state-dependent pricing for real-time freeway management: anticipatory versus reactive strategies
TRANSCRIPT
Transportation Research Part C 19 (2011) 644–657
Contents lists available at ScienceDirect
Transportation Research Part C
journal homepage: www.elsevier .com/locate / t rc
State-dependent pricing for real-time freeway management: Anticipatoryversus reactive strategies
Jing Dong a,1, Hani S. Mahmassani a,⇑, Sevgi Erdogan b, Chung-Cheng Lu c
a Transportation Center, Northwestern University, 600 Foster Street, Evanston, IL 60208, USAb Department of Civil & Environmental Engineering, University of Maryland, 1173 Glenn L. Martin Hall, College Park, MD 20742, USAc Graduate Institute of Information and Logistics Management, National Taipei University of Technology, 1 Section 3, Chung-Hsiao East Road, Taipei 106, Taiwan
a r t i c l e i n f o a b s t r a c t
Article history:Received 25 June 2008Received in revised form 12 August 2010Accepted 11 October 2010
Keywords:Dynamic pricingManaged lanesToll lanesFreeway corridor managementAnticipatory congestion pricingReactive congestion pricingPredictive strategiesLane controlDynamic traffic assignment
0968-090X/$ - see front matter � 2010 Elsevier Ltddoi:10.1016/j.trc.2010.10.001
⇑ Corresponding author. Tel.: +1 847 491 7287; faE-mail addresses: [email protected] (J. D
gmail.com (C.-C. Lu).1 Tel.: +1 847 491 7287; fax: +1 847 491 3090.
This paper proposes the notion of anticipatory (dynamic) pricing, and investigates theadvantages of using predicted traffic conditions over the use of prevailing and/or historicalconditions in setting time-varying link tolls along a freeway corridor to maintain targetlevel of service (LOS) and avoid traffic breakdown on toll links. This is accomplishedthrough an anticipatory toll generator intended to operate in tandem with a real-time traf-fic estimation and prediction system.
Using a calibrated network model of the Baltimore – Washington, DC corridor as test bed,simulation experiments are performed to compare the proposed anticipatory pricing strat-egies to reactive as well as static pricing schemes. The results indicate that setting prices onthe basis of predicted conditions can make a substantial difference in terms of achievingthe objectives of pricing in managed-lane situations.
� 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Road pricing, such as road tolls and cordon (area) tolls, is increasingly considered as an effective demand managementstrategy to reduce traffic congestion and improve system performance during peak periods in many metropolitan areas.In particular, several value pricing applications (e.g. I-15 in San Diego, I-394 in Minnesota and SR-167 in Seattle) that allowusers to choose between two adjacent roadways – one tolled but free-flowing, and another free but congested (Small andYan, 2001) – have been deployed in the United States. These programs apply dynamic pricing strategies, using real-timeinformation collected from loop detectors. For example, in the MnPASS lanes on I-394, tolls are adjusted, as frequently asevery three minutes, based on the spacing of vehicles. Specifically, when roadway sensors detect platoons of vehicles, it isassumed that a drop in average speed has occurred or will soon occur. The rate is accordingly adjusted upward to discouragethe usage of the toll lanes. Similarly, the I-15 pilot program determines toll values by comparing aggregated volumes (on thetolled facility) obtained from two observation intervals against volume thresholds prescribed in a look-up table. The tolls arethen displayed on variable message signs. An evaluation study of this pilot dynamic and state-dependent pricing applicationfor the US Department of Transportation has concluded that it was successful (Perez et al., 2003). Recognizing that these
. All rights reserved.
x: +1 847 491 3090.ong), [email protected] (H.S. Mahmassani), [email protected] (S. Erdogan), jasoncclu@

J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 645
tolled facilities’ success depends on their ability to provide time savings and reliable travel times, the present study aims atdeveloping a systematic approach (pricing strategy) for efficiently determining time-varying and state-dependent tolls so asto maintain high level of service (LOS) on toll lanes.
Although freeways were initially intended to provide uninterrupted high LOS to travelers, experience in metropolitanareas indicates that they frequently fail to provide the desired service quality because of recurrent and/or nonrecurrent con-gestion. Various freeway control measures, such as ramp metering, lane use control, traveler information and guidance sys-tems have been developed to reduce congestion and prevent/delay the onset of breakdown (Papageorgiou et al., 2003).However, imposing tolls on designated lanes has only recently been viewed as a possible control, with objectives similarto those of control methods, such as increasing efficiency (or reducing travel time), reliability, mobility, and throughput. Thismotivates the present study, where dynamic pricing is used as a control method to maintain high LOS on designated lanes,with the purpose of managing demand for toll lanes by setting the toll values effectively to provide uninterrupted flowconditions.
Given the non-linear dynamic properties of traffic flow, and the instabilities associated with flow levels approaching nom-inal capacity levels, achieving the desired control objectives through dynamic prices poses several challenges. Current oper-ation, which reacts to measured flow levels, may result in prices that are ‘‘too little, too late”—no matter how high they areset, flow breakdown may have already occurred, resulting in stop-and-go conditions. This means that customers who havemay have paid the maximum allowed toll charges may in fact be experiencing unacceptably poor traffic conditions—withhigh and highly unreliable travel times. Furthermore, users may not respond to the prices in exactly the intended manner—especially because their response may not depend only on conditions prevailing on the tolled lane, but rather on the differ-ential with the free lanes. This may result in fluctuations in the demand level for the tolled facility that could further exac-erbate flow instabilities. The principal challenge is to set the price at a sufficiently high level before, and not after the onset ofcongestion/breakdown. In fact the proactive (anticipatory) measure has been introduced and proves to be more effectivethan reactive measure in travel information provision (e.g. Dong et al. 2006), ramp metering (e.g. Paesani et al., 1997),and some fields of business management (e.g. Schweitzer, 2004) as it could avert a crisis as opposed to repair its damage.Therefore the application of proactive management in dynamic pricing calls for the use of prediction in conjunction withsensor measurements in setting prices, resulting in anticipatory pricing strategies.
To set prices as a control, we adapt logic similar to ramp-metering control strategies. Reactive ramp-metering strategies,such as ALINEA (Asservissement Linéaire d’Entrée Autoroutière), have been used at a tactical level to keep freeway trafficconditions close to target values, based on traffic measurements (Papageorgiou et al., 1991). ALINEA is a closed-loopramp-metering strategy aimed at maintaining maximum throughput in the mainline. It is relatively simple to apply, buthas been shown to be quite effective in several field applications (Papageorgiou et al., 1991, 1997) and simulation-basedevaluation studies (Papageorgiou et al., 1997; Chu et al., 2004). Several variations of ALINEA have been proposed to addressspecific issues and requirements not covered by the initial implementations of the logic (Smaragdis and Papageorgiou, 2003).On the other hand, anticipatory ramp metering schemes have also been designed for real-time application. As noted, therationale of anticipatory control strategies is to prevent traffic breakdown before it occurs, by relying on predicted trafficconditions. For example, System Wide Adaptive Ramp Metering algorithm (SWARM) used linear regression and Kalman fil-tering processes to forecast system evolution (Paesani et al., 1997); Advanced Real-time Ramp Metering System (ARMS) em-ployed an optimal self-learning congestion predictor based on pattern recognition technique to predict short-termbreakdown (Liu et al., 1994). Bellemans et al. (2004) proposed a macroscopic simulation program, METANET (Messmerand Papageorgiou, 1990), as a prediction model. Although comparable performance was reported in the test results of ALIN-EA and SWARM algorithms, potential benefits of the anticipatory ramp metering schemes were expected to be greater whentraffic predictions are accurate (Zhang et al., 2001).
Inspired by the logic of the above ramp-metering control methods, this study proposes and compares dynamic link pric-ing strategies which determine link tolls based on prevailing measures and anticipatory measures. Prevailing measures de-pict current network conditions (or so-called instantaneous conditions). Anticipatory measures are derived from on-lineforecasts of future network states. In the proposed methods, the differences between link concentrations (or alternatively,occupancies) and a given set of target concentrations (occupancies) on toll links are obtained, and then link tolls are deter-mined as a function of these differences (given some control parameters). Under a reactive strategy, the link tolls are basedexclusively on link concentrations extracted from prevailing network states. On the other hand, the strategy is anticipatorywhen the link tolls are determined using predicted link concentrations. As explained, a potential drawback of using prevail-ing traffic measures for setting prices (i.e. reactive pricing) is that network conditions may change significantly during thetime that drivers who pay that toll are actually traveling, resulting in experienced service levels that are not appropriatefor the price charged. More important, once breakdown occurs, significant and often irretrievable loss of throughput is expe-rienced at a time when potential demand is highest.
Alternatively, the anticipatory pricing strategy proposed in this paper builds on recent research findings on advancedtraveler information systems (ATIS), which showed the effectiveness of using a real-time simulation-based traffic estimationand prediction system to provide anticipatory travel time information, compared to prevailing travel time information(Mahmassani et al., 2005b; Dong et al., 2006). The conceptual basis for anticipatory information provision was articulatedby Kaysi (1992), before developments in real-time traffic estimation and prediction enabled actual application of this con-cept. When the predictions are accurate or within an acceptable range, anticipatory measures are generally expected to bemore effective than the prevailing measures because they can account for the rapid changes in traffic conditions spatially and

646 J. Dong et al. / Transportation Research Part C 19 (2011) 644–657
temporally, and are as such based on the traffic conditions predicted to prevail at the time the trip-maker reaches a partic-ular location. One of the main contributions of this paper is to investigate the potential effectiveness of utilizing predictedtraffic measures in setting the toll values in order to prevent breakdown on toll lanes before it occurs.
