presentazione standard di powerpoint -...
TRANSCRIPT
6/12/2014
1
Ph.D Eleonora Guanziroli
Ingegnere Biomedico - Centro Riabilitativo Villa Beretta” Costa Masnaga - Ospedale Valduce Como
Seminario Tecnologie per la Disabilità Politecnico di Torino 04 Giugno 2014
“Ardo dal desiderio di spiegare, e la mia massima soddisfazione è prendere qualcosa di ragionevolmente intricato
e renderlo chiaro passo dopo passo. È il modo più facile per chiarire le cose a me stesso.”
Isaac Asimov
(1920-1992)
MEDICINA
MEDICO
TECNOLOGIA
INGEGNERE
INGEGNERE BIOMEDICO
≠
6/12/2014
2
“A tutti i folli. I solitari. I ribelli. Quelli che non si adattano. Quelli che non ci stanno. Quelli che sembrano sempre fuori luogo. Quelli che vedono le cose in modo differente. Quelli che non si adattano alle regole. E non hanno rispetto per lo status quo. Potete essere d'accordo con loro o non essere d'accordo. Li potete glorificare o diffamare. L'unica cosa che non potete fare è ignorarli. Perché cambiano le cose. Spingono la razza umana in avanti. E mentre qualcuno li considera dei folli, noi li consideriamo dei geni. Perché le persone che sono abbastanza folli da pensare di poter cambiare il mondo sono coloro che lo cambiano davvero.”
Steve Jobs
(1955-2011)
Due diversi approcci …
… finalizzati ad un obiettivo comune …
“Lezione di anatomia del dottor Tulp” Rembrandt
(1632)
“La preoccupazione dell'uomo e del suo destino devono sempre costituire l'interesse principale di tutti gli sforzi tecnici. Non dimenticatelo mai in mezzo a tutti i vostri diagrammi ed alle vostre equazioni.”
Albert Einstein (1879-1955)

6/12/2014
3
Kandel ER, Schwartz JH, Jessell TM - Principles of Neural Science - RR Donnelley & Sons, Inc.
Controllo anticipatorio che necessita di informazioni sensoriali e di esperienza pregressa
basato su un Modello Inverso (stima dei comandi motori necessari per ottenere la desiderata risposta sensoriale)
veloce evita i ritardi
… ma ...
non è in grado di correggere il movimento sulla base degli errori che si verificano a causa dell’inaccuratezza del modello inverso.
Inverse Model
Desired trajectory
Feed-forward motor command Controlled
object
Actual trajectory

6/12/2014
4
Controllo “real time”, è dipendente dal segnale sensoriale corrente e l’outcome desiderato viene sempre confrontato con un segnale di riferimento
Efficace per la correzione degli errori
… ma …
il principale problema è il ritardo con cui avviene questa correzione.
Desired trajectory
Feed-back Controller
Controlled object
State error Motor
Command
Sensor and sensory processing
x
Sensed State
+
-
Il compito motorio è il risultato di un controllo
feed-forward (apprendimento) che, in assenza di stimoli esterni,
potrebbe permettere l’esecuzione automatica del
movimento, e di un controllo feed-back che
modula le traiettorie sulla base delle afferenze
sensoriali.
6/12/2014
5
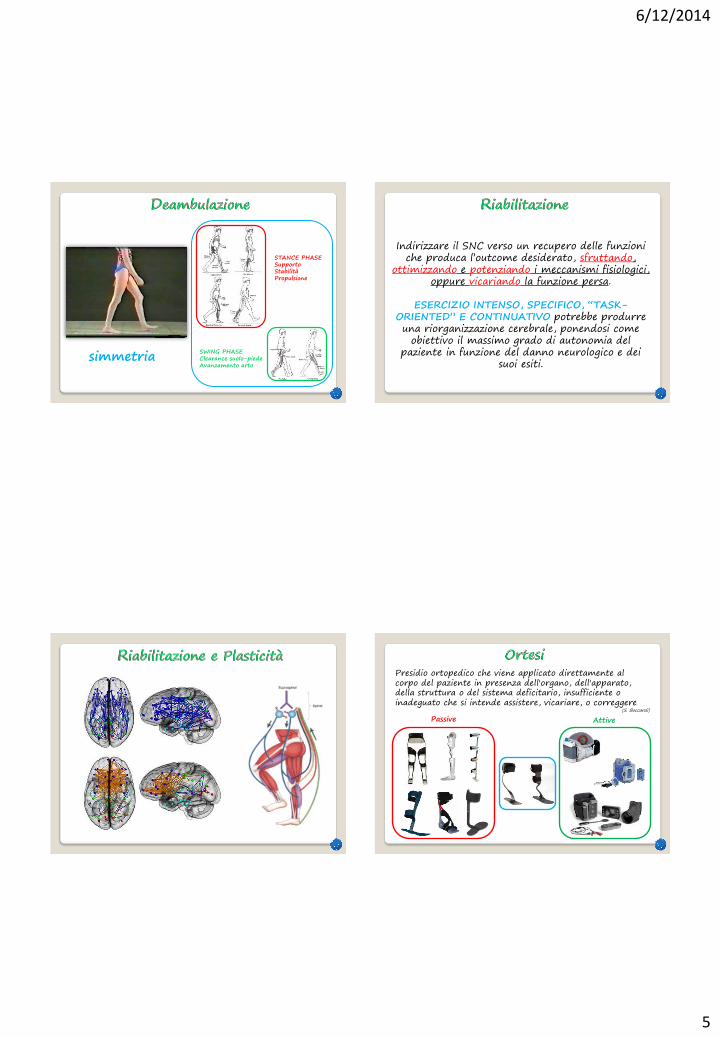
SWING PHASE Clearance suolo-piede Avanzamento arto
STANCE PHASE Supporto Stabilità Propulsione
simmetria
Indirizzare il SNC verso un recupero delle funzioni che produca l’outcome desiderato, sfruttando,
ottimizzando e potenziando i meccanismi fisiologici, oppure vicariando la funzione persa.
ESERCIZIO INTENSO, SPECIFICO, “TASK-
ORIENTED” E CONTINUATIVO potrebbe produrre una riorganizzazione cerebrale, ponendosi come
obiettivo il massimo grado di autonomia del paziente in funzione del danno neurologico e dei
suoi esiti.
Presidio ortopedico che viene applicato direttamente al corpo del paziente in presenza dell'organo, dell'apparato, della struttura o del sistema deficitario, insufficiente o inadeguato che si intende assistere, vicariare, o correggere
(S. Boccardi)
Passive Attive

6/12/2014
6
FES
[Rushton et al., 2003]
1 Motor axon fires both forward and backward
2 Voluntary effort must coincide
Hebb synapse conductivity increases; voluntary effort must coincide
4 Conduction is restored, and can be maintained without FES
3
Contemporanea stimolazione: afferenza (FES) e efferenza (contributo volontario)
Macchina automatica che, coordinata da un elaboratore elettronico, svolge compiti non predeterminati in sostituzione all'uomo
1- Un robot non può recare danno agli esseri Umani, né può permettere che, a causa del suo mancato intervento, gli esseri Umani ricevano danno.
