robust collaborative-relay beamforming
TRANSCRIPT

3130 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
Robust Collaborative-Relay BeamformingGan Zheng, Member, IEEE, Kai-Kit Wong, Senior Member, IEEE, Arogyaswami Paulraj, Fellow, IEEE, and
Björn Ottersten, Fellow, IEEE
Abstract—Relay communications is a promising technique to ex-tend the range of wireless communications by forwarding the mes-sage from the sender to the intended destination. While fixed orvariable-power relays have been previously investigated, this paperaddresses the collaborative use of variable-phase variable-poweramplify-and-forward (AF) relays for robust beamforming, with theaid of imperfect channel state information (CSI) at the sender.In particular, the maximization of the worst-case signal-to-noiseratio (SNR) at the destination terminal is studied under a boundedspherical region for the norm of the CSI error vector from the re-lays to the destination. Our main contribution is that we prove,under a condition on the quality of the estimated CSI, the robust-optimal collaborative-relay beamforming (CRBF) can be obtainedby S-Procedure and rank relaxation techniques. In addition, a dis-tributed algorithm is developed by examining the structure of theoptimal CRBF solution. Results demonstrate a significant gain ofCRBF over non-robust approaches.
Index Terms—Collaborative beamforming, MIMO, relay.
I. INTRODUCTION
I N spite of its pervasiveness, communications over wirelesschannels continues to be one major challenge of today’s
technologies. While the emergence of multiple-input multiple-output (MIMO) systems has offered a means to create more ca-pacity for a given transmit power and bandwidth [1], [2], the useof MIMO itself is tightly constrained by the available space ina mobile device. In practice, this not only indicates that the per-formance of MIMO might degrade considerably due to signalcorrelation among antennas, but also that the implementationof MIMO could be incredibly expensive. On a rather separateroute, recent researches have revealed that the performance ofa wireless channel in terms of the capacity can be greatly en-hanced by a relay, which forwards the sender’s message to theintended destination. In [3]–[15], it was shown that relays cancooperate to form a distributed MIMO system.
While MIMO has been well studied in the past decade, relaycommunication research has only begun to blossom recently al-
Manuscript received October 23, 2008; accepted March 23, 2009. First pub-lished April 21, 2009; current version published July 15, 2009. The associateeditor coordinating the review of this manuscript and approving it for publi-cation was Prof. Mounir Ghogho. This work was supported by EPSRC undergrants EP/D058716/1 and EP/E022308/1.
G. Zheng and K.-K. Wong are with the Department of Electronic and Elec-trical Engineering, University College London, London, WC1E 7JE, U.K.(e-mail: [email protected]; [email protected]).
A. Paulraj is with the Information Systems Laboratory, Stanford University,Stanford, CA 94305 USA (e-mail: [email protected]).
B. Ottersten is with the School of Electrical Engineering, Royal Institute ofTechnology (KTH), Stockholm, Sweden, and also with securityandtrust.lu, Uni-versity of Luxembourg, L-1511 Luxembourg (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TSP.2009.2021456
though the idea of relay dates back as early as 70’s [16]. Therevival of the use of relay is largely driven by the introduc-tion of user cooperation where the essence is to let a user pro-vide a diversity path for another user, as in MIMO systems.Recently in [17], user cooperation was also proposed to helpthe users in the cell boundary of a cellular network. Coopera-tion diversity can be roughly categorized into three main types:1) compress-and-forward (CF) or coded cooperation [6]–[10],2) amplify-and-forward (AF) [11], [12], and 3) decode-and-for-ward (DF) [13], [14]. CF follows intimately from the space-timecoding techniques in MIMO systems undergoing fast fading,which requires no prior knowledge of the channel, but will needa multidimensional decoder at the destination. In AF, the relaysimply scales the received noisy signal from the sender andforwards it to the destination while DF decodes the sender’smessage and forwards a re-encoded message to the destination.Among them, AF is arguably the most attractive strategy, dueto its relatively low complexity for implementation.1 While pre-vious studies focused mostly on the use of fixed-gain AF re-lays, recent attempts have turned to the joint optimization of thepower allocation at the relays with the aid of perfect or imper-fect channel state information (CSI) [18]–[22].
When CSI is exploited, the relays can work collaborativelyin a way similar to a MIMO system to form a virtual beamfor improving the performance of the destination receiver. Inthis respect, the optimal power allocation at the relays has beenaddressed for the case with mean or covariance CSI in [18]and with perfect CSI in [18]–[20]. In addition, in [21], a mul-tihop relay channel has been analyzed with a power alloca-tion policy proposed based on an approximate outage proba-bility expression at high signal-to-noise ratios (SNRs). Thoughit may be possible to estimate the CSI nearly perfectly at therelays if the training SNR is high, the CSI at the source is byno means perfect, due to factors such as quantization noise. Tocope with imperfect CSI, Quek et al. studied the optimizationof the power allocation at the relays in accordance with the es-timated CSI and its uncertainty region [22]. In particular, theauthors of [22] proposed to bound the CSI errors by an ellipsoidand attempted to minimize the total relay power for maintaininga given worst-case SNR. However, the approach used in [22] in-tentionally neglected the dependance existed between the signaland noise due to the same CSI uncertainty, which greatly sim-plified the problem but the solution is very suboptimal. Also, thephase errors in CSI were not considered.
In this paper, we address the problems of optimizing the AFrelays’ weights (or variable-power variable-phase amplificationcoefficients) to produce a virtual beam for SNR enhancement
1For half-duplex relays which we consider in this paper, an AF relay is easierto implement than the DF one because a DF relay needs additional processingto decode and re-encode the received signal.
1053-587X/$25.00 © 2009 IEEE

ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3131
subject to individual relays’ peak-power constraints. Our aimis to maximize the worst-case SNR if CSI is imperfect butbounded. This paper has made the following contributions.
1) With imperfect CSI and its uncertainty being bounded bya sphere, an algorithm to determine the collaborative-relaybeamforming (CRBF) vector for maximizing the worst-case SNR at the destination is devised using S-Procedureand rank relaxation techniques.
2) We prove that under a condition on the estimated CSI, therank relaxation is exact, and therefore the proposed al-gorithm is guaranteed to give the optimal rank-1 CRBFvector. The algorithm is also refined to ensure that a good,if not known to be optimal, CRBF vector is always returnedwhen a higher-rank solution arises.
3) In addition, an upper bound of the worst-case SNR isobtained from solving a second-order cone-programming(SOCP) problem, which has the interpretation of being themaximum achievable worst-case SNR if the CSI errorsare constrained to be real-valued. This provides a tightbenchmark for the proposed algorithm.
4) Most important of all, a distributed implementation algo-rithm, which allows each relay to learn its own weight toachieve near-optimal performance, is also devised.
In the sequel, vectors are denoted by lowercase bold letterswhile matrices are written in uppercase boldface letters. The su-perscripts , and stand for, respectively, the conjugate, Her-mitian and transposition of a complex scalar or matrix.is the trace of and is an identity matrix of appropriate size.The complex and real number fields are denoted by and ,respectively. computes the expectation of an input randomentity. takes the modulus of a complex number andreturns the Frobenius norm of a vector or matrix. The nota-tion means that is a vector of complexGaussian random variables with mean vector and covari-ance matrix . Likewise, denotes a uniformrandom variable over the interval . In addition, the nota-tion denotes a positive semi-definite matrix .
