Download - Algebra Liniara CTI
Capitolul 1
SPATII LINIARE
1.1 Structuri algebrice
(recapitulare)
1.1.1 Grupuri
Definitia 1.1 Fie X o multime nevida. O functie f definita pe X×X si cu valori ın X senumeste lege de compozitie interna ın X.
Notam, pentru ∀(x, y) ∈ X2, f(x, y) = x ◦ y si se citeste x compus cu y dupa legea ◦.Legile de compozitie interne pot avea urmatoarele proprietati:
Definitia 1.1 O lege de compozitie interna ” ◦ ” ın X se numeste lege asociativa daca∀(x, y, z) ∈ X3 avem:
(x ◦ y) ◦ z = x ◦ (y ◦ z).
Definitia 1.2 O lege de compozitie interna ”◦” ın X se numeste lege cu element neutrudaca ∃e ∈ X astfel ıncat ∀x ∈ X avem: x ◦ e = e ◦ x = x. Elementul e se numeste elementneutru a legii ”◦”.
Teorema 1.1 (de unicitate a elementului neutru) Fie X o multime si ” ◦ ” o lege decompozitie interna ın X. Daca ” ◦ ” admite un element neutru atunci acesta este unic.
Definitia 1.3 Daca o lege de compozitie interna ” ◦ ” ın X admite un element neutru eatunci spunem ca unui element x ∈ X ıi corespunde un element numit element simetricın raport cu legea ” ◦ ” daca exista x ∈ X astfel ıncat
x ◦ x = x ◦ x = e. (1.1)
Teorema 1.2 (de unicitate a elementului simetric) Fie X o multime si ” ◦ ” o legede compozitie interna ın X asociativa cu elementul neutru e. Daca un element x ∈ X areun element simetric ın raport cu legea ” ◦ ”, atunci acest element simetric este unic.
1

2 CAPITOLUL 1. SPATII LINIARE
Definitia 1.4 O lege de compozitie interna ” ◦ ” ın X se numeste lege comutativa daca∀(x, y) ∈ X2 avem x ◦ y = y ◦ x.
Definitia 1.5 Fie X o multime si ”◦” o lege de compozitie interna ın X. Perechea ordonata(X, ◦) se numeste semigrup daca legea ” ◦ ” este asociativa.
Definitia 1.6 Semigrupul (X, ◦) se numestemonoid daca legea ”◦” are si element neutru.
Definitia 1.7 Monoidul (X, ◦) se numeste grup daca legea ”◦” daca orice element din Xare simetric ın raport cu legea ”◦”. Un grup (X, ◦) se numeste grup comutativ (abelian)daca legea ” ◦ ” este comutativa.
Observatia 1.1 Daca (X, ◦) este un grup si notam legea ” ◦ ” cu simbolul “ + ”, atuncigrupul (X, +) se numeste grup aditiv, legea ” + ” se numeste adunarea elementelordin X, elementul sau neutru se numeste zero si se noteaza 0, iar simetricul unuielement x ∈ X, se numeste opusul elementului x ın raport cu adunarea ın X, si senoteaza (−x). ın grupul aditiv (X, +) notam x− y ın loc de x+ (−y).
Observatia 1.2 Daca (X, ◦) este un grup si notam legea ”◦” cu simbolul ”·”, atunci grupul(X, ·) se numeste grup multiplicativ, legea ” · ” se numeste ınmultire a elementelor dinX, elementul sau neutru se numeste unitate si se noteaza 1, iar simetricul unuielement x ∈ X, se numeste inversul elementului x ın raport cu ınmultirea ın X, si senoteaza x−1.
1.1.2 Morfisme de grupuri
Definitia 1.8 Fie (X,◦) si (Y, ) doua grupuri. Aplicatia f : X→ Y se numeste morfismde grupuri daca satisface conditia:
∀x, y ∈ X : f(x ◦ y) = f(x) f(y).
Daca morfismul f este injectiv (respectiv surjectiv) atunci el se numestemonomorfism(respectiv epimorfism) de grupuri. Daca morfismul f este bijectie atunci grupurile (X,◦)si (Y, ) se numesc izomorfe iar f : X→ Y este un izomorfism. Daca X ≡ Y si ◦ ≡atunci orice izomorfism f se numeste automorfism.
Observatia 1.3 Izomorfismul a doua grupuri identifica un grup cu altul si astfel din punctde vedere algebric este suficient sa se studieze unul din ele. Un morfism nu are aceastaproprietate.

1.1. STRUCTURI ALGEBRICE 3
1.1.3 Inele si corpuri
Definitia 1.9 Daca ” ∗ ” si ” ◦ ” sunt doua legi de compozitie interne ın X, spunem calegea ”◦” este distributiva la stanga (respectiv la dreapta) ın raport cu lugea ”∗” daca∀(x, y, z) ∈ X3 avem x ◦ (y ∗ z) = (x ◦ y) ∗ (x ◦ z) (respectiv (x ∗ y) ◦ z = (x ◦ z) ∗ (y ◦ z)).In cazul ın care legea ” ◦ ” este distributiva la stanga si la dreapta ın raport cu legea ” ∗ ”spunem ca legea ” ◦ ” este dublu distributiva ın raport cu legea ” ∗ ”.
Definitia 1.10 Fie (X,+, ·) o terna ordonata unde X este o multime, ”+” este operatia deadunare ın X, iar ” · ” este operatia de ınmultire ın X. Terna ordonata (X,+, ·) se numesteinel daca (X,+) este grup comutativ aditiv, iar ınmultirea este asociativa ((X,·)este semigrup) si dublu distributiva ın raport cu adunarea.
Definitia 1.11 Un inel (X,+, ·) se numeste inel cu unitate daca ınmultirea are unitate.Un inel (X,+, ·) se numeste inel cu comutativ daca ınmultirea este comutativa.
Exemplul 1.1 Multimea Z a numerelor ıntregi ınzestrata cu operatiile de adunare siınmultire este un inel comutativ cu element unitate.
Intr-un inel (X,+, ·) elementul neutru fata de legea + se noteaza cu 0X sau, cand nu suntposibile confuzii, se noteaza cu 0. De asemenea elementul neutru fata de legea multiplicativase noteaza cu 1X sau, cand nu sunt posibile confuzii, se noteaza cu 1.Este usor de demonstrat ca ın orice inel (X,+, ·),a = 0⇒ a · b = 0,∀b ∈ Xb = 0⇒ a · b = 0,∀a ∈ X,
dar nu ıntotdeauna a · b = 0⇒ a = 0 sau b = 0. De exemplu ın inelul (M2(Z),+, ·) avem:µ1 00 0
¶µ0 01 2
¶=
µ0 00 0
¶.
Definitia 1.12 Daca ıntr-un inel exista a 6= 0, b 6= 0, astfel ıncat a · b = 0 se spune ca asi b sunt divizori ai lui zero si ca inelul admite divizori ai lui zero. Orice inel care nuadmite divizori ai lui zero se numeste inel integru. Daca un inel integru este comutativsi cu element unitate, el se numeste domeniu de integritate.
Definitia 1.13 Un inel (X,+, ·) se numeste corp daca (X,+, ·) este inel cu unitate si oriceelement din X, diferit de zeroul adunarii, are invers ın aport cu legea ·.
Definitia 1.14 Un corp (X,+, ·) se numeste corp comutativ sau camp daca ınmultireaeste comutativa.
Observatia 1.4 Daca (X,+, ·) este un corp, notam xy−1 =x
y, x ∈ X, y ∈ X, y 6= 0.
Teorema 1.3 Corpurile nu au divizori ai lui zero. Orice corp comutativ este un domeniude integritate.

4 CAPITOLUL 1. SPATII LINIARE
1.1.4 Morfisme de corpuri
Definitia 1.15 Fie (X,+, ·) si (Y,⊕,¯) doua corpuri. Aplicatia f : X → Y se numestemorfism de corpuri daca satisface relatiile:
f(x+ y) = f(x)⊕ f(y)∀x, y ∈ X,f(x • y) = f(x)¯ f(y)∀x, y ∈ X.
Daca ın plus, f este bijectie, corpurile se numesc izomorfe iar f este un izomorfism.
1.2 Spatii liniare
In acest capitol sunt studiate proprietati matematice ale unei multimi de elemente careformeaza un spatiu liniar sau vectorial. Elementele acestui spatiu pot fi entitati de naturacu totul diferita: forte, viteze, semnale electrice, vectori geometrici, solutii ale unor ecuatiidiferentiale etc. In ciuda acestei diversitati vom descrie spatiul vectorial ın mod abstract,adica printr-o multime de elemente lipsita de orice atribut fizic.O componenta importanta a notiunii de spatiu liniar este notiunea de corp. Vom utiliza
corpurile numerelor reale R si numerelor complexe C. Fie K un corp comutativ (care poatefi R sau C) ale carui elemente sunt numite scalari.
Definitia 1.16 Fie (K,+, ·) un corp comutativ cu elementul unitate notat 1 si elementulnul notat 0. Fie X 6= ∅ este o multime, pe care se definesc doua legi de compozitie:- ⊕ o lege interna aditiva,
⊕ : X×X→ X : ∀x,y ∈ X, (x, y)→ x⊕ y ∈ X,
- ¯ o lege externa multiplicativa,
¯ : K× X→ X : ∀α ∈ K,x ∈X, (α,x)→ α¯ x ∈ X.
Cuaterna ordonata (X,⊕,¯,K) se numeste spatiu liniar (vectorial) peste campul K (sauK−spatiu liniar) daca (X,⊕) este grup comutativ adica
G1. ∀x,y, z ∈ X : x⊕ (y⊕ z) = (x⊕ y)⊕ z,G2. Exista ın X un vector notat θX (vectorul θX se numeste vectorul nul al lui X), astfel
ıncat oricare ar fi x ∈ X :x⊕ θX = θX⊕x = x,G3. ∀x ∈ X exista un vector notat cu −x (vectorul −x se numeste opusul vectorului
x) :x⊕ (−x) = (−x)⊕ x = θX,G4. ∀x,y ∈ X⇒x⊕ y = y⊕ x,si sunt satisfacute axiomeleSL1. ∀α, β ∈ K,x ∈X : α¯ (β ¯ x) = (α · β)¯ xSL2. ∀α, β ∈ K,x ∈X : (α+ β)¯ x = (α¯ x)⊕ (β ¯ x)SL3. ∀α ∈ K,x,y ∈X : α¯ (x⊕ y) = (α¯ x)⊕ (α¯ y)SL4. ∀x ∈ X : 1¯ x = x, unde 1 este elementul neutru pentru operatia · din K.

1.2. SPATII LINIARE 5
Elementele multimii X se numesc vectori (vom nota vectorii cu litere mici bold).
Exemplul 1.2 X = {θX} , constand dintr-un singur vector, vectorul nul, este un K−spatiuliniar, peste orice camp K, numit spatiu vectorial nul.
Exemplul 1.3 Spatiul liniar aritmetic Kn. Fie (K,+, ·) un corp comutativ si n ∈ N, n ≥1. Consideram produsul cartezianKn = K× · · · ×K, Kn = {x|x = (x1, . . . , xn), xi ∈ K, i = 1, n}.Pe Kn definim operatiile∀(x,y) ∈ Kn×Kn,x⊕ y = (x1, . . . , xn)+(y1, . . . , yn) = (x1+y1, . . . , xn+yn) (adunarea
pe componente)si∀(α,x) ∈ K × Kn, α ¯ x = (α · x1, . . . , α · xn) (ınmultirea cu un scalar a fiecarei
componente).Folosind cele doua operatii si proprietatile campului K se verifica axiomele spatiului
liniar. (Kn,⊕,¯,K) se numeste spatiu liniar aritmetic.In particular, daca consideram K = R atunci (Rn,+, ·,R) se numeste spatiu liniar
aritmetic real, iar daca consideram K = C atunci (Cn,+, ·,C) se numeste spatiu liniararitmetic complex.¨Pentru n = 1 obtinem (K,+, · K) spatiu liniar. Putem vorbi deci despre spatiul liniar
real al numerelor reale si de spatiu liniar complex al numerelor complexe.
Exemplul 1.4 Analog definim spatiul Kn = {x|x =
⎛⎜⎝ x1...xn
⎞⎟⎠ , xi ∈ K, i = 1, n}.¨
Teorema 1.4 (Consecinte ale definitiei spatiului liniar) Daca (X,+, ·,K) este unspatiu liniar, atuncia) ∀x ∈ X : 0¯x = θX;b) ∀α ∈ K : α¯θX = θX;c) ∀x ∈ X : (−1)¯x = −x;d) ∀α ∈ K,x ∈X : α¯x = θX ⇒ α = 0 sau x = θX;e) ∀α, β ∈ K,x ∈(X \ {θX}) : α¯x = β¯x⇒ α = βf) ∀α ∈ (K \ {0}),x,y ∈X : α¯x = α¯y⇒ x = y
Demonstratie.a) ∀x ∈ X : 0¯x = (0 + 0)¯x = 0¯x⊕ 0¯x⇒ 0¯x = θX.b) ∀α ∈ K, α¯θX = α¯(θX ⊕ θX) = α¯θX ⊕ α¯θX ⇒ α¯θX = θX.c) ∀x ∈ X : x⊕ (−1)¯x = 1¯x⊕ (−1)¯x = ((1 + (−1))¯x = 0¯x = θX ⇒ (−1)¯x = −xd) daca α 6= 0 ⇒ ∃α−1 ∈ K ⇒ α¯x = θX ⇒ α−1¯(α¯x) = α−1¯θX ⇒ (α−1 · α)¯x =θX ⇒ 1¯x = θX ⇒ x = θXe) ∀α, β ∈ K,x ∈(X \ {θX}) : α¯x = β¯x⇒ (α+ (−β))¯x = θX, x 6= θX ⇒ α = βf) ∀α ∈ (K\{0}),x,y ∈X : α¯x = α¯y⇒ α¯x⊕(−α)¯y = θX ⇒ α¯x⊕α¯(−y) = θX ⇒α · (x⊕ (− y)) = θX, α 6= 0⇒ x = y.¥

6 CAPITOLUL 1. SPATII LINIARE
Consecinta 1.1 a) ∀α ∈ K,x ∈X : −α¯x = (−α)¯x = α¯(−x),(−α)¯x⊕ α¯x = (−α+ α)¯x = 0¯x = θX ⇒ (−α)¯x = −α¯x;b)∀α, β ∈ K,x ∈X : (α− β)¯x = α¯x⊕ (−β)¯x = α¯x− β¯x;c) ∀α ∈ K,x,y ∈ X : α¯(x− y) = α¯(x⊕ (−y)) = α¯x⊕ α¯(−y) = α¯x− α¯y.¥
Observatia 1.5 In cele ce urmeaza nu vom mai face ın scriere distinctie ıntre + si ⊕, lafel ıntre · si ⊕, dar vom tine seama de semnificatia lor pe multimile K si X.
1.3 Subspatii liniare
Definitia 1.17 Fie (X,+, ·,K) un spatiu liniar. O submultime V,V 6= ∅, a multimii X senumeste subspatiu liniar al spatiului X daca (V,+, ·,K) este un spatiu liniar.Teorema 1.5 (Teorema de caracterizare a subspatiilor liniare) Fie (X,+, ·,K) unspatiu liniar. Conditia necesara si suficienta ca o submultime V a multimii X sa fie unsubspatiu liniar a spatiului X este:
∀x,y ∈ V : x+ y ∈ V, (1.2)
∀α ∈ K,x ∈V : α · x ∈ V. (1.3)
Demonstratie. Necesitatea. Presupunem ca V este un spatiu liniar. Rezulta ca esteınchis ın raport cu operatia aditiva definita pe X, deci are loc relatia (1.2); ınmultirea cuscalari este o operatie externa ın raport cu K, peste tot definita pe X, deci are loc relatia(1.3).Suficienta. Presupunem (1.2) si (1.3) ındeplinite, ceea ce ınseamna ca V este ınchis ın
raport cu operatiile de adunare a elementelor lui si de multiplicare la stanga cu elemente dincorpul de scalari. Proprietatile de asociativitate si axiomele SL1, SL2, SL3, SL4 sunt satis-facute pe X, deci cu atat mai mult sunt satisfacute pe V ⊂ X. Demonstram ca ∀x ∈ V⇒−x ∈ V si θX ∈ V. Pentru ∀x ∈ V, considerand ın (1.3) α = −1 rezulta (−1) ·x = −x ∈ V;utilizand (1.2) cu y = −x obtinem x+ (−x) = θX ∈ V.¥Observatia 1.6 Relatiile (1.2) si (1.3) pot fi ınlocuite printr-o singura relatie de forma
∀(α,x,y) ∈ K×V2 : α · x+ y ∈ V. (1.4)
Exemplul 1.5 Fie (X,+, ·,K) este un spatiu liniar. Multimile V = {θX} si X suntsubspatii liniare ale lui X. Ele se numesc subspatii improprii. Orice alt subspatiu alui X se numeste subspatiu propriu.Exemplul 1.6 Consideram spatiul liniar aritmetic Kn si fie multimeaV = {(0, x2, . . . , xn), xi ∈ K, i = 2, n} ⊂ Kn.
Observam ca ∀(α, (0, x2, . . . , xn), (0, y2, . . . , yn)) ∈ K×V2 : α(0, x2, . . . , xn)+(0, y2, . . . , yn) =(0, αx2+y2, . . . , αxn+yn) ∈ V. Rezulta ca V este un subspatiu liniar coform relatiei (1.4).Exemplul 1.7 Consideram submultimea W = {(1, x2, . . . , xn), xi ∈ K, i = 2, n} ⊂ Kn.Observam ca ∀((1, x2, . . . , xn), (1, y2, . . . , yn)) ∈ W2 : (1, x2, . . . , xn) + (1, y2, . . . , yn) =(2, x2 + y2, . . . , xn + yn) /∈W, deci W nu este subspatiu liniar al spatiului Kn.

1.4. SUBSPATIU GENERAT DE UN SISTEM DE VECTORI 7
1.3.1 Operatii cu subspatii liniare
Definitia 1.18 Fie V1,V2 doua subspatii ale spatiului liniar (X,+, ·,K). Definim
V1\V2 = {v | v ∈ V1 si v ∈ V2}
V1[V2 = {v | ∃i ∈ {1, 2} : v ∈ Vi}
Teorema 1.6 Fie Fie V1,V2 doua subspatii ale spatiului liniar (X,+, ·,K). IntersectiaV1TV2 este un subspatiu liniar al spatiului liniar X.
Demonstratie.Observam ca V1
TV2 6= ∅ deoarece θX ∈ Vi,∀i ∈ {1, 2} ⇒ θX ∈ V1
TV2. Pentru
∀α ∈ K si ∀x,y ∈ V1TV2, rezulta x + y ∈ Vi,∀i ∈ {1, 2} si deci x + y ∈ V1
TV2. De
asemenea αx ∈ Vi,∀i ∈ {1, 2} si deci αx ∈ V1TV2.Rezulta, conform Teoremei 1.5 de
caracterizare a subspatiilor liniare, ca V1TV2 este un subspatiu liniar.¥
Observatia 1.7 Reuniunea unui sistem de subspatii liniare nu este, ın general, un subspatiuliniar. Ca exemplu consideram V1 = {(x1, 0) | (x1, 0) ∈ R2} , V2 = {(0, x2) | (0, x2) ∈ R2} .Daca consideram u = (1, 0) ∈ V1 si v = (0, 1) ∈ V2, u,v ∈ V1 ∪V2, dar u+ v /∈ V1 ∪ V2.
Definitia 1.19 Fie V1 si V2 doua subspatii ale spatiului liniar (X,+, ·,K). Se numestesuma subspatiilor V1 si V2 multimea V definita prin
V = V1 +V2 = {v ∈ X | ∃v1 ∈ V1,v2 ∈ V2 : v = v1 + v2} .
Teorema 1.7 Suma subspatiilor V1 si V2 ale spatiului liniar (X,+, ·,K), notata V, este unsubspatiu liniar al lui X.
Demonstratie. Observam ca V 6= ∅ deoarece θX + θX ∈ V.Fie α ∈ K si (u,v) ∈ V2 astfel ıncat u = u1+u2,v = v1+ v2,u1,v1 ∈ V1, u2,v2 ∈ V2,
α · u+ v = α · (u1 + u2) + (v1 + v2) = (α · u1 + v1) + (α · u2 + v2).Dar V1, V2 sunt subspatii liniare rezulta α ·u1+v1 ∈ V1, α ·u2+v2 ∈ V2 ⇒ α ·u+v ∈ V
si deci, conform relatiei (1.4),V este subspatiu liniar.¥
Definitia 1.2 Fie V1,V2 doua subspatii ale spatiului liniar (X,+, ·,K). Daca V = V1+V2si V1 ∩ V2 = {θX} atunci V se numeste suma directa a subspatiilor V1,V2 si se noteazaV = V1
LV2.
1.4 Subspatiu generat de un sistem de vectori
Definitia 1.3 Daca f : I → X este o functie definita pe o multime de indici I si cu valoriıntr-o multime X si daca f(i) = xi, i ∈ I, atunci notam f prin (xi)i∈I pe care-l numimsistem de elemente din X.

8 CAPITOLUL 1. SPATII LINIARE
Fie (X,+, ·,K) este un spatiu liniar S = (vi)i=1,n un sistem de vectori din X.
Definitia 1.20 Spunem ca un vector v ∈ X este o combinatie liniara a sistemului devectori S daca exista (α1, . . . , αn) ∈ Kn astfel ıncat
v = α1 · v1 + . . .+ αn · vn =nXi=1
αi · vi.
Exemplul 1.8 In spatiul liniar F(R,R) al functiilor definite pe R cu valori ın R consideramsistemul de functii (f0(x) = 1, f1(x) = x, . . . , fn(x) = xn). Orice functie polinomialade grad mai mic sau egal cu n poate fi scrisa ca o combinatie liniara de aceste functii,
p(x) =nXi=0
αifi(x) =nXi=0
αixi ın care unii din coeficienti αi, i = 0, n pot fi nuli. In schimb
functia f(x) = ex nu poate fi scrisa ca o combinatie liniara de aceleasi functii.¨
Fie S = (vi)i=1,n un sistem de vectori din X. Notam cu [S] multimea tuturor combinati-ilor liniare de vectori ai sistemului S,
[S] =
(v ∈ X ; ∃(α1, . . . , αn) ∈ Kn : v =
nXi=1
αi · vi
).
Teorema 1.8 Multimea [S] ⊂ X este un subspatiu liniar al lui X.
Demonstratie. Daca λ ∈ K, u, v ∈ [S] , ∃(α1, . . . , αn) ∈ Kn : u =nXi=1
αi·vi si ∃(β1, . . . , βn) ∈
Kn :
v =nXi=1
βi · vi ⇒ λ · u+ v = λ ·nXi=1
αi · vi +nXi=1
βi · vi =nXi=1
[(λ · αi) · vi + βi · vi] =
=nXi=1
(λ · αi + βi) · vi ∈ [S] .¥
Definitia 1.21 Subspatiul [S] , multimea tuturor combinatiilor liniare de vectori ai sistemu-lui S, se numeste subspatiul generat de vectorii sistemului S.
Definitia 1.22 Un sistem de vectori din X, S = (vi)i=1,n se numeste sistem de gener-
atori pentru X daca subspatiul generat de S coincide cu X, adica [S] = X. In acest cazspunem ca S genereaza pe X.
Definitia 1.23 Un K-spatiu liniar X se numeste finit generat daca pentru X exista unsistem finit de generatori.
In cadrul acestui curs ne vom ocupa numai de spatii finit generate.

1.5. DEPENDENTA SI INDEPENDENTA LINIARA 9
1.5 Dependenta si independenta liniara
Definitia 1.24 Un sistem de vectori din X, S = (vi)i=1,n se numeste sistem liniar de-pendent (vectorii v1, . . . ,vn se numesc liniar dependenti) daca exista (α1, α2, . . . , αn) ∈Kn, (α1, . . . , αn) 6= θKn astfel ıncat
α1 · v1 + α2 · v2 + . . .+ αn · vn = θX.
In caz contrar sistemul de vectori S se numeste sistem liniar independent (vectoriiv1, . . . ,vn se numesc liniar independenti).
Observatia 1.8 Din definitie rezulta ca sistemul de vectori S este liniar independent dacasi numai daca ∀(α1, . . . , αn) ∈ Kn : α1 ·v1+α2 ·v2+. . .+αn ·vn = θX ⇔ (α1, . . . , αn) = θKn.
Observatia 1.8 este utilizata ın practica pentru a verifica daca un sistem de vectori esteliniar independent.
Exercitiul 1.1 Vectorii v1 = (1, 0, 0),v2 = (0, 1, 0),v3 = (0, 0, 1) din R3 sunt liniar inde-pendenti deoarece
α1v1+α2v2+α3v3 = θR3 ⇔ α1(1, 0, 0)+α2(0, 1, 0)+α3(0, 0, 1) = θR3 ⇔ (α1, α2, α3) =(0, 0, 0)⇔ α1 = α2 = α3 = 0.¨
Exercitiul 1.2 Vectorii v1 = (1, 2,−1),v2 = (2,−1, 0),v3 = (4, 3,−2) din R3 sunt liniardependenti deoarece
α1v1 + α2v2 + α3v3 = θR3 ⇔ α1(1, 2,−1) + α2(2,−1, 0) + α3(4, 3,−2) = θR3 ⇔( α1 + 2α2 + 4α3, 2 α1 − α2 + 3α3,− α1 − 2α3) = (0, 0, 0)⇔⎧⎨⎩ α1 + 2α2 + 4α3 = 0
2α1 − α2 + 3α3 = 0−α1 − 2α3 = 0
. (1.5)
Sistemul (1.5), care este un sistem liniar omogen, are solutii diferite de solutiabanala daca si numai daca determinantul sistemului este zero. Se verifica prin
calcul ca
¯¯ 1 2 42 −1 3−1 0 −2
¯¯= 0, deci vectorii sunt liniar dependenti.¨
Exemplul 1.9 Sistemul format numai din vectorul nul, (θX) este liniar dependent deoare-ce avem 1 · θX = θX, iar sistemul format dintr-un singur vector nenul, v 6= θX esteliniar independent deoarece α · v = θX, α 6= 0⇒ v = θX.¨
Teorema 1.9 (Teorema de caracterizare a dependentei liniare) Conditia nece-sara si suficienta ca un sistem de vectori din X, S = (vi)i=1,n sa fie liniar dependent esteca cel putin unul din vectori sa se poata exprima ca o combinatie liniara de ceilalti vectori.

10 CAPITOLUL 1. SPATII LINIARE
Demonstratie. Necesitatea. Presupunem ca sistemul de vectori S = (vi)i=1,n este liniardependent. Rezulta ca exista (α1, α2, . . . , αn) ∈ Kn, (α1, α2, . . . , αn) 6= θKn, astfel ıncatα1 · v1 + α2 · v2 + . . .+ αn · vn = θX .
Presupunem, de exemplu, αj 6= 0, j ∈ {1, 2, . . . , n} . Atunciαj · vj = −α1 · v1 − . . .− αj−1 · vj−1 − αj+1 · vj+1 − . . .− αn · vn, αj 6= 0⇒ ∃α−1j ⇒vj = −α−1j · α1 · v1 − . . .− α−1j · αj−1 · vj−1 − α−1j · αj+1 · vj+1 − . . .− α−1j · αn · vn
adica vj este o combinatie liniara de ceilalti vectori ai sistemului.
Suficienta. Daca vj este o combinatie liniara de ceilalti vectori ai sistemului S atunciexista (β1, . . . βj−1, βj+1, . . . , βn) ∈ Kn−1
vj = β1 · v1 + . . .+ βj−1 · vj−1 + βj+1 · vj+1 + . . .+ βn · vn ⇔β1 · v1 + . . .+ βj−1 · vj−1 − vj + βj+1 · vj+1 + . . .+ βn · vn = θX.
Notam αk = βk, k = 1, n, k 6= j, αj = −1 6= 0, (α1, α2, . . . , αn) 6= θKn, rezulta ca vectoriisistemului S sunt liniar dependenti.¥
Consecinta 1.2 Orice sistem de vectori care contine vectorul nul este liniar dependent.
1.6 Baza si dimensiune
Definitia 1.25 Un sistem de vectori S = (ei)i=1,n din X se numeste baza ın K-spatiulliniar X daca satisface conditiile:a) S este un sistem de vectori liniari independenti;
b) S este un sistem de generatori pentru K-spatiul liniar X.
Exemplul 1.10 In spatiul liniar Kn consideram sistemul de vectori S = (ei)i=1,n unde
e1 = (1, 0, . . . , 0) , e2 = (0, 1, 0, . . . , 0) , . . . , en = (0, 0, . . . , 0, 1) . (1.6)
Din orice relatie de forma α1e1 + α2e2 + . . . + αnen = θX rezulta αi = 0,∀i = 1, n decisistemul de vectori S = (ei)i=1,n este liniar independent.
Pe de alta parte, pentru orice x = (x1, x2, . . . , xn) ∈ Kn avem x = x1 (1, 0, . . . , 0) +x2 (0, 1, 0, . . . , 0) + . . . + xn (0, 0, . . . , 0, 1) = x1e1 + x2e2 + . . . + xnen, adica sistemul devectori S = (ei)i=1,n este un sistem de generatori pentru Kn.
Sistemul de vectori S = (ei)i=1,n definit de (1.6) se numeste baza canonica (baza nat-urala) din Kn.¨
Teorema 1.10 (Teorema de caracterizare a bazelor) Conditia necesara si suficientaca un sistem de vectori S = (ei)i=1,n din X sa fie o baza ın K-spatiul liniar X este ca oricevector din X sa se exprime ın mod unic ca o combinatie liniara de vectori din S, adica
∀x ∈ X,∃∗(α1, α2, . . . , αn) ∈ Kn : x = α1e1 + α2e2 + . . .+ αnen. (1.7)

1.6. BAZA SI DIMENSIUNE 11
Demonstratie. Necesitatea. Presupunem ca sistemul de vectori S = (ei)i=1,n este o bazaın K-spatiul liniar X. Deoarece [S] = X rezulta ca∀x ∈ X,∃(α1, α2, . . . , αn) ∈ Kn : x = α1 · e1 + α2 · e2 + . . .+ αn · en.Demonstram ca descompunerea este unica prin reducere la absurd. Presupunem ca mai
exista o descompunere a lui x.
∃(β1, . . . , βn) ∈ Kn, (β1, . . . , βn) 6= (α1, . . . , αn):x = β1 · e1+ β2 · e2+ . . .+ βn · en. Prinscadere obtinem
(α1 − β1) · e1 + (α2 − β2) · e2 + . . .+ (αn − βn) · en = θX.Dar sistemul de vectori (ei)i=1,n este liniar independent rezulta αk = βk, k = 1, n, deci
unicitatea scrierii.
Suficienta. Presupunem ca∀x ∈ X,∃∗(α1, α2, . . . , αn) ∈ Kn : x = α1e1 + α2e2 + . . .+ αnen.De aici rezulta ca S este un sistem de generatori pentru X. Demonstram ca vectorii
sistemului S sunt liniar independenti. Pentru aceasta consideram o relatie de formaα1 · e1 + α2 · e2 + . . .+ αn · en = θX
care constituie o descompunere a vectorului θX dupa vectorii sistemului S. Pe de alta parteavem si urmatoarea descompunere a vectorului θX dupa vectorii sistemului S de forma:
θX = 0 · e1 + 0 · e2 + . . .+ 0 · en.Cum descompunerea dupa vectorii din S este unica, rezulta αk = 0, k = 1, n, adica
sistemul de vectori S este liniar independent. Deci S este o baza.¥
Definitia 1.4 Scalarii care formeaza n-upla ordonata (α1, α2, . . . , αn) ∈ Kn din descom-punerea unica (1.7) a lui x ∈ X se numesc coordonatele vectorului x ın baza S.
Daca se alege o alta baza, coordonatele unui vector se vor schimba (vor fi diferite decele din prima baza).Teorema urmatoare demonstreaza ca ıntr-un spatiu finit dimensional toate bazele au
acelasi numar de vectori.
Teorema 1.11 Fie X un K-spatiul liniar si fie sistemul de vectori S = (ei)i=1,n o baza ınX. Au loc afirmatiile:a) Orice alta baza din X este formata din n elemente.b) Orice sistem de vectori liniar independent format din n elemente este o baza ın X.
Definitia 1.5 Fie X 6= {θX} un K-spatiu liniar finit generat. Numarul de vectori ai uneibaze a lui X se numeste dimensiunea spatiului X si se noteaza dimK X.
Teorema 1.12 (Teorema de completare a unui sistem de vectori liniar indepen-dent pana la o baza) Daca (ei)i=1,n este o baza ın Xn, sistemul liniar independent (wi)i=1,pse poate completa pana la o baza Xn adaugand n − p vectori din baza (ei)i=1,n astfel ıncatnoul sistem obtinut sa fie liniar independent. Completarea nu este unica.

