preliminary studies with pvm on a hp-735 cluster and cm-5 for the time dependent solution of the...
TRANSCRIPT

1
PRELIMINARY STUDIES WITH PVM ON A HP-735 CLUSTER AND CM-5
FOR THE TIME DEPENDENT SOLUTION OF THE
INCOMPRESSIBLE NAVIER- STOKES EQUATIONS
- LAPLACE EQUATION
BY
WEICHENG HUANG1
AND
DANESH TAFTI
NATIONAL CENTER FOR SUPERCOMPUTING APPLICATIONS
UNIVERSITY OF ILLINOIS AT URBANA CHAMPAIGN
URBANA, ILLINOIS 61801
JANUARY 1994
1Aeronautical and Astronautical Department, University of Illinois Urbana-Champaign, Urbana, IL 61801.
2
ABSTRACT
A preliminary study was conducted with the message passing library PVM for the
iterative solution of a two-dimensional Laplace equation. A line iterative procedure and
Stone's strongly implicit solution procedure were tested in this environment as they have
direct applicability to the solution of the pressure-Poisson equation. The intent of this
study was not so much to study the solution of the Laplace equation as it was to establish
the necessary groundwork and to understand the issues involved in parallel programming
in a domain-decomposed environment for the incompressible Navier-Stokes equations.
Two machine configurations were looked at in this study, a 6 processor HP-735 cluster at
NCSA and a 512 processor CM-5. There were some differences in the F77 compilers
between the two machines and suitable modifications had to be made in the computer
program. It was found that although the Stone's method did not parallelize as effectively
as the line iterative procedure, it took much less CPU time to give a converged solution.
It was also found that the HP-735 processors performed more uniformly than the CM-5
processing nodes.

3
1. Introduction
The accurate simulation of turbulent flows for complex geometries and large
Reynolds numbers is one of the most challenging applications of massively parallel
processing (MPP) architectures. Turbulence manifests itself in almost all applications of
engineering physics and is a major bottleneck in the accurate representation and
interpretation of flow physics. Computationally, the accurate simulation of such flows
using Reynolds Averaged Navier-Stokes (RANS) is limited by the turbulence models
used. Further, these simulations are often done in a steady or time-independent
framework, which precludes much of the important flow physics. An alternative to the
RANS approach is the Direct Numerical Simulation of turbulence (DNS) in which the full
three-dimensional Navier-Stokes equations are integrated in time to resolve all or most of
the scales of motion present in the flow. Another alternative to DNS is Large-Eddy
Simulation (LES), where explicit models are used to account for the unresolved or subgrid
scales. Both, DNS and LES require a high order of accuracy in resolving the grid scales of
turbulence. Commonly used methods are finite difference discretizations [1], spectral
methods [2] and spectral-element methods [3]. DNS and LES require the resolution of
multiple length and time scales and subsequently require more than ten million degrees of
freedom at moderate Reynolds numbers.
For such large scale computational complexity, scalable parallel processing is
becoming an important tool for scientists and engineers. By coupling together tens to
thousands of distributed processing nodes together by high speed networks, these systems
can be scaled to have GBytes of collective memory and peak processing speeds in the
GFlops to TeraFlops range. These systems can be broadly classified as coarse grained
(tens of processors) versus fine grained (thousands of processors). An example of coarse
grained parallelism is that offered by a heterogeneous network of workstations which are
4
loosely coupled via a network. Fine grained parallelism is evidenced in massively parallel
machines such as the CM-5, where thousands of processing nodes are tightly coupled by a
high speed data network and associated hardware.
The two most commonly used programming paradigms in parallel environments
are the Single Instruction Multiple Data (SIMD) approach (also referred to as the data
parallel mode), and the Multiple Instruction Multiple Data (MIMD) approach which is
also referred to as the message passing mode. In the former, data in each array is laid out
across all the processors and a single instruction acts on all the data simultaneously. In this
environment, the compiler generates the required communication directives between
processing nodes. By using suitable parallel extensions to Fortran 90, this method can be
quite powerful in extracting the inherent parallelism in solution algorithms [4]. Although
this programming paradigm is good for simple data structures which map onto each other
with relative ease, it becomes exceedingly difficult to extract parallel performance as the
data structures become complex and do not conform with each other.
In such instances the message passing programming model is quite useful. In this
model each processing node acts independently of the other with suitable coupling
between processors provided by explicit exchange of information or message passing
between them. This type of parallelism is more coarse grained than that implied by the
data parallel model. In this environment one is not restricted to data parallelism, and
consequently different types of parallelism can be enforced. Parallelism can be functional,
i.e., each or a group of processing nodes can be performing different independent
functions over the same or different calculation domains. Functional parallelism is
inherent in the coupling between inter-disciplinary problems. In fluid-structure interaction,
the functional parallelism would be extracted from the fluid and structure calculation
procedures, which would proceed independently of each other with information exchange

5
occurring when needed. Another example of this would be the post-processing of data
from a time dependent flow calculation. Once data is transferred from the solution module
to the post-processing module, each can proceed with their respective tasks independently
of the other. Parallelism can be also be operator based. An example of this would be the
solution of an elliptic system using a mixed Fourier-finite difference discretization. Each
wave number (or combination of wave numbers) can be assigned to a processing node,
with a tri-diagonal or penta-diagonal system being solved for each combination of wave
number locally to the processing node. The third type of parallelism is based on domain
decomposition [5]. In this type of parallelism, the computational domain itself is
decomposed into sub-domains. Each sub-domain or task is then mapped to a processing
node with each processing node performing computations independently of the others.
In the message passing mode, parallel efficiency is dependent on a number of
factors. The most important is the cost of communications between processing nodes. All
other conditions being the same, function and operator based parallelism involve large
scale global data movement and are seldom cost effective if required to be done
repeatedly. On the other hand domain decomposition seldom involves large scale global
data movement, and only requires message passing between contiguous sub-domain
boundaries. In a three dimensional calculation domain the communications at internal
boundaries between sub-domains are of O(N2) while the computations are of O(N3). To
maintain a favorable ratio between the time spent in computations to communications, the
sub-domains should have a low surface to volume ratio.
Besides having a low communications overhead, domain decomposition fits in
intuitively with the concept of block structured or composite grids in CFD[6]. Similar to
the block structured grids it results in a simplification of complex systems by
decomposing them into smaller parts. There are two basic ways in which domain

6
decomposition can be applied. In the first there exists a small overlap region between each
sub-domain [5]; the boundary of a sub-domain lie in the interior of the other and vice-
versa. This decomposition is particularly useful in iterative methods, where the boundary
values for each sub-domain are obtained from the overlap region at a previous iterate. At
the end of each iteration the overlap regions are updated via message passing to provide
new boundary values for the next iteration. In the other partitioning, the domains do not
have overlap regions and share a common boundary interface [7]. To ensure continuity
between sub-domains, the dependent variables and their respective normal fluxes are
balanced at the boundary interfaces.
In CFD applications the direct inversion of tri- or penta-diagonal is an important
part of the solution procedure. This is often required to be done in an implicit algorithm
[8,9], which requires the solution of linear systems in the different coordinate directions.
In a parallel distributed environment this can be achieved in a number of ways. In one, the
coordinate direction in which the linear system has to be solved is kept local to each
processing unit with parallelism extracted from the other coordinate directions. Although,
this eliminates the need for special algorithms in solving the linear system, it requires
global data transposes which can be computationally quite expensive [10]. Other methods
based on divide and conquer [11,12] techniques do not require the global transposition of
data and can be applied to distributed linear systems. They involve the local solution of
interior nodes in each sub-domain, therefore all the sub-systems in a given coordinate
direction can be solved in parallel. Then a secondary smaller system has to be solved
which has a somewhat limited potential for parallelism. However for large problems, the
serial component inherent in the second step is negligible.
In addition to the solution of independent linear systems in different coordinate
directions for implicit time integration, a three-dimensional elliptic Poisson/Laplace

