synchronization of kuramoto oscillators with non-identical...
TRANSCRIPT

Synchronization of Kuramoto Oscillators with Non-identical NaturalFrequencies: a Quantum Dynamical Decoupling Approach
Zhifei Zhang, Alain Sarlette and Zhihao Ling
Abstract— This paper proposes a method to counter the driftassociated to unknown non-identical natural frequencies inthe Kuramoto model of coupled oscillators. Inspired by thequantum dynamical decoupling approach, it builds on a time-varying variant of the dynamics in order to effectively bringthe oscillator phases closer to the same value. For two agentsadmitting instantaneous position exchanges, we exactly computehow the relative phase converges to a stable periodic fixedpoint. This stable point tends to zero if the dynamics switchesfast enough, even in a situation with a large gap in naturalfrequencies with respect to the coupling strength. We showhow the same results can be obtained with continuous stateevolutions, using a dynamic controller; phase synchronizationis proved under the averaging approximation. We explicitlygeneralize the method to multiple oscillators with instantaneousstate exchanges, that can be implemented by cycling througha predefined sequence or randomly. Simulation results arepresented to validate the effectiveness of the algorithms.
I. INTRODUCTION
The Kuramoto model of coupled oscillators has attract-ed much interest in chemistry [1], biology [2], as wellas physics and engineering [3], [4]. In a typical controlapplication, it describes the interactions governing the planarheading of networked robotic systems, with the objectiveto achieve coordinated rotation through limited feedbackbetween neighboring robotic agents; other applications couldinvolve e.g. electronic oscillators. When each agent for somereason features a heterogeneous drift (‘natural frequency’)in addition to the feedback term, the coupling gain mustbe larger than some critical value [4], [5] to prevent theoscillators from deviating away. Furthermore, even if thecoupled oscillators do converge to a common frequency,the resulting constant phase differences between oscillatorsof different natural frequencies can significantly differ fromzero. In a control context, this spurs the introduction of somekind of integral control or other, in order to allow oscillatorswith arbitrary heterogeneous drifts to synchronize with smallphase differences, even under weak coupling strength. The
Zhifei Zhang and Zhihao Ling are with the Key Laboratoryof Advanced Control and Optimization for Chemical Processes,Ministry of Education, East China University of Science andTechnology, No.130, Meilong Road, Shanghai 200237, China.Zhifei Zhang and Alain Sarlette are with the SYSTeMS researchgroup, Faculty of Engineering and Architecture, Ghent University,Technologiepark Zwijnaarde 914, 9052 Zwijnaarde(Ghent), [email protected], [email protected],[email protected].
This paper presents research results of the Belgian Network DYSCO (Dy-namical Systems, Control, and Optimization), funded by the InteruniversityAttraction Poles Programme, initiated by the Belgian State, Science PolicyOffice. The first author’s visit to the SYSTeMS research group is supportedby a CSC scholarship, initiated by the China Scholarship Council.
present paper shows how the quantum dynamical decouplingapproach [6], designed to suppress time-independent butunknown drift in quantum system operators, can be appliedto this aim in the classical Kuramoto model.
The key point of quantum dynamical decoupling is toiterate unitary actions that do not commute with the time-independent drift Hamiltonian, which effectively averagesthe drift out in the overall evolution (at least to first orderin the time between iterations). For example, drift on asingle qubit — which is analogous to rotation on a sphere,called the Bloch sphere — can be removed by applyingrotations orthogonal to the drift direction; if the drift directionis unknown, then two decoupling directions must be con-catenated. There are two possible ways to implement theserotations. Bang-Bang decoupling [6] assumes instantaneouspulses of π rotation, which simplifies the computation of theresulting evolution. As a more explicit model of experimentalsettings, Eulerian decoupling [7] adds bounded Hamiltoniancontrols to the existing dynamics, designed such that inabsence of drift the system would evolve smoothly throughvarious states corresponding to Cayley graph vertices of aso-called “decoupling group” of transformations. When largedecoupling groups are needed, a random switching sequencecan be more effective than deterministic cycling [8]. This isinteresting for our distributed network application, where wecan thus advantageously dispose of a supervisor.
In the present paper, we show that quantum dynamicaldecoupling can be adapted to synchronize multiple het-erogeneous oscillators into a state with arbitrarily smallphase differences. We design both Bang-Bang and Euleriandecoupling strategies to synchronize two oscillators. For themulti-agent case, we consider both deterministic and randomBang-Bang decoupling and show their capacity to effectivelyaverage out drift, both in simulations and analytically un-der an averaging approximation. In future work, we willcombine the present results towards Eulerian decoupling formultiple agents. The open-loop control nature of quantumdynamical decoupling could be a practical advantage, insettings where the active controller is meant to correctdrifts in a network with existing Kuramoto-like coupling.Indeed, also in our non-quantum multi-agent adaptation, the“jump” actions required by Bang-Bang decoupling mightbe implementable without knowing the system states, byphysically exchanging e.g. subsystem connections to externalinfluences. Our adaptation of Eulerian decoupling howeverintroduces a new dynamical variable in the controller, whichmust be updated on basis of state measurements and remindsa kind of integral controller.

