż amplitudę wykresu krzywizny można ustawić na dowolnym poziom

Na poniższym rysunku pokazany jest przebieg krzywizny na części maski bliższej
przedniej szybie. Z punktu widzenia powierzchni klasy A, jest to przebieg niemalże idealny,
ponieważ nie występują tu nieciągłości ani nawet drobne zafalowania w okolicach
płaszczyzny symetrii samochodu. Gwałtowny wzrost krzywizny również nie wykazuje
żadnych nieciągłości, przejścia są płynne.
Rys. Poprawny rozkład krzywizny w górnej części maski
Badanie krzywizny wzdłuż przekroju przez płaty kontrowersyjne, wykazało całkowicie
niewłaściwy jej przebieg. Zarówno nieciągłość na połączeniach płatów, jak i w punkcie
symetrii pojazdu świadczy o tym, iż funkcja oceniająca połączenia w Catii, z której
korzystano podczas generowania powierzchni, nie jest wystarczająca w przypadku
powierzchni klasy A. Wymagają one koniecznie dodatkowego badania zaawansowanymi,
wyżej opisanymi funkcjami.
Rys. Niewłaściwy rozkład krzywizny w dolnej części maski

Przebieg krzywizny wzdłuż przekroju płaszczyzną symetrii jest zgodny z założeniami
stylistycznymi i nie wymaga poprawek. Płaty o większych powierzchniach charakteryzują się
spokojnym i gładkim narastaniem bądź maleniem krzywizny.
Rys. Przebieg krzywizny wzdłuż symetrii maski
Po przeanalizowaniu jakości powierzchni maski przystąpiono do próby jej
dopracowania w celu eliminacji wyżej zauważonych wad. Poprawa dotyczyła dwóch płatów,
które charakteryzowały się niewielką nieregularnością i niegładkością.
Próba korekcji tylko jednego płata nie przynosiła efektów, ponieważ, jak się później
okazało, przyczyną błędu nie był sam płat, ale raczej płat sąsiadujący, którego punkty
kontrolne w okolicach połączenia z wyżej wspomnianym płatem wymagały niewielkich
modyfikacji, aby łatwiej i bardziej poprawnie można było poprowadzić nową powierzchnię,
która będzie styczna w krzywiźnie do tego płata, a jednocześnie styczna krzywiznowo w
symetrii pojazdu. Zadanie nie było łatwe, ponieważ niewielkie przesunięcie jednego punktu
kontrolnego powoduje niewspółmiernie większe zmiany w jakości powierzchni, co objawia
się zmianami w refleksach liniowych źródeł światła. Jednocześnie tak dokładne i precyzyjne
zmiany wymagają od projektanta doświadczenia w tej dziedzinie, ponieważ należy zdawać
sobie sprawę z tego, czy dany punkt kontrolny przesunąć w górę czy w dół, bądź też po
liniach siatki kontrolnej lub prostopadle do nich. Praca ta jest niezwykle czasochłonna.
Poprawę powierzchni udało się osiągnąć, korygując nieco przebieg punktów
kontrolnych przy zachowaniu ich uporządkowania płata sąsiadującego. Również
zmodyfikowano nieco przebieg krzywych prowadzących płata stykającego się z płaszczyzną
symetrii. Efekt, jaki się udało osiągnąć przedstawiony jest poniżej.
Refleksy od liniowych źródeł światła nie tworzą już zafalowań, jednak powierzchnia
wciąż nie ma takiej samej krzywizny na całej szerokości. Uzyskany efekt można mimo
wszystko uznać za zadowalający, ponieważ refleksy nie uwidaczniają wady, a jedynie zmianę
charakteru powierzchni, co można uznać za kontynuację przetłoczenia występującego w
górnej części maski. Widać to przede wszystkim na rysunku przedstawiającym refleksy od

