system for self-exploration of virtual and real environments through vectorial acoustic spaces
TRANSCRIPT
1
DESCRIPCIÓN Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos
vectoriales. La presente invención se refiere a un sistema que permite a personas invidentes explorar 5
entornos tridimensionales, mediante la síntesis de audio binaural en tiempo real de un conjunto de fuentes sonoras puntuales en campo libre (vértices acústicos) que aproximan la geometría del entorno tridimensional, siendo de aplicación en el campo de las ayudas para invidentes y en la mejora de la accesibilidad a computadores y espacios reales. El sistema se diferencia de los existentes hasta la fecha en que: 1) la información geométrica no es adquirida 10 por sistemas de visión artificial, sino que ésta se encuentra almacenada en la memoria física de un computador, 2) la descripción de la geometría es vectorial, resolviendo la falta de resolución espacial de sistemas basados en visión y 3) se incorpora un patrón inteligente de activación de las fuentes puntuales, dependiente de la propia geometría, que permite una percepción más eficiente y precisa del espacio acústico. 15 Antecedentes de la invención
El reto de proporcionar referencias espaciales a las personas invidentes se persigue desde hace mucho tiempo. Se ha facilitado información espacial a los invidentes a través del sentido del oído de muy diversas formas y, en concreto, existen varios grupos en el mundo que han 20 trabajado en la traducción de información espacial a través de las funciones de transferencia de la cabeza, comúnmente denominadas HRTF (del inglés head related transfer functions) o de sus equivalentes temporales, las respuestas al impulso de la cabeza, llamadas HRIR (del inglés head related impulse responses).
Las HRIR de un determinado sujeto describen cómo un sonido que procede de una cierta 25 dirección (θ,Φ) y desde una cierta distancia r se ve modificado por el efecto de la difracción y la reflexión del sonido en la cabeza, en el torso y en las orejas del propio sujeto. Los seres humanos aprendemos a utilizar la información contenida en dichas respuestas al impulso para localizar fuentes sonoras en el espacio. De este modo percibimos, por ejemplo, por dónde viene un coche que se aproxima, o que algo acaba de caer justo a nuestras espaldas. 30
Se sabe que esta habilidad para localizar sonidos funciona mejor en entornos con características de campo libre (esto es, entornos en los que apenas existe reflexión del sonido) y para fuentes sonoras de banda ancha y carácter impulsivo.
Es posible crear una “fuente sonora virtual” en campo libre de forma sencilla. A través de la convolución del patrón sonoro de la fuente sonora con las HRIR de un determinado sujeto 35 para una determinada posición (r,θ,Φ), es posible generar tramas de audio que, reproducidas por unos auriculares comunes, den al sujeto la sensación de que la fuente sonora se encuentra en las coordenadas esféricas (r,θ,Φ). Esta sensación espacial se ve reforzada si el procesado es actualizado en tiempo real y se permite que el sujeto se mueva en relación a la fuente virtual. Esto es debido a que los seres humanos utilizamos el movimiento de forma natural para 40 discriminar confusiones en la localización de fuentes sonoras. La síntesis binaural en campo libre es hoy día posible gracias al avance de las técnicas actuales correspondientes al estado del arte del procesado digital de la señal.
Es preciso subrayar el hecho de que la localización de fuentes sonoras es una habilidad que el ser humano adquiere a través del entrenamiento. El cerebro no tiene información previa 45
2
acerca de la forma de las orejas en el momento del nacimiento, y por tanto el recién nacido no tiene la capacidad de discernir la procedencia de los sonidos durante los primeros meses de vida. En cuanto aparecen los primeros signos de coordinación muscular, los bebés humanos aprenden a relacionar el patrón espectral de los sonidos que perciben con una cierta dirección y distancia. De este modo la habilidad para localizar sonidos comienza a desarrollarse. Este 5 proceso de entrenamiento no se restringe a la infancia, aunque la capacidad de aprendizaje de los recién nacidos en este sentido es muy superior a la de los adultos. Los seres humanos siguen entrenando y adaptando la habilidad de localización a lo largo de su vida, ya que su torso, su cabeza y sus orejas cambian con la edad. Se han documentado casos en los que personas con orejas parcial o totalmente seccionadas han recuperado, tras cierto tiempo, la 10 habilidad para localizar sonidos, lo que demuestra que es posible reeducar al cerebro para que adopte unas nuevas HRIR si se le facilitan los estímulos adecuados.