II. SYSTEM MODEL AND PROBLEM FORMULATION
A. The Relay Channel
Consider a channel with a source , a destination andrelays , as shown in Fig. 1. We assume no direct link be-tween and and therefore the use of relays is necessary to es-tablish the communication link. The relays work synchronouslyin an AF manner by the complex coefficients to producea virtual beam pointing to . The channel is assumed to be inslow flat fading, and static, during which the optimization of
is performed. We denote the channel between andas , and the channel between and as .While the propagation losses are ignored in the model for con-venience, they can be easily included in and to re-flect the relative locations of the relays.
At the relay, , the received signal is given by
(1)
where is the transmitted signal from with , anddenotes the noise at . The received signal
is then multiplied by before it is forwarded to . The
Fig. 1. The CRBF system model.
scaling factor is used to normalizethe output power of to , i.e.,
(2)
To reflect the power constraint of an individual relay, we have. The received signal at , , is the superposition of
the weighted noisy signals forwarded by , so that
(3)
where is the channel (column) vector containing the coeffi-cients , is the channel (column) vector containingthe coefficients , denotes the beamforming(column) vector containing the coefficients , is thenoise (column) vector containing the elements , isthe noise component at such that ,returns a diagonal matrix with the entries of , and is thescaling (column) vector containing the coefficients .
The metric of interest is the received SNR at , given by
(4)
Note that the noise at the relays plays a role as self-interferenceat . With perfect CSI, the problem is to maximize the receivedSNR subject to individual relay power constraints, i.e.,
(5)
where and are used element-wisely, and denotes a vectorcontaining the elements . In this paper, we are interested inthe case where the CSI is known imperfectly at with its uncer-tainty bounded by a region (the model to be presented inSection II-B). Our aim is thus to maximize the worst-case SNRwith the relay power constraints, i.e.,
(6)
B. CSI Uncertainty and Worst-Case SNR Maximization
The channels can be directly estimated from training at .At high training SNRs, it is reasonable to assume that can beknown nearly perfectly at . This is, however, not true for ,

3132 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
which, in practice, will have to be estimated by the relays andthen fed back to . We model the CSI error in as
(7)
where denotes the estimated CSI known atand is the error vector. We assume nostatistical knowledge about the error but the error normis bounded by some , i.e., , where
(8)
This spherical error model has been used to characterize errorscaused by, such as, quantization and estimation [23] and can beviewed as a deterministic modeling or simplification of the moresophisticated stochastic CSI error model [23]–[26]. It is worthnoting that the results of this paper can be easily extended to thecase with an ellipsoidal error region.
To proceed, we rewrite (6) as
(9)
Since is quasi-convex, it can be solved through solving thefollowing problem for some given
(10)
The optimal solution of can be obtained by solving re-peatedly using the bisection algorithm [27]. As a result, in thesequel, we focus on finding the optimal solution of . To see
the difficulty of solving , the worst-case SNR constraint canbe expressed as , where
(11)
The challenge here lies in that the minimum of is verydifficult to evaluate as both the signal and the self-interferencecontain the common channel uncertainty. It is known in [28] thatsuch a constraint is mathematically intractable.
C. Performance Upper Bound
To derive an upper bound for the maximum worst-case SNRof , the following box uncertainty region is considered
(12)
This box region is only a subset of the original sphere andtherefore the robust design based on (rather than ) willresult in an upper bound on the maximum achievable worst-caseSNR (or a lower bound on the minimum power for ).For convenience, we define and
(13)
and consider the following modified problem see equation (14)at the bottom of the page. Then, we introduce a (element-wise)phase-shifted version of , denoted by , such that
and further define the real-valued estimatedCSI, , and an element-wise phase-shifted CSI uncer-tainty vector as
(15)
As a result, we have , and. Then, (14) now reads as (16),
shown at the bottom of the page. The following lemma providesa lower bound for the minimum achieving the
(14)
(16)

ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3133
worst-case SNR, , which also gives the upper bound on themaximum worst-case SNR.
Lemma 1: The maximum achievable worst-case SNR ofis upper bounded by solving the convex power minimizationproblem (in tandem with the bisection search) shown in (17) atthe bottom of the page, whereis a real-valued box set. The required complexity is of the order
, as it has constraints (or vertices). Also, is a real-valued vector.
Proof: In (17), the CSI uncertainty region is restrictedto be in the real number space, so the degree of freedom forthe CSI error is reduced and therefore the achievable worst-caseSNR is improved. In addition, since both and are real, theoptimal solution is also real and nonnegative. Moreover, if iscomplex, then we can always choose to have as the newsolution without losing the optimality, because
. As such, (17) gives anupper bound for the maximum worst-case SNR.
To see the complexity, define
(18)
The constraint in (17) is equivalent to .Note that is convex in . From [27], it is known that its max-imum should be attained in the vertices. Therefore, the solutionof (17) can be obtained by enumerating vertices of the boxregion , each one corresponding to an SOCP constraint. Asa result, the complexity is at least .
III. ROBUST CRBF
The upper bound is generally not achievable and does notoffer any insight on the maximization of the worst-case SNR.Here, we propose a scheme to obtain the robust CRBF vector.
A. Optimizations Using S-Procedure and Rank Relaxation
With the set , the constraint in (10) can be rewritten as
(19)
where
. . . (20)
Using S-Procedure [29]–[31] for the complex case given inAppendix A, (19) can be equivalently expressed as
(21)
Introducing rank relaxation to write , , or (10), withthe CSI errors bounded by is reformulated as (22), shown atthe bottom of the page, where denotes the el-ement of . This is recognized as a semi-definite programming(SDP) problem in and thus can be optimally solved. The asso-ciated complexity to solve this SDP is peraccuracy digit, where is the solution accuracy [32]. Similarly,the worst-case SNR maximization problem , or (9), with theuncertainty set and the rank relaxation , becomes(23), shown at the bottom of the page. It is noted that can beoptimally and efficiently solved by repeatedly solving usingthe bisection search approach.
At this point, the important question, whether the solution ofor is of rank-1, remains. If is of rank-1, then the CRBF
(17)
(22)
(23)

3134 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
vector, , can be extracted by standard matrix decompositionand more importantly, this solution is guaranteed to be globallyoptimal under . As a matter of fact, SDP relaxation has beenwidely used for the design of MIMO beamforming with CSI[33]–[35], and in some rare cases, e.g., [33], [35], the relaxationis provably exact and thus always gives the rank-1 optimal solu-tion. Whether this is true for our CRBF problem with imperfectCSI will be addressed in the next subsection.
B. Tightness of the Rank Relaxation
Lemma 2: The optimal solution, , of is real-valued.Proof: See Appendix B.