siatkowego źródła światła. Jak w poprzednim przypadku, brak jest jakichkolwiek nieciągłości
linii refleksów.
Rys. Refleksy na powierzchni maski po korekcji
Badanie charakteru izofot na skorygowanych płatach potwierdza poprawność
wykonania modyfikacji. Izofoty praktycznie nie wykazują żadnych zafalowań, mimo że
powinny w większym stopniu uwidaczniać niepożądane zmiany krzywizny. Na rysunku dla
porównania przedstawione są izofoty na powierzchniach przed korekcją.
Rys. Izofoty na powierzchniach maski przed i po korekcji
Również linie refleksów nie wykazują poważniejszych błędów. Niewielkie
zakrzywienie linii w okolicach łączenia płatów nie stanowi podstawy do eliminacji tej
powierzchni na nadwozie, ponieważ linie te nie tworzą zafalowań tak, jak to miało miejsce
poprzednio. Dopiero falowanie linii świadczy o występowaniu charakterystycznych zagłębień
na powierzchniach, które w rzeczywistości wyglądają podobnie jak lekko wgnieciona blacha.

Rys. Linie refleksów na masce przed i po korekcji
Przebieg krzywizny na przekroju poprzecznych wzdłuż korygowanych płatów wykazuje
znaczną poprawę w stosunku do tego sprzed poprawy. Wykres nie ma już postaci fali, w
okolicach symetrii pojazdu jest nawet bardzo dobry. Zmiany krzywizny na łączeniach płatów
są przyczyną powyższych spostrzeżeń.
Rys. Przebieg krzywizny po modyfikacji
Ogólnie można podsumować, że płaty zostały poprawione z wynikiem pozytywnym.
Precyzyjniejsze dopracowanie wymagałoby spędzenia wielu godzin, ponieważ, żeby
wyeliminować błąd całkowicie, należałoby wygenerować praktycznie wszystkie
powierzchnie maski od nowa. Powiązania powierzchni są na tyle duże, że zmiana jednej z
nich pociąga za sobą kolejne.
Badanie powierzchni przedniego błotnika
Zaokrąglone błotniki w stylu retro z punktu widzenia generowania ich w systemie
CAD, nie są prostym do wykonania elementem. Bardzo trudno jest zachować ciągłość i
gładki przebieg krzywizny. Dodatkowo, ze względu na stosunkowo duże wartości krzywizn,
są one elementem który wymaga od projektanta dużej uwagi i poświęcenia mu wielu godzin
pracy. W niniejszej pracy udało się uzyskać zamierzony efekt, ale ocena tych powierzchni
również nie jest łatwa i jednoznaczna, jak w przypadku powierzchni o niewielkich
wartościach krzywizn.

Na poniższym rysunku przedstawiono fragment przedniego błotnika złożony z płatów
powierzchni, które zdecydowano się poddać ocenie. Na podstawie opcji shading, po bardziej
wnikliwej analizie, można już zauważyć mały fragment, który wymaga większego
dopracowania. Warunki styczności krzywiznowej są zachowane, jednak kształt płata nie
odpowiada założeniom, a ponieważ jest on stosunkowo mały, uwidacznia się poprzez
miejscowe nieznaczne uwypuklenie.
Rys. Powierzchnie błotnika zobrazowane przez funkcję shading
Oświetlenie błotnika równoległymi liniowymi źródłami światła nie wykazuje żadnych
nieciągłości wzdłuż długości samochodu, co jest niezwykle ważne w przypadku tego rodzaju
błotników. Przebieg linii jest gładki i zgodny z zasadami estetyki. Głębszej analizy wymaga
natomiast fragment tworzący uwypuklenie nadkola, szczególnie w okolicy przedniego
światła.
Rys. Fragment błotnika z refleksami świetlówek – ogólna ocena poprawna poza zaznaczonym fragmentem
Na poniższych dwóch rysunkach przedstawiony jest wymagający dokładniejszej oceny
fragment z włączoną funkcją ACA Highlights. Ocena odbijanego obrazu liniowego źródła
światła wykazuje pewne nieciągłości na niewielkim fragmencie. Siatkowe źródło pokazuje, że
rozkład obrazów siatki na uwypukleniu łuku nadkola nie jest równomierny, ani nawet nie