Todos estos hechos y las pruebas realizadas en los trabajos de investigación precedentes a esta invención llevan a la conclusión de que los seres humanos, y especialmente las personas invidentes, siendo más sensibles a los estímulos auditivos, pueden refinar su habilidad para 15 localizar sonidos mediante un adecuado entrenamiento. Pero la búsqueda de alternativas a la percepción visual, que supongan una verdadera mejora de la movilidad de los invidentes y su percepción del entorno, es categóricamente distinta en función de si el entorno es, o no, conocido previamente.
Si no existe información previa sobre el entorno, la adquisición de la información se 20 realiza, habitualmente, mediante algún tipo de sistema de visión artificial. Tal es el caso de la patente española P9602283 (INSTITUTO DE ASTROFÍSICA DE CANARIAS ‐ UNIVERSIDAD DE LA LAGUNA), en la que se describe la creación de un espacio acústico virtual mediante HRTF en que los objetos virtuales se representan recubriéndolos con una malla regular de pequeños generadores acústicos que definirían sus cualidades físicas, posición, color, textura, etc. 25
No obstante, en dicho sistema, las restricciones de las técnicas actuales de percepción tridimensional mediante visión artificial necesarias para obtener la información geométrica, derivan en una definición “raster” del espacio acústico virtual, es decir, basada en una malla regular, en contraposición a una representación vectorial. Esto limita enormemente la capacidad de representación del sistema, impide una descripción inteligente y precisa de dicho 30 espacio, que es percibido por el invidente como un conjunto desordenados de puntos, y no permite la introducción de patrones complejos de activación de las fuentes puntuales. Descripción de la invención
La presente invención se basa en la generalización del concepto de espacio acústico virtual 35 mediante una descripción vectorial del mismo. Se define así un espacio acústico vectorial cuya unidad mínima de información es la fuente sonora puntual en campo libre, que denominaremos en adelante vértice acústico. Partiendo de mapas vectoriales de entornos conocidos es posible disponer vértices acústicos en puntos estratégicos del espacio acústico virtual, sin restricción espacial alguna, y activarlos de acuerdo a un patrón inteligente que 40 mejore la percepción final de la geometría del entorno virtual.
El sistema al que se refiere la presente invención se organiza en una estructura cliente servidor que optimiza el procesamiento de la información y que posibilita su aplicación en el ámbito de la mejora de la accesibilidad de los ordenadores (por ejemplo el diseño de juegos de ordenador para invidentes) y en edificios o entornos reales de los que exista una descripción 45

3
geométrica adecuada. La implementación práctica de un sistema de navegación de entornos virtuales o reales sin el uso de la vista es perfectamente viable a día de hoy, ya que no se trata tanto de reproduccir exactamente la realidad visual si no de crear un espacio acústico que permita a los invidentes guiarse.