12 CAPITOLUL 1. SPATII LINIARE
1.7 Schimbarea coordonatelor unui vector la schimba-
rea bazei
Consideram X un K-spatiu liniar de dimensiune n si doua baze apartinand acestui spatiu,B = (ei)i=1,n si B
0 = (e0i)i=1,n. Un vector oarecare u ∈ X se poate descompune ın raport cucele doua baze sub forma:∃ (α1, α2, . . . , αn) ∈ Kn astfel ıncat ın baza B vectorul u se poatescrie sub forma
u =nXi=1
αiei = (α1 α2 . . . αn)
⎛⎜⎜⎜⎝e1e2...en
⎞⎟⎟⎟⎠ , (1.8)
Fie (β1, β2, . . . , βn) ∈ Kn astfel ıncat ın baza B0 vectorul u se poate scrie sub forma
u =nX
j=1
βje0j = (β1 β2 . . . βn)
⎛⎜⎜⎜⎝e01e02...e0n
⎞⎟⎟⎟⎠ . (1.9)
Vectorii bazei B0 = (e0i)i=1,n se pot descompune ın raport cu vectorii bazei B dupa relatiile:
e0j = (a1j a2j . . . anj)
⎛⎜⎜⎜⎝e1e2...en
⎞⎟⎟⎟⎠ , j = 1, n. (1.10)
Inlocuind relatia (1.10) ın (1.9) rezulta
u = (β1 β2 . . . βn)
⎛⎜⎜⎜⎝a11 a21 · · · an1a12 a22 · · · an2...
......
...a1n a2n · · · ann
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝e1e2...en
⎞⎟⎟⎟⎠ .
Din unicitatea descompunerii unui vector dupa vectorii bazei (Teorema 1.10) rezulta
(α1 α2 . . . αn) = (β1 β2 . . . βn)
⎛⎜⎜⎜⎝a11 a21 · · · an1a12 a22 · · · an2...
......
...a1n a2n · · · ann
⎞⎟⎟⎟⎠sau, transpus, ⎛⎜⎜⎜⎝
α1α2...αn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎝a11 a12 · · · a1na21 a22 · · · a2n· · · · · · · · · · · ·an1 an2 · · · ann
⎞⎟⎟⎠⎛⎜⎜⎜⎝
β1β2...βn
⎞⎟⎟⎟⎠ .

1.7. SCHIMBAREA COORDONATELOR UNUI VECTOR LA SCHIMBAREA BAZEI13
Daca notam matricea de trecere de la baza B la baza B0
A =
⎛⎜⎜⎝a11 a12 · · · a1na21 a22 · · · a2n· · · · · · · · · · · ·an1 an2 · · · ann
⎞⎟⎟⎠ ,
obtinem scrierea matriceala ⎛⎜⎜⎜⎝α1α2...αn
⎞⎟⎟⎟⎠= A⎛⎜⎜⎜⎝
β1β2...βn
⎞⎟⎟⎟⎠ (1.11)
Relatia (1.11) se numeste formula matriceala de schimbare a coordonatelor unuivector la o schimbare de baze.
Exercitiul 1.3 In R3 consideram baza canonica e1 =
⎛⎝ 100
⎞⎠ , e2 =
⎛⎝ 010
⎞⎠ , e3 =
⎛⎝ 001
⎞⎠si alta baza u1 =
⎛⎝ 100
⎞⎠ ,u2 =
⎛⎝ 110
⎞⎠ ,u3 =
⎛⎝ 111
⎞⎠ . Un vector oarecare x, dat prin x =⎛⎝ α1α2α3
⎞⎠ se scrie ın prima baza x = α1e1+α2e2+α3e3, iar ın a doua x = β1u1+β2u2+β3u3.
Deoarece u1 = e1, u2 = e1+ e2 si u3 = e1+ e2+ e3, matricea de trecere de baza de la baza
(e1, e2, e3) la baza (u1,u2,u3) este
⎛⎝ 1 1 10 1 10 0 1
⎞⎠ iar coordonatele vectorului x ın raport cu
baza (e1, e2, e3) ın functie de coordonatele vectorului ın raport cu baza (u1,u2,u3) suntdate de relatia⎛⎝ α1
α2α3
⎞⎠ =
⎛⎝ 1 1 10 1 10 0 1
⎞⎠⎛⎝ β1β2β3
⎞⎠ ¨
Definitia 1.26 Se numeste matricea schimbarii de baza sau matricea de trecerede la baza B la baza B0 matricea A a carei coloana j este formata din coordonatelevectorului e0j al bazei B
0 ın raport cu vectorii bazei B, j = 1, n.
Teorema 1.13 Matricea A de trecere de la baza B la baza B0 este inversabila.

14 CAPITOLUL 1. SPATII LINIARE
Demonstratie. Fie X un K-spatiu liniar de dimensiune n si doua baze B = (ei)i=1,n siB0 = (e0i)i=1,n. Exprimam vectorii bazei B cu ajutorul vectorilor bazei B0 :
ei = (b1i b2i . . . bni)
⎛⎜⎜⎜⎝e01e02...e0n
⎞⎟⎟⎟⎠ , i = 1, n. (1.12)
Tinand seama de relatiile (1.8), (1.12) si (1.9) obtinem
u = (α1 α2 . . . αn)
⎛⎜⎜⎜⎝b11 b21 · · · bn1b12 b22 · · · bn2...
......
...b1n b2n · · · bnn
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝e01e02...e0n
⎞⎟⎟⎟⎠ = (β1β2 . . . βn)
⎛⎜⎜⎜⎝e01e02...e0n
⎞⎟⎟⎟⎠de unde rezulta, daca notam cu B = (bij)i,j=1,n ,
(β1β2 . . . βn) = (α1 α2 . . . αn)BT ⇒ B
⎛⎜⎜⎜⎝α1α2...αn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝β1β2...βn
⎞⎟⎟⎟⎠Inlocuind ın relatia (1.11)⎛⎜⎜⎜⎝
α1α2...αn
⎞⎟⎟⎟⎠ = A
⎛⎜⎜⎜⎝β1β2...βn
⎞⎟⎟⎟⎠ = A ·B
⎛⎜⎜⎜⎝α1α2...αn
⎞⎟⎟⎟⎠⇒ B ·A = In
unde In = (δij)i,j=1,n , reprezenta matricea unitate de ordin n.Printr-un rationament analog, folosind relatiile (1.9),(1.10) si (1.8), obtinemA ·B = In,
deci matricea A este inversabila.O justificare mai simpla este urmatoarea: deoarece descompunerea dupa vectorii bazei
este unica, rezulta ca sistemul (1.11) are solutie unica pentru
⎛⎜⎜⎜⎝β1β2...βn
⎞⎟⎟⎟⎠ dati, deci det(A) 6= 0,adica matricea A este inversabila. ¥
Definitia 1.27 Doua baze B = {e1, e2, ..., en} si B0 = {e01, e02, ..., e0n} din spatiul vectorialXn, se numesc baze la fel orientate daca determinantul matricei schimbarii de baza de labaza B la B0 este pozitiv. Daca acest determinant este negativ, cele doua baze se numesccontrar orientate.
Capitolul 2
SPATII LINIARE EUCLIDIENE
Definitia 2.1 Fie (X,+, ·,R) un spatiu liniar. O functie:h·, ·i : X× X→ R se numeste produs scalar real ın X daca satisface conditiile:SP1) ∀(u,v,w) ∈ X3 : hu+ v,wi = hu,wi+ hv,wi,SP2) ∀(α,u,v) ∈ R× X2 : hα · u,vi = αhu,vi,SP3) ∀u,v ∈ X : hu,vi = hv,ui ,SP4) ∀u ∈ X : hu,ui ≥ 0 si hu,ui = 0⇔ u = θX.
Definitia 2.2 Fie (X,+, ·,R) un spatiu liniar. Perechea ordonata (X, h·, ·i) se numestespatiu liniar cu produs scalar real sau spatiu liniar euclidian.
Teorema 2.1 (Consecinte ale definitiei spatiului liniar euclidian)Daca (X, h·, ·i) este un spatiu liniar euclidian atunci au loc relatiile:SP5) ∀(u,v,w) ∈ X3 : hu,v +wi = hu,vi+ hu,wi,SP6) ∀(α,u,v) ∈ R× X2 : hu, α · vi = αhu, vi,SP7) ∀u ∈ X : hu,θXi = hθX,ui = 0,
Demonstratie.
S6) ∀(u,v,w) ∈ X3 : hu,v +wi SP3= hv +w,ui SP1= hv,ui+ hw,ui SP3= hu,vi+ hu,wi,S7) ∀(α,u,v) ∈ R×X2 : hu, α · vi SP3= hα · v,ui SP2= αhv,ui,S8) ın relatia SP2 consideram α = 0 si obtinem: ∀(u,v) ∈ X2, h0 · v,ui = 0 · hv,ui = 0
dar h0 · v,ui = hθX,ui de unde rezulta h0 · v,ui = hθX,ui. Analog se obtine cealaltarelatie.¥
Exemplul 2.1 Fie (Rn,+, ·,R), n ≥ 1 spatiul liniar aritmetic n−dimensional si aplicatiah·, ·i : Rn ×Rn→ R definita prin
∀(x,y) ∈ Rn × Rn,x = (x1, . . . , xn) ,y = (y1, . . . , yn) : hx,yi =nXi=1
xiyi.(2.1)
Demonstram ca aplicatia astfel definita satisface axiomele produsului scalar real.
15

16 CAPITOLUL 2. SPATII LINIARE EUCLIDIENE
SP1) ∀(x,y, z) ∈ (Rn)3 , x = (x1, . . . , xn) ,y = (y1, . . . , yn), z = (z1, . . . , zn) : hx+ y, zi =nPi=1
(xi + yi)zi =nPi=1
xiyi +nPi=1
xizi = hx, zi+ hy, zi.
SP2)∀(α,x,y) ∈ R× (Rn)2, x = (x1, . . . , xn) , y = (y1, . . . , yn) : hα·x,yi =nPi=1
(αxi)yi =
αnPi=1
xiyi = αhx,yi.
SP3) ∀(x,y) ∈ (Rn)2, x = (x1, . . . , xn) , y = (y1, . . . , yn) : hx,yi =nPi=1
xiyi =nPi=1
yixi =
hy,xi.SP4) ∀x ∈ Rn, x = (x1, . . . , xn) , hx,xi =
nPi=1
x2i ≥ 0.
∀x ∈ Rn, x = (x1, . . . , xn) , hx,xi = 0⇒nPi=1
x2i = 0⇒ xi = 0, ∀i = 1, n⇒ x = θRn .
Produsul scalar definit prin (2.1) se numeste produs scalar standard (sau canonic)iar (Rn, h·, ·i) este numit spatiul euclidian aritmetic canonic n−dimensional. Analogse defineste produsul scalar standard ın (Rn,+, ·,R).
Exemplul 2.2 Fie (C ([a, b] ,R) ,+, ·,R) spatiul liniar al functiilor reale continue pe inter-valul ınchis [a, b] ⊂ R, unde a < b. Aplicatia h·, ·i : C ([a, b] ,R)×C ([a, b] ,R)→ R definitaprin
∀(f, g) ∈ (C ([a, b] ,R))2 : hf, gi =bZ
a
f(x)g(x)dx (2.2)
este un produs scalar real, numit produs scalar canonic (standard) definit pe C ([a, b] ,R) ,iar (C ([a, b] ,R) , h·, ·i) are structura de spatiu liniar euclidian.
Definitia 2.3 Fie (X, h·, ·i) un spatiu liniar euclidian. Pentru orice vector v ∈ X definimlungimea (norma euclidiana) vectorului v, numarul real nenegativ:
kvk =phv,vi. (2.3)
Vectorul v cu proprietatea ca kvk = 1 se numeste versor sau vector unitar.
Observatia 2.1 Daca v 6= θX atunci vectorul◦v =
1
kvkv este versor si se numeste versorul
vectorului nenul v. Remarcam ca pentru orice v ∈ X,v 6= θX are loc relatia v = kvk◦v.
Exemplul 2.3 (Particularizari ale lungimii (normei) unui vector)In cazul spatiului euclidian aritmetic canonic n−dimensional (Rn, h·, ·i), cu produsul
scalar definit prin relatia (2.1), lungimea unui vector x este:
kxk =
vuut nXi=1
x2i .

17
In cazul spatiului liniar euclidian (C ([a, b] ,R) , h·, ·i) cu produsul scalar definit prinrelatia (2.2), lungimea unui vector f este:
kfk =
vuuut bZa
f2(x)dx.
Teorema 2.2 (Proprietati ale lungimii (normei) unui vector)Daca (X, h·, ·i) un spatiu liniar euclidian, atunci au loc relatiile:i)
∀u ∈ X : kuk = 0⇔ u = θX,
ii)∀(α,u) ∈ R×X : kα · uk =| α | kuk ,
iii)
∀(u,v) ∈ X2 :| hu,vi |≤ kuk kvk , (2.4)
numita inegalitatea Cauchy-Schwarz-Buniakowski. Egalitatea are loc daca si numaidaca vectorii (u,v) ∈ X2 sunt liniar dependenti.
iv)
∀(u,v) ∈ X2 :k u+ v k≤k u k + k v k, (2.5)
numita inegalitatea triunghiulara sau inegalitatea lui Minkowski.
Demonstratie. i) ∀u ∈ X, k u k= 0⇔ hu,ui = 0 SP4⇔ u = θX.ii) ∀(α,u) ∈ K×X : k α · u k=
phα · u, α · ui =
pααhu,ui =
pα2hu,ui =
= | α |k u k .iii) Inegalitatea este evident adevarata pentru u = θX sau v = θX. Presupunem u 6= θX
si v 6= θX. Atunci k u+α ·v k2= hu+α ·v,u+α ·vi = hu,ui+αhu,vi+αhv,ui+α2hv,vi,utilizand definitia si proprietatile produsului scalar. Deoarece k u + α · v k2≥ 0, ∀α ∈ R,rezulta α2hv,vi+2αhu,vi+ hu,ui ≥ 0, ∀α ∈ R, care poate fi privita ca o ecuatie de graduldoi care pastreaza semn constant oricare ar fi α real. Deci∆ = 4 (hu,vi2 − hv,vihu,ui) ≤ 0si obtinem |hu,vi| ≤
phu,ui
phv,vi, adica inegalitatea Cauchy-Schwarz-Buniakowski.
Egaliatea are loc ın cazurile:a) cel putin unul din vectori este θX, deci sistemul de vectori (u,v) este liniar dependent,b) u + αv = θX, relatie care ınseamna dependenta liniara. Reciproc, daca sistemul de
vectori (u,v) este liniar dependent, atunci exista λ ∈ R : v = λ · u si obtinem | hu,vi |=|λ |k u k2=k u kk v k .
iv) ∀(u,v) ∈ X2 : k u+ v k2= hu+ v,u+ vi = hu,ui + hu,vi + hv,ui + hv,vi =k u k2 +2hu,vi+ k v k2≤ k u k2 +2 | hu,vi | + k v k2≤ k u k2 +2 k u kk v k ++ k v k2≤ (k u k + k v k)2 , adica inegalitatea triunghiulara. Am avut ın vedere inegalita-tea hu,vi ≤ | hu,vi |. ¥

18 CAPITOLUL 2. SPATII LINIARE EUCLIDIENE
Exemplul 2.4 Particularizari ale inegalitatii Cauchy-Schwarz-Buniakowski.In cazul spatiului euclidian aritmetic canonic n−dimensional (Rn, h·, ·i) cu produsul
scalar definit prin relatia (2.1), inegalitatea (2.4) este de forma:
|nXi=1
xiyi |≤
vuut nXi=1
x2i
vuut nXi=1
y2i .
In cazul spatiului liniar euclidian (C ([a, b] ,R) , h·, ·i) cu produsul scalar definit prinrelatia (2.2), inegalitatea (2.4) este de forma:
|bZ
a
f(x)g(x)dx |≤
vuuut bZa
f2(x)dx
vuuut bZa
g2(x)dx.
Observatia 2.2 Daca (X, h·, ·i) un spatiu liniar euclidian, atunci functia k · k: X → Rdefinta de ∀u ∈ X, k u k=
phu,ui, care reprezinta lungimea vectorului u, relatia (2.3),
este o norma pe X (satisface axiomele normei ( i, ii, iv ). Aceasta norma se numeste normaindusa ın X de produsul scalar definit ın spatiul liniar X.
Definitia 2.4 Fie (X,+, ·,R) un spatiu liniar ın care este definita o norma. Perecheaordonata (X, k · k) se numeste spatiu liniar normat.
Definitia 2.5 Fie (X,+, ·,R) un spatiu liniar euclidian. Daca (X, k · k) este un spatiuliniar normat cu norma k · k indusa de produsul scalar h·, ·i, atunci perechea ordonata(X, k · k) se numeste spatiu prehilbertian.
Definitia 2.6 Daca (X, k · k) este un spatiu prehilbertian complet (ın sensul ca orice sirCauchy de elemente din X este un sir convergent) atunci (X, k · k) se numeste spatiuHilbert.
Exemplul 2.5 Spatiul (Rn,+, ·,R), n ≥ 1 este evident un spatiu Hilbert relativ la produsulscalar canonic definit ın Exemplul 2.1.
Observatia 2.3 Fie (X, h·, ·i) un spatiu liniar euclidian. Pentru orice pereche ordonata devectori (u,v) ∈ (X \ {θX})2 inegalitatea Cauchy - Schwarz - Buniakowski poate fi scrisa deforma:
| hu,vi |k u kk v k ≤ 1⇔ −1 ≤
hu,vik u kk v k ≤ 1.
Definitia 2.7 Fie (X, h·, ·i) un spatiu liniar euclidian. Solutia unica ın intervalul [0, π],notata \(u,v), a ecuatiei
cos\(u,v) =hu,vi
k u kk v kse numeste unghiul neorientat al perechii ordonate (u,v) ∈ (X \ {θX})2.

2.1. BAZE ORTONORMATE 19
Definitia 2.8 Fie (X, h·, ·i) un spatiu liniar euclidian. Daca (u,v) ∈ X2 si hu,vi = 0atunci u se numeste vector ortogonal cu vectorul v. Folosim notatia u ⊥ v.
In plan sau ın spatiu aceasta notiune coincide cu cea de perpendicularitate.
Definitia 2.9 Fie (X, h·, ·i) un spatiu liniar euclidian. Aplicatia
d : X×X→ R
definita prin∀u,v ∈ X : d(u,v) = ku− vk
se numestemetrica sau distanta pe X. Numarul real d(u,v) se numeste distanta dintrevectorii u si v, iar perechea ordonata (X, d) se numeste spatiu metric.
Exemplul 2.6 In cazul spatiului euclidian aritmetic canonic n−dimensional (Rn, h·, ·i)cu produsul scalar definit prin relatia (2.1), distanta dintre vectorii x,y ∈ Rn, x =(x1, . . . , xn) , y = (y1, . . . , yn) este data de
d(x,y) =
vuut nXi=1
(xi − yi)2.
2.1 Baze ortonormate
Definitia 2.10 Fie (X, h·, ·i) un spatiu liniar euclidian. Un sistem de vectori S = (vi)i=1,mse numeste ortogonal daca vectorii sai sunt ortogonali doi cate doi, adica
∀i, j = 1,m, i 6= j : vi ⊥ vj.
Definitia 2.11 Fie (X, h·, ·i) un spatiu liniar euclidian. Un sistem de vectori S = (vi)i=1,mse numeste ortonormat daca este ortogonal si format numai din vectori unitari (versori).
Observatia 2.4 Din orice sistem de vectori ortogonal, format din vectori nenuli, se poateobtine un sistem ortonormat ınmultind fiecare vector vi,vi 6= θX, i = 1,m, al sistemului cuk vi k−1, obtinandu-se astfel vectori unitari.
Exemplul 2.7 Sistemul de functii S = (f0(x) = 1, f1(x) = x, f2(x) =12(3x2 − 1)) este
un sistem ortogonal ın (C ([−1, 1] ,R) , h·, ·i) cu produsul scalar definit ın Exemplul 2.2.Intr-adevar,
hf0, f1i =1R−1
xdx = 0, hf1, f2i =1R−1
x12(3x2 − 1)dx = 0, hf0, f2i =
1R−1
12(3x2 − 1)dx = 0.
Teorema 2.3 Orice sistem de vectori ortogonal, format din vectori nenuli, este liniar in-dependent.

20 CAPITOLUL 2. SPATII LINIARE EUCLIDIENE
Demonstratie. Fie un sistem de vectori S = (vi)i=1,m ortogonal, format din vectorinenuli. Sa presupunem ca avem: α1v1 + . . .+ αnvn = θX. Obtinem:∀ k = 1, n : hα1v1 + . . .+ αnvn,vki = αik k vik k2= 0, k vik k6= 0⇒ αik = 0, k = 1, p,
deci sistemul S este liniar independent.¨
Consecinta 2.1 Daca dimK X =n, utilizand Teorema 2.3 rezulta ca orice sistem de n vec-tori ortogonal (sau ortonormat), format din vectori nenuli, formeaza o baza ın X.
Definitia 2.12 Fie (X, h·, ·i) un spatiu liniar euclidian, dimK X =n. O baza S = (ei)i=1,nse numeste baza ortonormata daca S = (ei)i=1,n este un sistem ortonormat de vectori.
Observatia 2.5 Un sistem de vectori S = (ei)i=1,n este o baza ortonormata daca
∀i, j = 1, n : hei, eji = δij, unde δij =
½1, daca i = j0, daca i 6= j
este simbolul lui Kronecker.
Exemplul 2.8 Sistemul de functii S = (f0(x) = 1, f1(x) = sinx, f2(x) = cosx, . . . ,f2n−1(x) = sinnx, f2n(x) = cosnx) este un sistem ortogonal ın (C ([−π, π] ,R) , h·, ·i) cu pro-
dusul scalar definit ın Exemplul 2.2 deoarece
πZ−π
f2i−1(x) f2j−1(x)dx =
πZ−π
sin(ix) sin(jx)dx =
0,
πZ−π
f2i(x)f2j(x)dx =
πZ−π
cos(ix) cos(jx)dx = 0 pentru i 6= j.
Ortonormam sistemul. Pentru aceasta calculam norma fiecarui vector din sistem.
k f0 k2=πR−π
dx = 2π,
k f2k−1 k2=πR−πsin2 kxdx = π,
k f2k k2=πR−πcos2 kxdx = π.
Sistemul S0 = (g0(x) =1√2π
, g1(x) =1√πsinx, f2(x) =
1√πcosx, . . . , f2n−1(x) =
1√πsinnx, f2n(x) =
1√πcosnx) este un sistem ortonormat. Acest sistem va fi utilizat la
construirea seriei Fourier atasata unei functii periodice.
2.2 Procedeul de ortogonalizare Gram-Schmidt
Fie (X, h·, ·i) un spatiu liniar euclidian, dimK X =n. Evident ca acest spatiu trebuie sacontina o baza. Nu este evident ca acest spatiu contine o baza ortonormata. Urmatoareateorema asigura existenta unei asemenea baze si totodata ne da un procedeu de constructiea acesteia, pornind de la o baza oarecare.

2.2. PROCEDEUL DE ORTOGONALIZARE GRAM-SCHMIDT 21
Teorema 2.4 (Procedeul de ortonormare Gram-Schmidt) In orice spatiu liniareuclidian (X, h·, ·i) exista cel putin o baza ortonormata.
Demonstratie. Fie (X, h·, ·i) un spatiu liniar euclidian, dimK X =n. Pornind de la obaza arbitrara S = (v1,v2, . . . ,vn) Construim o baza ortonormata S0 folosind procedeulGram-Schmidt. Consideram vectorii:⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
u1 = v1u2 = v2 + α21u1u3 = v3 + α31u1 + α32u2· · ·un = vn + αn1u1 + · · ·+ αn,n−1un−1
(2.6)
si vom determina scalarii αij care apar ın (2.6) impunand conditia ca fiecare vector ui sa fieortogonal pe vectorii (u1,u2, . . . ,ui−1). u1 ⊥ u2 ⇒ hu2,u1i = 0 si folosind a doua relatiedin (2.6) obtinem: α21 = −
hv2,u1ik u1 k2
.
In general hui,uki = 0 pentru k < i,⇒ hvi + αi1u1 + · · ·+ αi,i−1ui−1,uki = 0⇒ αik =
−hvi,ukik uk k2, pentru i = 2, n si k < i.
Ramane de demonstrat ca vectorii din sistemului (u1,u2, . . . ,un) construiti conformprocedeului descris sunt diferiti de zero, ın caz contrar ımpartirea cu k uk k2 nu ar aveasens. Observam ca uj este o combinatie liniara formata din v1,v2, . . . ,vj−1, deci ınlocuindpe u1,u2, . . . ,uk−1 prin aceste combinatii liniare ın uk = vk + αk1u1 + · · · + αk,k−1uk−1obtinem uk = vk + γ1v1+ · · ·+ γk−1vk−1. Dar uk = 0⇒ (v1,v2, . . . ,vk) liniar dependenti,ceea ce este fals deoarece ei formeaza un subsistem al unui sistem liniar independent.Astfel am construit sistemul ortogonal S = (ui)i=1,n care nu contine vectorul nul. Con-
form Teoremei 2.3 sistemul S = (ui)i=1,n este liniar independent, rezulta ca formeaza o baza.
Sistemul S0 = (e1, . . . , en), e1 =1
k u1 ku1, . . . , en =
1
k un kun, este baza ortonormata .¥
Exercitiul 2.1 Fie spatiul liniar (R3,+, ·,R) pe care este definit produsul scalar standard(vezi Exemplul 2.1). Sa se afle o baza ortonormata ın R3, plecand de la baza
v1 =
⎛⎝ 122
⎞⎠ ,v2 =
⎛⎝ −135
⎞⎠ ,v3 =
⎛⎝ 40−2
⎞⎠ . (2.7)
Rezolvare. Fie u1 = v1 si u2 = v2 + α21v1, hu2,u1i = 0⇒ α21 = − hv2,u1i / hu1,u1i =
−5/3. Va rezulta ca u2 este dat prin u2 =
⎛⎝ −8/3−1/35/3
⎞⎠. Cautam pe u3 de forma u3 =
v3+α31u1+α32u2 si gasim α31 = 0, α32 = 7/5. Va rezulta ca u3 =
⎛⎝ 4/15−7/155/15
⎞⎠. Calculamlungimile vectorilor u1, u2 si u3.

22 CAPITOLUL 2. SPATII LINIARE EUCLIDIENE
ku1k =√12 + 22 + 22 = 3,
ku2k =q(−8/3)2 + (−1/3)2 + (5/3)2 =
√10,
ku3k =q(4/15)2 + (−7/15)2 + (5/15)2 = 1
5
√10
Impartind u1, u2 si u3 cu lungimea lor, am gasit trei vectori ortonormati si anume⎛⎝ 132323
⎞⎠ ,
⎛⎜⎝ −8
3√10
− 13√10
53√10
⎞⎟⎠ ,
⎛⎜⎝4
3√10
− 73√10
53√10
⎞⎟⎠ (2.8)
formand o baza ortonormata.¨
Exercitiul 2.2 Se considera spatiul liniar (R2 [x] ,+, ·,R) al polinoamelor de grad cel mult
doi pe care se defineste produsul scalar: ∀(p,q) ∈ (R2 [x])2 : hp,qi =1Z
−1
p(x)q(x)dx.
Consideram baza B = (1, x, x2) . Aplicand procedeul Gram-Schmidt sa se obtina din bazadata o baza ortonormata.
Rezolvare. Fie r1(x) = 1,
r2(x) = x−
1Z−1
x·1dx
1Z−1
1·1dx
· 1 = x− 02· 1 = x,
r3(x) = x2 −
1Z−1
x2·1dx
1Z−1
1·1dx
· 1−
1Z−1
x2·xdx
1Z−1
x·xdx
· x = x2 − 2/32· 1− 0
2/3· x = x2 − 1
3.
Sistemul de vectori¡1, x, x2 − 1
3
¢este ortogonal. Il ortonormam, ımpartind vectorii la
lungimea lor.s1(x) =
1
1Z−1
1·1dx
· 1 = 1√2,
s2(x) =1
1Z−1
x·xdx
· x =q
32· x,

2.2. PROCEDEUL DE ORTOGONALIZARE GRAM-SCHMIDT 23
s3(x) =1
1Z−1
(x2− 13)·(x2−
13)dx
·¡x2 − 1
3
¢= 1
2
q52(3x2 − 1) .
Sistemul de vectori³1√2, xq
32, 12
q52(3x2 − 1)
´este ortonormat.¨
2.2.1 Expresia produsului scalar ıntr-o baza ortonormata
Fie (X, h·, ·i) un spatiu liniar euclidian, dimR X =n si S = (ei)i=1,n o baza ortonormata
ın X. Fie (u,v) ∈ X2, ∃∗(α1, . . . , αn) ∈ Rn, ∃∗(β1, . . . , βn) ∈ Rn : u =nXi=1
αiei,v =
nXj=1
βjej. si S = (ei)i=1,n o baza ortonormata ın X. Atunci expresia produsului scalar ın
baza ortonormata data va fi:
hu,vi = (α1 . . . αn)
⎛⎜⎝ β1...βn
⎞⎟⎠ =nXi=1
αiβi. (2.9)
Observam ca daca (X, h·, ·i) este un spatiu liniar euclidian, expresia produsului scalarıntr-o baza ortonormata se reduce la produsul scalar standard din Rn. In acest caz expresialungimii unui vector ıntr-o baza ortonormata este:
∀u ∈ X,u =nXi=1
αiei :k u k= (α1 . . . αn)
⎛⎜⎝ α1...αn
⎞⎟⎠ =
vuut nXi=1
α2i .
Definitia 2.13 Matricea A ∈Mn(R) se numeste ortogonala daca ATA = AAT= In.
Observatia 2.6 Din definitie rezulta ca dacaA ∈Mn(R) este o matrice ortogonala, atunciavem det(A) = ±1, A este inversabila si inversa sa este A−1 = AT .
Teorema 2.5 Fie (X, h·, ·i) un spatiu liniar euclidian si dimR X =n si S = (ei)i=1,n, S1 =(e0i)i=1,n doua baze ortonormate ın X. Daca S
A→ S1, unde A = (aij)i,j=1,n, atunci matriceaA este ortogonala. Reciproc, daca baza S este ortonormata, iar matricea A este ortogonala,atunci baza S1 este ortonormata.
Demonstratie. Neesitatea. Vectorii (e0i)i=1,n se pot descompune ın raport cu vectoriibazei S dupa relatiile:
e0j = (a1j, a2j, . . . , anj)
⎛⎜⎜⎜⎝e1e2...en
⎞⎟⎟⎟⎠ =nXi=1
aijei, j = 1, n.

24 CAPITOLUL 2. SPATII LINIARE EUCLIDIENE
Atunci he0i, e0ji = hnX
k=1
akiek,nX
h=1
ahjehi =nX
k=1
nXh=1
akiahjhek, ehi =nX
k=1
nXh=1
akiahjδkh =
nXk=1
akiakj ⇒ δij =nX
k=1
akiakj ⇔ In = AtA, adica A este o matrice ortogonala.
Suficienta. Daca A este o matrice ortogonala, atunci din he0i, e0ji =nX
k=1
nXh=1
akiahjδkh =
nXk=1
akiakj = δij rezulta ca S1 este o baza ortonormata.¥

Capitolul 3
Transformari liniare
In acest capitol definim aplicatii pe spatii liniare de dimensiune finita.Fie (X,+, ·,K) si (Y,+, ·,K) spatii liniare(vectoriale).
Definitia 3.1 O aplicatie T : X→ Y se numeste transformare liniara (aplicatie liniarasau functie liniara sau operator liniar sau morfism de spatii liniare) daca satisfaceconditiile:a)
∀u,v ∈ X : T (u+ v) = T (u) + T (v) (3.1)
(numita proprietatea de aditivitate a aplicatiei T ),b)
∀α ∈ K, ∀u ∈X : T (αu) = αT (u) (3.2)
(numita proprietatea de omogeneitate a aplicatiei T ).
Se obtine prin inductie relatia
T
ÃmXi=1
cixi
!=
mXi=1
ciT (xi) ,∀ci ∈ R,∀xi ∈ Xn, i = 1,m. (3.3)
Teorema 3.1 (Teorema de caracterizare a transformarilor liniare)Conditia necesara si suficienta ca o transformare sa fie liniara este:
∀α ∈ K,∀u, v ∈ X : T (αu+ v) = αT (u) + T (v). (3.4)
Demonstratie.Necesitatea. Presupunem ca T este o transformare liniara. Conform Definitiei 3.1
∀α ∈ K,∀u,v ∈ X : T (αu+ v) (3.1)= T (αu) + T (v)(3.2)= αT (u) + T (v).
Suficienta. Considerand ın (3.4) α = 1 rezulta (3.1). Considerand ın (3.4) v = θX sifolosind Observatia 3.1 rezulta (3.2).¥Vom nota L(X,Y) = {T | T : X→ Y, T transformare liniara} .In cazul particular al endomorfismelor (X = Y), vom nota L(X,X) =L(X).
25

26 CAPITOLUL 3. TRANSFORMARI LINIARE
Teorema 3.2 (L(X,Y),+, ·,K) este un spatiu liniar.
Demonstratie.Definim legea interna din L(X,Y). Fie (T, S) ∈ L(X,Y) × L(X,Y) si introducem suma
lor prin (T + S)(u) = T (u) + S(u), ∀u ∈ X. Folosind definitia sumei a doua transformari,liniaritatea si Teorema 3.1 obtinem:∀(T, S) ∈ L(X,Y) × L(X,Y):(T + S)(αu + v) = T (αu + v) + S(αu + v) = αT (u) +
T (v) + αS(u) + S(v) = α(T (u) + S(u)) + (T (v) + S(v)) = α(T + S)(u) + (T + S)(u),∀α ∈ K,∀u ∈ X, adica T + S ∈ L(X,Y).Definim legea externa din L(X,Y). Introducem produsul dintre un scalar si o transfor-
mare∀T ∈ L(X,Y),∀λ ∈ K : (λT )(u) = λT (u),∀u ∈ X.Folosind definitia produsului dintre un scalar si o transformare, liniaritatea ei si Teorema
3.1 obtinem:∀(λ, T ) ∈ K× L(X,Y):(λT )(αu+ v) = λT (αu+ v) = λ(αT (u) + T (v)) = α(λT (u)) +
λT (v) = α(λT )(u) + (λT (u),∀(α,u) ∈ K×X, adica λT ∈ L(X,Y).Avand definite aceste operatii se verifica usor ca (L(X,Y),+) este grup comutativ si
sunt satisfacute axiomele SL1 − SL4 din Definitia 2.1 a spatiului liniar.¥
Definitia 3.2 O transformare liniara T se numeste monomorfism, epimorfism sauizomorfism dupa cum T este respectiv injectiva, surjectiva sau bijectiva.Daca X = Y atunci aplicatia liniara T se numeste endomorfism. Un endomorfism
bijectiv se numeste automorfism.
Observatia 3.1 Daca ın Definitia 3.1, a) ınlocuim u = v = θX obtinem T (θX) = T (θX)+T (θX), de unde rezulta ca
T (θX) = θY, (3.5)
unde θX si respectiv θY sunt vectorii nuli din K-spatiile liniare X si respectiv Y. Conditia(3.5) este doar o conditie necesara ca o aplicatie sa fie liniara. De aici rezulta ca dacaT (θX) 6= θY atunci T nu este liniara.
Exemplul 3.1 Aplicatia T : R3 → R2, definita prin T (x) = (x1 + 2x3, x1 + x2 − x3),∀x = (x1, x2, x3) ∈ R3 este o transformare liniara (se verifica prin calcul conditiile (3.1) si(3.2)).
Exemplul 3.2 Aplicatia T : R2 → R3, definita prin T (x) = (x1 + 1, x2, x1 + x2), ∀x =(x1, x2) ∈ R2 nu este o transformare liniara deoarece T (θR2) = (1, 0, 0), conform observatiei3.1 unde θR2 = (0, 0).
Teorema 3.3 Fie (X,+, ·,K), (Y,+, ·,K) si (Z,+, ·,K) spatii liniare si T ∈ L(X,Y), S ∈L(Y,Z). Atunci S ◦ T ∈ L(X,Z) (compunerea a doua transformari liniare este o transfor-mare liniara), unde (S◦T )(u) = S(T (u)),∀u ∈ X. Mai mult, daca T si S sunt izomorfisme,atunci S ◦ T este izomorfism.