The structure of the paper is as follows. In Section II,we recall the notions of Kuramoto model and quantumdynamical decoupling method, and show how they can belinked. In section III, we present synchronization of twooscillators with Bang-Bang decoupling and Eulerian decou-pling. In section IV, Bang-Bang decoupling algorithms formulti-agent synchronization are analyzed and simulated, bothwith deterministic and random decoupling paths. We finallyconclude in section V.
II. GENERAL PRINCIPLE
A. Kuramoto Model
The Kuramoto model [1] describes a set of N oscillatorswhose phases attract each other according to:
θk = ωk +K
N
N∑j=1
sin(θj − θk) , k = 1, 2, ..., N , (1)
where K is the coupling strength and ωk denotes the naturalfrequency of oscillator k. Meanwhile variants have beenstudied where each oscillator k is not coupled to all others,but only to a subset Nk specified by some interconnectiongraph.
A solution θ∗(t) of (1) is said to be phase-locked orfrequency synchronized if and only if
θ∗j − θ∗k = 0 , ∀j, k = 1, ..., N . (2)
Oscillators are further said to be exactly synchronized orphase synchronized if they are phase-locked with equal value,θ∗j = θ∗k for all j, k = 1, ..., N . The critical condition indi-cates that oscillators can achieve frequency synchronizationonly if K ≥ Kcritical = maxj,k |ωj−ωk|/2, or equivalently
|κ| = 2K
|ωj − ωk|≥ 1 ∀j, k . (3)
If |κ| < 1, there is no relative equilibrium solution ( ddt (θk −θj) = 0 for all j, k) to (1) and the fast oscillator(s) willovertake the slow oscillator(s) repeatedly. However, evenwhen |κ| > 1 and the oscillators get phase-locked, this mighthappen with very different phase values. This is the standarddeviation from equilibrium necessary to compensate drifts insystems with proportional feedback. In applications wherethe actual goal is phase synchronization, this deviation canbe detrimental and dedicated control techniques should beadded to compensate the drift.
B. Dynamical Decoupling
A closed quantum system evolves as
d
dtx = −i(H0 +Hc)x , (4)
where x ∈ Cn is the wave function, and the hermitianmatrices H0 = H∗0 , Hc = H∗c ∈ Cn×n are the drift andcontrol Hamiltonians respectively. Here ∗ denotes complexconjugate transpose. Quantum Dynamical Decoupling (DD)is a method to design Hc in open loop in order to minimizethe effect of H0 on any state x [6]. It designs Hc such that,(i) for H0 = 0 the system would undergo a periodic motion
of “decoupling” period Tc, and (ii) the possible effects of anonzero H0 on the state at Tc, 2Tc, ... are averaged out overthis periodic motion.
Explicitly, let Uc(t) denote the propagator associated with(4) when H0 = 0. DD identifies a discrete group G = gj ⊂SU(n), j = 1, ..., |G| and a corresponding representationP (g) such that
1
|G|∑j
P (gj)∗H0P (gj) = λ I (5)
a multiple of the identity matrix, for all expected disturbancesH0. It then divides Tc into M |G| subintervals for someinteger M , and it implements controls Hc such that Uc(t) ∼gj over M subintervals for each j, with Uc(Tc) = I theidentity. This open-loop control rotates the effective impactof the drift H0, such that its associated drift propagator U(t)satisfies
ddtU(t) = −iH r
0(t) U(t) (6)
with H r0(t) = U∗c (t)H0 Uc(t). The effective Hamiltonian
Heff over Tc is defined as:
U(Tc) = e−iHeffTc = e−i[H0+H1+...]Tc , (7)
where the H0, H1, . . . are Magnus expansion terms of order1, 2, .... In particular,
H0 =1
Tc
∫ Tc
0
H r0(u) du . (8)
The general goal of DD is to get Heff as close as possible to amultiple of the identity matrix. Indeed this would mean thatthe effect of H0 at every t = Tc, 2Tc, ... is suppressed sinceU(t) = expiλt with λ ∈ R does not influence predictions inquantum dynamics [9]. Achieving this ideal Heff at the firstorder of the Magnus expansion (8) is directly linked to (5).