zmienia się w sposób ciągły. Oprócz tego małego fragmentu, powierzchnie tworzą optymalny
odbijany obraz.
Rys. Odbicie liniowego i siatkowego źródła światła na przedniej części błotnika
Fragment przedniego błotnika z jego izofotami przedstawia poniższy rysunek.
Równomierny ich rozkład na górnej części świadczy o poprawnym ukształtowaniu
tworzących ją powierzchni. Widoczny w dolnej części ciemny fragment nie podlega analizie,
ponieważ jest to jedynie efekt powodowany przez funkcję programu. Natomiast wyraźnie jest
widać nieprawidłowy i niepożądany przebieg izofot w miejscu wykrytym już w poprzedniej
metodzie. Zaznaczony on jest na rysunku czerwonym prostokątem, a na kolejnym rysunku
przedstawiony w powiększeniu.
Rys. Izofoty na analizowanym fragmencie przedniego błotnika z zaznaczeniem nieprawidłowego fragmentu

Rys. Rozkład izofot na nieprawidłowo ukształtowanym fragmencie Linie odblasku na górnej części tworzą krzywe bez żadnych nieciągłości, a obraz na
powierzchni całkowicie odpowiada założeniom . Tak bowiem powinny się układać obrazy
linii prostych w przestrzeni na powierzchniach ukształtowanych w błotniki samochodu z
niewielkimi uwypukleniami łuku koła na nadkola. W tym przypadku uwypuklenie to ciągnie
się aż do końca drzwi, zanikając na długości, w związku z czym rozkład linii odblasku jest jak
gdyby bardziej rozciągnięty.
Rys. Rozkład linii odblasku błotnika podobny do refleksów na rysunkach renderingowych
Natomiast wyraźne zafalowania i brak gładkości linii odblasku na wyróżnionym
wcześniej fragmencie są w przypadku powierzchni klasy A niedopuszczalne.
Rys. Zafalowanie linii odblasku na małym fragmencie
Podobnie jak w przypadku badania maski samochodu, tak i w przypadku błotnika
poprzez utworzenie na jego powierzchniach krzywych przekrojowych, nie do końca można
wykryć wadę, która zauważalna była nawet przez niewprawne oko podczas badania
powyższymi metodami. Krzywe przekrojowe pokazują jedynie, że charakter powierzchni
zaprojektowany przez stylistę został w sposób jak najwierniejszy odtworzony.

