research on morphology specificity of gecko feet at different scales
TRANSCRIPT

Research on Morphology Specificity of Gecko Feet at Different Scales
Lei CAI1,2,a, Hao MEI1,2, Wenbo WANG1, Hao WANG1 and Zhendong DAI1,*,b
1Institute of Bio-inspired Structure and Surface Engineering, Nanjing University of Aeronautics and
Astronautics, Nanjing 210016, china 2College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and
Astronautics, Nanjing 210016, china aemail: [email protected], bemail: [email protected]
*corresponding author: Zhendong DAI
Keywords: Gekko gecko; foot; toes; setae lamella; area
Abstract: The fine-level structure of toes contributes to the extraordinary climbing ability of G.
gecko. Research on the morphology specificity of gecko feet at different scales provides anatomical
information for revealing gecko’s motor ability and provides theoretical basis and data which can
support the development of the robot gecko feet. During the research, we used KEYENCE
(VHX-600E) digital microscope system to observe and photograph the forefoot and hindfoot of G.
gecko at different scales. The image processing as well as calculation of foot area and toe area was
done using image processing software after the number of toe setae lamella was counted. Results:
there was no significant difference between the numbers of setae lamellae on the first toes in both
forefoot and hindfoot (p>0.3). The same situation also appeared in the second and forth toes.
The numbers of the third and the fifth toe setae lamella in forefoot are significantly different from
the corresponding ones in hindfoot (p<0.01), the difference between the whole area of the forefoot
and hindfoot was more significant (p<0.005). The area of the first toe in forefoot was different from
the corresponding one in hindfoot (p<0.05), while the areas of the other four toes were more
different from the corresponding ones in hindfoot (p<0.005). The results of the research suggest that
specific designs should be adopted in the devisal of forefoot and hindfoot as well as the
corresponding toes.
Introduction
The extraordinary climbing ability of geckos is considered a remarkable design of nature that is
attributed to the fine structure of its toes [1]
. The fine structure of toes [2-4]
as well as the mechanism
hidden below the adhesive capacity of setae array [5-8]
has greatly attracted researchers. The
meaningful research on the adhesion property of gecko setae conducted by Autumn has injected
new vitality to this field [6]
. Guo et al. has found the hierarchical innervations of G. gecko’s toes to
motion and reception [9]
. Meanwhile, the research on behavior and dynamics of gecko’s locomotion
provides a source of inspiration in mechanism design and gait planning of robot gecko [10-14]
. All
those work have improved the study of robot gecko rapidly. The researchers of Carnegie Mellon
University developed gecko robot “Geckobot” which can climb up to 85 ° stably on the Plexiglas
surfaces. The feet of “Geckobot” are made by eight Polydimethyl siloxane elastomers which
empower the excellent climbing ability [15]
. With the help of sticky feet, gecko robot “Stickybot”
developed by Stanford University can climb on smooth vertical and even overhanging surfaces [16]
.
Every foot of StickyBot contains four toes; each of them has a 4 cm2 patch of synthetic adhesive
termed directional polymer stalks [17]
. Researchers can regulate the adhesion and detachment
Applied Mechanics and Materials Vol. 461 (2014) pp 284-290Online available since 2013/Nov/21 at www.scientific.net© (2014) Trans Tech Publications, Switzerlanddoi:10.4028/www.scientific.net/AMM.461.284
All rights reserved. No part of contents of this paper may be reproduced or transmitted in any form or by any means without the written permission of TTP,www.ttp.net. (ID: 218.94.136.173-24/11/13,14:48:43)

processes by controlling the hamstring of the toes. Although the performance of the robot gecko has
improved significantly, the robustness as well as the flexibility of movement of gecko robot is still
far behind the real gecko. When designed the gecko robot feet, researchers imitated the toe-like
structure and characteristics of the lamellae of the real gecko feet. However the differences between
the forefoot and hindfoot; morphological differences between the toes; local specificities such as
directions of setae in different locations of the toe had not been reflected in the design. Those robot
feet are lack of structural diversity and the stiffness of feet was too high which maybe limit the full
contact of the toe ventral viscous material with the contact surface. So those feet have a low
adaptability to different surface roughness. The design of robot gecko feet has become one of the
key constraints in the research of robot gecko. This study aims to providing theoretical basis and
guidance for the design of robot gecko feet by researching morphology specificity of the gecko feet
at different scales.
Materials and methods:
Animals:
Five geckos, (Gekko gecko (Linnaeus, 1785)), were used in this study (body weight: 55.1 ± 11.9
g, body length (snout to vent): 146.6 ± 5.7 mm, mean ± s.d.). All the geckos were purchased from
Nanning, Guangxi Zhuang Autonomous Region of China, and were raised in the animal room under
simulated the original environment with fresh water and live insects as food, and kept on a natural
light cycle.