Lemma 3: Define
(24)
Then, the two image sets, and , are equal, where
(25)
Proof: See Appendix C.Theorem 1: If , then always has a rank-1
optimal solution . Choosing such that , theoptimal weight at the th relay is given by
(26)
Proof: Using Lemma 2, can be rewritten as see equa-tion (27) at the bottom of the page. Then, applying S-Procedurefor the real case (see Appendix A) to (27) leads to
(28)
where it has a spherical uncertainty set in real numbers space
(29)
We recognize that (28) is the SDP-relaxation version of
(30)
It may seem somewhat surprising to see both the optimizingvariable and the worst CSI error in real number space, ifwe compare this problem with under the (complex) uncer-tainty set . A stronger result has been given in Lemma 3, fromwhich it is clearly seen that the real channel uncertainties resultin the same image as the complex ones, which gives avalidation of (30). Our next focus then studies if the exact solu-tion of (30) can be found by solving (27) and (28).
With the condition on the estimated CSI, , (30)is equivalent to (31) , shown at the bottom of the page, which isrecognized as an SOCP about and is expected to be optimallysolved. However, the uncertainty set cannot be enumerated com-pletely because is continuous over . In other words, (31)has infinitely many SOCP constraints and is thus not solvable.To proceed, we use the following result in Lemma 4, to addressthe rank issue of the optimal solution of (28), (30), and (31).
Lemma 4: When , (28) always returns a rank-1solution, which is also optimal for (30) and (31).
Proof: See Appendix D.Using this lemma, (28), (30), and (31) always have a rank-1
optimal solution. In addition, since (28) is equivalent to (27) byS-Procedure, (27) also has a rank-1 solution whenever (30)is feasible. Once the optimal is available, we can get
and then recover the optimal CRBF by (26).Theorem 1 presents a sufficient condition, , for
the existence of a rank-1 optimal solution. It is, however, worthemphasizing that this condition is generally not necessary andthe optimal solution being rank-1 may occur even if thiscondition is not satisfied (see simulation results in Section IV).
(27)
(31)

ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3135
C. The Proposed Algorithm
Based on our results, Algorithm 3.1 is proposed to solve(6) or (9). Due to the quasi-convexity of , it can be optimallysolved by repeatedly solving using a bisection search, whichexploits the CSI, and , the power constraints of the relays,specified by , the error region , and a pair of upper and lowerbounds on the achievable worst-case SNR, denoted as and
, respectively. In practice, can be simply set to 0 whilemay be obtained by removing the individual relay power
constraints. The remaining task is then to determine the optimalsolution for through solving using S-Procedure and rankrelaxation as discussed.
Algorithm 3.1: CRBF
For some ,
The subroutine is the direct application of the bisectionmethod to solve by repeatedly solving . If returns arank-1 solution, this will ensure the optimal to be found.Otherwise, the subroutine will be used, which backs off theachievable worst-case SNR to find a rank-1 CRBF vector.
D. Distributed Implementation
After has computed , it needs to inform each individualrelay about its own weight, , which in practice will take somebandwidth to do so and could be costly if the number of relaysis large. Here, we examine the structure of the optimal robustCRBF vector and the impact of channel errors, and then exploitthis to develop a distributed algorithm that permits each indi-vidual relay to derive locally. Note that though it is possibleto calculate the beamforming weight in a distributed manner, a
globally perfect time base between the relays is assumed as inprevious work [36] for both channel estimation and transmis-sion to realize coherent combining of signals at the destination;otherwise, the phase differences among the relays will degradethe maximum received SNR [37].
Theorem 2: If the resulting solution to satisfies, then always has a rank-1 optimal solution . The op-
timal beamforming weight is given by
(32)
where are dual variables and is chosen to satisfythe power constraints.
Proof: If , the worst CSI error is [30]
(33)
As a result, the optimal CRBF design is performed as if thechannel is , and always gives a rank-1 optimalsolution, which can also be seen from its dual problem
(34)
where is a zero matrix except its diagonal elementbeing and denotes a vector containing .Also, the last inequality constraint in (34) can be reexpressedas
(35)
When (or it is of full-rank), we have obviously
(36)
Due to the complementary slackness, which requires
(37)
and must be of rank-1 and . As such,according to the complementary condition, must also be ofrank-1. On the other hand, it follows that and
(38)

3136 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
Due to the complementary condition , we get (32) or
(39)
with due to the constraints and if .From the dual problem, the impact of CSI errors on the op-
timal solution can be seen in (34) with . In this case,are both zero and the beamforming solution becomes
(40)
In (34), reflects the impact of CSI errors andis the worst case channel. Using Theorem 2, a distributed algo-rithm is possible if can learn the local optimizing parameters
and . To see this, we rewrite (34) as
(41)
If we define , it can be rewritten as (42), shownat the bottom of the page, where denotes the minimumeigenvalue of an input matrix. Now we have another interestinginterpretation about the original primal problem (10) and its dualproblem (42). The primal problem (10) needs to satisfy everySNR constraint caused by the CSI error, i.e., to guarantee the
worst-case performance, while the dual (42) is only required tomeet the most favorable CSI error. This result coincides witha recent work in the field of robust optimization [38]. In otherwords, any CSI error, say , other than the optimal solutionwill not satisfy the constraint in (42). Also, due to [38, Lemma1], this constraint is equivalent to (43), shown at the bottom ofthe page, and at the optimum, the “ ” sign is expected becauseif the left-hand-side (LHS) is less than 1, then the optimal for(42) can always be increased until it equals 1.
As a result, the optimal solution for (42) is also optimalfor (44), shown at the bottom of the page, which has the optimalobjective value as 1. This problem can further be rewritten as
(45)
which has the Lagrangian given by
(46)
The first-order optimality condition is therefore
(47)
(42)
(43)
(44)

ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3137
which can be simplified to
(48)
where is a solution to the constraint .If knows and in addition to its local information such
as , then (48) can be applied to obtain the op-timal value of . Nevertheless, since (48) may have multipleroots, the relay needs a metric, which requires only knowl-edge of local CSI, to choose the best root. Inspired by the La-grangian in (46), we propose to find by
(49)
Note that this minimization has a tendency to minimize the orig-inal objective function in (44) and (45), but the solution to (49)is not guaranteed to be globally optimal.
Before we formalize the distributed algorithm, we note thatis a common parameter for all relays. As a result, it is relativelyeconomical for to inform the relays about . On the otherhand, we are going to show that although is specific to eachrelay, it is unimportant. In particular, one of the complementaryconditions of (41) requires that
(50)
This means that if , the optimal weight is simply. Otherwise, and
(51)
Hence, can be eliminated and we have
(52)
Summarizing this, the distributed algorithm is presented.1) finds the worst-case SNR by solving the dual problem
(34) using the bi-section search that guarantees a rank-1to be obtained. At that point, the optimal values for , ,
, and also are all known. The optimal in (46) canbe computed by (48) and . In addition, isfound from the power constraint on .
2) then broadcasts , , and to all .3) The relay, , calculates the roots of
(53)
in the interval , and chooses theroot by (49) (with ). If no root exists, will useits full power, i.e., ; otherwise, (52) isused to find .