• Bang-Bang Decoupling (BBD) lets strong pulses in Hc
implement discrete jumps, such that Uc(t) = P (g`)for t ∈ [`∆, (` + 1)∆) for ` = 0, 1, ..., |G| − 1, soTc = |G|∆. The corresponding first-order effective errorHamiltonian H0 is exactly (5). In general the discreteUc(t) facilitate computation and hence design of thecorresponding Heff, but in practice they require verystrong control Hamiltonians.
• Eulerian Decoupling (ED) uses smooth control Hamil-tonians of lower amplitude, and thereby achievesUc(`∆) = P (gk), gk ∈ G only at discrete timesteps [7]. A symmetric canceling of H0 at all timescan then nevertheless be ensured by constructing thesequence f : (1, 2, ...,M |G|) → G : ` → gk asan Eulerian path through a Cayley graph constructedfrom M generators f1, ..., fM of G. Indeed, under thereasonable assumption that the transition associated toa given generator fα is each time implemented with thesame control profile Hα
c (t) of duration ∆, the resulting

first-order effective error Hamiltonian writes H0 =
1|G|M∆
∑gj∈G
P (gj)∗
(M∑α=1
∫ ∆
0
Uαc (s)∗H0Uαc (s) ds
)P (gj)
=1
|G|∑gj∈G
P (gj)∗H ′0 P (gj) . (9)
Both these methods aim at canceling H0, and hence areefficient for small Tc.
C. Dynamical Decoupling on Kuramoto
We can write the Kuramoto model in the complex plane:
d
dt[eiθ1 , · · · , eiθN ] = (H0 +HK) [ieiθ1 , · · · , ieiθN ] , (10)
where H0 = diag(ω1, ..., ωN ) and HK = diag(f1, ..., fN )with fk = K
|Nk|∑j∈Nk
sin(θj − θk). This highlights thesimilar dynamical structure. Remarkably, also the objectivesmatch, since a drift Hamiltonian proportional to the identitymatrix is perfectly transparent for phase synchronization inthe Kuramoto model.
A difference is that the state in (10) is restricted tox ∈ CN : |xk| = 1 for k = 1, ..., N, while quantumDD exploits the freedom to move in x ∈ CN : |x| =1. In this paper, we replace the effect of Hc by either(BBD) exchanging states or causes of natural frequenciesamong subsystems, or (EDD) adapting HK with a dynamiccontroller that adds the missing degrees of freedom to (10).Another novelty w.r.t. standard quantum DD is that we herehave to analyze the DD effect on HK , which we want tokeep. An important point is that HK is state-dependent,unlike H0, and hence it might be differently affected by thetime-varying decoupling dynamics.
III. TWO-AGENT SYNCHRONIZATION
While our ultimate goal is to work with multiple agents,we present as a preliminary step how to synchronize twooscillators under BBD and ED because this situation allowsa detailed analytic study.
For two oscillators, let θ = θ2 − θ1, ω = ω2 − ω1, theincremental dynamics can be derived as:
θ = −2K sin(θ) + ω. (11)
No equilibrium of θ exists for −1 < κ = (2K)/ω < 1.For |κ| > 1, there is a stable fixed point θ∗1 = arcsin(1/κ)with cos(θ∗1) > 0, and an associated unstable fixed pointθ∗2 = arcsin(1/κ) with cos(θ∗2) < 0. When |κ| tends to 1from above, these two fixed points converge towards π/2 —far from phase synchronization θ = 0.
For N = 2 in (10), decoupling is achieved with a two-elements group G = e, g, where P (e) is the identity matrixand P (g) = [0, 1; 1, 0]. This indeed generates effective driftsH0 = diag[ω1, ω2] and H1 = P (g)∗H0P (g) = diag[ω2, ω1],whose sum H0 is proportional to the identity.