3.1. MATRICEA UNEI TRANSFORMARI LINIARE 27
Pentru orice izomorfism T ∈ L(X,Y), aplicatia inversa T−1 ∈ L(Y,X) (inversul unuiizomorfism liniar este un izomorfism liniar), unde ∀v ∈ Y :T−1(v) = u⇔ T (u) = v, esteun izomorfism.
Demonstratie. Fie ∀(α,u,v) ∈ K×X2 : (S ◦T )(αu+ v) = S(T (αu+ v)) = S(αT (u)+T (v)) = αS(T (u)) + S(T (v)) = α(S ◦ T )(u) + (S ◦ T )(v).Daca T si S sunt bijective, atunci S ◦ T este bijectiva, deci S ◦ T este izomorfism.Daca T este bijectie rezulta ca T−1 este bijectie.Demonstram ca T−1 este o transformare liniara. Fie ∀(α,w1,w2) ∈ K×Y2 ⇒∃(u1,u2) ∈
X2 : T (u1) = w1, T (u2) = w2 : T−1(αw1+w2) = T−1(αT (u1) + T (u2)) = T−1(T (αu1+
u2)) = (T−1 ◦ T )(αu1+ u2) = αu1+ u2 = αT−1(w1) + T−1(w2), deci T−1(αw1+w2) =
αT−1(w1) + T−1(w2).¨
3.1 Matricea unei transformari liniare
Teorema 3.4 Fie (X,+, ·,K) si (Y,+, ·,K) spatii liniare, dimK X = n,dimK Y = m siT ∈ L(X,Y). Daca S1 = (e1, . . . , en) este o baza ın (X,+, ·,K) si S2 = (e01, . . . , e
0m) o
baza ın (Y,+, ·,K), atunci exista o matrice unica P ∈Mm×n(K), P = (pij)i=1,m,j=1,n astfelıncat ⎛⎜⎝ T (e1)
...T (en)
⎞⎟⎠ = PT
⎛⎜⎝ e01...e0m
⎞⎟⎠ . (3.6)
Daca u ∈ X, u = (α1 . . . αn)
⎛⎜⎝ e1...en
⎞⎟⎠ are imaginea T (u) = (β1 . . . βm)
⎛⎜⎝ e01...e0m
⎞⎟⎠ ,
atunci ⎛⎜⎝ β1...βm
⎞⎟⎠ = P
⎛⎜⎝ α1...αn
⎞⎟⎠ . (3.7)
Demonstratie. Demonstram existenta matricei P. Daca S1 = (e1, . . . , en) este o baza ın(X,+, ·,K), vectorii T (ei) ∈ Y, i = 1, n au descompunerile ın raport cu baza S2 de forma:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
T (e1) =mPj=1
pj1e0j
· · ·T (ei) =
mPj=1
pjie0j
· · ·T (en) =
mPj=1
pjne0j
, unde pji ∈ K, i = 1, n, j = 1,m,

28 CAPITOLUL 3. TRANSFORMARI LINIARE
echivalenta cu scrierea matriceala⎛⎜⎝ T (e1)...T (en)
⎞⎟⎠ =
⎛⎜⎝ p11 · · · pm1...
...p1n · · · pmn
⎞⎟⎠⎛⎜⎝ e01...e0m
⎞⎟⎠⇔⎛⎜⎝ T (e1)...T (en)
⎞⎟⎠ = PT
⎛⎜⎝ e01...e0m
⎞⎟⎠ ,(3.8)
ceea ce reprezinta relatia (3.6).Matricea P este unica datorita unicitatii descompunerii unui vector dupa vectorii bazei.
Demonstram relatia (3.7). Fie T ∈ L(X,Y) si u ∈ X, u = (α1 . . . αn)
⎛⎜⎝ e1...en
⎞⎟⎠ . Atunci
T (u) = (α1 . . . αn)
⎛⎜⎝ T (e1)...T (en)
⎞⎟⎠ = (β1 . . . βm)
⎛⎜⎝ e01...e0m
⎞⎟⎠ . Utilizand relatia (3.8) rezulta:
(α1 . . . αn)PT
⎛⎜⎝ e01...e0m
⎞⎟⎠ = (β1 . . . βm)
⎛⎜⎝ e01...e0m
⎞⎟⎠⇒ (α1 . . . αn)PT = (β1 . . . βm).
Prin transpunere rezulta relatia (3.7).¥
Exemplul 3.3 Fie aplicatia T ∈ L(R3,R4) definita prinT (x) = (x1 + x2, x1 + x3, x2 − x3, x1 − x2 + 2x3),∀x = (x1, x2, x3) ∈ R3.Sa se determine matricea lui T ın bazeleS1 = (e1 = (1, 1,−1), e2 = (1,−1, 1), e2 = (−1, 1, 1)) si respectivS2 = (e
01 = (0, 1, 1, 1), e
02 = (1, 0, 1, 1), e
03 = (1, 1, 0, 1), e
04 = (1, 1, 1, 0)) .
Rezolvare. Calculam T (e1) = (1 + 1, 1− 1, 1 + 1, 1− 1− 2) = (2, 0, 2,−2) =4X
i=1
pi1e0i =
−43(0, 1, 1, 1) + 2
3(1, 0, 1, 1)− 4
3(1, 1, 0, 1) + 8
3(1, 1, 1, 0)
T (e2) = (1 − 1, 1 + 1,−1 − 1, 1 + 1 + 2) = (0, 2,−2, 4) =4X
i=1
pi2e0i =
43(0, 1, 1, 1) −
23(1, 0, 1, 1) + 10
3(1, 1, 0, 1)− 8
3(1, 1, 1, 0)
T (e3) = (−1 + 1,−1 + 1, 1 − 1,−1 − 1 + 2) = (0, 0, 0, 0) =4X
i=1
pi3e0i = 0(0, 1, 1, 1) +
0(1, 0, 1, 1) + 0(1, 1, 0, 1) + 0(1, 1, 1, 0).
P =S1 (T )S2 =
⎛⎜⎜⎝43
43
023−230
−43
103
083−830
⎞⎟⎟⎠ .¨

3.1. MATRICEA UNEI TRANSFORMARI LINIARE 29
Definitia 3.3 Fie (X,+, ·,K) si (Y,+, ·,K) doua spatii liniare, dimK X = n, dimK Y =m,S1 = (ej)j=1,n, S2 = (e
0j)j=1,m doua baze ın X si respectiv Y iar T ∈ L(X,Y). Matricea
P ∈ Mm×n(K), ale carei coloane sunt coordonatele vectorilor T (ej), j = 1, n ın baza S2din spatiul liniar Y, se numeste matricea asociata transformarii liniare T ın raport cuperechea de baze (S1, S2) .
Folosim notatia P = S1(T )S2 .
Observatia 3.2 Relatia (3.7) scrisa sub forma⎛⎜⎝ β1...βn
⎞⎟⎠ =S1 (T )S2
⎛⎜⎝ α1...αn
⎞⎟⎠ (3.9)
se numeste ecuatia matriceala a transformarii liniare T.
Teorema 3.5 (Legea de schimbare a matricei unui endomorfism la schimbareabazelor) Fie (X,+, ·,K) spatiu liniar, dimK X = n si T ∈ L(X,X). Fie S1 = (ei)i=1,n,
S2 = (e0i)i=1,n doua baze ın (X,+, ·,K) si S1
A→ S2. Atunci are loc relatia:
S2(T )S2 = A−1 ·S1 (T )S1 ·A. (3.10)
Demonstratie. Fie T ∈ L(X,X) si u ∈ X deci se poate exprima o combinatie de elemente
ale bazei S1, u = (α1 . . . αn)
⎛⎜⎝ e1...en
⎞⎟⎠ si T (u) = (α1 . . . αn)
⎛⎜⎝ T (e1)...T (en)
⎞⎟⎠ .
Dar u ∈ X deci se poate exprima ca o combinatie de elemente ale bazei S2, u = (β1 . . .
βn)
⎛⎜⎝ e01...e0n
⎞⎟⎠ si T (u) = (β1 . . . βn)
⎛⎜⎝ T (e01)...T (e0n)
⎞⎟⎠ .
Folosim ecuatia matriceala a transformarii liniare T ın perechea de baze (S1, S1) , (3.9):⎛⎜⎝ T (e1)...T (en)
⎞⎟⎠ = PT
⎛⎜⎝ e1...en
⎞⎟⎠ ,P =S1 (T )S1 . (3.11)
Folosim ecuatia matriceala a transformarii liniare T ın perechea de baze (S2, S2)⎛⎜⎝ T (e01)...T (e0n)
⎞⎟⎠ = QT
⎛⎜⎝ e01...e0m
⎞⎟⎠ ,Q =S2 (T )S2 .

30 CAPITOLUL 3. TRANSFORMARI LINIARE
Folosim formula de schimbare a coordonatelor unui vector la schimbarea bazei, schim-barea coordonatelor (α1 . . . αn) ın baza S1 ın coordonatele (β1 . . . βn) ın baza S2, relatia(2.10), rezulta ⎛⎜⎝ α1
...αn
⎞⎟⎠= A⎛⎜⎝ β1...βn
⎞⎟⎠ (3.12)
Dar
T (u) = (α1 . . . αn)
⎛⎜⎝ T (e1)...T (en)
⎞⎟⎠ = T (u) = (α1 . . . αn)PT
⎛⎜⎝ e1...en
⎞⎟⎠T (u) = (β1 . . . βn)Q
T
⎛⎜⎝ e01...e0m
⎞⎟⎠ = (β1 . . . βn)QTAT
⎛⎜⎝ e1...en
⎞⎟⎠ .
Din unicitatea descompunerii rezulta
(α1 . . . αn)PT = (β1 . . . βn)Q
TAT ⇔ P
⎛⎜⎝ α1...αn
⎞⎟⎠ = AQ
⎛⎜⎝ β1...βn
⎞⎟⎠ .
Folosind relatia (3.12) rezulta
PA
⎛⎜⎝ β1...βn
⎞⎟⎠ = AQ
⎛⎜⎝ β1...βn
⎞⎟⎠ ,∀u ∈ X.
De unde rezultaQ = A−1PA.Exemplificam continutul teoremei prin urmatoarea schema:
XS1
S1(T )S1→ XS1
A ↓ ↓ AXS2
S2(T )S2→ XS2
S2(T )S2 = A−1S1(T ) S1A.¥Formula (3.10) se numeste formula de schimbare a matricei unei transformari
liniare T ∈ L(X,X) la schimbarea bazei ın spatiul liniar (X,+, ·,K).
Exemplul 3.4 Fie aplicatia T ∈ L(R3,R3) definita prinT (x) = (x1 + x2, x1 + x3, x2 − x3),∀x = (x1, x2, x3) ∈ R3.Sa se determine matricea lui T ın baza canonica din R3, S = (e1 = (1, 0, 0), e2 =
(0, 1, 0), e3 = (0, 0, 1)) si in bazaS1 = (u1 = (1, 1,−1),u2 = (1,−1, 1),u2 = (−1, 1, 1)) .
Rezolvare. Observam ca T este un endomorfism deci folosim relatia (3.10). Determinammatricea lui T ın baza canonica, S(T )S = P

3.1. MATRICEA UNEI TRANSFORMARI LINIARE 31
T (e1) = (1, 1, 0) = 1(1, 0, 0) + 1(0, 1, 0) + 0(0, 0, 1)T (e2) = (1, 0, 1) = 1(1, 0, 0) + 0(0, 1, 0) + 1(0, 0, 1)T (e3) = (0, 1,−1) = 0(1, 0, 0) + 1(0, 1, 0)− 1(0, 0, 1),
S(T )S =
⎛⎝ 1 1 01 0 10 1 −1
⎞⎠ .
Determinam matricea de trecere de la baza S la baza S1,A =
⎛⎝ 1 1 −11 −1 1−1 1 1
⎞⎠ .
Inversa matricei A este A−1=
⎛⎝ 12
120
120 1
2
0 12
12
⎞⎠ .
Rezulta
S1(T )S1 = A−1 ·S (T )S ·A =
⎛⎝ 12
120
120 1
2
0 12
12
⎞⎠⎛⎝ 1 1 01 0 10 1 −1
⎞⎠⎛⎝ 1 1 −11 −1 1−1 1 1
⎞⎠ =
=
⎛⎝ 1 12
12
121 −1
212
12
0
⎞⎠⎛⎝ 1 1 −11 −1 1−1 1 1
⎞⎠ =
⎛⎝ 1 1 02 −1 01 0 0
⎞⎠ .
Acelasi rezultat ıl obtinem daca calculam T (ui), i = 1, 3 si descompuneam acesti vectoridupa vectorii bazei S2.
T (u1) = (2, 0, 2) = 1(1, 1,−1) + 2(1,−1, 1) + 1(−1, 1, 1)T (ui) = (0, 2,−2) = 1(1, 1,−1)− 1(1,−1, 1) + 0(−1, 1, 1)T (ui) = (0, 0, 0) = 0(1, 1,−1) + 0(1,−1, 1) + 0(−1, 1, 1)
Deci S1(T )S1 =
⎛⎝ 1 1 02 −1 01 0 0
⎞⎠ .¨
Definitia 3.4 Matricele A si C−1AC se numesc matrice asemenea.
Observatia 3.3 Matricele unui endomorfism T ∈ L(X) relativ la doua baze alese ın Xsunt matrice asemenea.
Teorema 3.6 Fie (X,+, ·,K), (Y,+, ·,K) si (Z,+, ·,K) trei spatii liniare, dimK X = n,dimK Y = m, dimK Z = p si T ∈ L(X,Y), S ∈ L(Y,Z). Fie S1 = (ei)i=1,n, S2 = (e0i)i=1,m,S3 = (e00i )i=1,p baze ın (X,+, ·,K), (Y,+, ·,K) si respectiv ın (Z,+, ·,K). Atunci are locrelatia:
S1(S ◦ T )S3 =S2 (S)S3 S1(T )S2. (3.13)
Demonstratie. Fie u ∈ X, u = (α1 . . . αn)
⎛⎜⎝ e1...en
⎞⎟⎠ , T (u) = v ∈ Y, v = (β1 . . .
32 CAPITOLUL 3. TRANSFORMARI LINIARE
βm)
⎛⎜⎝ e01...e0m
⎞⎟⎠ , S(v) = w ∈ Z, w = (γ1 . . . γp)
⎛⎜⎝ e001...e00p
⎞⎟⎠.Fie S1(T )S2 = P ∈Mm×n(K). Are loc relatia:
⎛⎜⎝ β1...βm
⎞⎟⎠ = P
⎛⎜⎝ α1...αn
⎞⎟⎠ .
Fie S2(S)S3 = Q ∈Mp×m(K). Are loc relatia:
⎛⎜⎝ γ1...γp
⎞⎟⎠ = Q
⎛⎜⎝ β1...βm
⎞⎟⎠ .
Atunci
⎛⎜⎝ γ1...γp
⎞⎟⎠ = QP
⎛⎜⎝ α1...αn
⎞⎟⎠ , adica S1(S◦T )S3 = QP care reprezinta relatia (3.13).¥
Teorema 3.7 Fie (X,+, ·,K) si (Y,+, ·,K) doua spatii liniare, dimK X = n,dimK Y = nsi T ∈ L(X,Y), T izomorfism. Fie S1 si S2 doua baze ın (X,+, ·,K) si respectiv (Y,+, ·,K).Atunci are loc relatia:
S2(T−1)S1 = (S1(T )S2)
−1 . (3.14)
Demonstratie.Deoarece T ◦ T−1 = idY si T
−1 ◦ T = idX, tinand seama de Teorema 3.6 si de faptul camatricea aplicatiei identitate este matricea unitate, rezulta:
S1(T )S2 ·S2 (T−1)S1 =S2 (T−1)S1 ·S1 (T )S2 = I⇒ (S1(T )S2)
−1 =S2 (T−1)S1 .¥
3.2 Nucleul si imaginea unei aplicatii liniare
Definitia 3.5 Fie T ∈ L(X,Y). Multimea ker(T ) = {u | u ∈ X : T (u) = θY} se numestenucleul transformarii liniare T .
Definitia 3.6 Fie T ∈ L(X,Y). Multimea Im(T ) = {w | w ∈ Y : ∃u ∈ X : T (u) = w} senumeste imaginea transformarii liniare T .
Teorema 3.8 Nucleul lui T este un subspatiu liniar al spatiului liniar X. Imaginea lui Teste un subspatiu liniar al spatiului liniar X.Demonstratie. Observam ca ker(T ) 6= ∅ deoarece θX ∈ ker(T ). Fie α ∈ R si u,v ∈
ker(T ) astfel ıncat T (u) = θ, T (v) = θ. Atunci T (αu+ v) = αT (u) + T (v) = θX si deciαu+ v ∈ ker(T ).Observam ca Im(T ) 6= ∅ deoarece θY ∈ Im(T ). Fie α ∈ R si u,v ∈ Im(T ). Rezulta
ca exista w1,w2 ∈ Y astfel ıncat T (u) = w1, T (v) = w2; αw1 + w2 = αT (u) + T (v) =T (αu+ v) de unde rezulta ca αw1 +w2 ∈ Im(T ).¥

3.3. RANGUL SI DEFECTUL UNEI TRANSFORMARI LINIARE 33
3.3 Rangul si defectul unei transformari liniare
Definitia 3.7 Dimensiunea spatiului ker(T ) se numeste defectul lui T si se noteaza def(T ).Dimensiunea spatiului Im(T ) se numeste rangul lui T si se noteaza rang(T ).
Teorema 3.9 Transformarea liniara T este injectiva daca si numai daca ker(T ) = {θX} .
Demonstratie. Necesitatea. Presupunem ca transformarea liniara T este injectiva si fieu ∈ ker(T ) deci T (u) = θY. Dar T (θX) = θY si cum T (u) = T (θX) rezulta ca u = θX,adica ker(T ) = {θX} .Suficienta. Presupunem ca ker(T ) = {θX} si fie T (u) = T (v). Rezulta T (u − v) = θY
deci u− v ∈ ker(T ), adica u = v, deci T injectiva.¥Exercitiul 3.1 Transformarea liniara T este surjectiva daca si numai daca Im(T ) = Y.
Teorema 3.10 (Teorema rang-defect) Fie (X,+, ·,K) si (Y,+, ·,K) spatii liniare, dimK X =n si T ∈ L(X,Y). Atunci
rang(T ) + def(T ) = n.
Demonstratie. Fie def(T ) = r ≤ n si fie (v1,v2, . . . ,vr) o baza ın ker(T ). Com-pletam sistemul de vectori (v1,v2, . . . ,vr) pana la o baza ın spatiu X (Teorema 2.7),{v1,v2, . . . ,vr,vr+1,vr+2, . . . ,vn} .Vom demonstra ca sistemul de vectori (T (vr+1), . . . , T (vn)) este o baza ın Im(T ).
Aratam ca vectorii sistemului (T (vr+1), . . . , T (vn)) sunt liniar independenti ın Im(T ).
FienP
i=r+1
αiT (vi) = θY rezulta ca T (nP
i=r+1
αivi) = θY deci
nPi=r+1
αivi ∈ ker(T )⇒nP
i=r+1
αivi =rP
i=1
βivi ⇒nP
i=r+1
αivi −rP
i=1
βivi = θX.
Deoarece {v1,v2, . . . ,vr,vr+1,vr+2, . . . ,vn} este un sistem de vectori liniar indepen-dent, rezulta αr+1 = . . . = αn = β1 = . . . = βr = 0, deci vectori {T (vr+1), . . . , T (vn)} suntliniar independenti.Fie w ∈ Im(T ) arbitrar. Demonstram ca vectorii sistemului (w, T (vr+1), . . . , T (vn))
sunt liniar dependenti. Deoarece w ∈ Im(T ) rezulta ca exista v ∈ X astfel ıncat T (v) = w.Dar v =
rPi=1
αivi +nP
i=r+1
αivi de unde rezulta ca
w = T (v) =rX
i=1
αiT (vi) +nX
i=r+1
αiT (vi),
deci w =nP
i=r+1
αiT (vi), deoarece vi ∈ ker(T ), i = 1, r. Rezulta ca orice vector din Im(T ) se
poate scrie ca o combinatie liniara de vectori din sistemul de vectori (T (vr+1), . . . , T (vn)) ,deci am demonstrat ca avem ın Im(T ), n− r vectori liniar independenti iar orice n− r+ 1vectori sunt liniar dependenti.Rezulta ca vectorii Im(T ) formeaza o baza ın (T (vr+1), . . . , T (vn)) , deci rang(T ) =
n− r⇒ rang(T ) + def(T ) = n.¥

34 CAPITOLUL 3. TRANSFORMARI LINIARE
Exercitiul 3.2 Fie transformarea liniara T : R3 → R2, definita prin T (x) = (x1+2x3, x1+x2 − x3), ∀x = (x1, x2, x3) ∈ R3. Sa se verifice teorema rangului.
Rezolvare. Determinam nucleul lui T. T (x) = θR ⇒½
x1 + 2x3 = 0x1 + x2 − x3 = 0
⇒µ1 0 21 1 −1
¶∼µ1 0 20 1 −3
¶⇒½
x1 = −2x3x2 = −3x3
.
Rezulta x ∈ ker(T )⇔ x = α(−2,−3, 1), x3 = α ∈ R, deci def(T ) = 1.Determinam imaginea lui T. T (x) = y⇔
½x1 + 2x3 = y1
x1 + x2 − x3 = y2⇒µ
1 0 21 1 −1
y1y2
¶∼µ1 0 20 1 −3
y1y2 − y1
¶⇒ Sistemul este compatibil nedeterminat,
orcare ar fi y ∈ R. Rezulta Im(T ) = R2.⇒ rang(T ) = 2.Cum n = dimR R3 = 3⇒ rang(T ) + def(T ) = 1 + 2 = 3 si teorema este verificata.
3.4 Spatii liniare izomorfe
Definitia 3.8 Doua spatii liniare (X,+, ·,K) si (Y,+, ·,K) se numesc spatii liniare izo-morfe daca exista un izomorfism T ∈ L(X,Y). Vom nota X ' Y.
Teorema 3.11 Fie (X,+, ·,K) un spatiu liniar de dimensiune n. Atunci au loc afirmatiile:a) X ' Kn.b) Daca (Y,+, ·,K) si (Z,+, ·,K) sunt spatii liniare, atunci Y ' Z daca si numai daca
dimK Y = dimK Z.
Teorema 3.12 Daca (X,+, ·,K), (Y,+, ·,K), dimK X = n, dimK Y = m atunci
L(X,Y)'Mm×n(K).
Din acest rezultat tragem concluzia ca putem studia proprietatile unei transformariliniare studiind proprietatile matricei atasate ei. Astfel, de exemplu, daca (X,+, ·,K) si(Y,+, ·,K) doua spatii liniare, dimK X = n,dimK Y = m si T ∈ L(X,Y) iar S1 si S2 suntdoua baze ın X respectiv Y si P =S1 (T )S2. Atunci au loc afirmatiile:a) T este aplicatie injectiva daca si numai daca rang(P) = n, n ≤ m.(n este numarul de
coloane ale matricei P)b) T este aplicatie surjectiva daca si numai daca rang(P) = m,m ≤ n.(m este numarul
de linii ale matricei P)c) T este aplicatie bijectiva daca si numai daca rang(P) = n, n = m.( matricea P este
o matrice patratica nesingulara).
Capitolul 4
VALORI SI VECTORI PROPRII
4.1 Diagonalizarea matricelor
Problema: data matricea A ∈Mn(R), sa se determine o matrice nesingulara P ∈Mn(R)astfel ıncat matricea B = P−1 ·A ·P sa aiba o ”forma cat mai simpla”. Pentru a rezolvaaceasta problema introducem notiunile: valoare proprie, vector propriu, polinom caracter-istic etc.
Definitia 4.1 Fie matricea A = (aij)i,j=1,n ∈ Mn(R). Vectorul coloana x =
⎛⎜⎝ x1...xn
⎞⎟⎠ ∈Mn×1(R) pentru care exista λ ∈ R astfel ıncat: Ax = λx, x 6= θMn×1(R) se numeste vectorpropriu al matricei A, iar λ valoare proprie a matricei A.
Multimea valorilor λ ∈ R care sunt valori proprii ale matricei A se numeste spectrullui A si se noteaza σ(A). Raza spectrala a matricei A este numarul real pozitiv ρ(A) =max {|λ| , λ ∈ σ(A)} .Notam cu Sλ(A) = {x|x ∈ Mn×1(R) : Ax = λx} multimea vectorilor proprii ai
matricei A corespunzatori valorii proprii λ la care este adaugat si vectorul nul.
Teorema 4.1 Fie matricea A ∈Mn(R).a) Multimea Sλ(A) are structura de subspatiu liniar al spatiului liniarMn×1(R).b) Subspatiile proprii corespunzatoare valorilor proprii distincte nu au ın comun decat
vectorul nul, adica daca λ1 6= λ2 ⇒ Sλ1(A) ∩ Sλ2(A) =©θMn×1(R)
ª.
Demonstratie. a) Observam din definitia lui Sλ(A) ca ın aceasta multime este inclus sivectorul coloana nul θMn×1(R). Demonstram ca Sλ(A) este subspatiu liniar folosind teoremade caracterizare a subspatiilor liniare.Fie x,y ∈ Sλ(A) ⇒ Ax = λx, Ay = λy si fie α ∈ R, A(αx+ y) = αAx + Ay =
α(λx) + λy = λ(αx+ y)⇒ αx+ y ∈ Sλ(A).b) Fie valorile proprii distincte λ1 si λ2 si Sλ1(A), Sλ2(A) subspatiile proprii corespunza-
toare. Presupunem ca exista x ∈ Sλ1(A) ∩ Sλ2(A),x 6= θMn×1(R). Rezulta Ax = λ1x si
35

36 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Ax = λ2x deci λ1x = λ2x ⇒ (λ1 − λ2)x = θMn×1(R), λ1 6= λ2 ⇒ x = θMn×1(R), ceea cecontrazice ipoteza.¥
Observatia 4.1 Ecuatia matriceala Ax = λx,x 6= θMn×1(R) este echivalenta cu (A −λIn)x = θMn×1(R) si echivalenta cu sistemul liniar omogen⎧⎪⎪⎨⎪⎪⎩
(a11 − λ)x1 + a12x2 + ...+ a1nxn = 0a21x1 + (a22 − λ)x2 + ...+ a2nxn = 0
......an1x1 + an2x2 + ...+ (ann − λ)xn = 0
(4.1)
care are solutii nebanale daca si numai daca det(A− λIn) = 0, unde
det(A− λIn) =
¯¯¯a11 − λ a12 · · · a1na21 a22 − λ · · · a2n...
...an1 an2 · · · ann − λ
¯¯¯ . (4.2)
Definitia 4.2 Fie A ∈ Mn(R). Polinomul P (λ) = det(A − λIn) se numeste polinomcaracteristic al matricei A, iar ecuatia P (λ) = 0 se numeste ecuatie caracteristica amatricei A. Radacinile ecuatiei caracteristice poarta denumirea de radacini caracter-istice ale matricei A. Valorile proprii ale matricei A sunt radacinile caracteristice dinR.
Exemplul 4.1 Fie matricea A ∈M3(R). Sa se determine valorile proprii ale matricei:
A =
⎛⎝ 1 0 00 0 −10 1 0
⎞⎠ .
Rezolvare. Calculam det(A− λI3) = det
⎡⎣⎛⎝ 1 0 00 0 −10 1 0
⎞⎠− λ
⎛⎝ 1 0 00 1 00 0 1
⎞⎠⎤⎦ ==
¯¯ −λ+ 1 0 0
0 −λ −10 1 −λ
¯¯ = λ2 − λ− λ3 + 1 = (1− λ) (λ2 + 1) .
Ecuatia caracteristica este λ2 − λ − λ3 + 1 = 0. Radacinile ecuatiei caracteristice suntλ = 1, λ = ±i. Matricea A are numai valoarea proprie λ = 1 ∈ R, λ = ±i /∈ R si deci nueste valoare proprie.¨In situatii generale, valorile proprii ale unei matrice nu sunt usor de determinat. Sunt si
cazuri ın care determinantul din definitia polinomului caracteristic se poate calcula relativusor. Se includ aici matricele diagonale, matricele triunghiulare superior sau inferior.

4.1. DIAGONALIZAREA MATRICELOR 37
Definitia 4.3 Fie A ∈Mn(R). Se numeste minor principal de ordin k al matricei Aun minor de ordin k format la intersectia a k linii si coloane cu acelasi indice.
Observatia 4.2 Fie A ∈Mn(R). Sunt Ckn minori principali de ordin k, iar suma acestora
se noteaza δk. In particular δ1 =nXi=1
aii se numeste urma (ın engleza trace) matricei A si
se noteaza Tr(A). Mai observam ca δn = det(A).
Teorema 4.2 Fie A ∈Mn(R). Au loc afirmatiile:a) Polinomul caracteristic al matricei A este un polinom de gradul n cu coeficienti din
R.b) Polinomul caracteristic are expresia
P (λ) = (−1)n(λn − δ1λn−1 + δ2λ
n−2 + ...+ (−1)nδn) (4.3)
unde: δ1 =nXi=1
aii = Tr(A) (urma matricei A),
δ2 =
¯a11 a12a21 a22
¯+
¯a11 a13a31 a33
¯+ · · ·+
¯an−1.n−1 an−1,nan,n−1 an,n
¯· · ·
δi = suma minorilor principali de ordinul i ai matricei A.δn = det(A).
Exemplul 4.2 Sa se calculeze polinomul caracteristic al matricei
A =
⎛⎜⎜⎝1 0 2 −10 1 4 −22 −1 0 12 −1 −1 2
⎞⎟⎟⎠ .
Rezolvare. δ1 = 1 + 1 + 0 + 2 = 4
δ2 =
¯1 00 1
¯+
¯1 22 0
¯+
¯1 −12 2
¯+
¯1 4−1 0
¯+
¯1 −2−1 2
¯+
¯0 1−1 2
¯=
= 1− 4 + 4 + 4 + 0 + 1 = 6
δ3 =
¯¯ 1 0 20 1 42 −1 0
¯¯1,2,3
+
¯¯ 1 4 −2−1 0 1−1 −1 2
¯¯2,3,4
+
¯¯ 1 2 −12 0 12 −1 2
¯¯1,3,4
+
¯¯ 1 0 −10 1 −22 −1 2
¯¯1,2,4
= 4
δ4 = det(A) = 1P (λ) = λ4 − 4λ3 + 6λ2 − 4λ+ 1 = (λ− 1)4¨
Teorema 4.3 Doua matrice asemenea au aceleasi valori proprii.
Demonstratie. Demonstram ca doua matrice asemenea au acelasi polinom caracteristicsi de aici va rezulta ca au aceleasi valori proprii. FieA,B ∈Mn(R) doua matrice asemenea.

