nonlinear observer design
TRANSCRIPT

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State Observer Design
Sopasakis Pantelis
October 5, 2012
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
What is a Distribution
A distribution is a mapping D : <n −→ V(<n) which maps everyx ∈ <n to a linear subspace of <n according to the formulaD(x) = span{f1 (x) , f2 (x) , . . . , fp (x)}, where fi : <n −→ <n are thegenerator vector fields. The set of all distributions definedU ⊂ <n will be denoted as D(U).
Sopasakis Pantelis State Observer Design
The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
Some Definitions
I A distribution is called nonsingular or a distribution ofconstant-degree k if dimD(x) = k for every x ∈ <n.
I Let D ∈ D(U). A x0 ∈ U is said to be a regular point of D ifthere exists an open neighborhood U0 of x0 such that D isnonsingular in U0.
I A distribution D is called smooth if there exist vector fields{fi}i∈F that span D.
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
A fundamental result on smooth distributions
Let D ∈ D(U) be a nonsingular smooth distribution of constantdegree k and Y : U −→ <n a smooth vector-valued function in D,i.e Y (x) ∈ D(x) for every x ∈ U. Then there exist k smoothreal-valued functions mj : U → < such that
Y (x) =k∑
j=1
mj(x)Xj(x)
where Xj ∈ D.
Sopasakis Pantelis State Observer Design
The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
Lie Algebras on Mn(<) and C∞(<n).
A Lie Algebra is a linear vector space L over a field F endowedwith a bilinear operation [·, ·] : L× L→ L, such that:
1. [x , x ] = 0 for every x ∈ L
2. [x [yz ]] + [y [zx ]] + [z [xy ]] = 0 for every x , y , z ∈ L
This operator is known as Lie Bracket or Commutator.
1. If L = Mn(<) then the commutator is (usually) defiend to be[A,B] = AB − BA for every A,B ∈ Mn(<).
2. If L = C inf(<n) then [f , g ] = ∇g · f −∇f · g
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
Involutive Distributions
A distribution D ∈ D(U) is called involutive if [f , g ] ∈ D for everyf , g ∈ D.
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
Duality
A codistribution is a mapping W : <n → V((<n)?) which mapsevery x ∈ <n to a linear subspace of (<n)?. The set ofcodistributions defined on a subset U ⊂ <n is denoted by D?(U).
The annihilator of a distribution D ∈ D(U) is a codistributionD⊥ ∈ D?(U) defined as
D⊥(x) = {w ∈ (<n)? : 〈w , u〉 = 0, ∀u ∈ D(x)}
It is remarkable that dim(D) + dim(D?) = n.
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
The Distribution Integrability Problem
Problem Formulation:Given a distribution DF ∈ D(U) of constant degree p which isspanned by the k ≥ p columns of a mapping F : <n → Mn×k(<)specify necessary and sufficient conditions such that there existn − p vector fields λ1, λ2, . . . , λp : U → <n that their derivativesannigilate the vector fields in D, i.e.
dλj · F (x) = 0
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
Complete Integrability
Let D be a nonsingular distribution of constant degree d definedon an open set U ⊂ <n and 〈U〉 = <n. The distribution D iscalled completely integrable if for each x0 ∈ U there exists anopen neighborhood U0 of x0 and n − d real-valued functionsλ1, λ2, . . . , λn−d , defined on U0 such that dλ1, dλ2, . . . , dλn−dspan the annihilator of D.
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Introduction to DistributionsDuality and IntegrabilityThe Frobenius Theorem
The Frobenius Theorem
Let D ∈ D(U) be a nonsingular distribution of constant degree dand 〈U〉 = <n. The following are equivalent:
1. D is completely integrable
2. D is involutive
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Local Decompositions of Control SystemsState Observability
f -invariant distributions
Let D ∈ D(U) and f : <n → <n. The distribution D is said to bef -invariant if for every τ ∈ D : [f , τ ] ∈ D.