Animal Anesthetize and Fix
G. gecko was anesthetized by intraperitoneal injection of pentobarbital sodium (30 mg/kg). After
the gecko was fully anesthetized (there was no grip reaction when touched the skin and the pain
reflection disappeared) then gecko was supine fixed, toes back were fixed to the dissecting dish
with a double-sided adhesive, gecko toes was naturally straight state.
Microscopic Observation and Area Calculation
The right forefoot and left hindfoot of G. gecko were observed and pictures of those parts were
taken using KEYENCE (VHX-600E) Digital Microscope System. G. gecko toe area was defined as
the entire toe area covered by setae lamella and the setae lamella was defined as the consecutive
setae coverage area where the major axis and the minor axis ratio ≥3. By magnifying 800 times of
the feet, we found that in the ventral part of gecko toes, besides the defined setae lamella there were
also setae in protuberance located in proximal end of the toe adjacent to setae lamella. To facilitate
the statistical analysis, the protuberances were not counted. The number of setae lamella was
counted and the whole feet, toes, toe locals were observed and taken pictures respectively to study
the specificity of fine structure in different positions of the feet. The rough contours of the feet as
well as the corresponding toes were then depicted and the areas of those parts were calculated. The
numbers and areas of setae lamellae in forefoot and hindfoot as well as in corresponding toes were
statistically analyzed using SPSS 10.0 and GraphPad Prism V5.01. All of the tested data were
presented as means ± standard deviations (mean ± s.d.).
Results:
Differences in Number and Morphology of Setae Lamella between Forefoot and Hindfoot
According to the definition of the gecko setae lamella, the number of setae lamella in the right
forefoot and the left hindfoot (n = 5) was counted, results shown in table 1. There is no claw in the
first toe of right forefoot (Fig. 1A) of gecko and there are 16.4 ± 0.55 setae lamellae on it. The
Applied Mechanics and Materials Vol. 461 285

numbers of the setae lamellae on second, third, forth, fifth toe are respectively 18.2 ± 1.10, 20.0 ±
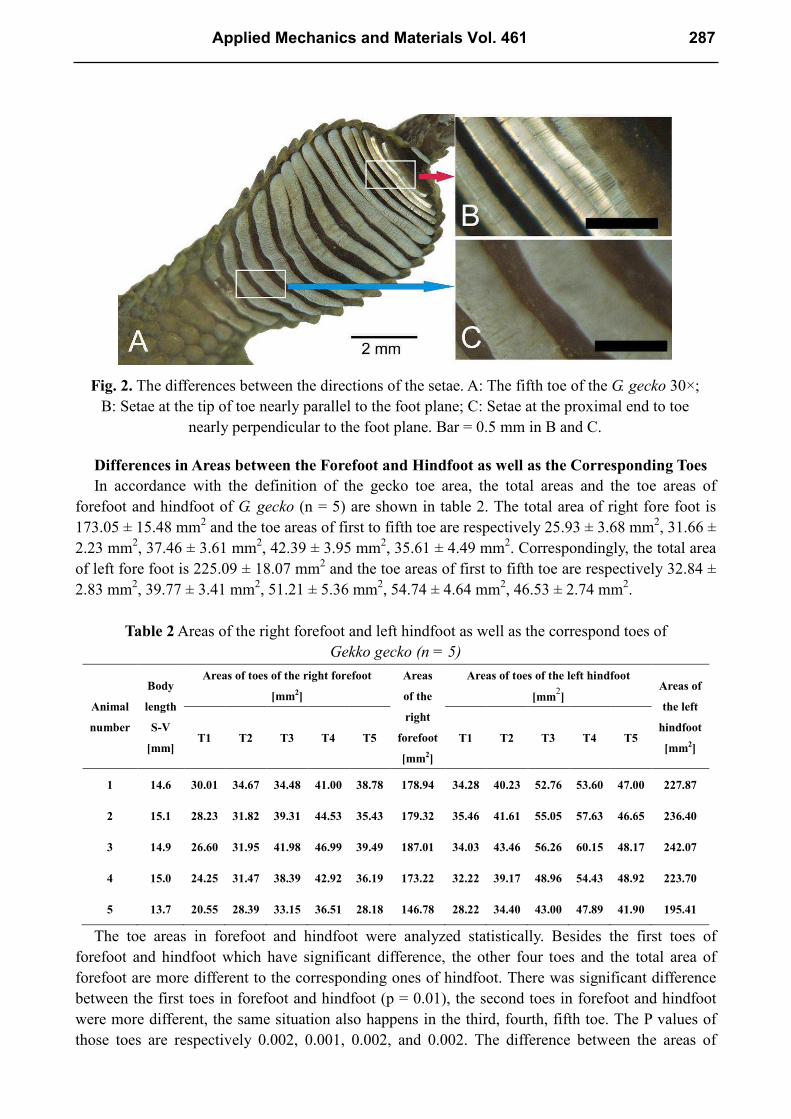
0.71, 22.2 ± 0.84, and 18.2 ± 0.45. The directions of setae on different setae lamellae are different.