38 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Atunci exista o matriceP ∈Mn(R), nesingulara astfel ıncatB = P−1AP. Folosind definitiapolinomului caracteristic obtinem:
PB(λ) = det(B− λIn) = det(P−1AP− λP−1P) = detP−1(A− λIn)P =
=det(P−1) det(A− λIn) detP = det(A− λIn) = PA(λ)deoarece det(P−1) = 1/det(P).¥
Observatia 4.3 Reciproca nu este adevarata. Faptul ca matricele au aceleasi valori proprii
este o conditie necesara, dar nu suficienta de asemanare. Consideram matricele
µ0 10 0
¶si
µ0 00 0
¶. Se observa ca fiecare are valoarea proprie 0 cu multiplicitatea 2 dar nu sunt
asemenea.
Definitia 4.4 Fie A ∈Mn(R). Daca λ este o valoare proprie a lui A, atunci dimR Sλ(A)se numestemultiplicitate geometrica a valorii proprii λ.Multiplicitatea valorii proprii λ,ca radacina a polinomului caracteristic, notatam(λ), se numestemultiplicitate algebricaa valorii proprii λ.
Observatia 4.4 Multiplicitatea geometrica este numarul maxim de vectori liniar indepen-denti din Sλ(A).
Teorema 4.4 Daca α este valoare proprie a matricei A de multiplicitate algebrica m(α),atunci dimR Sα(A) ≤ m(α).(multiplicitate geometrica este mai mica sau egala cu multiplic-itate algebrica).
Teorema 4.5 Fie matricea A ∈Mn(R). Vectorii proprii corespunzatori valorilor propriidistincte sunt liniar independenti.
Demonstratie. Fie x1,x2, ...,xp vectorii proprii corespunzatori valorilor proprii λ1, λ2, ..., λp.Vom demonstra ca daca valorile proprii λ1, λ2, ..., λp sunt distincte atunci vectorii propriicorespunzatori x1,x2, ...,xp sunt liniar independenti.Demonstratia se face prin inductie dupa p.Pentru p = 1 afirmatia este evident adevarata (avem un singur vector propriu nenul,
liniar independent).Presupunem afirmatia adevarata pentru un sistem de p− 1 vectori proprii si o demon-
stram pentru un sistem de p vectori. Fie sistemul de vectori proprii (x1,x2, ...,xp) si demon-stram ca este liniar independent. Fie (α1, ..., αp) ∈ Rp si
α1x1 + α2x2 + ...+ αpxp = θMn×1(R) (4.4)
Inmultim relatia (4.4) la stanga cu λp si obtinem:
α1λpx1 + α2λpx2 + ...+ αpλpxp = θMn×1(R). (4.5)
Pe de alta parte, daca aplicam matricea A relatiei (4.4) obtinem:

4.1. DIAGONALIZAREA MATRICELOR 39
α1Ax1 + α2Ax2 + ...+ αpAxp = θMn×1(R)sau, tinand sema ca Axi = λixi, i = 1, p,
α1λ1x1 + α2λ2x2 + ...+ αpxpvp = 0Mn×1(R). (4.6)
Scadem din (4.5) relatia(4.6) si obtinem:α1(λ1 − λp)x1 + α2(λ2 − λp)x2 + ...+ αp−1(λp−1 − λp)xp−1 = θn.Deoarece sistemul de vectori (x1,x2, ...,xp−1) este liniar independent si valorile proprii
sunt distincte, rezulta α1 = α2 = ... = αp−1. Inlocuim ın (4.4) valorile lui αi, i = 1, p− 1rezulta αpxp = 0Mn×1(R),xp 6= θMn×1(R) ⇒ αp = 0, deci sistemul de vectori (x1,x2, ...,xp)este liniar independent.¥Definitia 4.5 Se numeste matrice diagonala o matrice de forma⎛⎜⎜⎝
a11 0 ... 00 a22 ... 0.. .. .. ..0 0 .. ann
⎞⎟⎟⎠ ,
adica o matrice care are toate elementele care nu sunt pe diagonala principala egale cu zero.
Definitia 4.6 Se numeste matrice diagonalizabila orice matrice asemenea cu o matricediagonala.
Teorema 4.6 O matrice A ∈Mn(R) este diagonalizabila daca si numai daca exista obaza ınMn×1(R) formata din vectorii proprii ai matricei A.Consecinta 4.1 Daca A ∈Mn(R) are n valori proprii distincte, atunci A este diagonal-izabila.
Demonstratie. Conform Teoremei 4.5, deoarece λ1, λ2, ..., λn sunt n valori proprii distincteale lui A si (x1,x2, ...,xn) sunt vectorii proprii corespunzatori, acesti vectori sunt liniarindependenti, sunt ın numar de n, dimRMn×1(R) = n, deci constiuie o baza ınMn×1(R).Conform Teoremei 4.6 matricea A este diagonalizabila.¨Enuntam fara demonstratie urmatoarele rezultate:
Teorema 4.7 (Teorema lui Jordan) O matrice A ∈Mn(R) este diagonalizabila dacasi numai dacaa) toate radacinile polinomului caracteristic P (λ) sunt ın R,b) pentru orice valoare proprie dimR Sλ(A) = m(λ), m(λ) notand ordinul de multipli-
citate algebrica a valorii proprii λ (multiplicitatea algebrica este egala cu multiplicitateageometrica).
Exemplul 4.3 Fie matricea A ∈M3(R),
A =
⎛⎝ −3 −7 −52 4 31 2 2
⎞⎠ .
Sa se studieze daca matricea este diagonalizabila si ın caz afirmativ sa se determinematricea diagonala si matricea modala.

40 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Rezolvare. Pentru determinarea valorilor proprii si a multiplicitatilor algebricecalculam polinomul caracteristic: P (λ) = (−1)3(λ3 − δ1λ
2 + δ2λ− δ3)δ1 = −3 + 4 + 2 = 3δ2 =
¯−3 −72 4
¯+
¯4 32 2
¯+
¯−3 −51 2
¯= −12 + 14 + 8− 6− 6 + 5 = 3
δ3 = det(A) = 1P (λ) = −(λ3 − 3λ2 + 3λ− 1) = −(λ− 1)3λ1 = λ2 = λ3 = 1,m(1) = 3.Matricea are o singura valoare proprie λ = 1 cu multiplicitatea algebrica 3.Pentru determinarea vectorilor proprii si stabilirea multiplicitatilor geome-
tirce ale valorilor proprii rezolvam sistemul(A− I)x = 0R3 ⇒ x1 = −3x3, x2 = x3 ⇒
S1(A) = {x ∈ R3|x = α
⎛⎝ −311
⎞⎠} ⇒ dimR S1(A) = 1(multiplicitatea geometrica)6= 3
(multiplicitatea algebrica a radacinii). Rezulta ca matricea nu este diagonalizabila.¨
4.1.1 Cazul matricelor simetrice
Teorema 4.8 Fie A ∈Mn(R) o matrice simetrica. Atunci:a) xTAx este un numar (evident real).b) Toate valorile proprii ale matricei A sunt reale.
Demonstratie. Afirmatia a) este evidenta.b) Daca Ax =λx si alegem x astfel ıncat xTx =1, atunciλ = λxTx = xT (λx) = xTAx ∈R (datorita afirmatiei a)).¥
Teorema 4.9 Fie A ∈Mn(R) o matrice simetrica. Vectorii proprii corespunzatori valo-rilor proprii distincte sunt ortogonali.
Demonstratie. Fie λ1 6= λ2 doua valori proprii ale lui A si x ∈ Rn vector propriu,Ax = λ1x si respectiv y ∈ Rn astfel ıncat Ay = λ2y. Demonstram ca x ⊥ y .Inmultim relatia Ax = λ1x la stanga cu y
T , yTAx = yTλ1x⇔ yTAx =λ1yTx.
Transpunem relatia Ay = λ2y, tinem seama de simetria matricei A, yTA = λ2yT si
ınmultim la dreapta relatia cu x. Obtinem yTAx =λ2yTx.
Din yTAx =λ1yTx si yTAx =λ2y
Tx prin scadere obtinem (λ1 − λ2)yTx = θRn, dar
λ1 6= λ2 ⇒ yTx = hy,xi = 0⇒ x ⊥ y.
Observam ca yTx =¡y1 · · · yn
¢⎛⎜⎝ x1...xn
⎞⎟⎠ =nXi=1
yixi = hy,xi ¥
Se poate demonstra ca:
Teorema 4.10 Orice matrice reala simetrica, A ∈Mn(R), este ortogonal asemenea cu omatrice diagonala.

4.2. ALGORITMUL DE DIAGONALIZARE A UNEI MATRICI 41
Observatia 4.5 Matricea P se obtine astfel: consideram o baza ortonormata obtinuta dinvectori proprii ai matriceiA (eventual se face ortonormarea vectorilor proprii prin procedeulGram-Schmidt) si matricea ortogonala P va fi formata pe coloane din coordonatele acestorvectori ın baza canonica. Evident, matricea P nu este unica, ea depinzand de alegereabazei.
4.2 Algoritmul de diagonalizare a unei matrici
Fie matricea A ∈Mn(R).Determinarea valorilor proprii ale matricei A.Pasul 1. Determinam polinomul caracteristic P (λ) = det(A−λIn). Calculam radacinile
polinomului caracteristic. Daca exista macar o radacina care nu este ın R, conditia a) dinTeorema 4.7 nu este satisfacuta, deci algoritmul se opreste. Matricea A nu poate fi adusala forma diagonala.Daca toate radacinile polinomului caracteristic sunt ın R, trecem la Pasul 2.Pasul 2. Fie λ1, λ2, ..., λp valorile proprii distincte cu ordinele de multiplicitate algebrica
m(λ1), m(λ2), ..., m(λp).Determinarea vectorilor proprii ale matricei A.Pasul 3. Rezolvam cele p sisteme liniare si omogene(A− λiIn)x = θMn×1(R), i = 1, p.Explicitam subspatiile proprii Sλi(A) =
©x ∈Mn×1(R) :(A− λiIn)x = θMn×1(R)
ª, i =
1, p si punem ın evidenta cate o baza ın fiecare dintre ele. Calculam dimSλi(A) = ni, i =1, p.Pasul 4. Daca ni = m(λi),∀i = 1, p, matricea poate fi adusa la forma diagonala si trecem
la Pasul 5. In caz contrar conditia b) din Teorema 4.7 nu este satisfacuta, deci algoritmulse opreste.Determinarea formei diagonale.Pasul 5. Am ajuns la Pasul 5 cand conditiile Teoremei 4.7 au fost ındeplinite, matricea
A este diagonalizabila. Matricea diagonala are formaD = diag[λ1, ..., λ1| {z }, λ2, ..., λ2| {z }, ..., λp, ..., λp| {z }]
n1 ori n2 ori np oriiar vecrorii proprii sunt reuniunea bazelor din toate subspatiile proprii determinate anterior.Matricea modala P, care este si matricea de asemanare, are coloanele formate din
vectorii.proprii. Are loc relatiaD = P−1AP.
Exemplul 4.4 Fie matricea A ∈M4(R),
A =
⎛⎜⎜⎝1 0 0 10 1 0 00 0 1 −21 0 −2 5
⎞⎟⎟⎠

42 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Sa se stabilesca daca matricea este diagonalizabila si ın caz afirmativ sa se determinematricea diagonala.
Rezolvare. Pentru determinarea valorilor proprii si a multiplicitatilor algebricecalculam polinomul caracteristic:
P (λ) = (−1)4(λ4 − 8λ3 + 13λ2 − 6λ) = λ(λ− 6)(λ− 1)2Valorile proprii suntλ1 = 0,m(0) = 1,λ2 = 6,m(6) = 1,λ3 = λ4 = 1,m(1) = 2.
Pentru λ1 = 0, S0(A) = {x ∈ R4|x = α¡−1 0 2 1
¢T, α ∈ R}, dimR S1(A) = 1 =
m(0),
Pentru λ2 = 6, S6(A) = {x ∈ R4(R)|x = α¡1 0 −2 5
¢T, α ∈ R}, dimR S6(A) =
1 = m(6),Pentru λ3 = λ4 = 1,
S1(A) = {x ∈ R4|x = α
⎛⎜⎜⎝0100
⎞⎟⎟⎠+ β
⎛⎜⎜⎝2010
⎞⎟⎟⎠ , α, β ∈ R}, dimR S1(A) = 2 = m(1).
Deoarece ni = m(λi), i = 1, 2, 3, endomorfismul este diagonalizabil, iar matriceadiagonala este
D =
⎛⎜⎜⎝0 0 0 00 1 0 00 0 1 00 0 0 6
⎞⎟⎟⎠, iar matricea modala este P =⎛⎜⎜⎝−1 0 2 10 1 0 02 0 1 −21 0 0 5
⎞⎟⎟⎠ .
Exemplul 4.5 Sa se aduca la forma diagonala matricea
A =
⎛⎝ 1 0 −20 0 0−2 0 4
⎞⎠si sa se determine matricea ortogonala de asemanare.. Sa se calculeze An.
Rezolvare. Calculam polinomul caracteristic care ın acest caz se obtine mai usor folosinddefinitia:
P (λ) = det
⎛⎝ 1− λ 0 −20 −λ 0−2 0 4− λ
⎞⎠ = −λ2(λ− 5).
Obtinem: λ1 = λ2 = 0,m(0) = 2 si λ3 = 5,m(5) = 1.Determinam vectorii proprii: pentru λ1 = λ2 = 0 rezolvam sistemul Ax = θR3 folosind
transformarile elementare,⎛⎝ 1 0 −20 0 0−2 0 4
⎞⎠ ∼⎛⎝ 1 0 −20 0 00 0 0
⎞⎠⇒ x1 − 2x3 = 0, x2 ∈ R

4.2. ALGORITMUL DE DIAGONALIZARE A UNEI MATRICI 43
deci x ∈ S0(A)⇔ x =
⎛⎝ 2x3x2x3
⎞⎠ = x3
⎛⎝ 201
⎞⎠+ x2
⎛⎝ 010
⎞⎠⇒ dimR S0(A) = 2.
Pentru λ = 5 rezolvam sistemul (A− 5I3)x = θR3 folosind transformarile elementare,⎛⎝ −4 0 −20 −5 0−2 0 −1
⎞⎠ ∼⎛⎝ 1 0 1
2
0 −5 0−2 0 4
⎞⎠ ∼⎛⎝ 1 0 1
2
0 −5 00 0 0
⎞⎠ ∼⎛⎝ 1 0 1
2
0 1 00 0 0
⎞⎠⇒½
x1 +12x3 = 0
x2 = 0⇒ x ∈ S5(A)⇔ x =
⎛⎝ −12x30x3
⎞⎠ = x3
⎛⎝ −1201
⎞⎠ .
Matricea fiind simetrica este diagonalizabila.
O forma diagonala este, de exemplu,
D =
⎛⎝ 0 0 00 0 00 0 5
⎞⎠ .
Forma diagonala nu este unica. Obtinem atatea forme diagonale cate moduri diferiteavem de aranjare a valorilor proprii pe diagonala.
Baza formata din vectorii proprii este:
v1 =
⎛⎝ 201
⎞⎠ ,v2 =
⎛⎝ 010
⎞⎠ ,v3 =
⎛⎝ −1201
⎞⎠ .
Observam ca vectorii sunt ortogonali. Ii normalizam si formam matricea modala careare drept coloane vectorii proprii ortonormati.
P =
⎛⎝ 2√50 − 1√
5
0 1 01√50 2√
5
⎞⎠si
PTAP =
⎛⎝ 25
√5 0 1
5
√5
0 1 0
−15
√5 0 2
5
√5
⎞⎠⎛⎝ 1 0 −20 0 0−2 0 4
⎞⎠⎛⎝ 2√50 − 1√
5
0 1 01√50 2√
5
⎞⎠ =
⎛⎝ 0 0 00 0 00 0 5
⎞⎠ .
Calculul lui An.
Stim ca A = PDP T ⇒ A2 = PDP TPDP T = PD2P T .
Folosind inductia matematica obtinem ca: An = PDnP T .
Dar daca
D =
⎛⎝ 0 0 00 0 00 0 5
⎞⎠⇒ D2 =
⎛⎝ 0 0 00 0 00 0 5
⎞⎠⎛⎝ 0 0 00 0 00 0 5
⎞⎠ =
⎛⎝ 0 0 00 0 00 0 52
⎞⎠ · · ·Dn =
⎛⎝ 0 0 00 0 00 0 5n
⎞⎠ ,

44 CAPITOLUL 4. VALORI SI VECTORI PROPRII
An = PDnP T =
⎛⎝ 2√50 − 1√
5
0 1 01√50 2√
5
⎞⎠⎛⎝ 0 0 00 0 00 0 5n
⎞⎠⎛⎝ 25
√5 0 1
5
√5
0 1 0
−15
√5 0 2
5
√5
⎞⎠ =
=
⎛⎝ 155n 0 −2
55n
0 0 0−255n 0 4
55n
⎞⎠ =
⎛⎝ 5n−1 0 −2 · 5n−10 0 0
−2 · 5n−1 0 4 · 5n−1
⎞⎠ .
4.3 Forma Jordan
(suplimentar)
Am vazut ca nu toate matricele sunt asemenea cu o matrice diagonala. Vom cauta ıncele ce urmeaza o matrice triungiular superioara cat mai ”apropiata” de forma diagonala,rezultatul obtinut este asa zisa forma canonica Jordan.
4.3.1 Blocuri Jordan si matrice Jordan
Fie matricele
J1(λ) = (λ) ,J2(λ) =
µλ 10 λ
¶, ...,Jm(λ) =
⎛⎜⎜⎝λ 1 0 ... 0 00 λ 1 ... 0 0.. .. .. .. .. ..0 0 0 ... 0 λ
⎞⎟⎟⎠ .
Definitia 4.7 Matricea Jp(λ) ∈Mp(R), (p ≥ 1, λ ∈ K)
Jp(λ) =
⎛⎜⎜⎝λ 1 0 ... 0 00 λ 1 ... 0 0.. .. .. .. .. ..0 0 0 ... 0 λ
⎞⎟⎟⎠ (4.7)
cu p linii si p coloane se numeste bloc Jordan (celula Jordan) de ordin p.
Definitia 4.8 O matrice J ∈Mn(R) de formaJ = diag [Jn1(λ1), Jn2(λ2), ..., Jnk(λk)] ,
ın care Jni(λi) ∈Mni(R),i=1, k, n1 + n2 + ... + nk = n, este un bloc Jordan, iar ordineleblocurilor ni cat si valorile λi nu sunt neaparat distincte, se numeste matrice Jordan deordin n.
Observatia 4.6 Se observa ca daca fiecare bloc Jordan Jni(λi) din Definitia 4.8 este 1-dimensional, adica ni = 1 si k = n, matricea Jordan este diagonala. Daca macar unul dinblocurile Jni(λi) are ni > 1, matricea J nu este diagonala si nu este nici diagonalizabila.

4.4. ALGORITMUL DE ADUCERE LA FORMA JORDAN 45
4.3.2 Serii de vectori proprii si vectori asociati
Definitia 4.9 Un sistem de vectori (x1,x2, ...,xp),p ≥ 1, p ∈ N dinMn×1 (R) care satisfaceconditiile
x1 6= 0n,Ax1 = λx1,Ax2 = λx2 + x1, ...,Axp = λxp + xp−1. (4.8)
se numeste serie de vector propriu si asociatii acestuia corespunzatori valorii propriiλ a matricei A, ın care x1 este vectorul propriu numit cap de serie, iar ceilalti se numescvectori asociati vectorului propriu.
Observatia 4.7 Daca p = 1 atunci seria de vectori proprii si vectori asociati este formatadintr-un singur vector propriu a matricei A.
Se pot demonstra urmatoarele rezultate:a) un sistem de vectori format dintr-o serie de vector propriu si asociatii acestuia este
liniar independent,b) daca unei serii de vector propriu si asociati ıi adaugam vectori proprii liniar independenti,
sistemul de vectori obtinut este liniar independent,c) sistemul de vectori format din toate seriile de vectori proprii si asociati (aici includem
si seriile de lungime 1 formate numai din vectorul propriu) este liniar independent.De aici rezulta ca daca numarul total de vectori proprii si asociati este egal cu numarul
de linii(sau coloane) ale matricei A, atunci acestia formeaza o baza care se numeste bazaJordan corespunzatoare matricei A.
4.4 Algoritmul de aducere la forma Jordan
Prezentam un algoritm de aducere la forma Jordan a unei matrice de ordin n cuelemente reale.Pasul 1. Determinarea radacinilor polinomului caracteristic al matricei A. Calculam
polinomul caracteristic
P (λ) = det(λI−A) = (λ− λ1)n1(λ− λ2)
n2...(λ− λp)np,
unde λ1, λ2, ..., λp sunt radacinile polinomului caracteristic, iar m(λ1),m(λ2), ...,m(λp) or-dinele de multiplicitate ale radacinilor polinomului P (λ).Pasul 2. Daca exista macar un i = 1, p astfel ıncat λi /∈ R algoritmul se opreste. In caz
contrar trecem la Pasul 3.Pasul 3. Determinarea numarului seriilor de vectori proprii si asociati. Daca toate
radacinile polinomului caracteristic sunt valori proprii, atunci pentru fiecare valoare proprieın parte λk, k = 1, p calculam
dk = n− rang(A− λkI)
si obtinem numarul de serii de vectori proprii si asociati corespunzatori valorii proprii λk.

46 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Daca dk = 1, avem o singura serie de lungime m(λk) formata dintr-un vector propriu siasociati si acestei serii ıi corespunde o celula Jordan de ordin m(λk). Trecem la Pasul 5.Daca dk = m(λk), atunci exista m(λk) serii de vectori proprii si asociati, corespunzatori
valorii proprii λk si fiecare din aceste serii este formata dintr-un singur vector. Trecem laPasul 5.Daca 1 < dk < m(λk), trecem la Pasul 4.Pasul 4. Determinarea lungimii seriilor de vectori proprii si asociati. Sunt dk serii de
vectori proprii si asociati de lungimi pe care urmeaza sa le determinam. Calculam pentruj ≥ 1,
ϕ(j, λk) = rang(A− λkI)j−1 − 2 rang(A− λkI)
j + rang(A− λkI)j+1.
Daca ϕ(j, λk) 6= 0, atunci avem ϕ(j, λk) serii de vectori proprii si asociati de lungimej. (Convenim ca puterea zero a oricarei matrice este matricea unitate a carei rang este egal
cu n). Calculul se opreste candXj
j · ϕ(j, λk) = m(λk).
Pasul 5. Determinarea seriilor de vectori proprii si asociati corespunzator valorii propriiλk.Pornim de la seria de lungime maxima. Fie aceasta lungime s. Daca v1 ∈ Kn este
vector propriu pentru matricea A corespunzator valorii proprii λk, cap de serie pentru seria(v1,v2, . . . ,vs) atunci
(A− λkIn)v1 = θ, (A− λkIn)v2 = v1, ...,
(A− λkIn)vs = vs−1.(4.9)
Inlocuind din aproape ın aproape obtinem:(A− λkIn)vs = vs−1, (A− λkIn)
2vs = vs−2,
. . . , (A− λkIn)s−1vs = v1, (A− λkIn)
svs = θ.(4.10)
Deci ultimul asociat din serie este o solutie nenula a sistemului liniar omogen(A− λIn)
svs = θ.Fie aceasta solutie vs.Observam ca (A− λIn)
s−1vs = v1 6= θ.Alegem vectorul solutie a sistemului (A−λIn)svs = θ a carui imagine prin (A−λIn)s−1
va fi un vector nenul care nu este altul decat vectorul propriu cap de serie, v1. Ceilalti vectoridin serie se determina utilizand relatiile (4.9).Trecem la seria urmatoare ın ordinea descrescatoare a lungimilor pana se epuizeaza
toate seriile corespunzatoare valorii proprii λk.Fiecarei serii de vectori proprii si asociati ıi corespunde o celula Jordan egala cu lungimea
seriei.Se reia algoritmul de la Pasul 3 pentru urmatoarea valoare proprie pana se epuizeaza
toate valorile proprii.Toate seriile de vectori proprii si asociati formeaza baza Jordan.Pasul 6. Determinarea matricei Jordan si a matricei modale.Matricea Jordan este formata din toate celulele Jordan asociate seriilor de vectori proprii
si asociati.Matricea modala P are pe coloane coordonatele vectorilor proprii si asociati, avand grija
sa le scriem ın ordinea ın care apar ın serie si ın ordinea valorilor proprii.N

4.4. ALGORITMUL DE ADUCERE LA FORMA JORDAN 47
4.4.1 Exemple
Exemplul 4.6 Fie matricea
A =
⎛⎜⎜⎝0 2 0 −11 0 0 00 1 0 00 0 1 0
⎞⎟⎟⎠.Sa se determine forma canonica Jordan si baza Jordan.
Rezolvare. Calculam polinomul caracteristic:δ1 = 0, δ2 = −2, δ3 = 0, δ4 = 1;P (λ) = (λ− 1)2(λ+ 1)2,λ1 = 1,m(1) = 2,λ2 = −1,m(−1) = 2.
A− I4 =
⎛⎜⎜⎝−1 2 0 −11 −1 0 00 1 −1 00 0 1 −1
⎞⎟⎟⎠⇒ rang(A− I4)= 3
Calculam pentru λ1 = 1, d1 = 4− rang(A− I4) = 1.Rezulta ca pentru λ1 = 1 avem o singura serie de vectori proprii si asociati, serie
de lungime m(1) = 2.Determinam capul de serie, adica vectorul propriu:
a) Calculam (A− I4)2 =
⎛⎜⎜⎝−1 2 0 −11 −1 0 00 1 −1 00 0 1 −1
⎞⎟⎟⎠⎛⎜⎜⎝−1 2 0 −11 −1 0 00 1 −1 00 0 1 −1
⎞⎟⎟⎠ =
=
⎛⎜⎜⎝3 −4 −1 2−2 3 0 −11 −2 1 00 1 −2 1
⎞⎟⎟⎠.Determinam solutiile sistemului⎛⎜⎜⎝
3 −4 −1 2−2 3 0 −11 −2 1 00 1 −2 1
⎞⎟⎟⎠⎛⎜⎜⎝
x1x2x3x4
⎞⎟⎟⎠ =
⎛⎜⎜⎝0000
⎞⎟⎟⎠⎛⎜⎜⎝
3 −4 −1 2−2 3 0 −11 −2 1 00 1 −2 1
⎞⎟⎟⎠ L1↔L3∼
⎛⎜⎜⎝1 −2 1 0−2 3 0 −13 −4 −1 20 1 −2 1
⎞⎟⎟⎠L2 + 2L1 → L2L3 − 3L1 → L3∼
⎛⎜⎜⎝1 −2 1 00 −1 2 −10 2 −4 20 1 −2 1
⎞⎟⎟⎠ L2→−L2∼
⎛⎜⎜⎝1 −2 1 00 1 −2 10 2 −4 20 1 −2 1
⎞⎟⎟⎠L1 + 2L2 → L1L3 − 2L2 → L3L4 − L2 → L4∼
⎛⎜⎜⎝1 0 −3 20 1 −2 10 0 0 00 0 0 0
⎞⎟⎟⎠

48 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Rezulta u =
⎛⎜⎜⎝3α− 2β2α− βαβ
⎞⎟⎟⎠ = α
⎛⎜⎜⎝3210
⎞⎟⎟⎠ + β
⎛⎜⎜⎝−2−101
⎞⎟⎟⎠ , de unde u11 =
⎛⎜⎜⎝3210
⎞⎟⎟⎠ ,u12 =
⎛⎜⎜⎝−2−101
⎞⎟⎟⎠
Calculam z11 = (A− I4)u11 =
⎛⎜⎜⎝−1 2 0 −11 −1 0 00 1 −1 00 0 1 −1
⎞⎟⎟⎠⎛⎜⎜⎝3210
⎞⎟⎟⎠ =
⎛⎜⎜⎝1111
⎞⎟⎟⎠ ,
z12 = (A− I4)u12 =
⎛⎜⎜⎝−1 2 0 −11 −1 0 00 1 −1 00 0 1 −1
⎞⎟⎟⎠⎛⎜⎜⎝−2−101
⎞⎟⎟⎠ =
⎛⎜⎜⎝−1−1−1−1
⎞⎟⎟⎠ .
Observam ca (z11, z12) sunt liniar dependenti, de aceea vom considera unul din cei doi
vectori drept cap de serie.
Capul de serie (vectorul propriu corespunzator valorii proprii 1) va fi, de exemplu,
v11 =
⎛⎜⎜⎝1111
⎞⎟⎟⎠ , iar vectorul propriu asociat va fi v12 = u12 sau u
11. Consideram, de exemplu,
v12 = u12(baza Jordan nu este unica)
Concluzie: pentru valoarea proprie 1 avem o serie de un vector propriu si un asociat,(v11,v
12) si ei ıi corespunde o celula Jordan de ordin 2.
Calculam pentru λ1 = −1, d2 = 4− rang(A+ I4).
A+ I4 =
⎛⎜⎜⎝1 2 0 −11 1 0 00 1 1 00 0 1 1
⎞⎟⎟⎠,⇒rang(A+ I4)= 3Rezulta ca pentru λ1 = 1 avem o singura serie de vectori proprii si asociati, serie
de lungime 2.
Calculam capul de serie:
Calculam (A+ I4)2 =
⎛⎜⎜⎝1 2 0 −11 1 0 00 1 1 00 0 1 1
⎞⎟⎟⎠⎛⎜⎜⎝1 2 0 −11 1 0 00 1 1 00 0 1 1
⎞⎟⎟⎠ =
⎛⎜⎜⎝3 4 −1 −22 3 0 −11 2 1 00 1 2 1
⎞⎟⎟⎠.Determinam solutiile sistemului

4.4. ALGORITMUL DE ADUCERE LA FORMA JORDAN 49⎛⎜⎜⎝3 4 −1 −22 3 0 −11 2 1 00 1 2 1
⎞⎟⎟⎠⎛⎜⎜⎝
x1x2x3x4
⎞⎟⎟⎠ =
⎛⎜⎜⎝0000
⎞⎟⎟⎠.⎛⎜⎜⎝3 4 −1 −22 3 0 −11 2 1 00 1 2 1
⎞⎟⎟⎠ L1↔L3∼
⎛⎜⎜⎝1 2 1 02 3 0 −13 4 −1 −20 1 2 1
⎞⎟⎟⎠L2 − 2L1 → L2L3 + 3L1 → L3∼
⎛⎜⎜⎝1 2 1 00 −1 −2 −10 −2 −4 −20 1 2 1
⎞⎟⎟⎠
L2→−L2∼
⎛⎜⎜⎝1 2 1 00 1 2 10 −2 −4 −20 1 2 1
⎞⎟⎟⎠L1 − 2L2 → L1L3 + 2L2 → L3L4 − L2 → L4∼
⎛⎜⎜⎝1 0 −3 −20 1 2 10 0 0 00 0 0 0
⎞⎟⎟⎠ .
Rezulta u =
⎛⎜⎜⎝3α+ 2β−2α− βαβ
⎞⎟⎟⎠ = α
⎛⎜⎜⎝3−210
⎞⎟⎟⎠+ β
⎛⎜⎜⎝2−101
⎞⎟⎟⎠ , de unde u21 =
⎛⎜⎜⎝3−210
⎞⎟⎟⎠ ,u22 =
⎛⎜⎜⎝2−101
⎞⎟⎟⎠ .
Calculam z21 = (A+ I4)u21 =
⎛⎜⎜⎝1 2 0 −11 1 0 00 1 1 00 0 1 1
⎞⎟⎟⎠⎛⎜⎜⎝3−210
⎞⎟⎟⎠ =
⎛⎜⎜⎝−11−11
⎞⎟⎟⎠ ;
z22 = (A+ I4)u22 =
⎛⎜⎜⎝1 2 0 −11 1 0 00 1 1 00 0 1 1
⎞⎟⎟⎠⎛⎜⎜⎝2−101
⎞⎟⎟⎠ =
⎛⎜⎜⎝−11−11
⎞⎟⎟⎠ .
Observam ca (z21, z22) sunt liniar dependenti (identici), de aceea vom considera unul din
cei doi vectori.
Capul de serie (vectorul propriu corespunzator valorii proprii -1) va fi v21 =
⎛⎜⎜⎝−11−11
⎞⎟⎟⎠ ,
iar vectorul propriu asociat va fi, de exemplu, v22 = u21.
Concluzie: pentru valoarea proprie −1 avem o serie de un vector propriu si un asociat,(v21,v
22) si ei ıi corespunde o celula Jordan de ordin 2.
Matricea Jordan va fi J =
⎛⎜⎜⎝1 1 0 00 1 0 00 0 −1 10 0 0 −1
⎞⎟⎟⎠ iar matricea modala

50 CAPITOLUL 4. VALORI SI VECTORI PROPRII
P =
⎛⎜⎜⎝1 3 −1 21 2 1 −11 1 −1 01 0 1 1
⎞⎟⎟⎠ .¨
Exemplul 4.7 Fie matricea
A =
⎛⎜⎜⎝2 0 0 01 3 1 10 0 1 −1−1 −1 0 2
⎞⎟⎟⎠.Sa se determine forma canonica Jordan si baza Jordan.
Rezolvare.Calculam polinomul caracteristic:δ1 = 8, δ2 = 24, δ3 = −32, δ4 = 16;P (λ) = (λ− 2)4,λ1 = 2,m(1) = 4.
A− 2I4 =
⎛⎜⎜⎝2 0 0 01 3 1 10 0 1 −1−1 −1 0 2
⎞⎟⎟⎠− 2⎛⎜⎜⎝1 0 0 00 1 0 00 0 1 00 0 0 1
⎞⎟⎟⎠ =
⎛⎜⎜⎝0 0 0 01 1 1 10 0 −1 −1−1 −1 0 0
⎞⎟⎟⎠,rang(A− 2I4)= 2Calculam pentru λ1 = 2, d1 = 4− rang(A− I4) = 2.Rezulta ca pentru λ1 = 2 avem doua serii de vectori proprii si asociati, serii de
lungime necunoscuta. Pot fi doua serii de lungime doi sau o serie de lungime doi si una delungime trei. Calculam lungimile seriilor. Pentrua aceasta calculam
(A− 2I4)2 =
⎛⎜⎜⎝0 0 0 01 1 1 10 0 −1 −1−1 −1 0 0
⎞⎟⎟⎠⎛⎜⎜⎝
0 0 0 01 1 1 10 0 −1 −1−1 −1 0 0
⎞⎟⎟⎠ =
⎛⎜⎜⎝0 0 0 00 0 0 01 1 1 1−1 −1 −1 −1
⎞⎟⎟⎠rang(A− 2I4)2=1
(A− 2I4)3 =
⎛⎜⎜⎝0 0 0 00 0 0 01 1 1 1−1 −1 −1 −1
⎞⎟⎟⎠⎛⎜⎜⎝
0 0 0 01 1 1 10 0 −1 −1−1 −1 0 0
⎞⎟⎟⎠ =
⎛⎜⎜⎝0 0 0 00 0 0 00 0 0 00 0 0 0
⎞⎟⎟⎠rang(A− 2I4)3= 0⇒rang(A− 2I4)k = 0, k ≥ 3ϕ(1, 2) = rang(A− 2I)0 − 2 rang(A− 2I)1 + rang(A− 2I)2 = 4− 2 · 2 + 1 = 1,
deci avem o serie de lungime 1 si implicit a doua serie este de lungime trei. Nu mai estenevoie sa aplicam formula de mai sus pentru determinarea lungimii seriei.Matricea Jordan va fi formata dintr+un bloc Jordan de ordin trei si un bloc Jordan de
ordin unu. O forma Jordan este, de exemplu,
J =
⎛⎜⎜⎝2 1 0 00 2 1 00 0 2 00 0 0 2
⎞⎟⎟⎠ .