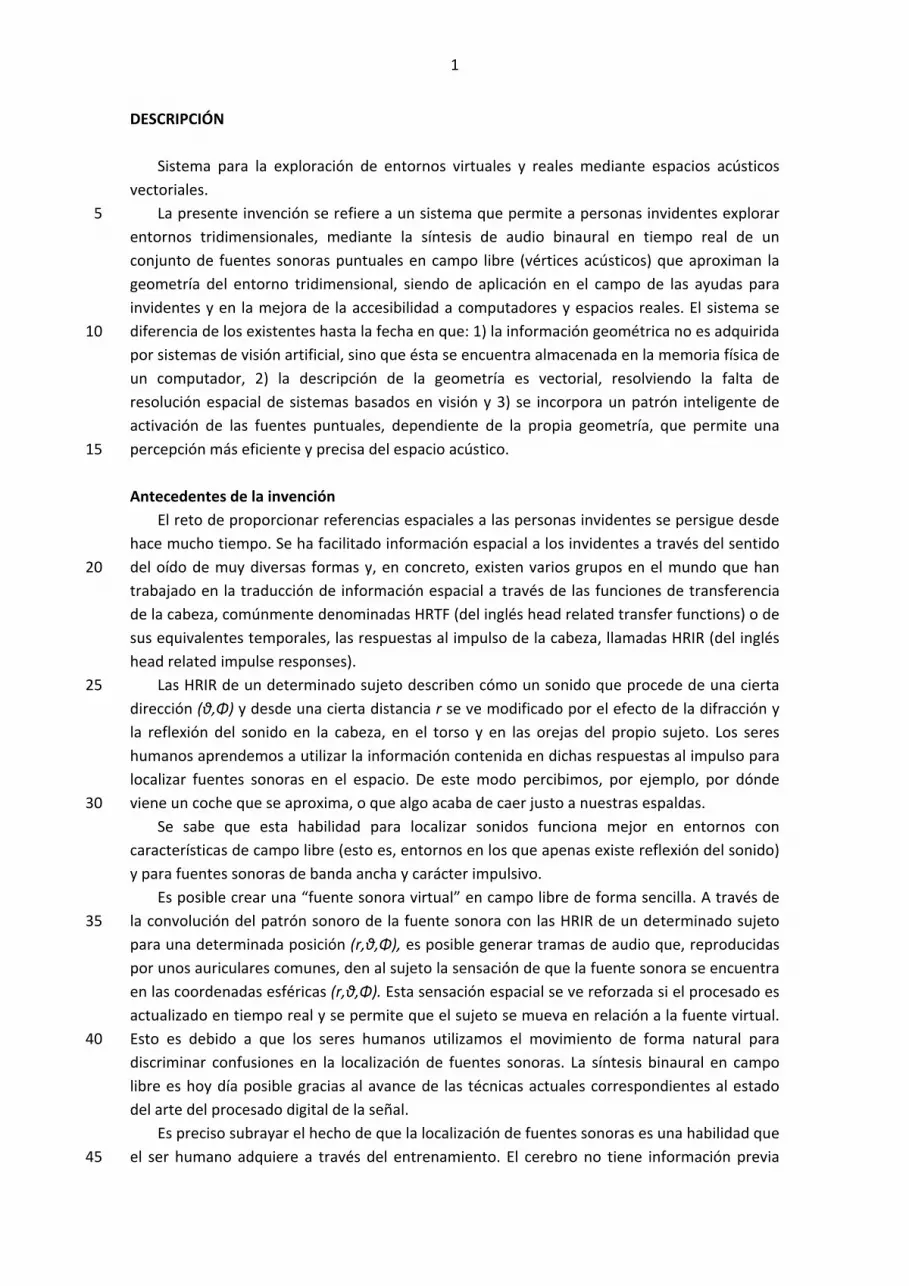
El servidor (1) es el encargado de hacer todo el procesamiento de la información 5 geométrica con restricciones de tiempo real dejando al cliente (2) únicamente las tareas de procesado de audio.
Dentro del servidor, la geometría (3), que consiste en un modelo tridimensional de un dominio espacial, bien creado por ordenador o bien réplica de un entorno real, es traducida mediante un sistema de posicionamiento de vértices (4), en un conjunto de vértices en el 10 espacio que describe la geometría del modelo tridimensional. Este proceso puede realizarse de forma previa (offline) sin restricciones de tiempo real. Al nuevo mapa generado lo denominamos mapa de vértices acústicos (5), en el que cada uno de los vértices se corresponderá con una fuente sonora puntual en el espacio acústico virtual con características de campo libre. 15
La posición y orientación de la cabeza del usuario (8) es registrada por un sistema de seguimiento (9), en el caso de navegación de entornos reales una unidad inercial optativamente complementada con un sistema de radiolocalización basado en la propia implementación de la comunicación mediante los módulos de comunicación del cliente (10) y del servidor(7), y en el caso de navegación de entornos virtuales, bien un sistema inercial, bien 20 un sistema de seguimiento de la cabeza por imagen, con un sistema que mantiene en memoria la posición en el entorno virtual y que permita modificarla mediante un dispositivo HMI (Human‐Machine Interface) tal como un joystick, ratón, teclado o cualquier otro dispositivo al uso.
Ambos conjuntos de datos, la posición y orientación de la cabeza (8) y el mapa de vértices 25 acústicos (5), son transferidos a un sistema (6) que generará la lista de vértices acústicos (11), lista que define la escena en el espacio acústico virtual. Dicha lista contiene la posición de todos los vértices acústicos respecto a la cabeza del sujeto en coordenadas esféricas (ri,θi,Φi), un intervalo temporal ∆ti que implementa el patrón de activación de los vértices acústicos y una o varias etiquetas que transmitirán información adicional acerca de la naturaleza de cada 30 vértice acústico o del objeto al que representan, permitiendo definir una funcionalidad específica asociada a distintos patrones o espectros acústicos.
Para aligerar el procesado de audio que se ha de realizar en el cliente (2) con restricciones de tiempo real, de forma previa (offline) se realiza la convolución de los diferentes patrones monoaurales con las HRIR del usuario en un sistema a tal efecto (13). Como resultado se 35 obtiene la matriz de patrones binaurales de los vértices acústicos (14), una matriz de tramas de audio que alberga todas las combinaciones posibles de los patrones acústicos con todas las posiciones en el espacio acústico virtual.