7
equation has to be solved in incompressible flows. A direct inversion of the sparse linear
system generated is limited by available memory and is only a possibility for small simple
systems. Direct solvers based on matrix diagonalization techniques [13] are limited to
separable coefficients and special techniques have to be used for non-separable
coefficients[14]. On the other hand, iterative solvers provide a flexible and economical
means of solving the sparse system. For a general system of linear equations with no
special properties, point and line iterative techniques coupled with multigrid acceleration
provide a robust and efficient means to obtain convergence, particularly in a domain
decomposed environment. Krylov subspace based methods like BI-CGSTAB [15] and
GMRES [16] are also quite amenable for efficient convergence in the domain
decomposed environment.
An important issue in efficient utilization of all the processing nodes is load
balancing. A well balanced algorithm is one in which all processing nodes are kept busy
all the time and do not have to wait on each other to finish a given task. Efficient load
balancing can be achieved by equal distribution of work between processors. However, in
most instances it is not always possible to do this without paying a severe penalty in
communications overheads. This is true for the application of time-dependent boundary
conditions. It is more economical to process the boundary locally to a few processing
nodes than to re-distribute boundary data to all processing nodes. Only the processors
which hold the boundary data are active during this time and the rest are idle. This is also
true during inter-grid communications in multi-block algorithms where data has to be
transferred and processed between processors which hold inter-grid boundary data, while
the rest of the processors are idle [17]. However, for large systems these calculations are a
sufficiently small percentage of the total, to be of any major significance.
8
2. Objectives
The long term objectives of this work is to develop and implement a general
purpose algorithm in non-orthogonal generalized coordinates using high-order finite-
volume methods for the Direct Numerical Simulations of turbulent flows in complex
geometries. This algorithm will be implemented in a scalable distributed parallel
environment using domain decomposition with a generic message passing library like
PVM [18] and will be portable to a range of parallel machines, ranging from coarse
grained network of workstations to fine grained tightly coupled architectures like the
Thinking Machines Connection Machine (CM-5). In this implementation, portability will
be an important consideration. It is our hope that the algorithm developed in this
environment will be portable to a range of current and future parallel architectures without
major modifications to the body of the program. The programming language used will be
Fortran-77.
The current report, summarizes our preliminary experiences with PVM on the HP-
735 cluster and the CM-5 at NCSA. A model two-dimensional elliptic Laplace equation
is solved using domain decomposition. This study provides useful insight into the
solution of the pressure-Poisson equation in solving the incompressible Navier-Stokes
equations. It also establishes the required programming framework for data distribution,
I/O, and the use of PVM for message passing between domains. Two iterative procedures
are tested and their performance compared on the HP cluster and the CM-5. In the first
method, line iterations are performed in which a tri-diagonal system is solved in one
direction with sweeps in the other direction. In the other, Stone's strongly implicit
solution procedure[19] is used to perform the iterations. The parallel efficiency of these
two methods is compared along with the CPU time required to achieve convergence to a
pre-determined level of accuracy.

9
3. Governing Equation and Discretization
The two-dimensional Laplace equation is given by:
∇2φ = 0 (1)
over 0 ≤ x,y ≤ 1.The two-dimensional Laplacian is discretized on a uniform two-
dimensional cartesian grid using centered differences with second-order truncation error.
Dirichlet boundary conditions are provided at the four boundary faces. The discretized
equation is of the form:
φi+1,j + φi-1,j + φi,j+1 + φi,j-1 - 4φi,j = 0 (2)
This can be written in a general form:
APφP = AEφE + AWφW + ANφN + ASφS (3)
where P refers to the node (i,j) and (E)ast, (W)est, (N)orth and (S)outh are the
surrounding nodes. The resulting system matrix has a banded form of the type shown in
Figure 1.
4. Solution Strategy
A number of iterative techniques can be used to solve this system of linear
equations ranging from point iterative methods where each node in the domain is updated
in a lexicographic manner to a strategy where an approximate system to that shown in
Figure 1 is solved directly at each iteration. Two strategies which are pertinent to the
solution of the pressure-Poisson equation are implemented in the current study. One
utilizes line iterations where an approximate system comprising the inner tri-diagonal
system in Figure 1. is solved at each iteration with the outer bands being treated as known
quantities on the right hand side. For a Gauss-Siedel type line iterative procedure in
10
which the tri-diagonal system is solved in the y direction and sweeps are performed in the
x direction from left to right, equation (3) can be represented as:
- ASφSk+1
+ APφPk+1 - ANφN
k+1= AEφEk+ AWφW
k+1 (3)
where k represents the iteration count. For each iteration over the whole domain, NX-2
tri-diagonal systems are solved. The tri-diagonal system is solved by using the standard
Thomas Algorithm [20].
The other iterative procedure used is Stone's Strongly Implicit solution
procedure[19]. In this procedure the original system denoted in Figure 1 is suitably
modified into an approximate system in such a way that a LU decomposition on the
modified system would yield only three non-zero elements in each row of L and U. This
considerably reduces the work required to solve the modified set. A "variable iteration
parameter" is introduced in the calculation procedure which is used to approximate
additional unknowns (nodes (i+1,j+1), (i-1,j+1), (i+1,j-1), (i-1,j-1) ) in terms of existing
unknowns (N,S,E,W and P). This parameter takes on values between 0 and 1. The
optimum value for convergence depends on the solution characteristics and is usually
between 0.85 and 0.95.
5. Domain Decomposition
The Multiple Instruction Multiple Data (MIMD) paradigm allows greater control
over data layout, particularly in dealing with complex data structures as is the case in
complex computational geometries. The method of domain decomposition falls into this
category and provides an effective way to solve the Navier-Stokes equations by
decomposing the physical/computational domain into sub-domains. Each sub-domain or
task is then mapped to a processing unit with each processing unit performing
11
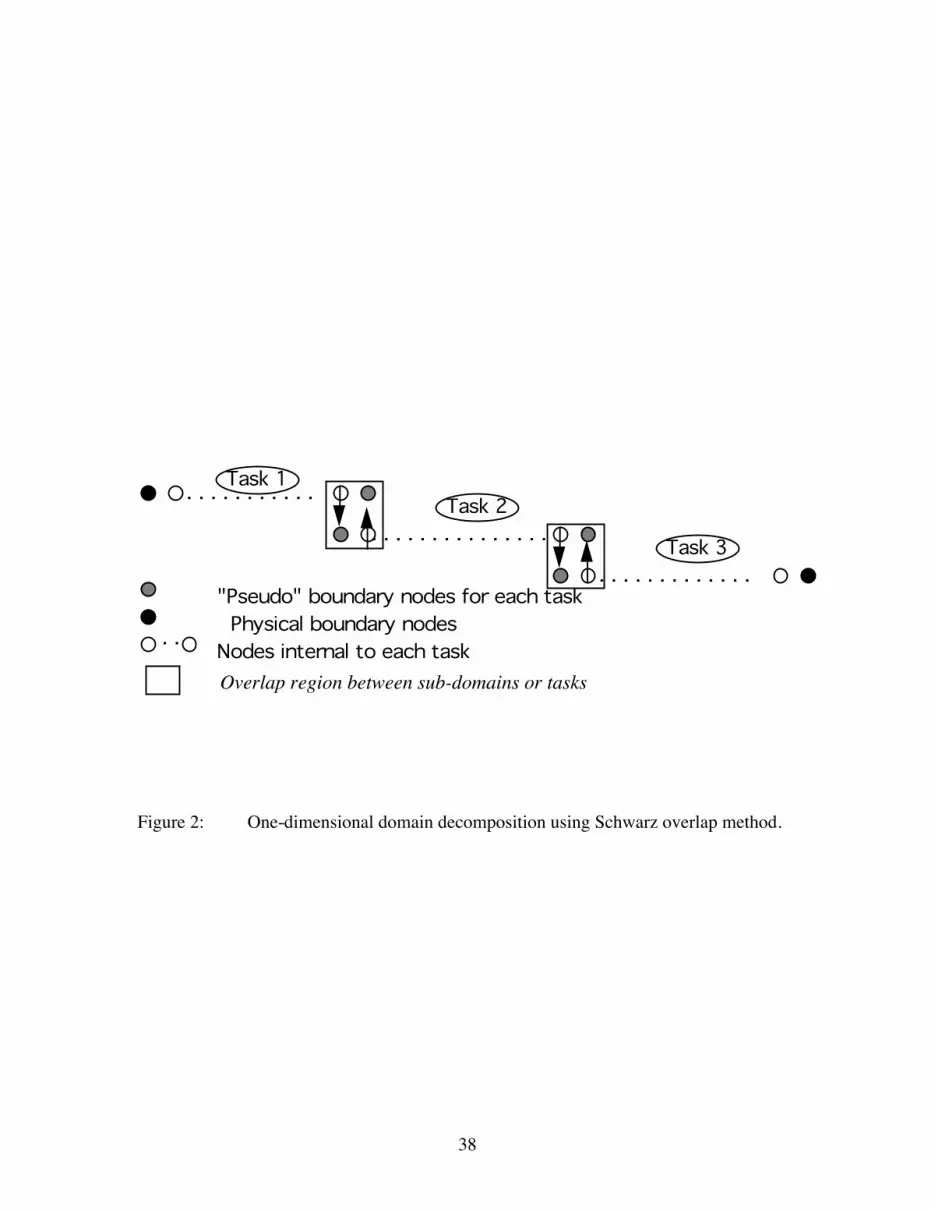
computations independently of the others. In the current implementation the Schwarz
overlap method [5] is utilized in which adjacent sub-domains have an overlap region. In
the Schwarz method, the "pseudo" boundary values of one sub-domain lie in the interior
of the adjacent sub-domain and vice-versa. This allows a natural way of coupling two
adjacent sub-domains by interchanging boundary values across domains via message
passing. The one-dimensional equivalent of the overlap concept for a domain distributed
between three tasks or sub-domains is shown in Figure 2.
The degree of overlapping between domains is dependent on the order of the
finite difference approximation. For example, fourth order approximations of the
Laplacian would require a overlap region consisting of two nodes in each sub-domain to
accommodate the bigger stencil used. With the current discretization, nodes 2 to N-1 are
"active" or internal nodes in each sub-domain. It follows naturally that by treating nodes
1 and N as boundary nodes or known quantities, each sub-domain can be treated as an
independent system. This concept is particularly useful in iterative procedures, in which
each sub-domain is treated independently of the others, or in parallel, where the same
program executes on all the processing nodes but acts on data local to a sub-domain. This
necessitates the updating of "pseudo" or internal boundary nodes after each iteration.
With reference to Figure 2, the updated value of node N in Task A is obtained from node
2 in Task B and conversely the updated value of node 1 in Task B is obtained from node
N-1 in Task A. This requires the use of explicit message passing protocols between tasks.
The obvious advantage of domain decomposition, besides being consistent with
the use of block structured grids in CFD, lies in its potential for parallel computations.
However, there is also a price to pay. First, is the cost of communications or message
passing between tasks or sub-domains. One important factor which is quite critical is the
ratio of floating point operations to communications. A high ratio allows the use of more
12
parallelism with potentially high speed-ups over a single processor. The optimal degree
of parallelism is machine dependent and is a function of the speed with which floating
point operations are performed and the latency and bandwidth of the communication
network between processors. The other factor which often comes into play is the
deterioration of the convergence characteristics of an iterative scheme. The ellipticity of
the field equations require the propagation of information of all wave numbers over the
entirety of the computational domain. Domain decomposition in some respects is a
barrier to the propagation of information at low wave numbers which is a result of the
artificial decomposition into sub-domains. The degree of deterioration is dependent on
the characteristic behavior of the iterative procedure in reducing low wave number errors.
For example, the Jacobi point iterative method is very limited in its capability to reduce
low wave number errors in the first place and domain-decomposition will not have any
effect on its convergence characteristics. As the ability of an iterative scheme to
propagate low wave number information increases, domain-decomposition will have a
greater detrimental effect on its convergence characteristics. In the current study, Stone's
Strongly implicit method propagates low wave number information much more
efficiently than the line iterative scheme on a single domain and its convergence
characteristics will be affected more by domain decomposition.
6. Parallel Implementation
In the current implementation a master/slave programming environment is used.
This was partially motivated by the setup of the HP cluster at NCSA which consists of a
HP-715 file server connected via ethernet to HP-735 processing nodes. The other
programming environment which is commonly used is the hostless model, in which all
active nodes are equal and distribute the computational work between themselves. In the
master/slave environment a master program executes on one processor (master) and

