physical / network topology:
TRANSCRIPT
د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
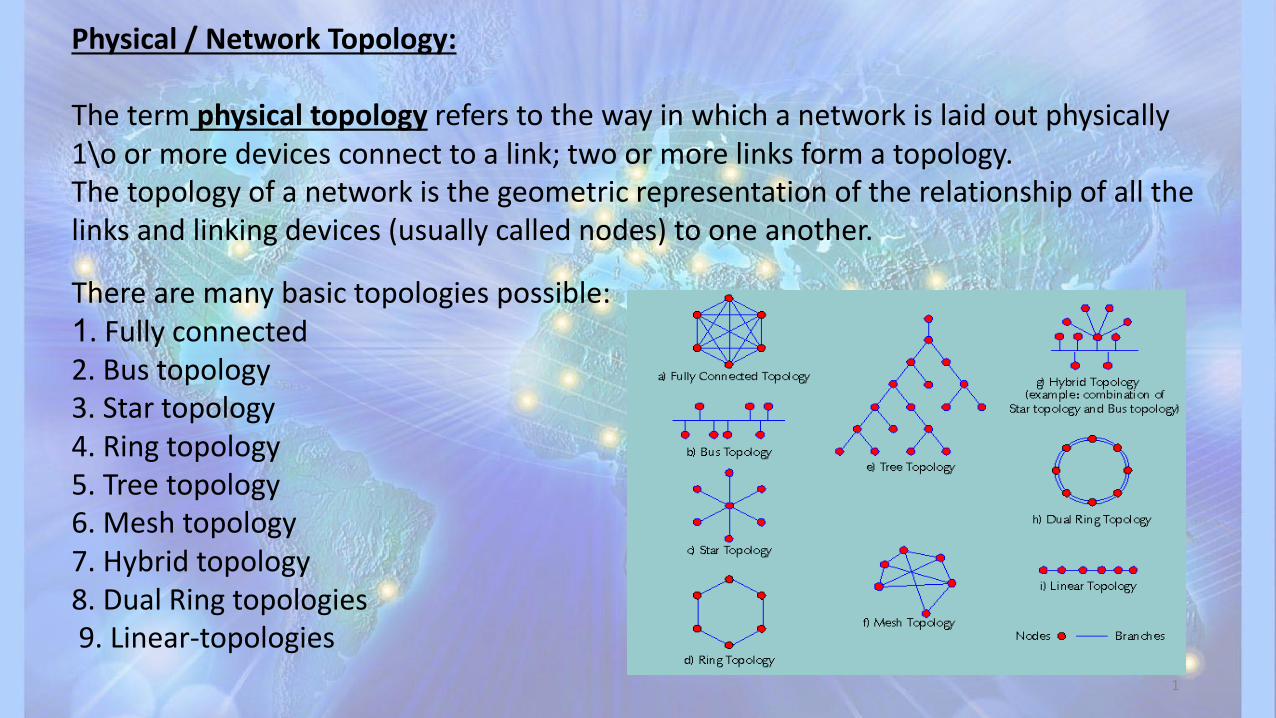
Physical / Network Topology:
The term physical topology refers to the way in which a network is laid out physically
1\o or more devices connect to a link; two or more links form a topology.
The topology of a network is the geometric representation of the relationship of all the
links and linking devices (usually called nodes) to one another.
