sustainable workforce scheduling in construction program management
TRANSCRIPT

Sustainable workforce scheduling inconstruction program managementL Florez
1, D Castro-Lacouture
1� and AL Medaglia2
1Georgia Institute of Technology, Atlanta, GA, USA; and
2Universidad de los Andes, Bogota,
Colombia
The multimode resource-constrained project scheduling problem (MRCPSP) deals with the schedulingof a set of projects with alternative requirements of renewable and non-renewable resources. Solutions tothe MRCPSP usually consider objectives in terms of cost and time. However, social objectives relatedwith the workforce may impact the performance of projects and affect program sustainability goals. Toaccount for this new social input, this paper extends the MRCPSP and proposes a new multiobjectivemixed-integer programming model. The proposed solution method uses an a priori lexicographicordering of the objectives, followed by an e-constraints approach. The model is illustrated with a casestudy of a construction program.
Journal of the Operational Research Society (2013) 64, 1169–1181. doi:10.1057/jors.2012.164
Published online 12 December 2012
Keywords: construction; project management; integer programming; scheduling
Introduction
Project scheduling is an important task in project manage-
ment (Hartmann and Briskorn, 2010). The selection of
resources and the harmonization of their work make
project scheduling crucial for the success of a construction
project for both the owner and contractor (Jaskowski and
Sobotka, 2006). The classical resource-constrained project
scheduling problem (RCPSP) deals with the scheduling
of a given set of projects considering renewable and non-
renewable resource constraints. Renewable resources
(Jaskowski and Sobotka, 2006) such as workers and
machines are available every period during the planning
horizon while non-renewable resources such as budget are
available only at the beginning of the planning horizon and
are consumed as projects are executed. Optimal schedules
usually mean that evaluation criteria such as time and cost
are met (Jaskowski and Sobotka, 2006). However, the
project scheduling problem currently lacks a method that
helps decision-makers to optimally schedule projects while
considering social sustainability measures that may benefit
workers as well as the program manager and owner.
Social sustainability is an opportunity to achieve better
standards of living and increase the well being of people
(Alwaer and Clements-Croome, 2010) by implementing
practices that can be maintained in time. These practices
promote the development of socially responsible ways to
manage people by considering people’s needs and expecta-
tions. A number of studies have identified criteria to pro-
mote social sustainability (Labuschagne et al, 2005; Ugwu
and Haupt, 2005; Singh et al, 2007; Alwaer and Clements-
Croome, 2010; Fernandez-Sanchez and Rodriguez-Lopez,
2010; Tahir and Darton, 2010). Social sustainability is
achieved in a project when factors such as its duration
(Ramos and Caeiro, 2010), geographical location (Ramos
and Caeiro, 2010), impact on stakeholders (Fernandez-
Sanchez and Rodriguez-Lopez, 2010), safety (Ugwu and
Haupt, 2005), design process (Alwaer and Clements-
Croome, 2010), and employment generation (Labuschagne
et al, 2005) are considered. In order to achieve social sus-
tainability when planning and scheduling projects, pro-
gram managers need tools that can help them assess their
performance (Fernandez-Sanchez and Rodriguez-Lopez,
2010). Indicators are metrics to measure performance
across a range of sustainable principles (Singh et al, 2009).
Indicators help visualize phenomena and highlight trends
(Singh et al, 2009) and can provide useful evidence to
support project management (Fernandez-Sanchez and
Rodriguez-Lopez, 2010).
In this paper, we aim to assist program managers and
decision-makers when dealing with the challenge of plann-
ing a construction program to achieve social sustainability
by developing a multiobjective mixed-integer program that
schedules projects and assigns workers. A construction
program is defined as a set of projects with the ability of
sharing resources among them (Reiss, 1996). A schedule
Journal of the Operational Research Society (2013) 64, 1169–1181 © 2013 Operational Research Society Ltd. All rights reserved. 0160-5682/13
www.palgrave-journals.com/jors/
�Correspondence: D Castro-Lacouture, School of Building Construction,
Georgia Institute of Technology, 280 Ferst Drive, 1st Floor, Atlanta, GA
30332, USA.
E-mail: [email protected]

provides a coherent process that includes all operations to
allocating resources while satisfying all constraints (Pinedo,
2005). Note that the model does not schedule the different
tasks or activities within a project; it assumes that the
schedule for the tasks (with precedence relations) is known
in advance. To account for social sustainability, one of the
objectives of the model is to maximize labour stability,
while simultaneously considering cost and time objectives.
The model includes both renewable (machines and work-
ers) and non-renewable (financial capital) resource con-
straints to address realistic scenarios experienced by the
program manager. In addition, the model determines
detailed working patterns, that is, the time periods when
workers are using certain skills, as well as the best time
when they need to be hired, fired, or shift between skills.
This paper is organized as follows. We first provide
a review of the project scheduling literature as well as
objectives that achieve social sustainability. Then, we pre-
sent the optimization model and the solution strategy,
followed by an illustration of the operation of the model
on a case study of a construction program. Finally, we con-
clude the paper and outline opportunities for future
research.
Literature review
In the RCPSP, each activity has a single execution mode,
that is, both the activity duration and its resource require-
ments are fixed and known in advance. There are several
approaches to solve the RCPSP. Li and Willis (1993)
presented a heuristic approach to schedule projects and
evaluate the cost/time trade-off when implementing re-
planning of activities. Zhu et al (2005) developed a mixed-
integer program to schedule projects when a disruption is
presented and the activities need to get on track at the
minimum cost and deviation from the original schedule.
Jaskowski and Sobotka (2006) proposed an evolutionary
algorithm to minimize the schedule duration, while con-
sidering limited accessibility of renewable resources. A
review of variants and extensions of the RCPSP can be
found in Hartmann and Briskorn (2010).
An extension of the RCPSP is the multimode resource-
constrained project scheduling problem (MRCPSP), which
considers that projects can be executed in different modes.
Each mode represents an alternative combination of
renewable and non-renewable resources and the quantities
employed to fulfil a given project (Zhang et al, 2006). The
corresponding project duration is a function of the quanti-
ties of resources used, that is, a project can be accelerated
by increasing the quantities coming into operation
(Hartmann, 2001). The methodologies for solving the
MRCPSP that have been proposed include various
approaches. For instance, Zhang et al (2006) proposed a
methodology based on particle swarm optimization (PSO)
in which the solution is represented in terms of priority and
mode combination of projects. Sprecher and Drexl (1998)
proposed a branch and bound methodology with an
enumeration scheme that increases the efficiency of the tree
exploration. Hartmann (2001) proposed a genetic algo-
rithm using two local search methods to deal with the
feasibility problem of the MRCPSP and to improve the
schedules. El-Rayes and Moselhi (2001) proposed a
dynamic programming approach, which is focused on
crews that can be allocated in multiple modes. Recently,
Palacio (2010) proposed a mixed-integer program to solve
the MRCPSP with minimum and maximum time lags.