Rys. Nie wskazujący na błędy rozkład krzywych przekrojowych na błotniku
Rozkład krzywizny wzdłuż przekroju płaszczyzną przechodzącą przez oś koła powinien
wyglądać tak, jak na rysunku poniżej. Krzywizna w tych przekrojach jest stosunkowo duża i
trudno oceniać jakość powierzchni na jej podstawie. Jedynie brak nieciągłości, oczywiście
poza zmianą krzywizny na przeciwną, może świadczyć o braku poważniejszych błędów.
Rys. Przebiegi krzywizn w przekrojach płaszczyznami przechodzącymi przez oś koła
Widoczny po prawej stronie rysunku przebieg ma podobny charakter, jak ten po lewej.
Nieciągłość występująca w okolicach światła jest zamierzona, gdyż jest to przejście o
styczności C0. Wobec powyższego na podstawie tego przekroju nie da się potwierdzić wady
pojawiającej się w tym miejscu podczas badania poprzednimi metodami. Dopiero wykonanie
przekroju przez wadliwy płat płaszczyzną pionową wyraźnie odzwierciedla nieciągłość
krzywizny, a nawet jej zmianę na przeciwną (zafalowanie powierzchni). Pokazane jest to na
poniższym rysunku.
Rys. Zmiana krzywizny świadcząca o niepożądanym zafalowaniu powierzchni
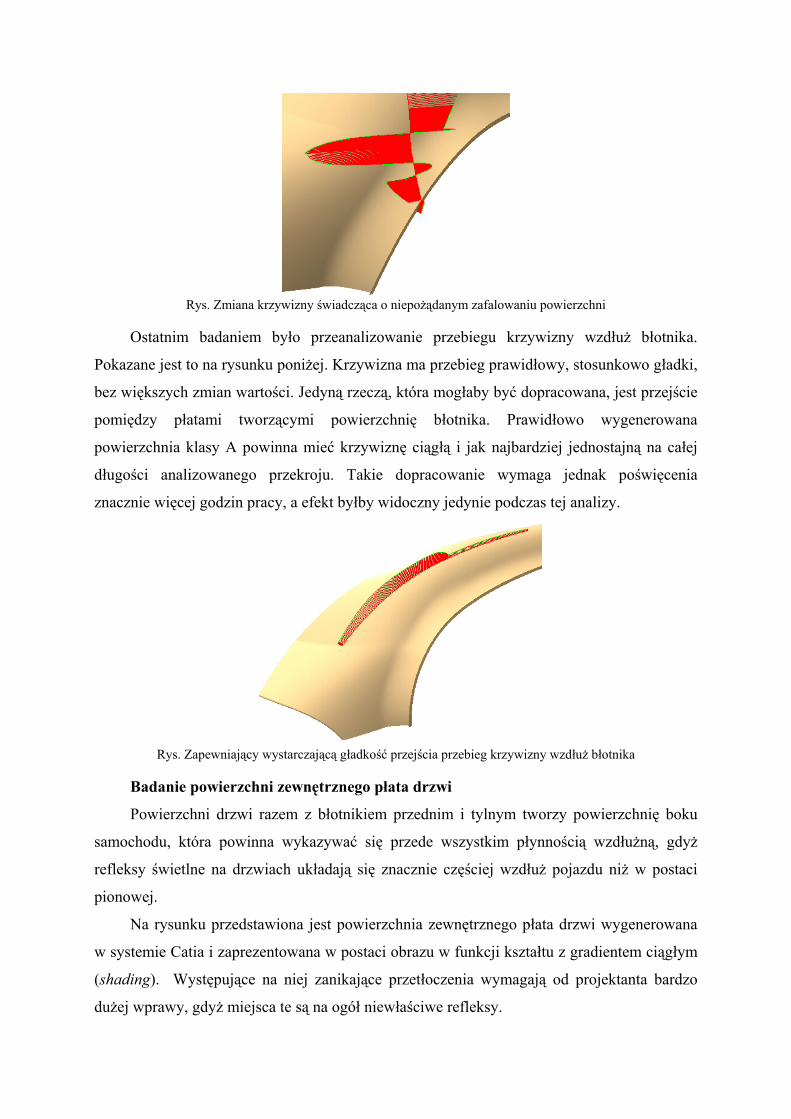
Ostatnim badaniem było przeanalizowanie przebiegu krzywizny wzdłuż błotnika.
Pokazane jest to na rysunku poniżej. Krzywizna ma przebieg prawidłowy, stosunkowo gładki,
bez większych zmian wartości. Jedyną rzeczą, która mogłaby być dopracowana, jest przejście
pomiędzy płatami tworzącymi powierzchnię błotnika. Prawidłowo wygenerowana
powierzchnia klasy A powinna mieć krzywiznę ciągłą i jak najbardziej jednostajną na całej
długości analizowanego przekroju. Takie dopracowanie wymaga jednak poświęcenia
znacznie więcej godzin pracy, a efekt byłby widoczny jedynie podczas tej analizy.
Rys. Zapewniający wystarczającą gładkość przejścia przebieg krzywizny wzdłuż błotnika
Badanie powierzchni zewnętrznego płata drzwi
Powierzchni drzwi razem z błotnikiem przednim i tylnym tworzy powierzchnię boku
samochodu, która powinna wykazywać się przede wszystkim płynnością wzdłużną, gdyż
refleksy świetlne na drzwiach układają się znacznie częściej wzdłuż pojazdu niż w postaci
pionowej.
Na rysunku przedstawiona jest powierzchnia zewnętrznego płata drzwi wygenerowana
w systemie Catia i zaprezentowana w postaci obrazu w funkcji kształtu z gradientem ciągłym
(shading). Występujące na niej zanikające przetłoczenia wymagają od projektanta bardzo
dużej wprawy, gdyż miejsca te są na ogół niewłaściwe refleksy.