4.4. ALGORITMUL DE ADUCERE LA FORMA JORDAN 51
Daca trebuie si calculam si matricea modala, trebuie sa determinam seriile de vectoriproprii si asociati.
Determinam capul de serie pentru seria de lungime trei, adica vectorul propriu:
a) Calculam (A− 2I4)3 =
⎛⎜⎜⎝0 0 0 00 0 0 00 0 0 00 0 0 0
⎞⎟⎟⎠⇒ ker(A− I4)3 = Rn
O baza ın ker(A− I4)3 este baza canonica, deci calculam
Calculam (A− 2I4)2e1 =
⎛⎜⎜⎝0 0 0 00 0 0 01 1 1 1−1 −1 −1 −1
⎞⎟⎟⎠⎛⎜⎜⎝1000
⎞⎟⎟⎠ =
⎛⎜⎜⎝001−1
⎞⎟⎟⎠ ,
(A− 2I4)2e2 =
⎛⎜⎜⎝0 0 0 00 0 0 01 1 1 1−1 −1 −1 −1
⎞⎟⎟⎠⎛⎜⎜⎝0100
⎞⎟⎟⎠ =
⎛⎜⎜⎝001−1
⎞⎟⎟⎠ .
(A− 2I4)2e3 =
⎛⎜⎜⎝0 0 0 00 0 0 01 1 1 1−1 −1 −1 −1
⎞⎟⎟⎠⎛⎜⎜⎝0010
⎞⎟⎟⎠ =
⎛⎜⎜⎝001−1
⎞⎟⎟⎠
(A− 2I4)2e4 =
⎛⎜⎜⎝0 0 0 00 0 0 01 1 1 1−1 −1 −1 −1
⎞⎟⎟⎠⎛⎜⎜⎝0001
⎞⎟⎟⎠ =
⎛⎜⎜⎝001−1
⎞⎟⎟⎠Rezulta ca oricare ar fi vectorul din baza ker(A − 2I4)3, imaginea lui prin (A − 2I4)2
este vectorul
⎛⎜⎜⎝001−1
⎞⎟⎟⎠ care va fi cap de serie, v1 =
⎛⎜⎜⎝001−1
⎞⎟⎟⎠ , iar v3 poate fi luat oricare
din vectorii e1, e2, e3 sau e4. Alegem v3 = e1, iar din relatia Av3 = v3 + v2 ⇒ v2 =
(A− 2I4)e1 =
⎛⎜⎜⎝0 0 0 01 1 1 10 0 −1 −1−1 −1 0 0
⎞⎟⎟⎠⎛⎜⎜⎝1000
⎞⎟⎟⎠ =
⎛⎜⎜⎝010−1
⎞⎟⎟⎠ .
Deci seria de vector propriu si asociati de lungime 3 va fi:⎛⎜⎜⎝v1 =⎛⎜⎜⎝
001−1
⎞⎟⎟⎠ ,v2 =
⎛⎜⎜⎝010−1
⎞⎟⎟⎠ ,v3 =
⎛⎜⎜⎝1000
⎞⎟⎟⎠⎞⎟⎟⎠ .
Seria de lungime 1 va fi formata dintr-un vector propriu. Determinam vectorrii proprii,

52 CAPITOLUL 4. VALORI SI VECTORI PROPRII
rezolvand sistemul (A − 2I4)v = θR4. Acestia vor fi
⎛⎜⎜⎝001−1
⎞⎟⎟⎠ ,
⎛⎜⎜⎝1−100
⎞⎟⎟⎠ . Vom alege ca
al patrulea vector vectorul
⎛⎜⎜⎝1−100
⎞⎟⎟⎠ , care ımpreuna cu vectorii (v1,v2,v3) sa fie liniar
independenti.
Matricea modala va fi P =
⎛⎜⎜⎝0 0 1 10 1 0 −11 0 0 0−1 −1 0 0
⎞⎟⎟⎠.¨Exemplul 4.8 Fie matricea
A =
⎛⎝ 6 6 −151 5 −51 2 −2
⎞⎠ .
Sa se determine forma canonica Jordan si baza Jordan.
Rezolvare. Calculam polinomul caracteristic:
δ1 = 9, δ2 = 27, δ3 = 27;P (λ) = −(λ− 3)3λ1 = 3,m(3) = 3
Calculam pentru λ1 = 3, d1 = 3− rang(A− 3I3) = 2.Rezulta ca pentru λ1 = 2 avem doua serii de vectori proprii si asociati. Calculam
lungimea lor:
A− 3I3 =
⎛⎝ 3 6 −151 2 −51 2 −5
⎞⎠ ; (A− 3I3)2 =⎛⎝ 0 0 00 0 00 0 0
⎞⎠ ,
rang(A− 3I3) = 1, rang(A− 3I3)2 = 0ϕ(1, 3) = rang(A− 3I3)0 − 2rang(A− 3I3) + rang(A− 3I3)2 = 3− 2.1 + 0 = 1Rezulta ca avem o serie de lungime 1, deci formata dintr-un singur vector propriu.
ϕ(2, 3) = rang(A− 3I3)1 − 2rang(A− 3I3)2 + rang(A− 3I3)3 = 1− 2.0 + 0 = 1Rezulta ca avem o serie de lungime 2, deci formata dintr-un vector propriu si un asociat.
Calculul se opreste deoarece suma lungimilor seriilor de vectori proprii siasociati este egala cu 3, ordinul de multiplicitate a radacinii.
Observatie. Se putea evita calculul, deoarece ordinul de multiplicitate a radacinii 3este 3, si avand doua serii, singura posibilitate este de a avea o serie de lungime 1 si unade lungime 2.
Calculam capii de serie:
Calculam capul de serie pentru seria de lungime 2.

4.5. POLINOAME DE MATRICE 53
(A − 3I3)2x =
⎛⎝ 000
⎞⎠ ⇒ ∀x ∈R3 este solutie a sistemului, deci u11 =⎛⎝ 100
⎞⎠ , u12 =⎛⎝ 010
⎞⎠ , u13 =
⎛⎝ 001
⎞⎠sunt solutii liniar independente.Calculam z11 = (A−3I3)u11 =
⎛⎝ 311
⎞⎠ ; z12 = (A−3I3)u12 =⎛⎝ 622
⎞⎠ ; z13 = (A−3I3)u13 =⎛⎝ −15−5−5
⎞⎠ .
Observam ca (z11, z12, z
13) sunt liniar dependenti (sunt coliniari), de aceea vom considera
unul din cei doi vectori.
Presupunem ca am ales capul de serie v11 =
⎛⎝ 311
⎞⎠ , iar vectorul propriu asociat va fi:
v12 = u12 sau u
11 sau u
13. Consideram, de exemplu, v
12 = u
11(baza Jordan nu este unica)
Pentru seria de lungime 1, calculam vectorii proprii rezolvand sistemul(A− 3I3)w = 03
Vom obtine: w1 =
⎛⎝ 501
⎞⎠ si w2 =
⎛⎝ −210
⎞⎠ .
Concluzie: pentru valoarea proprie 3 avem o serie de un vector propriu si un asociat,(v11,v
12) si ei ıi corespunde o celula Jordan de ordin 2 si o serie formata numai dintr-un
vector propriu. Pe acesta ıl alegem dintre vectorii w1 sau w2 astfel ıncat cei trei vectori sa
fie liniar independenti. Fie astfel vectorul v21 =
⎛⎝ 501
⎞⎠ . Acestora le corespunde o celula
Jordan de ordin doi si una de ordin 1.
Matricea Jordan este J =
⎛⎝ 3 1 00 3 00 0 3
⎞⎠ iar matricea modala este P =
⎛⎝ 3 1 51 0 01 0 1
⎞⎠ .
4.5 Polinoame de matrice
Definitia 4.10 Fie Q ∈ Rm [x] :Q(x) = a0x
m + a1xm−1 + · · ·+ am−1x+ am, a0 6= 0.
Fie A ∈Mn(R). Matricea notata Q(A), definita prin:Q(A) = a0A
m + a1Am−1 + · · ·+ am−1A+ amIn
se numeste polinom de matrice A definit de Q.
Observatia 4.8 Evident Q(A) ∈Mn(R).

54 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Teorema 4.11 (Teorema Cayley-Hamilton)Orice matrice A ∈ Mn(R) verifica propriul sau polinom caracteristic, adica daca
PA(λ) = det(A− λIn), atunci PA(A) = 0.
Demonstratie.Fie A ∈Mn(R). Stim ca AA∗ = det(A)In, unde matricea A
∗ este adjuncta matriceiA. Fie PA(λ) = det(A− λIn) polinomul sau caracteristic. Avem deci
(A− λIn)(A− λIn)∗ = PA(λ)In (4.11)
Matricea (A − λIn) are ca elemente polinoame de grad cel mult 1, (A − λIn)∗ este o
matrice care are ca elemente polinoame de grad cel mult n− 1, iar PA(λ)In este o matriceavand elemente de grad cel mult n. Deci(A− λIn)
∗ = Bn−1λn−1 +Bn−2λ
n−2 + · · ·+B1λ+B0unde Bi ∈Mn(R),i = 0, n− 1.FiePA(λ) = det(A− λIn) = (−1)n(λn − δ1λ
n−1 + · · ·+ (−1)n−1δn−1λ+ (−1)nδn)polinomul caracteristic al matricei A (Teorema 4.2). Egalitatea (4.11) devine(A − λIn)(Bn−1λ
n−1 + Bn−2λn−2 + · · · + B1λ + B0) = (−1)n(λn − δ1λ
n−1 + · · · +(−1)n−1δn−1λ+ (−1)nδn)InsauBn−1λ
n+ (Bn−2−ABn−1)λn−1+ (Bn−3−ABn−2)λ
n−2+ · · · +(B0−AB1)λ+AB0 == ((−1)nIn)λn + ((−1)n−1δ1In)λn−1 + · · ·+ (−δn−1In)λ+ δnInPrin identificare dupa puterile lui λ rezulta:
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
Bn−1 = (−1)nIn |An
Bn−2 −ABn−1 = (−1)n−1δ1In|An−1
Bn−3 −ABn−2 = (−1)n−2δ2In|An−2
· · ·B0 −AB1 = −δn−1In |AAB0 = δnIn
(4.12)
Adunand relatiile (4.12) membru cu membru, obtinemPA(A) = 0
si demonstratia este terminata.¨
Teorema 4.12 Orice putere a matricei A de grad ≥ n, A ∈Mn(R), poate fi exprimata cao combinatie liniara de puterilor matricei A mai mici sau egale decat n− 1(ca un polinommatriceal de grad mai mic sau egal cu n− 1).
Demonstratie.Fie PA(λ) = det(A−λIn) = (−1)n(λn− δ1λ
n−1+ δ2λn−2+ · · ·+ (−1)n−1δn−1λ+ (−1)nδn)
polinomul caracteristic al matricei A. Conform Teoremei 4.11 avem ca PA(A) = 0 sau

4.6. EXPONENTIALA DE ARGUMENT MATRICEAL 55
(−1)nAn + (−1)n−1δ1An−1 + (−1)n−2δ2An−2 + · · ·− δn−1A+ δnIn = 0sauAn = δ1A
n−1 − δ2An−2 + · · · (−1)n−2δn−1A+ (−1)nδnIn,
atunciAn+1 = δ1A
n−1 − δ2An−2 + · · · (−1)n−2δn−1A2 + (−1)nδnA
iar An se poate ınlocui cu valoarea anterioara. Atunci, din aproape ın aproape, rezulta caputerile An+m,m ∈ N, exprimabile cu ajutorul puterilor An−1,An−2, · · · ,A, In.¨
Exemplul 4.9 Folosind Teorema Cayley-Hamilton, sa se calculeze A−1, stiind ca
A =
⎛⎝ 1 0 07 1 0−4 −2 1
⎞⎠Rezolvare. Calculam polinomul caracteristic al matricei A, P (λ) = −(λ − 1)3. FolosindTeorema Cayley-Hamilton obtinem
P (A) = A3 − 3A2 + 3A− I3 = 0⇒ A3 − 3A2 + 3A = I3 ⇒A(A2 − 3A+ 3I3) = I3 ⇒ A−1 = A2 − 3A+ 3I3.Dar
A2 =
⎛⎝ 1 0 07 1 0−4 −2 1
⎞⎠⎛⎝ 1 0 07 1 0−4 −2 1
⎞⎠ =
⎛⎝ 1 0 014 1 0−22 −4 1
⎞⎠⇒A−1 =
⎛⎝ 1 0 014 1 0−22 −4 1
⎞⎠− 3⎛⎝ 1 0 07 1 0−4 −2 1
⎞⎠+ 3⎛⎝ 1 0 00 1 00 0 1
⎞⎠ =
⎛⎝ 1 0 0−7 1 0−10 2 1
⎞⎠ .
4.6 Exponentiala de argument matriceal
(suplimentar)Ne punem problema cum putem defini functii de matrice si anume cum putem defini
matricea f(A) ın cazul ın care f(x) este o functie indefinit derivabila oarecare. Una dinmetode este bazata pe dezvoltarea ın serie Taylor a functiei f(x), folosind notiunea, relativcomplicata de serie de matrice. Daca f(x) = ex, seria Taylor ın jurul punctului x = 0corespunzatoare este
ex = 1 +x
1!+
x2
2!+ · · ·+ xn
n!+ · · ·
si prin ınlocuire formala a lui x cu A suntem condusi la expresia:
eA = I +1
1!A+
1
2!A2 + · · ·+ 1
n!An + · · · .
Aceasta este o serie cu elemente matrici si poate fi privita ca un ansamblu de n2 seriide numere reale sau complexe.
Propozitia 4.1 Daca A,B ∈Mn(R),AB = BA, atunci eA+B = eAeB.

56 CAPITOLUL 4. VALORI SI VECTORI PROPRII
Demonstratie. Fie eA = I +1
1!A +
1
2!A2 + · · · + 1
n!An + · · · si eB = I + 1
1!B +
1
2!B2 +
· · ·+ 1
n!Bn + · · · . Folosind produsul ın sens Cauchy a doua serii, obtinem
eAeB = (I +1
1!A +
1
2!A2 + · · · + 1
n!An + · · · )(I + 1
1!B +
1
2!B2 + · · · + 1
n!Bn + · · · ) =
I+1
1!(A+B) +
1
2!(A2 + 2AB+B2)+
1
3!(A3 + 3A2B+ 3AB2 +B3) + · · · = eA+B.¥
Consecinta 4.2 Oricare ar fi t, s ∈ R, e(t+s)A = etAesA.
Demonstratie. Deoarece (tA)(sA) = (sA)(tA) relatie rezulta din propozitia 4.1.
Propozitia 4.2 Daca I ∈Mn(R), matricea unitate, atunci eI = eI.
Demonstratie. eI = I+1
1!I+
1
2!I2+ · · ·+ 1
n!In+ · · · = (1+ 1
1!+1
2!+ · · ·+ 1
n!+ · · · )I = eI.¥
Propozitia 4.3 Daca A∈Mn(R) atunci (eA)−1 = e−A.
Demonstratie. Deoarece A si −A comuta, deducem eAe−A = e−AeA = e0 = I. Deci eA
este inversabila si inversa ei este e−A.¥Ne intereseaza calculul efectiv a lui eA. Pentru aceasta consideram cazul ın care A este
matrice diagonala, A = D
D =
⎛⎜⎜⎜⎝λ1 0 · · · 00 λ2 · · · 0
· · · · · · . . . · · ·0 0 · · · λn
⎞⎟⎟⎟⎠ ,Dk =
⎛⎜⎜⎜⎝λk1 0 · · · 00 λk2 · · · 0
· · · · · · . . . · · ·0 0 · · · λkn
⎞⎟⎟⎟⎠eD = I+
1
1!D+
1
2!D2 + · · ·+ 1
n!Dn + · · · =
=
⎛⎜⎜⎜⎝1 + 1
11λ1 +
12!λ21 + · · · 0 · · · 0
0 1 + 111λ2 +
12!λ22 + · · · · · · 0
......
. . ....
0 0 · · · 1 + 111λn +
12!λ2n + · · ·
⎞⎟⎟⎟⎠=
=
⎛⎜⎜⎜⎝eλ1 0 · · · 00 eλ2 · · · 0
· · · · · · . . . · · ·0 0 · · · eλn
⎞⎟⎟⎟⎠ .
Teorema 4.13 Daca A,B ∈Mn(R), A si B sunt matrice asemenea,B =C−1AC, atunci eB = C−1eAC.

4.6. EXPONENTIALA DE ARGUMENT MATRICEAL 57
Demonstratie. Stim ca B2 = C−1A2C, . . . ,Bk = C−1AkC (inductie)
eB =∞Xk=0
1
k!Bk =
∞Xk=0
1
k!C−1AkC = C−1(
∞Xk=0
1
k!Ak)C = C−1eAC.¥
Consecinta.Daca A este diagonalizabila, D =P−1AP, atunci eA = PeDP−1.
Exercitiul 4.1 Fie matricea:
A =
⎛⎜⎜⎝1 0 0 10 1 0 00 0 1 −21 0 −2 5
⎞⎟⎟⎠Sa se calculeze eA.
Rezolvare. Polinomul caracteristic este: P (λ) = λ(λ− 1)2(λ− 6). Pentru λ = 0, vectorul
propriu este v1 =
⎛⎜⎜⎝−1021
⎞⎟⎟⎠ ; pentru λ = 1,
A− I =
⎛⎜⎜⎝0 0 0 10 0 0 00 0 0 −21 0 −2 4
⎞⎟⎟⎠, iar vectorii proprii sunt: v2 =⎛⎜⎜⎝0100
⎞⎟⎟⎠ , v3 =
⎛⎜⎜⎝2010
⎞⎟⎟⎠ .
Pentru λ = 6, A − I =
⎛⎜⎜⎝−5 0 0 10 −5 0 00 0 −5 −21 0 −2 −1
⎞⎟⎟⎠, iar vectorul propriu este: v4 =⎛⎜⎜⎝
10−25
⎞⎟⎟⎠T
.
Obtinem D =
⎛⎜⎜⎝0 0 0 00 1 0 00 0 1 00 0 0 6
⎞⎟⎟⎠ , iar
P =
⎛⎜⎜⎝−1 0 2 10 1 0 02 0 1 −21 0 0 5
⎞⎟⎟⎠ ,P−1 =
⎛⎜⎜⎝−160 1
316
0 1 0 025
0 15
0130
0 − 115
16
⎞⎟⎟⎠ .
eD =
⎛⎜⎜⎝1 0 0 00 e 0 00 0 e 00 0 0 e6
⎞⎟⎟⎠ ,
58 CAPITOLUL 4. VALORI SI VECTORI PROPRII
eA = PeDP−1 =
⎛⎜⎜⎝−1 0 2 10 1 0 03 0 1 −21 0 0 5
⎞⎟⎟⎠×⎛⎜⎜⎝1 0 0 00 e 0 00 0 e 00 0 0 e6
⎞⎟⎟⎠⎛⎜⎜⎝−180 1
418
0 1 0 01740
0 320
− 140
140
0 − 120
740
⎞⎟⎟⎠ =
=
⎛⎜⎜⎜⎜⎝18+ 17
20e+ 1
40e6 0 −1
4+ 3
10e− 1
20e6 −1
8− 1
20e+ 7
40e6
0 e 34+ 3
20e 0
−38+ 17
40e 0 3
2038− 1
40e
−18+ 1
8e6 0 1
4− 1
4e6 1
8+ 7
8e6
⎞⎟⎟⎟⎟⎠ .

Capitolul 5
FORME PATRATICE
5.1 Forme patratice
Definitia 5.1 Fie matricea A ∈Mn(R), matrice simetrica, adica A = AT . Functia
h :Mn×1 (R)→ R definita prin
h(x) = xTAx =nX
i,j=1
aijxixj
unde x =
⎛⎜⎝ x1...xn
⎞⎟⎠ ∈Mn×1 (R) , se numeste forma patratica generata de matricea
A.
Notam cu P(Mn×1 (R) ) multimea formelor patratice reale definite pe Mn×1 (R) . Deasemenea definim rangul lui h ca fiind rangul matricei A si spunem ca h este nedegeneratadaca rang h = n.
Exemplul 5.1 Forma patratica generata de matricea identitate I se reduce la produsulscalar si este patratul normei euclidiene:
h(x) = xT Ix = xTx = hx,xi = kxk2 ,∀x ∈Mn×1 (R).
Teorema 5.1 1. Suma a doua forme patratice definite pe Mn×1 (R) este o formapatratica definita peMn×1 (R) ,∀(h1, h2) ∈ P(Mn×1 (R) )
2 : h1 + h2 ∈ P(Mn×1 (R) ).2. Produsul dintre un scalar α ∈ R si o forma patratica definita pe Mn×1 (R)
este o forma patratica definita peMn×1 (R),∀(α, h) ∈ R×P(Mn×1 (R) ) : αh ∈ P(Mn×1 (R) ).3. (P(Mn×1 (R) ),+, ·,R) este spatiu liniar.
59

60 CAPITOLUL 5. FORME PATRATICE
5.2 Clasificarea formelor patratice
Definitia 5.2 Fie h ∈ P(Rn). Forma patratica h se numeste
a) pozitiv definita daca h(x) > 0,∀x ∈Mn×1 (R) \©θMn×1(R)
ª;
b) negativ definita daca h(x) < 0,∀x ∈Mn×1 (R) \©θMn×1(R)
ª;
c) pozitiv semidefinita daca h(x) ≥ 0 , ∀x ∈Mn×1 (R) si exista x0 6= θMn×1(R) astfelıncat h(x0) = 0;
d) negativ semidefinita daca h(x) ≤ 0, ∀x ∈Mn×1 (R) si exista x0 6= θMn×1(R) astfelıncat h(x0) = 0;
c) nedefinita daca exista x ∈Mn×1 (R) si y ∈Mn×1 (R) stfel ıncat h(x) > 0 si h(y) <0.
Fie h ∈ P(Mn×1 (R) ), h(x) = xTAx. Deoarece orice matrice simetrica este ortogonalasemenea cu o matrice diagonala, rezulta ca exista o matrice ortogonala P astfel ıncatD = PTAP. Atunci forma patratica poate fi scrisa astfel: h(x) = xTAx = xTPDPTx =¡PTx
¢TD¡PTx
¢. Daca notam y = PTx atunci forma patratica se scrie
h(x) = yTDy =nXi=1
λiy2i . De aici si ideea de a introduce forma canonica a unei forme
patratice.
Definitia 5.3 Se spune ca forma patratica h este redusa la forma canonica daca exista omatrice P nesingulara astfel ıncat prin transformarea x = Py forma patratica h devine deforma
h(x) =nXi=1
λiy2i , λi ∈ R,i = 1, n. (5.1)
Definitia 5.4 Fie h(x) =nXi=1
λix2i forma canonica a unei forma patratice h ın care p
coeficienti sunt strict pozitivi, q sunt strict negativi iar d = n− (p+ q) sunt nuli. Tripletul(p, q, d) se numeste signatura formei patratice h (sau forma patratica h are signatura(p, q, d)).
Teorema 5.2 Fie h ∈ P(Mn×1 (R)), rang h = r ≤ n. Daca forma patratica h are sig-natura (p, q, d) atunci h este
a) pozitiv definita daca si numai daca p = r = n;
b) negativ definita daca si numai daca q = r = n;
c) pozitiv semidefinita daca si numai daca 0 < p = r < n si q = 0;
d) negativ semidefinita daca si numai daca 0 < q = r < n si p = 0);
e) nedefinita daca si numai daca pq 6= 0.

5.3. ADUCEREA LA FORMA CANONICA A FORMELOR PATRATICE 61
Putem determina natura formei patratice si ın functie de semnul valorilor proprii alematricei:- daca toti λi > 0,∀i = 1, n atunci forma canonica este pozitiv definita,- daca toti λi < 0,∀i = 1, n atunci forma canonica este negativ definita,- daca toti λi ≥ 0,∀i = 1, n atunci forma canonica este pozitiv semidefinita,- daca toti λi ≤ 0,∀i = 1, n atunci forma canonica este negativ semidefinita iar- daca exista λi ≥ 0 si λj ≤ 0 atunci forma patratica este nedefinita. De aici rezulta ca
este esential sa aducem forma patratica la forma canonica.
5.3 Aducerea la forma canonica a formelor patratice
Teorema 5.3 (Teorema lui Gauss) Orice forma patratica admite o forma canonica.
Demonstratia teoremei lui Gauss prezinta de fapt o metoda de aducere la forma canonicacare poate fi aplicata oricarei forma patratice.Prezentam algoritmul de aducere la forma canonica prin metoda lui Gauss.
Fie A matricea formei patratice.Pasul 1. Verificam daca exista un indice i ∈ {1, 2, . . . , n} astfel ıncat aii 6= 0, adica
matricea formei patratice are un element diferit de zero pe diagonala principala. Daca da,trecem la Pasul 2. Daca toate elementele de pe diagonala principala sunt egale cu zero,trecem la Pasul 4.Pasul 2. Fara a micsora generalitatea, putem presupune ca a11 6= 0 astfel ıncat putem
scrie
h(x) =
"a11x
21 + 2
nXj=2
a1jx1xj
#+
nXi,j 6=1
aijxixj . (5.2)
Deoarece a11 6= 0 exista a−111 si atunci putem scrie (5.2) sub forma
h(x) = a11(x21+2
nXj=2
a1ja11
x1xj)+nX
i,j=2
aijxixj = a11
Ãx21 + 2x1
ÃnX
j=2
a1ja11
xj
!!+
nXi,j=2
aijxixj =
= a11
⎛⎝x21 + 2x1
ÃnX
j=2
a1ja11
xj
!+
ÃnX
j=2
a1ja11
xj
!2−Ã
nXj=2
a1ja11
xj
!2⎞⎠+ nXi,j=2
aijxixj
Adunam si scadem ın paranteza termenii potriviti pentru a obtine patratul expresieix1 +
a12a11
x2 + . . .+ a1na11
xn, adica
h(x) = a11(x1 +nX
j=2
a1ja11
xj)2 + h1(x). (5.3)
unde x =
⎛⎜⎝ x2...xn
⎞⎟⎠ . Este evident ca h1 nu contine termeni ın x1. Trecem la Pasul 3.

62 CAPITOLUL 5. FORME PATRATICE
Pasul 3. Consideram transformarea liniara⎧⎪⎨⎪⎩ y1 = x1 +nX
j=2
a1ja11
xj
yj = xj, j = 2, n
(5.4)
care scrisa matriceal devine:⎛⎜⎜⎜⎝y1y2...yn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎜⎝1
a12a11
· · · a1na11
0 1 · · · 0
· · · · · · . . . · · ·0 0 · · · 1
⎞⎟⎟⎟⎟⎠⎛⎜⎜⎜⎝
x1x2...xn
⎞⎟⎟⎟⎠,
C−11 =
⎛⎜⎜⎜⎜⎝1
a12a11
· · · a1na11
0 1 · · · 0
· · · · · · . . . · · ·0 0 · · · 1
⎞⎟⎟⎟⎟⎠ , y = C−11 x, x = C1y
Obtinem h(y) = yTCT1AC1y = a11y
21 + h1(y).
Deoarece h1 este o forma patratica ın n−1 variabile, rezulta ca putem sa-i aplicam acelasiprocedeu de cel mult n−2 ori pana fi adusa la forma canonica,(Exemplul 5.2). Algoritmul seopreste cand am obtinut forma canonica. Matricea aducerii la forma canonica P o obtinemfacand produsele matricelor Ci.Pasul 4. Presupunem ca exista aij 6= 0 pentru i 6= j (ın caz contrar, forma patratica ar
fi identic nula). Consideram ın acest caz transformarea de coordonate⎧⎨⎩ xi = yi + yjxj = yi − yjxk = yk, k 6= i, j
.⇔
⎧⎨⎩ yi =12(xi + xj)
yj =12(xi − xj)
yk = xk, k 6= i, jFaptul ca aceasta este o schimbare de coordonate rezulta din faptul ca matricea
i j
C2 =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
1 0 · · · 0 · · · 0 · · · 00 1 · · · 0 · · · 0 · · · 0· · · · · ·0 0 · · · 1 · · · 1 · · · 0· · · · · ·0 0 · · · 1 · · · −1 · · · 0· · · · · ·0 0 · · · 0 · · · 0 · · · 1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠i
j
∈Mn(R)
este inversabila (det(C2) = 1). In noul sistem de coordonate avem h(x) = aiiy2i −ajjy2j + · · ·
si reluam de la Pasul 1.(Exemplul 5.3).¥
Exemplul 5.2 Fie forma patratica h :M3×1 (R)→R definita prinh(x) = x21 + x22 + 4x1x2 + 2x1x3 − 2x2x3
si se cere sa se obtina formele canonice ale lui h folosind metoda lui Gauss.

5.3. ADUCEREA LA FORMA CANONICA A FORMELOR PATRATICE 63
Rezolvare. Matricea formei patratice este (se obtine scriind pe diagonala pe pozitiile(i, i) coeficientii lui x2i iar pe pozitiile (i, j) jumatate din coeficientii lui xixj) :
A =
⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠ .
Observam ca pe diagonala principala a matricei avem elemente diferite de zero. Grupamtermenii care-l contin pe x1 si formam un patrat perfect (urmarim algoritmul):
h(x) = (x21 + 4x1x2 + 2x1x3) + x22 − 2x2x3 = [x21 + 2x1(2x2 + x3)] + x22 − 2x2x3 =[x21 + 2x1(2x2 + x3) + (2x2 + x3)
2] − (2x2 + x3)2 + x22 − 2x2x3 = (x1 + 2x2 + x3)
2 − 3x22 −x23 − 6x2x3Facem prima schimbare de coordonate⎧⎨⎩ y1 = x1 + 2x2 + x3
y2 = x2y3 = x3
⇔
⎧⎨⎩ x1 = y1 − 2y2 − y3x2 = y2x3 = y3
⇒ C1 =
⎛⎝ 1 −2 −10 1 00 0 1
⎞⎠si deci h devine: h(x) = y21 − 3y22 − y23 − 6y2y3,x =(y1, y2, y3)C1( y1, y2, y3 sunt coordonatele vectorului x ın baza ((1, 0, 0) , (−2, 1, 0) , (−1, 0, 1)) .Grupa ın continuare termenii care-l contin pe y2h(x) = y21 − (3y22 +6y2y3)− y23 = y21 − 3(y22 +2y2y3+ y23) + 2y
23 = y21 − 3(y2+ y3)
2+2y23.
Facem schimbarea de coordonate⎧⎨⎩ z1 = y1z2 = y2 + y3z3 = y3
⇔
⎧⎨⎩ y1 = z1y2 = z2 − z3y3 = z3
⇒ C2 =
⎛⎝ 1 0 00 1 −10 0 1
⎞⎠⇔
⎧⎨⎩ x1 = z1 − 2z2 + z3x2 = z2 − z3x3 = z3
si deci
h(x) = z21 − 3z22 + 2z23 .Signatura formei patratice este (2, 1, 0) deci forma patratica este nedefinita.
Determinam matricea P.
P = C1C2 =
⎛⎝ 1 −2 −10 1 00 0 1
⎞⎠⎛⎝ 1 0 00 1 −10 0 1
⎞⎠ =
⎛⎝ 1 −2 10 1 −10 0 1
⎞⎠ .
Observam ca
PTAP =
⎛⎝ 1 0 0−2 1 01 −1 1
⎞⎠⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠⎛⎝ 1 −2 10 1 −10 0 1
⎞⎠ =
⎛⎝ 1 0 00 −3 00 0 2
⎞⎠ .¨
Exemplul 5.3 Fie forma patratica h :M3×1 (R)→R definita prinh(x) = 2x1x2 + 2x1x3Sa se aduca la forma canonica cu metoda lui Gauss.
Rezolvare. Matricea formei patratice este

64 CAPITOLUL 5. FORME PATRATICE
A =
⎛⎝ 0 1 11 0 01 0 0
⎞⎠Suntem ın cazul ın care toate elementele de pe diagonala principala a matricei sunt zero.
Avem a12 = 1 6= 0.Consideram ın acest caz transformarea de coordonate⎧⎨⎩ x1 = y1 + y2
x2 = y1 − y2x3 = y3
⇒ C1 =
⎛⎝ 1 1 01 −1 00 0 1
⎞⎠.Obtinem h(x) = 2y21 − 2y22 + 2y1y3 + 2y2y3.Grupam termenii care-l contin pe y1 si formam un patrat perfect:h(x) = (2y21 + 2y1y3)− 2y22 + 2y2y3 = 1
2(2y1 + y3)
2 − 2y22 − 12y23 + 2y2y3
Facem prima schimbare de coordonate⎧⎨⎩ z1 = 2y1 + y3z2 = y2z3 = y3
⇔
⎧⎨⎩ y1 =12(z1 − z3)
y2 = z2y3 = z3
⇒ C2 =
⎛⎝ 120 −1
2
0 1 00 0 1
⎞⎠si deci
h(z) = 12z21 − 2z22 − 1
2z23 + 2z2z3,
Grupam termenii care-l contin pe z2 si formam un patrat perfecth(x) = 1
2z21 − (2z22 − 2z2z3)− 1
2z23 =
12z21 − 1
2(4z22 − 4z2z3)− 1
2z23 =
12z21 − 1
2(2z2 − z3)
2.Facem prima schimbare de coordonate⎧⎨⎩ u1 = z1
u2 = 2z2 − z3u3 = z2
⇔
⎧⎨⎩ z1 = u1z2 =
12(u2 + u3)
z3 = u3
⇒ C3 =
⎛⎝ 1 0 00 1
212
0 0 1
⎞⎠si deci
h(x) = 12u21 − 1
2u22.
Signatura formei patratice este (1, 1, 1) deci forma patratica este nedefinita.
P = C1C2C3 =
⎛⎝ 1 1 01 −1 00 0 1
⎞⎠⎛⎝ 120 −1
2
0 1 00 0 1
⎞⎠⎛⎝ 1 0 00 1
212
0 0 1
⎞⎠ =
⎛⎝ 12
12
012−12−1
0 0 1
⎞⎠ .
Observam ca
PTAP =
⎛⎝ 12
12
012−120
0 −1 1
⎞⎠⎛⎝ 0 1 11 0 01 0 0
⎞⎠⎛⎝ 12
12
012−12−1
0 0 1
⎞⎠ =
⎛⎝ 12
0 00 −1
20
0 0 0
⎞⎠ .¨
O alta metoda de a obtine forma canonica, ın conditii mai restrictive, este metodaJacobi.
Teorema 5.4 (Teorema lui Jacobi)Fie h ∈ P(Mn×1 (R)), rang h = n o forma patratica si A matricea formei patratice.
Daca determinantii
∆1 = a11,∆2 =
¯a11 a12a21 a22
¯, ...,∆n = det(A) (5.5)