None of these methods, as implemented, help decision-
makers schedule projects in order to maximize their social
sustainability performance while still meeting cost and time
requirements.
Labour in construction
People are an organization’s most valuable asset and this is
especially true in relatively labour intensive industries such
as construction (Loosemore et al, 2003). In construction,
labour costs on a project may account for 30–50% of the
total project costs (Adrian, 1987). However, project
management strategies have focused on planning opera-
tions without attention being paid to the human resource
factor (Belout, 1998). In the construction industry, the lack
of opportunities for training and career growth result in
high turnover rates while construction companies have
difficulties maintaining and recruiting construction work-
force (Gomar et al, 2002). People, unlike other resources,
have their own needs and requirements beyond the
financial compensation for their work. Workers place a
great value on requirements such as involvement, respect,
and sense of personal growth (Lingard and Sublet, 2002).
Because of their needs and requirements, workers may
represent the most difficult resource for organizations to
manage, but when managed effectively can bring consider-
able benefits (Loosemore et al, 2003). For instance, a
project that offers continual employment allows contrac-
tors to not only use workers more efficiently and at lesser
cost, but also helps generate a sense of commitment to the
job from the workers (MacKenzie et al, 2010). At the same
time, an increase in employment duration may help train
workers and resolve the skills shortage problem within the
construction industry (Gomar et al, 2002; Srour et al, 2006;
MacKenzie et al, 2010). Projects receive greater loyalty
from their workers and better productivity where condi-
tions are set to provide improved career opportunities and
more equitable workplace environments (Loosemore et al,
2003). By considering their needs and expectations,
construction projects may not only benefit current workers
but may also help attract other workers and be sustainable
over time.
1170 Journal of the Operational Research Society Vol. 64, No. 8

Multiskilling
Construction is a labour intensive as well as craft-based
activity and the behaviour of people has a direct impact on
the performance of construction projects (Lill, 2008). The
poor image of the construction industry is partially due to
the lack of opportunities for training and career growth
resulting in high turnover rates (Gomar et al, 2002). A
contributing factor for this problem is the single-skill strategy
amply used in construction (Burleson et al, 1998). This
strategy is characterized by the irregularity of the workload
(Lill, 2008) and fluctuations of workforce that lead to
workers facing the problem of short employment duration,
frequent layoffs, and periods of unemployment between jobs
(Gomar et al, 2002). Because of the discontinuity of job
assignments (El-Rayes and Moselhi, 2001) and the feeling of
purposelessness due to idle time in the job site, the single-skill
strategy impacts the attitude of workers. Workers believe
that there is lack of respect and opportunities for training,
factors that act to lower the overall craft efficiency (Gomar
et al, 2002) and workers’ general satisfaction (Lill, 2008).
Additionally, workers’ variations make it difficult to distri-
bute and coordinate crews, which leads to delays and rework
(Burleson et al, 1998). Therefore, sustainable development in
the construction industry has to consider not only building
technologies and materials but also respectful and consider-
ate labour management strategies (Lill, 2008). One of such
strategies is multiskilling.
Multiskilling is a labour technique in which workers are
able to perform several trades. With multiskilling, workers
may have longer employment durations, continuity of job
assignments, and reduced idle time (Gomar et al, 2002). The
benefits of multiskilling include increases in productivity,
quality, and continuity of work as well as safer worksites
and flexibility to managers in assigning tasks (Burleson
et al, 1998; Gomar et al, 2002). Furthermore, multi-skilled
workers have a broader variety of skills that makes them
adaptable to unforeseen activities and allows the manager
more flexible utilization of their capacities (Lill, 2008). An
extensive work has been carried out to solve multiskilling
decisions and project scheduling problems. Jun and
El-Rayes (2010) developed a model to optimally plan and
schedule multiple shifts in construction projects using three
modules to retrieve input data, develop shift schedules, and
identify optimal trade-offs between project criteria in
different shifts. Hyari et al (2010) developed an optimization
model to assign multi-skilled workers with the purpose of
minimizing total labour project costs. Wongwai and
Malaikrisanachalee (2011) proposed a heuristic algorithm
for multi-skilled resource scheduling in which substitution of
resources is allowed. Srour et al (2006) developed a linear
program model that provides a strategy for training and
hiring workers to satisfy schedule requirements. However,
there is no method that quantifies the social sustainability
performance of scheduling.
Labour stability indicator
From the above definition of multiskilling and based on
social indicators from previous studies (Labuschagne et al,
2005; Singh et al, 2007; Ramos and Caeiro, 2010), we
developed an indicator to measure social performance of
projects. The indicator defined as labour stability quantifies
the project’s capability of maintaining a stable crew work-
force. Stabilizing the workforce may result in an increase in
employment duration and job continuity. To account for
this social indicator, two alternatives of labour stability
are proposed. The first alternative minimizes the maximal
labour fluctuation, that is, minimizes the largest change
on the number of workers between any pair of consecutive
periods. The second alternative minimizes the sum of
fluctuations, that is, minimizes the absolute variation
of workers along the planning horizon (a linear proxy of
variance).
Optimization model and solution strategy
The proposed model smoothes the allocation of workers
to the project schedule to avoid drastic measures while
maintaining a stable workforce. The proposed model is
based on the one by Medaglia et al (2008), which was later
extended by Palacio (2010) for the MRCPSP/max (with
time lags). Despite the fact that some building blocks
are shared, modelling labour stability brings several new
elements and challenges into the model that makes it
unique on its own.
Model formulation
The formulation includes the set of projects I, the set of
machines N, the set of workers J, and the set of skills
among all workers R. The set Jr contains the workers with
skill r, and conversely, the set Rj contains the skills of
worker j. The set Mi represents the available execution
modes for project i.