13
spawns tasks on slave processors, which do all the computational work. The master acts
as a control processor and does not interact heavily with the slaves. In the current
implementation the master program performs the following duties:
M(a) Reads input data regarding problem size, and miscellaneous constants used in the
solution procedure. The input also specifies the number of sub-domains or
partitions in each coordinate direction. It also specifies the degree of overlap
between sub-domains. Although in the current calculation, the overlap is one, by
treating this parameter as a variable generalizes the programming environment
considerably.
M(b) Based on the input, the master calculates the beginning and ending indices in each
coordinate direction for each partition. In doing so it distinguishes between
physical boundary and boundaries between sub-domains (pseudo boundaries) and
adjusts the beginning and ending indices by taking the overlap region into
consideration.
M(c) Once all the parameters needed by the slave processors to perform their tasks have
been calculated, the master sends all this information to the respective slave
processors.
M(d) Once this is done the master idles and waits till it receives the maximum
calculated residue from each sub-domain. It then performs a convergence check
by comparing the residues to a set convergence criterion. If this criterion is
satisfied for all the sub-domains it instructs the slave processors to send the final
solution which it subsequently receives from all sub-domains and assembles it in
global coordinates to be printed out. If convergence is not reached then the master
instructs the slave processors to continue with the calculation and waits for the
next convergence check.

14
In a master/slave model, it is important to realize that the assembly or storage of
global arrays on the master processor will at some point restrict the maximum problem
size which can be solved. Therefore, it is prudent to construct and store all geometrical
and finite-difference coefficient arrays on the slave processors specific to the sub-
domains which reside on them.
In the current domain-decomposed environment the slave program is identical on
each slave processor and perform the same sequential tasks on their respective sub-
domains. The slave program performs the following tasks:
S(a) It receives all the data sent by the master in M(c) above. Based on this data it
establishes the active calculation domain indices and the boundary node indices.
On each slave processor the indices vary from 1 to N and are oblivious of the
global indexing. However, the slave processor is cognizant of its global order.
Efficient memory management on the slave processors is hampered by the
inability of Fortran-77 compilers to allocate arrays dynamically. In light of this
shortcoming, the sub-domain arrays that reside on slave processors have to be
hardwired before compilation. Although not a serious impediment to efficient
implementation, it often results in wasted resources.
S(b) In the next step, the slave program generates the grid in x and y directions based
on global ordering. For uniform Cartesian grids, this is quite straight forward.
However, if complex grids are generated a priori , then it would be necessary to
read the grid coordinates. This could be accomplished by reading the grid file on
the master processor and sending relevant sub-domains to each slave processor or
conversely by reading the grid coordinates directly on the slave processor.
S(c) Next the slave program provides an initial guess for the solution domain. Also a
check is made to determine whether any physical boundaries reside on that

15
processor. If the sub-domain is bounded by physical boundaries, then the
appropriate boundary condition is applied to the boundary nodes.
S(d) Once the initial guess and boundary conditions are applied, the iterative solution
procedure is invoked. After every iteration, the boundary values in each sub-
domain are updated with values from their adjacent sub-domains as shown in
Figure 2. Before information is exchanged between adjacent sub-domain
boundaries, the nature of the boundary is established (whether it is an internal or
physical boundary). More detailed implementation details are given in section 6.1.
S(e) The iterative procedure is resumed once the appropriate internal boundary updates
are done. Every few iterations (in this study 10), the maximum residue within
each sub-domain is calculated and sent to the master for a global convergence
check as in (d) in the master program. If convergence is not satisfied, then the
master instructs the slaves to proceed with the calculations. If convergence is
satisfied then the master instructs the slaves to send their sub-domain solutions
back to it.
These are basic tasks performed by the master and slave programs. These tasks
can vary considerably from one application to the other. However, the programming
environment established in the current study can be readily extended to more complex
problems involving the solution of the Navier-Stokes equations with domain
decomposition. Message passing between processors are an implicit part of the master
and slave programs. In the interests of portability, the message passing library PVM [18]
is used for this purpose. The following section describes some aspects of using PVM. A
more thorough description can be found in reference [18].
16
6.1. Message Passing with PVM
PVM (version 3.1) software permits a network of heterogeneous Unix computers
to be used as a single large parallel computer by allowing these computers or processing
units to communicate in a coherent manner between each other. It supports heterogeneity
at the machine and network level and handles all data conversion between computers
which use different integer and floating point representations. Currently PVM is
supported on a wide range of Unix machines from workstations to vector processors like
the Cray C-90, Convex C-series and massively parallel architectures like the CM-5 and
Intel Paragon. In order to use PVM it has to reside on all the machines in the
heterogeneous system. Before running the application, the PVM daemon has to started on
all the machines comprising the virtual system. For more details regarding installation
and starting PVM on a system of machines see reference [18].
In the master/slave version, first the master is enrolled in PVM by calling
pvmfmytid. This command enrolls the process (in this case the master program) in PVM
and returns a unique task identification. Once the master is enrolled in PVM, it spawns a
task (the slave program) on the slave processors by calling pvmfspawn. Each of the slave
processors return a task identification number once the spawning has been done
successfully. The slave program or task on each processor enrolls in PVM by calling
pvmfmytid. Since the slaves already have a specific task identification assigned to them
through the pvmfspawn command from the master, the task identification numbers
returned through pvmfmytid are the same as those assigned to them from the pvmfspawn
command. Once the calculation procedure has been completed, both the master and the
slave program call pvmfexit, which tells the local PVM daemon that they are leaving
PVM.
17
Message passing between master and slave processors and between slave
processors is accomplished by using message passing commands in PVM. To send a
message, pvmfinitsend, pvmfpack and pvmfsend are used. Pvmfinitsend clears the send
buffer and prepares for packing a new message. The data encoding scheme has to be
specified in this call which prepares data to be sent to a different machine in a
heterogeneous environment. Pvmfpack packs the data in the send buffer. The type of data
to be packed (integer, real*4 ...) has to be specified, the name of the data entry, a pointer
to the beginning of the data entry, number of elements to be sent and the stride have to be
specified. Once all the data to be sent has been packed in the buffer, the pvmfsend
command is used. The user specifies the task identification number the message is to be
sent to, and also a message identification tag. The task identification number ensures that
the message is directed to the appropriate task, while the message identification tag is
matched at the receiving end to make sure that the right message has been received.
Pvmfsend is non-blocking or asynchronous, that is, computation on the sending processor
resumes as soon as the message is sent.
Conversely, to receive a message the commands used are in the opposite sequence
of sending a message. Pvmfrecv and pvmfunpack are the counterparts of pvmfsend and
pvmfpack.. Pvmfrecv is supplied with the task identification number of the sending
processor and also the message identification tag of the message itself. Once the receiving
processor makes certain of the legality of the message in its receive buffer, it places the
message in a new active receive buffer and clears the current receive buffer. Unlike
pvmfsend, pvmfrecvis blocking or synchronous; that is, it won't proceed with any
calculations till the message is received by it. Pvmfunpack transfers the data from the
active receive buffer to the specified destination array.