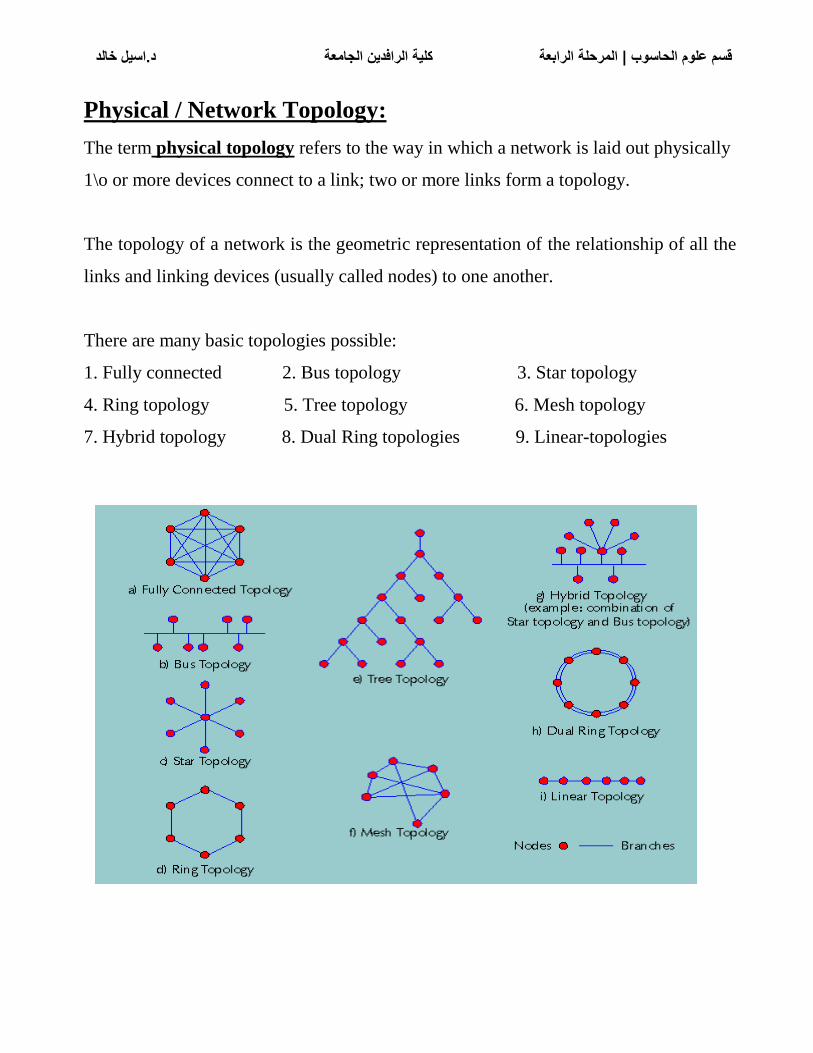
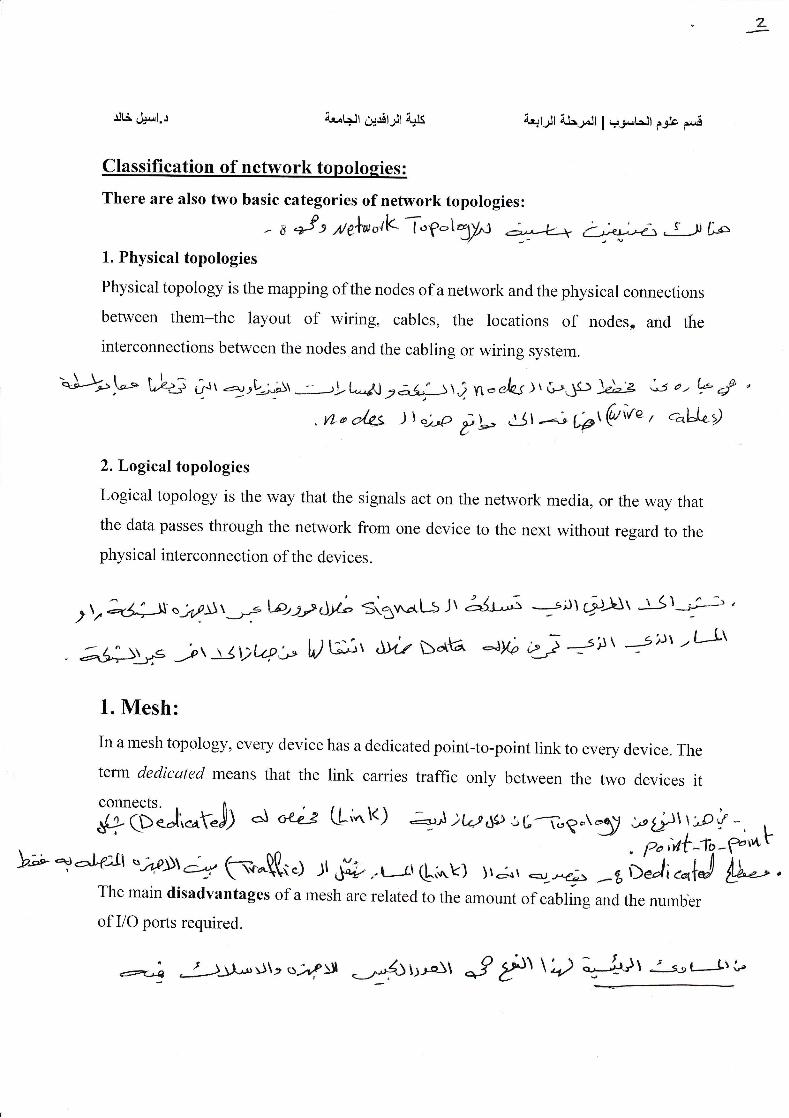
There are many basic topologies possible:
1. Fully connected 2. Bus topology 3. Star topology
4. Ring topology 5. Tree topology 6. Mesh topology
7. Hybrid topology 8. Dual Ring topologies 9. Linear-topologies

د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
Classification of network topologies:
There are also two basic categories of network topologies:
1. Physical topologies
Physical topology is the mapping of the nodes of a network and the physical connections
between them–the layout of wiring, cables, the locations of nodes, and the
interconnections between the nodes and the cabling or wiring system.