Dicha matriz de patrones binaurales (14) y la lista de vértices acústicos (11) serán la entrada de un sistema de síntesis binaural en campo libre con restricciones de tiempo real 40 (12). Para generar las tramas de audio binaural, el sistema (12) asociará a cada vértice acústico en la lista (11) un patrón acústico en la matriz de patrones binaurales (14) acorde a su etiqueta y a su posición en el espacio acústico virtual, aplicará los retardos, incluidos en la lista (11), que definen el patrón de activación de los vértices acústicos, y mezclará las tramas en una única

4
trama de audio binaural. Esta trama de audio será entregada al usuario a través de un sistema de reproducción estéreo (15).
Este sistema permite que personas invidentes puedan explorar entornos virtuales, o entornos reales de los que existe una descripción geométrica adecuada, sin tener que recurrir a sistemas de visión artificial. Las técnicas actuales de visión por computador son, a día de hoy, 5 insuficientes para reconstruir realidades tridimensionales en condiciones reales y, por tanto, sujetas a fuertes obstáculos (tráfico de personas y objetos, decoración, iluminación, dinámica del propio sujeto) con la robustez y seguridad necesarias para hacer operativa la navegación en un edificio mediante espacios acústicos virtuales. Sin embargo, la obtención de dicha información geométrica previamente, la utilización de un mapa vectorial del espacio acústico 10 virtual a través de vértices acústicos, capaz de describir con precisión la geometría independientemente de su complejidad, y la utilización de patrones de activación inteligentes, son medidas practicables que dejan expedita la vía para la realización de un sistema con capacidad para mejorar notablemente la movilidad e independencia de las personas invidentes. 15
Descripción de los dibujos
La Figura 1 es un esquema de bloques que describe a grandes rasgos el funcionamiento general del sistema conteniendo los subsistemas: (1) servidor, (2) cliente, (3) descripción geométrica del entorno virtual o real, (4) sistema de posicionamiento de vértices acústicos, (5) 20 mapa de vértices acústicos, (6) generación de la lista de vértices acústicos, (7) módulo de comunicaciones del servidor, (8) posición y orientación de la cabeza del usuario, (9) sistema de seguimiento, (10) módulo de comunicaciones del cliente, (11) lista de vértices acústicos, (12) sistema de síntesis binaural en tiempo real de los vértices acústicos, (13) bloque de convolución de los patrones monoaurales con las HRIR del usuario, (14) matriz de patrones 25 binaurales y (15) sistema de reproducción estéreo.
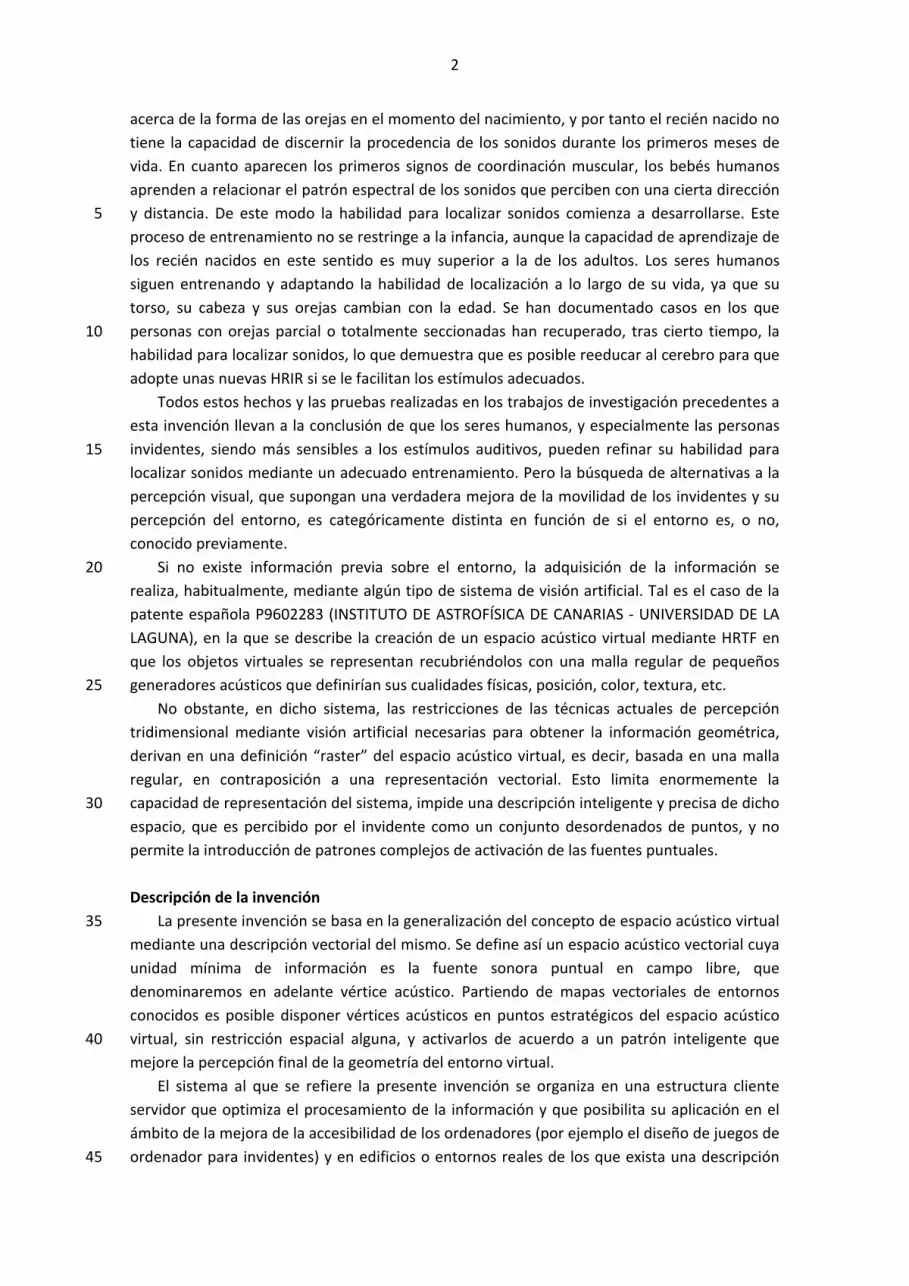
La Figura 2 muestra un esquema de bloques de una posible implementación del sistema de generación de la lista de vértices acústicos (6), conteniendo los subsistemas: bloque de resta de vectores (16), conversión a coordenadas esféricas (17), generación del retardo temporal asociado al patrón de activación de los vértices acústicos (18), resta módulo π (19) y resta 30 módulo 2π (20).