A. Bang-Bang Decoupling
For BBD of two agents, instantaneous switches P (g) atk ∗ Tc/2, k = 1, 2, ... can be implemented by exchangingpositions or natural frequency(-inducing fields) of the two a-gents. For the sake of analysis, these situations are equivalentto changing the sign of relative phase:
θ(t+) = −θ(t−), t = Tc/2, Tc 3Tc/2, 2Tc, ... (12)
where θ(t−) and θ(t+) are respectively the states just beforeand just after a switch at t. Since BDD is a periodicoperation, we analyze the periodic equilibria of dynamics(10) and (12), solution of
θ∗(t+) = θ∗(t+ Tc+) . (13)
Proposition 1: The relative phase θ between N = 2oscillators with non-identical frequencies, evolving under(10), (12) and starting from any point on the circle, exceptone unstable periodic equilibrium, converges to
θ∗ = 2 arctan
(1
ω
(a
td−√
(a
td)2 + ω2
)), (14)
where a =√ω2 − (2K)2, td = tan(a · Tc/4) for 0 < |κ| ≤
1, and a =√
(2K)2 − ω2, td = tanh(a · Tc/4) for |κ| > 1.Proof: When 0 < |κ| ≤ 1, let a =
√ω2 − (2K)2, the
general solution of (11) isθ(t) = 2 arctan
(2K−a·tan(0.5a(C−t))
ω
), where C on initial
value θ(0). After variable change x = ω tan(θ/2), thisgeneral solution writes x(t) = 2K − a · tan(0.5a(C −t)) = 2K − a tan(aC/2)−tan(at/2)
1+tan(aC/2) tan(at/2) . Using this expressionover intervals (0, Tc/2) and (Tc/2, Tc), with a switch atthe end of each period, a few calculations yield x(Tc+) =C1 − C2
C3+x(0) = f(x(0)) with constants C3 < C1 < 0 <
C2 respectively defined by C1 = md − m−, C2 = m2d,
C3 = md − m+ where m− = 2K − a/ tan(aTc/4),m+ = 2K+a/ tan(aTc/4), md = −a2
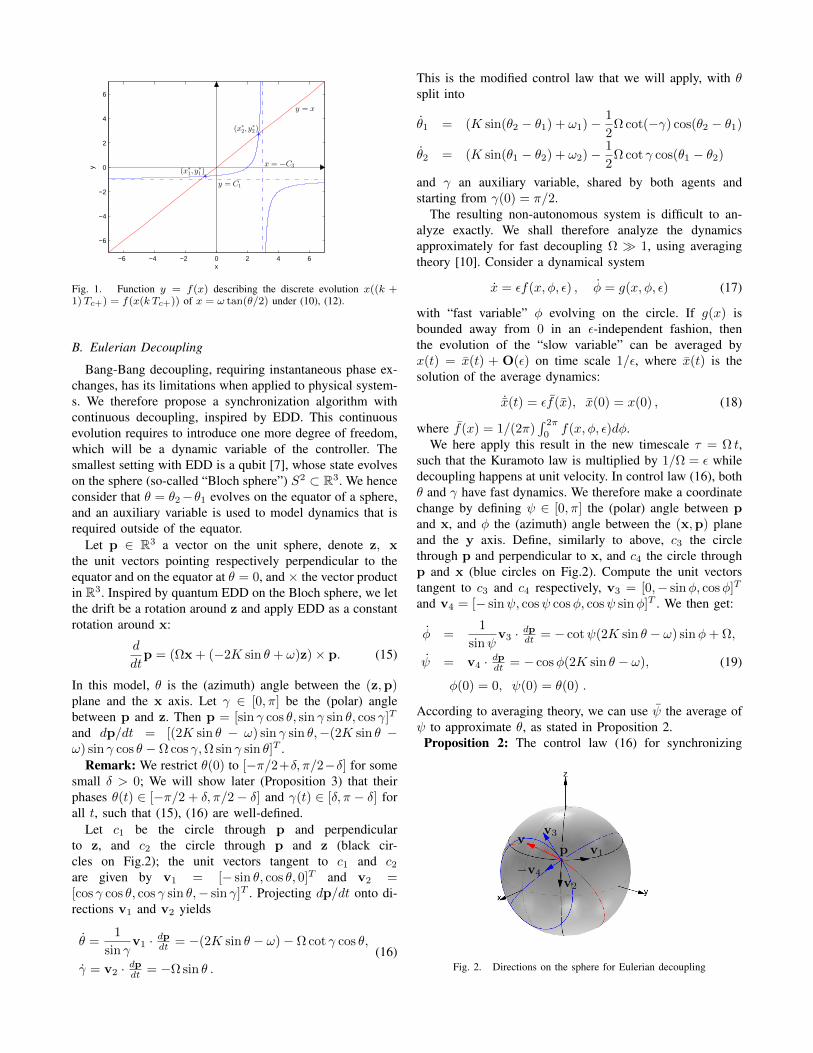
4K (1+1/ tan2(aTc/4)).Figure 1 illustrates the corresponding discrete-time map f(·).Since C3 < C1 < 0, the line y = x can only cross the upper-left curve of y = f(x). Therefore x((k+1)Tc) = f(x(kTc))
has two equilibria x∗1,2 = atd±√(
atd
)2
+ ω2. The negativeone x∗1 corresponds to (14) and it is locally stable since|f ′(x∗1)| < 1 (see Fig. 1); it directly attracts all pointsx ∈ (−∞, x∗2). Points above x = −C3 > 0 get mappedto negative values and then converge to x∗1, while points in(x∗2,−C3] get mapped to increasingly larger values until theyexceed −C3 and join the former evolution. In conclusion, allpoints except x∗2 converge to x∗1, as announced.