The setae on the proximal setae lamellae are almost perpendicular to the feet. In the telecentric setae
lamellae the setae grow to the center gradually. The setae in the toe tips are nearly parallel with
ventral part of the toe. In different toes, the numbers of the lamellae where setae grow centripetally
were very different (shown in Fig. 2).
Table 1 Lamella number of the right forefoot and left hindfoot as well as the correspond toes of
G. gecko (n = 5)
On the first toe of left hindfoot (Fig. 1B) there is no claw too and there are 16.6 ± 0.55 setae
lamellae. The second, third, forth, fifth toe respectively have 18.4 ± 0.89, 22.0 ± 1.00, 22.6 ± 0.55,
20.2 ± 0.84 setae lamellae. The statistic analysis of the setae lamellae number on different toes
suggests that there was no significant difference between the first toes in forefoot and hindfoot. The
same situation also happens in the second, fourth toe (p>0.3); the numbers of the third and the fifth
toe setae lamella in forefoot are significantly different from the corresponding ones in hindfoot
(p<0.01). The numbers of total setae lamellae in forefoot and hindfoot are different (p = 0.022).
Anima
number
Body
weight
[g]
Body
length
S-V
[mm]
Lamella number of toes of the
right forefoot
Total
number of
the right
forefoot
Lamella number of toes of the left
hindfoot Total number
of the left
hindfoot T1 T2 T3 T4 T5 T1 T2 T3 T4 T5
1 59.2 14.6 16 18 19 22 18 93 16 18 21 22 20 97
2 70.6 15.1 17 18 20 23 18 96 17 18 23 23 20 101
3 59.6 14.9 17 17 20 21 18 93 17 18 22 23 19 99
4 42.6 15.0 16 18 20 22 18 94 16 18 21 22 21 98
5 43.4 13.7 16 20 21 23 19 99 17 20 23 23 21 104
Fig. 1. The ventral view of the forefoot and hindfoot of G. gecko. T1, T2, T3, T4, T5 is the first
to fifth toes. A: Right forefoot of G. gecko; B: Left hindfoot of G. gecko.
286 Advances in Bionic Engineering
Differences in Areas between the Forefoot and Hindfoot as well as the Corresponding Toes
In accordance with the definition of the gecko toe area, the total areas and the toe areas of
forefoot and hindfoot of G. gecko (n = 5) are shown in table 2. The total area of right fore foot is
173.05 ± 15.48 mm2 and the toe areas of first to fifth toe are respectively 25.93 ± 3.68 mm
2, 31.66 ±
2.23 mm2, 37.46 ± 3.61 mm
2, 42.39 ± 3.95 mm
2, 35.61 ± 4.49 mm
2. Correspondingly, the total area
of left fore foot is 225.09 ± 18.07 mm2 and the toe areas of first to fifth toe are respectively 32.84 ±
2.83 mm2, 39.77 ± 3.41 mm
2, 51.21 ± 5.36 mm
2, 54.74 ± 4.64 mm
2, 46.53 ± 2.74 mm
2.