This paper investigates and compares the performance of two different dynamic pricing strategies, namely reactive andanticipatory, applied in a freeway corridor to maintain a target level of service on toll links. A third strategy, for static pricing,is used as a benchmark. The design of the link toll generators is similar to the logic of local ramp-metering control methods.To examine and compare the performance of static, reactive and anticipatory link pricing strategies, the toll generator isembedded in a real-time traffic estimation and prediction system (TrEPS), which continually publishes prevailing and pre-dicted link concentrations. Road users’ route choices in response to toll charges are taken into account through the mecha-nism, based on bounded-rationality, embedded in the user behavior component of the network state estimation/predictionmodule in TrEPS. The Baltimore – Washington, DC corridor network is used as the test bed network with two lanes of theI-95 southbound converted to be the toll lanes. A series of simulation experiments is conducted and results are analyzed.
The paper is organized as follows. First, the second-best pricing problem of interest is defined. In the third section, themethodologies used to implement the dynamic pricing strategies (or link toll generators) are described, followed by theexperimental design and the simulation results. Finally, concluding remarks and discussion of possible future research arestated.
2. Problem statement
The following notation is used to represent the variables and parameters in this paper.
N
set of nodes in the network (–) A set of directed links (i, j), " i 2 N, j 2 N in the network (–) Td planning horizon in terms of time intervals (min) pmin(l) minimum toll on link l (USD) pmax(l) maximum toll on link l (USD) m number of links in the network (–) m0 number of links that can be tolled for a certain amount within the range of [pmin(l), pmax(l)] (–) p(l, t) toll value (price) charged for traveling on link l during time interval t (USD) ~pðl; tÞ anticipatory toll for traveling on link l during time interval t (USD) P(t) vector of link tolls during time interval t, consisting of p(l, t), l = 1, . . ., m0 (–) ~PðtÞ vector of predictive link tolls for time interval t, consisting of ~pðl; tÞ, l = 1, . . ., m0 (–) P vector of static link tolls, consisting of p(l), l = 1, . . ., m0c(l, t)
traffic concentration on link l at time interval t (vpmpl) ~cðl; tÞ predicted traffic concentration on link l during time interval t (vpmpl) C(t) vector of link concentrations at time interval t, consisting of c(l, t), l = 1, . . ., m0 (–) ~CðtÞ vector of predicted link concentrations in time interval t, consisting of ~cðl; tÞ, l = 1, . . ., m0 (–) �cðlÞ historical traffic concentration on link l averaged over the peak period (vpmpl) �C vector of average link concentration, consisting of �cðlÞ, l = 1, . . ., m0 (–) cðlÞ preset target (nominal) concentration for link l (vpmpl) a control factor (a parameter) (USD/vpmpl) r prediction horizon in terms of number of time intervals (min) v(l) speed on link l (mph) vf(l) speed-intercept (mph) uf(l) free-flow speed on link l (mph) v0(l) minimum speed on link l (mph) cjam(l) jam density on link l (vpmpl) aVOT value of time (USD/min)This problem considers a traffic network G = (N, A). The entire period of interest (planning horizon) is discretized into smalldeparture time intervals t = 1, 2, . . ., Td during which no perceptible changes in traffic conditions occur. The time-dependentOD trip desires for the planning horizon are known a priori. Further, a subset of links subject to tolls (i.e. toll links) in thenetwork, A
0, A
0# A, is given. A feasible continuous range of toll values for link l," l 2 A
0is defined as [pmin, pmax]. A constant
value of time (VOT) is assumed for all users in the network, though user heterogeneity in VOT could be addressed byadapting the approach recently proposed by Lu et al. (2008). Given a set of preset target concentrations cðlÞ on toll links,the problem is to find a vector of time dependent link toll values P(t) (or P in the static case), so as to maintain high levelof service on the toll links. Since only a subset of links is subject to pricing, the problem is considered as a second-best pricingproblem.
J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 647
3. Methodology
This section describes the theoretical rationale and simulation-based approaches for the dynamic pricing problem. Twodynamic pricing strategies are presented, namely reactive and anticipatory, for maintaining high LOS on toll lanes, in addi-tion to the static strategy used as a benchmark in the comparison. The three strategies are implemented and evaluated in asimulation–assignment based real-time traffic estimation and prediction system (TrEPS), described following the strategies.
3.1. A theoretical analysis on a two-route network
In previous studies, static second best price has been solved analytically and represented in a closed form for a simplifiedtwo-route network (e.g., Verhoef, 2002). As explained, this research is intended to solve for dynamic second best prices. Con-sider a simplified two-route network: one toll road, one alternative road. Without loss of generality, assume both routes havethe same attributes. Time-varying travel demand is assigned to the network, which causes congestion (or, demand exceedscapacity) on one or both routes. Therefore, a set of time-varying prices is derived to maintain free-flowing condition (or someminimum level of service expressed in terms of speed, maximum density or flow) on the toll road as well as minimize totaltravel time. As there are only two alternative routes in this special case, the target flow assignment can be derived easily:when demand is low, traffic is distributed equally to maintain free-flow conditions on both routes; when demand increases,assign the maximum allowed flow (beyond which the service level would degrade below the target level) to toll road and therest of the flow to the alternative road. In order to achieve the target flow assignment, time-varying tolls need to satisfy thefollowing equilibrium condition, for each departure time interval t = 1, 2, . . ., Td:
T2ðtÞ ¼ T1ðtÞ þ1
aVOT� pðtÞ ð1Þ
Assume a closed form representation of travel time as a function of flow rate (i.e. link performance function). Given thetarget flow assignment, the optimal dynamic tolls can be obtained as follows:
pðtÞ ¼ aVOT � ðT2ðtÞ � T1ðtÞÞ ð2Þ
The result cannot be readily extended to a general network, because of the simplified topology considered here, with onlyone alternative to the toll road, and the simplistic flow-travel time relation. In addition, complete knowledge of demand var-iation is assumed to known a priori. Nonetheless, this example offers two important insights for developing practical dy-namic pricing methodologies. First, as shown in Eq. (2), the dynamic prices can be determined based on traffic conditionson the toll road and the alternative road under the target assignment. However, noting that T1ðtÞ can be obtained as a func-tion of the target flow q�ðtÞ assigned to the toll road, and T2ðtÞ can be obtained as a function of the target flow assignment½QðtÞ � q�ðtÞ�, where QðtÞ is the known total O–D demand, it becomes clear that the dynamic price depends primarily on thetarget assignment to the toll road. This is reflected in the procedure for setting reactive and anticipatory prices as a functionof link concentration in the following sections. Second, the seemingly circularity that travel time at time t is an outcome ofimplementing current price but also determines the price at time t, motivates the development of an anticipatory pricingscheme, which evaluates the outcome (e.g. speed or concentration at time t) of the proposed price through prediction inan attempt to resolve the circularity.
3.2. Reactive pricing strategy
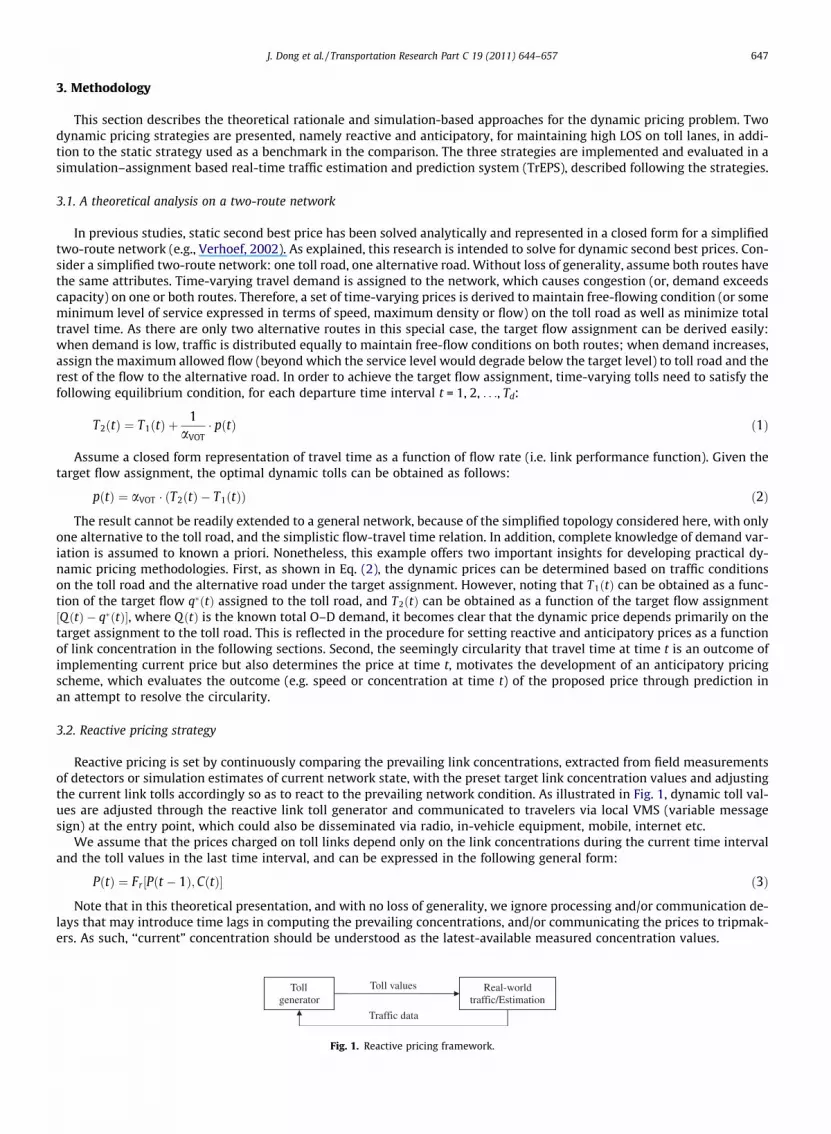
Reactive pricing is set by continuously comparing the prevailing link concentrations, extracted from field measurementsof detectors or simulation estimates of current network state, with the preset target link concentration values and adjustingthe current link tolls accordingly so as to react to the prevailing network condition. As illustrated in Fig. 1, dynamic toll val-ues are adjusted through the reactive link toll generator and communicated to travelers via local VMS (variable messagesign) at the entry point, which could also be disseminated via radio, in-vehicle equipment, mobile, internet etc.