2. Logical topologies
Logical topology is the way that the signals act on the network media, or the way that
the data passes through the network from one device to the next without regard to the
physical interconnection of the devices.
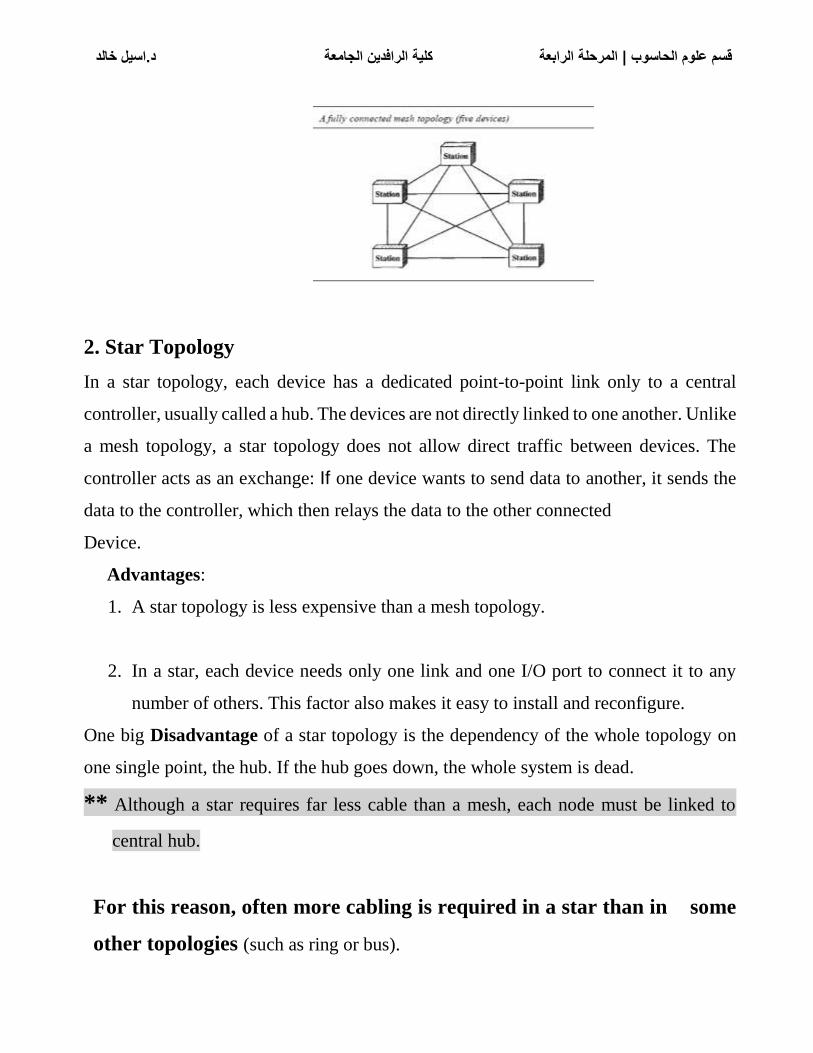
1. Mesh:
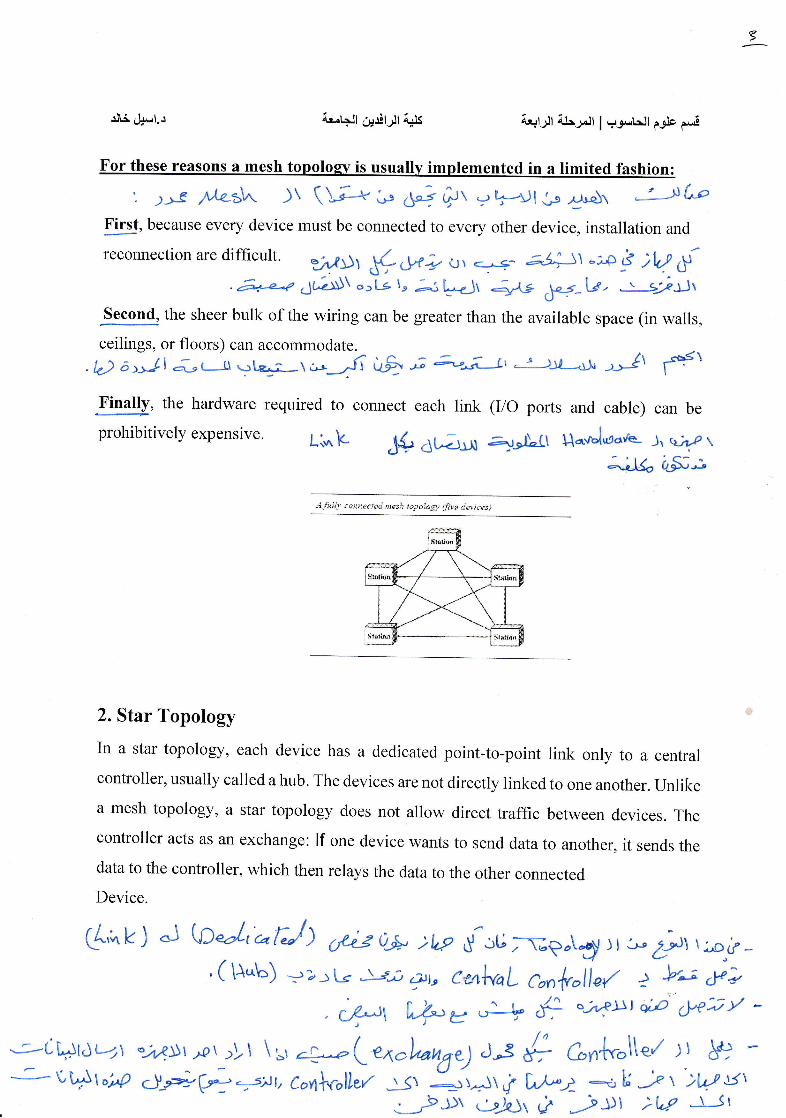
In a mesh topology, every device has a dedicated point-to-point link to every device. The
term dedicated means that the link carries traffic only between the two devices it
connects.