The calculations for |κ| > 1 are similar and therefore notdetailed here.
Remark: For fast swapping agents, that is Tc → 0, wehave the approximation x∗1 ≈ − 1
2td·ω2
a ≈ − 18Tcω
2 and θ∗1 =2 arctan( 1
ωx∗1) ≈ − 1
4Tcω. Thus faster switching drives thefinal relative phase closer to zero, and this independently ofK — in particular even for |κ| < 1. This reminds integralcontrol in linear systems, where the end equilibrium does notdepend on the proportional feedback strength.
−6 −4 −2 0 2 4 6
−6
−4
−2
0
2
4
6
x
y
(x∗1, y∗
1)
(x∗2, y∗
2)
y = x
x = −C3
y = C1
Fig. 1. Function y = f(x) describing the discrete evolution x((k +1)Tc+) = f(x(k Tc+)) of x = ω tan(θ/2) under (10), (12).
B. Eulerian Decoupling
Bang-Bang decoupling, requiring instantaneous phase ex-changes, has its limitations when applied to physical system-s. We therefore propose a synchronization algorithm withcontinuous decoupling, inspired by EDD. This continuousevolution requires to introduce one more degree of freedom,which will be a dynamic variable of the controller. Thesmallest setting with EDD is a qubit [7], whose state evolveson the sphere (so-called “Bloch sphere”) S2 ⊂ R3. We henceconsider that θ = θ2−θ1 evolves on the equator of a sphere,and an auxiliary variable is used to model dynamics that isrequired outside of the equator.
Let p ∈ R3 a vector on the unit sphere, denote z, xthe unit vectors pointing respectively perpendicular to theequator and on the equator at θ = 0, and × the vector productin R3. Inspired by quantum EDD on the Bloch sphere, we letthe drift be a rotation around z and apply EDD as a constantrotation around x:
d
dtp = (Ωx + (−2K sin θ + ω)z)× p. (15)
In this model, θ is the (azimuth) angle between the (z,p)plane and the x axis. Let γ ∈ [0, π] be the (polar) anglebetween p and z. Then p = [sin γ cos θ, sin γ sin θ, cos γ]T
and dp/dt = [(2K sin θ − ω) sin γ sin θ,−(2K sin θ −ω) sin γ cos θ − Ω cos γ,Ω sin γ sin θ]T .
Remark: We restrict θ(0) to [−π/2+δ, π/2−δ] for somesmall δ > 0; We will show later (Proposition 3) that theirphases θ(t) ∈ [−π/2 + δ, π/2− δ] and γ(t) ∈ [δ, π − δ] forall t, such that (15), (16) are well-defined.
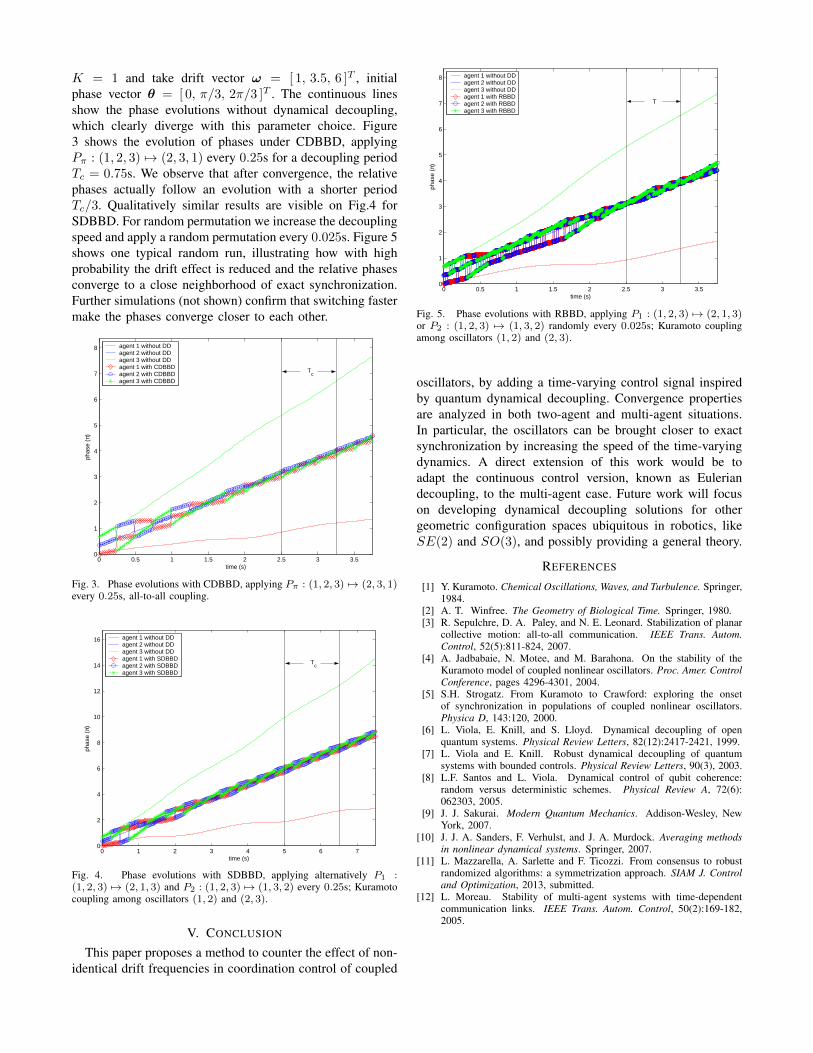
Let c1 be the circle through p and perpendicularto z, and c2 the circle through p and z (black cir-cles on Fig.2); the unit vectors tangent to c1 and c2are given by v1 = [− sin θ, cos θ, 0]T and v2 =[cos γ cos θ, cos γ sin θ,− sin γ]T . Projecting dp/dt onto di-rections v1 and v2 yields
θ =1
sin γv1 · dpdt = −(2K sin θ − ω)− Ω cot γ cos θ,
γ = v2 · dpdt = −Ω sin θ .
