multi-agent testbed for emerging power systems mark stanovich, sanjeev srivastava, david a. cartes,...
TRANSCRIPT

Multi-Agent Testbed for Emerging Power Systems
Mark Stanovich, Sanjeev Srivastava, David A. Cartes, Troy Bevis

Outline
• Introduction• Testbed description• Example uses– Shipboard power system control– Characterization of data communication latencies
on control• Lessons learned• Future work• Conclusion

Emerging Power Systems
• More complex interactions• Frequent changes to the electrical
infrastructure• Distributed generation (e.g., renewables)• Decentralized and distributed• Cyber-physical– Data communications facilities– Computational resources

Multi-Agent Testbed
• Testbeds– Validation and verification– Feasibility studies– Derisking
• Conventional power system testbeds– Focused on centralized paradigm– Limited tools to program complex control algorithms
• Large amounts of time prototyping• Difficult to implement correctly

Requirements Driven Design• Support a variety of software
– Operating systems• E.g., Linux, Windows, Vx Works
– Applications and programming languages• E.g, Matlab, C++, Java, JADE
• Data communications– E.g., TCP/IP
• Cost effective• Portable
Versalogic “Mamba” SBCs (x86 Core 2 Duo processor)
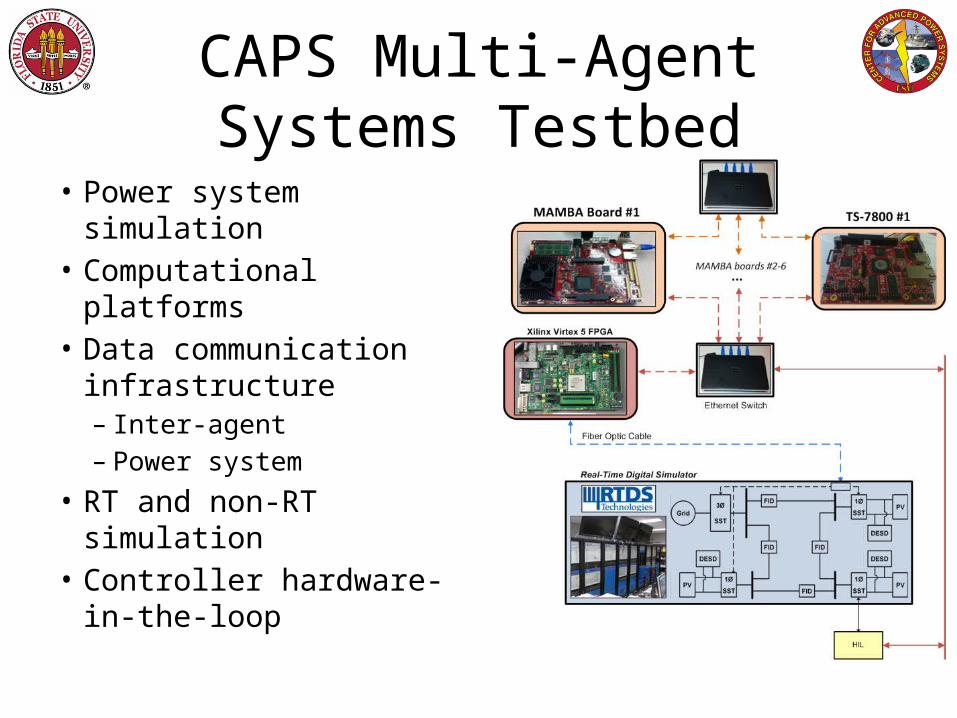
CAPS Multi-Agent Systems Testbed
• Power system simulation• Computational platforms• Data communication
infrastructure– Inter-agent– Power system
• RT and non-RT simulation• Controller hardware-in-
the-loop
Example Use Cases
• Shipboard control• Characterization of latency on controls

Distributed Control for Shipboard Power Systems
• Explore control capabilities for shipboard power systems
• Two-layer hierarchical control architecture– Intelligent agent modules interact to perform control
functionalities• Load shedding• Human machine interface• Enhance survivability by delivering power to needed loads
(mission critical) (triage) in both normal and adverse conditions
– Supervisory and zonal control– Demonstrates the loss and recovery of main generator

Shipboard Distributed Control
*Work by Qunying Shen

Implementation on Testbed
• Each layer on separate Mamba board– Logical representation expressed physically– Characteristic of actual implementation
• Java Agent DEvelopment Framework (JADE)– Facilities to simplify data communications
amongst agents– Easily configure agent to machine layout– Cross-platform (e.g., Windows, Linux)
• Electrical ship system on RTDS