La Figura 3 muestra un esquema de bloques de una posible implementación del sistema de síntesis de audio a tiempo real de los vértices acústicos (12), conteniendo dos sistemas de retardo (21 y 22), dos mezcladores (23 y 24) y dos memorias intermedias (25 y 26). 35 Descripción de una realización preferida
El sistema descrito puede implementarse íntegramente en un ordenador personal, para la generación de una experiencia similar a la de un videojuego en primera persona, sirviendo además de entrenador para el potencial usuario del sistema en entornos reales, o como sistema de interfaz para videojuegos existentes y herramientas informáticas, o puede 40 implantarse en un edificio o espacio controlado, cuya geometría haya sido descrita en un sistema CAD 3D estándar, para aumentar la movilidad y autonomía de las personas invidentes.
En este último caso el sistema servidor (1) estaría constituido por un servidor de procesos, capaz de gestionar la navegación de múltiples usuarios simultáneamente, situado en el propio edificio. Este servidor (1) es el único poseedor y gestor de la información geométrica del 45

5
edificio, liberando al cliente (2) de efectuar los costosos procesamientos geométricos del elevado número de vértices acústicos, y permitiendo a su portador acceder como cliente a un número virtualmente infinito de espacios públicos y privados equipados con el sistema. El cliente (2) estaría compuesto por una unidad de procesamiento digital de señal DSP (digital signal processor), una unidad inercial (9), un sistema de reproducción estéreo (15) y un 5 módulo de comunicaciones (10) que establecería la conexión con el servidor al entrar en el recinto o espacio navegable. El cliente (2) es el único conocedor de la matriz de patrones binaurales que se elabora a partir de las HRIR del usuario. Este hecho hace que el servidor no necesite información previa sobre el usuario, confiriendo al sistema la capacidad de ser general y automáticamente escalable. Es decir, un nuevo usuario solo tendría que disponer del 10 cliente (2) para navegar en recintos o espacios que dispongan de un servidor (1) sin reconfiguración previa de éstos y, análogamente, para implantar un servidor (1) en un nuevo recinto o espacio no es preciso reconfigurar los clientes (2) activos. Opcionalmente, el servidor puede estar dotado de un sistema de control de acceso a clientes registrados. Adicionalmente, la capacidad del servidor para conocer la posición y orientación de los usuarios permite dotar 15 asimismo al servidor de un sistema de protección de los usuarios, de forma que en caso de que se acerquen a algún lugar de riesgo pueden ser avisados de forma personal y totalmente discreta, o, en caso de persistencia, a un servicio de asistencia.
Al iniciar el sistema, el servidor (1) carga la geometría (3) del edificio o espacio cubierto y mediante el subsistema de disposición de vértices acústicos (4) genera el mapa de vértices 20 acústicos (5) y lo almacena en memoria. Esta fase del proceso se realiza únicamente en la puesta en marcha del servidor, por lo que se realiza previamente (offline) sin restricciones de tiempo real.