2- Un robot deve obbedire agli ordini impartiti dagli esseri Umani, a meno che ciò non contrasti con la Prima Legge. 3- Un robot deve salvaguardare la propria esistenza, a meno che ciò non contrasti con la Prima o la Seconda Legge.
Io, Robot
Isaac Asimov 1950
Esoscheletri Robotizzati
… non solo per la realizzazione di compiti in sostituzione all’uomo …
… ma anche in sinergia all’uomo …
Il Giudizio Universale Michelangelo Buonarroti
(1536-1541)
=
ROBOT +
RIABILITAZIONE
RIABILITAZIONE ROBOTICA
6/12/2014
7
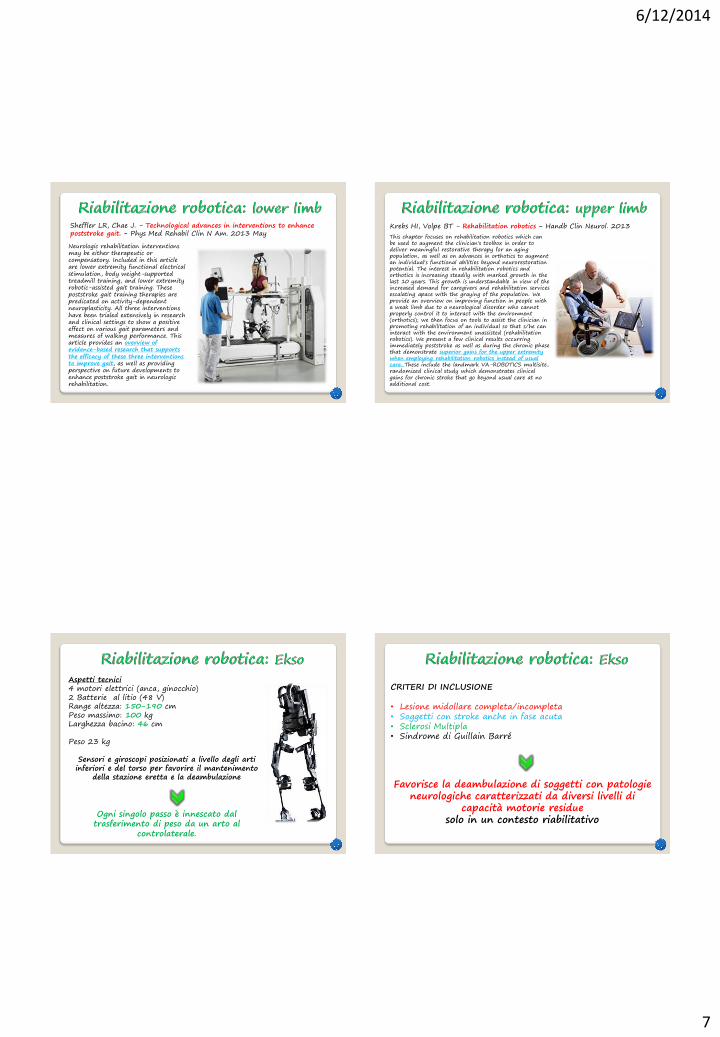
Sheffler LR, Chae J. - Technological advances in interventions to enhance poststroke gait. - Phys Med Rehabil Clin N Am. 2013 May
Neurologic rehabilitation interventions may be either therapeutic or compensatory. Included in this article are lower extremity functional electrical stimulation, body weight-supported treadmill training, and lower extremity robotic-assisted gait training. These poststroke gait training therapies are predicated on activity-dependent neuroplasticity. All three interventions have been trialed extensively in research and clinical settings to show a positive effect on various gait parameters and measures of walking performance. This article provides an overview of evidence-based research that supports the efficacy of these three interventions to improve gait, as well as providing perspective on future developments to enhance poststroke gait in neurologic rehabilitation.
Krebs HI, Volpe BT - Rehabilitation robotics - Handb Clin Neurol. 2013
This chapter focuses on rehabilitation robotics which can be used to augment the clinician's toolbox in order to deliver meaningful restorative therapy for an aging population, as well as on advances in orthotics to augment an individual's functional abilities beyond neurorestoration potential. The interest in rehabilitation robotics and orthotics is increasing steadily with marked growth in the last 10 years. This growth is understandable in view of the increased demand for caregivers and rehabilitation services escalating apace with the graying of the population. We provide an overview on improving function in people with a weak limb due to a neurological disorder who cannot properly control it to interact with the environment (orthotics); we then focus on tools to assist the clinician in promoting rehabilitation of an individual so that s/he can interact with the environment unassisted (rehabilitation robotics). We present a few clinical results occurring immediately poststroke as well as during the chronic phase that demonstrate superior gains for the upper extremity when employing rehabilitation robotics instead of usual care. These include the landmark VA-ROBOTICS multisite, randomized clinical study which demonstrates clinical gains for chronic stroke that go beyond usual care at no additional cost.
Aspetti tecnici 4 motori elettrici (anca, ginocchio) 2 Batterie al litio (48 V) Range altezza: 150-190 cm Peso massimo: 100 kg Larghezza bacino: 46 cm Peso 23 kg
Sensori e giroscopi posizionati a livello degli arti inferiori e del torso per favorire il mantenimento
della stazione eretta e la deambulazione
Ogni singolo passo è innescato dal
trasferimento di peso da un arto al controlaterale.
CRITERI DI INCLUSIONE • Lesione midollare completa/incompleta • Soggetti con stroke anche in fase acuta • Sclerosi Multipla • Sindrome di Guillain Barré
Favorisce la deambulazione di soggetti con patologie neurologiche caratterizzati da diversi livelli di
capacità motorie residue solo in un contesto riabilitativo
6/12/2014
8
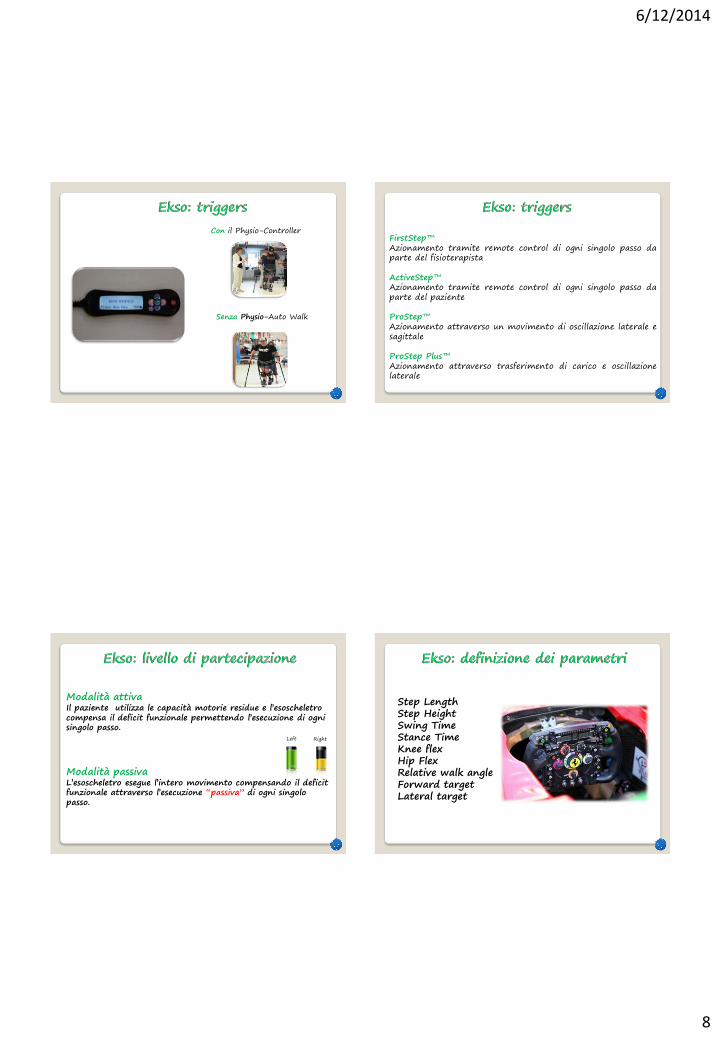
Con il Physio-Controller
Senza Physio-Auto Walk
FirstStep™ Azionamento tramite remote control di ogni singolo passo da parte del fisioterapista ActiveStep™ Azionamento tramite remote control di ogni singolo passo da parte del paziente ProStep™ Azionamento attraverso un movimento di oscillazione laterale e sagittale ProStep Plus™ Azionamento attraverso trasferimento di carico e oscillazione laterale
Modalità attiva Il paziente utilizza le capacità motorie residue e l’esoscheletro compensa il deficit funzionale permettendo l’esecuzione di ogni singolo passo. Modalità passiva L’esoscheletro esegue l’intero movimento compensando il deficit funzionale attraverso l’esecuzione “passiva” di ogni singolo passo.