Multi-agent System Layout
System PCON AgentMAMBA 4
Zonal PCON AgentMAMBA 5
Load AgentMAMBA 1
Zonal ESM AGENT
MAMBA 1
Main Gen 1 Agent
MAMBA 6
Aux Gen 1Agent
MAMBA 6
Aux Gen 2Agent
MAMBA 2
Main Gen 2Agent
MAMBA 2
System ESM Agent
MAMBA 6
Propulsion Agent 1
MAMBA 2
Propulsion Agent2
MAMBA 2
Pulse Load AgentMAMBA 5
HMIOperatorStatus
Control
Characterizing Latency Effects on Multi-Agent Control
• Use information theory to characterize the system
• Utilized case study to develop guidelines for applying information theory to energy systems
• Extracting timing requirements from characterization

Energy System Applications
• Previous Applications & Studies– PMU placement (state observation)– Multiagent communication (security) – Ship system reconfiguration (entropy rate)
• Possible Applications:– Extracting timing requirements from energy system– System control of large-scale renewable energy systems
with many DER, such as a smart grid– Quantifying information loss in distributed intelligent
control systems
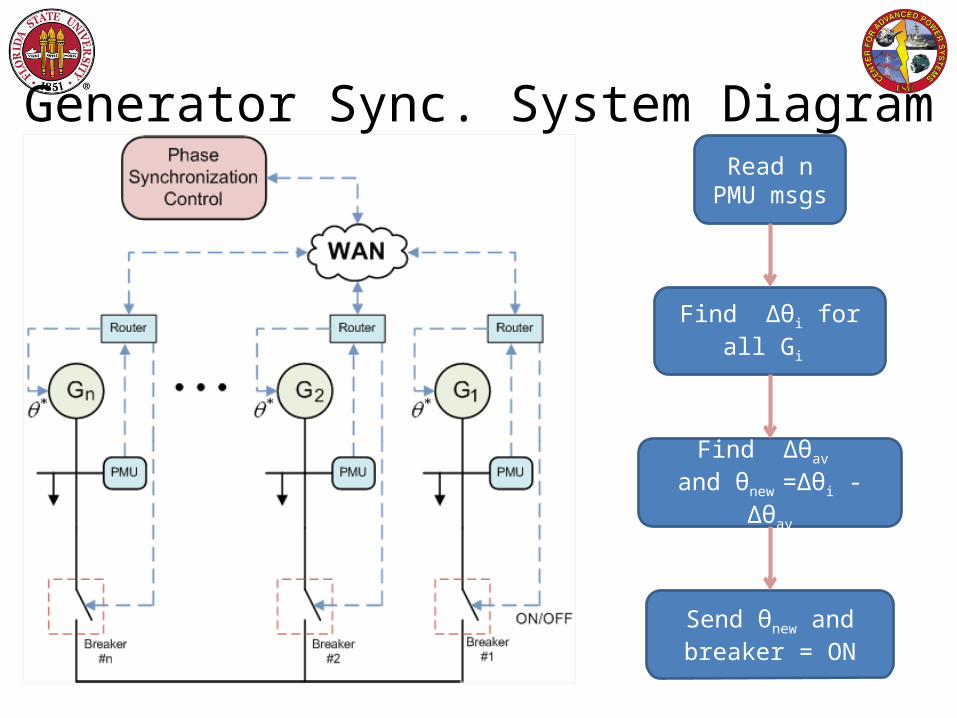
Generator Sync. System Diagram Read n PMU
msgs
Find Δθi for all Gi
Find Δθav and θnew =Δθi - Δθav
Send θnew and breaker = ON

Implementation on Testbed
• Implement on separate Mamba– Local generator controls– Supervisor control
• Intermediate Mamba to introduce communication variabilities
• RTDS– Electrical and low-level generator controls
Lessons Learned
• Need for automation– Artifacts from one experiment to the next– Less error prone– Time consuming to manually setup testbed for
various configurations– “Wiring” for electrical connections (interface to
power systems simulator)• Benefits of real-time simulation

Lessons Learned
• Multiple computational facilities– General purpose• High and low performance
– FPGA– PLC
• Data communications simulation– Topologies– Communication technologies (e.g., wireless, fiber-
optic)

Conclusion
• Testbed has been useful– Demonstrations– Study cyber-physical interactions– Quick prototyping– Simulate existing/planned systems
• Design decisions• Composing systems
• Improvements– Increase diversity of agent hosts– More advanced automated setup– Data communication simulation

Acknowledgement
This work was partially supported by the National Science Foundation (NSF) under Award Number EEC-0812121 and the Office of Naval Research Contract #N00014-09-C-0144.