We assume that the prices charged on toll links depend only on the link concentrations during the current time intervaland the toll values in the last time interval, and can be expressed in the following general form:
PðtÞ ¼ Fr ½Pðt � 1Þ;CðtÞ� ð3Þ
Note that in this theoretical presentation, and with no loss of generality, we ignore processing and/or communication de-lays that may introduce time lags in computing the prevailing concentrations, and/or communicating the prices to tripmak-ers. As such, ‘‘current” concentration should be understood as the latest-available measured concentration values.
Toll generator
Real-world traffic/Estimation
Toll values
Traffic data
Fig. 1. Reactive pricing framework.
648 J. Dong et al. / Transportation Research Part C 19 (2011) 644–657
As a variant on Eq. (3), the current toll value for each link could be determined based on the previous tolls and the currentconcentrations on all or several related links, e.g. upstream links, downstream links, parallel links on alternative routes andthe like. For simplicity, this study only considers a local toll generator, which assumes that the toll value on one link is inde-pendent of traffic states on other links. If the toll generator is assumed to be linear, a relatively simple closed-loop controlmechanism can be applied, shown in Eq. (4):
pðl; tÞ ¼ pðl; t � 1Þ þ a½cðl; tÞ � cðlÞ�; for l ¼ 1; . . . ;m0 ð4Þ
where a > 0 is a control parameter and the cðlÞ is the target concentration for link l, which is typically, but not necessarily setas cut-off concentration. In addition, the toll values are subject to a feasibility constraint pminðlÞ 6 pðl; tÞ 6 pmaxðlÞ. The tollgenerator uses current link concentration and adjusts the toll value according to the target concentration: raise the priceif the concentration exceeds the target value, lower the price otherwise. The model reacts smoothly even to slight differencesin concentration, and adjusts the current price based on the previous value.
Alternatively, an S-curve (e.g. a logistic function) may be considered for adjusting toll values in a non-linear fashion. Therationale is to react swiftly to changes in concentration around the target point, so as to pull the system back to the steadystate. The adjustment to the price follows this expression:
SðcÞ ¼ p1eaðc�cÞ
1þ eaðc�cÞ � p0 ð5Þ
where a, c, p0 and p1 are parameters. Specifically, a > 0 is a control parameter that determines the shape of the curve, c is thelocation parameter that could be set as the cut-off (or target) concentration, p0 is the offset value to set the price adjustmentto zero when the concentration reaches the target value and p1 is the multiplier to keep the adjustment within the preset tollvalue range in order to satisfy the feasibility constraint pminðlÞ 6 pðl; tÞ 6 pmaxðlÞ. Note that a is the only control factor in thenon-linear toll generator, while other parameters could be pre-determined based on the traffic flow model and pricingassumptions. The local non-linear toll generator is defined as follows:
pðl; tÞ ¼ pðl; t � 1Þ þ Sðcðl; tÞÞ; for l ¼ 1; . . . ;m0 ð6Þ
3.3. Anticipatory pricing strategy
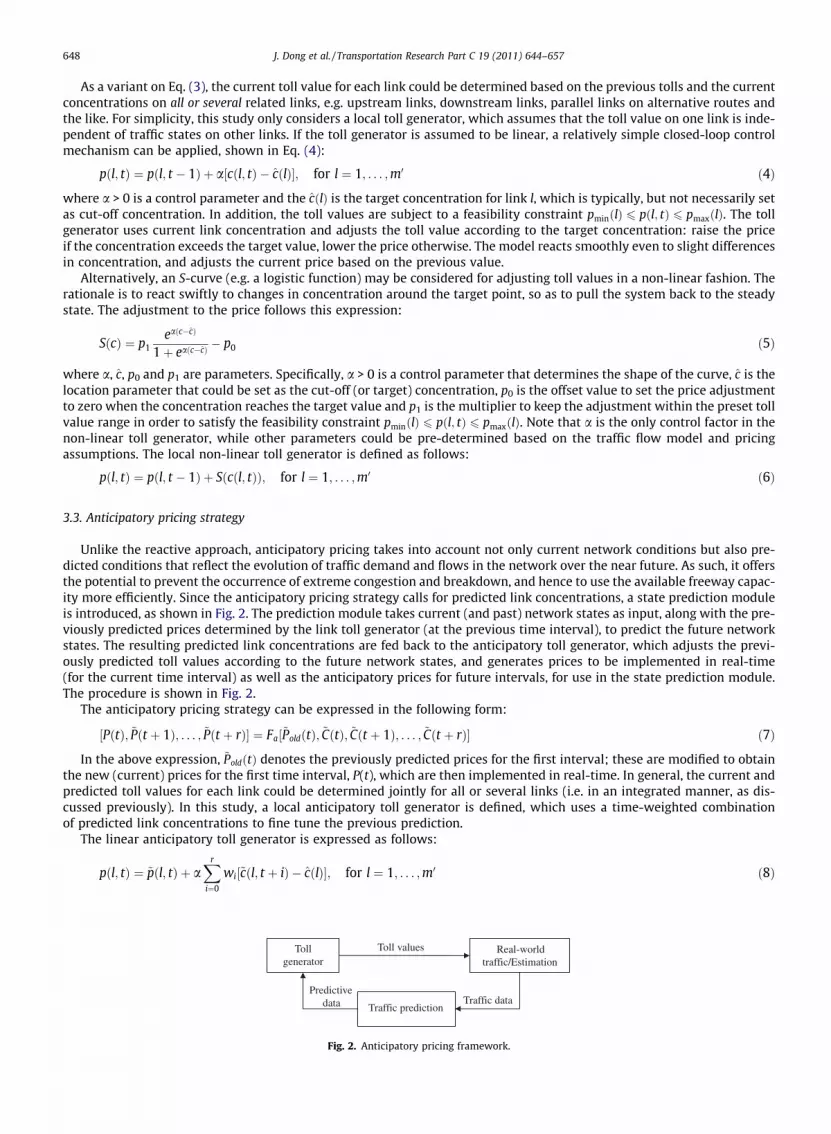
Unlike the reactive approach, anticipatory pricing takes into account not only current network conditions but also pre-dicted conditions that reflect the evolution of traffic demand and flows in the network over the near future. As such, it offersthe potential to prevent the occurrence of extreme congestion and breakdown, and hence to use the available freeway capac-ity more efficiently. Since the anticipatory pricing strategy calls for predicted link concentrations, a state prediction moduleis introduced, as shown in Fig. 2. The prediction module takes current (and past) network states as input, along with the pre-viously predicted prices determined by the link toll generator (at the previous time interval), to predict the future networkstates. The resulting predicted link concentrations are fed back to the anticipatory toll generator, which adjusts the previ-ously predicted toll values according to the future network states, and generates prices to be implemented in real-time(for the current time interval) as well as the anticipatory prices for future intervals, for use in the state prediction module.The procedure is shown in Fig. 2.
The anticipatory pricing strategy can be expressed in the following form:
½PðtÞ; ~Pðt þ 1Þ; . . . ; ~Pðt þ rÞ� ¼ Fa½~PoldðtÞ; ~CðtÞ; ~Cðt þ 1Þ; . . . ; ~Cðt þ rÞ� ð7Þ
In the above expression, ~PoldðtÞ denotes the previously predicted prices for the first interval; these are modified to obtainthe new (current) prices for the first time interval, P(t), which are then implemented in real-time. In general, the current andpredicted toll values for each link could be determined jointly for all or several links (i.e. in an integrated manner, as dis-cussed previously). In this study, a local anticipatory toll generator is defined, which uses a time-weighted combinationof predicted link concentrations to fine tune the previous prediction.
The linear anticipatory toll generator is expressed as follows:
pðl; tÞ ¼ ~pðl; tÞ þ aXr
i¼0
wi½~cðl; t þ iÞ � cðlÞ�; for l ¼ 1; . . . ;m0 ð8Þ
Toll generator
Real-world traffic/Estimation
Traffic prediction
Toll values
Traffic data Predictive
data
Fig. 2. Anticipatory pricing framework.
J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 649
where the weights (wi’s) decay exponentially over future prediction time intervals in the following fashion, wi = q � wi–1,i = 1, . . ., r and 0 < q < 1. The future anticipatory prices ~Pðt þ qÞ; q = 1, . . ., r are determined in a similar manner, albeit overa progressively shorter horizon, as follows:
~pðl; t þ qÞ ¼ ~poldðl; t þ qÞ þ aXr�q
i¼0
wi ~cðl; t þ qþ iÞ � cðlÞ½ �; for l ¼ 1; . . . ;m0; q ¼ 1; . . . ; r ð9Þ
where ~poldðl; t þ qÞ denotes the previous anticipatory price for the same interval.The non-linear toll generator for the anticipatory pricing strategy takes the following form, where the function S(.) is gi-
ven by Eq. (5):
pðl; tÞ ¼ ~pðl; tÞ þ SXr
i¼0
wi½~cðl; t þ iÞ � cðlÞ� !