18
The send and receive message passing protocols are used to communicate
between master/slave and between slave processors. As outlined in section 6, data
transfer between processing nodes occurs in M(c) to S(a), S(d) to S(d), S(e) to M(d) and
back from M(d) to S(e). The transfer of messages between slave processors at the end of
each iteration in the solution kernel has the largest overhead associated with it. Some of
the logistical issues associated with this data transfer are described in greater detail.
Figure 3 shows a slave processor doing calculations on a given sub-domain and
surrounded by its four neighboring sub-domains. Each sub-domain performs calculations
on local nodes (2:nx-1,2:ny-1), which are represented by the shaded area in Figure 3.
Nodes (1, 2:ny-1) on the west face, (nx,2:ny-1) on the east face, (2:nx-1,1) on the south
face and (2:nx-1, ny) on the north face act as pseudo or internal boundary nodes. At the
end of each iteration these boundary values have to be updated by values from the
adjacent processor or sub-domain. For example on the east face of task ME, ME will
send values φ(nx-1,2:ny-1) which will be received by task RT in φ(1,2:ny-1) and
similarly task RT will send φ(2, 2:ny-1) which will be received in task ME and placed in
φ(nx,2:ny-1). In effect, each task or sub-domain will send four messages and receive four
messages (unless the sub-domain contains a physical boundary where the data transfer is
not necessary).
In implementing the message passing between slave processors, the slave program
has two routines, one for sending messages out and the other for receiving messages. In
the send routine, the task identification of the ME task is established, and also the task
identifiers for the surrounding tasks UP, DN RT, and LF are determined. This establishes
to which task a particular message has to be sent. In sending messages, the message
identification tag should be unique, since each task receives four messages from
surrounding tasks and should know on receiving the message its final destination in array
φ. The message identification tag used is a three digit code; the first digit is for messages
19
in the x or i direction, the second for the y or j direction, and the third for the z or k
direction. Each digit takes a value of 1 or 2 depending on the direction in which the
message is moving. For example in Figure 3, messages moving in the x direction will
have tags of either 100 or 200, and similarly messages moving in the y direction will have
tags of 010 or 020. The number 1 is assigned to messages moving in the positive
direction from south to north or west to east and the number 2 is assigned to messages
moving in the negative direction. In effect the east face of task ME will send a message
with tag 100 and receive a message with tag 200. Similarly, the west face of RT will send
a message with tag 200 and receive a message with tag 100. On each slave processor, the
respective sends are processed first and the calculation does not proceed till all the
messages are received (synchronous). This always ensures that the next iteration does not
start till all the boundary values are updated in the sub-domain.
6.2. Differences in Implementation on HP cluster and CM-5
This section outlines some of the differences and difficulties encountered in
programming on the HP cluster and the CM-5. One major difference between the HP F77
compiler and the Sun F77 compiler (for the CM-5) is the inability of the Sun compiler to
recognize triple subscript notation of type (ibeg:iend:istride). The legality of this notation
on the Hp's made the sub-sectioning of two and three dimensional arrays much simpler
and greatly facilitated the sending and receiving of array sections. On the CM-5, the array
sections first had to be translated to a one-dimensional array and re-translated back to a
two-dimensional array on the receiving processor. Two representative programming
examples are given for sending an array section A(25:75,65:100) from one processor to
say A(1:51,1:36) on another processor.
HP cluster:
SEND...........ni = 75 -25 + 1nj = 100 - 65 + 1

20
np = ni * njmsgtype = 1call pvmfinitsend(.....call pvmfpack(REAL4, a(25:75, 65:100), np, 1, info)...................
RECEIVE...............ni = 75 -25 + 1nj = 100 - 65 + 1np = ni * njmsgtype = 1call pvmfrecv(..........call pvmfunpack(REAL4, a(1:51, 1:36), np, 1, info)................
CM-5
SEND
..........ni = 75 -25 + 1nj = 100 - 65 + 1np = ni * njmsgtype = 1
do 99 j = 65, 100jj = j - 65 + 1do 99 i = 25, 75ii = i - 25 + 1izz = (jj-1) * ni + iiatemp(izz) = a(i,j)99continuecall pvmfinitsend(...........call pvmfpack(REAL4, atemp, np, 1, info)....................
RECEIVE........ni = 75 -25 + 1nj = 100 - 65 + 1np = ni * njmsgtype = 1call pvmfrecv(REAL4, atemp, np, info)do 99 j = 1, njdo 99 i = 1, niizz = (j-1) * ni + ia(i,j) = atemp(izz)99continue.......................
21
Other differences were encountered in the use of timers. On the HP cluster the
function calls dime and etime were used to time different code sections. Dtime returns the
difference in time between two calls and etime returns the absolute time at each call. On
the CM-5, the timing utilities cmmd_node_timer_clear(), cmmd_node_timer_start(), and
cmmd_node_timer_stop() were used. There were some difficulties encountered with I/O
from the slave processors. Separate files were opened from each processing unit on the
HP and the CM-5 where all the I/O from a given processing unit was directed. This did
not prove to be a problem on the Hp cluster due to the small number of processing nodes
used. However, on the CM-5, since UNIX sets a limit on the number of files that can be
opened at any one time, this approach was not feasible for a large number of processors
and was abandoned. Alternate modes of I/O for slave processors on the CM-5 will be
looked into in future studies[21].
7. Results and Discussion
The two solution strategies outlined in section (4) were tested on the HP cluster
and the CM-5. The purpose of this section is to compare the parallel efficiency of the
solution strategy and also to compare the relative performance between the HP cluster
and the CM-5. It should be noted that except for the changes outlined above the same
codes were used on both the systems. No attempt was made to utilize the vector units on
the CM-5 by writing the slave program in CM-Fortran. To see the effect of domain
decomposition on the convergence of the Gauss-Siedel line iterative procedure (denoted
as GSL), only a one dimensional decomposition was used. Since the tri-diagonal line
solves are performed in the y direction, the domain was decomposed only in that
direction to form a multitude of smaller tri-diagonal systems for each x location. To
facilitate comparison, a similar decomposition was also used for Stone's method (denoted
as Stones).