This distributed algorithm is however not guaranteed tobe optimal because of the rank-issue. Also, its performancemay be degraded by two more reasons. First, in Step 1, theobtained SNR, , may be smaller than the maximum achievableworst-case SNR since the condition of the dual variablebeing rank-1 is only sufficient but not necessary for the rank-1primal variable . In addition, in Step 3, optimality is lost basedon , rather the actual Lagrangian. The overall performanceof the proposed algorithm will be evaluated in Section IV.
IV. SIMULATION RESULTS
A. Setup
Simulations are conducted to evaluate the performance of theproposed CRBF systems in Rayleigh flat-fading channels as-suming , which may be interpreted as the situ-ation where the relays are somewhere in the middle of and .The CSI errors are assumed to be uniformly distributed withinthe region . For convenience, it is assumed that the relays havethe same power constraint, i.e., . The transmitSNR, defined as , is set to be 10 (dB) and the worst-casemetric, is used to measure the system perfor-mance. To generate the results, we use Sedumi [40] togetherwith YALMIP [41] to numerically solve the SOCP and SDPproblems. Results for the following schemes are provided: a)the proposed robust CRBF algorithm in Section III-C, b) thedistributed algorithm in Section III-D, c) the upper bound inSection II-C (Lemma 1), d) the nonrobust method, which trans-mits full-power at each relay and matches the relays’ phases tothat of the estimated CSI, and e) the lower bounding approach,as described below.
To overcome the difficulty of handling the worst-case SNRconstraint (11), it is possible to get a lower bound for ,denoted as , so that the worst-case SNR constraint can be re-inforced by ensuring that . Given , such a lowerbound can be derived by noting that
(54)
and
(55)
3138 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
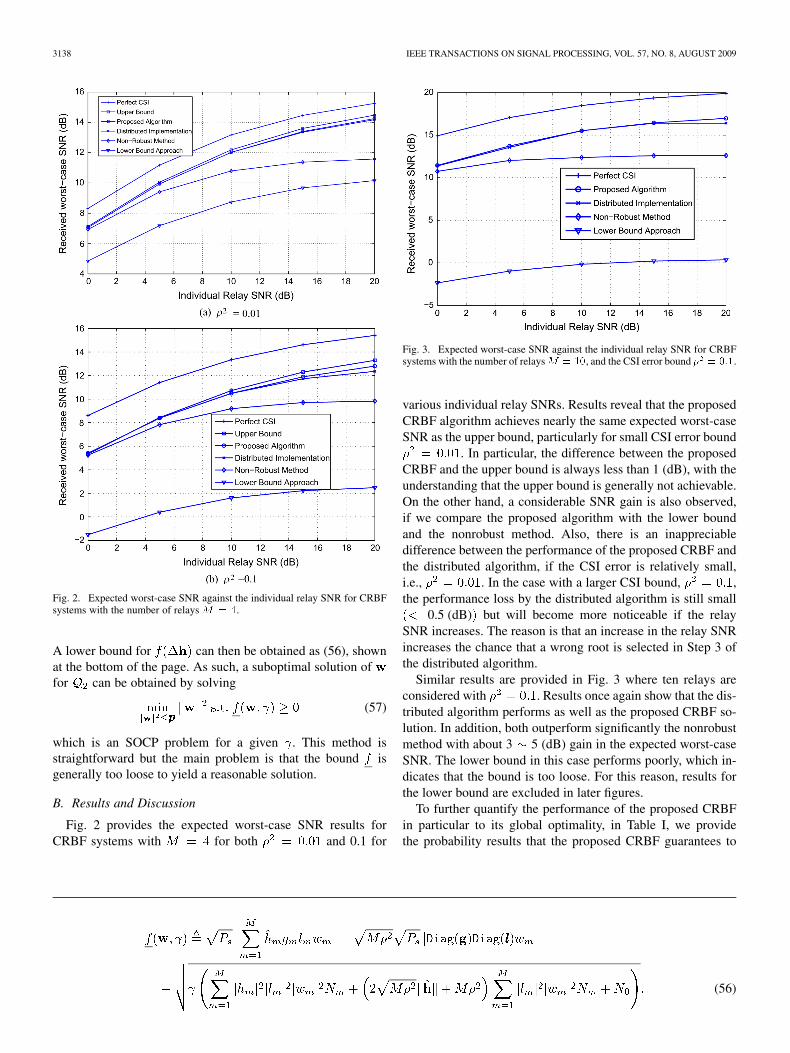
Fig. 2. Expected worst-case SNR against the individual relay SNR for CRBFsystems with the number of relays � � �.
A lower bound for can then be obtained as (56), shownat the bottom of the page. As such, a suboptimal solution offor can be obtained by solving
(57)
which is an SOCP problem for a given . This method isstraightforward but the main problem is that the bound isgenerally too loose to yield a reasonable solution.
B. Results and Discussion
Fig. 2 provides the expected worst-case SNR results forCRBF systems with for both and 0.1 for
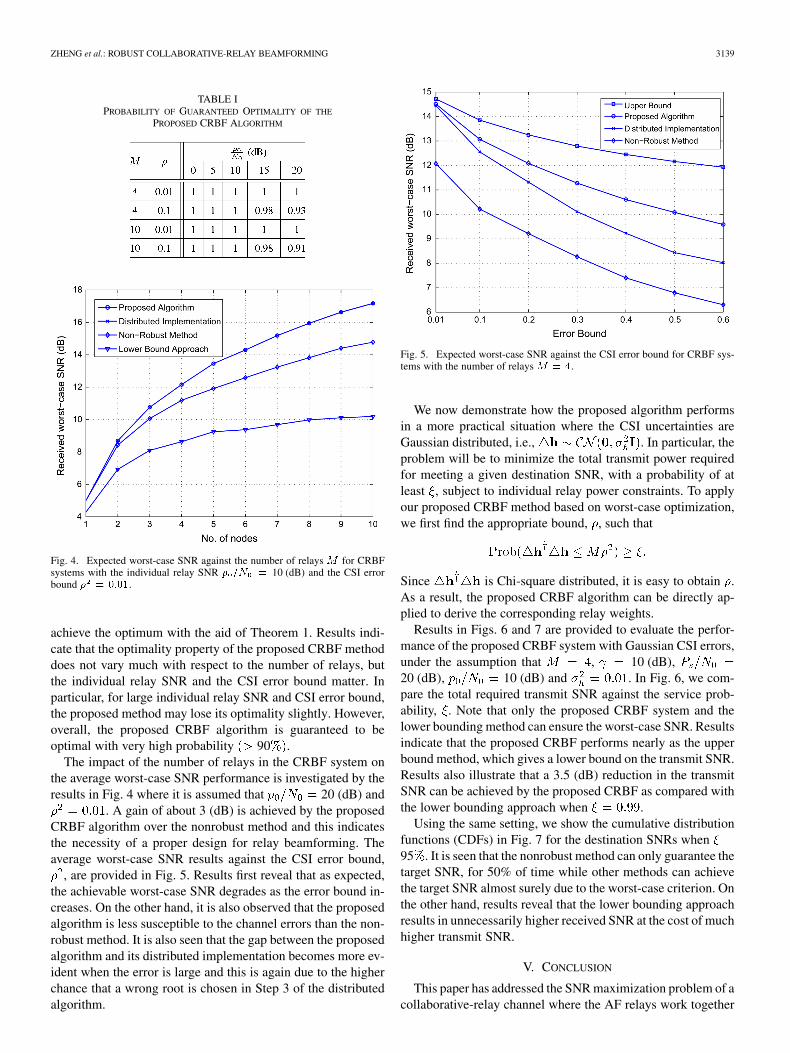
Fig. 3. Expected worst-case SNR against the individual relay SNR for CRBFsystems with the number of relays� � ��, and the CSI error bound � � ���.