5.3. ADUCEREA LA FORMA CANONICA A FORMELOR PATRATICE 65
sunt nenuli, atunci forma canonica este h(x) =nXi=1
∆i−1
∆iy2i unde ∆0 = 1.
Algoritmul de aducere la forma canonica a unei forme patratice folosindTeorema lui Jacobi.Fie A matricea formei patratice.
Pasul 1. Calculam determinantii ∆1 = a11, ∆2 =
¯a11 a12a21 a22
¯, ... ,∆n = det(A).
Daca toti acesti determinanti sunt nenuli, trecem la Pasul 2. Daca exista macar undeterminant egal cu zero, atunci metoda Jacobi nu se poate aplica si algoritmul se opreste.
Pasul 2. Scriem forma canonica h(x) =nXi=1
∆i−1
∆iy2i , unde ∆0 = 1.
Calculul determinantilor 5.5 se face aducand matricea A la forma triunghiulara B:
B =
⎛⎜⎜⎜⎝b11 b12 · · · b1n0 b22 · · · b2n...
......
0 0 · · · bnn
⎞⎟⎟⎟⎠ .
Transformarea y = Cx se obtine astfel:⎧⎪⎪⎨⎪⎪⎩y1 = b11x1 + b12x2 + · · ·+ b1nxny2 = b22x2 + · · ·+ b2nxn
· · ·yn = bnnxn
de unde obtinem x = C−1y
Exemplul 5.4 Fie forma patratica h :M3×1 (R)→R definita prinh(x) = x21 + x22 + 4x1x2 + 2x1x3 − 2x2x3
si se cere sa se obtina formele canonice ale lui h folosind metoda lui Jacobi.
Rezolvare. Matricea formei patratice ın baza canonica este:
A =
⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠.∆0 = 1∆1 = 1∆2 = −3∆3 = −6∆i 6= 0, i = 1, 2, 3⇒ h(x) = y21 − 1
3y22 +
12y23.
Determinam transformarea y = Cx. Aducem matricea A la forma triunghiulara:⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠ L2 − 2L1 → L2L3 − L1 → L3∼
⎛⎝ 1 2 10 −3 −30 −3 −1
⎞⎠ L2+L3→L3∼
⎛⎝ 1 2 10 −3 −30 0 2
⎞⎠

66 CAPITOLUL 5. FORME PATRATICE
rezulta y =
⎛⎝ 1 2 10 −3 −30 0 2
⎞⎠x.⇔ x =
⎛⎝ 1 23
12
0 −13−12
0 0 12
⎞⎠yRezulta
CTAC =
⎛⎝ 1 0 023−130
12−12
12
⎞⎠⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠⎛⎝ 1 23
12
0 −13−12
0 0 12
⎞⎠ =
⎛⎝ 1 0 00 −1
30
0 0 12
⎞⎠ .
Teorema 5.5 (Criteriul lui Sylvester) Forma paratica h : Rn→R este pozitiv definitadaca si numai daca ∆i > 0, i = 1, n si este negativ definita daca si numai daca (−1)i∆i >0, i = 1, n .
O alta metoda de aducere a formei patratice reale la forma canonica este diagonalizareamatricei simetrice A.Algoritmul de aducere la forma canonica a unei forme patratice prin trans-
formari ortogonale.Fie A matricea formei patratice.Pasul 1. Se calculeaza valorile proprii ale matriceiA si subspatiile proprii corespunzatore.Pasul 2. Se considera o baza ortonormata ın fiecare subspatiu propriu, folosind eventual
procedeul Gram-Schmidt.Pasul 3. Valorile proprii sunt coeficientii formei canonice, iar coloanele matricei modale
sunt baza ın care forma patratica are forma canonica.
Observatia 5.1 Metoda este usor aplicabila numai ın situatia ın care valorile proprii suntıntregi sau rationale.
Exemplul 5.5 Fie forma patratica h :M3×1 (R)→R definita prinh(x) = x21 + x22 + 4x1x2 + 2x1x3 − 2x2x3
si se cere sa se obtina formele canonice ale lui h folosind metoda valorilor si a vectorilorproprii(metoda transformarilor ortogonale),
Rezolvare. Matricea formei patratice ın baza canonica este
A =
⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠, P (λ) = −(λ− 1)(λ− 3)(λ+ 2)Forma canonica esteh(x) = y21 + 3y
22 − 2y23,
Determinam matricea ortogonala P cu ajutorul careia se face (diagonalizarea) aducrea laforma canonica.
Pentru λ = 1⇒ v1 =
⎛⎝ 1−12
⎞⎠ , λ = 3⇒ v2 =
⎛⎝ 110
⎞⎠ , λ = −2⇒ v3 =
⎛⎝ −111
⎞⎠ .
Observam ca vectorii propri sunt ortogonali. Vectorii ortonormati sunt:

5.3. ADUCEREA LA FORMA CANONICA A FORMELOR PATRATICE 67
w1 =
⎛⎝ 1/√6
−1/√6
2/√6
⎞⎠ ,w2 =
⎛⎝ 1/√2
1/√2
0
⎞⎠ ,w3 =
⎛⎝ −1/√31/√3
1/√3
⎞⎠ ,
P =
⎛⎝ 1/√6 1/
√2 −1/
√3
−1/√6 1/
√2 1/
√3
2/√6 0 1/
√3
⎞⎠.Transformarea ortogonala cu ajutorul careia se obtine forma canonica este⎧⎪⎨⎪⎩
x1 =1√6y1 +
1√2y2 − 1√
2y3
x2 = − 1√6y1 +
1√2y2 − 1√
2y3
x3 =2√6y1 − 1√
2y3
Verificam
PTAP =
⎛⎝ 16
√6 −1
6
√6 1
3
√6
12
√2 1
2
√2 0
−13
√3 1
3
√3 1
3
√3
⎞⎠⎛⎝ 1 2 12 1 −11 −1 0
⎞⎠⎛⎝ 1/√6 1/
√2 −1/
√3
−1/√6 1/
√2 1/
√3
2/√6 0 1/
√3
⎞⎠ =⎛⎝ 1 0 00 3 00 0 −2
⎞⎠Exemplul 5.6 Fie forma patratica h :M3×1 (R)→R definita prin
h(x) = 2x1x2 + 2x1x3Sa se aduca la forma canonica.
Rezolvare. Metoda valorilor proprii si a vectorilor proprii.Matricea formei patratice ın baza canonica este
A =
⎛⎝ 0 1 11 0 01 0 0
⎞⎠, P (λ) = λ3 − 2λ = λ(λ−√2)(λ+
√2)
Forma canonica esteh(x) =
√2y22 −
√2y23,
unde (y1, y2, y3) reprezinta coordonatele vectorului x ın noua baza (ın care forma patraticaare forma canonica). Determinam baza ortonormata ın care forma patratica are formacanonica si tot odata matricea P, matrice modala, cu ajutorul careia se face diagonalizarea.
Pentru λ = 0⇒ v1 =
⎛⎝ 0−11
⎞⎠ , λ =√2⇒ v2 =
⎛⎝ √211
⎞⎠ ,
λ = −√2⇒ v3 =
⎛⎝ −√211
⎞⎠ .
Vectorii ortonormati sunt:
w1 =
⎛⎝ 0
−1/√2
1/√2
⎞⎠ ,w2 =
⎛⎝ 1/√2
1/21/2
⎞⎠ ,w3 =
⎛⎝ −1/√21/21/2
⎞⎠ ,

68 CAPITOLUL 5. FORME PATRATICE
P =
⎛⎝ 0 1/√2 −1/
√2
−1/√2 1/2 1/2
1/√2 1/2 1/2
⎞⎠.Transformarea ortogonala cu ajutorul careia se trece la forma canonica este⎧⎪⎨⎪⎩
x1 =1√2y2 − 1√
2y3
x2 =1√2y1 +
12y2 +
1√2y3
x3 = − 1√2y1 +
12y2 +
1√2y3
.
Verificam
PTAP =
⎛⎝ 0 −12
√2 1
2
√2
12
√2 1
212
−12
√2 1
212
⎞⎠⎛⎝ 0 1 11 0 01 0 0
⎞⎠⎛⎝ 0 1/√2 −1/
√2
−1/√2 1/2 1/2
1/√2 1/2 1/2
⎞⎠ =
=
⎛⎝ 0 0 0
0√2 0
0 0 −√2
⎞⎠ .¨
Teorema 5.6 (Teorema lui Sylvester sau teorema inertiei) Toate formele canoniceale unei forme patratice reale sunt de acelasi tip (au aceeasi signatura).
Capitolul 6
Geometrie analitica
6.1 Structura algebrica a spatiului vectorilor liberi
Consideram spatiul liniar (R3,+.·,R) ale carui elemente le numim puncte, unde R3 =©x | x = (x1, x2, x3) , xi ∈ R, i = 1, 3
ªdefinit ın capitolul Spatii vectoriale. Convenim sa
notam elementele lui R3 cu litere mari ale alfabetului latin. Fie E = R3 × R3.
Definitia 6.1 Fie punctele A,B ∈ R3. Se numeste segment orientat determinat depunctele A si B perechea ordonata de puncte (A,B). Segmentul orientat cu originea ınpunctul A si extremitatea ın punctul B se noteaza cu AB. Daca A = B segmentul orientat(A,A) se numeste segment orientat nul.
Definitia 6.2 Lungimea segmentului orientat este notata cu°°AB°° si se defineste °°AB°° =q
AB,AB®, produsul scalar fiind cel standard definit pe R3 ×R3.
Definitia 6.3 Dreapta care trece prin punctele A si B se numeste dreapta suport alsegmentului orientat AB.
Definitia 6.4 Directia segmentului orientat AB, cu A 6= B este directia dreptei determi-nata de punctele A si B si va fi notata cu dirAB.
Evident segmentul orientat AA are directia nedeterminata.Observam ca daca dirAB = dirCD atunci dreptele suport AB si CD sunt paralele sau
coincid.
Definitia 6.5 Vom spune ca vectorul AB are sensul de la A la B. Vectorii AB si BA ausensuri contrare. Vom scrie BA = −AB.
Definitia 6.6 Spunem ca segmentele orientate AB si CD cu A,B,C,D necoliniare auaceeasi orientare (Figura 7.1) daca:a) dirAB = dirCD,
69
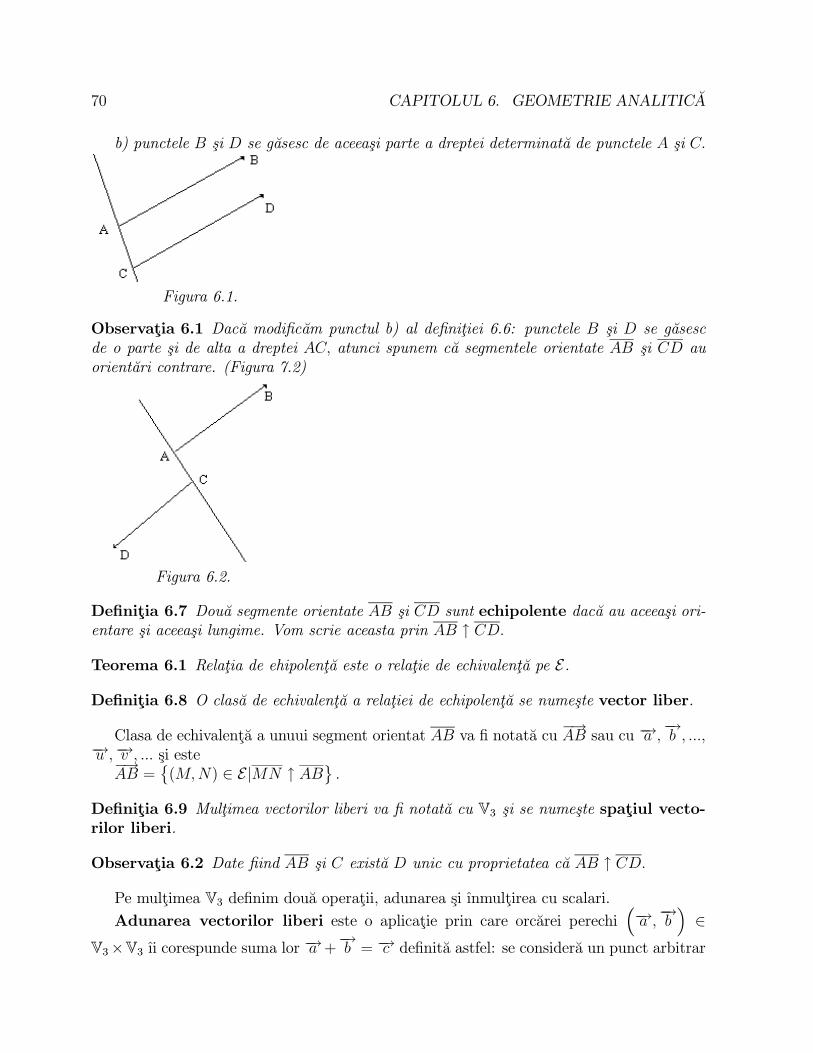
70 CAPITOLUL 6. GEOMETRIE ANALITICA
b) punctele B si D se gasesc de aceeasi parte a dreptei determinata de punctele A si C.
Figura 6.1.
Observatia 6.1 Daca modificam punctul b) al definitiei 6.6: punctele B si D se gasescde o parte si de alta a dreptei AC, atunci spunem ca segmentele orientate AB si CD auorientari contrare. (Figura 7.2)
Figura 6.2.
Definitia 6.7 Doua segmente orientate AB si CD sunt echipolente daca au aceeasi ori-entare si aceeasi lungime. Vom scrie aceasta prin AB ↑ CD.
Teorema 6.1 Relatia de ehipolenta este o relatie de echivalenta pe E.
Definitia 6.8 O clasa de echivalenta a relatiei de echipolenta se numeste vector liber.
Clasa de echivalenta a unuui segment orientat AB va fi notata cu−→AB sau cu −→a ,
−→b , ...,
−→u ,−→v , ... si este−→AB =
©(M,N) ∈ E|MN ↑ AB
ª.
Definitia 6.9 Multimea vectorilor liberi va fi notata cu V3 si se numeste spatiul vecto-rilor liberi.
Observatia 6.2 Date fiind AB si C exista D unic cu proprietatea ca AB ↑ CD.
Pe multimea V3 definim doua operatii, adunarea si ınmultirea cu scalari.
Adunarea vectorilor liberi este o aplicatie prin care orcarei perechi³−→a ,−→b´∈
V3×V3 ıi corespunde suma lor −→a +−→b = −→c definita astfel: se considera un punct arbitrar

6.1. STRUCTURA ALGEBRICA A SPATIULUI VECTORILOR LIBERI 71
A ∈ R3. Luam ca reprezentant al vectorului −→a segmentul orientat cu originea ın A si notamcu B extremitatea sa, deci AB ∈ −→a . Analog luam pentru
−→b ca reprezentant segmentul
orientat cu originea ın B si notam cu C extremitatea sa, BC ∈ −→b . Suma lor este−→a +−→b = AB +BC = AC.(Figura 6.3)Procedeul prin care am construit suma celor doi vectori se numeste regula triunghiului.
Figura 6.3.
Teorema 6.2 Adunarea ın V3 are urmatoarele proprietati:1) ∀
³−→a ,−→b´∈ V3 ×V3 : −→a +
−→b =
−→b +−→a ,
2) ∀³−→a ,−→b ,−→c
´∈ V3 ×V3 ×V3 :
³−→a +−→b
´+−→c = −→a +
³−→b +−→c
´,
3) ∃−→0 ∈ V3 : ∀−→a ∈ V3 : −→a +−→0 = −→0 +−→a = −→a ,
4) ∀−→a ∈ V3,∃−→a0 ∈ V3 : −→a +
−→a0 =
−→a0 +−→a =
−→0 ,−→a0 = −−→a .
Inmultirea vectorilor din V3 cu scalari reali este o aplicatie care duce perecheaarbitrara (λ,−→a ) ∈ R× V3 ın λ−→a ∈ V3 definit astfel:1) kλ−→a k = |λ| k−→a k ,2) pentru −→a 6= −→0 si λ > 0 vectorii λ−→a si −→a au aceeasi orientare. Pentru −→a 6= −→0 si
λ < 0 vectorii λ−→a si −→a au orientari opuse.
Teorema 6.3 Inmultirea vectorilor din V3 cu scalari reali are urmatoarele proprietati:∀(α, β,−→a ) ∈ R2 ×V3 : α(β−→a ) = (αβ)−→a ,∀(α, β,−→a ) ∈ R2 ×V3 : (α+ β)−→a = α−→a + β−→a ,
∀(α,−→a ,−→b ) ∈ R× V23 : α(−→a +
−→b ) = α−→a + α
−→b ),
∀−→a ∈ V3 : 1−→a = −→a , unde 1 este elementul neutru pentru operatia · din R.
Rezulta ca (V3,+, ·,R) este spatiu liniar.¨
Definitia 6.10 Fie A,B ∈ R3, A 6= B. MultimeanM ∈ R3 : ∃α ∈ R,−−→AM = α ·−→AB
ose
numeste dreapta din R3 care trece prin punctele distincte A,B.Vectorii α·−→AB,α ∈ R, α 6=0se numesc vectori directori ai dreptei ce trece prin punctele A,B ∈ R3. In particular−→AB 6= −→0 este un vector director al dreptei care trece prin punctele distincte A,B.
d(A,B) =nM ∈ R3 : ∃α ∈ R,−−→AM = α ·−→AB
o.

72 CAPITOLUL 6. GEOMETRIE ANALITICA
Definitia 6.11 Sistemul de vectori liberi −→a ,−→b ∈ V3 se numeste sistem de vectori
liberi coliniari daca sistemul (−→a ,−→b ) este liniar dependent, adica exista α ∈ R astfel
ıncat −→a = α−→b . Daca sistemul de vectori liberi (−→a ,
−→b ) este liniar independent atunci
vectorii −→a ,−→b se numesc necoliniari.
Definitia 6.12 Doua drepte din R3 se numesc drepte paralele daca vectorii lor directorisunt coliniari.
Definitia 6.13 Multimea dreptelor din R3 care sunt paralele cu o dreapta data se numestedirectie ın R3. Orice dreapta, element al unei directii din R3, se numeste reprezentantal acelei directii si o determina ın mod unic.
Teorema 6.4 Fie (R3,+.·,R) si (V3,+, ·,R) spatii liniare. Atunci functiaf : R3 → V3,∀A ∈ R3 : f(A) =
−→OA, unde O = (0, 0, 0) ∈ R3
este un izomorfism al spatiilor liniare R3 si V3 si dimR V3 = 3.
Teorema 6.5 Fie (R3,+.·,R) si (V3,+, ·,R) spatii liniare si sistemul³−→i ,−→j ,−→k´de vec-
tori liberi din V3 dati de−→i =
−→Oe1,
−→j =
−→Oe2,
−→k =
−→Oe3 unde (e1, e2, e3) este baza canonica
din R3. Atunci sistemul³−→i ,−→j ,−→k´este baza in V3.
Demonstratie.Folosind izomorfismul din Teorema 6.4 rezulta ca f(e1) =
−→i , f(e2) =
−→j , f(e3) =
−→k , deci (f(ej))j=1,3 este o baza ın V3. In plus, daca A =
3Xj=1
xjej ⇒−→OA = f(A) =
3Xj=1
xjf(ej) = x1−→i + x2
−→j + x3
−→k .¥
Definitia 6.14 Fie A,B,C ∈ R3 astfel ıncat vectorii −→AB si −→AC sunt necoliniari. MultimeanM ∈ R3 : ∃(α, β) ∈ R2,−−→AM = α
−→AB + β
−→ACo
se numeste plan din R3 care trece prin punctele A,B,C sau planul din R3 determinatde punctele A,B,C.
Definitia 6.15 Sistemul de vectori liberi (−→a ,−→b ,−→c ) ∈ (V3)3 se numeste sistem de
vectori liberi coplanari daca sistemul (−→a ,−→b ,−→c ) este liniar dependent, adica exista
α, β ∈ R astfel ıncat −→a = α−→b + β−→c . In caz contrat vectorii se numesc necoplanari.
Concluzie.1. Pe dreapta exista un singur vector liniar independent. Orice doi vectori sunt liniar
dependenti.2. In plan exista doi vectori liniar independenti. Orice trei vectori sunt liniar dependenti.3. In spatiu exista trei vectori liniar independenti. Orice patru vectori sunt liniar
dependenti.

6.2. SPATIUL LINIAR V3 73
6.2 Spatiul liniar V36.2.1 Produsul scalar a doi vectori liberi
Definitia 6.16 Daca −→u ,−→v ∈ V3 atunci produsul scalar al perechii ordonate de vectoriliberi (−→u ,−→v ) este definit prin
h−→u ,−→v i =½0, daca −→u =
−→0 sau −→v =
−→0 ,
k−→u k k−→v k cos^(−→u ,−→v ) daca −→u 6= −→0 si −→v 6= −→0 . (6.1)
Daca −→u ∈ V3 atunci −→u = x1−→i +x2
−→j +x3
−→k , xi ∈ R, i = 1, 3. Coordonatele (x1, x2, x3)
ale vectorului −→u ın baza (−→i ,−→j ,−→k ) se numesc coordonatele euclidiene ale vectorului
−→u , iar expresia −→u = x1−→i + x2
−→j + x3
−→k se numeste expresia analitica a vectorului −→u .
Se mai utilizeaza scrierea −→u = (x1, x2, x3).Expresia analitica a produsului scalar.Daca am fixat o orientare a spatiului liniar real V3, atunci o baza ortonormata pozitiva
ın (V3, h·, ·i) va fi notata ın mod generic prin S =(−→i ,−→j ,−→k ).
Observam ca h−→i ,−→i i = 1, h−→j ,−→j i = 1, h−→k ,−→k i = 1, h−→i ,−→j i = h−→j ,−→i i = 0, h−→i ,−→k i =
h−→k ,−→i i = 0 si h−→j ,−→k i = h−→k ,
−→j i = 1. Folosind aceste relatii si ınlocuind produsul scalar
pe −→u = x1−→i + x2
−→j + x3
−→k si −→v = y1
−→i + y2
−→j + y3
−→k , obtinem
h−→u ,−→v i = hx1−→i + x2−→j + x3
−→k , y1
−→i + y2
−→j + y3
−→k i = x1y1h−→i ,−→i i+ x1y2h−→i ,−→j i+
x1y3h−→i ,−→k i+ x2y1h−→j ,−→i i+ x2y2h−→j ,−→j i+ x2y3h−→j ,
−→k i+ x3y1h
−→k ,−→i i+ x3y2h
−→k ,−→j i+
x3y3h−→k ,−→k i = x1y1 + x2y2 + x3y3,
de unde rezulta expresia analitica a produsului scalar.
6.2.2 Produsul vectorial a doi vectori liberi
Definitia 6.17 Daca (−→u ,−→v ) ∈ (V3)2 atunci produsul vectorial a perechii ordonate devectori liberi (−→u ,−→v ) este vectorul −→u ×−→v definit prin
−→u ×−→v =
⎧⎪⎪⎨⎪⎪⎩k−→u k k−→v k sin^(−→u ,−→v )−→e daca −→u si −→v sunt necoliniari,
(si daca −→u 6= −→0 si −→v 6= −→0 )−→0
½daca −→u si −→v sunt coliniari
sau −→u =−→0 sau −→v =
−→0 ,
(6.2)
unde −→e este un versor perpendicular pe −→u si −→v astfel ıncat sistemul de vectori (−→u ,−→v ,−→e )sa fie o baza pozitiv orientata.
Teorema 6.6 Expresia analitica a produsului vectorial. Fie S =(−→i ,−→j ,−→k ) o bazaortonormata pozitiva ın V3 si fie (−→u ,−→v ) ∈ (V3)2. Daca −→u = x1
−→i + x2
−→j + x3
−→k , xi ∈
R, i = 1, 3, −→v = y1−→i + y2
−→j + y3
−→k , yi ∈ R, i = 1, 3 atunci
−→u ×−→v =
¯¯−→i−→j−→k
x1 x2 x3y1 y2 y3
¯¯ . (6.3)

74 CAPITOLUL 6. GEOMETRIE ANALITICA
Demonstratie. In demonstratie tinem seama de tabelul
× −→i
−→j
−→k
−→i
−→0
−→k −−→j
−→j −−→k −→
0−→i
−→k
−→j −−→i −→
0
.
Pentru a exemplifica cum se obtine acest tabel, calculam−→i × −→k = α
−→j , α = ±1.
Alegem α astfel ıncat (−→i ,−→k , α−→j ) sa fie orientata pozitiv, adica determinantul matricei
de trecere de la baza (−→i ,−→j ,−→k ) la baza
³−→i ,−→k , α−→j´sa fie pozitiv. Matricea de trecere
este
A =
⎛⎝ 1 0 00 0 α0 1 0
⎞⎠ ,det(A) = −α⇒ α = −1⇒−→i ×−→k = −−→j .
Atunci −→u × −→v =³x1−→i + x2
−→j + x3
−→k´×³y1−→i + y2
−→j + y3
−→k´= (x2y3 − x3y2)
−→i −
(x1y3 − x3y1)−→j + (x1y2 − x2y1)
−→k =
¯¯−→i−→j−→k
x1 x2 x3y1 y2 y3
¯¯ .¥
Teorema 6.7 Vectorul −→u ×−→v definit ın Definitia 6.17 are urmatoarele proprietati:
a) −→u ×−→v =−→0 ⇔ −→u k −→v ;
b) Daca −→u ×−→v 6= −→0 , atunci tripletul ordonat (−→u ,−→v ,−→u ×−→v ) formeaza o baza ori-entata pozitiv.
c) Daca −→u 6= θ si −→v 6= θ ⇒ k−→u ×−→v k2 = k−→u k2 k−→v k2 − h−→u ,−→v i2 (identitatea luiLagrange);
d) −→u ×−→v = −−→v ×−→u ;(proprietatea de anticomutativitate)α(−→u ×−→v ) = α−→u ×−→v = −→u × α−→v ,α ∈ R;−→u × (−→v +−→w ) = −→u ×−→v +−→u ×−→w ;
e) k−→u ×−→v k = A¤, unde A¤ reprezinta aria paralelogramului construit cu vectorii liberi−→u si −→v .
Demonstratie. Fie −→u = x1−→i + x2
−→j + x3
−→k , xi ∈ R, i = 1, 3, −→v = y1
−→i + y2
−→j +
y3−→k , yi ∈ R, i = 1, 3.
a) −→u ×−→v =−→0 ⇔
⎧⎨⎩ x2y3 − x3y2 = 0x1y3 − x3y1 = 0x1y2 − x2y1 = 0
⇔ x1y1= x2
y2= x3
y3= 1
α(cu conventia ca anularea
unui numitor este echivalenta cu anularea si a numaratorului respectiv). Rezulta y1 =
αx1, y2 = αx2, y3 = αx3 ⇒ −→v = y1−→i + y2
−→j + y3
−→k = αx1
−→i + αx2
−→j + αx3
−→k =
α(x1−→i + x2
−→j + x3
−→k ) = α−→u ⇒−→u ,−→v coliniari.
b) Vectori −→u ,−→v ,−→u × −→v sunt necoplanari deoarece −→u / −→v si −→u × −→v ⊥ −→u ,−→u ×−→v ⊥ −→v si deci formeaza o baza. Matricea de trecere de la baza S =(−→i ,−→j ,−→k ) la baza(−→u ,−→v ,−→u ×−→v ) este

6.2. SPATIUL LINIAR V3 75
A =
⎛⎝ x1 y1 x2y3 − x3y2x2 y2 x1y3 − x3y1x3 y3 x1y2 − x2y1
⎞⎠si detA = (x2y3 − x3y2)
2 + (x1y3 − x3y1)2 + (x1y2 − x2y1)
2 = k−→u ×−→v k2 > 0.c) k−→u ×−→v k2 = k−→u k2 k−→v k2 sin2^(−→u ,−→v ) = k−→u k2 k−→v k2−k−→u k2 k−→v k2 cos2^(−→u ,−→v ) =
k−→u k2 k−→v k2 − h−→u ,−→v i2.d) Rezulta utilizand relatia (6.3) si proprietatile determinantilor.e) Fie
−→OA ∈ −→u ,
−→OB ∈ −→v
Fig. 6.4
A¤ =°°°−→OA°°° · h = k−→u k (k−→v k sin^(−→u ,−→v )) = k−→u k k−→v k sin^(−→u ,−→v ) = k−→u ×−→v k .¥
6.2.3 Produsul mixt
Definitia 6.18 Fie sistemul de vectori liberi (−→u ,−→v ,−→w ) . Produsul mixt al acestui sis-tem de vectori este definit prinhh−→u ,−→v ,−→w ii = h−→u ,−→v ×−→w i.
Teorema 6.8 Fie sistemul de vectori liberi (−→u ,−→v ,−→w ) . Atuncia) Daca hh−→u ,−→v ,−→w ii = 0⇔vectorii sunt coplanari.b) Daca vectorii nu sunt coplanari, modulul produsului mixt al sistemului de vectori
(−→u ,−→v ,−→w ) , |hh−→u ,−→v ,−→w ii| , este volumul paralelipipedului construit pe cei trei vectoriaplicati ın acelasi punct.c) Daca⎧⎨⎩−→u = x1
−→i + x2
−→j + x3
−→k
−→v = y1−→i + y2
−→j + y3
−→k
−→w = z1−→i + z2
−→j + z3
−→k
atunci
hh−→u ,−→v ,−→w ii =
¯¯ x1 x2 x3y1 y2 y3z1 z2 z3
¯¯ .
d) hh−→u ,−→v ,−→w ii = hh−→v ,−→w ,−→u ii = hh−→w ,−→u ,−→v ii (produsul mixt este invariant la per-mutari circulare).
Demonstratie.

76 CAPITOLUL 6. GEOMETRIE ANALITICA
a) hh−→u ,−→v ,−→w ii = 0⇔ h−→u ,−→v ×−→w i = 0⇔
⎧⎨⎩−→u ⊥ −→v ×−→w−→v q −→w−→u =
−→0 sau −→v =
−→0 sau −→w =
−→0⇔
−→u ,−→v ,−→w sunt coplanari.b) Fie hh−→u ,−→v ,−→w ii 6= 0. Cu notatiile de mai jos, ϕ 6= 900, avemh−→u ,−→v ×−→w i = k−→u k k−→v ×−→w k cosϕ = (aria bazei)(±ınaltimea)⇒
|hh−→u ,−→v ,−→w ii| = (aria bazei)(ınaltimea) = volumul paraleleipipedului.
Figura 6.5c) hh−→u ,−→v ,−→w ii = h−→u ,−→v ×−→w i = x1(y2z3− y3z2)−x2(y1z3− y3z1)+x3(y2z1− y1z2) =¯
¯ x1 x2 x3y1 y2 y3z1 z2 z3
¯¯ .¥

Capitolul 8
CONICE SI CUADRICE
8.1 Conice pe ecuatii reduse
8.1.1 Cercul
Definitia 8.1 Fie un plan (π) si un reper ortonormat R = (O;−→i ,−→j ). Cercul este loculgeometric al punctelor din plan care au proprietatea ca sunt egal departate, de un punct fix.Punctul fix, M0(x0, y0) se numeste centrul cercului iar distanta de la punctele cercului lapunctul fix R se numeste raza cercului.
Fie M(x, y) un punct oarecare al cercului. Daca r si r0 sunt vectorii de pozitie aipunctelor M respectiv C, atunci
kr − r0k = R⇔p(x− x0)2 + (y − y0)2 = R⇔
(x− x0)2 + (y − y0)
2 = R2. (8.1)
Daca centrul cercului este ın origine, atunci ecuatia cercului va fi x2 + y2 = R2.
Teorema 8.1 O ecuatie de forma
x2 + y2 + 2ax+ 2by + c = 0 cu a2 + b2 − c > 0 (8.2)
reprezinta un cerc cu centrul ın punctul (−a,−b) si de raza R =√a2 + b2 − c.
Demonstratie. Putem scrie (x+a)2+(y+b)2+c−a2−b2 = 0,deci cu x0 = −a, y0 = −b,R2 = a2 + b2 − c > 0 obtinem (8.1).¥Ecuatia (8.2) se numeste ecuatia generala a cercului. In ecuatia generala a cercului
intervin trei parametrii a, b, c, deci un cerc este determinat de trei conditii.
95

96 CAPITOLUL 8. CONICE SI CUADRICE
Teorema 8.2 Ecuatia cercului care trece prin trei puncte necoliniare Mi(xi, yi), i = 1, 2, 3este ¯
¯ x2 + y2 x y 1
x21 + y21 x1 y1 1x22 + y22 x2 y2 1x23 + y23 x3 y3 1
¯¯ = 0. (8.3)
Demonstratie. Daca puncteleMi(xi, yi), i = 1, 2, 3 se gasesc pe cerc, atunci coordonateleacestor puncte verifica ecuatia cercului. Consideram un punct M(x, y) oarecare de pe cerc.Obtinem astfel un sistem de patru ecuatii cu trei necunoscute a, b, c⎧⎪⎪⎨⎪⎪⎩
x2 + y2 + 2ax+ 2by + c = 0x21 + y21 + 2ax1 + 2by1 + c = 0x22 + y22 + 2ax2 + 2by2 + c = 0x23 + y23 + 2ax3 + 2by3 + c = 0
.
Conditia de compatibilitate a sistemului este ca determinantul caracteristic sa fie nul,adica (8.3). Se observa ca numarul
A =
¯¯ x1 y1 1x2 y2 1x3 y3 1
¯¯
este coeficientul lui x2 + y2, deci pentru ca (8.3) sa reprezinte ecuatia unui cerc trebuie caA 6= 0, ceea ce reprezinta conditia ca cele trei puncte sa nu fie coliniare.¥Deducerea ecuatiei tangentei la cerc ıntr-un punct al sau, M1(x1, y1).Daca P (x, y) este un punct oarecare de pe tangenta, atunci vectorul
−−→CM1 = (x1 −
x0)−→i + (y1 − y0)
−→j este perpendicular pe vectorul
−−→M1P = (x− x1)
−→i + (y − y1)
−→j , adica
h−−→CM1,−−→M1P i = 0⇔ (x1 − x0)(x− x1) + (y1 − y0)(y − y1) = 0⇔
(x1 − x0) [(x− x0) + (x0 − x1)] + (y1 − y0) [(y − y0) + (y0 − y1)] = 0⇔(x1 − x0)(x− x0) + (y1 − y0)(y − y0)− [(x1 − x0)
2 + (y1 − y0)2] = 0⇔
(x1 − x0)(x− x0) + (y1 − y0)(y − y0) = R2. (8.4)
Ecuatia (8.4) se numeste ecuatia tangentei la cerc dusa printr-un punct al cer-cului obtinuta prin dedublare.Ecuatiile parametrice ale cercului:½
x = x0 +R cosϕy = y0 +R sinϕ
, ϕ ∈ [0, 2π) .Daca cercul are centrul ın origine obtinem parametrizarea:½
x = R cosϕy = R sinϕ
, ϕ ∈ [0, 2π) .
8.1.2 Elipsa
Definitia 8.2 Elipsa este locul geometric al punctelor din plan care au proprietatea casuma distantelor la doua puncte fixe, F si F 0 (numite focare), este constanta si egala cu2a, a ∈ R+.