Left Right
Step Length Step Height Swing Time Stance Time Knee flex Hip Flex Relative walk angle Forward target Lateral target
6/12/2014
9
Batterie e unità di
controllo
Attuatore Interfaccia Paziente
Sensore di Tilt
Controllore Wireless
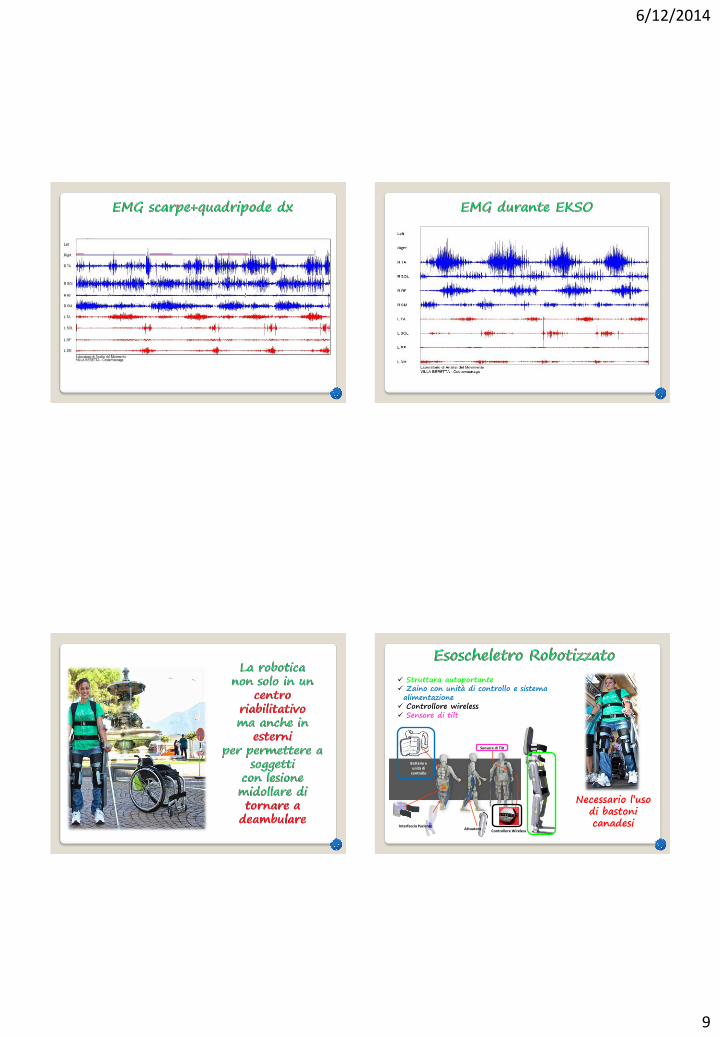
Struttura autoportante Zaino con unità di controllo e sistema alimentazione Controllore wireless Sensore di tilt
Necessario l’uso di bastoni canadesi
6/12/2014
10
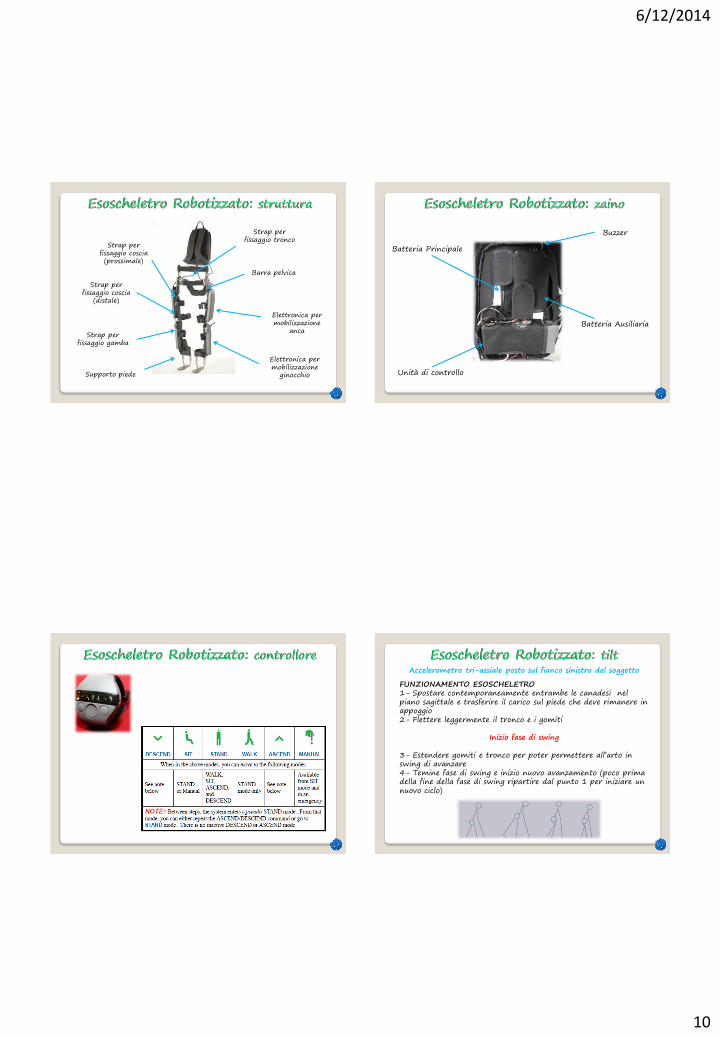
Barra pelvica
Elettronica per mobilizzazione
anca
Elettronica per mobilizzazione
ginocchio
Strap per fissaggio coscia (prossimale)
Strap per fissaggio coscia
(distale)
Strap per fissaggio gamba
Supporto piede
Strap per fissaggio tronco
Unità di controllo
Batteria Principale
Batteria Ausiliaria
Buzzer
FUNZIONAMENTO ESOSCHELETRO 1- Spostare contemporaneamente entrambe le canadesi nel piano sagittale e trasferire il carico sul piede che deve rimanere in appoggio 2- Flettere leggermente il tronco e i gomiti
Inizio fase di swing
3- Estendere gomiti e tronco per poter permettere all’arto in swing di avanzare 4- Temine fase di swing e inizio nuovo avanzamento (poco prima della fine della fase di swing ripartire dal punto 1 per iniziare un nuovo ciclo)
Accelerometro tri-assiale posto sul fianco sinistro del soggetto
6/12/2014
11
41
41
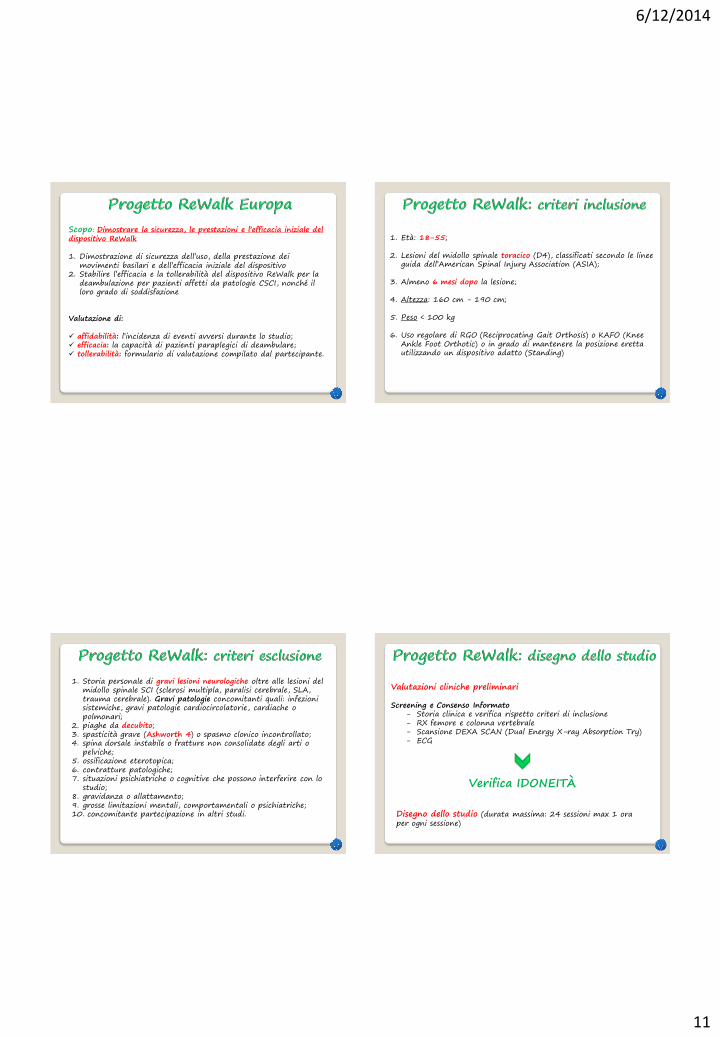
Scopo: Dimostrare la sicurezza, le prestazioni e l’efficacia iniziale del dispositivo ReWalk 1. Dimostrazione di sicurezza dell’uso, della prestazione dei
movimenti basilari e dell’efficacia iniziale del dispositivo 2. Stabilire l’efficacia e la tollerabilità del dispositivo ReWalk per la
deambulazione per pazienti affetti da patologie CSCI, nonché il loro grado di soddisfazione
Valutazione di: affidabilità: l’incidenza di eventi avversi durante lo studio; efficacia: la capacità di pazienti paraplegici di deambulare; tollerabilità: formulario di valutazione compilato dal partecipante.
42
42
1. Età: 18-55;
2. Lesioni del midollo spinale toracico (D4), classificati secondo le linee guida dell’American Spinal Injury Association (ASIA);
3. Almeno 6 mesi dopo la lesione;
4. Altezza: 160 cm - 190 cm;
5. Peso < 100 kg
6. Uso regolare di RGO (Reciprocating Gait Orthosis) o KAFO (Knee Ankle Foot Orthotic) o in grado di mantenere la posizione eretta utilizzando un dispositivo adatto (Standing)
43
43
1. Storia personale di gravi lesioni neurologiche oltre alle lesioni del midollo spinale SCI (sclerosi multipla, paralisi cerebrale, SLA, trauma cerebrale). Gravi patologie concomitanti quali: infezioni sistemiche, gravi patologie cardiocircolatorie, cardiache o polmonari;
2. piaghe da decubito; 3. spasticità grave (Ashworth 4) o spasmo clonico incontrollato; 4. spina dorsale instabile o fratture non consolidate degli arti o
pelviche; 5. ossificazione eterotopica; 6. contratture patologiche; 7. situazioni psichiatriche o cognitive che possono interferire con lo
studio; 8. gravidanza o allattamento; 9. grosse limitazioni mentali, comportamentali o psichiatriche; 10. concomitante partecipazione in altri studi.
