why is it harder to run on an inclined exercise treadmill?
TRANSCRIPT
Why Is It Harder to Run on an Inclined Exercise Treadmill?Carla M.A.P.F. Nave and Luis J.M. Amoreira
Citation: The Physics Teacher 52, 241 (2014); doi: 10.1119/1.4868943 View online: http://dx.doi.org/10.1119/1.4868943 View Table of Contents: http://scitation.aip.org/content/aapt/journal/tpt/52/4?ver=pdfcov Published by the American Association of Physics Teachers Articles you may be interested in A remarkable vector addition exercise Phys. Teach. 49, 517 (2011); 10.1119/1.3651740 Damped oscillations and equilibrium in a mass-spring system subject to sliding friction forces: Integratingexperimental and theoretical analyses Am. J. Phys. 78, 1120 (2010); 10.1119/1.3471936 Choose Wisely: Static or Kinetic Friction—The Power of Dimensionless Plots Phys. Teach. 47, 158 (2009); 10.1119/1.3081298 A Free-Form Power Experiment to Enhance Student Creativity Phys. Teach. 46, 36 (2008); 10.1119/1.2823998 Reverse-Engineering the Solution of a “Simple” Physics Problem: Why Learning Physics Is Harder Than ItLooks Phys. Teach. 44, 293 (2006); 10.1119/1.2195401
This article is copyrighted as indicated in the article. Reuse of AAPT content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
69.198.152.210 On: Sat, 05 Apr 2014 04:10:26
DOI: 10.1119/1.4868943 The Physics Teacher ◆ Vol. 52, April 2014 241
F = mg sin q, (2)
pointing upward. Its reaction, R, is a force with equal inten-sity (pointing downward) that the body applies on the tread-mill’s belt. Since the treadmill’s belt is moving with speed v (relative to the laboratory), this force does work at a rate
P = mgv sin θ. (3)
This equation is similar to Eq. (1). Both equations express, in different inertial frames, the power needed to “work out” on a treadmill as a function of its angle. However, there is a nuance in interpretation. Whilst in Eq. (1) the work done by the moving body’s motor is converted into potential energy (in the frame of reference considered, the body is actually moving up), in Eq. (3) it is supplied to the treadmill’s belt, as-sisting its motor in maintaining the belt’s motion. Equation (3) states that as the treadmill’s angle increases, a growing fraction of the total power needed to keep it running at a given speed is supplied by the body moving over it; therefore, the remaining fraction, which is supplied by the treadmill’s motor, is correspondingly reduced.
Experimental verificationIf this reasoning is correct, we expect the power supplied
by the moving body’s motor to increase linearly (with slope mgv when plotted as a function of sin θ) as the treadmill’s angle grows, and that supplied by the treadmill’s motor to de-crease correspondingly (that is, with slope −mgv in the same plot).
To verify these tendencies, we designed a simple experi-ment where we investigated the energy consumption of the motors of a small-scale treadmill model (built using surplus parts from auto and computer repair workshops and pow-
Why Is It Harder to Run on an Inclined Exercise Treadmill?Carla M.A.P. F. Nave, Remote Sensing Unit of Universidade da Beira Interior, Covilhã, PortugalLuis J.M. Amoreira, Physics Department and Remote Sensing Unit of Universidade da Beira Interior, Covilhã, Portugal
It is a known fact that it takes a greater effort to run on an exercise treadmill when it is inclined with positive slope than when it is in a horizontal position. The reason seems
simple: walking on an inclined treadmill is somehow equiva-lent to walking up a hill with the same inclination; when we walk up a hill, our own weight does negative work (or, in other words, we gain potential energy as we ascend) and therefore we have to do more work to compensate for it (or, in other words, we must supply the potential energy increase).
This reasoning is made more convincing by adopting a frame of reference fixed to the surface of the treadmill’s mov-ing endless belt.1 In such an inertial frame, the person using the treadmill is actually ascending a slope, against the work done by his or her weight, and his or her potential energy is indeed increasing, at a rate easily shown to be given by (see any undergraduate physics textbook, for instance Ref. 2)
P = mgv sin θ, (1)
where m and v respectively denote the mass and the speed of the moving person, g the acceleration of gravity, and θ the angle of the treadmill’s surface.