8.1. CONICE PE ECUATII REDUSE 97
Deducerea ecuatiei elipsei.Pentru a deduce ecuatia elipsei alegem un reper preferential: originea O a reperului se
considera ın mijlocul segmentului FF 0, versorul−→i este versorul vectorului
−→OF iar versorul−→
j se alege perpendicular pe−→i ın O.
Figura 8.1
Din felul ın care am ales reperul R deducem ca−→OF = c
−→i si−−→OF 0 = −c0−→i , unde c > 0.
Deci F (c, 0), F 0(c0, 0) si daca M(x, y) este un punct al locului geometric, atunci°°°−−→MF°°°+ °°°−−→MF 0
°°° = 2a, a > 0 fixat.Rezulta
p(x− c)2 + y2+
p(x+ c)2 + y2 = 2a⇔
p(x− c)2 + y2 = 2a−
p(x+ c)2 + y2
Ridicand la patrat si efectuand simplificarile obtinem:
ap(x+ c)2 + y2 = a2 + xc. (8.5)
Pentru x > −a2
cridicam din nou la patrat si efectuand simplificarile obtinem:
(a2 − c2)x2 + a2y2 − a2(a2 − c2) = 0.
Notam a2 − c2 = b2(a > c deoarece°°°−−→MF
°°°+ °°°−−→MF 0°°° > °°°−−→FF 0
°°°) si obtinemb2x2 + a2z2 − a2b2 = 0⇔
x2
a2+
y2
b2− 1 = 0. (8.6)
Ecuatia (8.6) reprezinta ecuatia elipsei de semiaxe a si b.
Din (8.5) obtinemc
ax + a =
p(x+ c)2 + y2. Notam e =
c
a. e se numeste excentrici-
tatea elipsei si obtinem
e(x+a
e) =
p(x+ c)2 + y2. (8.7)
Observam ca e < 1, ın cazul elipsei.
x+a
ereprezinta distanta de la punctul M(x, y) la dreapta de ecuatie x = −a
e, numita
directoarea elipsei. Elipsa are doua drepte directoare de ecuatii x = −aesi x =
a
e
iar punctele elipsei se gasesc ıntre aceste drepte, x ≥ −a > −aesi x ≤ a <
a
e(a
e=
a2
c> a).
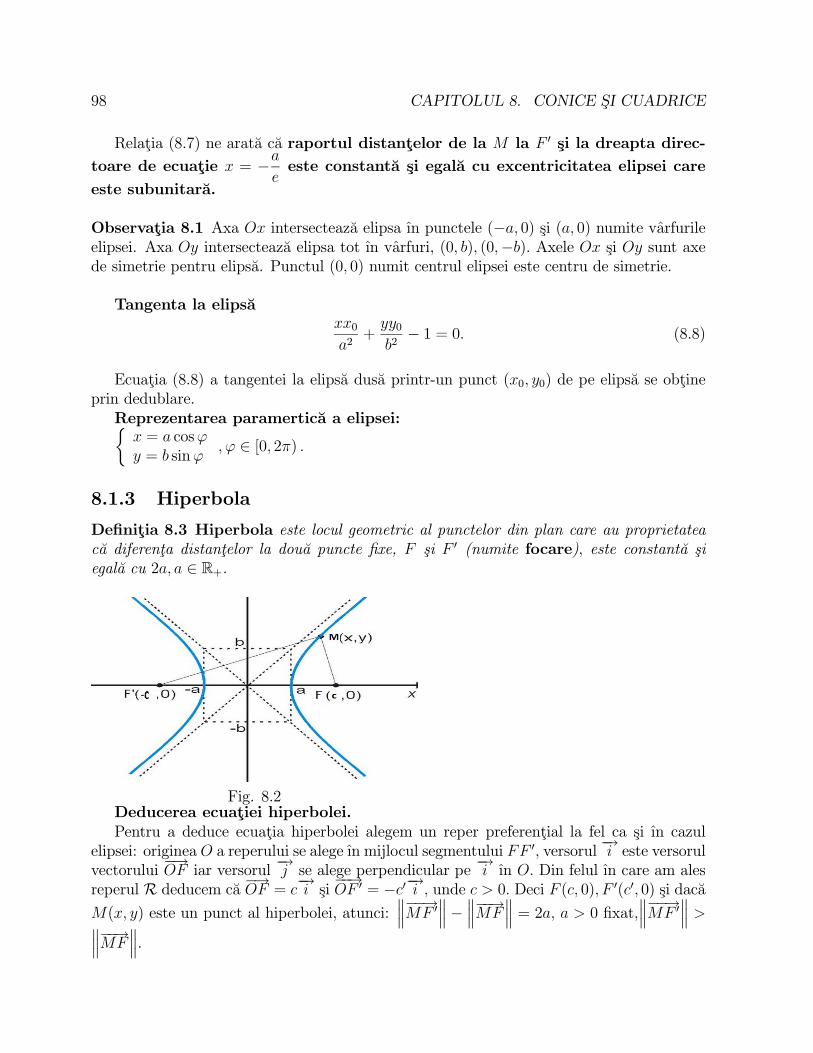
98 CAPITOLUL 8. CONICE SI CUADRICE
Relatia (8.7) ne arata ca raportul distantelor de la M la F 0 si la dreapta direc-
toare de ecuatie x = −aeeste constanta si egala cu excentricitatea elipsei care
este subunitara.
Observatia 8.1 Axa Ox intersecteaza elipsa ın punctele (−a, 0) si (a, 0) numite varfurileelipsei. Axa Oy intersecteaza elipsa tot ın varfuri, (0, b), (0,−b). Axele Ox si Oy sunt axede simetrie pentru elipsa. Punctul (0, 0) numit centrul elipsei este centru de simetrie.
Tangenta la elipsaxx0a2
+yy0b2− 1 = 0. (8.8)
Ecuatia (8.8) a tangentei la elipsa dusa printr-un punct (x0, y0) de pe elipsa se obtineprin dedublare.Reprezentarea paramertica a elipsei:½
x = a cosϕy = b sinϕ
, ϕ ∈ [0, 2π) .
8.1.3 Hiperbola
Definitia 8.3 Hiperbola este locul geometric al punctelor din plan care au proprietateaca diferenta distantelor la doua puncte fixe, F si F 0 (numite focare), este constanta siegala cu 2a, a ∈ R+.
Fig. 8.2Deducerea ecuatiei hiperbolei.Pentru a deduce ecuatia hiperbolei alegem un reper preferential la fel ca si ın cazul
elipsei: originea O a reperului se alege ın mijlocul segmentului FF 0, versorul−→i este versorul
vectorului−→OF iar versorul
−→j se alege perpendicular pe
−→i ın O. Din felul ın care am ales
reperul R deducem ca −→OF = c−→i si−−→OF 0 = −c0−→i , unde c > 0. Deci F (c, 0), F 0(c0, 0) si daca
M(x, y) este un punct al hiperbolei, atunci:°°°−−→MF 0
°°°− °°°−−→MF°°° = 2a, a > 0 fixat,
°°°−−→MF 0°°° >°°°−−→MF
°°°.

8.1. CONICE PE ECUATII REDUSE 99
Rezultap(x+ c)2 + y2−
p(x− c)2 + y2 = 2a⇔
p(x+ c)2 + y2 = 2a+
p(x− c)2 + y2.
Ridicand la patrat si efectuand simplificarile obtinem:
ap(x− c)2 + y2 = −a2 + xc. (8.9)
Pentru x > a2
cridicam din nou la patrat si efectuand simplificarile obtinem:
(a2 − c2)x2 + a2y2 − a2(a2 − c2) = 0.
Notam c2 − a2 = b2(a < c deoarece°°°−−→MF 0
°°°− °°°−−→MF°°° < °°°−−→FF 0
°°°) si obtinem:b2x2 − a2y2 − a2b2 = 0⇔
x2
a2− y2
b2− 1 = 0. (8.10)
Ecuatia (8.10) reprezinta ecuatia hiperbolei de semiaxe a si b.
Din (8.9) obtinem − c
ax− a =
p(x+ c)2 + y2. Notam e =
c
a, numita excentricitatea
hiperbolei si obtinem
−e(x+ a
e) =
p(x+ c)2 + y2. (8.11)
Observam ca e > 1, ın cazul hiperbolei.
x+a
ereprezinta distanta de la punctul M(x, y) la dreapta de ecuatie x = −a
e, numita
directoarea hiperbolei. Hiperbola are doua drepte directoare de ecuatii x = −ae
si x =a
eiar punctele hiperbolei se gasesc ın exteriorul acestor drepte, x ≤ −a < −a
esi
x ≥ a > ae(ae= a2
c< a).
Relatia (8.11) ne arata ca raportul distantelor de la M la F 0 si la dreapta direc-
toare de ecuatie x = −aeeste constanta si egala cu excentricitatea hiperbolei.
Din ecuatia (8.10) a hiperbolei obtinem: y =b
a
√x2 − a2 sau y = − b
a
√x2 − a2. Rezulta
ca dreptele y = ± b
ax sunt asimptote. Intr-adevar,m = lim
x→∞
y
x=
b
asi n = lim
x→∞
µb
a− b
ax
¶=
0. Dreptele y = ± b
ax se numesc asimptotele hiperbolei.
Tangenta la hiperbolaxx0a2− yy0
b2− 1 = 0. (8.12)
Ecuatia (8.12) a tangentei la hiperbola dusa printr-un punct (x0, y0) de pe hiperbola seobtine prin dedublare.

100 CAPITOLUL 8. CONICE SI CUADRICE
Observatia 8.2 AxaOx intersecteaza hiperbola ın punctele (−a, 0) si (a, 0) numite varfurilehiperbolei. Axa Ox se numeste axa transversa. Axa Oy nu intersecteaza hiperbola. AxeleOx si Oy sunt axe de simetrie pentru hiperbola. Punctul (0, 0) numit centrul hiperboleieste centru de simetrie.
Observatia 8.3 Hiperbola
x2
a2− y2
b2+ 1 = 0. (8.13)
este numita si hiperbola conjugata hiperbolei (8.10). Are aceleasi asimptote, aceleasi
axe. Exemplu de hiperbola conjugata:x2
32− y2
22+ 1 = 0
-4 -2 2 4
-4
-2
2
4
x
y
Figura 8.3
Daca a = b, hiperbola se numeste echilatera si are ecuatia x2−y2 = a2. Asimptotelesale sunt bisectoarele axelor, x = y si x = −y.Exemplu de hiperbola echilatera: x2 − y2 = 1
-4 -2 2 4
-4
-2
2
4
x
y
Figura 9.4
Tot hiperbola echilatera este xy = ±a2. In acest caz asimptotele hiperbolei sunt axelede coordonate.
Exemple: xy = 22 (rosu) si respectiv xy = −22(verde).

8.1. CONICE PE ECUATII REDUSE 101
4x
-5 -4 -3 -2 -1 1 2 3 4 5
-10
-5
5
x
y
Figura 8.4.Reprezentarea paramertica a hiperbolei:½
x = a chϕy = b shϕ
,ϕ ∈ R.
8.1.4 Parabola
Definitia 8.4 Parabola este locul geomertic al punctelor din plan egal departate de unpunct fix, F , numit numit focar, si o dreapta data, numita dreapta directoare.
Deducerea ecuatiei parabolei.Pentru a deduce ecuatia parabolei alegem un reper preferential: originea O a reperului
se alege ın varful parabolei, versorul−→i este versorul vectorului
−→OF iar versorul
−→j se alege
perpendicular pe−→i ın O.
Din felul ın care am ales reperul R deducem ca−→OF =
p
2−→i si dreapta directoare de
ecuatie x = −p2. Trebuie sa avem x +
p
2=
r(x− p
2)2 + y2 ⇔ x2 + px +
p2
4= x2 − px +
p2
4+ y2 ⇔
y2 = 2px. (8.14)
Tangenta la parabola
yy0 = p(x+ x0). (8.15)
Ecuatia (8.15) a tangentei la parabola dusa printr-un punct (x0, y0) de pe parabola seobtine prin dedublare.
Observatia 8.4 Excentricitatea parabolei este e = 1.Razele care pornesc din focar sunt reflectate de parabola ıntr-un fascicul paralel cu axa
Ox a parabolei. Aceasta proprietate este folosita la constructia farurilor.O reprezentare parametrica a parabolei este y = t, x = t2/(2p).

102 CAPITOLUL 8. CONICE SI CUADRICE
Figura 8.1: Figura 8.5
8.2 Conice pe ecuatii generale
Fie reperul R = (0,−→i ,−→j ) ıntr-un plan (π).
Definitia 8.5 Conica este locul georetric (Γ) al punctelor M din planul (π) ale carorcoordonate (x, y), ın raport cu reperul ortonormat R, satisfac ecuatia:
(Γ) : f(x, y) := a11x2 + 2a12xy + a22y
2 + 2a10x+ 2a20y + a00 = 0,unde a211 + a212 + a222 6= 0, aij ∈ R, i, j ∈ {0, 1, 2}. (8.16)
Matriceal, ecuatia conicei se scrie:¡x y
¢µ a11 a12a21 a22
¶µxy
¶+ 2
¡a10 a20
¢µ xy
¶+ a00 = 0
Utilizand rotatia si translatia realizam o schimbare de reper de la reperulR = (0,−→i ,−→j )la un reper adecvat orientat pozitiv, numit reper canonic, fata de care conica (8.16) sa aibacea mai simpla forma posibila, numita forma canonica.
8.2.1 Algoritmul de aducere la forma canonica a unei conice.
Pasul I. Se realizeaza rotatia sistemului de axe, R = (O,−→i ,−→j ) → R0 = (O,−→e1 ,−→e2 ),
astfel:
Fie A =
µa11 a12a12 a22
¶.
Calculam ecuatia caracteristica¯a11 − λ a12a12 a22 − λ
¯= 0⇔
λ2 − (a11 + a22)λ+ a11a22 − a212 = 0. (8.17)

8.2. CONICE PE ECUATII GENERALE 103
Corespunzator valorilor proprii λ1 si λ2 avem vectorii proprii (−→u1 ,−→u2 ). Fie −→e1 = 1k−→u1k−→u1 ,
−→e2 = 1k−→u2k−→u2 versorii vectorilor proprii. (−→e1 ,−→e2 ) dau directiile noilor axe Ox0 si respectiv
Oy0.
Daca −→e1 = a1−→i + a2
−→j ,−→e2 = b1
−→i + b2
−→j atunci matricea de rotatie
R =
µa1 b1a2 b2
¶trebuie sa indeplineasca conditia ca detR = 1 (avem ın vedere posibilitatea ınlocuirii unuiadin versori prin opusul sau sau renumerotarea acestora) pentru a fi la fel orientata cu bazacanonica.
Facem schimbarea de coordonateµxy
¶=
µa1 b1a2 b2
¶µx0
y0
¶Ecuatia conicei dupa rotatie devine
λ1x02 + λ2y
02 + 2a010x
0 + 2a020y0 + a000 = 0
Pasul II.
Efectuam translatia reperului, R0 = (O,−→e1 ,−→e2 )→ R00 = (C,−→e1 ,−→e2 ).Daca λ1λ2 6= 0 conica va fi o conica cu centru.Restrangem patratele si efectuam o translatie
λ1
µx02 + 2
a010
λ1x0 + (
a010
λ1)2¶+ λ2
µy02 + 2
a020λ2
y0 + (a020λ2)2¶+ a000−
(a010)
2
λ1− (a
020)
2
λ2= 0⇔
λ1
µx0 +
a010
λ1
¶2+ λ2
µy0 +
a020λ2
¶2+ a000 −
(a010)
2
λ1− (a
020)
2
λ2= 0
Notam⎧⎪⎪⎨⎪⎪⎩X = x0 +
a010
λ1
Y = y0 +a020λ2
si obtinem: λ1X2 + λ2Y
2 + a000 −(a
010)
2
λ1− (a
020)
2
λ2= 0 care reprezinta forma canonica a
conicei. Centrul conicei va fi⎧⎪⎪⎨⎪⎪⎩x0 = −a
010
λ1
y0 = −a020
λ2ın reperul R0 = (O,−→e1 ,−→e2 ). Coordonatele centrului conicei raportate la reperul initial,µ
x0y0
¶=
µa1 b1a2 b2
¶⎛⎜⎜⎝ −a010
λ1
−a020
λ2
⎞⎟⎟⎠reprezinta originea reperului R00 = (C,−→e1 ,−→e2 ), C(x0, y0)Discutia tipului conicei

104 CAPITOLUL 8. CONICE SI CUADRICE
λ1 λ2 a000 −(a
010)
2
λ1− (a
020)
2
λ2Tipul conicei
+ + + elipsa imaginara+ + - elipsa reala+ - hiperbola+ + hiperbola+ + 0 un punct+ - 0 doua drepte concurente- + doua drepte concurenteDesenam graficul conicei ın noul sistem de axe. (exemplele 8.1,8.2). Algoritmul se
opreste.Pasul III Daca λ1λ2 = 0. In acest caz o valoare proprie este nula deoarece.(ambele
valori proprii nu pot fi nule). Presupunem ca λ2 6= 0.Vom obtine λ2(y
0)2 + 2a010x
0 + 2a020y0 + a000 = 0. Restrangem patratele si efectuam o
translatie
λ2
Ãy02 + 2
a020λ2
y0 +
µa020λ2
¶2!=(a020)
2
λ2− a
000 − 2a
010x
0 ⇔
λ2
µy0 +
a020λ2
¶2= −2a010
Ãx0 +
a000 −
a020λ2
a010
!Notam⎧⎪⎪⎨⎪⎪⎩
Y = y0 +a020λ2
X = x0 +a000 −
a020λ2
a010
iar forma canonica va fi:
λ2Y2 = −2a010X ⇔ Y 2 = −2a
010
λ2X.
Daca a010 = 0 conica se reduce la doua drepte confundate. Daca a
010 6= 0 conica este o
parabola.Vırful parabolei va fi si originea noului reper. Coordonatele originii ın sistemul rotit vor
fi: y0 = −a020
λ2, x0 = −
a000 −
a020λ2
a010
. In sistemul initial coordonatele originii se obtin aplicınd
rotatia:µx0z0
¶=
µa1 a2b1 b2
¶⎛⎜⎜⎝ −a020λ2
−a000 −
a020λ2
a010
⎞⎟⎟⎠ .
Se deseneaza parabola. Algoritmul se opreste.(Exemplul 8.3)
Observatia 8.5 Conicele nedegenerate sunt elipsa (cercul este un caz particular de elipsa),hiperbola si parabola. Conicele degenerate sunt punctul, doua drepte paralele si doua drepte

8.2. CONICE PE ECUATII GENERALE 105
secante.
8.2.2 Exemple
Exemplul 8.1 Sa se aduca la forma canonica conica5x2 + 8xy + 5y2 − 18x− 18y + 9 = 0si sa se reprezinte grafic.
Rezolvare: Matriceal, ecuatia conicei se scrie¡x y
¢µ 5 44 5
¶µxy
¶− 2
¡9 9
¢µ xy
¶+ 9 = 0
Matricea formei patratice este
µ5 44 5
¶.
Ecuatia caracteristica este λ2 − 10λ+ 9 = 0⇒ λ1 = 1, λ2 = 9.Vectorii proprii se obtin rezolvand sistemele:½4x1 + 4x2 = 04x1 + 4x2 = 0
⇒ −→u1 = −→i −−→j ⇒ −→e1 = 1√2
³−→i −−→j
´½−4x1 + 4x2 = 04x1 − 4x2 = 0
⇒ −→u2 = −→i +−→j ⇒−→e2 = 1√2
³−→i +−→j´.
Matricea de rotatie este:
R =
Ã1√2
1√2
−1√2
1√2
!,detR = 1.
Transformarea coordonatelor este data deµxy
¶=
Ã1√2
1√2
−1√2
1√2
!µx0
y0
¶¡x0 y0
¢Ã 1√2− 1√
21√2
1√2
!µ5 44 5
¶Ã 1√2
1√2
−1√2
1√2
!µx0
y0
¶−
−2¡9 9
¢Ã 1√2
1√2
−1√2
1√2
!µx0
y0
¶+ 9 = 0
(x0)2 + 9(y0)2 − 18y0√2 + 9 = 0⇔ (x0)2 + 9
£(y0)2 − 2y0
√2 + 2
¤− 9 = 0⇔
(x0)2 + 9(y0 −√2)2 − 9 = 0
Conica este o elipsa. Notam½X = x0
Y = y0 −√2
.
Forma canonica este X2 + 9Y 2 − 9 = 0⇔ X2
9+ Y 2 − 1 = 0.
Originea reperului ın care conica are forma canonica esteµxy
¶=
Ã1√2
1√2
−1√2
1√2
!µ0√2
¶=
µ11
¶Trasarea graficului:
-rotatia sistemului de axe: reperul R = (O;−→i ,−→j ) trece ın reperul R0 = (O;−→e1 ,−→e2 ).
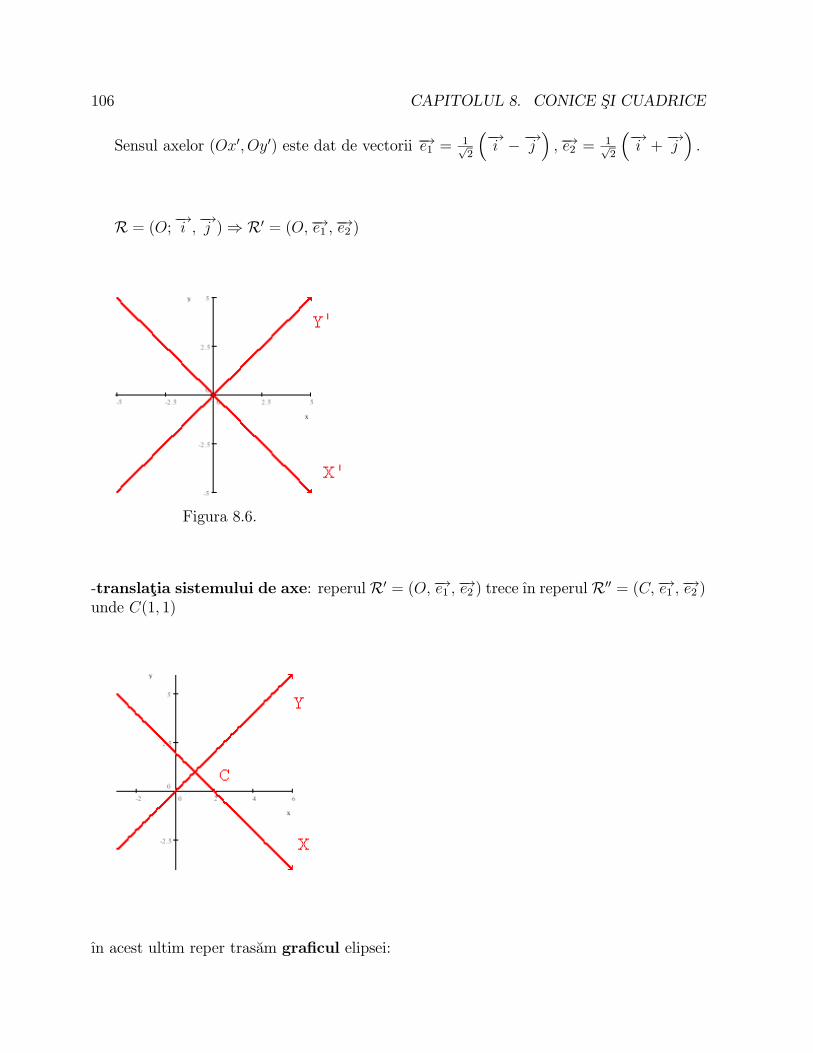
106 CAPITOLUL 8. CONICE SI CUADRICE
Sensul axelor (Ox0, Oy0) este dat de vectorii −→e1 = 1√2
³−→i −−→j
´,−→e2 = 1√
2
³−→i +−→j´.
R = (O;−→i ,−→j )⇒ R0 = (O,−→e1 ,−→e2 )
Figura 8.6.
-translatia sistemului de axe: reperulR0 = (O,−→e1 ,−→e2 ) trece ın reperulR00 = (C,−→e1 ,−→e2 )unde C(1, 1)
ın acest ultim reper trasam graficul elipsei:
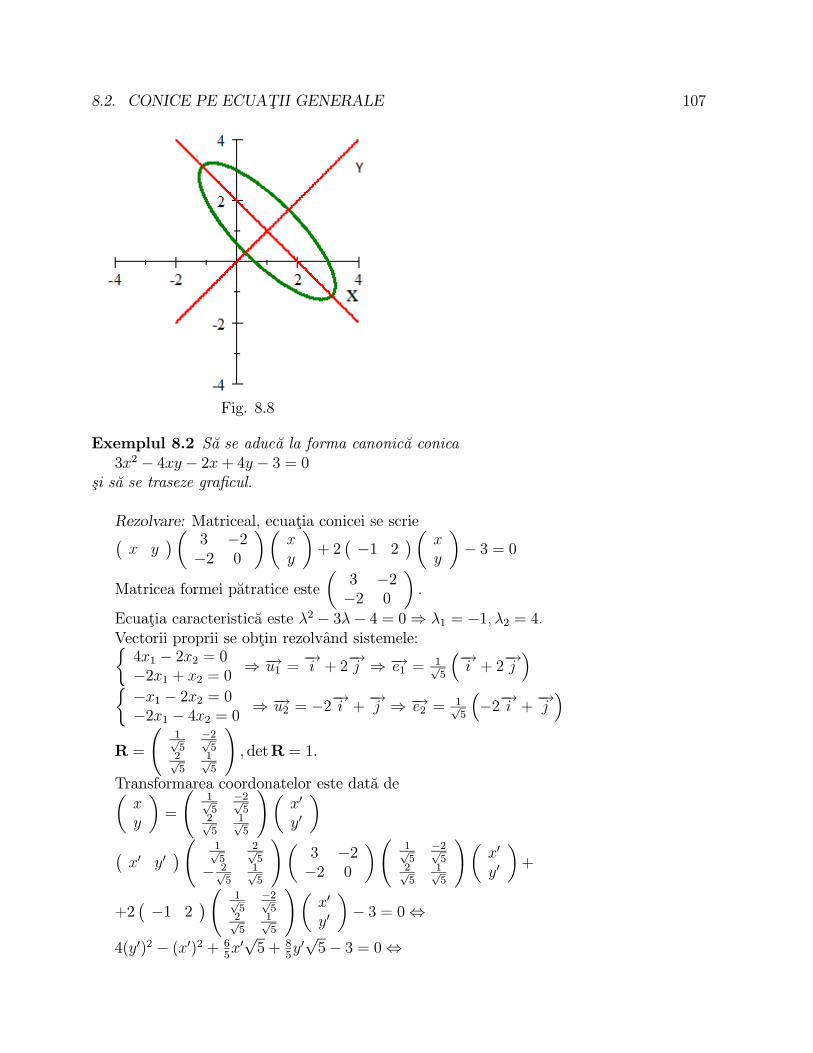
8.2. CONICE PE ECUATII GENERALE 107
Fig. 8.8
Exemplul 8.2 Sa se aduca la forma canonica conica3x2 − 4xy − 2x+ 4y − 3 = 0
si sa se traseze graficul.
Rezolvare: Matriceal, ecuatia conicei se scrie¡x y
¢µ 3 −2−2 0
¶µxy
¶+ 2
¡−1 2
¢µ xy
¶− 3 = 0
Matricea formei patratice este
µ3 −2−2 0
¶.
Ecuatia caracteristica este λ2 − 3λ− 4 = 0⇒ λ1 = −1, λ2 = 4.Vectorii proprii se obtin rezolvand sistemele:½4x1 − 2x2 = 0−2x1 + x2 = 0
⇒ −→u1 = −→i + 2−→j ⇒−→e1 = 1√5
³−→i + 2
−→j´
½−x1 − 2x2 = 0−2x1 − 4x2 = 0
⇒ −→u2 = −2−→i +−→j ⇒−→e2 = 1√5
³−2−→i +−→j
´R =
Ã1√5
−2√5
2√5
1√5
!,detR = 1.
Transformarea coordonatelor este data deµxy
¶=
Ã1√5
−2√5
2√5
1√5
!µx0
y0
¶¡x0 y0
¢Ã 1√5
2√5
− 2√5
1√5
!µ3 −2−2 0
¶Ã 1√5
−2√5
2√5
1√5
!µx0
y0
¶+
+2¡−1 2
¢Ã 1√5
−2√5
2√5
1√5
!µx0
y0
¶− 3 = 0⇔
4(y0)2 − (x0)2 + 65x0√5 + 8
5y0√5− 3 = 0⇔

108 CAPITOLUL 8. CONICE SI CUADRICE
4¡(y0)2 + 2
5y0√5 + 1
5
¢−¡(x0)2 − 6
5x0√5 + 9
5
¢− 2 = 0⇔
4³y0 +
√55
´2−³x0 + 3√
5
´2− 2 = 0.
Conica este o hiperbola. Notam(X = x0 − 3√
5
Y = y0 +√55
.
Forma canonica este 4Y 2 −X2 − 2 = 0⇔ −X2
2+ 2Y 2 − 1 = 0.
Originea reperului ın care conica are forma canonica esteµxy
¶=
Ã1√5
−2√5
2√5
1√5
!Ã3√5
−√55
!=
µ11
¶Trasarea graficului:
-rotatia sistemului de axe: reperulR = (O;−→i ,−→j ) trece ın reperulR0 = (O,−→e1 ,−→e2 ).Sensul axelor (Ox0, Oy0) este dat de vectorii −→e1 = 1√
5
³−→i + 2
−→j´si −→e2 = 1√
5
³−2−→i +−→j
´.
R = (O;−→i ,−→j )⇒ R0 = (O,−→e1 ,−→e2 )
-translatia sistemului de axe: reperul R0 = (O,−→e1 ,−→e2 ) trece ın reperul R00 =(C,−→e1 ,−→e2 ).unde C(1, 1)
ın acest ultim reper trasam graficul:

8.2. CONICE PE ECUATII GENERALE 109
-4 -2 2 4
-4
-2
2
4
x
y
Exemplul 8.3 Sa se aduca la forma canonica si sa se deseneze conica:x2 − 4xy + 4y2 − 6x+ 2y + 1 = 0
Rezolvare: Matriceal, ecuatia conicei se scrie¡x y
¢µ 1 −2−2 4
¶µxy
¶+ 2
¡−3 1
¢µ xy
¶+ 1 = 0
Matricea formei patratice este
µ1 −2−2 4
¶.
Ecuatia caracteristica este λ2 − 5λ = 0⇒ λ1 = 0, λ2 = 5.Vectorii proprii se obtin rezolvand sistemele: pentru λ1 = 0½
x1 − 2x2 = 0−2x1 + 4x2 = 0
⇒ −→u1 = 2−→i +−→j ⇒ −→e1 = 1√5
³2−→i +−→j´
pentru λ2 = 5½−4x1 − 2x2 = 0−2x1 − 1x2 = 0
⇒ −→u2 = −→i − 2−→j ⇒−→e2 = 1√5
³−→i − 2−→j
´R =
Ã2√5
1√5
1√5
−2√5
!,detR = −1
Pentru ca detR = 1 schimbam sensul vectorului −→e2 ,−→e2 = 1√5
³−−→i + 2−→j
´, deci ma-
tricea de rotatie va fi
R =
Ã2√5
−1√5
1√5
2√5
!.
Transformarea coordonatelor este data deµxy
¶=
Ã2√5
−1√5
1√5
2√5
!µx0
y0
¶¡x0 y0
¢Ã 2√5
1√5
− 1√5
2√5
!µ1 −2−2 4
¶Ã 2√5
−1√5
1√5
2√5
!µx0
y0
¶+
+2¡−3 1
¢Ã 2√5
−1√5
1√5
2√5
!µx0
y0
¶+ 1 = 0⇔
5(y0)2 − 2x0√5 + 2y0
√5 + 1 = 0⇔ 5
³(y0)2 + 2√
5y0 + 1
5
´− 2x0
√5 = 0⇔
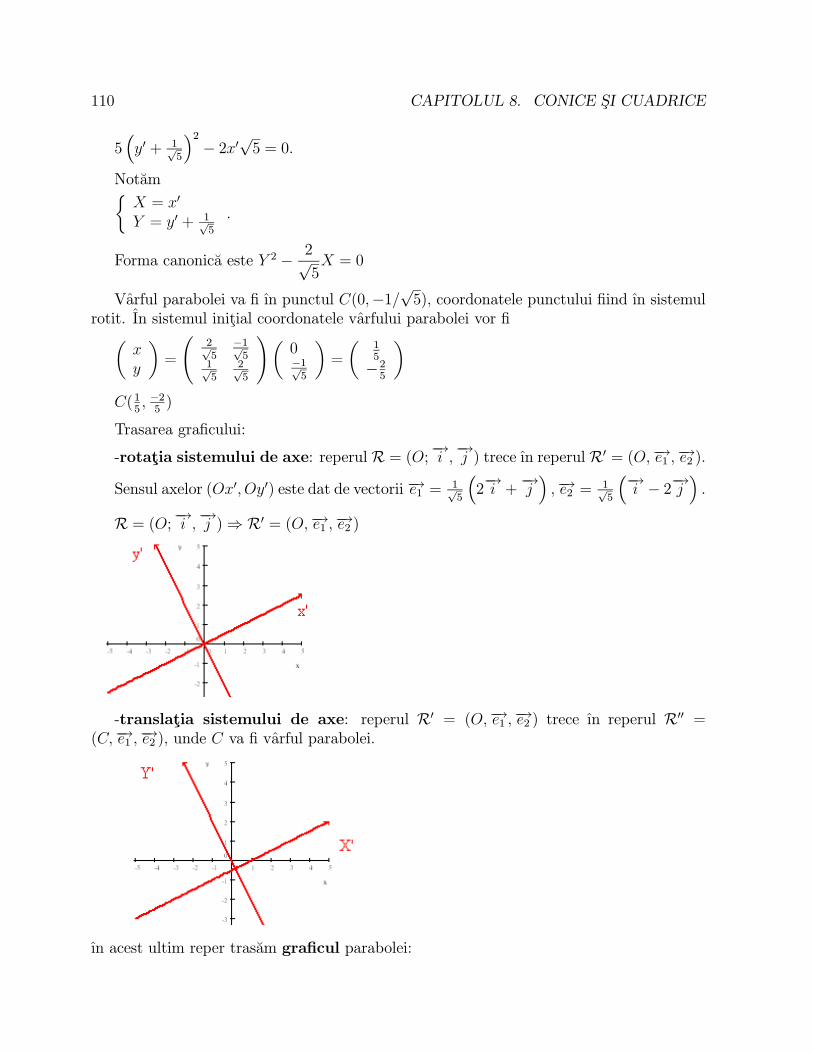
110 CAPITOLUL 8. CONICE SI CUADRICE
5³y0 + 1√
5
´2− 2x0
√5 = 0.
Notam½X = x0
Y = y0 + 1√5
.
Forma canonica este Y 2 − 2√5X = 0
Varful parabolei va fi ın punctul C(0,−1/√5), coordonatele punctului fiind ın sistemul
rotit. In sistemul initial coordonatele varfului parabolei vor fiµxy
¶=
Ã2√5
−1√5
1√5
2√5
!µ0−1√5
¶=
µ15
−25
¶C(1
5, −25)
Trasarea graficului:
-rotatia sistemului de axe: reperulR = (O;−→i ,−→j ) trece ın reperulR0 = (O,−→e1 ,−→e2 ).
Sensul axelor (Ox0, Oy0) este dat de vectorii−→e1 = 1√5
³2−→i +−→j´,−→e2 = 1√
5
³−→i − 2−→j
´.
R = (O;−→i ,−→j )⇒ R0 = (O,−→e1 ,−→e2 )
-translatia sistemului de axe: reperul R0 = (O,−→e1 ,−→e2 ) trece ın reperul R00 =(C,−→e1 ,−→e2 ), unde C va fi varful parabolei.
ın acest ultim reper trasam graficul parabolei:

8.2. CONICE PE ECUATII GENERALE 111
-4 -2 2 4
-4
-2
2
4
x
y
Exemplul 8.4 Sa se aduca la forma canonica si sa se deseneze conica:x2 + 2xy + y2 + 2x+ 2y − 3 = 0
Rezolvare: Matriceal, ecuatia conicei se scrie¡x y
¢µ 1 11 1
¶µxy
¶+ 2
¡1 1
¢µ xy
¶− 3 = 0
Matricea formei patratice este
µ1 11 1
¶. Ecuatia caracteristica este λ2 − 2λ = 0 ⇒
λ1 = 0, λ2 = 2.Vectorii proprii se obtin rezolvand sistemele: pentru λ1 = 0½
x1 + x2 = 0x1 + x2 = 0
⇒−→u1 = −→i −−→j ⇒ −→e1 = 1√2
³−→i −−→j
´pentru λ2 = 5½
−x1 + x2 = 0x1 − x2 = 0
⇒−→u2 = −→i +−→j ⇒−→e2 = 1√2
³−→i +−→j´
R =
Ã1√2
1√2
− 1√2
1√2
!,detR = 1
Transformarea coordonatelor este data deµxy
¶=
Ã1√2
1√2
− 1√2
1√2
!µx0
y0
¶¡x0 y0
¢Ã 1√2− 1√
21√2
1√2
!µ1 11 1
¶Ã 1√2
1√2
− 1√2
1√2
!µx0
y0
¶+
+2¡1 1
¢Ã 1√2
1√2
− 1√2
1√2
!µx0
y0
¶− 3 = 0,
2y02 + 2y0√2− 3 = 0⇔ 2y02 + 2y0
√2 + 1− 4 = 0⇔¡
y0√2 + 1
¢2 − 4 = 0 ⇔¡y0√2− 1
¢ ¡y0√2 + 3
¢= 0 ⇒conica reprezinta doua drepte
paraleleµx0
y0
¶=
Ã1√2− 1√
21√2
1√2
!µxy
¶=
µ12x√2− 1
2y√2
12x√2 + 1
2y√2
¶y0√2− 1 = 0⇒ (1
2x√2 + 1
2y√2)√2− 2 = 0⇒ x+ y − 1

112 CAPITOLUL 8. CONICE SI CUADRICE
y0√2 + 3 = 0⇒ (1
2x√2 + 1
2y√2)√2 + 3 = 0⇒ x+ y + 3 = 0
x = −3− y, x = 1− y
-4 -2 2 4
-8
-6
-4
-2
2
4
6
x
y
8.3 CUADRICE PE ECUATII REDUSE
Numim cuadrice nedegenerate suprafetele: sfera, elipsoidul, hiperboloidul cu o panza,hiperboloidul cu doua panze, paraboloidul eliptic si paraboloidul hiperbolic. Deoarece eleadmit ıntr-un reper ortonormat reprezentari analitice pe ecuatii algebrice de gradul doi, elesunt suprafete algebrice de ordinul al doilea.
8.3.1 Sfera
Fie reperul R =(O;−→i ,−→j ,−→k ) si punctele Mi(xi, yi, zi), i = 1, 2, 3. Reamintim formuladistantei dintre doua puncte:dist(M1,M2) =
p(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2.
Definitia 8.6 Locul geometric al punctelor din spatiuM(x, y, z) cu proprietatea ca distantalor la un punct fix M0(x0, y0, z0) este constanta se numeste sfera (suprafata sferica).Daca r respectiv r0 sunt vectorii de pozitie ai punctelor M si M0, atunci
kr − r0k = R. (8.18)
M0(x0, y0, z0) se numeste centrul sferei, iar r este raza sferei.
Teorema 8.3 Punctul M(x, y, z) apartine sferei de centru C(x0, y0, z0) si raza R daca sinumai daca
(x− x0)2 + (y − y0)
2 + (z − z0)2 = R2. (8.19)
Demonstratie. M ∈sferei⇔ kM0Mk = R⇔ kr − r0k = R⇔p(x− x0)2 + (y − y0)2 + (z − z0)2 = R⇔ (x− x0)
2 + (y − y0)2 + (z − z0)
2 = R2.¨

8.3. CUADRICE PE ECUATII REDUSE 113
Figura 8.6
Observatia 8.6 Ecuatia (8.18) se numeste ecuatia vectoriala a sferei. Ecuatia (8.19)se numeste ecuatia carteziana implicita a sferei.
Ecuatia sferei este un polinom de grad doi ın x, y, z, termenul de grad doi fiind x2+y2+z2.Aceasta ne sugereaza sa cercetam ecuatia
x2 + y2 + z2 + 2ax+ 2by + 2cz + d = 0si sa stabilim ın ce caz ea reprezinta ecuatia unei sfere. Aceasta ecuatie se mai poate scriede forma(x+ a)2 + (y + b)2 + (z + c)2 = a2 + b2 + c2 − d.De aici observam ca dacaa) a2 + b2 + c2 − d > 0 ecuatia reprezinta o sfera de centru (−a,−b,−c) si raza R =√
a2 + b2 + c2 − d.b) a2 + b2 + c2 − d = 0 ecuatia reprezinta un punct de coordonate (−a,−b,−c);c) a2 + b2 + c2 − d < 0 ecuatia reprezinta o sfera imaginara.Ecuatia x2+y2+z2+2ax+2by+2cz+d = 0 cu a2+ b2+ c2−d > 0 reprezinta ecuatia
carteziana generala a sferei.Ecuatia sferei cu centru ın origine si de raza R estex2 + y2 + z2 = R2.
Observatia 8.7 Sfera este o multime marginita si ınchisa, deci compacta. Punctele de pesuprafata sferica sun ın interiorul unui patrat deoarece din ecuatia (x− x0)
2 + (y − y0)2 +
(z − z0)2 = R2 rezulta ca (x− x0)
2 ≤ R2 ⇒ x0 −R ≤ x ≤ x0 +R. Analog si pentru y si z.
Ecuatiile parametrice ale sferei cu centrul ın M0(x0, y0, z0):⎧⎨⎩ x = x0 +R cosϕ sinψy = y0 +R sinϕ sinψz = z0 +R cosψ
, ϕ ∈ [0, 2π) , ψ ∈h−π2,π
2
i.
8.3.2 Elipsoidul
Definitia 8.7 Locul geometric al punctelor M(x, y, z) din spatiu care satisfac ecuatiax2
a2+
y2
b2+
z2
c2= 1, a, b, c ∈ R+, (8.20)
se numeste elipsoid.
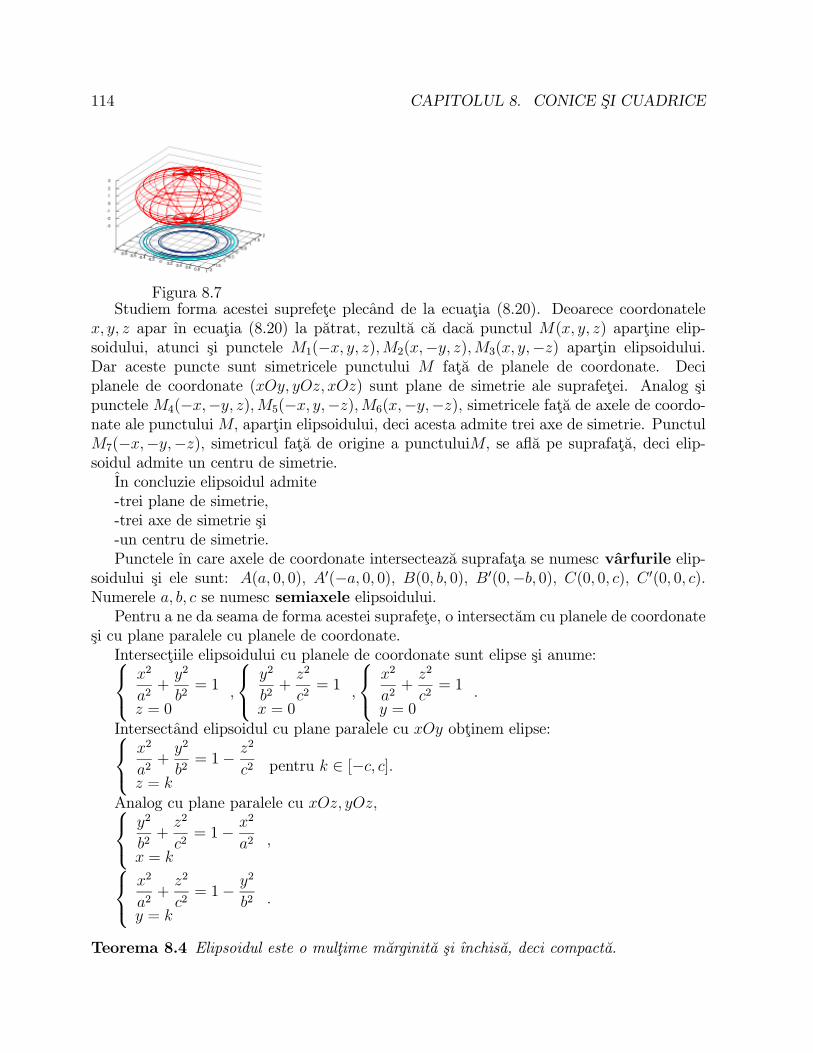
114 CAPITOLUL 8. CONICE SI CUADRICE
Figura 8.7Studiem forma acestei suprefete plecand de la ecuatia (8.20). Deoarece coordonatele
x, y, z apar ın ecuatia (8.20) la patrat, rezulta ca daca punctul M(x, y, z) apartine elip-soidului, atunci si punctele M1(−x, y, z),M2(x,−y, z),M3(x, y,−z) apartin elipsoidului.Dar aceste puncte sunt simetricele punctului M fata de planele de coordonate. Deciplanele de coordonate (xOy, yOz, xOz) sunt plane de simetrie ale suprafetei. Analog sipunctele M4(−x,−y, z),M5(−x, y,−z),M6(x,−y,−z), simetricele fata de axele de coordo-nate ale punctuluiM, apartin elipsoidului, deci acesta admite trei axe de simetrie. PunctulM7(−x,−y,−z), simetricul fata de origine a punctuluiM, se afla pe suprafata, deci elip-soidul admite un centru de simetrie.In concluzie elipsoidul admite-trei plane de simetrie,-trei axe de simetrie si-un centru de simetrie.Punctele ın care axele de coordonate intersecteaza suprafata se numesc varfurile elip-
soidului si ele sunt: A(a, 0, 0), A0(−a, 0, 0), B(0, b, 0), B0(0,−b, 0), C(0, 0, c), C 0(0, 0, c).Numerele a, b, c se numesc semiaxele elipsoidului.Pentru a ne da seama de forma acestei suprafete, o intersectam cu planele de coordonate
si cu plane paralele cu planele de coordonate.Intersectiile elipsoidului cu planele de coordonate sunt elipse si anume:⎧⎨⎩ x2
a2+
y2
b2= 1
z = 0,
⎧⎨⎩ y2
b2+
z2
c2= 1
x = 0,
⎧⎨⎩ x2
a2+
z2
c2= 1
y = 0.
Intersectand elipsoidul cu plane paralele cu xOy obtinem elipse:⎧⎨⎩ x2
a2+
y2
b2= 1− z2
c2z = k
pentru k ∈ [−c, c].
Analog cu plane paralele cu xOz, yOz,⎧⎨⎩ y2
b2+
z2
c2= 1− x2
a2x = k
,⎧⎨⎩ x2
a2+
z2
c2= 1− y2
b2y = k
.
Teorema 8.4 Elipsoidul este o multime marginita si ınchisa, deci compacta.

8.3. CUADRICE PE ECUATII REDUSE 115
Demonstratie. Din ecuatia elipsoidului rezultax2
a2≤ 1, y
2
b2≤ 1, z
2
c2≤ 1⇔ −a ≤ x ≤ a,−b ≤ y ≤ b,−c ≤ z ≤ c⇒
toate punctele elipsoidului sunt cuprinse ın interiorul unui paralelipiped cu laturi de lungimifinite.¨Ecuatia planului tangent la elipsoid printr-un punct al elipsoidului se obtine
prin dedublare. Fie M0(x0, y0, z0) un punct de pe elipsoidul de ecuatie (8.20). Ecuatiaplanului tangent prin acest punct este
xx0a2
+yy0b2+
zz0c2= 1
O reprezentare parametrica a elipsoidului se obtine de forma:⎧⎨⎩ x = a cosϕ sinψy = b sinϕ sinψz = c cosψ
,ϕ ∈ [0, 2π) , ψ ∈h−π2,π
2
i.
Suprafata reprezentata prin ecuatia:x2
a2+
y2
b2+
z2
c2+ 1 = 0, a, b, c > 0
se numeste elipsoid imaginar.
8.3.3 Hiperboloidul cu o panza
Definitia 8.8 Locul geometric al punctelor M(x, y, z) din spatiu care satisfac ecuatia
x2
a2+
y2
b2− z2
c2− 1 = 0, a, b, c ∈ R+, (8.21)
se numeste hiperboloid cu o panza. Numerele a, b, c se numesc semiaxele hiper-boloidului.
Observatia 8.8 Tot hiperboloizi cu o panza reprezinta ecuatiile:x2
a2− y2
b2+
z2
c2− 1 = 0,
−x2
a2+
y2
b2+
z2
c2− 1 = 0.
Figura 8.8

116 CAPITOLUL 8. CONICE SI CUADRICE
Hiperboloidul cu o panza are aceleasi simetrii ca si elipsoidul. Are patru varfuri,A(a, 0, 0), A0(−a, 0, 0), B(0, b, 0), B0(0,−b, 0). Intersectiile cu planele x = 0 si y = 0 sunt
hiperbole,
⎧⎨⎩ y2
b2− z2
c2= 1
x = 0respectiv
⎧⎨⎩ x2
a2− z2
c2= 1
y = 0iar cu planul z = 0 intersectia este
o elipsa
⎧⎨⎩ x2
a2+
y2
b2= 1
z = 0.
Intersectiile cu plane paralele cu xOy, z = k, sunt elipse reale, oricare ar fi k ∈ R:⎧⎨⎩ x2
a2+
y2
b2= 1 +
z2
c2z = k
.
Intersectiile cu plane paralele cu planele xOz si respectiv yOz sunt hiperbole,⎧⎨⎩ x2
a2− z2
c2= 1− k2
b2y = k
,
⎧⎨⎩ y2
b2− z2
c2= 1− k2
a2x = k
.
Rezulta ca hiperboloidul cu o panza este o suprafata nemarginita .
Daca a = b elipsele de intersectie ale suprafetei cu plane paralele cu planul xOy suntcercuri.
Cuadricax2
a2+y2
b2− z2
c2= 0 se numeste conul asimptotic al hiperboloidului cu o panza.
Figura 8.9
Ecuatia planului tangent la hiperboloidul cu o panza printr-un punct al sause obtine prin dedublare. Fie M0(x0, y0, z0) un punct de pe hiperboloidului cu o panza deecuatie (8.21). Ecuatia planului tangent prin acest punct este
xx0a2
+yy0b2− zz0
c2= 1.
O reprezentare parametrica a hiperboloidului cu o panza este:

8.3. CUADRICE PE ECUATII REDUSE 117⎧⎪⎪⎪⎨⎪⎪⎪⎩x = a
cosϕ
cosψ
y = bsinϕ
cosψz = c tgψ
,ϕ ∈ [0, 2π) , ψ ∈³−π2,π
2
´.
O a doua reprezentare parametrica a hiperboloidului cu o panza se obtine, tinınd seamaca 1 + sh2 ψ = ch2 ψ, luand z = c shψ. Avem:⎧⎨⎩ x = a cosϕ chψ
y = b sinϕ chψz = c shψ
,ϕ ∈ [0, 2π) , ψ ∈ R.
8.3.4 Hiperboloidul cu doua panze
Definitia 8.9 Locul geometric al punctelor M(x, y, z) din spatiu care satisfac ecuatia
−x2
a2− y2
b2+
z2
c2− 1 = 0, a, b, c ∈ R+ (8.22)
se numeste hiperboloid cu doua panze. Numerele a, b, c se numesc semiaxele hiper-boloidului.
Observatia 8.9 Tot hiperboloizii cu o panza reprezinta ecuatiile:x2
a2+
y2
b2− z2
c2− 1 = 0,−x
2
a2− y2
b2+
z2
c2− 1 = 0, x
2
a2− y2
b2− z2
c2− 1 = 0,
-x2
a2+
y2
b2+
z2
c2+ 1 = 0,−x
2
a2+
y2
b2− z2
c2− 1 = 0, x
2
a2+
y2
b2− z2
c2+ 1 = 0,
x2
a2− y2
b2+
z2
c2+ 1 = 0,−x
2
a2+
y2
b2+
z2
c2+ 1 = 0.
Figura 8.10Hiperboloidul cu doua panze are aceleasi simetrii ca si elipsoidul. Are doua varfuri
C(0, 0, c), C 0(0, 0, c). Intersectiile cu planele x = 0 si y = 0 sunt hiperbole⎧⎨⎩ x2
a2− y2
b2= 1
z = 0,
⎧⎨⎩ x2
a2− z2
c2= 1
y = 0.

118 CAPITOLUL 8. CONICE SI CUADRICE
Intersectiile cu plane paralele cu yOz, x = k, sunt elipse:⎧⎨⎩ z2
c2+
y2
b2=
z2
a2− 1
x = k, k ∈ (−∞, a]∪[a,∞).
Intersectiile cu plane paralele cu planele xOy si xOz sunt hiperbole⎧⎨⎩ x2
a2− y2
b2= 1 +
k2
c2z = k
,
⎧⎨⎩ x2
a2− z2
c2= 1 +
k2
b2y = k
.
Hiperboloidul cu doua panze este o multime nemarginita.
Cuadricax2
a2− y2
b2− z2
c2= 0 se numeste conul asimptotic al hiperboloidului cu doua
panze.Ecuatia planului tangent la hiperboloidul cu doua panze printr-un punct al
sau se obtine prin dedublare. Fie M0(x0, y0, z0) un punct de pe hiperboloidului cu douapanze de ecuatie (8.22). Ecuatia planului tangent prin acest punct este
xx0a2− yy0
b2− zz0
c2= 1.
O reprezentare parametrica a hiperboloidului cu doua panze este:⎧⎨⎩ x = a cosϕ shψy = b sinϕ shψz = chψ
,ϕ ∈ [0, 2π) , ψ ∈ R+.
8.3.5 Paraboloidul eliptic
Definitia 8.10 Locul geometric al punctelor M(x, y, z) din spatiu care satisfac ecuatia
x2
a2+
y2
b2= 2z, a, b > 0 (8.23)
se numeste paraboloid eliptic.
Observatia 8.10 Tot paraboloizi eliptici reprezinta ecuatiile:y2
b2+
z2
c2= 2x,
x2
a2+
z2
c2= 2y.
Figura 8.11Planele de coordonate yOz si xOz sunt plane de simetrie, iar axa Oz este axa de simetrie
a suprafetei. Paraboloidul eliptic nu are centru de simetrie.

8.3. CUADRICE PE ECUATII REDUSE 119
Din relatia (8.23) rezulta ca z ≥ 0, deci paraboloidul eliptic esta situat deasupra planuluixOy.
Intersectiile cu planele z = k, k ≥ 0, sunt curbele⎧⎨⎩ x2
a2+
y2
b2= 2z
z = k
care reprezinta pentru k > 0 elipse reale ale caror semiaxe cresc odata cu k. Pentru k = 0obtinem x = y = z = 0, adica originea reperului. Punctul O este singurul varf al suprafetei.Intersectiile cu celelalte plane de coordonate sunt parabole.
Intersectiile cu plane paralele cu xOz si yOz sunt parabole⎧⎨⎩ x2
a2= 2z − k2
b2y = k
,
⎧⎨⎩ y2
b2= 2z − x2
a2x = k
Ecuatia planului tangent la paraboloidul eliptic printr-un punct al sau se obtineprin dedublare. Fie M0(x0, y0, z0) un punct de pe paraboloidului eliptic de ecuatie (8.23).Ecuatia planului tangent prin acest punct este
xx0a2
+yy0b2= z + z0.
O reprezentare parametrica a paraboloidului eliptic se obtine luand 2z = v2 :⎧⎪⎨⎪⎩x = aψ cosϕy = bψ sinϕ
z =1
2ψ2
, (u, v) ∈ [0, 2π)× [0,∞) .
8.3.6 Paraboloidul hiperbolic
Definitia 8.11 Locul geometric al punctelor M(x, y, z) din spatiu care satisfac ecuatia
x2
a2− y2
b2= 2z, a, b > 0 (8.24)
se numeste paraboloid hiperbolic.
Observatia 8.11 Tot paraboloizi hiperbolici reprezinta ecuatiile:
y2
b2− z2
c2= 2x,
x2
a2− z2
c2= 2y.
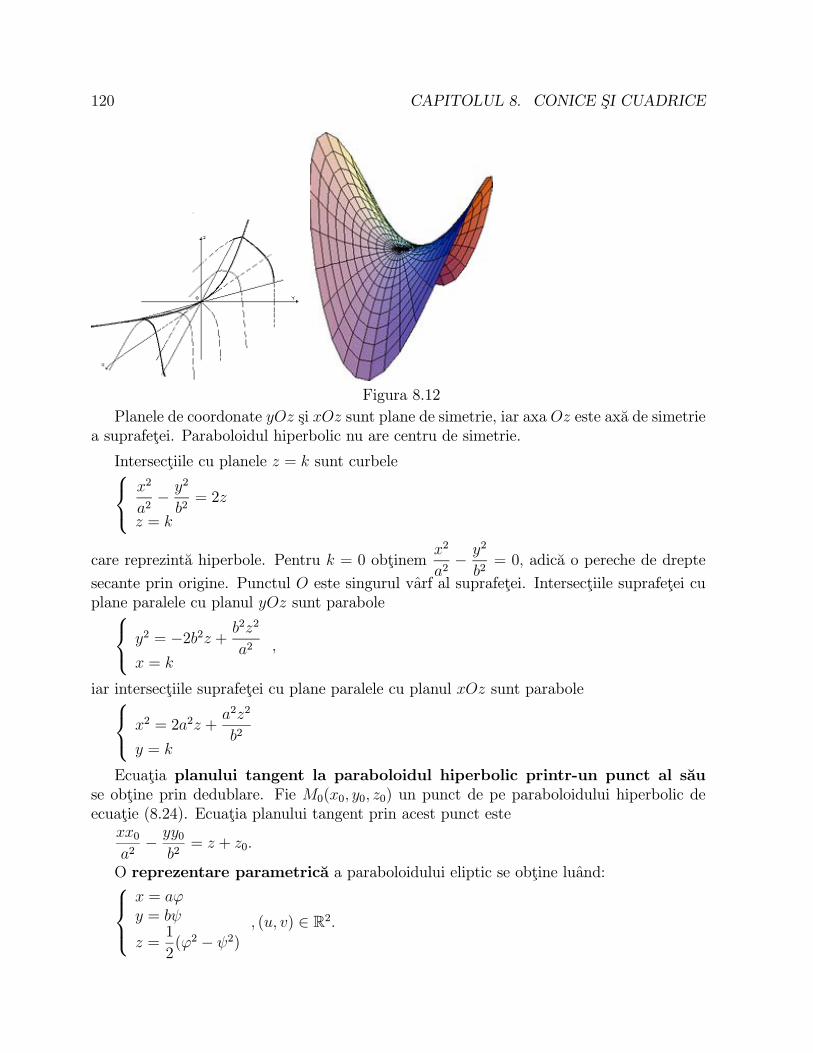
120 CAPITOLUL 8. CONICE SI CUADRICE
Figura 8.12
Planele de coordonate yOz si xOz sunt plane de simetrie, iar axa Oz este axa de simetriea suprafetei. Paraboloidul hiperbolic nu are centru de simetrie.
Intersectiile cu planele z = k sunt curbele⎧⎨⎩ x2
a2− y2
b2= 2z
z = k
care reprezinta hiperbole. Pentru k = 0 obtinemx2
a2− y2
b2= 0, adica o pereche de drepte
secante prin origine. Punctul O este singurul varf al suprafetei. Intersectiile suprafetei cuplane paralele cu planul yOz sunt parabole⎧⎨⎩ y2 = −2b2z + b2z2
a2x = k
,
iar intersectiile suprafetei cu plane paralele cu planul xOz sunt parabole⎧⎨⎩ x2 = 2a2z +a2z2
b2y = k
Ecuatia planului tangent la paraboloidul hiperbolic printr-un punct al sause obtine prin dedublare. Fie M0(x0, y0, z0) un punct de pe paraboloidului hiperbolic deecuatie (8.24). Ecuatia planului tangent prin acest punct este
xx0a2− yy0
b2= z + z0.
O reprezentare parametrica a paraboloidului eliptic se obtine luand:⎧⎪⎨⎪⎩x = aϕy = bψ
z =1
2(ϕ2 − ψ2)
, (u, v) ∈ R2.
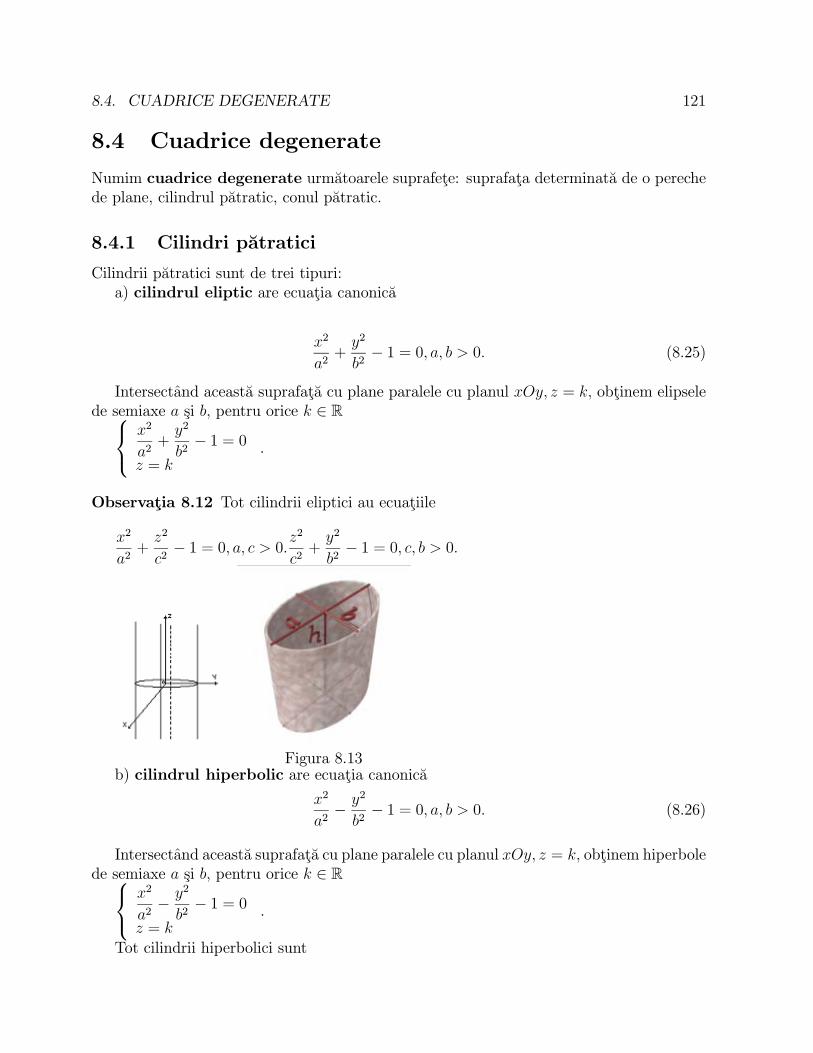
8.4. CUADRICE DEGENERATE 121
8.4 Cuadrice degenerate
Numim cuadrice degenerate urmatoarele suprafete: suprafata determinata de o perechede plane, cilindrul patratic, conul patratic.
8.4.1 Cilindri patratici
Cilindrii patratici sunt de trei tipuri:a) cilindrul eliptic are ecuatia canonica
x2
a2+
y2
b2− 1 = 0, a, b > 0. (8.25)
Intersectand aceasta suprafata cu plane paralele cu planul xOy, z = k, obtinem elipselede semiaxe a si b, pentru orice k ∈ R⎧⎨⎩ x2
a2+
y2
b2− 1 = 0
z = k.
Observatia 8.12 Tot cilindrii eliptici au ecuatiile
x2
a2+
z2
c2− 1 = 0, a, c > 0.z
2
c2+
y2
b2− 1 = 0, c, b > 0.
Figura 8.13b) cilindrul hiperbolic are ecuatia canonica
x2
a2− y2
b2− 1 = 0, a, b > 0. (8.26)
Intersectand aceasta suprafata cu plane paralele cu planul xOy, z = k, obtinem hiperbolede semiaxe a si b, pentru orice k ∈ R⎧⎨⎩ x2
a2− y2
b2− 1 = 0
z = k.
Tot cilindrii hiperbolici sunt

122 CAPITOLUL 8. CONICE SI CUADRICE
x2
a2− z2
c2− 1 = 0, a, c > 0; z
2
c2− y2
b2− 1 = 0, c, b > 0.
c) cilindrul parabolic are ecuatia canonica
x2 = 2py. (8.27)
Intersectand aceasta suprafata cu plane paralele cu planul xOy, z = k, obtinem parabolele,pentru orice k ∈ R½
x2 = 2pyz = k
.
Tot cilindrii parabolici suntz2 = 2py, x2 = 2pz, y2 = 2px, y2 = 2pz, z2 = 2px.
8.4.2 Conul patratic
Conul patratic este suprafata de ecuatie
x2
a2+
y2
b2− z2
c2= 0, a, b, c ∈ R+. (8.28)
Intersectand aceasta suprafata cu plane paralele cu planul xOy, z = k, obtinem elipselepentru orice k ∈ R⎧⎨⎩ x2
a2+
y2
b2− k2
c2= 0
z = k.
Observatia 8.13 Tot conuri patratice reprezinta ecuatiilex2
a2− y2
b2+
z2
c2= 0, a, c > 0.− x2
a2+
z2
c2+
y2
b2= 0, a, b, c > 0.
Figura 8.14