The main disadvantages of a mesh are related to the amount of cabling and the number
of I/O ports required.
For these reasons a mesh topology is usually implemented in a limited fashion:
First, because every device must be connected to every other device, installation and
reconnection are difficult.
Second, the sheer bulk of the wiring can be greater than the available space (in walls,
ceilings, or floors) can accommodate.
Finally, the hardware required to connect each link (I/O ports and cable) can be
prohibitively expensive.
د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
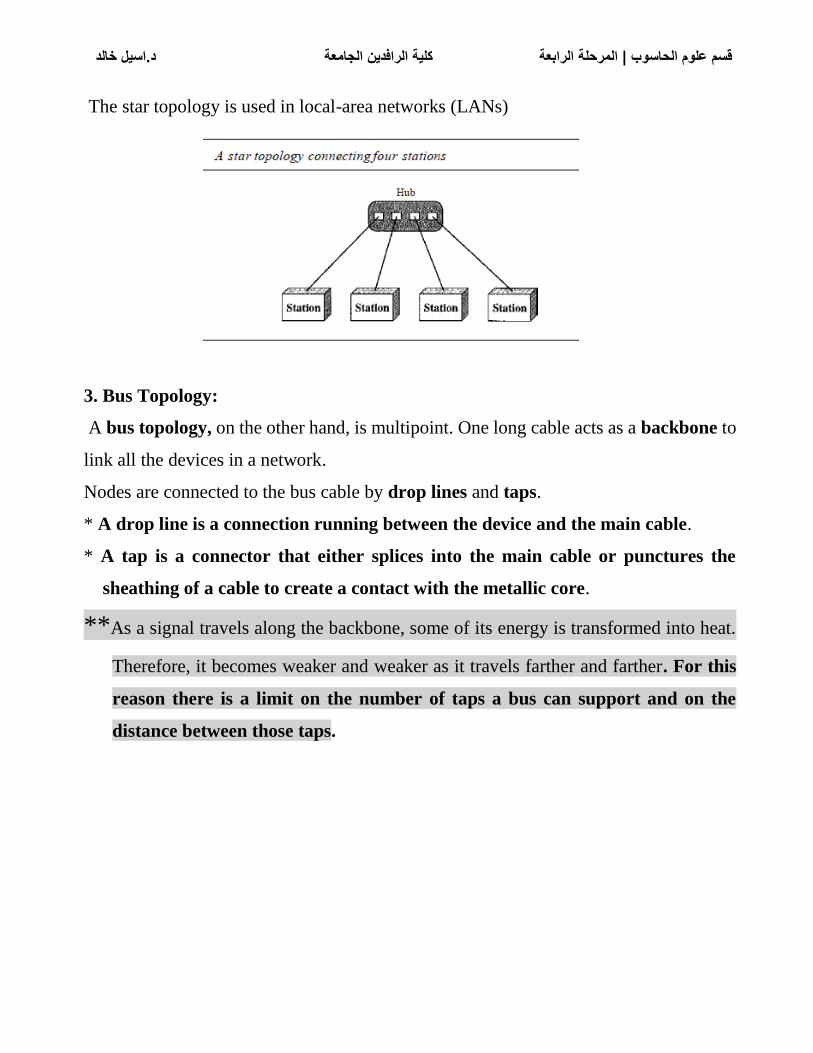
2. Star Topology
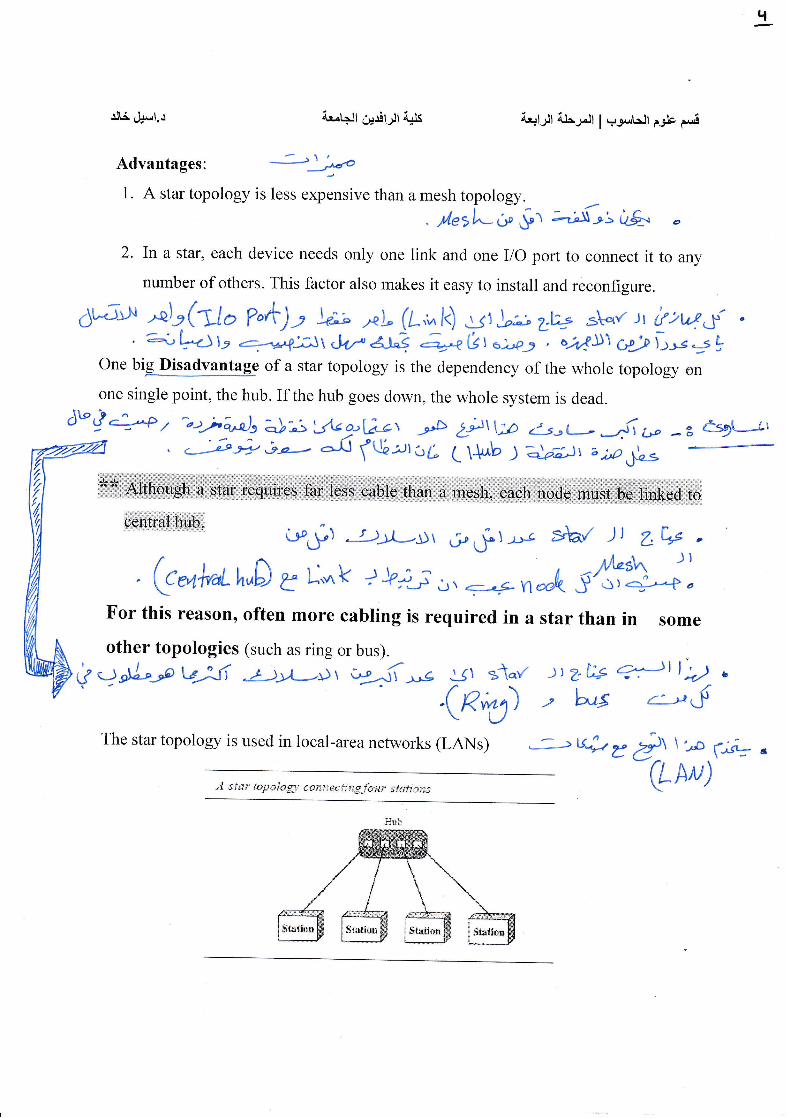
In a star topology, each device has a dedicated point-to-point link only to a central
controller, usually called a hub. The devices are not directly linked to one another. Unlike
a mesh topology, a star topology does not allow direct traffic between devices. The
controller acts as an exchange: If one device wants to send data to another, it sends the
data to the controller, which then relays the data to the other connected
Device.