various individual relay SNRs. Results reveal that the proposedCRBF algorithm achieves nearly the same expected worst-caseSNR as the upper bound, particularly for small CSI error bound
. In particular, the difference between the proposedCRBF and the upper bound is always less than 1 (dB), with theunderstanding that the upper bound is generally not achievable.On the other hand, a considerable SNR gain is also observed,if we compare the proposed algorithm with the lower boundand the nonrobust method. Also, there is an inappreciabledifference between the performance of the proposed CRBF andthe distributed algorithm, if the CSI error is relatively small,i.e., . In the case with a larger CSI bound, ,the performance loss by the distributed algorithm is still small
0.5 (dB) but will become more noticeable if the relaySNR increases. The reason is that an increase in the relay SNRincreases the chance that a wrong root is selected in Step 3 ofthe distributed algorithm.
Similar results are provided in Fig. 3 where ten relays areconsidered with . Results once again show that the dis-tributed algorithm performs as well as the proposed CRBF so-lution. In addition, both outperform significantly the nonrobustmethod with about 3 5 (dB) gain in the expected worst-caseSNR. The lower bound in this case performs poorly, which in-dicates that the bound is too loose. For this reason, results forthe lower bound are excluded in later figures.
To further quantify the performance of the proposed CRBFin particular to its global optimality, in Table I, we providethe probability results that the proposed CRBF guarantees to
(56)
ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3139
TABLE IPROBABILITY OF GUARANTEED OPTIMALITY OF THE
PROPOSED CRBF ALGORITHM
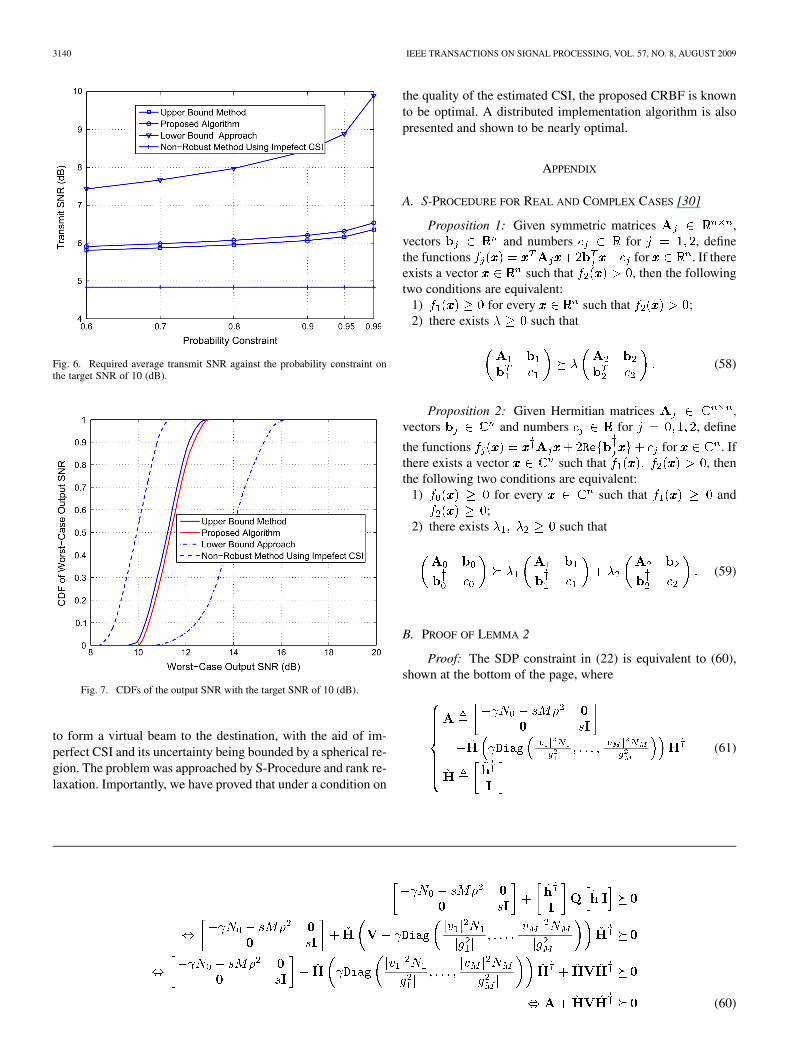
Fig. 4. Expected worst-case SNR against the number of relays � for CRBFsystems with the individual relay SNR � �� � 10 (dB) and the CSI errorbound � � ����.
achieve the optimum with the aid of Theorem 1. Results indi-cate that the optimality property of the proposed CRBF methoddoes not vary much with respect to the number of relays, butthe individual relay SNR and the CSI error bound matter. Inparticular, for large individual relay SNR and CSI error bound,the proposed method may lose its optimality slightly. However,overall, the proposed CRBF algorithm is guaranteed to beoptimal with very high probability 90 .