The model also includes parameter T representing the
length of the planning horizon. Parameters chire, cfire, cshift,
and cjwage represent the cost of hiring a worker, the cost of
firing a worker, the cost of switching a worker across
different skills, and the wage (per period of time) of worker
j, respectively. The earliest and latest starting times for
project i are represented by parameters ti� and ti
þ ,respectively. Parameter bt represents the available budget
for time t. The lifespan of project i if executed in mode m is
denoted by vim. Parameter cikminv represents the investment
cost in project i in period k in mode m. The number of
machines n needed by project i in period k in mode m is
given by parameter qnikm, while the number of workers
with skill r needed by project i in period k in mode m is
given by parameter drikm. The availability of machines n in
time t is denoted by pnt. The binary parameter ajt takes the
L Florez et al—Sustainable workforce scheduling in construction program management 1171

value of 1 if worker j is available in period t; it takes the
value of 0, otherwise.
The structural binary variable yitm takes the value of 1 if
project i is scheduled to start at time t in mode m; it takes
the value of 0, otherwise. In addition, the (auxiliary) binary
variable xiktm takes the value of 1 if period k of project i
executed in modem is scheduled in time t; it takes the value
of 0, otherwise. For the assignment of workers, the binary
variable wjrt takes the value of 1 if worker j works in skill r
at time t; it takes the value of 0, otherwise. The binary
variable hjt takes the value of 1 if worker j is hired at the
beginning of time t, it takes the value of 0, otherwise. The
binary variable fjt takes the value of 1 if worker j is fired at
the beginning of time t; it takes the value of 0, otherwise.
The binary variable sjt takes the value of 1 if worker j shifts
skills between times t�1 and t; it takes the value of 0,
otherwise. Variable �wt represents the amount of labour
working in the scheduled projects at time t (where �w0 � 0).
The auxiliary variables �c labourt and �c inv
t denote the labour
and investment cost incurred at time t, respectively. Vari-
able dthire represents the workers hired in time t (ie, increase
of labour between times t�1 and t) and variable dtfire
represents the workers fired in time t (ie, decrease of labour
between times t�1 and t). The decision variable Cmax
represents the completion time of the latest project in the
schedule. The decision variable D represents the largest
labour difference from time t�1 to time t (in any given pair
of consecutive time periods). The proposed multiobjective
mixed-integer program follows:
min f1 ¼ Cmax ð1Þ
min f2 ¼XTt¼1
clabourt þ cinvt
� �ð2Þ
min f3 ¼f 13 ¼ Dor
f 23 ¼PTt¼1
dhiret þ dfiret
� �8>><>>:
ð3Þ
subject to,
CmaxX tþ vi;m � 1� �
� yi;t;m;
i 2 I ;m 2Mi; t ¼ t�i ; . . . ;min tþi ;T � vi;m þ 1� �
ð4Þ
Xm2Mi
Xmin tþi;T�vi;mþ1f g
t¼t�i
yi;t;m ¼ 1; i 2 I ð5Þ
Xvi;mk¼1
xi;k;tþk�1;m ¼ vi;m� yi;t;m;
i 2 I ;m 2Mi; t ¼ t�i ; . . . ;min tþi ;T � vi;m þ 1� �
ð6Þ
Xi2I
Xm2Mi
Xvi;mk¼1
qn;i;k;m�xi;k;t;mppn;t;
n 2 N; t ¼ 1; . . . ;T
ð7Þ
Xr2Rj
wj;r;tp1; j 2 J; t ¼ 1; . . . ;T ð8Þ
Xi2I
Xm2Mi
Xvi;mk¼1
dr;i;k;m� xi;k;t;mpXj2Jr
aj;t�wj;r;t;
r 2 R; t ¼ 1; . . . ;T ð9Þ
clabourt ¼Xj2J
�chire� hj;t þ cfire� fj;t þ cshift� sj;t:
þXr2Rj
cwagej �wj;r;t
�; t ¼ 1; :;T ð10Þ
cinvt ¼Xi2I
Xm2Mi
Xvi;mk¼1
cinvi;k;m�xi;k;t;m; t ¼ 1; . . . ;T ð11Þ
cinvt þ clabourt pbt; t ¼ 1; . . . ;T ð12Þ
�wt ¼Xj2J
Xr2Rj
wj;r;t; t ¼ 1; . . . ;T ð13Þ
�wt ¼ �wt�1 þ dhiret � dfiret ; t ¼ 1; . . . ;T ð14Þ
dhiret pD; t ¼ 1; . . . ;T ð15Þ
dfiret pD; t ¼ 1; . . . ;T ð16Þ
hj;t þ fj;tp1; j 2 J; t ¼ 1; . . . ;T ð17ÞXr2Rj
wj;r;t ¼hj;t; j 2 J; t ¼ 1 ð18Þ
Xr2Rj
wj;r;t ¼Xr2Rj
wj;r;t�1þhj;t � fj;t;
j 2 J; t ¼ 2; . . . ;T
ð19Þ
wj;r 0 ;t�1 þX
r2Rjn r 0f gwj;r;t � 1psj;t;
j 2 J; r0 2 Rj; t ¼ 2; . . . ;T
ð20Þ
yi;t;m 2 0; 1f g;i 2 I ;m 2Mi; t ¼ t�i ; . . . ;min tþi ;T � vi;m þ 1
� �ð21Þ
xi;k;tþk�1;m 2 0; 1f g;i 2 I ;m 2Mi; k ¼ 1; . . . ; vi;m;
t ¼ t�i ; . . . ;min tþi ;T � vi;m þ 1� �
ð22Þ
wj;r;t 2 0; 1f g; j 2 J; r 2 Rj; t ¼ 1; . . . ;T ð23Þ
hj;t; fj;t; sj;t 2 0; 1f g; j 2 J; t ¼ 1; . . . ;T ð24Þ
1172 Journal of the Operational Research Society Vol. 64, No. 8

�wt; dhiret ; dfiret 2 Z1þ; t ¼ 1; . . . ;T ð25Þ
D;Cmax 2 Z1þ ð26Þ
clabourt X0; t ¼ 1; . . . ;T ð27Þ
cinvt X0; t ¼ 1; . . . ;T ð28Þ
The model pursues three objectives: minimizes the total
execution time when scheduling all projects in (1),
minimizes the total labour and investment costs over the
planning horizon in (2), and maximizes labour stability.