(16)
This is the modified control law that we will apply, with θsplit into
θ1 = (K sin(θ2 − θ1) + ω1)− 1
2Ω cot(−γ) cos(θ2 − θ1)
θ2 = (K sin(θ1 − θ2) + ω2)− 1
2Ω cot γ cos(θ1 − θ2)
and γ an auxiliary variable, shared by both agents andstarting from γ(0) = π/2.
The resulting non-autonomous system is difficult to an-alyze exactly. We shall therefore analyze the dynamicsapproximately for fast decoupling Ω 1, using averagingtheory [10]. Consider a dynamical system
x = εf(x, φ, ε) , φ = g(x, φ, ε) (17)
with “fast variable” φ evolving on the circle. If g(x) isbounded away from 0 in an ε-independent fashion, thenthe evolution of the “slow variable” can be averaged byx(t) = x(t) + O(ε) on time scale 1/ε, where x(t) is thesolution of the average dynamics:
˙x(t) = εf(x), x(0) = x(0) , (18)
where f(x) = 1/(2π)∫ 2π
0f(x, φ, ε)dφ.
We here apply this result in the new timescale τ = Ω t,such that the Kuramoto law is multiplied by 1/Ω = ε whiledecoupling happens at unit velocity. In control law (16), bothθ and γ have fast dynamics. We therefore make a coordinatechange by defining ψ ∈ [0, π] the (polar) angle between pand x, and φ the (azimuth) angle between the (x,p) planeand the y axis. Define, similarly to above, c3 the circlethrough p and perpendicular to x, and c4 the circle throughp and x (blue circles on Fig.2). Compute the unit vectorstangent to c3 and c4 respectively, v3 = [0,− sinφ, cosφ]T
and v4 = [− sinψ, cosψ cosφ, cosψ sinφ]T . We then get:
φ =1
sinψv3 · dpdt = − cotψ(2K sin θ − ω) sinφ+ Ω,
ψ = v4 · dpdt = − cosφ(2K sin θ − ω), (19)
φ(0) = 0, ψ(0) = θ(0) .
According to averaging theory, we can use ψ the average ofψ to approximate θ, as stated in Proposition 2.
Proposition 2: The control law (16) for synchronizing
vv1
v2
v3
−v4
p
Fig. 2. Directions on the sphere for Eulerian decoupling

two oscillators and countering drift, can be approximatedto accuracy O(1/Ω) by the average system:
˙ψ =4K
π
((
1
sin ψ− sin ψ)F (sin ψ)− 1
sin ψE(sin ψ)
),
(20)
where E(k) = π2
∑+∞n=0
[(2n)!
22n(n!)2
]2k2n
1−2n
and F (k) = π2
∑+∞n=0
[(2n)!
22n(n!)2
]2k2n.
Proof: Integrate (19) over φ.
Proposition 3: The function V = ψ2/2, ψ ∈ [0, π/2− δ]is a Lyapunov function proving convergence of (20) to ψ =0.Proof: We can simplify (20) to ˙ψ =
−∑+∞n=0
2K2n+2
[(2n)!
22n(n!)2
]2(sin ψ)2n+1. That means when
sin(ψ) > 0 we have ˙ψ < 0, hence V = ψ ˙ψ < 0. Only whenψ = 0 or π, we have ˙ψ = 0. The point ψ = π is unstable asa maximum of V , and ψ = 0 is stable as its minimum.