22
On the HP cluster two-dimensional domains with 50x50, 100x100, and 200x200
nodes were tested for both GSL and Stones on 1, 2, 4, and 6 processors of the HP cluster
(during the time of this study more processors were not available). On the CM-5 a
200x200 calculation was done for up to 64 processing nodes for both GSL and Stones. In
addition a 1024x1024 calculation for Stones was done on 8 to 64 processing nodes. For
the Stones method the iteration parameter was set to 0.9 in all the calculations. The
optimum value of this parameter was established with the domain decomposed on 6 HP
processing units. In all the calculations, the convergence criterion was set to 2.E-5 for the
maximum allowable residue over the whole calculation domain. On the HP cluster the
master program executed on a HP-715 and the slave programs on Hp-735s. On the CM-5,
the master executed on the partition manager, while the slaves executed on the nodal
SPARC-2 chips. Timers were used to estimate the time spent in different sections of the
kernel (the kernel just included the floating point operations in the solver,
communications between slave processors at the end of each iteration, communication of
residues to master and corresponding reply from master). Also, none of the timing studies
were done in a dedicated mode. However, the timings obtained on the HP cluster and on
the CM-5 were comparable between multiple runs (within ± 10%). The following
procedures were timed independently
(a) Timer 1: time in floating point operations of solver.
(b) Timer 2: time used by pvmfinitsend for communications between slave processors.
(c) Timer 3: time used by pvmfpack for communications between slave processors.
(d) Timer 4: time used by pvmfsend for communications between slave processors.
(e) Timer 5: time used by pvmfrecvfor communications between slave processors. This
included the idle time till the message was received. If processor A finished its work
earlier than processor B from which it is (A) expecting a message, then the time spent in
waiting for this message will accumulate in this timer.
23
(f) Timer 6: time used by pvmfunpack for communications between slave processors.
(g) Timer 7: time used for convergence checking. This would include the time used in
sending the maximum residue to the master, reception by the master from all slave
processors, the time taken by the master to make a decision, to broadcast that decision
back to all the slave processors and the reception of this message by the slave. During this
time, all the slave processors remained idle.
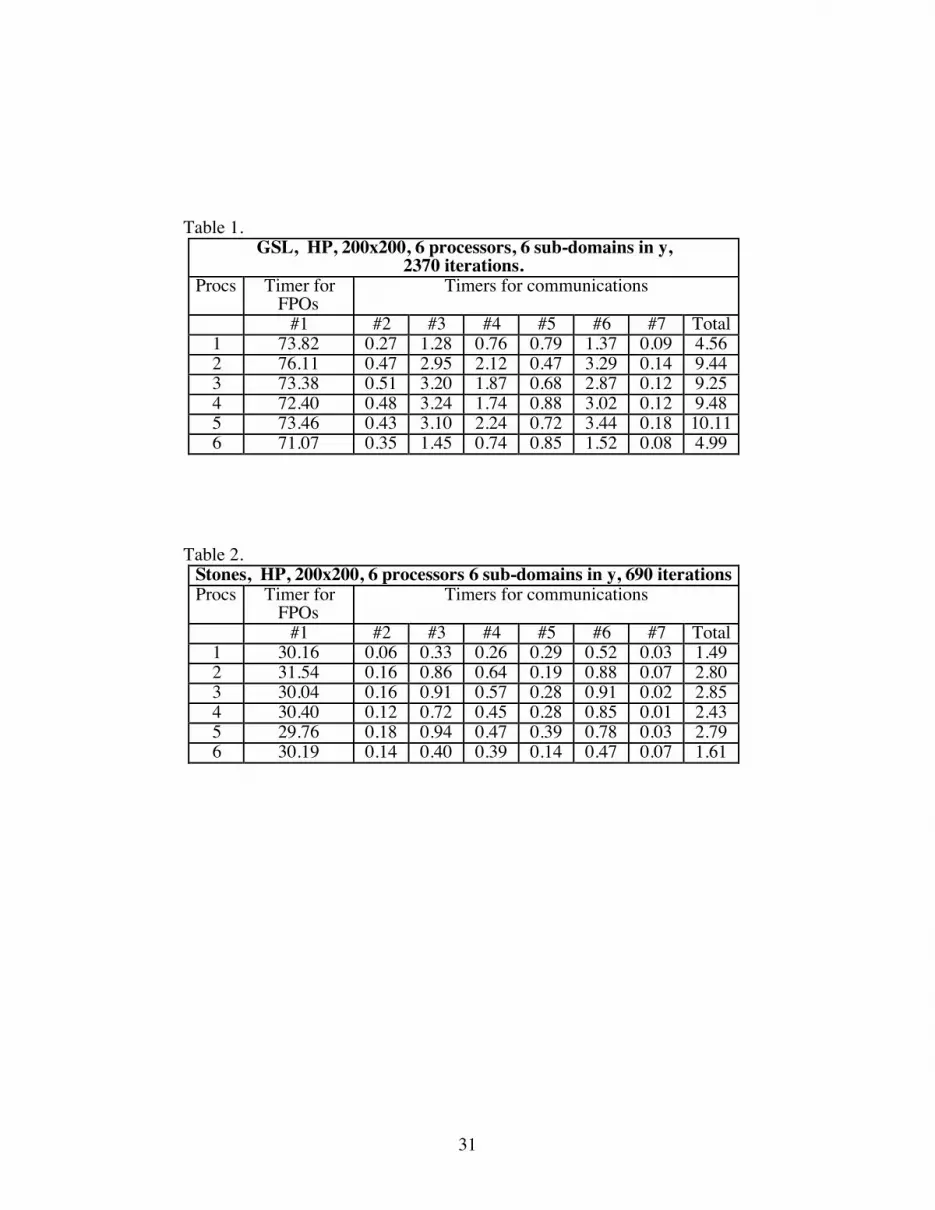
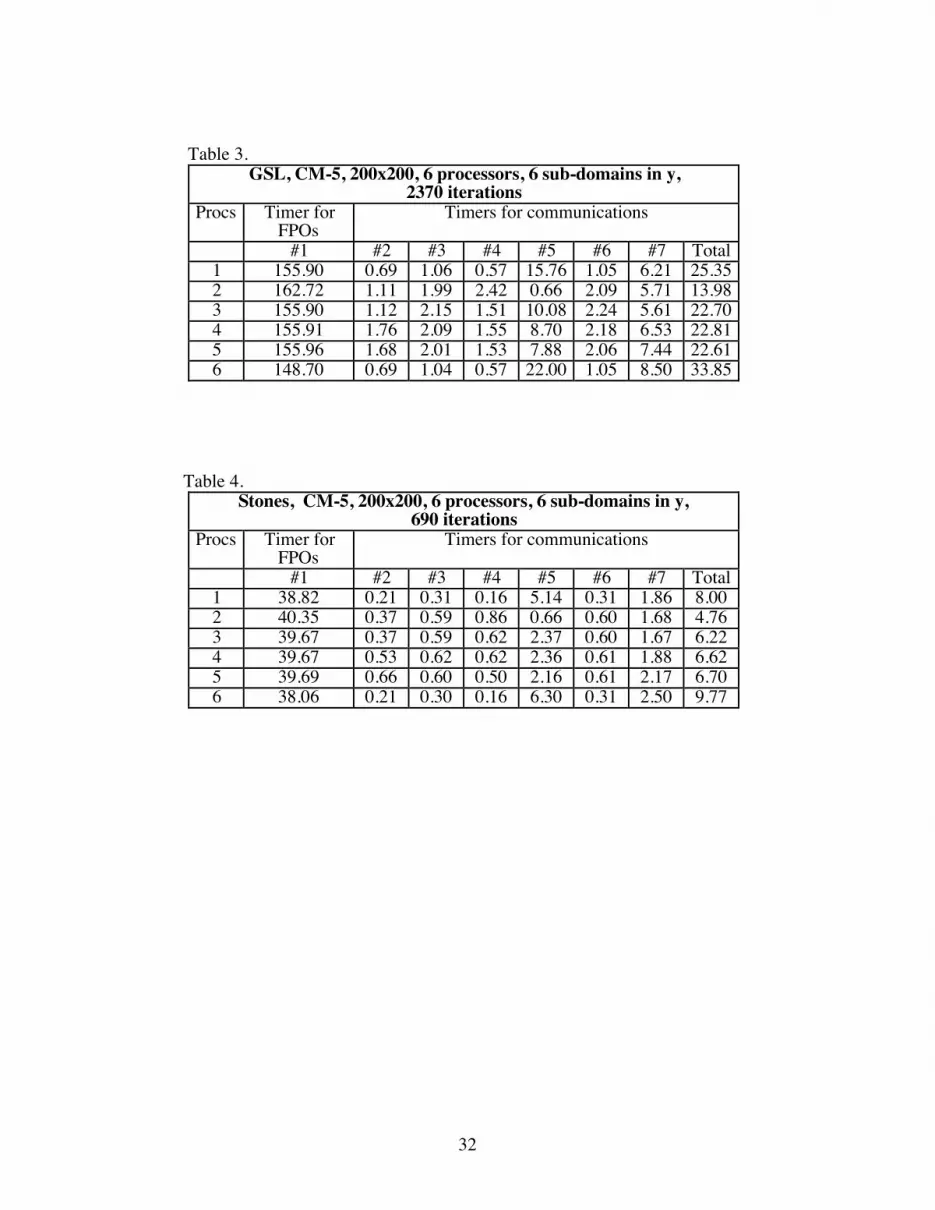
Table 1 through 4 give detailed timings on representative runs with a 200x200
resolution, and six sub-domains in the y direction. Timings for GSL and Stones are given
on the HP cluster and CM-5. By dividing the physical domain into equal sub-domains,
good load balancing is achieved between the different processing nodes. Domain 1 and 6
contain physical boundaries and send and receive boundary values only at one boundary
interface. The following observations can be made from these tables.
(a) Stones method converges in fewer iterations than GSL (690 v/s 2370 for GSL).
(b) The approximate ratio of time spent in floating point operations (timer #1) between
the CM-5 and HP cluster for GSL is 2.1 (163/76) and for Stones is 1.33 (40/30). For
consistency both ratios should be the same and the reason for these discrepancy is not
known.
(c) Each HP-735 processor performed at approximately 3.5 MFLOPS in the calculation
kernel2. On the other hand, a Sparc chip on the CM-5 varied in performance anywhere
between 1.1 to 3 MFLOPS.
(d) On the HP cluster, packing (timer #4) and unpacking (timer #6) were the most costly
operations in the communication calls. Convergence checks (timer #7) used the least
amount of time. Total communication times in processors 1 and 6 on the HP-cluster are
2Each add and each multiply were assumed to represent a floating point operation. All tests were performedwithout any optimization switches activated. Level 1 and 2 optimization on the Hp-735's gave speedups of3.5 to 4, resulting in 12-13 MFLOPS per processor.
24
about half those of the other processors, which is consistent with the fact that they have to
send and receive only at one boundary.
(e) On the other hand, the receiving of data on the CM-5 was by far the most
expensive communication call (timer #5). Also the convergence checks (timer #7), are
much more expensive than on the HP cluster. It can also be observed that the processors
which contain the physical boundaries (processors 1 and 6), take much longer to receive
their data than the rest of the processors. Conversely, processor 2 receives its data
extremely fast compared to the other processors. These were not chance events, and the
exact same trends were observed for multiple runs and for different levels of domain
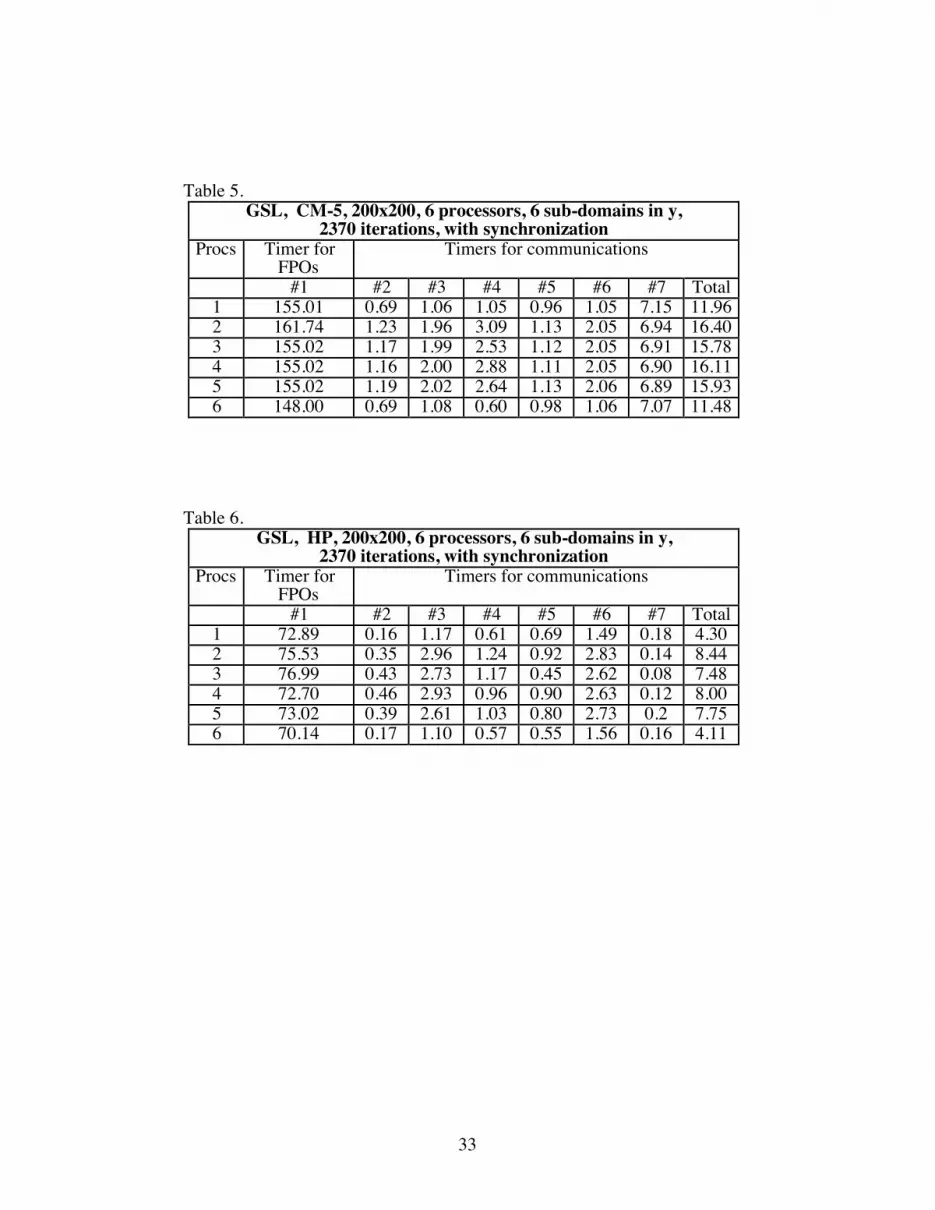
decomposition. In order to clarify the cause of these discrepancies in timer #5, forced
synchronization through the CMMD function call cmmd_sync_with_nodes was
introduced at the beginning of the slave program, between the end of each iteration sweep
and the pvmfinitsend command and between the pvmfsend and pvmfrecv call on each
slave processor. This made sure that the calculations started at the same time on all slave
processors, that each iterative sweep was finished on all slave processors before the send
to neighboring processors was initiated, and that the receive on each processor was
initiated after the send sequence was completed on all processors.
Table 5. shows a run with synchronization in place. It can be seen that timer #5 is
much more uniform across all the slave processors. So it can be concluded that the non-
uniformity in timer #5 was caused by slave procesors not finishing their calculations at
the same time and one processor waiting on its neighbor to receive data. In the current
implementation, the number of nodes in each domain were calculated in such a way that
the first processor had 33 active nodes in the y direction, the second processor had 34,
and the rest had 33 except node six which had 32. This decomposition was done based on
the total nodes (200) rather than on the number of active or internal nodes (198), which is
a better strategy and will be followed in future.
25
However, using the same type of synchronization on the HP cluster (this was done
by using pvmfjoingroup and then pvmfbarrier for each slave processor) did not make any
appreciable difference in the communication timers. This is shown in Table 6. Comparing
Table 1 and 6 show no appreciable differences between the two. This would indicate that
each HP-735 processor performed more uniformly than the CM-5 processing nodes.
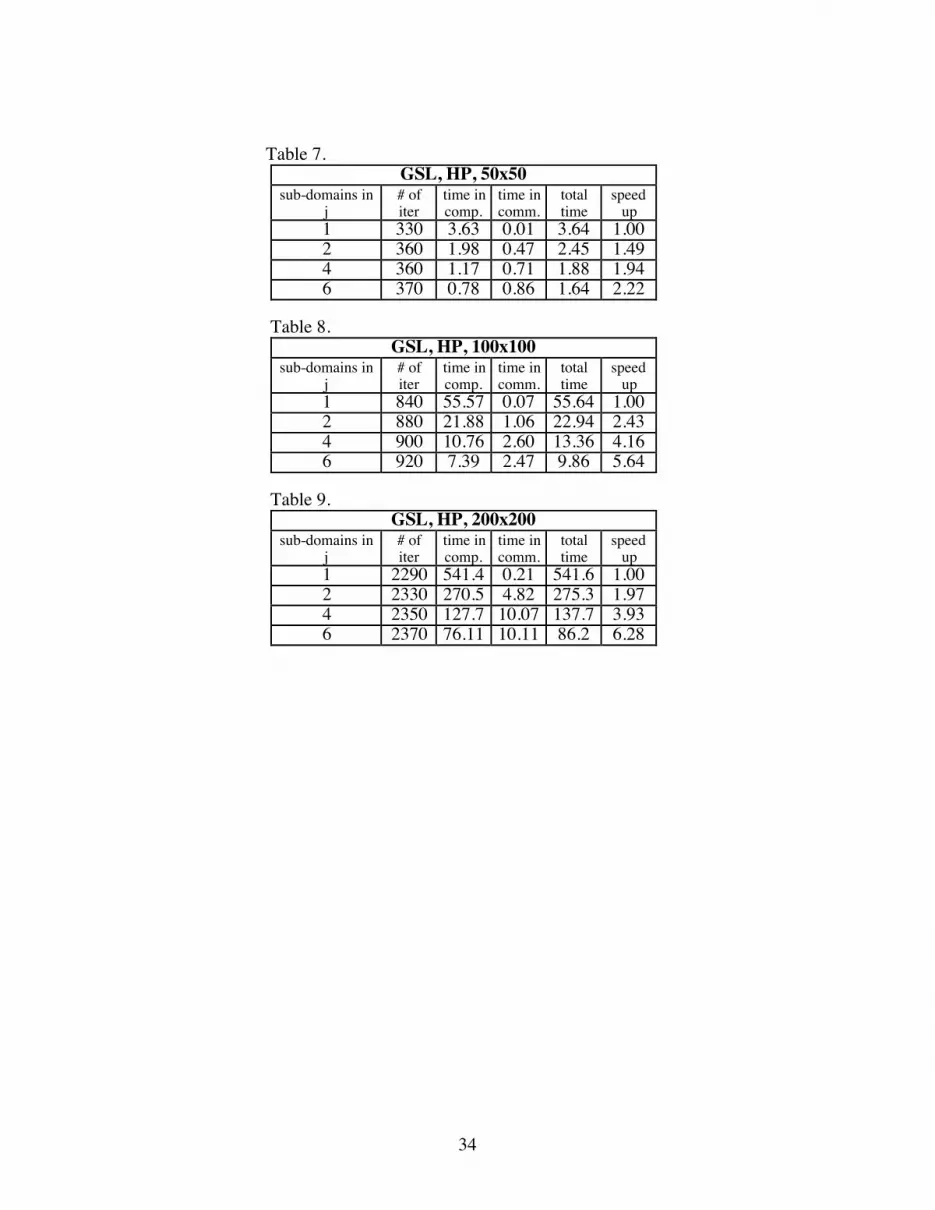
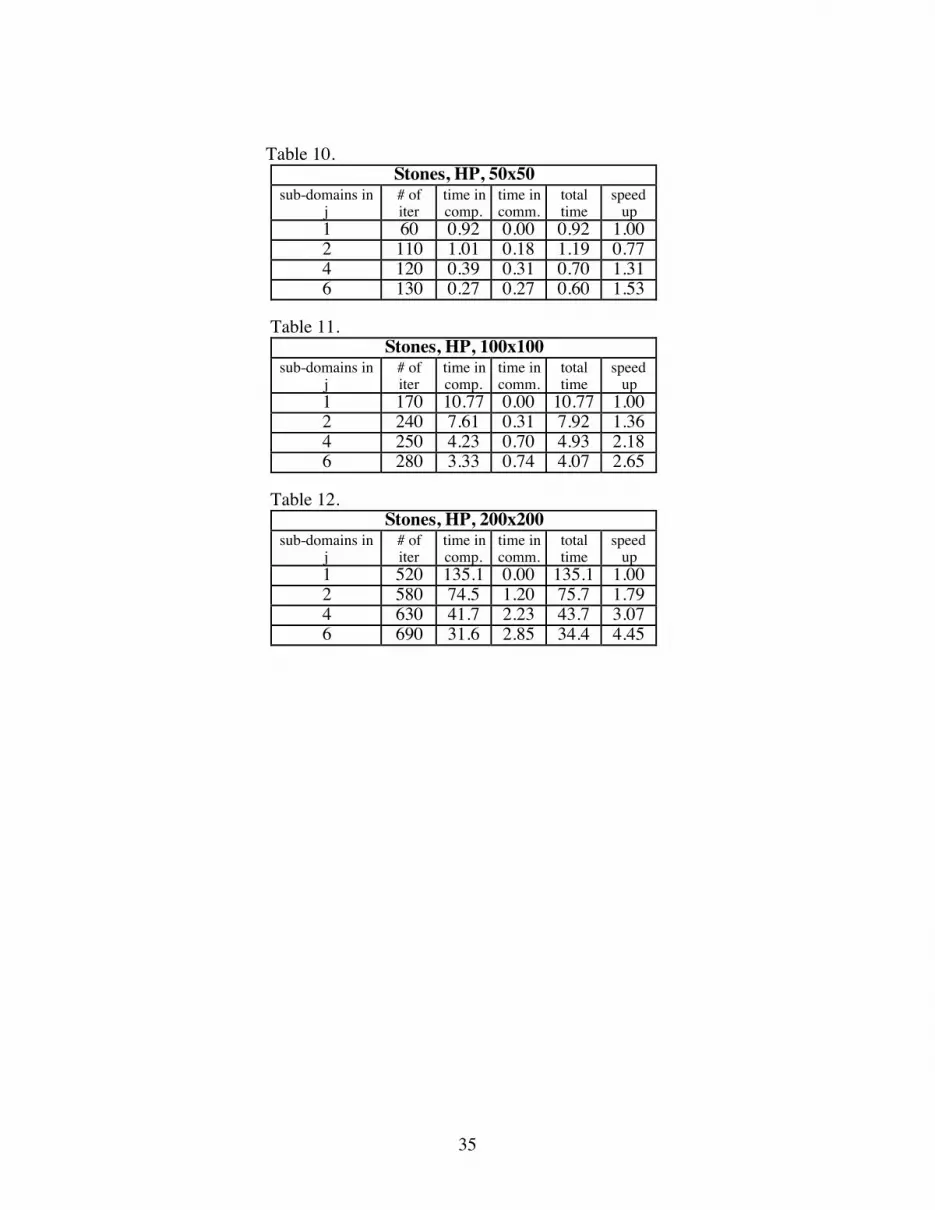
Tables 7 to 15 summarize all the runs made on the HP cluster and the CM-5. The
maximum number of processors used on the HP cluster was 6 and calculations were
performed for resolutions of 50x50, 100x100, and 200x200 for both GSL (Tables 7-9)
and Stones (Tables 10-12). On the CM-5, only 200x200 calculations were done for 1 to
64 processors (Tables 13 and 14). Table 15 summarizes a 1024x1024 calculation with
Stones method on 8 to 64 processors. In constructing these tables, the maximum values
were used in estimating the computational and communication times without any explicit
syncrhonization. For example, the representative timings in Table 12 for 6 sub-domains is
obtained from processor 2 for computations and from processor 3 for communications
(see Table 2). The parallel speed up is calculated by using the ratio of total CPU time on
1 processor to the total CPU time on n processors. In general it is found that parallel
speed up for the 50x50 calculations is not as good as the 200x200 calculations. The
number of iterations for convergence increase with the number of sub-domains for both
GSL and Stones. However, as expected the increase is much greater for Stones method.
For both GSL and Stones, as the problem size increases, the percentage increase in
iterations decreases. On the HP cluster, even though the parallel speed up for Stones is
not as high as GSL, it is about three times faster than GSL. On the CM-5, for the 200x200
resolution, GSL exhibits a maximum parallel speed up of up to 22 on 24 processors and
then deteriorates to 13.27 on 64 processors. It should be pointed out that there are some
anomalies in Table 13 for GSL on the CM-5, which cannot be explained. For the most