; for l ¼ 1; . . . ;m0 ð10Þ
and
~pðl; t þ qÞ ¼ ~poldðl; t þ qÞ þ SXr�q
i¼0
wi½~cðl; t þ qþ iÞ � cðlÞ� !
; for l ¼ 1; . . . ;m0; q ¼ 1; . . . ; r ð11Þ
3.4. Static pricing strategy
The static pricing strategy sets fixed/flat link-specific tolls for a particular period of the day, typically derived off-linebased on average link concentrations, i.e. P ¼ Fs½�C�, and possibly other considerations. In this study, static pricing is usedfor benchmarking purposes, and is as such considered parametrically, with high and low values intended to illustrate therange of response behaviors. The approach assumes that the toll value on each link depends only on the concentration ofthat link, and the price-concentration relationship follows a linear function given in the following form:
pðlÞ ¼minfpmaxðlÞ;max½pminðlÞ;að�cðlÞ � cðlÞÞ�g; for l ¼ 1; . . . ;m0: ð12Þ
Hence, if the average concentration on link l exceeds the target concentration cðlÞ, a price up to pmax(l) is set proportionally tothe difference between cðlÞ and �cðlÞ, and pmin(l) is set otherwise.
3.5. Traffic estimation and prediction
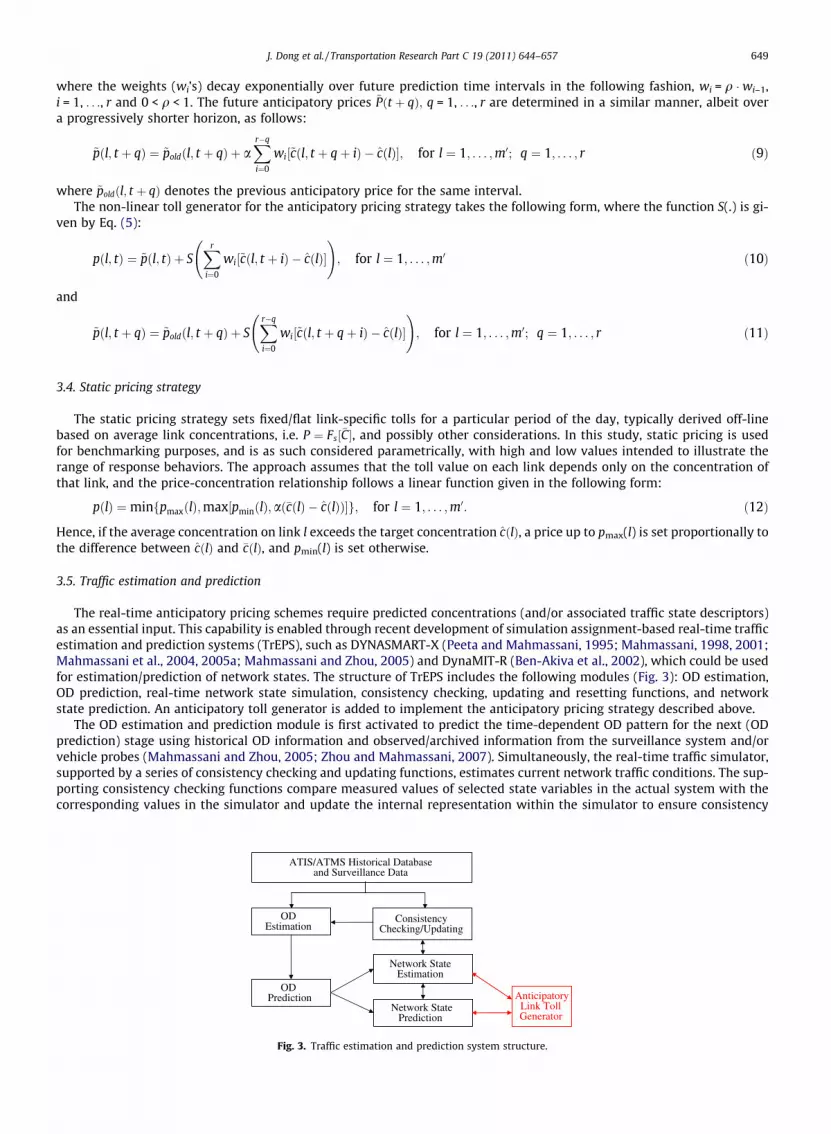
The real-time anticipatory pricing schemes require predicted concentrations (and/or associated traffic state descriptors)as an essential input. This capability is enabled through recent development of simulation assignment-based real-time trafficestimation and prediction systems (TrEPS), such as DYNASMART-X (Peeta and Mahmassani, 1995; Mahmassani, 1998, 2001;Mahmassani et al., 2004, 2005a; Mahmassani and Zhou, 2005) and DynaMIT-R (Ben-Akiva et al., 2002), which could be usedfor estimation/prediction of network states. The structure of TrEPS includes the following modules (Fig. 3): OD estimation,OD prediction, real-time network state simulation, consistency checking, updating and resetting functions, and networkstate prediction. An anticipatory toll generator is added to implement the anticipatory pricing strategy described above.
The OD estimation and prediction module is first activated to predict the time-dependent OD pattern for the next (ODprediction) stage using historical OD information and observed/archived information from the surveillance system and/orvehicle probes (Mahmassani and Zhou, 2005; Zhou and Mahmassani, 2007). Simultaneously, the real-time traffic simulator,supported by a series of consistency checking and updating functions, estimates current network traffic conditions. The sup-porting consistency checking functions compare measured values of selected state variables in the actual system with thecorresponding values in the simulator and update the internal representation within the simulator to ensure consistency
ATIS/ATMS Historical Database and Surveillance Data
OD Estimation
OD Prediction
Network State Prediction
Network State Estimation
Consistency Checking/Updating
Anticipatory Link Toll Generator
Fig. 3. Traffic estimation and prediction system structure.
650 J. Dong et al. / Transportation Research Part C 19 (2011) 644–657
with actual conditions (Doan et al., 1999; Zhou and Mahmassani, 2005). At the start of each state prediction stage, the pre-dictor reads the current network conditions from the real-time simulator and uses the anticipatory time-varying O–D de-mands to predict network conditions over the prediction horizon. New predictions could be computed in real-time whena major disruption, such as an incident, is detected. The predicted states provide the basis for setting the anticipatory prices.
In the experiments presented in the next section, comparison of the anticipatory to the reactive and static strategies isconducted using the same network simulation–assignment modeling platform. Essentially, the network state estimationmodule, which provides a mesoscopic simulation–assignment capability, is used to evaluate user responses to the pricesand associated network states, including network performance measures, such as throughput and path travel times.
In that framework, travelers receive the updated information and respond to it according to the behavioral rules built intothe assignment–simulation procedures. Assume that travelers have access to up-to-date travel time and pricing informationfor all the feasible routes in their choice set. The criteria for the driver’s route choice include monetary cost (p) and traveltime (T). Accordingly a generalized cost (GC) is specified in Eq. (13) to reflect these attributes.
GC ¼ pþ aVOT � T ð13Þ
In this case, the response follows rules based on bounded-rationality, proposed by Simon (1955) in business decisions andsubsequently adapted by Mahmassani and Stephan (1988) for modeling commuter route choice behavior (Mahmassani andLiu, 1999). Under this assumption, travelers switch routes if the improvement in the generalized cost exceeds a certainthreshold (e.g. 20% savings compared to the original route) or minimum level (e.g. 1 USD savings). Feeding the users’ routechoices to the simulator, the model generates the link concentrations and feeds back to the link toll generator for updatingtoll values.