However, going back to the laboratory frame of reference, one may argue that the height of the center of mass of the person using the treadmill (and, therefore, his or her poten-tial energy) remains constant on average, regardless of the treadmill’s inclination. Why, then, is it harder to exercise on a more inclined treadmill, using a frame of reference fixed in the laboratory?
The fact that there is a simple answer to this question in one particular frame of reference (the one fixed to the tread-mill’s moving surface) makes us believe that an equally simple explanation must also be possible in any other inertial frame, including the lab’s. However, we couldn’t find any, in pub-lished literature or elsewhere, other than some rather vague arguments considering finer details of human locomotion expressed in an online forum.3
SolutionConsider any self-powered moving body (like a person or
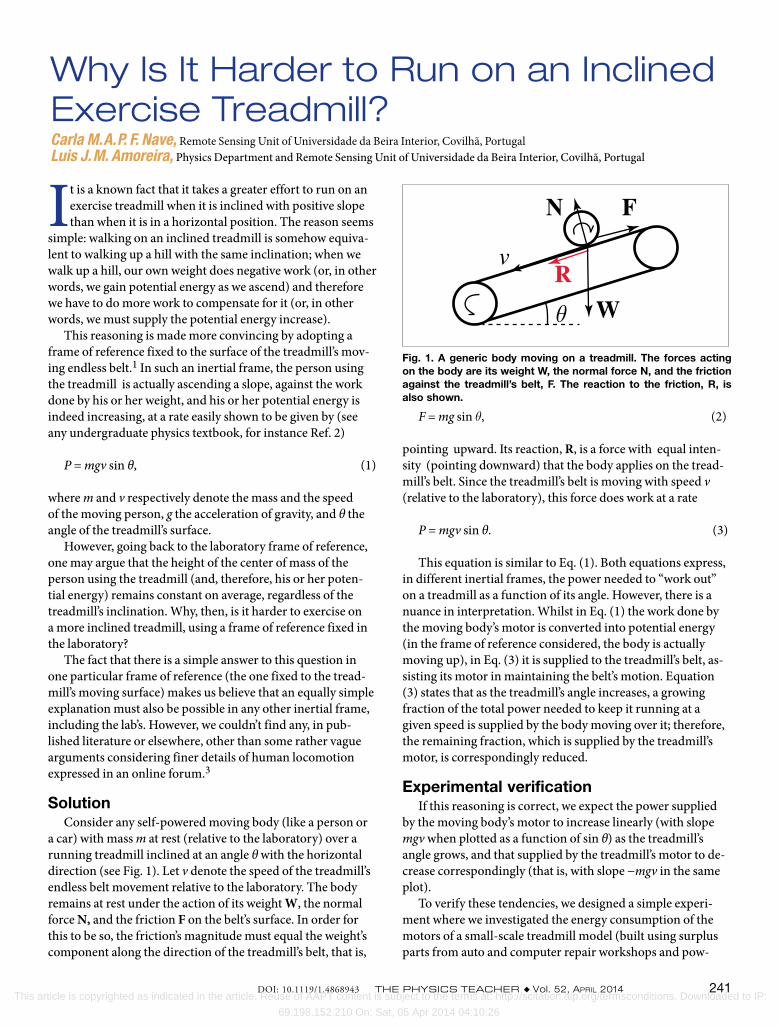
a car) with mass m at rest (relative to the laboratory) over a running treadmill inclined at an angle θ with the horizontal direction (see Fig. 1). Let v denote the speed of the treadmill’s endless belt movement relative to the laboratory. The body remains at rest under the action of its weight W, the normal force N, and the friction F on the belt’s surface. In order for this to be so, the friction’s magnitude must equal the weight’s component along the direction of the treadmill’s belt, that is,
v
N F
W
R
θ
Fig. 1. A generic body moving on a treadmill. The forces acting on the body are its weight W, the normal force N, and the friction against the treadmill’s belt, F. The reaction to the friction, R, is also shown.