26
part, parallel speed up in Table 13 is greater than the number of processors. It seems as if
the floating point operations/processor are performed faster as the number of processors
increase. Stones exhibits a maximum speed up of 5 on 16 processors. For a 1024x1024
calculation, Stones exhibits a parallel speed up of 5.7 against a maximum possible of
64/8.
An approximate general expression for parallel speed up can be written as:
S = NxNy
NnfSf
Nx
Px
NyPy
N'nfSf
+2OxN'cNy
PySc+2Oy
N'cNxPxSc
(4)
where,
Nx total number of active degrees of freedom (dof) in the x coordinate
direction.
Ny total number of active degrees of freedom in the y coordinate direction.
nf number of floating point operations / degree of freedom.
Sf speed of computation, expressed in floating point operations per second.
N multiplicative factor for number of floating point operations on single
processor. e.g. number of iterations.
N' multiplicative factor for number of floating point operations on multiple
processors. e.g. number of iterations.
N'c multiplicative factor for communications on multiple processors. e.g.
number of iterations.
Px number of processors/decomposition in x direction.
Py number of processors/decomposition in y direction.
Ox number of overlap points in x direction. If Px=1 then Ox = 0.
Oy number of overlap points in y direction. If Py=1 then Oy = 0.
27
Sc speed of communications. This is calculated as the average time taken for
one processor to send and receive a word to its neighboring processor.
Expressed as words per second.
The numerator quantifies the time taken for a single processor calculation and the
denominator quantifies the time taken by each processor for computations and
communications. Equation (4) can be used to get an estimate of the speed up for a given
calculation kernel if Sf and Sc are known for the system. For the calculations in this
study, equation (4) can be further simplified given that N' = N'c and Px = 1. This gives
S = Py
N'
N{1+
2Oynf
PyNy
Sf
Sc}
(5)
Equation (5) implies that for a given calculation and communication kernel, parallel
speed up is directly proportional to the number of floating point operations per processor
and inversely proportional to the ratio Sf/Sc and to the extent of the overlap region.
Having an estimate of these values on a given machine configuration and assuming N=N',
an upper bound on parallel speed up can be estimated. On the HP cluster Sf was found to
be 3.5E+63 and Sc was found to vary between 40,000 for 50x50 to about 100,000
words/second for 200x200.
8. Conclusions and Future Work
A preliminary study was conducted with the message passing library PVM for the
iterative solution of a two-dimensional Laplace equation. A line iterative procedure and
Stones strongly implicit solution procedure were used. The intent of this study was not so
much to study the solution of the Laplace equation as it was to establish the necessary
3See footnote 2 on page 23.
28
groundwork and to understand the issues involved in parallel programming in a domain-
decomposed environment for the incompressible Navier-Stokes equations.
Two machine configurations were looked at in this study, a 6 processor HP-735
cluster at NCSA and a 512 processor CM-5. There were some differences in the F77
compilers between the two machines and suitable modifications had to be made in the
computer program. It was found that although the Stones method did not parallelize as
effectively as the line iterative procedure, it took much less CPU time to give a converged
solution. It was found that the HP-735 processors performed more uniformly than the
CM-5 processing nodes. For comparing the CM-5 and the HP cluster, partial CM
partitions (< 32 nodes) were used for most of the calculations. This is not the best or the
most efficient utilization of the machine and some of the anomalies seen in this study
could be a result of this.
Future work will concentrate on implementing a three-dimensional
incompressible Navier-Stokes solver with domain-decomposition. The pressure Poisson
equation will be solved using an iterative multigrid solution procedure.
9. Acknowledgements
The authors would like to thank United Technologies for their financial support.
Technical support from NCSA staff, John Quinn, and Rick Kufrin and TMC site
representative Dr. Charlie Liu is gratefully acknowledged.
29
References
1. M. Rai, and P. Moin, Direct Simulations of Turbulent Flow Using Finite-Difference Schemes, J. Comput. Phys., vol. 96, pp. 15-53, 1991.
2. C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang, Spectral Methods inFluid Dynamics, Springer-Verlag, New York, 1987.
3. A. T. Patera, A Spectral Element Method for Fluid Dynamics, J. Comput. Phys., vol.54, pp. 468-488, 1984.
4. CM Fortran User's Guide for the CM-5, Thinking Machines Corporation, Cambridge,
Massachusetts, January 1992.
5. Schwarz, H. A., Uber Enen Grenz Bergang Durich Alternirender Verfahren, Ges.
Math. Abhandlungen, Bd. 1, Berlin, 133-143, 1870.
6. Benek, J. A., Buning, P. G. and Steger, J. L., A 3-D Chimera Grid Embedding
Technique, AIAA Paper AIAA 85-1523, July 1985.
7. H.S. McFaddin, and J.R. Rice , Collaborating PDE Solvers, Applied Numerical
Mathematics, vol. 10, 279-295, 1992.
8. J. Kim, and P. Moin, Application of a Fractional-Step Method to IncompressibleNavier-Stokes, J. Comput. Phys., vol. 59, pp. 308-323, 1985.
9. Pulliam, T. H., and Chaussee, D.S., A Diagonal Form of an Implicit Approximate-
Factorization Algorithm, J. Comp. Physics, 39, 347-363, 1981.
10. Chyczewski, T., Marconi, F., Pelz, R. and Curchitser, E., Solution of the Euler and
Navier-Stokes Equations on a Parallel Processor Using a Transposed/Thomas ADI
Algorithm, AIAA paper 93-3310, 11th AIAA Computational Fluid Dynamics
Conference, July 6-9, 1993.
11. Bondeli, S., Divide and Conquer: A Parallel Algorithm for the Solution of a
Tridiagonal Linear System of Equations, Parallel Comput. 17, 419-434, 1991.
12. Wang, M.Y. and Vanka, S.P., A parallel ADI Algorithm for High-Order Finite-
Difference Solution of the Unsteady Heat Conduction Equation, and its
Implementation on the CM-5, Numerical Heat Transfer-B, 24(2), 143-159, Sep.
1993.