The impact of the number of relays in the CRBF system onthe average worst-case SNR performance is investigated by theresults in Fig. 4 where it is assumed that 20 (dB) and
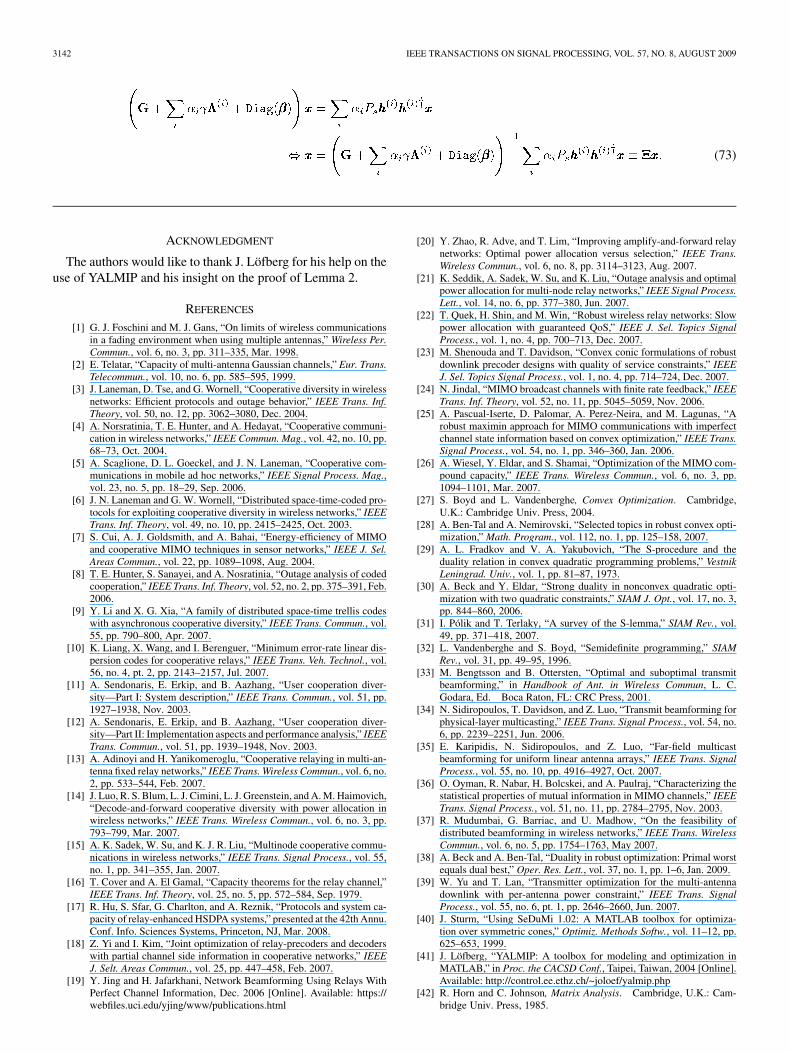
. A gain of about 3 (dB) is achieved by the proposedCRBF algorithm over the nonrobust method and this indicatesthe necessity of a proper design for relay beamforming. Theaverage worst-case SNR results against the CSI error bound,
, are provided in Fig. 5. Results first reveal that as expected,the achievable worst-case SNR degrades as the error bound in-creases. On the other hand, it is also observed that the proposedalgorithm is less susceptible to the channel errors than the non-robust method. It is also seen that the gap between the proposedalgorithm and its distributed implementation becomes more ev-ident when the error is large and this is again due to the higherchance that a wrong root is chosen in Step 3 of the distributedalgorithm.
Fig. 5. Expected worst-case SNR against the CSI error bound for CRBF sys-tems with the number of relays � � �.
We now demonstrate how the proposed algorithm performsin a more practical situation where the CSI uncertainties areGaussian distributed, i.e., . In particular, theproblem will be to minimize the total transmit power requiredfor meeting a given destination SNR, with a probability of atleast , subject to individual relay power constraints. To applyour proposed CRBF method based on worst-case optimization,we first find the appropriate bound, , such that
Since is Chi-square distributed, it is easy to obtain .As a result, the proposed CRBF algorithm can be directly ap-plied to derive the corresponding relay weights.
Results in Figs. 6 and 7 are provided to evaluate the perfor-mance of the proposed CRBF system with Gaussian CSI errors,under the assumption that , 10 (dB),20 (dB), 10 (dB) and . In Fig. 6, we com-pare the total required transmit SNR against the service prob-ability, . Note that only the proposed CRBF system and thelower bounding method can ensure the worst-case SNR. Resultsindicate that the proposed CRBF performs nearly as the upperbound method, which gives a lower bound on the transmit SNR.Results also illustrate that a 3.5 (dB) reduction in the transmitSNR can be achieved by the proposed CRBF as compared withthe lower bounding approach when .
Using the same setting, we show the cumulative distributionfunctions (CDFs) in Fig. 7 for the destination SNRs when95 . It is seen that the nonrobust method can only guarantee thetarget SNR, for 50% of time while other methods can achievethe target SNR almost surely due to the worst-case criterion. Onthe other hand, results reveal that the lower bounding approachresults in unnecessarily higher received SNR at the cost of muchhigher transmit SNR.
V. CONCLUSION
This paper has addressed the SNR maximization problem of acollaborative-relay channel where the AF relays work together
3140 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
Fig. 6. Required average transmit SNR against the probability constraint onthe target SNR of 10 (dB).
Fig. 7. CDFs of the output SNR with the target SNR of 10 (dB).
to form a virtual beam to the destination, with the aid of im-perfect CSI and its uncertainty being bounded by a spherical re-gion. The problem was approached by S-Procedure and rank re-laxation. Importantly, we have proved that under a condition on
the quality of the estimated CSI, the proposed CRBF is knownto be optimal. A distributed implementation algorithm is alsopresented and shown to be nearly optimal.
APPENDIX
A. S-PROCEDURE FOR REAL AND COMPLEX CASES [30]
Proposition 1: Given symmetric matrices ,vectors and numbers for , definethe functions for . If thereexists a vector such that , then the followingtwo conditions are equivalent:
1) for every such that ;2) there exists such that
(58)
Proposition 2: Given Hermitian matrices ,vectors and numbers for , define
the functions for . Ifthere exists a vector such that , thenthe following two conditions are equivalent:
1) for every such that and;
2) there exists such that
(59)
B. PROOF OF LEMMA 2
Proof: The SDP constraint in (22) is equivalent to (60),shown at the bottom of the page, where
(61)
(60)

ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3141
are real. Next, we show that the optimal should also be real.Suppose that where and
, then
(62)
This is stricter than . Thus, given a complex, we can always find a real that meets all the con-
straints and with the same objective value.
C. PROOF OF LEMMA 3
Proof: Using S-Procedure for the complex case, it is easilyshown that
(63)
Therefore, given an arbitrary with , therealways exist real vectors and achieving, respectively,and and that
(64)
Based on and , we can construct another real vector
(65)
which satisfies. Now, define the function
(66)
As is a quadratic function of , and
(67)
there must have at least one root in such that .This means that there is always a real for achieving an arbitrary
for .
D. PROOF OF LEMMA 4
Proof: In (30), given the CSI estimate and theerror bound , there are infinitely many possible channel real-izations (indexed by ), , which give rise to
(68)
with a corresponding (real) CSI error for the realiza-tion. Then, define the matrices
(69)
so that we can rewrite (30) as (70), shown at the bottom of thepage. Since , we have . Now, rewrite the SDPrelaxation (28) as follows.
(71)
Due to the rank relaxation, (71) in general gives a lower boundfor (30). However, we are about to prove that (71) always givesa rank-1 solution, and thus the optimal solution for (71) is alsooptimal for (30). This proof starts from the dual problem of (71),i.e.,
(72)
Without loss of generality, suppose that the optimal solutionof (71) is , with . Due to thecomplementary condition, each should lie in the null spaceof . In addition, should be unique up to its norm. This canbe shown by the following. Given a vector , which lies in thenull space of , we have , which implies (73), shown atthe top of the next page. Because and are all positivediagonal matrices and , is a positive matrix, and isthe eigenvector of associated with the positive eigenvalue 1.According to Perron–Frobenius theorem [42], there is a uniquepositive eigenvalue which is associated with a unique positiveeigenvector, so is unique up to its norm. This implies that (71)must have a positive rank-1 solution and optimal for (30).
(70)
3142 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 8, AUGUST 2009
(73)
ACKNOWLEDGMENT
The authors would like to thank J. Löfberg for his help on theuse of YALMIP and his insight on the proof of Lemma 2.
REFERENCES
[1] G. J. Foschini and M. J. Gans, “On limits of wireless communicationsin a fading environment when using multiple antennas,” Wireless Per.Commun., vol. 6, no. 3, pp. 311–335, Mar. 1998.