44
44
Valutazioni cliniche preliminari Screening e Consenso Informato
- Storia clinica e verifica rispetto criteri di inclusione - RX femore e colonna vertebrale - Scansione DEXA SCAN (Dual Energy X-ray Absorption Try) - ECG
Verifica IDONEITÀ
Disegno dello studio (durata massima: 24 sessioni max 1 ora per ogni sessione)

6/12/2014
12
45
45
46
46
Cammino continuo per 6 minuti (metri percorsi) Cammino per 10 metri (tempo impiegato) Parametri rilevati pre/post sessione Frequenza cardiaca Pressione arteriosa Modified Ashworth Scale Visual Analogic Scale dolore/fatica
47
47
10 Maschi, 3 Femmine Età media: 37.1 ± 9.05 anni
Distanza media dal trauma: 7.54 ± 4.65 anni
No Età Sesso Peso Altezza
Data del trauma Livello
neurologico della lesione
Numero sessioni
(kg) (cm)
Pz 1 52 M 67 165 26/12/2001 L4 33 Pz 2 34 M 78 190 01/07/2008 D10-D11 19 Pz 3 32 M 60 165 01/06/2002 D9-D12 15 Pz 4 38 F 50 163 01/08/2007 D11-D12 14 Pz 5 37 M 90 180 23/11/2008 D4-D5 23 Pz 6 31 M 60 170 14/07/2009 D4-D5 22 Pz 8 56 M 67 160 22/07/2007 D7 21 Pz 9 24 F 50 160 01/06/2010 D6-D7 21
Pz 10 28 F 48 160 20/08/2009 L1 23
Pz 11 37 M 85 180 25/04/2001 D4-D5 20
Pz 12 39 M 70 170 25/04/2000 D7-D8 24
Pz 13 31 M 80 182 11/04/2012 D11-D12 24
Pz 15 43 M 57 166 30/04/1997 D6-D7 24
48
48
Distanza media percorsa: 88.45 ± 37.04 m
Distanza media: 50.08 ± 16.94 m Distanza media: 112.44 ± 21.87 m INCREMENTO 124.52%
6/12/2014
13
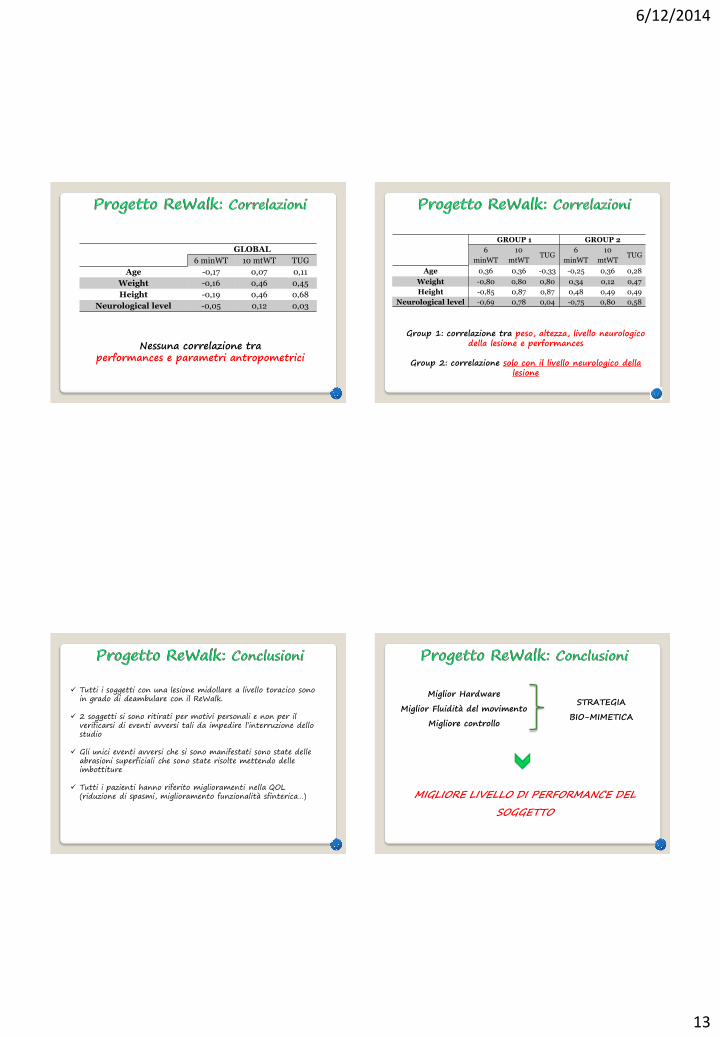
GLOBAL
6 minWT 10 mtWT TUG
Age -0,17 0,07 0,11
Weight -0,16 0,46 0,45
Height -0,19 0,46 0,68
Neurological level -0,05 0,12 0,03
Nessuna correlazione tra performances e parametri antropometrici
GROUP 1 GROUP 2
6
minWT
10
mtWT TUG
6
minWT
10
mtWT TUG
Age 0,36 0,36 -0,33 -0,25 0,36 0,28
Weight -0,80 0,80 0,80 0,34 0,12 0,47