30
13. Haidvogel, D. B. and Zang, T., The accurate solution of Poisson's equation by
expansion in Chebyshev polynomials, J. Comp. Phys., 30, 167-180, 1979.
14. Schumann, U., Fast Elliptic Solvers and their application in fluid dynamics.
Computational Fluid Dynamics. Ed. by W. Kollmann, Hemisphere Publishing
Corporation, New York, 1980.
15. Van der Vorst, H. A., BI-CGSTAB: A Fast and Smoothly Converging Varient of BI-
CG for the Solution of Non-Symmetric Linear Systems, SIAM J. Sci. Stat. Comput.,
13, 631-644, 1992.
16. Saad Y., A Generalized Minimal Residual Algorithm, SIAM J. Sci. Stat. Comput.,vol. 7, pp. 856-869, 1986.
17. Barszcz, E., Weeratunga S. K. and Meakin, R. L., Dynamic Overset Grid
Communication on Distributed Memory Parallel Processors, AIAA-93-3311, 11th
AIAA CFD Conference, Orlanda, Florida, July 1993.
18. Geist, A. et. al., PVM 3 User's Guide and Reference Maual, ORNL/TM-12187, May,
1993.
19. Stone, H. L., Iterative Solution of Implicit Approximations of Multi-dimensional
Partial Differential Equations, SIAM J. Num. Analysis, 5(2), 530-559, 1968.
20. Anderson, D. A., Tannehill, J. C., and Pletcher R. H., Computational FluidMechanics and Heat Transfer, Hemisphere Publishing Corp., NY, 1984.
21. CMMD User's Guide, Version 3, Thinking Machines Corporation, Cambridge,
Massachusetts, May 1993.
31
Table 1.GSL, HP, 200x200, 6 processors, 6 sub-domains in y,
2370 iterations.Procs Timer for
FPOsTimers for communications
#1 #2 #3 #4 #5 #6 #7 Total1 73.82 0.27 1.28 0.76 0.79 1.37 0.09 4.562 76.11 0.47 2.95 2.12 0.47 3.29 0.14 9.443 73.38 0.51 3.20 1.87 0.68 2.87 0.12 9.254 72.40 0.48 3.24 1.74 0.88 3.02 0.12 9.485 73.46 0.43 3.10 2.24 0.72 3.44 0.18 10.116 71.07 0.35 1.45 0.74 0.85 1.52 0.08 4.99
Table 2.Stones, HP, 200x200, 6 processors 6 sub-domains in y, 690 iterationsProcs Timer for
FPOsTimers for communications
#1 #2 #3 #4 #5 #6 #7 Total1 30.16 0.06 0.33 0.26 0.29 0.52 0.03 1.492 31.54 0.16 0.86 0.64 0.19 0.88 0.07 2.803 30.04 0.16 0.91 0.57 0.28 0.91 0.02 2.854 30.40 0.12 0.72 0.45 0.28 0.85 0.01 2.435 29.76 0.18 0.94 0.47 0.39 0.78 0.03 2.796 30.19 0.14 0.40 0.39 0.14 0.47 0.07 1.61
32
Table 3.GSL, CM-5, 200x200, 6 processors, 6 sub-domains in y,
2370 iterationsProcs Timer for
FPOsTimers for communications
#1 #2 #3 #4 #5 #6 #7 Total1 155.90 0.69 1.06 0.57 15.76 1.05 6.21 25.352 162.72 1.11 1.99 2.42 0.66 2.09 5.71 13.983 155.90 1.12 2.15 1.51 10.08 2.24 5.61 22.704 155.91 1.76 2.09 1.55 8.70 2.18 6.53 22.815 155.96 1.68 2.01 1.53 7.88 2.06 7.44 22.616 148.70 0.69 1.04 0.57 22.00 1.05 8.50 33.85
Table 4.Stones, CM-5, 200x200, 6 processors, 6 sub-domains in y,
690 iterationsProcs Timer for
FPOsTimers for communications
#1 #2 #3 #4 #5 #6 #7 Total1 38.82 0.21 0.31 0.16 5.14 0.31 1.86 8.002 40.35 0.37 0.59 0.86 0.66 0.60 1.68 4.763 39.67 0.37 0.59 0.62 2.37 0.60 1.67 6.224 39.67 0.53 0.62 0.62 2.36 0.61 1.88 6.625 39.69 0.66 0.60 0.50 2.16 0.61 2.17 6.706 38.06 0.21 0.30 0.16 6.30 0.31 2.50 9.77
33
Table 5.GSL, CM-5, 200x200, 6 processors, 6 sub-domains in y,
2370 iterations, with synchronizationProcs Timer for
FPOsTimers for communications
#1 #2 #3 #4 #5 #6 #7 Total1 155.01 0.69 1.06 1.05 0.96 1.05 7.15 11.962 161.74 1.23 1.96 3.09 1.13 2.05 6.94 16.403 155.02 1.17 1.99 2.53 1.12 2.05 6.91 15.784 155.02 1.16 2.00 2.88 1.11 2.05 6.90 16.115 155.02 1.19 2.02 2.64 1.13 2.06 6.89 15.936 148.00 0.69 1.08 0.60 0.98 1.06 7.07 11.48
Table 6.GSL, HP, 200x200, 6 processors, 6 sub-domains in y,
2370 iterations, with synchronizationProcs Timer for
FPOsTimers for communications
#1 #2 #3 #4 #5 #6 #7 Total1 72.89 0.16 1.17 0.61 0.69 1.49 0.18 4.302 75.53 0.35 2.96 1.24 0.92 2.83 0.14 8.443 76.99 0.43 2.73 1.17 0.45 2.62 0.08 7.484 72.70 0.46 2.93 0.96 0.90 2.63 0.12 8.005 73.02 0.39 2.61 1.03 0.80 2.73 0.2 7.756 70.14 0.17 1.10 0.57 0.55 1.56 0.16 4.11
34
Table 7.GSL, HP, 50x50
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 330 3.63 0.01 3.64 1.002 360 1.98 0.47 2.45 1.494 360 1.17 0.71 1.88 1.946 370 0.78 0.86 1.64 2.22
Table 8.GSL, HP, 100x100
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 840 55.57 0.07 55.64 1.002 880 21.88 1.06 22.94 2.434 900 10.76 2.60 13.36 4.166 920 7.39 2.47 9.86 5.64
Table 9.GSL, HP, 200x200
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 2290 541.4 0.21 541.6 1.002 2330 270.5 4.82 275.3 1.974 2350 127.7 10.07 137.7 3.936 2370 76.11 10.11 86.2 6.28
35
Table 10.Stones, HP, 50x50
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 60 0.92 0.00 0.92 1.002 110 1.01 0.18 1.19 0.774 120 0.39 0.31 0.70 1.316 130 0.27 0.27 0.60 1.53
Table 11.Stones, HP, 100x100
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 170 10.77 0.00 10.77 1.002 240 7.61 0.31 7.92 1.364 250 4.23 0.70 4.93 2.186 280 3.33 0.74 4.07 2.65
Table 12.Stones, HP, 200x200
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 520 135.1 0.00 135.1 1.002 580 74.5 1.20 75.7 1.794 630 41.7 2.23 43.7 3.076 690 31.6 2.85 34.4 4.45