The latter objective is achieved by either minimizing the
maximal labour fluctuation—see f31 in (3)—or by minimiz-
ing the sum of fluctuations—see f32 in (3). The group of
constraints in (4) sets Cmax to the completion time of the
latest project in the schedule. The set of constraints in (5)
guarantees that every project is executed in any given
mode. The set of constraints in (6) activates the corre-
sponding x variables when a given project is scheduled at a
given time and mode. The set of constraints in (7)
guarantees that the schedule does not exceed the machines
available at any given time along the planning horizon. The
set of constraints in (8) forces a worker to use at most one
skill at any given time. The group of constraints in (9)
guarantees that at any time, the available workforce is able
to fulfil the demand of labour with a given skill. The labour
and investment costs in time t are defined by expressions
(10) and (11), respectively. The group of constraints in (12)
guarantees that the investment cost plus the labour cost do
not exceed the available budget at any given time. The
expression in (13) denotes the labour working in
time t. Note that these workers might not be available
(eg, on vacation), but they are hired. The set of constraints
in (14) accounts for the labour fluctuation between
consecutive time periods t�1 and t. The bound constraints
in (15) and (16) define the largest labour fluctuation. The
set of constraints in (17) guarantees that firing and hiring
events are mutually exclusive (when they happen). Note
that constraints (18) and (19) trigger a firing event if a given
worker j works in time t�1, but not in time t; while they
trigger a hiring event if a given worker does not work in
time t�1, but does in time t. The group of constraints in
(20) indicates if a given worker shifts skills from time t�1to time t. Variable-type constraints (21), (22), (23), and (24)
define variables y,x,w, h, f, and s as binary. Constraints
(25) and (26) define variables �w, dhire, dfire, D, and Cmax as
non-negative integers. Finally, constraints (27) and (28)
account for the non-negativity of �c labourt and �c inv
t .
Solution strategy
To solve the multiobjective mixed-integer program defined
by (1)–(28), we used an a priori lexicographic ordering of
the objectives (Steuer, 1989) followed by an e-constraints
approach (Chankong and Haimes, 1983). In contrast to
methods designed to unveil a whole set of non-dominated
solutions (ie, construction programs), the proposed inter-
active approach narrows the solutions to only those with a
good compromise of objectives (Alves and Clımaco, 2007).
In summary, our solution approach first gives top priority
to the completion time of the projects, followed by mini-
mizing the overall cost, and finally, it achieves labour
stability without deteriorating too much the previously
attained objectives. A similar solution approach has been
successfully applied to solve multiobjective mixed-integer
optimization models arising in the context of locating
new neighbourhood parks in a city (Sefair et al, 2011)
and restructuring the Colombian coffee supply network
(Villegas et al, 2006).
The solution strategy is divided into three phases (see
Figure 1). In the first phase, the objective f1 is optimized in
isolation, subject to constraints (4)–(28), referred as to the
solution space O. The optimal value for this first phase is
denoted by f �1. Note that while minimizing completion
time, there are no costs involved in the objective f1.
Without being a minimum-cost schedule, it is possible, for
instance, that the shift variables sj, t in constraint (20) might
activate without being absolutely necessary, thus giving rise
to a more expensive schedule. By incorporating the second
phase, we find a schedule with the same completion time,
but with a tighter cost that penalizes, among other things,
useless shifts (penalized by cshift). In the second phase, we
find a tighter solution in terms of cost by optimizing f2,
subject to the same set of constraints that define solution
space O. Aside from minimizing cost, we want a
construction program that does not take longer than the
schedule found earlier in the first phase. Thus, we enforce
the following additional constraint:
Cmaxpf �1 ð29Þ
The optimal value for this second phase is denoted by f �2.Then, in the third phase, we optimize either one of the two
versions of labour stability, without a significant sacrifice on
the optimal completion time or the total overall cost. If we
optimize f 31, we make as small as possible the largest labour
fluctuation; but, if we decide to optimize f 32, we make as
small as possible the sum of absolute fluctuations. In the
third phase, aside from the constraints that define the solu-
tion space O, we enforce constraints to limit the compro-
mise on the completion time and overall cost as follows:
Cmaxpf �1 1þ a1ð Þ; a1 2 ½0; 1� ð30Þ
XTt¼1
clabourt þ cinvt
� �pf �2 1þ a2ð Þ; a2 2 ½0; 1� ð31Þ
The constraint shown in (30) guarantees that the
new total completion time is at most a1% away from
L Florez et al—Sustainable workforce scheduling in construction program management 1173

the best time given by f �1, where a1 represents the
maximum allowable deterioration of objective (1).
On the other hand, the constraint shown in (31)
guarantees that the labour and investment costs are
at most a2% away from the minimum overall cost given
by f �2, where a2 represents the maximum allowable
deterioration of the objective (2). In other words, in
the third phase we find a construction program that
minimizes either f 31 or f 3
2, allowing some tolerable
deterioration in the completion time and overall cost
defined by parameters a1 and a2, defined by the decision-
maker.
Model extensions
We could further extend the mathematical program
defined in (1)–(28) to incorporate additional considera-
tions. For instance, in some contexts, projects might be
subject to precedence relations (Medaglia et al, 2008).
Let the set of precedence relations between projects be
Input parameters:
Projects and modesResource requirementsAvailability of resourcesWorkers (skills and costs)Planning horizonEarliest and latest starting times
Optimization procedure
SolutionOK?
no
Time (makespan)constraint
yes
Project Ganttchart
Project resourceconsumption
Workersassignment
Optimization procedure
SolutionOK?
no
Cost and timeallowable
deteriorations
Minimizing time
Maximizing laborstability
Optimization procedure
SolutionOK?
Labor stability
no
Start
yes
yes
End
Ph
ase
1P
has
e 3
Ph
ase
2
Minimizing cost
-----
-
Figure 1 Flow diagram of the solution strategy.
1174 Journal of the Operational Research Society Vol. 64, No. 8

denoted by A, that is, if project iAI precedes project i0AI,
then (i, i0)AA. In other words, it is required for project
iAI to be completed before project i0AI starts. The
following set of constraints enforces the precedence
relations between projects:
yi 0;t 0;m 0pXm2Mi
Xmin tþi;t 0�vimf g
t¼t�i
yi;t;m 0 ; ði; i 0Þ 2 A;m0 2Mi 0 ;
t0 ¼ t�i 0 ; . . . ;min tþi 0 ;T � vi 0;m 0 þ 1� �
ð32Þ
We now show how the assumption of having fixed
resources can be easily relaxed, leading to a more flexible
model that handles (automatically) the addition of
resources at some expense. Let lnt represent the marginal
cost of adding machines of type n at time t, and variable Dnt
denote the additional amount of machines n at time t. To
accommodate this change to the base model defined by
(1)–(28), we replace Equations (7) and (11) by the following
equations:
Xi2I
Xm2Mi
Xvi;mk¼1
qn;i;k;m�xi;k;t;mppn;t þ Dn;t;
n 2 N; t ¼ 1; . . . ;T ð33Þ
cinvt ¼Xi2I
Xm2Mi
Xvi;mk¼1
cinvi;k;m�xi;k;t;m þXn2N
Dn;tln;t;
t ¼ 1; . . . ;T ð34Þ
Similarly, the model could be further extended to
subcontract or add additional resources, including labour.