La posición del usuario en el mapa y la orientación de la cabeza (8) es adquirida por el sistema inercial (9) del cliente (2), transmitida por el módulo de comunicaciones del cliente 25 (10) , recibida por el módulo de comunicaciones del servidor (7) y tramitada como una petición de una nueva lista de vértices acústicos (11) o escena acústica. El servidor (1), mediante el sistema de generación de la lista de vértices (6), para cada vértice i en el mapa de vértices acústicos (5), calcula el vector vi=pi‐ps que va desde la posición del sujeto ps a la posición de la fuente pi mediante un bloque de resta de vectorial (16). El vector vi=(xi,yi,zi), inicialmente en 30 coordenadas cartesianas, es expresado en coordenadas esféricas (ri,θi,Φi) mediante el subsistema (17). Las coordenadas esféricas θ’i y Φ’i son introducidas en dos sistemas (19 y 20) que realizan, respectivamente, la resta módulo π y módulo 2π respecto a las coordenadas esféricas de la orientación de la cabeza del sujeto, es decir θi=|θ’i ‐ θS|π y
Φi=|Φ’i – ΦS|2π. De este modo se obtienen las coordenadas (θ’i, Φ’i) correspondientes a la orientación del vértice i 35 relativo a la orientación de la cabeza del sujeto. El sistema (6) incluye un subsistema (18) con el patrón de activación de los vértices acústicos, asignando a cada vértice i un intervalo ∆ti y creando un patrón temporal que clarifica la percepción del espacio acústico virtual. El criterio de asignación de intervalos del subsistema (18) puede ser tan básico como la asignación de intervalos ∆ti mayores a los vértices más alejados del sujeto, o puede implementar métodos 40 más elaborados que recorran en un orden predefinido las líneas y superficies visibles de la geometría (3). Este patrón de activación se define en el propio servidor (1), pudiendo ser optimizado para las geometrías particulares de cada entorno. El sistema (6) desprecia automáticamente aquellos vértices que se encuentren ocluidos o suficientemente lejos del sujeto, aligerando la carga de computación en el cliente (2). Una vez generada la lista de 45

6
vértices acústicos (11), en tiempo real, es transmitida mediante el módulo de comunicaciones del servidor (7) al módulo de comunicaciones del cliente (10) que la recibe y procesa.
Al igual que el procesamiento offline de la geometría (3) en el servidor (1), la síntesis del audio binaural en el cliente (2) se realiza en dos pasos. Previamente, al configurar el cliente (2) para un nuevo usuario, se realiza la convolución de los patrones monoaurales de los vértices 5 acústicos con las HRIR del usuario (13) para todo ángulo de incidencia y distancia, generando una matriz de patrones binaurales de los vértices acústicos (14) personalizada para el usuario. Esta matriz se almacena en una memoria de acceso rápido en el cliente (2) haciendo posible el procesado en tiempo real.
Para cada vértice de la lista (11), el sistema (12) tomará su posición en coordenadas 10 esféricas y leerá de la matriz de patrones binaurales (14) las tramas de audio correspondientes a dicha posición y clasificación del vértice acústico. Para aumentar la coherencia sonora del espacio acústico, entre posiciones intermedias de la matriz de patrones binaurales (14) se realizará la interpolación de los patrones adyacentes mediante técnicas de “audio morphing”.
Las dos tramas (correspondientes al canal izquierdo y derecho) tomadas de la matriz de 15 patrones binaurales (14) son retardadas el intervalo de tiempo ∆ti definido en la lista de vértices acústicos (11) mediante los sistemas de retardo (21 y 22), son mezcladas con las tramas de los otros vértices acústicos mediante los mezcladores (23 y 24), y almacenadas en sendas memorias intermedias (25 y 26) en espera de ser entregadas al canal izquierdo y derecho del sistema de reproducción estéreo (15). 20

7
REIVINDICACIONES
1. Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos vectoriales que consiste en un sistema servidor (1), un sistema cliente (2), la descripción geométrica de un entorno (3), un sistema de posicionamiento de vértices acústicos (4), un 5 mapa de vértices acústicos (5), un sistema de generación de la lista de vértices acústicos (6), un módulo de comunicaciones de servidor (7), la posición y orientación de la cabeza del usuario (8), un sistema de seguimiento (9), un módulo de comunicaciones de cliente (10), una lista de vértices acústicos (11), un sistema que realiza la síntesis binaural en tiempo real de los vértices acústicos (12), un bloque de convolución de los patrones monoaurales con las HRIR del usuario 10 (13), una matriz de patrones binaurales (14) y un sistema de reproducción estéreo (15).
2. Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos vectoriales según la 1º reivindicación caracterizado por que el sistema de seguimiento se implementa con un sistema inercial en miniatura.
3. Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos 15 vectoriales según la 1ª reivindicación caracterizado por que los sistemas servidor (1) y cliente (2) se implementan físicamente en un mismo dispositivo, para la navegación de entornos virtuales, para el entrenamiento de la navegación en entornos reales, y como herramienta de accesibilidad informática para invidentes.
4. Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos 20 vectoriales según la 3ª reivindicación caracterizado por que el sistema de seguimiento (9) se implementa con un sistema de seguimiento de la posición y orientación de la cabeza basado en una cámara situada en el ordenador frente al usuario.
5. Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos vectoriales según la 1º reivindicación caracterizado por que los sistemas servidor (1) y cliente 25 (2) se implementan en dispositivos físicamente distintos, para la navegación de recintos y espacios reales.
6. Sistema para la exploración de entornos virtuales y reales mediante espacios acústicos vectoriales según la 5ª reivindicación, en el que el servidor (1) está además dotado de un sistema de alerta personal para cuando el usuario se aproxima a una zona de riesgo. 30

8
(15) SISTEMA DE REPRODUCCIÓN
ESTÉREO
(9) MEZCLADOR
(12) SÍNTESIS BINAURAL EN
TIEMPO REAL DE LOS VERTICES
ACÚSTICOS
CLIENTE (2)
ONLINE
(14) MATRIZ DE PATRONES
BINAURALES
(9) MEZCLADOR
(9) GENERACIÓN DEL PATRÓN
BINAURAL DE LOS VÉRTICES
ACÚSTICOS A PARTIR DE LAS
HRTF
OFFLINE
(9) MEZCLADOR
(13) CONVOLUCIÓN DE LOS PATRONES
MONOAURALES CON LAS HRIR DEL USUARIO
SERVIDOR (1)
(6) GENERACIÓN DE LA LISTA DE
VÉRTICES ACÚSTICOS
(6) GENERACIÓN DE LA LISTA DE VÉRTICES
ACÚSTICOS
OFFLINE
ONLINE
(3) GEOMETRÍA
(9) MEZCLADOR(7) MODULO DE COMUNICACIÓN
(8) POSICIÓN Y ORIENTACIÓN DE LA CABEZA
(9) MEZCLADOR(10) MÓDULO DE COMUNICACIÓN
(9) MEZCLADOR(9) SISTEMA
SEGUIMIENTO
(11) LISTA DE VÉRTICES
ACÚSTICOS
(4) GENERACIÓN DEL MAPA DE
VÉRTICES ACÚSTICOS
(4) POSICIONAMIENTO
DE VÉRTICES ACÚSTICOS
(5) MAPA DE VÉRTICES
ACÚSTICOS
(3) GEOMETRÍA
(15) SISTEMA DE REPRODUCCIÓN
ESTÉREO
(9) MEZCLADOR
(12) SÍNTESIS BINAURAL EN
TIEMPO REAL DE LOS VERTICES
ACÚSTICOS
(9) MEZCLADOR
(12) SÍNTESIS BINAURAL EN
TIEMPO REAL DE LOS VERTICES
ACÚSTICOS
CLIENTE (2)
ONLINE
(14) MATRIZ DE PATRONES
BINAURALES
(9) MEZCLADOR
(9) GENERACIÓN DEL PATRÓN
BINAURAL DE LOS VÉRTICES
ACÚSTICOS A PARTIR DE LAS
HRTF
(9) MEZCLADOR
(9) GENERACIÓN DEL PATRÓN
BINAURAL DE LOS VÉRTICES