Table 2 Areas of the right forefoot and left hindfoot as well as the correspond toes of
Gekko gecko (n = 5)
The toe areas in forefoot and hindfoot were analyzed statistically. Besides the first toes of
forefoot and hindfoot which have significant difference, the other four toes and the total area of
forefoot are more different to the corresponding ones of hindfoot. There was significant difference
between the first toes in forefoot and hindfoot (p = 0.01), the second toes in forefoot and hindfoot
were more different, the same situation also happens in the third, fourth, fifth toe. The P values of
those toes are respectively 0.002, 0.001, 0.002, and 0.002. The difference between the areas of
Animal
number
Body
length
S-V
[mm]
Areas of toes of the right forefoot
[mm2]
Areas
of the
right
forefoot
[mm2]
Areas of toes of the left hindfoot
[mm2]
Areas of
the left
hindfoot
[mm2] T1 T2 T3 T4 T5 T1 T2 T3 T4 T5
1 14.6 30.01 34.67 34.48 41.00 38.78 178.94 34.28 40.23 52.76 53.60 47.00 227.87
2 15.1 28.23 31.82 39.31 44.53 35.43 179.32 35.46 41.61 55.05 57.63 46.65 236.40
3 14.9 26.60 31.95 41.98 46.99 39.49 187.01 34.03 43.46 56.26 60.15 48.17 242.07
4 15.0 24.25 31.47 38.39 42.92 36.19 173.22 32.22 39.17 48.96 54.43 48.92 223.70
5 13.7 20.55 28.39 33.15 36.51 28.18 146.78 28.22 34.40 43.00 47.89 41.90 195.41
Fig. 2. The differences between the directions of the setae. A: The fifth toe of the G. gecko 30×;
B: Setae at the tip of toe nearly parallel to the foot plane; C: Setae at the proximal end to toe
nearly perpendicular to the foot plane. Bar = 0.5 mm in B and C.
Applied Mechanics and Materials Vol. 461 287

forefoot and hindfoot was extremely significant (p = 0.001). The scatter diagram of the result is
shown in Fig. 3.
Discussion
Differences in the Areas of Setae Lamellae between Forefoot and Hindfoot
There is a significant difference in the morphological characteristics between the forefoot and
hindfoot of gecko, this kind of difference is mainly reflected by the corresponding toe contact areas
as well as the numbers of setae lamellae. The morphological specificity of forefoot and hindfoot of
gecko may be related to the different roles they play in motor function. The total area of the
hindfoot and the areas of toes in hindfoot are significantly bigger than the corresponding ones in
forefoot which indicate that the adhesive ability of hindfoot is stronger than the forefoot. The
research on the behavior and kinetics of G. gecko moving in different directions in the vertical plane
found that: during the upward and downward locomotion of G. gecko, the average velocity is
significantly different; the former is 0.33 ± 0.20 m/s when the latter one is 0.55 ± 0.29 m/s. The
force output of the forefoot and hindfoot is also very different. When moved upward, the forefoot
and hindfoot make an equivalent contribution to the driving force, in the downward process, the
hindfoot provide a driving force approximately 3-fold of the forefeet do [13]
. There are relatively
small differences in the number of setae lamellae in forefoot and hindfoot which shows that from
the perspective of flexible control of the movement there is no difference between the forefoot and
hindfoot. G. gecko primarily actives on steep inclined surface or near vertical surface and those
special living habits play a major impact on the evolutionary development of the morphological
structure of the limbs.
Morphological Differences between the Toes
The areas of five toes in one foot can be very different. Generally, the area of the first, second,
third, fourth toes in turn increases; the fourth toe area is the biggest in five ones while the fifth toe
area is between the second and third toe areas. During the locomotion of the G. gecko the fourth toe
Fig. 3. Scatter plot of the
toes areas between the
forefoot and the hindfoot
of G. gecko.
RF: right forefoot,
LH: left hindfoot,
RFT1: first toe of right
forefoot, LHT1: first toe
of left hindfoot.
*: with a significant
difference (p<0.05),
**: with an extremely
significant difference
(p<0.005).
288 Advances in Bionic Engineering

is the farthest away from the body; the third and the fifth toes located on both sides of the fourth toe;
The first toe is the nearest to the body. The toe which is the farthest away from the body has the
biggest area that can provide the greatest force output, while the nearest toe has the smallest area. In
addition, the first toes of forefoot and hindfoot of G. gecko have no claw. The reason for this is that
the first toe is centripetal and the disappearance of the claw can make the toe more fully in contact
with the contact surface and reduce the distance between the body and the contact surface which is
beneficial for adhering to the vertical plane or negative surface.
Differences in Direction Specificity and Length of the Setae
Setae on different setae lamellae which located in different positions of feet have distinct
directions. The setae which are distal to the body grow centripetally while proximal setae are
vertical to the feet. This particular way for setae growing is favor for solid adhesion of G. gecko on
different surfaces, when there is a relatively great variation in elevation between the contact
surfaces and the feet, G. gecko can ensure that there are as many as setae contact with the surfaces.
During the adhesion process on the same surface, the setae grow in different directions just form a
closed contact ring which can enhance the adhesion stability. The directions of setae are different in
different locations of the G. gecko toes, this can provide us a helpful inspiration in the setae array
arrangement when we design the robot gecko feet.
Acknowledgements
I would like to thank Tingting Liu for her help in experimental data processing. This work was
partially supported by the State Key Development Program for Basic Research of China (No.