Height -0,85 0,87 0,87 0,48 0,49 0,49
Neurological level -0,69 0,78 0,04 -0,75 0,80 0,58
Group 1: correlazione tra peso, altezza, livello neurologico della lesione e performances
Group 2: correlazione solo con il livello neurologico della
lesione
51
51
Tutti i soggetti con una lesione midollare a livello toracico sono in grado di deambulare con il ReWalk.
2 soggetti si sono ritirati per motivi personali e non per il verificarsi di eventi avversi tali da impedire l’interruzione dello studio
Gli unici eventi avversi che si sono manifestati sono state delle abrasioni superficiali che sono state risolte mettendo delle imbottiture
Tutti i pazienti hanno riferito miglioramenti nella QOL (riduzione di spasmi, miglioramento funzionalità sfinterica…)
52
52
Miglior Hardware
Miglior Fluidità del movimento
Migliore controllo
MIGLIORE LIVELLO DI PERFORMANCE DEL
SOGGETTO
STRATEGIA
BIO-MIMETICA
6/12/2014
14
53
53
54
54
Data evento: 20/08/2009 Livello Lesione: L1 Età: 28 anni
Distanza per 6mWT: 125 m
“Lo studio e la ricerca della verità e della bellezza rappresentano una sfera di attività in cui è permesso di
rimanere bambini per tutta la vita. ”
Albert Einstein (1879-1955)
56
56
LUGANO Risultato: 5 km in 3.20 h
MILANO Risultato: 6 km in 4 h
6/12/2014
15
57
57
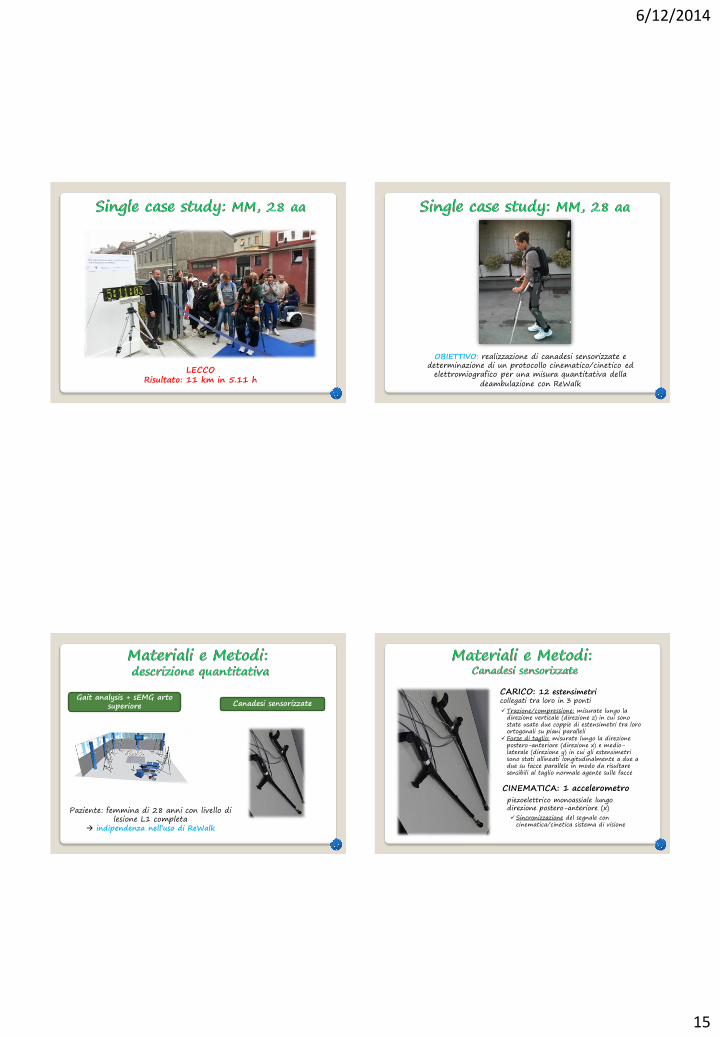
LECCO Risultato: 11 km in 5.11 h
OBIETTIVO: realizzazione di canadesi sensorizzate e determinazione di un protocollo cinematico/cinetico ed
elettromiografico per una misura quantitativa della deambulazione con ReWalk
Gait analysis + sEMG arto superiore Canadesi sensorizzate
Paziente: femmina di 28 anni con livello di lesione L1 completa
indipendenza nell’uso di ReWalk
CARICO: 12 estensimetri collegati tra loro in 3 ponti