ACÚSTICOS A PARTIR DE LAS
HRTF
OFFLINE
(9) MEZCLADOR
(13) CONVOLUCIÓN DE LOS PATRONES
MONOAURALES CON LAS HRIR DEL USUARIO
(9) MEZCLADOR
(13) CONVOLUCIÓN DE LOS PATRONES
MONOAURALES CON LAS HRIR DEL USUARIO
SERVIDOR (1)
(6) GENERACIÓN DE LA LISTA DE
VÉRTICES ACÚSTICOS
(6) GENERACIÓN DE LA LISTA DE VÉRTICES
ACÚSTICOS
(6) GENERACIÓN DE LA LISTA DE
VÉRTICES ACÚSTICOS
(6) GENERACIÓN DE LA LISTA DE VÉRTICES
ACÚSTICOS
OFFLINE
ONLINE
(3) GEOMETRÍA(3) GEOMETRÍA
(9) MEZCLADOR(7) MODULO DE COMUNICACIÓN(9) MEZCLADOR(7) MODULO DE COMUNICACIÓN
(8) POSICIÓN Y ORIENTACIÓN DE LA CABEZA
(9) MEZCLADOR(10) MÓDULO DE COMUNICACIÓN(9) MEZCLADOR(10) MÓDULO DE COMUNICACIÓN
(9) MEZCLADOR(9) SISTEMA
SEGUIMIENTO(9) MEZCLADOR(9) SISTEMA
SEGUIMIENTO
(11) LISTA DE VÉRTICES
ACÚSTICOS
(11) LISTA DE VÉRTICES
ACÚSTICOS
(4) GENERACIÓN DEL MAPA DE
VÉRTICES ACÚSTICOS
(4) POSICIONAMIENTO
DE VÉRTICES ACÚSTICOS
(4) GENERACIÓN DEL MAPA DE
VÉRTICES ACÚSTICOS
(4) POSICIONAMIENTO
DE VÉRTICES ACÚSTICOS
(5) MAPA DE VÉRTICES
ACÚSTICOS
(5) MAPA DE VÉRTICES
ACÚSTICOS
(3) GEOMETRÍA(3) GEOMETRÍA
Figura 1

9
(8) POSICIÓN Y ORIENTACIÓN DE LA CABEZA DEL USUARIO
POSICIÓN i DE LA LISTA
DE VÉRTICES
ACÚSTICOS (11)
(6) GENERACIÓN DE LA LISTA DE VÉRTICES ACÚSTICOS
POSICIÓN DEL VÉRTICE i EN EL
MAPA DE VÉRTICES
ACÚSTICOS (5)
pi=(xi,yi,zi)
pS=(xS,yS,zS)
θS
(16) RESTA DE VECTORES
vi=pi-pS
ri
∆ti(17) CONVERSIÓN A
COORDENADAS ESFÉRICAS
(18) GENERACIÓN DEL RETARDO
TEMPORAL
θ'i
θS
(19) RESTA MODULO π
φ'i
φS
(20) RESTA MODULO 2π
θi
φi
φS
(8) POSICIÓN Y ORIENTACIÓN DE LA CABEZA DEL USUARIO
POSICIÓN i DE LA LISTA
DE VÉRTICES
ACÚSTICOS (11)
(6) GENERACIÓN DE LA LISTA DE VÉRTICES ACÚSTICOS
POSICIÓN DEL VÉRTICE i EN EL
MAPA DE VÉRTICES
ACÚSTICOS (5)
pi=(xi,yi,zi)
pS=(xS,yS,zS)
θS
(16) RESTA DE VECTORES
vi=pi-pS
(16) RESTA DE VECTORES
vi=pi-pS
ri
∆ti(17) CONVERSIÓN A
COORDENADAS ESFÉRICAS
(18) GENERACIÓN DEL RETARDO
TEMPORAL
θ'i
θS
(19) RESTA MODULO π
φ'i
φS
(20) RESTA MODULO 2π
θi
φi
φS
Figura 2
(11) POSICIÓN i DE LA LISTA DE VÉRTICES ACÚSTICOS
L
Rri,θi,φi
∆ti(21) RETARDO
δ(t-∆t)
(12) SÍNTESIS BINAURAL EN TIEMPO REAL DE LOS VÉRTICES ACÚSTICOS
(22) RETARDO δ(t-∆t)
(23) MEZCLADOR IZQUIERDO
(24) MEZCLADOR
DERECHO
(15) SISTEMA DE REPRODUCCIÓN
ESTÉREO
CANAL IZQUIERDO
CANAL DERECHO(14) MATRIZ
DE PATRONES
BINAURALES
(25) BUFFER
(26) BUFFER
L
R
(11) POSICIÓN i DE LA LISTA DE VÉRTICES ACÚSTICOS
L
Rri,θi,φiri,θi,φi
∆ti(21) RETARDO
δ(t-∆t)
(12) SÍNTESIS BINAURAL EN TIEMPO REAL DE LOS VÉRTICES ACÚSTICOS
(22) RETARDO δ(t-∆t)
(23) MEZCLADOR IZQUIERDO
(24) MEZCLADOR
DERECHO
(15) SISTEMA DE REPRODUCCIÓN
ESTÉREO
CANAL IZQUIERDO
CANAL DERECHO(14) MATRIZ
DE PATRONES
BINAURALES
(25) BUFFER
(26) BUFFER
L
R
Figura 3