Case study: scheduling a construction program
To illustrate how the solution strategy works, let us
consider a construction program comprised of 10 projects.
Assume each project ranges from 5000m2 to 8000m2 in
area and is about 10-11 storeys high. The projects’ sched-
ule and duration of activities are known in advance.
The dates of completion of the projects are obtained
from each particular owner. Based on these dates
and considering technical requirements, the earliest
and latest times for each project are determined. The
planning horizon is 36 time periods, that is, the program
manager has to schedule the projects so that they are all
completed at the latest in time period 36. For the case
study, using the cost of shifting a worker (Burleson et al,
1998), administrative costs of hiring and firing (Srour
et al, 2006), workers’ wages (RSMeans, 2012) and costs
of construction crews (RSMeans, 2012), the proportion
between costs was calculated to forecast the costs for the
model. Costs were divided by a factor of 100. We
considered one-skill workers and multi-skilled workers
(two or three skills). Based on the skill groupings in
Burleson et al (1998), three skills and thus three wages
are considered: general support (USD 5), mechanical
(USD 7), and civil/structural (USD 8). No electrical
work is considered. The wage for multi-skilled workers is
the largest among the groupings. The number of skills
and the number of machines required in each period of
time were generated randomly, ranging from zero to
three. Based on the number of workers and machines
required by the projects, the availability of machines and
workers was determined. The supply had variations in
Table 1 Value of the objectives for the 10-project construction program case study
Objective function
Minimizetime (Phase 1)
Minimizecost (Phase 2)
Minimize maximalfluctuation (Phase 3)
Minimize sum offluctuations (Phase 3)
Completion time 30 (100%) 30 (100%) 31 (103.33%) 31 (103.33%)Total expense USD 13025 (142.47%) USD 9142 (100%) USD 9321 (101.96%) USD 9315 (101.89%)Maximal fluctuation 14 (466.67%) 15 (500%) 3 (100%) 9 (300%)Sum of fluctuations 123 (351.43%) 52 (148.57%) 48 (137.14%) 35 (100%)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
p1p2p3p4p5p6p7p8p9p10
ProjectTime period
Figure 2 Schedule for the third phase (maximal fluctuation).
L Florez et al—Sustainable workforce scheduling in construction program management 1175

the number of resources per time period, reflecting
changing availability of workers due to vacation or
machine capacity due to maintenance.
For the first phase, the program manager considers as
the top-priority criterion the completion time. Thus, when
the completion time (1) is minimized subject to constraints
(4)–(28), the optimal solution is that the projects are
finished in 30 time periods. This solution accounts for a
total expense across the projects of USD 13025, a maximal
labour fluctuation of 14 workers, and a sum of fluctuations
of 123. In other words, there is a change of 14 workers
between two consecutive periods and a total of 123 hires
and/or fires along the planning horizon. For the second
phase, the program manager wants to find a tighter
solution in terms of cost, without deteriorating the mini-
mum completion time attained in the first phase. Hence,
the right-hand side of constraint (29) is equal to 30. When
the labour and investment costs (2) are minimized subject
to constraints (4)–(29), then the total expense across
the projects is USD 9142 (a 29.8% cost reduction), the
maximal labour fluctuation is 15 workers, and the sum of
fluctuations is 52.
For the third phase, the manager wants to maximize
labour stability, but still wants the construction program to
be tight in terms of time and cost. Thus, he/she determines
a value of a1 equal to 5% and a value of a2 equal to 2%,
meaning that a deterioration of up to 5% of the com-
pletion time and 2% of the labour and investment costs are
allowed, respectively. Hence the right-hand side of con-
straint (30) is equal to 31.5 and the right-hand side of
constraint (31) is equal to 9324.84. To achieve labour
stability, the manager minimizes the maximal labour
fluctuation or alternatively minimizes the sum of fluctua-
tions (3). When the maximal labour fluctuation is mini-
mized, subject to constraints (4)–(28) and constraints (30)
and (31), the maximal labour fluctuation is three workers.
Note that this solution accounts for a total expense of
USD 9321, a completion time of 31 time periods, and a
sum of labour fluctuations of 48. A second version of
labour stability can be accomplished by minimizing the
absolute sum of fluctuations, that is, an expression that
shares the same spirit of variance, but linearly. This second
version is solved under the same conditions as that of
maximal labour fluctuation, that is, subject to constraints
(4)–(28), (30) and (31), and values of a1¼ 5% and a2¼ 2%,
respectively. When the sum of labour fluctuations is
minimized, the maximal labour fluctuation is nine workers
and the sum of fluctuations is 35. Note that this solution
accounts for a total expense of USD 9315 and a comple-
tion time of 31 time periods. Table 1 shows the results for
the three phases in terms of the objectives sought. Note
that values in bold in the table denote the objective being
optimized.
Table 1 also shows the results relative to the best
achievable value for each objective. For instance, when
minimizing the maximal fluctuation, the decision-maker
can achieve an optimal value of maximal fluctuation equal
to three, accepting a 1.96% degradation in the expenses.
To illustrate the results and show how the model would
assist program managers when planning and scheduling a
construction program, the solutions of the third phase
(maximizing labour stability) were displayed in several
figures. Figure 2 shows the optimal timing of the projects
when the model minimizes the maximal labour fluctuation
(3). For instance, Project 1 should start in time period 5
under mode 2 and will be finished in time period 17, while
Project 2 should start in time period 7 under mode 1 and
will be finished in time period 19. Note that the completion
time of the latest project in the schedule (Project 7) is time
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
p1
p2
p3
p4
p5
p6
p7
p8
p9p10
ProjectTime period
Figure 3 Schedule for the third phase (sum of fluctuations).
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7 8 9 101112131415161718192021222324252627282930313233343536
Use
Periods
Figure 4 Crane usage in the optimal schedule.
1176 Journal of the Operational Research Society Vol. 64, No. 8

period 31. Thus, starting in time period 4 (Project 9) all the
projects are completed by time period 31. As shown in
Figure 2, the model only allows go-no-go decisions, that is,
projects cannot be partially funded and once they are in
progress are not interrupted.