Trazione/compressione: misurate lungo la direzione verticale (direzione z) in cui sono state usate due coppie di estensimetri tra loro ortogonali su piani paralleli
Forze di taglio: misurate lungo la direzione postero-anteriore (direzione x) e medio-laterale (direzione y) in cui gli estensimetri sono stati allineati longitudinalmente a due a due su facce parallele in modo da risultare sensibili al taglio normale agente sulle facce
CINEMATICA: 1 accelerometro
piezoelettrico monoassiale lungo direzione postero-anteriore (x) Sincronizzazione del segnale con
cinematica/cinetica sistema di visione
6/12/2014
16
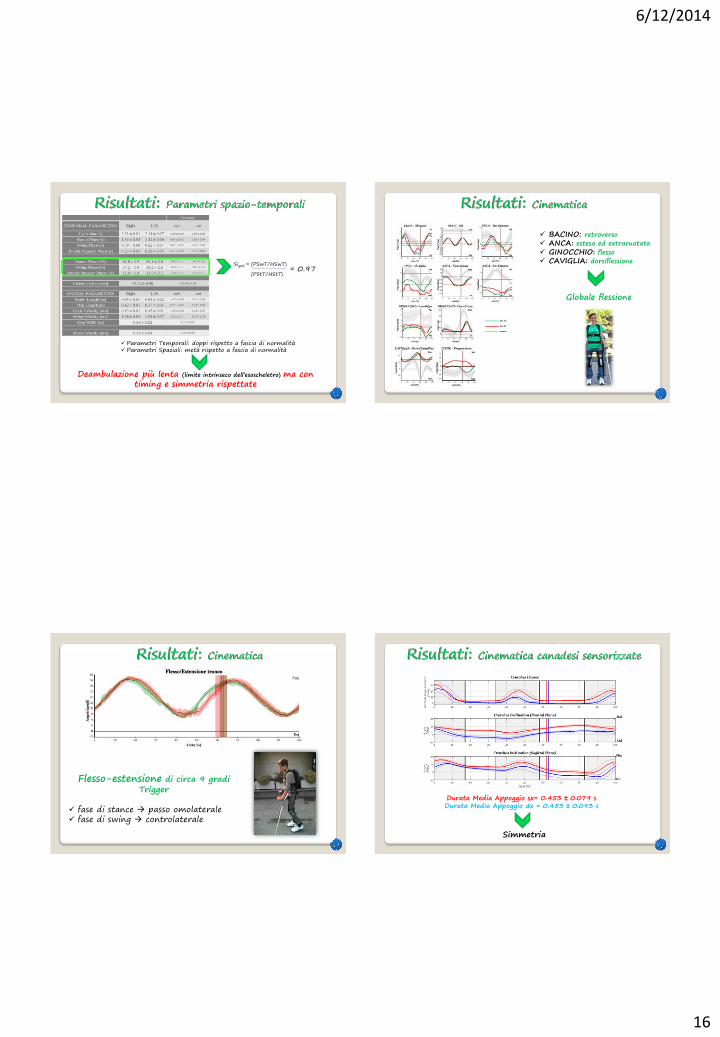
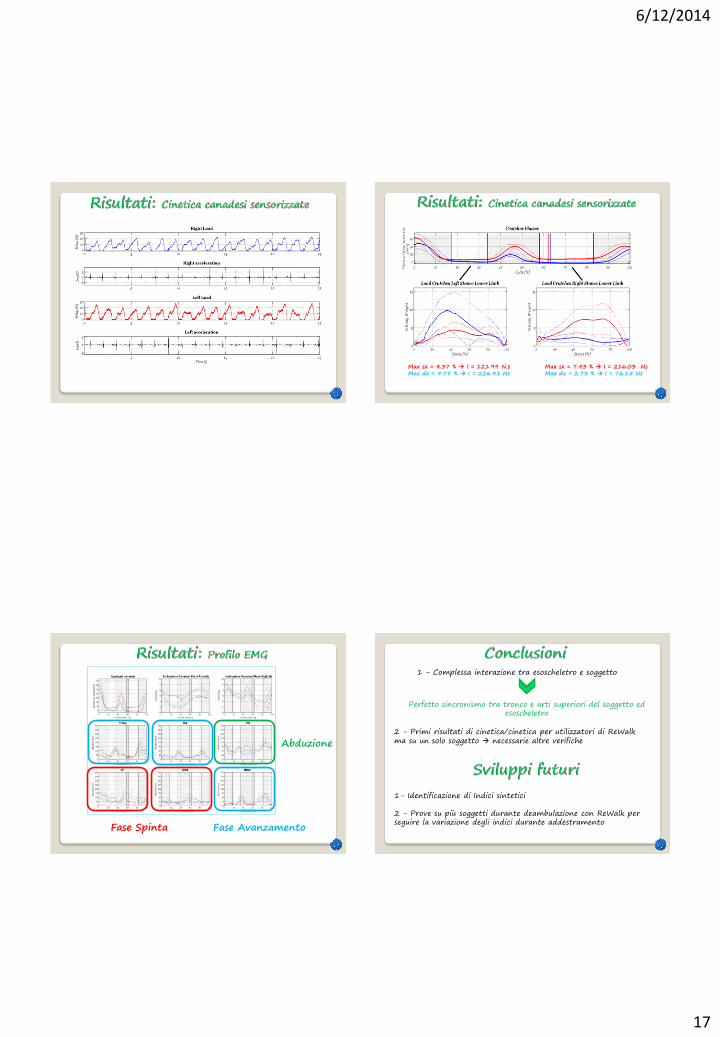
Parametri Temporali: doppi rispetto a fascia di normalità Parametri Spaziali: metà rispetto a fascia di normalità
Deambulazione più lenta (limite intrinseco dell’esoscheletro) ma con timing e simmetria rispettate
Sigait = (PSwT/HSwT)
(PStT/HStT) = 0.97
BACINO: retroverso ANCA: estesa ed extraruotata GINOCCHIO: flesso CAVIGLIA: dorsiflessione
Globale flessione
Flesso-estensione di circa 9 gradi Trigger
fase di stance passo omolaterale fase di swing controlaterale
Durata Media Appoggio sx= 0.453 ± 0.079 s Durata Media Appoggio dx = 0.453 ± 0.093 s
Simmetria
6/12/2014
17
Max sx = 7.43 % I = 216.03 Ns Max dx = 2.73 % I = 76.15 Ns
Max sx = 4.37 % I = 121.99 N.s Max dx = 9.75 % I = 226.91 Ns
Abduzione
Fase Spinta Fase Avanzamento
1 - Complessa interazione tra esoscheletro e soggetto
1- Identificazione di Indici sintetici 2 - Prove su più soggetti durante deambulazione con ReWalk per seguire la variazione degli indici durante addestramento
Perfetto sincronismo tra tronco e arti superiori del soggetto ed esoscheletro
2 - Primi risultati di cinetica/cinetica per utilizzatori di ReWalk ma su un solo soggetto necessarie altre verifiche