[2] E. Telatar, “Capacity of multi-antenna Gaussian channels,” Eur. Trans.Telecommun., vol. 10, no. 6, pp. 585–595, 1999.
[3] J. Laneman, D. Tse, and G. Wornell, “Cooperative diversity in wirelessnetworks: Efficient protocols and outage behavior,” IEEE Trans. Inf.Theory, vol. 50, no. 12, pp. 3062–3080, Dec. 2004.
[4] A. Norsratinia, T. E. Hunter, and A. Hedayat, “Cooperative communi-cation in wireless networks,” IEEE Commun. Mag., vol. 42, no. 10, pp.68–73, Oct. 2004.
[5] A. Scaglione, D. L. Goeckel, and J. N. Laneman, “Cooperative com-munications in mobile ad hoc networks,” IEEE Signal Process. Mag.,vol. 23, no. 5, pp. 18–29, Sep. 2006.
[6] J. N. Laneman and G. W. Wornell, “Distributed space-time-coded pro-tocols for exploiting cooperative diversity in wireless networks,” IEEETrans. Inf. Theory, vol. 49, no. 10, pp. 2415–2425, Oct. 2003.
[7] S. Cui, A. J. Goldsmith, and A. Bahai, “Energy-efficiency of MIMOand cooperative MIMO techniques in sensor networks,” IEEE J. Sel.Areas Commun., vol. 22, pp. 1089–1098, Aug. 2004.
[8] T. E. Hunter, S. Sanayei, and A. Nosratinia, “Outage analysis of codedcooperation,” IEEE Trans. Inf. Theory, vol. 52, no. 2, pp. 375–391, Feb.2006.
[9] Y. Li and X. G. Xia, “A family of distributed space-time trellis codeswith asynchronous cooperative diversity,” IEEE Trans. Commun., vol.55, pp. 790–800, Apr. 2007.
[10] K. Liang, X. Wang, and I. Berenguer, “Minimum error-rate linear dis-persion codes for cooperative relays,” IEEE Trans. Veh. Technol., vol.56, no. 4, pt. 2, pp. 2143–2157, Jul. 2007.
[11] A. Sendonaris, E. Erkip, and B. Aazhang, “User cooperation diver-sity—Part I: System description,” IEEE Trans. Commun., vol. 51, pp.1927–1938, Nov. 2003.
[12] A. Sendonaris, E. Erkip, and B. Aazhang, “User cooperation diver-sity—Part II: Implementation aspects and performance analysis,” IEEETrans. Commun., vol. 51, pp. 1939–1948, Nov. 2003.
[13] A. Adinoyi and H. Yanikomeroglu, “Cooperative relaying in multi-an-tenna fixed relay networks,” IEEE Trans. Wireless Commun., vol. 6, no.2, pp. 533–544, Feb. 2007.
[14] J. Luo, R. S. Blum, L. J. Cimini, L. J. Greenstein, and A. M. Haimovich,“Decode-and-forward cooperative diversity with power allocation inwireless networks,” IEEE Trans. Wireless Commun., vol. 6, no. 3, pp.793–799, Mar. 2007.
[15] A. K. Sadek, W. Su, and K. J. R. Liu, “Multinode cooperative commu-nications in wireless networks,” IEEE Trans. Signal Process., vol. 55,no. 1, pp. 341–355, Jan. 2007.
[16] T. Cover and A. El Gamal, “Capacity theorems for the relay channel,”IEEE Trans. Inf. Theory, vol. 25, no. 5, pp. 572–584, Sep. 1979.
[17] R. Hu, S. Sfar, G. Charlton, and A. Reznik, “Protocols and system ca-pacity of relay-enhanced HSDPA systems,” presented at the 42th Annu.Conf. Info. Sciences Systems, Princeton, NJ, Mar. 2008.
[18] Z. Yi and I. Kim, “Joint optimization of relay-precoders and decoderswith partial channel side information in cooperative networks,” IEEEJ. Selt. Areas Commun., vol. 25, pp. 447–458, Feb. 2007.
[19] Y. Jing and H. Jafarkhani, Network Beamforming Using Relays WithPerfect Channel Information, Dec. 2006 [Online]. Available: https://webfiles.uci.edu/yjing/www/publications.html
[20] Y. Zhao, R. Adve, and T. Lim, “Improving amplify-and-forward relaynetworks: Optimal power allocation versus selection,” IEEE Trans.Wireless Commun., vol. 6, no. 8, pp. 3114–3123, Aug. 2007.
[21] K. Seddik, A. Sadek, W. Su, and K. Liu, “Outage analysis and optimalpower allocation for multi-node relay networks,” IEEE Signal Process.Lett., vol. 14, no. 6, pp. 377–380, Jun. 2007.
[22] T. Quek, H. Shin, and M. Win, “Robust wireless relay networks: Slowpower allocation with guaranteed QoS,” IEEE J. Sel. Topics SignalProcess., vol. 1, no. 4, pp. 700–713, Dec. 2007.
[23] M. Shenouda and T. Davidson, “Convex conic formulations of robustdownlink precoder designs with quality of service constraints,” IEEEJ. Sel. Topics Signal Process., vol. 1, no. 4, pp. 714–724, Dec. 2007.
[24] N. Jindal, “MIMO broadcast channels with finite rate feedback,” IEEETrans. Inf. Theory, vol. 52, no. 11, pp. 5045–5059, Nov. 2006.
[25] A. Pascual-Iserte, D. Palomar, A. Perez-Neira, and M. Lagunas, “Arobust maximin approach for MIMO communications with imperfectchannel state information based on convex optimization,” IEEE Trans.Signal Process., vol. 54, no. 1, pp. 346–360, Jan. 2006.
[26] A. Wiesel, Y. Eldar, and S. Shamai, “Optimization of the MIMO com-pound capacity,” IEEE Trans. Wireless Commun., vol. 6, no. 3, pp.1094–1101, Mar. 2007.
[27] S. Boyd and L. Vandenberghe, Convex Optimization. Cambridge,U.K.: Cambridge Univ. Press, 2004.
[28] A. Ben-Tal and A. Nemirovski, “Selected topics in robust convex opti-mization,” Math. Program., vol. 112, no. 1, pp. 125–158, 2007.
[29] A. L. Fradkov and V. A. Yakubovich, “The S-procedure and theduality relation in convex quadratic programming problems,” VestnikLeningrad. Univ., vol. 1, pp. 81–87, 1973.
[30] A. Beck and Y. Eldar, “Strong duality in nonconvex quadratic opti-mization with two quadratic constraints,” SIAM J. Opt., vol. 17, no. 3,pp. 844–860, 2006.
[31] I. Pólik and T. Terlaky, “A survey of the S-lemma,” SIAM Rev., vol.49, pp. 371–418, 2007.
[32] L. Vandenberghe and S. Boyd, “Semidefinite programming,” SIAMRev., vol. 31, pp. 49–95, 1996.
[33] M. Bengtsson and B. Ottersten, “Optimal and suboptimal transmitbeamforming,” in Handbook of Ant. in Wireless Commun, L. C.Godara, Ed. Boca Raton, FL: CRC Press, 2001.