Rys. Obraz zewnętrznego płata drzwi w funkcji kształtu z ciągłym gradientem
Refleksy świetlne odbijające liniowe wzdłużne źródła światła (ACA Highlights) dają
spodziewany, poprawny obraz. Linie układają się zgodnie z charakterem powierzchni, a
zafalowania występują jedynie w miejscach przetłoczeń. Niewielka nieciągłość pojawiająca
się niejako na przedłużeniu przetłoczenia będącego kontynuacją łuku nadkola, jest również
efektem zamierzonym, gdyż przetłoczenie to zanika dopiero na końcu drzwi. Odwzorowuje to
całkowicie stylizację samochodu (patrz pierwsze szkice i rysunki renderingowe).
Rys. Refleksy świetlne na powierzchniach płata zewnętrznego
Przedstawiony na powyższych rysunkach obraz może wydawać się zbyt
skomplikowany, należy jednak wziąć pod uwagę, że przetłoczenia na płatach drzwiowych są
kontynuacją przetłoczeń zaczynających się już na przedniej części samochodu, a całość
tworzy bardzo zwartą i lekką bryłę.
Analiza linii odblasków również wykazuje zadowalającą jakość płatów. Nieciągłości lub
zafalowania linii nie występują, a w przypadku pionowych linii odblasku można zauważyć, że
zarówno powierzchnia poniżej dolnego przetłoczenia, jak i powyżej tworzą razem jedną
powierzchnię, całość jest więc bardzo spójna i ostatecznie nieskomplikowana w wyglądzie.

Rys. Pionowe i poziome linie odblasku na płacie drzwiowym
Krzywe przekrojowe na płacie drzwiowym wskazują na właściwe odwzorowanie
kształtu zadanego przez stylistę, jak również potwierdzają prawidłowe wygenerowanie
powierzchni. Przetłoczenia zanikają równomiernie i łagodnie.
Rys. Krzywe przekrojowe wykazujące zanikający charakter przetłoczeń
Badanie powierzchni tylnego błotnika
Analiza powierzchni tylnego błotnika powinna być podobna do tej odnoszącej się do
przedniego błotnika. Badaniu podlega zazwyczaj górna część (głównie ze względu na
refleksy świetlne) oraz jakość wykonania uwypuklenia łuku nadkola.
Część podlegająca ocenie przedstawiona jest za pomocą metody oświetlania na
poniższym rysunku.

Rys. Badany fragment przedstawiony za pomocą funkcji shading Tak jak w poprzednich przypadkach, i tutaj refleksy od liniowych źródeł światła (ACA
Highlights) pozwalają wykryć najbardziej widoczne błędy. Górna powierzchnia, mimo że
składa się z kilku płatów, nie wykazuje żadnych nieciągłości, przebieg linii jest prawidłowy.
Natomiast omawiana metoda doskonale wychwytuje nieciągłość przy przejściu wybrzuszenia
poszerzającego nadkole we właściwą powierzchnię boku. Nie należy jej mylić z nieciągłością
linii wynikającą w występującego tam przetłoczenia, gdzie styczność klasy C0 została nadana
tam celowo.
Rys. Refleksy na powierzchni błotnika tylnego
Sam charakter powierzchni wybrzuszenia jest prawidłowy, co widać na następnym
zdjęciu, gdzie świetlówki zostały ustawione w taki sposób, aby w miarę równomiernie
refleksy układały się badanej powierzchni.
Rys. Refleksy na wybrzuszeniu poszerzającym nadkole
Izofoty na badanej powierzchni wykazują brak ciągłości krzywiznowej nie tylko na
przejściu omawianego wybrzuszenia w powierzchnię boku, ale również niewielkie
nieciągłości na przetłoczeniu nad nadkolem. To jest jednak wąski element stanowiący
niewielką powierzchnię, i nieciągłości tam występujące mogą zostać pominięte.