Figure 3 shows the optimal timing of the projects when
the model minimizes the sum of fluctuations (4). Note that
the completion time of the latest project in the schedule
(Project 7) is time period 31. However, comparing this
schedule with that shown in Figure 2, the program starts in
time period 1 (Project 1). In other words, when minimizing
the sum of fluctuations, the program is extended in three
periods of time compared with the program when
minimizing the maximal labour fluctuation.
The optimal timing of the projects is also solved for
the case there are no multi-skilled workers available. When
the model minimizes the maximal labour fluctuation, the
solution is that the total completion time is 33 time periods.
This solution accounts for a total expense across the
projects of USD 9530, a maximal labour fluctuation of 4,
and a sum of fluctuations of 52. Under the same conditions
(no multi-skilled workers), when the model minimizes the
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Skill 1 Skill 2 Skill 3
WorkerPeriods
Figure 5 Report per worker (maximal fluctuation).
L Florez et al—Sustainable workforce scheduling in construction program management 1177
sum of fluctuations, the total completion time of the
projects is 33 time periods. This solution accounts for a total
expense of USD 9516, a maximal labour fluctuation of 12,
and a sum of fluctuations of 40. For both cases, when using
single-skilled workers, the program is extended in two
periods compared with the program when using multi-
skilled workers. Furthermore, the maximal fluctuation and
the sum of fluctuations increase by 33.3 per cent and 14.3
per cent, respectively. As can be seen from above, the use of
multi-skilled workers minimizes the number of fires, reduces
the completion time, and allows the program manager to
maintain a stable workforce along the planning horizon.
Figure 4 illustrates the use of cranes under the opti-
mal solution for the first alternative in the third phase,
minimizing the maximal fluctuation. The crane utilization
helps determine the level of usage of this resource and
whether there is a shortage or excess. This result may be used
to hire additional resources or readjust the initial budget.
Figure 5 illustrates the working pattern for each worker
when the objective is to minimize the maximal fluctuation.
For instance, worker 2 is hired at the beginning of time
period 5 and uses skill 1 until time period 36. Note that
worker 2 is not fired and works until the end of the planning
horizon. Worker 2 is a single skilled worker, so it does not
shift skills and just uses skill 1. On the other hand, worker 5
is a multi-skilled worker, qualified in skill 1, skill 2, and skill
3. Worker 5 is hired at the beginning of time period 4 and
uses skill 2, works with skill 2 until he/she is shifted in time
period 13 to use skill 3. In time period 17, he/she shifts again
0123456789
101112131415161718192021222324252627
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
Number of workers
1 skill 2 skills 3 skills
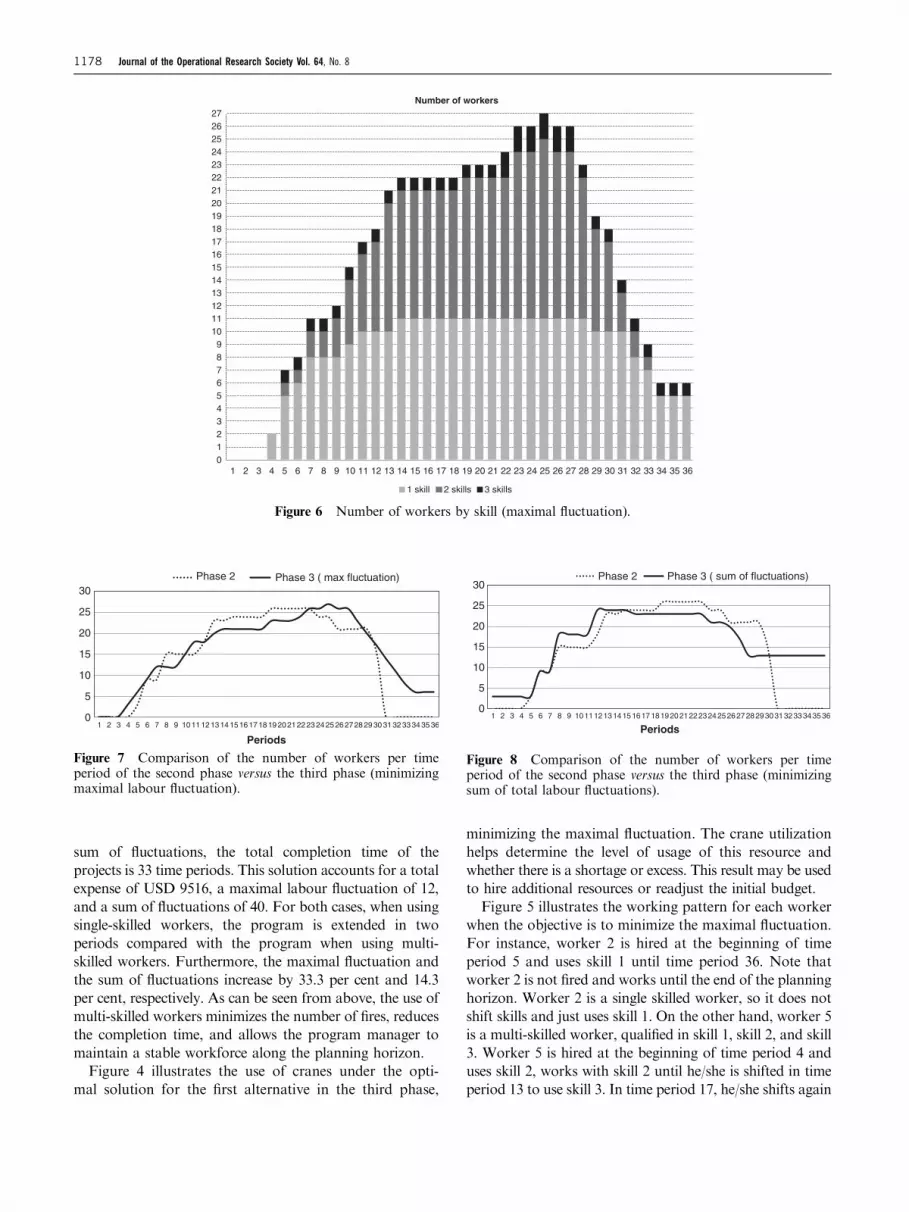
Figure 6 Number of workers by skill (maximal fluctuation).