36
Table 13.GSL, CM-5, 200x200
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 2290 1443 3.78 1447 1.002 2330 609.7 10.38 620.1 2.334 2350 266.8 25.55 292.4 5.026 2370 162.7 33.85 196.6 7.368 2400 96.68 29.15 125.8 11.5010 2430 57.99 28.86 86.85 16.6612 2450 47.79 31.40 79.19 18.2714 2480 42.75 29.81 72.56 19.9416 2500 36.48 33.93 70.41 20.5518 2530 34.06 33.87 67.93 21.3020 2550 29.03 37.17 66.20 21.8522 2580 29.61 38.35 67.96 21.2924 2610 26.34 39.13 65.47 22.1026 2620 23.46 49.58 73.31 19.7332 2710 21.65 50.93 72.58 19.9364 3040 15.69 93.34 109.0 13.27
Table 14.Stones, CM-5, 200x200
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
1 520 176.4 0.94 177.4 1.002 580 99.9 4.11 103.0 1.714 630 54.6 7.35 62.0 2.866 690 40.3 9.77 50.12 3.538 740 32.7 10.13 42.79 4.1412 830 24.8 11.99 36.80 4.8216 930 21.3 14.68 35.98 4.9318 980 20.0 16.75 36.74 4.83
Table 15.Stones, HP, 1024x1024
sub-domains inj
# ofiter
time incomp.
time incomm.
totaltime
speedup
8 4540 5940 989 6929 1.0016 4710 2873 599 3473 2.032 5020 1524 323 1848 3.7564 5470 870 338 1208 5.7

37
0
0
0
0
Figure 1: System matrix for second-order central difference discretization of 2-D Laplacian.
38
. . . . . . . . . . . . . . .
. . . . . . . . . . . . .
. . . . . . . . . . . Task 1
Task 2
Task 3
"Pseudo" boundary nodes for each task
Physical boundary nodes. . .
Nodes internal to each task
Overlap region between sub-domains or tasks
Figure 2: One-dimensional domain decomposition using Schwarz overlap method.

39
ME
UP
DN
RTLF 200
100
200
100
010
010
020
020
Calculation Domain
Overlap Region
Figure 3: Schematic of domain-decomposition and message passing protocol at pseudo or internal boundaries between sub-domains.