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Local Decompositions of Control SystemsState Observability
Local Inner Triangular Decomposition ∗
Let D be a distribution posessing the following properties:
1. D is nonsingular, of constant degree d and involutive.
2. D is f -invariant for some f : <n → <n
Then for every x0 ∈ U there exists a neighborhood U0 3 x0 and acoordinate transormation z = Φ(x); x ∈ U, such that:
f (z) = f (Φ−1(x)) =
f1 (z1, z2, . . . , zd , zd+1, . . . , zn)f2 (z1, z2, . . . , zd , zd+1, . . . , zn)
. . .
fd (zd , zd+1, . . . , zn). . .
fn (zd , zd+1, . . . , zn)
A.J.Kerner, Normal Forms for linear and nonlinear systems, Contemp. Math. 68, 157-189, 1987
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Local Decompositions of Control SystemsState Observability
How much state can we know? ∗∗
For a dynamic system
x = f (x) +∑m
i=1 gi (x)uiy = h(x), y ∈ <p
Let its triangular representation be:
ζ1 = θ1 (ζ1, ζ2) +∑m
i=1 γ1,i (ζ1, ζ2) uiζ2 = θ2 (ζ2) +
∑mi=1 γ2,i (ζ2) ui
yi = hi (ζ2)
for x ∈ U0 3 x0. The “unobservable” manifold of the system is theslice:
Sx = {υ ∈ U0 : ζ2 (υ) = ζ2 (x)}
S.R.Kou, D.L.Eliot and T.J.Tarn, Observability of Nonlinear Systems, Information and Control 22(1), 89-99, 1972
Sopasakis Pantelis State Observer Design
The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Observers
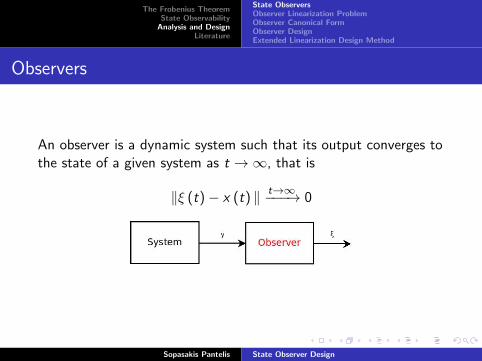
An observer is a dynamic system such that its output converges tothe state of a given system as t →∞, that is
‖ξ (t)− x (t) ‖ t→∞−−−→ 0
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
The Observer Linearization Problem ∗∗∗
Given a dynamical system x = f (x), y = h(x) with scalar output yand an initial state x0, specify a neighborhood U0 3 x0 and a localcoord. transf. z = Φ(x) and a mapping k : h(U0)→ <n such that:[
∂Φ∂x f (x)
]x=Φ−1(z)
= Az + k(Cz)
h(Φ−1(z)) = Cz
for z ∈ Φ(U0) and A ∈ Mn(<) and CT ∈ <nsuch that:
rank
CCA
...CAn−1
= n⇔ (C ,A) is observable
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Solvability of the Observer Linearization Problem ∗∗∗∗
The OLP is solvable at x0 only if the following conditions holds:
dim span{dh|x0 , d (fh) |x0 , d
(f 2h)|x0 , . . . , d
(f n−1h
)|x0
}= n
where fh = f (h) = 〈dh, f 〉 = Lf h and f kh = Lkf h
A. Isidori, Nonlinear Control Systems - An Introduction, Springer-Verlag editions, 2ns ed, 1989, pp.217-226
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Solvability of the Observer Linearization Problem
The OLP is solvable at x0 iff the following conditions hold:
1. dim span{dh|x0 , d (fh) |x0 , d
(f 2h)|x0 , . . . , d
(f n−1h
)|x0
}= n
2. The unique vector field τ which satisfiesdh|x0
d (fh) |x0
d(f 2h)|x0
...d(f n−1h
)|x0
· τ =
00...01
is such that
[ad i
f τ, adjf τ]
= 0 for every 0 ≤ i and j ≤ n − 1
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Observer Canonical Form
Given an observable system x = f (x) with x ∈ <n and y = h(x)with y ∈ < find a local coord. trans x = T (x∗) s.t.
x∗ =
0 · · · 0
1...
. . ....