0
5
10
15
20
25
30
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
Periods
Phase 2 Phase 3 ( max fluctuation)
Figure 7 Comparison of the number of workers per timeperiod of the second phase versus the third phase (minimizingmaximal labour fluctuation).
0
5
10
15
20
25
30
1 2 3 4 5 6 7 8 9 101112131415161718192021222324252627282930313233343536
Periods
Phase 2 Phase 3 ( sum of fluctuations)
Figure 8 Comparison of the number of workers per timeperiod of the second phase versus the third phase (minimizingsum of total labour fluctuations).
1178 Journal of the Operational Research Society Vol. 64, No. 8

to skill 2 and works until time period 36, when he/she is
fired. Note that although worker 5 is qualified in three skills,
he/she only uses two skills. Also, note that the report shows
when a worker is hired, fired, and shifted and the time
periods when each worker uses a skill. Workers 4, 12, and 29
are not hired during the planning horizon.
Figure 6 illustrates the number of workers by skill when
minimizing the maximal labour fluctuation. For instance,
in time period 15, the program uses 22 workers. That is, 11
single-skilled workers (50%), 10 multi-skilled workers with
two skills (45%), and one multi-skilled worker with three
skills (5%).
Figure 7 graphically compares the number of workers
per time period of the second and third phase (maximal
labour fluctuation). In the second phase, the projects were
scheduled to minimize cost and time, resulting in a maximal
labour fluctuation of 15 workers. The fluctuation of 15 is the
result of firing 15 workers in time period 31 as shown in
Figure 7. In the third phase (maximal labour fluctuation),
the solution is a maximal change of three workers between
any pair of consecutive time periods. Note that the slope is
equal to 3 between time periods 4 through 7 and time
periods 27 through 31. That is, three workers are hired in
time periods 5–7 and three workers are fired in time periods
28–31. Also, note that in phase 2 all workers are fired after
the last project is completed (time period 31), while in phase
3 some workers are kept until the end of the planning
horizon (time period 36). The difference between the costs
of fire (USD 15) and wage (USD 8) for a worker led to the
results shown in Figure 7.
Similarly, Figure 8 graphically compares the number of
workers per time period of the second and third phase (sum
of fluctuations). In the second phase, the projects were
scheduled to minimize cost and time, resulting in 52
fluctuations. This is the result of 52 hiring and firing events.
In the third phase (sum of fluctuations), the solution is
35 fluctuations. Note that in this alternative, a total of 13
workers are kept at the end of the planning horizon (time
period 36). As shown in Figure 7, the objective of mini-
mizing the maximal labour fluctuation resulted in a total
of 21 fires and six workers at the end of the planning
horizon (period 36). On the other hand, the objective of
minimizing the sum of fluctuations resulted in 11 fires
and 13 workers at the end of the planning horizon, as
shown in Figure 8. This trade-off between number of
fires and number of workers allows decision-makers to
consider their preferences and identify which solution
best suits their needs.
Finally, Figure 9 graphically compares the compro-
mise solution at the end of phase 3 with those of phase
1 and phase 2 where each criterion is optimized in
isolation. Each radial axis represents a single criterion
and each point reflects the percentage of the best
possible value achieved at each phase. Note that for
the completion time and total cost, the compromise
solution obtained in the three phases is close to 100%.
The solution to maximal fluctuation comprises the sum
of fluctuations by 137% of the best value while the
solution to sum of fluctuations comprises the maximal
fluctuation by 300% of the best value.
The solution process for the three phases using single-
skilled workers took 52 s (in average), while the solution
using multi-skilled workers took about 10.5min (in average).
The experiments in this section were performed on a Lenovo
X201 Tablet with 4GB of RAM, Intel Core i7 running at
1.729GHz (with 2 cores), on a 64-bit Microsoft Windows 7
Enterprise Edition operating system. The algorithm was
implemented in Mosel version 3.2.2 and the mixed-integer
optimization models were solved using Xpress-MP Optimi-
zer version 22.01.04.
0%
100%
200%
300%
400%
500%
Phase 1 Phase 2
Phase 3 (max fluctuation) Phase 3 (sum of fluctuations)
Sumof fluctuations
Completion time
Total expense
Maximal fluctuation
Figure 9 Comparison of the compromise solution at the end of phase 3 versus the solutions to phase 1 and phase 2.
L Florez et al—Sustainable workforce scheduling in construction program management 1179

Conclusions and future work
The project scheduling problem in construction has been
tackled in the literature using several methods. These
methods have considered evaluation criteria such as time,
cost, and quality to develop optimal schedules for
construction projects. However, the construction industry
is moving towards sustainability, requiring projects to
additionally include sustainable factors. Social sustainabil-
ity is one of such factors.
To measure the social sustainability performance of
project scheduling, we propose a new indicator denoted
labour stability. We proposed two alternatives to model
labour stability. The first alternative minimizes the max-
imal fluctuation of workers, whereas the second alternative
minimizes the sum of the fluctuations. By maximizing
labour stability, the objective is to increase the extent of use
of workers in the jobsite and job continuity.
A multiobjective mixed-integer programming model was
developed to allocate workers and schedule projects. We
illustrated the application of the model in a case study of a
construction program of 10 projects. The decision-makers
were able not only to determine the optimal starting times
for each of the projects, but also to identify working pat-
terns for each of the workers, usage levels of the machines,
and investment and labour costs.
The proposed solution strategy included three phases
that allow the decision-maker to include his/her preferences
and reveal trade-offs between objectives. In the first phase,
projects were scheduled with the objective of minimizing
completion time. Then, in the second phase, the objective
was to minimize cost without allowing deterioration of the
optimal completion time attained in the first phase. Finally,
in the third phase, the objective was to maximize labour
stability, allowing some deterioration in the time and cost
objectives.
The development of optimal schedules while considering
social sustainable practices contributes to determining
actions and formulating strategies to prevent social burdens
in an attempt to make program management more
sustainable. Following this study, the idea is to formulate
a more holistic set of sustainability performance indicators
that cover other social aspects as well as the environmental
dimensions. By doing so, a wider scope of goals can be
achieved, including those beyond social sustainability.
References
Adrian JJ (1987). Construction Productivity Improvement. Elsevier:New York.
Alves MJ and Clımaco J (2007). A review of interactive methodsfor multiobjective integer and mixed-integer programming.European Journal of Operational Research 180(1): 99–115.
Alwaer H and Clements-Croome DJ (2010). Key performanceindicators (KPIs) and priority setting using the multi-attributeapproach for assessing sustainable intelligent buildings. Buildingand Environment 45(4): 799–807.