This article is copyrighted as indicated in the article. Reuse of AAPT content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
69.198.152.210 On: Sat, 05 Apr 2014 04:10:26

242 The Physics Teacher ◆ Vol. 52, April 2014
Results and conclusion
The graph in Fig. 3 shows the results obtained using a car with mass 642.3 ± 0.1 g and treadmill’s motor running at 7.0 ± 0.5 rot/s (which amounts to a belt speed of 37 ± 3 cm/s, given that the belt drive radius in our apparatus was 0.85 ± 0.05 cm). Quantitatively, the results clearly do not agree with Eq. (3): the slopes of the best fitting lines to the two sets of data (13.4 ± 0.3 W for the car, −9 ± 4 W for the treadmill) are not symmetrical, and neither is equal (in absolute value) to the expected value of mgv . 2.3 W. However, note that Eq. (3) refers to the power supplied by the motors to the treadmill’s belt, not to the power supplied to the motors plotted in Fig. 3. Since the motors’ efficiencies are certainly not equal to 100%, the slopes of the best fitting lines in the plot should not equal the expected value (instead, they should be larger than that, which they are). Furthermore, the efficiencies of the two very different motors most likely have very different values, which may explain the fact that the two slopes are not symmetrical.
But qualitatively our simple experiment’s results clearly show that as the incline of the treadmill increases, the en-ergy used by its motor to keep the belt moving is reduced. Therefore, the body moving over the treadmill has to supply the missing fraction, and that’s why it is harder to run on an inclined treadmill.
References1. Wolfgang Rindler, Relativity– Special, General and Cosmologi-
cal (Oxford University Press, 2001).2. D. Halliday, R. Resnick, J. Walker, Principles of Physics, 9th
ed. (Wi ley, 2010).3. http: //www. physicsforurns.com/showthread.php?t=3194, ac-
cessed on July 30, 2013.
Remote Sensing Unit of Universidade da Beira Interior, Covilhã, Portugal; [email protected]
ered by a dc power drill) and of a small electric toy car mov-ing over it, as functions of the treadmill’s inclination (see Fig. 2). The purpose of the experiment was simply to display the decrease of the power consumed by the treadmill’s mo-tor with increasing inclination, not to verify the theoretical analysis accurately.
Both motors were powered by a dual dc power supply. The car was loaded with lead to make it more massive, in order to intensify the expected effect of the incline on the power consumed by the treadmill’s motor. This procedure was necessary because otherwise the small variations in the power consumed by the motors with varying inclination would hardly be perceptible in the rather high values of the treadmill’s motor data. We used a bicycle speedometer with the magnet strapped at the power drill’s axis to measure its angular velocity (the speedometer was calibrated setting its wheel circumference parameter equal to one), from which we could evaluate the belt’s speed. The speedometer’s readings were double checked using a stroboscopic lamp.
The power supplied to the two motors was evaluated mea-suring the electric currents flowing through them and the voltage drops at their terminals. However, electromagnetic induction at the coils of the running motors generates rapid and significant oscillations of the currents’ values, preventing proper readings on an ammeter. We circumvented this diffi-culty using a data acquisition system connected to a personal computer to sample and store the currents’ values (evaluated from the voltage drop at the terminals of resistors inserted at each circuit) at high frequency (kHz range, much higher than the frequency of the currents’ oscillations). From those mea-surements, we computed instantaneous values for the power consumed by each motor and took time averages of these values on 10-second runs. For each inclination considered, we repeated these 10-second runs four times, in order to esti-mate the uncertainty of the power time averages.
Fig. 2. Treadmill and car used in the experiment. The pic-ture also shows the stroboscopic lamp used to calibrate the bicycle speedometer, the dc power supply, and (over it) the data acquisition system used in the evaluation of the currents’ values.
Best fit slope: 13.4 ± 0.3 W
Best fit slope: -9 ± 4 W
Car
Treadmill
P (
W)
0.0
2.5
5.0
7.5
10.0
12.5
15.0
sinθ0.000 0.025 0.050 0.075 0.100 0.125
Fig. 3. Power supplied to the motors of the treadmill (higher on the graph) and of the car (lower), as functions of the inclination angle, for a treadmill speed of 37 ± 3 cm/s and a car with mass 642.3 ± 0.1 g. Similar results are obtained for other values of these two parameters. (The error bars on the car data are too small to be easily perceptible.)
This article is copyrighted as indicated in the article. Reuse of AAPT content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
69.198.152.210 On: Sat, 05 Apr 2014 04:10:26