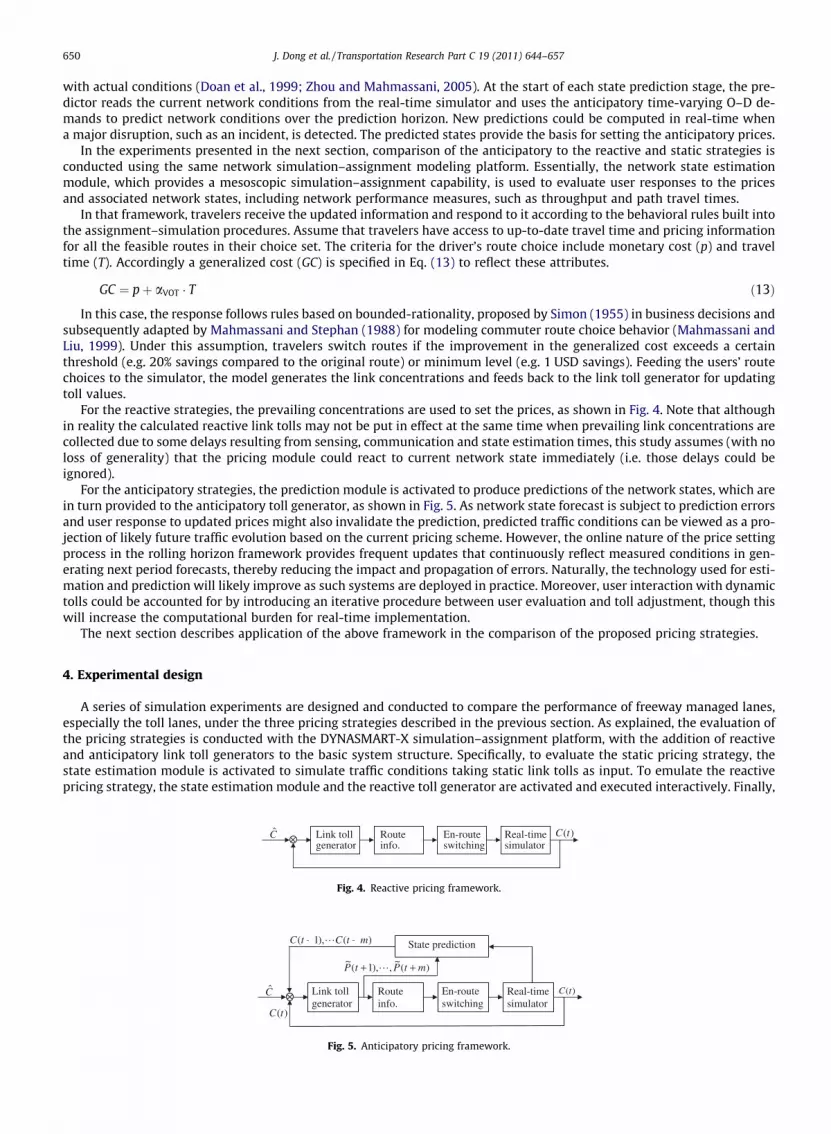
For the reactive strategies, the prevailing concentrations are used to set the prices, as shown in Fig. 4. Note that althoughin reality the calculated reactive link tolls may not be put in effect at the same time when prevailing link concentrations arecollected due to some delays resulting from sensing, communication and state estimation times, this study assumes (with noloss of generality) that the pricing module could react to current network state immediately (i.e. those delays could beignored).
For the anticipatory strategies, the prediction module is activated to produce predictions of the network states, which arein turn provided to the anticipatory toll generator, as shown in Fig. 5. As network state forecast is subject to prediction errorsand user response to updated prices might also invalidate the prediction, predicted traffic conditions can be viewed as a pro-jection of likely future traffic evolution based on the current pricing scheme. However, the online nature of the price settingprocess in the rolling horizon framework provides frequent updates that continuously reflect measured conditions in gen-erating next period forecasts, thereby reducing the impact and propagation of errors. Naturally, the technology used for esti-mation and prediction will likely improve as such systems are deployed in practice. Moreover, user interaction with dynamictolls could be accounted for by introducing an iterative procedure between user evaluation and toll adjustment, though thiswill increase the computational burden for real-time implementation.
The next section describes application of the above framework in the comparison of the proposed pricing strategies.
4. Experimental design
A series of simulation experiments are designed and conducted to compare the performance of freeway managed lanes,especially the toll lanes, under the three pricing strategies described in the previous section. As explained, the evaluation ofthe pricing strategies is conducted with the DYNASMART-X simulation–assignment platform, with the addition of reactiveand anticipatory link toll generators to the basic system structure. Specifically, to evaluate the static pricing strategy, thestate estimation module is activated to simulate traffic conditions taking static link tolls as input. To emulate the reactivepricing strategy, the state estimation module and the reactive toll generator are activated and executed interactively. Finally,
Link toll generator
Route info.
En-route switching
Real-time simulator
)(tCC
Fig. 4. Reactive pricing framework.
Fig. 5. Anticipatory pricing framework.

J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 651
for the anticipatory pricing strategy, the prediction modules are activated, in conjunction with the anticipatory toll gener-ator, and the resulting prices are supplied to the simulation–assignment model (embedded in the state estimation module).
As explained, a key motivation for implementing state-dependent pricing strategies is to maintain high LOS (or uncon-gested regime) along freeway toll lanes. The link concentrations obtained from the traffic flow model of the simulator areused as the main measures in determining the toll values. The calibrated dual-regime modified Greenshield’s model is ap-plied in the traffic simulator to represent the freeway density–speed relationship.
vðlÞ ¼ uf if 0 6 cðlÞ 6 cðlÞ
vðlÞ � v0ðlÞ ¼ ðv f ðlÞ � v0ðlÞÞ � 1� cðlÞcjamðlÞ
� �a
if cðlÞ < cðlÞ 6 cjam
ð14Þ
where a is the power term and cðlÞ is the cut-off concentration which can be used as preset target concentration. When thetraffic concentrations on toll links are kept below the cut-off value, vehicles are able to move at free-flow speed and thereforemaintain high level of service on the freeway. Under this assumption, the traffic concentration on the links are defined as theobserved variables (traffic state indicators) of the system and the toll values charged on the links are the decision variables tobe determined or optimized so as to maintain the target LOS.
4.1. The test bed network
Fig. 6 shows the test network used in this study, which is constructed based on the CHART (Maryland, United States) net-work. DYNASMART-X had been calibrated for this network using real world observations, obtained from multiple-day detec-tor data (Fei et al., 2005; Mahmassani et al., 2005a). The network consists, primarily, of the I-95 corridor betweenWashington, DC and Baltimore, MD, and is bounded by two beltways (I-695 Baltimore Beltway to the north and I-495 CapitalBeltway to the south). The network has 2241 nodes, 3459 links and 111 traffic analysis zones (TAZ). A 2-h morning peakdynamic O–D demand table estimated for the network is used in the experiments. In order to evaluate different pricing strat-egies, two of the 20-mile long southbound lanes of the I-95 corridor are converted to hypothetical toll lanes. The other twolanes of I-95 remain free. The major merge points to the I-95 corridor are from I-195, MD-100, MD-32 and MD-198, wherethe toll lanes access/egress points are specified.
Toll Lane Start I-95-MD-166 Junction
Toll Lane End I-95-I-495 Junction
Intermediate Access/Egress Locations
Fig. 6. The CHART test bed network.

652 J. Dong et al. / Transportation Research Part C 19 (2011) 644–657
4.2. Experimental factors and scenario design
The simulation experiments conducted in this study focus on two primary experimental factors: (1) the pricing methodand (2) the control factor a, a parameter which determines how the toll generator responds to the change in concentration.
4.2.1. Pricing methodThree pricing strategies are tested: (1) static pricing, (2) reactive pricing, and (3) anticipatory pricing, against no pricing
case. As discussed in the methodology section, dynamic toll values (both reactive and anticipatory) are determined accordingto real-time network state measurements (estimates) and/or predictions. Two static toll values are tested for benchmarkingpurposes. For the reactive and anticipatory pricing strategies, two types of toll generators are implemented: (1) linear tollgenerator and (2) non-linear toll generator, as specified in the previous section. Therefore, a total of six pricing scenariosare tested and compared against the base case in which no toll is applied on the freeway; that is, static-low, static-high, reac-tive-linear, anticipatory-linear, reactive-non-linear, and anticipatory-non-linear.
4.2.2. Control factor (a)The control factor a determines the rate at which link tolls are adjusted according to (prevailing or anticipatory) concen-
tration deviations from the target ones. Although the control factor can be set specifically for different links, this study ap-plies the same control factor for all links and time intervals. Moreover, similarly to what is suggested by the ramp-meteringcontrol literature, the control factor needs to be calibrated/optimized in order to achieve the desired nominal conditions, forexample, link concentrations should be lower than the cut-off values. However, optimizing this control parameter is beyondthe scope of this paper; instead, a range of a values were tested for each pricing strategy so as to produce toll values withinthe determined toll range, and the values that provided the best performance were selected. With the selected control fac-tors, the pricing strategies could then be compared in terms of traffic performance on both toll lanes and regular freewaylanes.
For all the experiments, we assume that all the users have access to pricing information posted on variable message signsand hence are able to evaluate their route at each toll road entry point (on-ramp) and to switch routes based on the specifiedroute choice mechanism (based on boundedly rational behavior in this case). In order to compare the trip travel times thesimulation is continued until the network is empty, that is, till all vehicles reach their destinations.
5. Simulation results
The simulation results are presented in this section to illustrate and compare the effectiveness of the proposed pricingstrategies, and test our motivating hypothesis that anticipatory pricing strategies have the potential to overcome the limi-tations identified in conjunction with static and reactive strategies.
5.1. Sensitivity analysis of control factor
A sensitivity analysis with respect to the control factor a is conducted for each pricing strategy and is summarized inTable 1, where travel times for different pricing strategies and different control factors are presented. The performance ofeach strategy is evaluated on the basis of four measures: travel time on toll lanes (for the entire 20-mile stretch), traveltime on regular lanes (for the entire 20-mile stretch), average OD (origin–destination) travel time for a selected major ODpair (Baltimore to Washington), and average travel time of all the vehicles in the network. The major OD pair selected notonly accounts for heavy travel demand but also consists of the two areas located towards the end points of the studiedfreeway.
For static pricing, a large a value generates a higher fixed toll on the corridor and hence leads to less congestion and lowertravel time on the toll lanes. However, this is accompanied by severely degraded conditions on the regular freeway lanes, aswell as inferior network performance due to under-utilization of the toll lanes capacity. On the other hand, a low toll encour-ages greater utilization of the toll lanes, resulting in better network-wide performance, but generating congestion along thetoll road. Between these two extremes, dynamic pricing can regulate congestion levels on the toll facilities, provide betterdistribution of traffic and hence better overall performance. The fact that dynamic tolls generally yield much greater effi-ciency gains than static tolls has also been confirmed by Arnott et al. (1990) who analyzed various pricing regimes for a fixeddemand on a network with parallel routes.