Belout A (1998). Effects of human resource management on projecteffectiveness and success: Toward a new conceptual framework.International Journal of Project Management 16(1): 21–26.
Burleson RC, Haas CT, Tucker RL and Stanley A (1998).Multiskilled labor utilization strategies in construction. Journalof Construction Engineering and Management 124(6): 480–489.
Chankong V and Haimes YY (1983). Multiobjective DecisionMaking: Theory and Methodology. North-Holland: New York.
El-Rayes K and Moselhi O (2001). Optimizing resource utilizationfor repetitive construction projects. Journal of ConstructionEngineering and Management 127(1): 18–27.
Fernandez-Sanchez G and Rodriguez-Lopez F (2010). A metho-dology to identify sustainability indicators in constructionproject management—Application to infrastructure projects inSpain. Ecological Indicators 10(6): 1193–1201.
Gomar JE, Haas CT and Morton DP (2002). Assignment andallocation optimization of partially multiskilled workforce.Journal of Construction Engineering and Management 128(2):103–109.
Hartmann S (2001). Project scheduling with multiple modes: Agenetic algorithm. Annals of Operations Research 102(1–4):111–135.
Hartmann S and Briskorn D (2010). A survey of variants andextensions of the resource-constrained project scheduling pro-blem. European Journal of Operational Research 207(1): 1–14.
Hyari K, El-Mashaleh M and Kandil A (2010). Optimal assign-ment of multiskilled labor in building construction projects.International Journal of Construction Education and Research6(1): 70–80.
Jaskowski P and Sobotka A (2006). Scheduling constructionprojects using evolutionary algorithm. Journal of ConstructionEngineering and Management 132(8): 861–870.
Jun HJ and El-Rayes K (2010). Optimizing the utilization ofmultiple labor shifts in construction projects. Automation inConstruction 19(2): 109–119.
Labuschagne C, Brent AC and Van Erck RPG (2005). Assessingthe sustainability performances of industries. Journal of CleanerProduction 13(1): 373–385.
Li RKY and Willis RJ (1993). Resource constrained schedulingwithin fixed project durations. Journal of the OperationalResearch Society 44(1): 71–80.
Lill I (2008). Sustainable management of construction labour. In:Zavadskas EK, Kaklauskas A and Skibniewski MJ (eds).Proceedings of the 25th International Symposium on Automationand Robotics in Construction ISARC-2008, Vilnius Lithuania,Vilnius: Technika, pp 864–875.
Lingard H and Sublet A (2002). The impact of job andorganisational demands on marital or relationship satisfactionand conflict among Australian civil engineers. ConstructionManagement and Economics 20(6): 507–521.
Loosemore M, Dainty A and Lingard H (2003). Human ResourceManagement in Construction Projects: Strategies and OperationalApproaches. Spon Press: London.
MacKenzie S, Kilpatrick AR and Akintoye A (2010). UKconstruction skills shortage response strategies and an analysisof industry perceptions. Construction Management and Economics18(7): 853–862.
Medaglia AL, Hueth D, Mendieta JC and Sefair JA (2008).A multiobjective model for the selection and timing of publicenterprise projects. Socio-Economic Planning Sciences 42(1):31–45.
1180 Journal of the Operational Research Society Vol. 64, No. 8

Palacio JD (2010). On the multi-mode resource-constrained projectscheduling problem with minimum and maximum time lags(MRCPSP/max) via mixed-integer programming. MSc Thesis(in Spanish), Universidad de los Andes.
Pinedo ML (2005). Planning and Scheduling in Manufacturing andServices. Springer: New York.
Ramos TB and Caeiro S (2010). Meta-performance evalua-tion of sustainability indicators. Ecological Indicators 10(2):157–166.
Reiss G (1996). Programme Management Demystified: ManagingMultiple Projects Successfully. E & F Spon: London.
RSMeans (2012). RSMeans reed construction data. http://rsmeans.reedconstructiondata.com/, accessed on 23 March 2012.
Sefair JA, Molano A, Medaglia AL and Sarmiento OL(2011). Locating neighborhood parks with a lexicographicmulti-objective optimization method. In: Michael PJ (ed).Community-Based Operations Research: Decision Modelingfor Local Impact and Diverse Populations. International Seriesin Operations Research & Management Science, Springer:New York, Vol. 167, Part 2, pp 143–171.
Singh RK, Murty HR, Gupta SK and Dikshit AK (2007).Development of composite sustainability performance indexfor steel industry. Ecological Indicators 7(2): 565–588.
Singh RK, Murty HR, Gupta SK and Dikshit AK (2009). Anoverview of sustainability assessment methodologies. EcologicalIndicators 9(2): 189–212.
Sprecher A and Drexl A (1998). Multi-mode resource-constrainedproject scheduling by a simple, general and powerful sequencingalgorithm. European Journal of Operational Research 107(2):431–450.
Srour IM, Haas CT and Morton DP (2006). Linear programmingapproach to optimize strategic investment in the constructionworkforce. Journal of Construction Engineering and Management132(11): 1158–1166.
Steuer R (1989). Multiple Criteria Optimization: Theory, Computa-tion and Application. Krieger: Malabar, FL.
Tahir AC and Darton RC (2010). The process analysis method ofselecting indicators to quantify the sustainability performance ofa business operation. Journal of Cleaner Production 18(16–17):1598–1607.
Ugwu OO and Haupt TC (2005). Key performance indicators forinfrastructure sustainability—A comparative study betweenHong Kong and South Africa. Journal of Engineering, Designand Technology 3(1): 30–43.
Villegas JG, Palacios F and Medaglia AL (2006). Solution methodsfor the bi-objective (cost-coverage) unconstrained facility loca-tion problem with an illustrative example. Annals of OperationsResearch 147(1): 109–141.
Wongwai N and Malaikrisanachalee S (2011). Augmented heuristicalgorithm for multi-skilled resource scheduling. Automation inConstruction 20(4): 429–445.
Zhang H, Tam CM and Li H (2006). Multimode project schedulingbased on particle swarm optimization. Computer-Aided Civil andInfrastructure Engineering 21(2): 93–103.
Zhu G, Bard JF and Yu G (2005). Disruption managementfor resource-constrained project scheduling. Journal of theOperational Research Society 56(4): 365–381.
Received April 2012;accepted November 2012 after one revision
L Florez et al—Sustainable workforce scheduling in construction program management 1181