1 0
x∗ −
f ∗0 (x∗n )f ∗1 (x∗n )
...f ∗n−1 (x∗n )
= f ∗ (x∗)
y =[
0 . . . 0 1]x∗ = ηT x∗
X.H. Xia, W.B. Gao, Nonlinear observer design by observer canonical forms, Int. J. contr. 47(4) 2988, 1081-1100
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Inverted Pendulum - OCF ∗∗∗∗∗
Suppose of the system: x1
x2
x3
=
x2
sinx1 + x3
x2 + x3
= f (x)
y = x1 = h (x)
Hint:
O(x) · ∂T∂x∗1= η and ∂T
∂x∗ =[ad0
f∂T∂x∗1
· · · adn−1f
∂T∂x∗1
]
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Inverted Pendulum - OCF
The OCF of the inverted pendulum nonlinear system is:
x∗ =
0 0 01 0 00 1 0
x∗ +
sinx∗3x∗3 + sinx∗3
x∗3
= f ∗(x∗)
y = x∗3
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Observer Design Based on the OCF
With every observable system in the OCF we associate thefollowing observer:
ξ =
0 0 0 · · · 01 0 0 · · · 00 1 0 · · · 0...
.... . .
...0 0 · · · 1 0
−
f ∗0 (x∗n )f ∗1 (x∗n )
...f ∗n−1 (x∗n )
− KT e
where e = ξ − x∗ and KT =[k0 k1 · · · kn−1
]∈ <n
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Error Dynamics
The error e∗ = ξ − x∗ evolves with respect to the linear dynamics:
dedt =
0 0 0 · · · −k0
1 0 0 · · · −k1
0 1 0 · · · −k2...
.... . .
...0 0 · · · 1 −kn−1
e = Y · e
The characteristic polynomial of the matrix Y is
χ (Y ) (s) = k0 + k1s + . . .+ kn−1sn−1 + sn
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Introduction to Extended Linearization
Extended Linearization is a method to tackle the observer designproblem for control systems
x = f (x , u)y = h (x)
x ∈ <n, y ∈ <p, u ∈ <f (0, 0) = 0, h (0) = 0
Let {u = ε, x = xε, f (xε, ε) = 0} be a collection of equillibriumpoints. We assume that the observer admits the representation:
ξ = f (ξ, u) + g (y)− g (y)
B.Walcott et al., Comparative study of nonlinear state observation techniques, Int. J. Contr. 45(6) 1987, 2109-32
F.Thau, Observing the state of nonlinear dynamic systems,Int. J. Contrl 17(3), 1973, 471-9
Sopasakis Pantelis State Observer Design
The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Observer Error Dynamics
Let us define e = x − ξ, with ξ = f (ξ, u) + g (y)− g (y). Then:
e = x − ξ = f (x , u)− f (x − e, u)− g (y) + g (y)
for (x , u) close to (xε, ε) we have:
e = [D1f (xε, ε)− Dg (yε)Dh (xε)] e = Ye
The aim of the design consists in determining proper analyticfunction g such that Y perserves constant stable eigenvalues -independent of ε!
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Assumptions
We assume that the following hold:
1. D1f (0, 0)−1 exists
2. (D1f (0, 0) ,Dh (0)) is observable
3. ∂yε∂ε |ε=0 = Dyε|ε=0 = Dh (0)Dxε (0) =
−Dh (0) [D1f (0, 0)]−1 6= 0
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Since (D1f (0, 0) ,Dh (0)) is observable,(D1f (0, 0)T ,Dh (0)T
)is
controllable. Hence we may use the Ackermann’s synthesis formulato determine a C : < → <n such that
D1f (xε, ε)T − Dh (xε)T C (ε)
has a prespecified desired spectrum. Have we found C , g is givenby:
Dg (yε)T = C (ε)
More Details on the whiteboard...
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
State ObserversObserver Linearization ProblemObserver Canonical FormObserver DesignExtended Linearization Design Method
Fin!
Thank you for your attention!
Sopasakis Pantelis State Observer Design

The Frobenius TheoremState ObservabilityAnalysis and Design
Literature
Important References
1. A. Isidori, Nonlinear Control Systems - An Introduction, Springer-Verlag editions, 2ns ed, 1989, pp.217-226
2. A.J.Kerner, Normal Forms for linear and nonlinear systems, Contemp. Math. 68, 157-189, 1987
3. S.R.Kou, D.L.Eliot and T.J.Tarn, Observability of Nonlinear Systems, Information and Control 22(1),89-99, 1972
4. X.H. Xia, W.B. Gao, Nonlinear observer design by observer canonical forms, Int. J. contr. 47(4) 2988,1081-1100
5. B.Walcott et al., Comparative study of nonlinear state observation techniques, Int. J. Contr. 45(6) 1987,2109-32
6. F.Thau, Observing the state of nonlinear dynamic systems,Int. J. Contrl 17(3), 1973, 471-9
Sopasakis Pantelis State Observer Design