For all dynamic pricing scenarios, no apparent relationship between a values and average travel times could beestablished in this network. Table 1 reveals that anticipatory pricing strategies always provide lower travel times on the tolllanes. Although low travel time on toll lanes is preferred, the other three travel time measures are also taken into consider-ation to determine the a value. In particular, the control factor (0.01 with linear controller) that minimizes the weightedsummation of travel times on toll lanes (Ttoll), regular lanes (Tfree) and the network (Tnetwork) is selected for further compar-ison, that is,
a� ¼ arg minaðx1 � Ttoll þx2 � Tfree þx3 � TnetworkÞ: ð15Þ
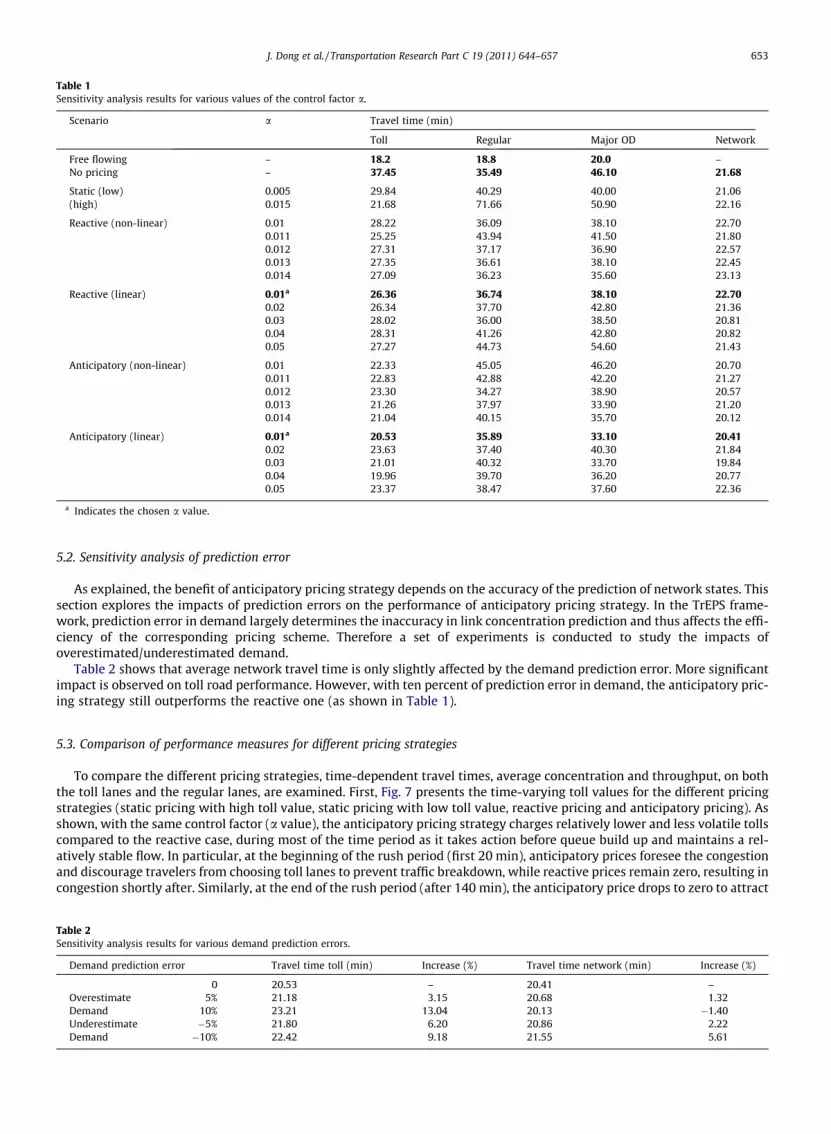
Table 1Sensitivity analysis results for various values of the control factor a.
Scenario a Travel time (min)
Toll Regular Major OD Network
Free flowing – 18.2 18.8 20.0 –No pricing – 37.45 35.49 46.10 21.68
Static (low) 0.005 29.84 40.29 40.00 21.06(high) 0.015 21.68 71.66 50.90 22.16
Reactive (non-linear) 0.01 28.22 36.09 38.10 22.700.011 25.25 43.94 41.50 21.800.012 27.31 37.17 36.90 22.570.013 27.35 36.61 38.10 22.450.014 27.09 36.23 35.60 23.13
Reactive (linear) 0.01a 26.36 36.74 38.10 22.700.02 26.34 37.70 42.80 21.360.03 28.02 36.00 38.50 20.810.04 28.31 41.26 42.80 20.820.05 27.27 44.73 54.60 21.43
Anticipatory (non-linear) 0.01 22.33 45.05 46.20 20.700.011 22.83 42.88 42.20 21.270.012 23.30 34.27 38.90 20.570.013 21.26 37.97 33.90 21.200.014 21.04 40.15 35.70 20.12
Anticipatory (linear) 0.01a 20.53 35.89 33.10 20.410.02 23.63 37.40 40.30 21.840.03 21.01 40.32 33.70 19.840.04 19.96 39.70 36.20 20.770.05 23.37 38.47 37.60 22.36
a Indicates the chosen a value.
J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 653
5.2. Sensitivity analysis of prediction error
As explained, the benefit of anticipatory pricing strategy depends on the accuracy of the prediction of network states. Thissection explores the impacts of prediction errors on the performance of anticipatory pricing strategy. In the TrEPS frame-work, prediction error in demand largely determines the inaccuracy in link concentration prediction and thus affects the effi-ciency of the corresponding pricing scheme. Therefore a set of experiments is conducted to study the impacts ofoverestimated/underestimated demand.
Table 2 shows that average network travel time is only slightly affected by the demand prediction error. More significantimpact is observed on toll road performance. However, with ten percent of prediction error in demand, the anticipatory pric-ing strategy still outperforms the reactive one (as shown in Table 1).
5.3. Comparison of performance measures for different pricing strategies
To compare the different pricing strategies, time-dependent travel times, average concentration and throughput, on boththe toll lanes and the regular lanes, are examined. First, Fig. 7 presents the time-varying toll values for the different pricingstrategies (static pricing with high toll value, static pricing with low toll value, reactive pricing and anticipatory pricing). Asshown, with the same control factor (a value), the anticipatory pricing strategy charges relatively lower and less volatile tollscompared to the reactive case, during most of the time period as it takes action before queue build up and maintains a rel-atively stable flow. In particular, at the beginning of the rush period (first 20 min), anticipatory prices foresee the congestionand discourage travelers from choosing toll lanes to prevent traffic breakdown, while reactive prices remain zero, resulting incongestion shortly after. Similarly, at the end of the rush period (after 140 min), the anticipatory price drops to zero to attract
Table 2Sensitivity analysis results for various demand prediction errors.
Demand prediction error Travel time toll (min) Increase (%) Travel time network (min) Increase (%)
0 20.53 – 20.41 –Overestimate 5% 21.18 3.15 20.68 1.32Demand 10% 23.21 13.04 20.13 �1.40Underestimate �5% 21.80 6.20 20.86 2.22Demand �10% 22.42 9.18 21.55 5.61
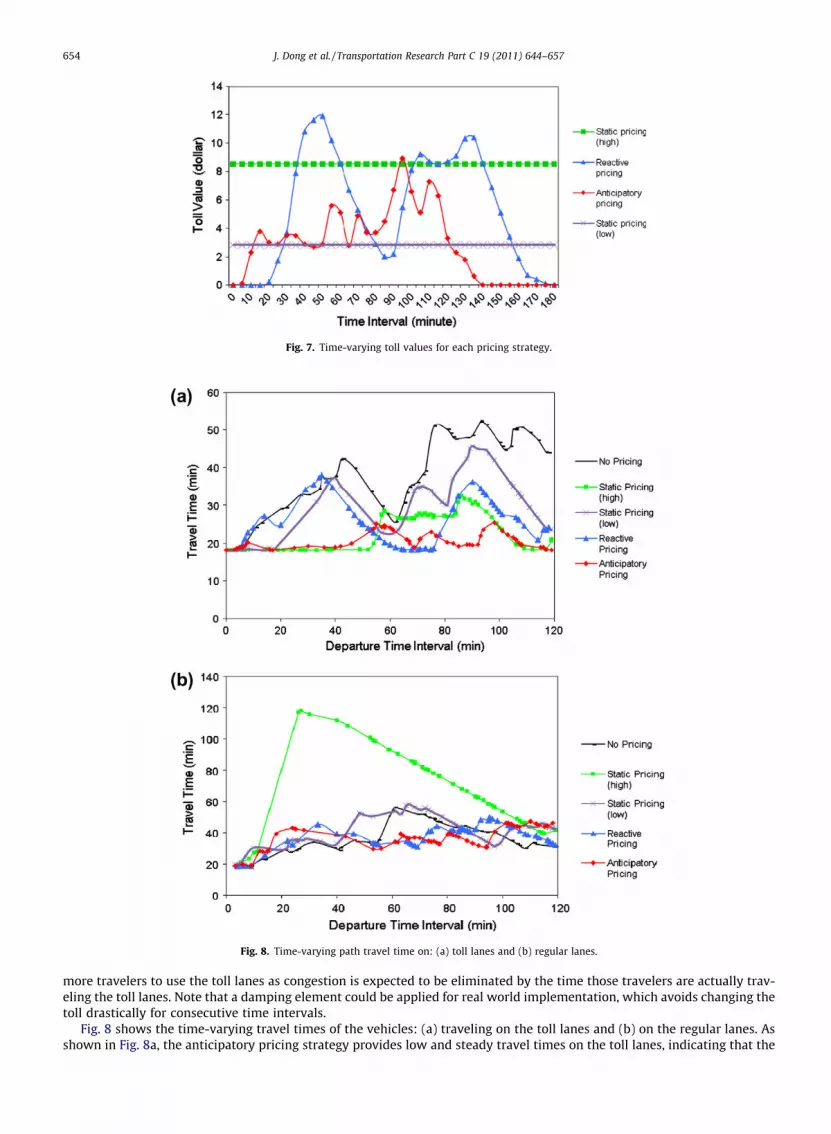
Fig. 7. Time-varying toll values for each pricing strategy.