IV. MULTI-AGENT SYNCHRONIZATION
The extension to multiple oscillators involves a new issuebesides the selection of an appropriate decoupling group,namely how to implement the decoupling actions over thenetwork. In this section, we first present a strategy wherea supervisor would coordinate the decoupling actions, thena strategy with random pairwise permutations. We hereconsider Bang-Bang decoupling only, and leave for futurework an explicit adaptation of Eulerian decoupling withpossibly several auxiliary control variables.
A. Deterministic Bang-Bang decoupling
Suppose that there exists a closed path which pass-es through all nodes of the network and numberthe agents according to their order on this path.Then the cyclic permutation group generated by Pπ:Pπ[x1, x2, ..., xN ] = [x2, ..., xN , x1] is able to counterthe drift due to differing natural frequencies. Indeed, s-ince Pπ∗diag(ω1, ω2, ..., ωN )Pπ = diag(ω2, ..., ωN , ω1),applying N iterations of Pπ over Tc yields an effectivedrift 1
N
∑N−1k=0 P k∗π H0P
kπ = ( 1
N
∑Nk=1 ωk) I . We call
this method Cyclic Deterministic Bang-Bang Decoupling(CDBBD).
If we cannot guarantee that the network has such a closedpath, but we only know that it is connected, then it containsa spanning tree tr(G) with N − 1 edges. Let Pk denote theswap of the two agents linked by edge k of this spanningtree, for k = 1, 2, ..., N − 1. A recursive argument easilyshows that
∏N−1k=1 Pk = Pπ a cyclic permutation. Hence
N repetitions of a cycle of swaps on the N − 1 edges ofthe spanning tree has the same effect as CDBBD, only withan enlarged decoupling period covering N(N − 1) swaps.We call this approach Swapping Deterministic Bang-BangDecoupling (SDBBD).
B. Random Bang-Bang decoupling
We can dispose of the need for a supervisor by lettingthe decoupling actions take place randomly throughout thenetwork. Such random decoupling has already been inves-tigated in the quantum context [8], with positive results.During a given time interval [0, Tc], we apply decouplingactions at n (more or less) evenly spaced instants. At thek-th instant, a set of compatible graph edges whose agentswill be swapped is selected randomly from a (more or less)uniform distribution. This can be done in a decentralizedway. We denote the corresponding permutation P(k). Theeffective Hamiltonian over T is then to first order
H0 =1
n
n−1∑j=0
j∏k=1
P ∗(k)H0 P(k) .
The probability for this expression to be ε-close to λIconverges to 1 as n increases to ∞, provided the networkis connected and e.g. each edge is chosen according toan independent distribution at each time, with boundedprobability to not be chosen [11].
We can finally give the following formal synchronizationresult for multiple oscillators under Bang-Bang Decoupling.
Proposition 4: Consider N agents with dynamics (10) andapplying BBD as described above. The following propertieshold for the behavior of the system up to averaging approx-imation, as Tc → 0. Assume the interconnection graph isconnected. We have:Under SDBBD or CDBBD, if the agents start within asemicircle, then the phases converge to exact synchronizationfor any K and ω1, ..., ωN .Under RBBD, for any δ ∈ (0, 1) and ε > 0, there existsM > 0 such that for any n > M , if the agents remain withina semicircle of each other, then the phase is driven into theneighborhood of exact synchronization ‖eiθj − eiθk‖ ≤ ε,∀j, k = 1, 2, . . . , N , with probability p ≥ δ.Proof: For SDBBD and CDBBD, averaging under decou-pling gives the Kuramoto model with equal natural frequen-cies and a graph that varies in time according to the swappingof agents. It is known that this dynamics converges to phasesynchronization, for any time-varying graph, provided theinitial conditions are within half a circle (see e.g. [12]). ForRBBD we have a similar situation, with decoupling nowinducing a randomly varying graph. Any graph sequencewould drive the system with equal natural frequencies toexact phase synchronization, when starting within a semicir-cle. Arguments on random dynamical decoupling [8], [11]can be invoked to bound the effective drift that remains afteraveraging.