Advantages:
1. A star topology is less expensive than a mesh topology.
2. In a star, each device needs only one link and one I/O port to connect it to any
number of others. This factor also makes it easy to install and reconfigure.
One big Disadvantage of a star topology is the dependency of the whole topology on
one single point, the hub. If the hub goes down, the whole system is dead.
** Although a star requires far less cable than a mesh, each node must be linked to
central hub.
For this reason, often more cabling is required in a star than in some
other topologies (such as ring or bus).
د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
The star topology is used in local-area networks (LANs)
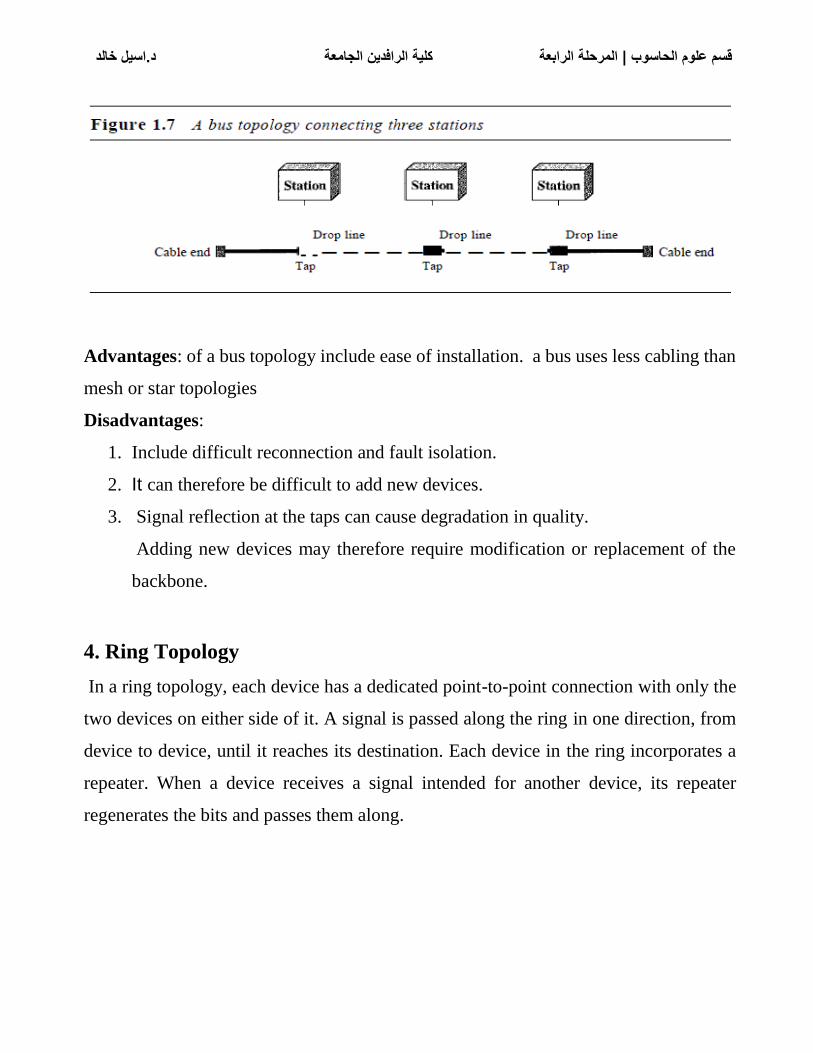
3. Bus Topology:
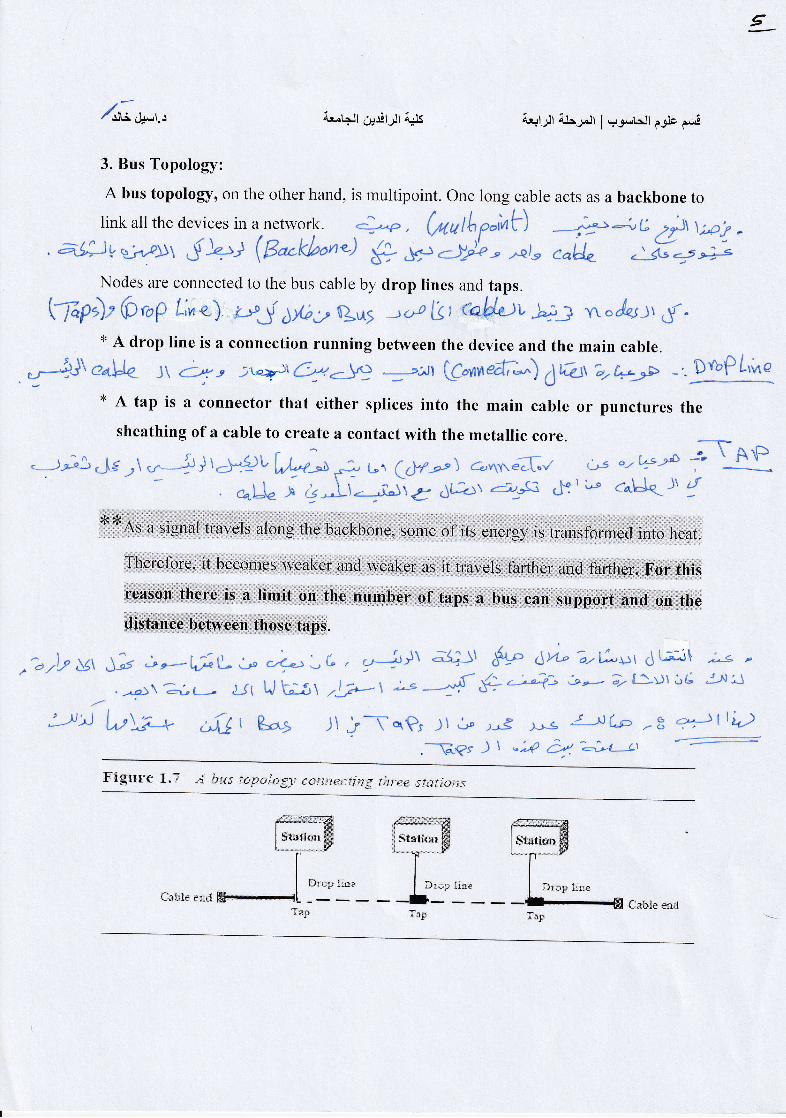
A bus topology, on the other hand, is multipoint. One long cable acts as a backbone to
link all the devices in a network.
Nodes are connected to the bus cable by drop lines and taps.
* A drop line is a connection running between the device and the main cable.
* A tap is a connector that either splices into the main cable or punctures the
sheathing of a cable to create a contact with the metallic core.
**As a signal travels along the backbone, some of its energy is transformed into heat.
Therefore, it becomes weaker and weaker as it travels farther and farther. For this