Fig. 8. Time-varying path travel time on: (a) toll lanes and (b) regular lanes.
654 J. Dong et al. / Transportation Research Part C 19 (2011) 644–657
more travelers to use the toll lanes as congestion is expected to be eliminated by the time those travelers are actually trav-eling the toll lanes. Note that a damping element could be applied for real world implementation, which avoids changing thetoll drastically for consecutive time intervals.
Fig. 8 shows the time-varying travel times of the vehicles: (a) traveling on the toll lanes and (b) on the regular lanes. Asshown in Fig. 8a, the anticipatory pricing strategy provides low and steady travel times on the toll lanes, indicating that the
J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 655
desired traffic flow conditions (uncongested flow) are attained and maintained to a large extent. Although static pricing witha high toll value also provides relatively high LOS (in terms of travel time) on the toll lanes, it dramatically degrades the LOSon the alternative freeway lanes, as shown in Fig. 8b. Furthermore, as seen in Figs. 9 and 10, the throughput of the toll lanesunder the high static toll is quite low, reflecting low utilization.
It is intuitive that the travel time on the toll lanes would be longer when no toll is charged than when pricing strategiesare implemented, as is confirmed in Fig. 8a. One might also expect that the travel time on alternative regular lanes would belower under the no pricing case than in pricing cases as pricing limits utilization of the toll road and diverts more traffic toregular lanes. This is indeed the case when static pricing strategies are implemented, especially with a high toll value. How-ever, with dynamic pricing, traffic conditions on the regular lanes do not deteriorate compared with the base case, as shownin Fig. 8b. The explanation lies in the nature of traffic congestion dynamics. Without pricing, the freeways are congested andexperience breakdown early on, resulting in highly unstable flow, and longer travel time on all lanes. Anticipatory dynamicpricing plays a metering effect on both the toll lanes and the regular lanes, as reflected in the traffic state descriptors dis-cussed next.
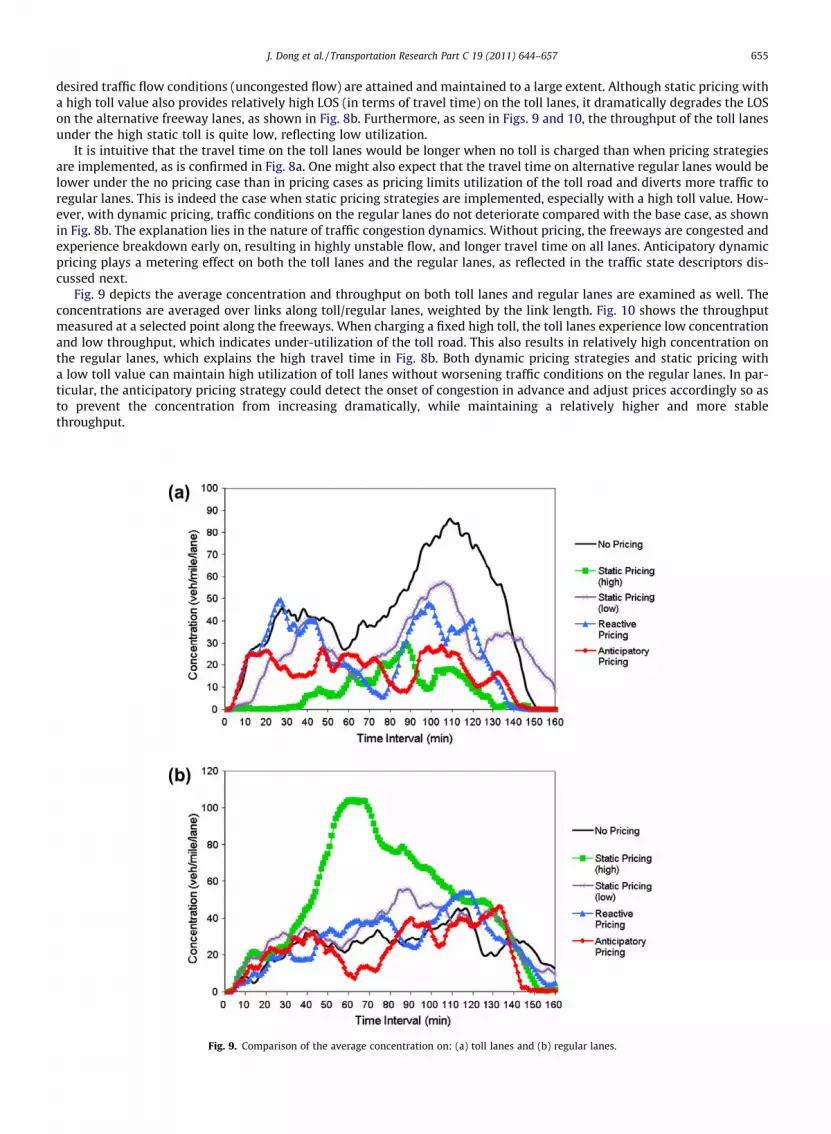
Fig. 9 depicts the average concentration and throughput on both toll lanes and regular lanes are examined as well. Theconcentrations are averaged over links along toll/regular lanes, weighted by the link length. Fig. 10 shows the throughputmeasured at a selected point along the freeways. When charging a fixed high toll, the toll lanes experience low concentrationand low throughput, which indicates under-utilization of the toll road. This also results in relatively high concentration onthe regular lanes, which explains the high travel time in Fig. 8b. Both dynamic pricing strategies and static pricing witha low toll value can maintain high utilization of toll lanes without worsening traffic conditions on the regular lanes. In par-ticular, the anticipatory pricing strategy could detect the onset of congestion in advance and adjust prices accordingly so asto prevent the concentration from increasing dramatically, while maintaining a relatively higher and more stablethroughput.
Fig. 9. Comparison of the average concentration on: (a) toll lanes and (b) regular lanes.
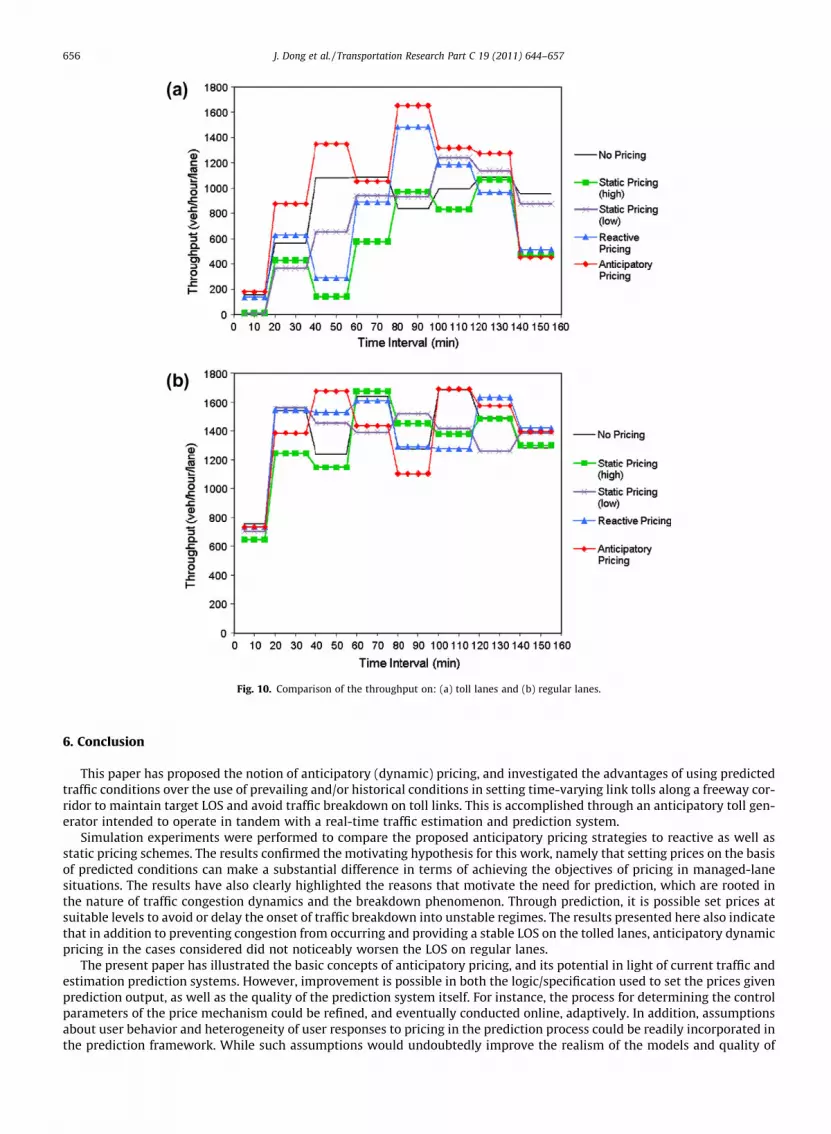
Fig. 10. Comparison of the throughput on: (a) toll lanes and (b) regular lanes.