C. Simulations
We simulate synchronization under dynamical decouplingwith N = 3 agents with three kinds of switching, CDBBD,SDBBD and RBBD. The network for CDBBD is all-to-all, while for SDBBD and RBBD there are only two edgesas agents 1 and 3 are not directly coupled. We normalize
K = 1 and take drift vector ω = [ 1, 3.5, 6 ]T , initialphase vector θ = [ 0, π/3, 2π/3 ]T . The continuous linesshow the phase evolutions without dynamical decoupling,which clearly diverge with this parameter choice. Figure3 shows the evolution of phases under CDBBD, applyingPπ : (1, 2, 3) 7→ (2, 3, 1) every 0.25s for a decoupling periodTc = 0.75s. We observe that after convergence, the relativephases actually follow an evolution with a shorter periodTc/3. Qualitatively similar results are visible on Fig.4 forSDBBD. For random permutation we increase the decouplingspeed and apply a random permutation every 0.025s. Figure 5shows one typical random run, illustrating how with highprobability the drift effect is reduced and the relative phasesconverge to a close neighborhood of exact synchronization.Further simulations (not shown) confirm that switching fastermake the phases converge closer to each other.
0 0.5 1 1.5 2 2.5 3 3.50
1
2
3
4
5
6
7
8
time (s)
phas
e (π
)
agent 1 without DDagent 2 without DDagent 3 without DDagent 1 with CDBBDagent 2 with CDBBDagent 3 with CDBBD
Tc
Fig. 3. Phase evolutions with CDBBD, applying Pπ : (1, 2, 3) 7→ (2, 3, 1)every 0.25s, all-to-all coupling.
0 1 2 3 4 5 6 70
2
4
6
8
10
12
14
16
time (s)
phas
e (π
)
agent 1 without DDagent 2 without DDagent 3 without DDagent 1 with SDBBDagent 2 with SDBBDagent 3 with SDBBD
Tc
Fig. 4. Phase evolutions with SDBBD, applying alternatively P1 :(1, 2, 3) 7→ (2, 1, 3) and P2 : (1, 2, 3) 7→ (1, 3, 2) every 0.25s; Kuramotocoupling among oscillators (1, 2) and (2, 3).
V. CONCLUSION
This paper proposes a method to counter the effect of non-identical drift frequencies in coordination control of coupled
0 0.5 1 1.5 2 2.5 3 3.50
1
2
3
4
5
6
7
8
time (s)
phas
e (π
)
agent 1 without DDagent 2 without DDagent 3 without DDagent 1 with RBBDagent 2 with RBBDagent 3 with RBBD
T
Fig. 5. Phase evolutions with RBBD, applying P1 : (1, 2, 3) 7→ (2, 1, 3)or P2 : (1, 2, 3) 7→ (1, 3, 2) randomly every 0.025s; Kuramoto couplingamong oscillators (1, 2) and (2, 3).
oscillators, by adding a time-varying control signal inspiredby quantum dynamical decoupling. Convergence propertiesare analyzed in both two-agent and multi-agent situations.In particular, the oscillators can be brought closer to exactsynchronization by increasing the speed of the time-varyingdynamics. A direct extension of this work would be toadapt the continuous control version, known as Euleriandecoupling, to the multi-agent case. Future work will focuson developing dynamical decoupling solutions for othergeometric configuration spaces ubiquitous in robotics, likeSE(2) and SO(3), and possibly providing a general theory.
REFERENCES
[1] Y. Kuramoto. Chemical Oscillations, Waves, and Turbulence. Springer,1984.
[2] A. T. Winfree. The Geometry of Biological Time. Springer, 1980.[3] R. Sepulchre, D. A. Paley, and N. E. Leonard. Stabilization of planar
collective motion: all-to-all communication. IEEE Trans. Autom.Control, 52(5):811-824, 2007.
[4] A. Jadbabaie, N. Motee, and M. Barahona. On the stability of theKuramoto model of coupled nonlinear oscillators. Proc. Amer. ControlConference, pages 4296-4301, 2004.
[5] S.H. Strogatz. From Kuramoto to Crawford: exploring the onsetof synchronization in populations of coupled nonlinear oscillators.Physica D, 143:120, 2000.
[6] L. Viola, E. Knill, and S. Lloyd. Dynamical decoupling of openquantum systems. Physical Review Letters, 82(12):2417-2421, 1999.
[7] L. Viola and E. Knill. Robust dynamical decoupling of quantumsystems with bounded controls. Physical Review Letters, 90(3), 2003.
[8] L.F. Santos and L. Viola. Dynamical control of qubit coherence:random versus deterministic schemes. Physical Review A, 72(6):062303, 2005.
[9] J. J. Sakurai. Modern Quantum Mechanics. Addison-Wesley, NewYork, 2007.
[10] J. J. A. Sanders, F. Verhulst, and J. A. Murdock. Averaging methodsin nonlinear dynamical systems. Springer, 2007.
[11] L. Mazzarella, A. Sarlette and F. Ticozzi. From consensus to robustrandomized algorithms: a symmetrization approach. SIAM J. Controland Optimization, 2013, submitted.
[12] L. Moreau. Stability of multi-agent systems with time-dependentcommunication links. IEEE Trans. Autom. Control, 50(2):169-182,2005.