[34] N. Sidiropoulos, T. Davidson, and Z. Luo, “Transmit beamforming forphysical-layer multicasting,” IEEE Trans. Signal Process., vol. 54, no.6, pp. 2239–2251, Jun. 2006.
[35] E. Karipidis, N. Sidiropoulos, and Z. Luo, “Far-field multicastbeamforming for uniform linear antenna arrays,” IEEE Trans. SignalProcess., vol. 55, no. 10, pp. 4916–4927, Oct. 2007.
[36] O. Oyman, R. Nabar, H. Bolcskei, and A. Paulraj, “Characterizing thestatistical properties of mutual information in MIMO channels,” IEEETrans. Signal Process., vol. 51, no. 11, pp. 2784–2795, Nov. 2003.
[37] R. Mudumbai, G. Barriac, and U. Madhow, “On the feasibility ofdistributed beamforming in wireless networks,” IEEE Trans. WirelessCommun., vol. 6, no. 5, pp. 1754–1763, May 2007.
[38] A. Beck and A. Ben-Tal, “Duality in robust optimization: Primal worstequals dual best,” Oper. Res. Lett., vol. 37, no. 1, pp. 1–6, Jan. 2009.
[39] W. Yu and T. Lan, “Transmitter optimization for the multi-antennadownlink with per-antenna power constraint,” IEEE Trans. SignalProcess., vol. 55, no. 6, pt. 1, pp. 2646–2660, Jun. 2007.
[40] J. Sturm, “Using SeDuMi 1.02: A MATLAB toolbox for optimiza-tion over symmetric cones,” Optimiz. Methods Softw., vol. 11–12, pp.625–653, 1999.
[41] J. Löfberg, “YALMIP: A toolbox for modeling and optimization inMATLAB,” in Proc. the CACSD Conf., Taipei, Taiwan, 2004 [Online].Available: http://control.ee.ethz.ch/~joloef/yalmip.php
[42] R. Horn and C. Johnson, Matrix Analysis. Cambridge, U.K.: Cam-bridge Univ. Press, 1985.

ZHENG et al.: ROBUST COLLABORATIVE-RELAY BEAMFORMING 3143
Gan Zheng (S’05–M’09) received the B.Eng. andM.Eng. degrees from Tianjin University, China, in2002 and 2004, respectively, both in electronic andinformation engineering and the Ph.D. degree in elec-trical and electronic engineering from The Universityof Hong Kong, Hong Kong, in 2008.
He has been working as a Research Associate atUniversity College London since December 2007.His research interests are in the general area ofsignal processing for wireless communications, withparticular emphasis on the design, optimization,
and analysis for multiuser multiple-input multiple-output (MIMO) antennasystems, cooperative network and cognitive radio.
Kai-Kit Wong (S’98–M’01–SM’08) received theB.Eng., the M.Phil., and the Ph.D. degrees, all inelectrical and electronic engineering, from the HongKong University of Science and Technology, HongKong, in 1996, 1998, and 2001, respectively.
After graduation, he joined the Department ofElectrical and Electronic Engineering, the Universityof Hong Kong as a Research Assistant Professor.From July 2003 to December 2003, he visited theWireless Communications Research Department ofLucent Technologies, Bell-Labs, Holmdel, NJ, as
a Visiting Research Scholar. After that, he then joined the Smart AntennasResearch Group of Stanford University, Stanford, CA, as a Visiting AssistantProfessor. From 2005 to August 2006, he was a Lecturer with the Departmentof Engineering, the University of Hull, U.K. Since August 2006, he has beena Senior Lecturer with University College London.
Dr. Wong is also on the editorial board of the IEEE TRANSACTIONS ON
WIRELESS COMMUNICATIONS. He won the IEEE Vehicular Technology SocietyJapan Chapter Award of the International IEEE Vehicular Technology Confer-ence—Spring 2000, and was also a co-recipient of the First Prize Paper Awardin the IEEE Signal Processing Society Postgraduate Forum Hong Kong Chapterin 2004. In 2002 and 2003, he received, respectively, the SY King Fellowshipsand the WS Leung Fellowships from the University of Hong Kong. Also, hewas awarded the Competitive Earmarked Research Grant Merit and IncentiveAwards in 2003–2004.
Arogyaswami Paulraj (SM’85–F’91) received thePh.D. degree from the Indian Institute of Technology,New Delhi, in 1973.
Currently, he is a Professor with the Departmentof Electrical Engineering, Stanford University,Stanford, CA, where he supervises the Smart An-tennas Research Group, working on applicationsof space-time techniques for wireless communi-cations. His nonacademic positions have includedHead of the Sonar Division, Naval OceanographicLaboratory, Cochin, India; the Director of the Center
for Artificial Intelligence and Robotics, India; the Director of the Center forDevelopment of Advanced Computing, India; the Chief Scientist of BharatElectronics, India; Chief Technology Officer (CTO) and Founder of IospanWireless, Inc.; Co-Founder and CTO of Beceem Communications Inc. Heis the author of over 300 research papers and holds 20 patents. His researchhas spanned several disciplines, emphasizing estimation theory, sensor signalprocessing, parallel computer architectures/algorithms, and space-time wirelesscommunications. His engineering experience has included development ofsonar systems, massively parallel computers, and broadband wireless systems.
Dr. Paulraj is a Member of the Indian National Academy of Engineering. Hehas won several awards for his research and engineering contributions, includingthe IEEE Signal Processing Society’s Technical Achievement Award.
Björn Ottersten (F’04) was born in Stockholm,Sweden, 1961. He received the M.S. degree inelectrical engineering and applied physics fromLinköping University, Linköping, Sweden, in 1986and the Ph.D. degree in electrical engineering fromStanford University, Stanford, CA, in 1989.
He has held research positions at the Departmentof Electrical Engineering, Linköping University;the Information Systems Laboratory, StanfordUniversity; and the Katholieke Universiteit Leuven,Leuven. During 1996–1997, he was Director of
Research at ArrayComm, Inc., San Jose, CA, a start-up company based onOttersten’s patented technology. He is also Director of security andtrust.lu atthe University of Luxembourg. He is a first recipient of the European ResearchCouncil advanced research grant. His research interests include wirelesscommunications, stochastic signal processing, sensor array processing, andtime series analysis.
Dr. Ottersten has coauthored papers that received an IEEE Signal ProcessingSociety Best Paper Award in 1993, 2001, and 2006. In 1991 he was appointedProfessor of Signal Processing at the Royal Institute of Technology (KTH),Stockholm. From 2004 to 2008, he was Dean of the School of Electrical En-gineering at KTH, and from 1992 to 2004, he was head of the Department forSignals, Sensors, and Systems at KTH. He has served as Associate Editor forthe IEEE TRANSACTIONS ON SIGNAL PROCESSING and on the Editorial Boardof the IEEE Signal Processing Magazine. He is currently Editor-in-Chief ofthe EURASIP Signal Processing Journal and a member of the Editorial Boardof the EURASIP Journal of Applied Signal Processing. He is a Fellow of theEURASIP.