6/12/2014
18
69
69
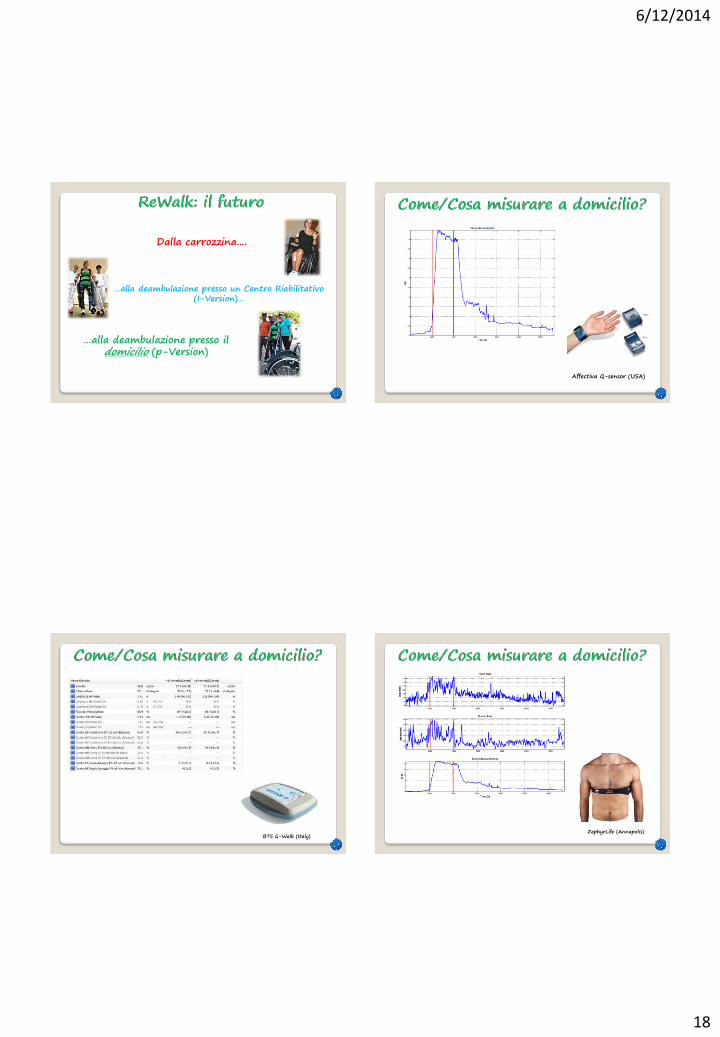
Dalla carrozzina….
…alla deambulazione presso un Centro Riabilitativo (I-Version)…
…alla deambulazione presso il domicilio (p-Version)
70
70
Affectiva Q-sensor (USA)
71
71
BTS G-Walk (Italy) 72
72
ZephyrLife (Annapolis)
6/12/2014
19
73
73
74
74
75
75
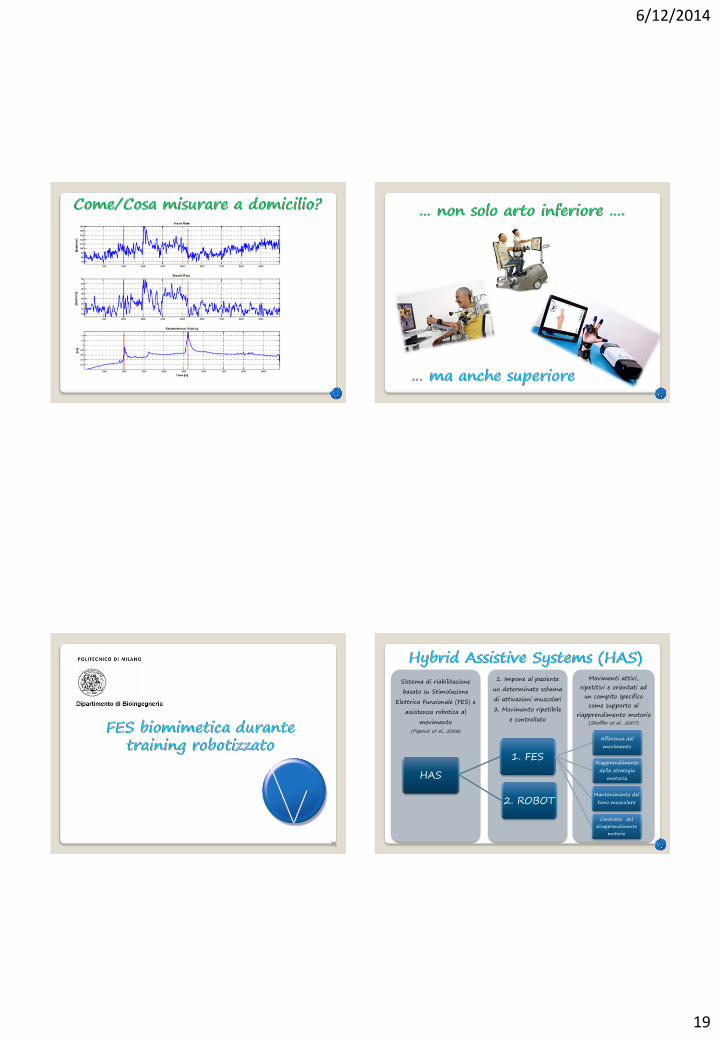
Movimenti attivi,
ripetitivi e orientati ad
un compito specifico
come supporto al
riapprendimento motorio (Sheffler et al., 2007)
1. Impone al paziente
un determinato schema
di attivazioni muscolari
2. Movimento ripetibile
e controllato
Sistema di riabilitazione
basato su Stimolazione
Elettrica Funzionale (FES) e
assistenza robotica al
movimento
(Popovic et al., 2006)
HAS
1. FES
Afferenza del
movimento
Riapprendimento
della strategia
motoria
Mantenimento del
tono muscolare
Contrasto del
disapprendimento
motorio
2. ROBOT
6/12/2014
20
77
77
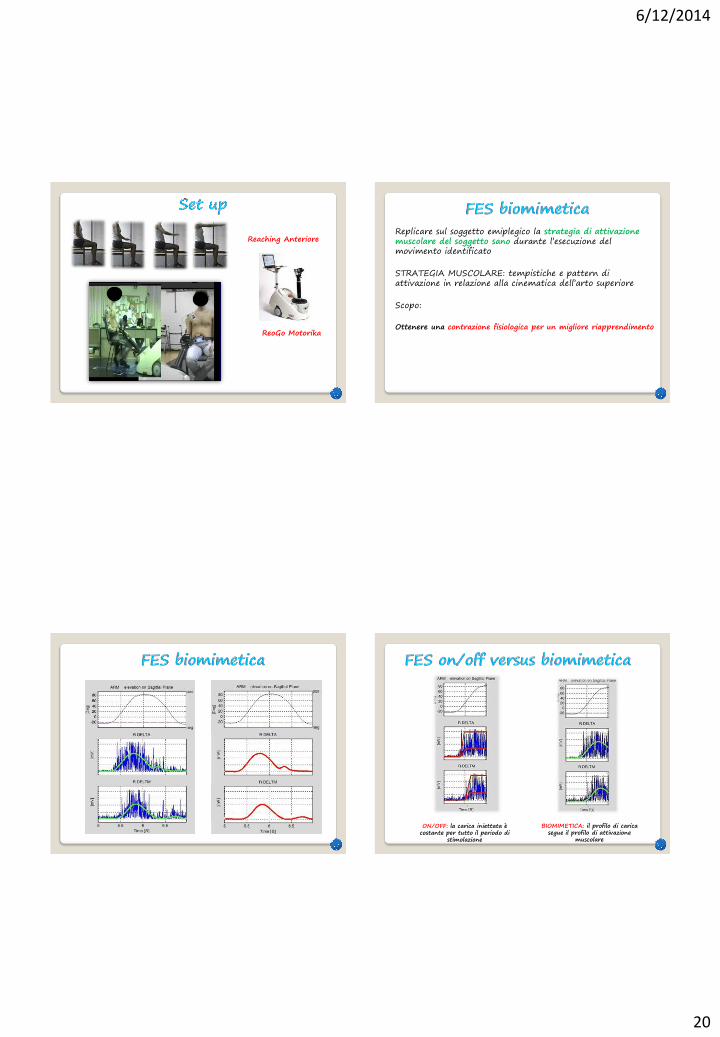
Reaching Anteriore
ReoGo Motorika
78
78
Replicare sul soggetto emiplegico la strategia di attivazione muscolare del soggetto sano durante l’esecuzione del movimento identificato STRATEGIA MUSCOLARE: tempistiche e pattern di attivazione in relazione alla cinematica dell’arto superiore Scopo: Ottenere una contrazione fisiologica per un migliore riapprendimento
79
79
80
80
ON/OFF: la carica iniettata è costante per tutto il periodo di
stimolazione
BIOMIMETICA: il profilo di carica segue il profilo di attivazione
muscolare

6/12/2014
21
81
81
Angoli di elevazione di spalla e di angolo al gomito per la modalità guidata senza FES (parte sinistra) e con FES (parte destra). Nel grafico relativo all’angolo al gomito si può osservare l’adattamento alla FES (primi 3
movimenti cerchiati).