2011CB302100), National Natural Science Foundation of China (No. 61175105).
References
[1] Y. Tian, N. Pesika, H.B. Zeng, K. Rosenberg, B.X. Zhao, P. McGuiggan, K. Autumn, J.
Israelachvili, Adhesion and friction in gecko toe attachment and detachment, Proc. Natl. Acad. Sci.
USA. 12 (2006) 19320-19325.
[2] A.P. Russell, A contribution to the functional analysis of the foot of the Tokay, Gekko gecko
(Reptilia, Gekkonidae). J. Zool. London. 176 (1975) 437-476.
[3] P.F.A. Maderson, Keratinized epidermal derivatives as an aid to climbing in gekkonid lizards,
Nature. 203, (1964)780-781.
[4] R. Ruibal, V. Ernst, The structure of the digital setae of lizards, J. Morphol. 117 (1965) 271-294.
[5] N.E. Stork, Experimental Analysis of Adhesion of Chrysolina Polita (Chrysomelidae:
Coleoptera) on a Variety of Surfaces, J. Exp. Biol. 88 (1980) 91-107.
[6] K. Autumn, Y.A. Liang, S.T. Hsieh, W. Zesch, W.P. Chan, W.T. Kenny, R. Fearing, R.J. Full,
Adhesive force of a single gecko foot-hair, Nature. 405 (2000) 681-685.
[7] B. Chen, P.D. Wu, H. Gao. Hierarchical modelling of attachment and detachment mechanisms
of gecko toe adhesion. Proc. R. Soc. A., 464 (2008): 1639-1652.
[8] K. Autumn, M. Sitti, Y.A. Liang, A.M. Peattie, W.R. Hansen, S. Sponberg, T.W. Kenny, R.
Fearing, J.N. Israelachvili, R.J. Full, Evidence for van der Waals adhesion in gecko setae, Proc. Natl.
Acad. Sci. USA. 99 (2002) 12252-12256.
[9] C. Guo, L. Cai, H.R. Xie, Z.Y. Wang, Z.D. Dai, J.R. Sun, Divisional and hierarchical
innervations of G. gecko’s toes to motion and reception, Chin. Sci. Bull. 54 (2009) 2880-2887.
[10] D.J. Irschick, B. Vanhooydonck, A. Herrel, A. Andronescu, Effects of loading and size on
maximum power output and gait characteristics in geckos. J. Exp. Biol. 206 (2003) 3923-3934.
Applied Mechanics and Materials Vol. 461 289

[11] K. Autumn, S.T. Hsieh, D.M. Dudek, J. Chen, C. Chitaphan. R.J. Full, Dynamics of geckos
running vertically, J. Exp. Biol. 209 (2006) 260-272.
[12] Z.Y. Wang, W.H. Gu, Q. Wu, A.H. Ji, Z.D. Dai, Morphology and reaction force of toes of
geckos freely moving on ceilings and walls, Sci. China Technol. Sc. 53 (2010) 1688-1693.
[13] Z.Y. Wang, J.T. Wang, A.H. Ji, Y.Y. Zhang, Z.D. Dai, Behavior and dynamics of gecko’s
locomotion: The effects of moving directions on a vertical surface, Chin. Sci. Bull. 56 (2011)
573-583.
[14] Z.D. Dai, Z.Y. Wang, A.H. Ji, Dynamics of gecko locomotion: a force-measuring array to
measure 3D reaction forces, J. Exp. Biol. 214 (2011) 703-708.
[15] O. Unver, A. Uneri, A. Aydemir, M. Sitti, Geckobot: a gecko inspired climbing robot using
elastomer adhesives, In: Proceedings of the 2006 IEEE International Conference on Robotics and
Automation, 2006 May 15-19, Orlando, Florida, USA. IEEE, 2006, 2329-2335.
[16] D. Santos, B. Heyneman, S. Kim, N. Esparza, M.R. Cutkosky, Gecko-inspired climbing
behaviors on vertical and overhanging surfaces, In: Proceedings of the 2008 IEEE International
Conference on Robotics and Automation, 2008 May 19-23, Pasadena, CA, USA. IEEE, 2008,
1125-1131.
[17] D. Santos, S. Kim, M. Spenko, A. Parness, M. Cutkosky, Directional adhesive structures for
controlled climbing on smooth vertical surfaces. In IEEE ICRA, Rome, Italy, 2007, 1262-1267.
290 Advances in Bionic Engineering

Advances in Bionic Engineering 10.4028/www.scientific.net/AMM.461 Research on Morphology Specificity of Gecko Feet at Different Scales 10.4028/www.scientific.net/AMM.461.284