Rys. Izofoty z innego punktu widzenia
Rys. Powiększenie na przejście wybrzuszenia w powierzchnię boku
Linie odblasku tworzą w miejscu nieciągłości stosunkowo dużą przerwę. Potwierdza się
fakt, że dokładność i skuteczność tej metody jest bardzo wysoka w porównaniu z innymi. Do
górnej części błotnika nie można mieć żadnych zastrzeżeń.
Rys. Obraz równoległych linii w przestrzeni na powierzchniach błotnika
Krzywe przekrojowe nie wykazują żadnych większych wad powierzchni, ale
dokładniejsza i bardziej szczegółowa ich analiza może wykazać niestały charakter
przetłoczenia nad nadkolem. Spowodowane to było trudnościami z utworzeniem stosunkowo
gładkiej powierzchni, która trzymałaby zerową wartość odchyłek od połączenia stykowego.
Nadanie styczności rzędu C1 powodowało zerwanie spójności na innych granicach omawianej
powierzchni.
Należy zauważyć, że metoda ta nie wykrywa nieciągłości przejścia, które było widoczne
wyraźnie w poprzednich metodach.

Rys. Krzywe przekrojowe układające się równomiernie na powierzchni błotnika
Badanie powierzchni pokrywy bagażnika
Tylna pokrywa bagażnika, podobnie jak i przednia maska, stanowi powierzchnię
poszycia zewnętrznego, której jakości stawia się najwyższe wymagania, gdyż jest ona
powierzchnią leżącą (poziomą). Musi mięć wobec tego jak najmniejszą ilość punktów
kontrolnych, aby była maksymalnie „napięta”.
Powierzchnia tylnej klapy jest stosunkowo prosta, wobec tego jej badanie nie jest
skomplikowane, ale jest konieczne. Powierzchnie oświetlone jedno- lub dwupunktowym, jak
na rysunku poniżej, źródłem światła, nie wykazują żadnych błędów i styczność krzywiznowa
powinna być zachowana.
Rys. Powierzchnie pokrywy bagażnika oświetlone dwupunktowym źródłem światła
Refleksy liniowych źródeł światła są ciągłe i układają się w uporządkowany sposób.
Widać to na rysunku zamieszczonym poniżej. Brak jest nawet najmniejszych zakłóceń.
Rys. Równoległy rozkład refleksów na pokrywie bagażnika

Również izofoty oraz linie odblasku nie wykazują żadnych nieciągłości, ich przebieg
jest odpowiednio gładki.
Rys. Uporządkowany rozkład gładkich izofot świadczące o poprawności powierzchni
Rys. Linie odblasku bez nieciągłości na tylnej klapie
Mimo wszystko dopiero analiza krzywizny wykazała niewielką niepoprawność. Na
niżej zamieszczonym rysunku widać przebieg krzywizny wzdłuż jednego z poprzecznych
przekrojów górnej części tylnej pokrywy. W okolicach symetrii wzdłużnej samochodu,
krzywizna zmienia nawet wartość na przeciwną. Poprzednie metody nie wykazały tej wady ze
względu na fakt, iż nieciągłość krzywizny jest bardzo mała. Na rozkładzie jest to widoczne w
sposób wyraźny dlatego, że amplituda krzywizny została znacznie zwiększona w celu
lepszego uwidocznienia błędu.
Rys. Rozkład krzywizny na górnej części klapy – widoczna zmiana wartości krzywizny na przeciwną

Powyższej wady nie posiada dolna, pionowa część pokrywy bagażnika. Rozkład
krzywizny przechodzi płynnie przez płaszczyznę symetrii samochodu. Pewną nieciągłość
krzywizny daje się natomiast zauważyć przy łączeniu płatów. Ten przypadek świadczy o
niedopracowaniu narzędzia w programie Catia, gdyż małe płaty znajdujące się po bokach
powstały na podstawie ekstrapolacji powierzchni głównej.
Rys. Rozkład krzywizny na dolnej części pokrywy –
gładkie przejście w symetrii i nieciągłość na obrzeżach