82
82
Maggiore estensione gomito a fine movimento
83
83
FES non ha mai provocato un peggioramento di cinematica, di ripetibilità e di fluidità del movimento rispetto alla sola movimentazione robotica ma, in alcuni casi, ha prodotto dei leggeri miglioramenti. FES è ben tollerata e non introduce distorsioni nella strategia motoria.
84
84
6/12/2014
22
85
85
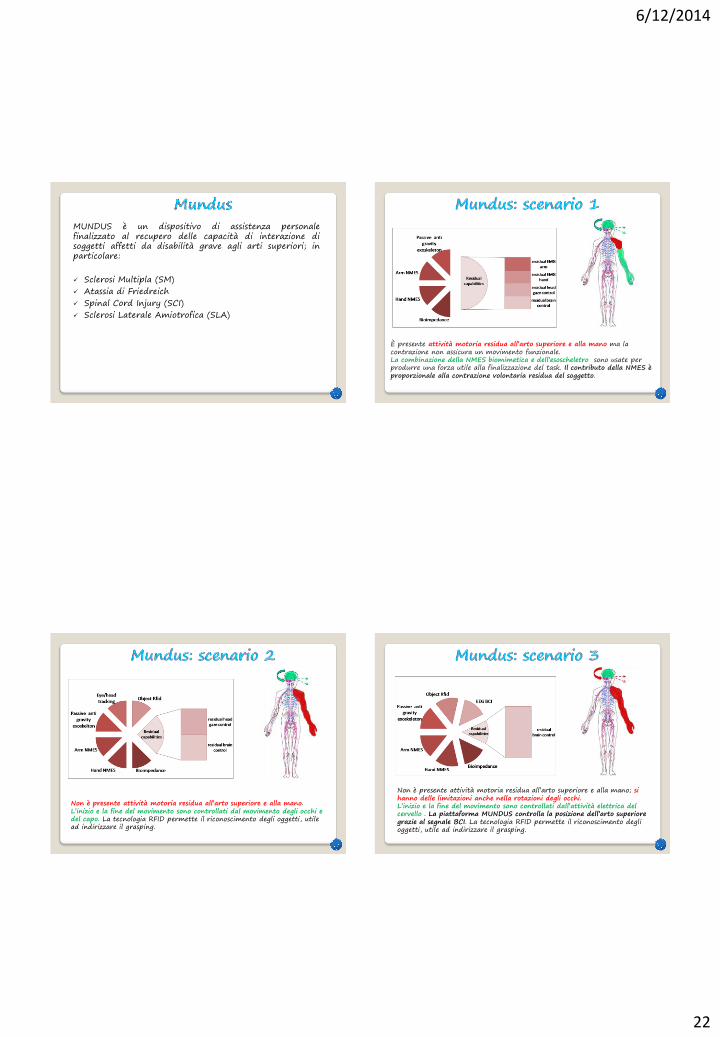
MUNDUS è un dispositivo di assistenza personale finalizzato al recupero delle capacità di interazione di soggetti affetti da disabilità grave agli arti superiori; in particolare: Sclerosi Multipla (SM) Atassia di Friedreich Spinal Cord Injury (SCI) Sclerosi Laterale Amiotrofica (SLA)
86
86
È presente attività motoria residua all’arto superiore e alla mano ma la contrazione non assicura un movimento funzionale. La combinazione della NMES biomimetica e dell’esoscheletro sono usate per produrre una forza utile alla finalizzazione del task. Il contributo della NMES è proporzionale alla contrazione volontaria residua del soggetto.
87
87
Non è presente attività motoria residua all’arto superiore e alla mano. L’inizio e la fine del movimento sono controllati dal movimento degli occhi e del capo. La tecnologia RFID permette il riconoscimento degli oggetti, utile ad indirizzare il grasping.
88
88
Non è presente attività motoria residua all’arto superiore e alla mano; si hanno delle limitazioni anche nella rotazioni degli occhi. L’inizio e la fine del movimento sono controllati dall’attività elettrica del cervello . La piattaforma MUNDUS controlla la posizione dell’arto superiore grazie al segnale BCI. La tecnologia RFID permette il riconoscimento degli oggetti, utile ad indirizzare il grasping.

6/12/2014
23
89
89
90
90
91
91
Free reaching
Natural velocity (RchNat )
Slow velocity (RchSlw )
Assisted reaching
Constant velocity profile
• Follow mod.(StrFlw )
• Push mod.(StrPush )
Natural velocity profile
• Follow mod. (StrFlw )
• Push mod. (StrPush )
STRAIGHT path
Natural velocity profile
Follow mod.(NatFlw )
Push mod.(NatPush )
NATURAL path
Constant velocity profile
• Follow mod.(NatFlw )
• Push mod.( NatPush )
“Il nostro tempo è limitato, per cui non lo dobbiamo sprecare vivendo la vita di qualcun altro. Non facciamoci intrappolare
dai dogmi, che vuol dire vivere seguendo i risultati del pensiero di altre persone. Non lasciamo che il rumore delle opinioni
altrui offuschi la nostra voce interiore. E, cosa più importante di tutte, dobbiamo avere il coraggio di seguire il nostro cuore e
la nostra intuizione. In qualche modo, essi sanno che cosa vogliamo realmente diventare. Tutto il resto è secondario.”
Steve Jobs
(1955-2011)