656 J. Dong et al. / Transportation Research Part C 19 (2011) 644–657
6. Conclusion
This paper has proposed the notion of anticipatory (dynamic) pricing, and investigated the advantages of using predictedtraffic conditions over the use of prevailing and/or historical conditions in setting time-varying link tolls along a freeway cor-ridor to maintain target LOS and avoid traffic breakdown on toll links. This is accomplished through an anticipatory toll gen-erator intended to operate in tandem with a real-time traffic estimation and prediction system.
Simulation experiments were performed to compare the proposed anticipatory pricing strategies to reactive as well asstatic pricing schemes. The results confirmed the motivating hypothesis for this work, namely that setting prices on the basisof predicted conditions can make a substantial difference in terms of achieving the objectives of pricing in managed-lanesituations. The results have also clearly highlighted the reasons that motivate the need for prediction, which are rooted inthe nature of traffic congestion dynamics and the breakdown phenomenon. Through prediction, it is possible set prices atsuitable levels to avoid or delay the onset of traffic breakdown into unstable regimes. The results presented here also indicatethat in addition to preventing congestion from occurring and providing a stable LOS on the tolled lanes, anticipatory dynamicpricing in the cases considered did not noticeably worsen the LOS on regular lanes.
The present paper has illustrated the basic concepts of anticipatory pricing, and its potential in light of current traffic andestimation prediction systems. However, improvement is possible in both the logic/specification used to set the prices givenprediction output, as well as the quality of the prediction system itself. For instance, the process for determining the controlparameters of the price mechanism could be refined, and eventually conducted online, adaptively. In addition, assumptionsabout user behavior and heterogeneity of user responses to pricing in the prediction process could be readily incorporated inthe prediction framework. While such assumptions would undoubtedly improve the realism of the models and quality of
J. Dong et al. / Transportation Research Part C 19 (2011) 644–657 657
prediction, they do change in a fundamental manner the basic insight and conclusions of the present work regarding thevalue of prediction in setting prices dynamically. Future work along the lines delineated herein would preferably need toproceed in tandem with actual system observation and testing.
Acknowledgment
The authors are grateful to five anonymous referees whose comments and suggestions have greatly improved the clarityof the paper. This paper has also benefited from several profitable discussions with Pravin Varaiya. Of course, the authorsremain responsible for all content in this paper.
References
Arnott, R., de Palma, A., Lindsey, R., 1990. Departure time and route choice for the morning commute. Transportation Research Part B 24 (3), 209–228.Bellemans, T., De Schutter, B., De Moor, B., 2004. Anticipative ramp metering control for freeway traffic networks. In: Proceedings of the 16th International
Symposium on Mathematical Theory of Networks and Systems, Leuven, Belgium.Ben-Akiva, M., Bierlaire, M., Koutsopoulos, H.N., Mishalani, R., 2002. Real-time simulation of traffic demand–supply interactions within DynaMIT. In:
Gendreau, M., Marcotte, P. (Eds.), Transportation and Network Analysis: Current Trends. Kluwer Academic Publishers, Berlin, pp. 19–36 (Miscellenea inhonor of Michael Florian).
Chu, L.Y., Liu, H.X., Recker, W., Zhang, H.M., 2004. Performance evaluation of adaptive ramp-metering algorithms using microscopic traffic simulationmodel. Journal of Transportation Engineering 130 (3), 330–338.
Doan, D., Ziliaskopoulos, A., Mahmassani, H.S., 1999. On-line monitoring system for real-time traffic management applications. Transportation ResearchRecord (1678), 142–149.
Dong, J., Lu, C.-C., Mahmassani, H.S., 2006. How reliable is this route? Predictive travel time and reliability for anticipatory traveler information systems.Transportation Research Record (1980), 117–125.
Fei, X., Eisenman, S., Mahmassani, H.S., Zhou, X., 2005. Application of DYNASMART-X to the Maryland CHART network real-time traffic management centerdecision support. In: Proceedings of the 12th World Congress on Intelligent Transportation Systems, San Francisco, CA.
Kaysi, I.A., 1992. Framework and Models for the Provision of Real-Time Driver Information, Ph.D. Dissertation, Massachusetts Institute of Technology.Liu, J.S., Kim, J.L., Chen, Y., Hao, Y., Lee, S., Kim, T., Thomadakis, M., 1994. An Advanced real-time ramp metering system (ARMS): the system concept. Report
FHWA/TX-94/1232-24, College Station, Texas.Lu, C.-C., Mahmassani, H.S., Zhou, X., 2008. A bi-criterion dynamic user equilibrium traffic assignment model and solution algorithm for evaluating dynamic
road pricing strategies. Transportation Research Part C 16 (4), 371–389.Mahmassani, H.S., 1998. Dynamic traffic simulation and assignment: models, algorithms, and applications to ATIS/ATMS evaluation and operation. In:
Labbé, M., Laporte, Tanczos, K., Toint, P. (Eds.), Operations Research and Decision Aid Methodologies in Traffic and Transportation Management, NATOASI Series. Springer, pp. 104–132.
Mahmassani, H.S., 2001. Dynamic network traffic assignment and simulation methodology for advanced systems management applications. Networks andSpatial Economics (1), 267–292.
Mahmassani, H.S., Liu, Y.-H., 1999. Dynamics of commuting decision behaviour under advanced traveler information systems. Transportation Research PartC 7 (2/3), 91–107.
Mahmassani, H.S., Stephan, D.G., 1988. Experimental investigation of route and departure time choice dynamics of urban commuters. TransportationResearch Record (1203), 69–84.
Mahmassani, H.S., Zhou, X., 2005. Transportation system intelligence: performance measurement and real-time traffic estimation and prediction in a day-to-day learning framework. In: Abed, E., (Ed.), Advances in Control, Communication Networks, and Transportation Systems (Chapter 16, in Honor ofPravin Varaiya, Birkhauser).
Mahmassani, H.S., Zhou, X., Qin, X., Lu, C.-C., 2004. DYNASMART-X User’s Guide and Programmer’s Guide. Maryland Transportation Initiative, University ofMaryland.
Mahmassani, H.S., Fei, X., Eisenman, S., Zhou, X., Qin, X., 2005a. DYNASMART-X Evaluation for Real-Time TMC Application: CHART Test Bed, Final ResearchReport, Maryland Transportation Initiative, University of Maryland.
Mahmassani, H.S., Lu, C.-C., Dong, J., 2005b. Value of information: provision of anticipatory descriptive travel information through a real-time trafficestimation and prediction system. In: Proceedings of the 12th World Congress on Intelligent Transportation Systems, San Francisco, CA.
Messmer, A., Papageorgiou, M., 1990. METANET: a macroscopic simulation program for motorway networks. Traffic Engineering and Control 31, 466–470.Paesani, G., Kerr, J., Perovich, P., Khosravi, E., 1997. System wide adaptive ramp metering in southern California. In: Proceedings of the ITS America 7th
Annual Meeting.Papageorgiou, M., Hadj-Salem, H., Blosseville, J.M., 1991. ALINEA: a local feedback control law for on-ramp metering. Transportation Research Record
(1320), 58–64.Papageorgiou, M., Hadj-Salem, H., Middleham, F., 1997. ALINEA local ramp metering: summary of field results. Transportation Research Record (1603), 90–
98.Papageorgiou, M., Diakaki, C., Dinopoulou, V., Kotsialos, A., Wang, Y., 2003. Review of road traffic control strategies. In: Proceedings of the IEEE, vol. 91, no.
12, pp. 1043–2067.Peeta, S., Mahmassani, H.S., 1995. Multiple user classes real-time traffic assignment for on-line operations: a rolling horizon solution framework.
Transportation Research Part C 3 (2), 83–98.Perez, B.G., Sciara, G.-C., (Principal Authors), 2003. A Guide for HOT Lane Development. Parsons Brinckerhoff and Texas Transportation Institute, prepared
for the Federal Highway Administration (FHWA-OP-03-009). <http://www.hovworld.com/publications_assets/HOTLaneDevelopmentGuide.pdf>.Schweitzer, D., 2004. Proactive vs. reactive: which network management approach is best for your company? Processor 26 (45).Simon, H., 1955. A behavioral model of rational choice. Quarterly Journal of Economics 69 (1), 99–118.Small, K.A., Yan, J., 2001. The value of ‘‘value pricing” of roads: second-best pricing and product differentiation. Journal of Urban Economics 49, 310–336.Smaragdis, E., Papageorgiou, M., 2003. Series of new local ramp metering strategies. Transportation Research Record (1856), 74–86.Verhoef, E.T., 2002. Second-best congestion pricing in general static transportation networks with elastic demands. Regional Science and Urban Economics
(32), 281–310.Zhang, M., Kim, T., Nie, X., Jin, W., Chu, L., Recker, W., 2001. Evaluation of On-ramp Control Algorithms. California PATH Research Report, UCB-ITS-PRR-2001-
36, University of California, Berkeley.Zhou, X., Mahmassani, H.S., 2005. Online consistency checking and origin–destination demand updating: recursive approaches with real-time dynamic
traffic assignment operation. Transportation Research Record (1923), 218–226.Zhou, X., Mahmassani, H.S., 2007. A structural state space model for real-time traffic origin–destination demand estimation and prediction in a day-to-day
learning framework. Transportation Research Part B 41, 823–840.