reason there is a limit on the number of taps a bus can support and on the
distance between those taps.
د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
Advantages: of a bus topology include ease of installation. a bus uses less cabling than
mesh or star topologies
Disadvantages:
1. Include difficult reconnection and fault isolation.
2. It can therefore be difficult to add new devices.
3. Signal reflection at the taps can cause degradation in quality.
Adding new devices may therefore require modification or replacement of the
backbone.
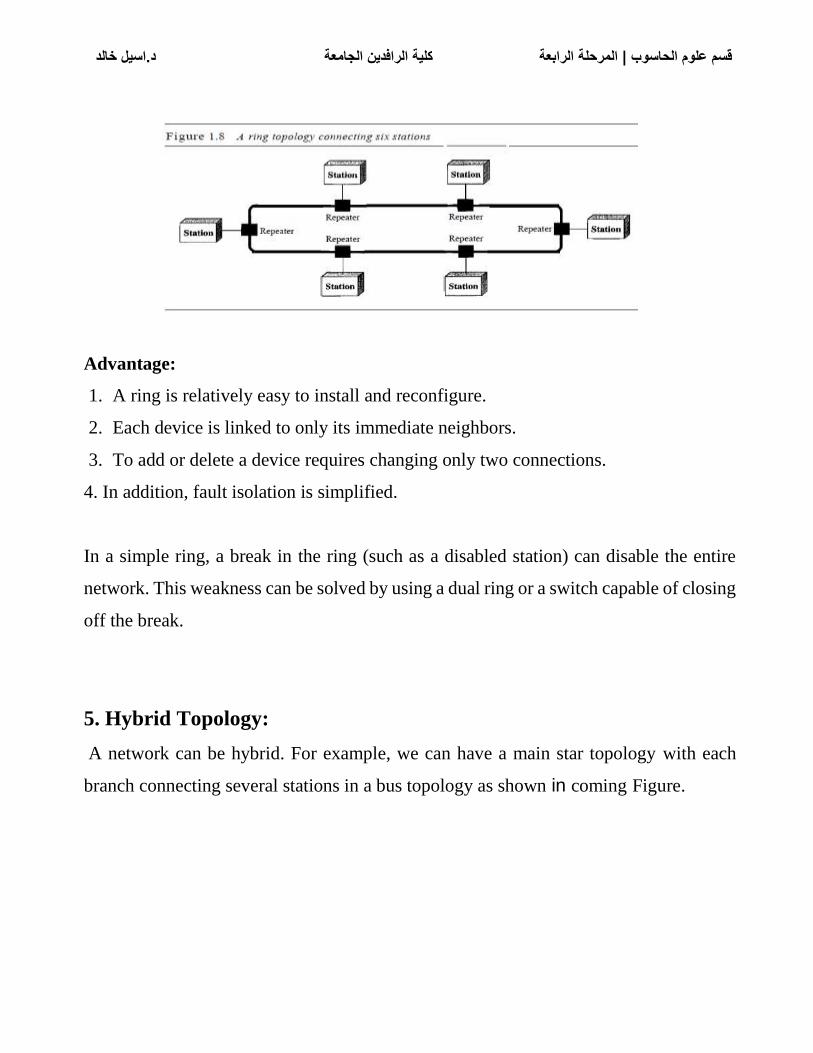
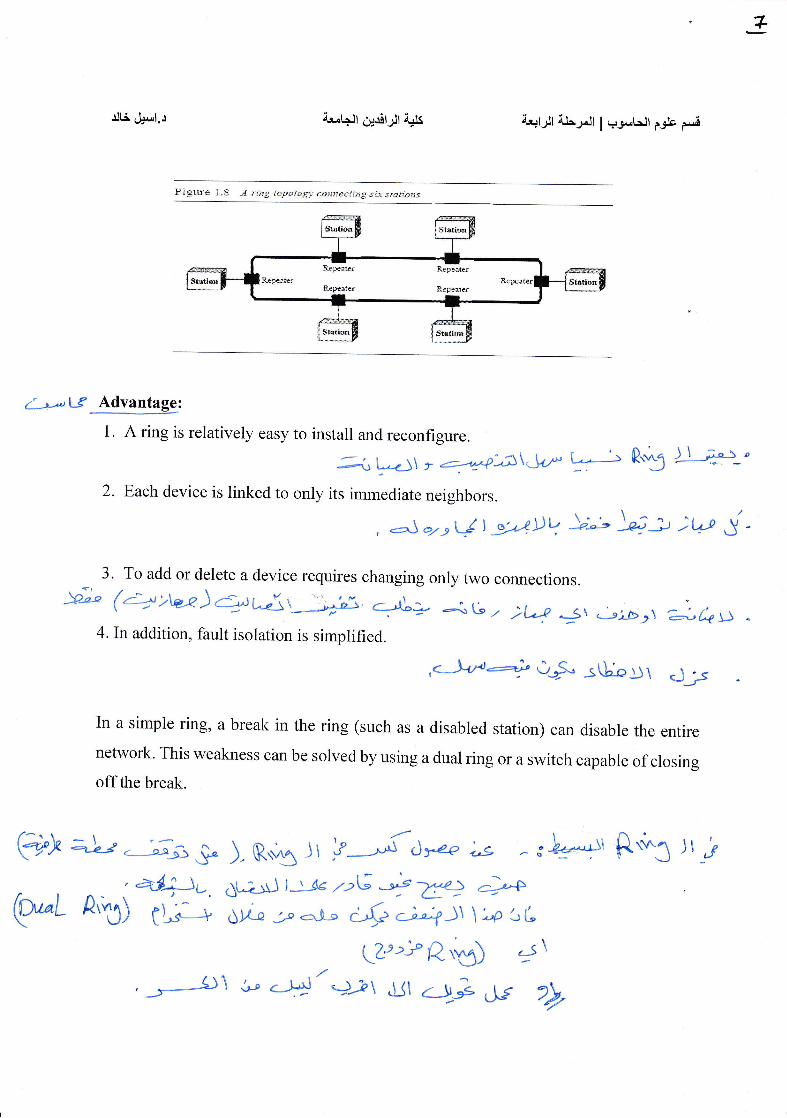
4. Ring Topology
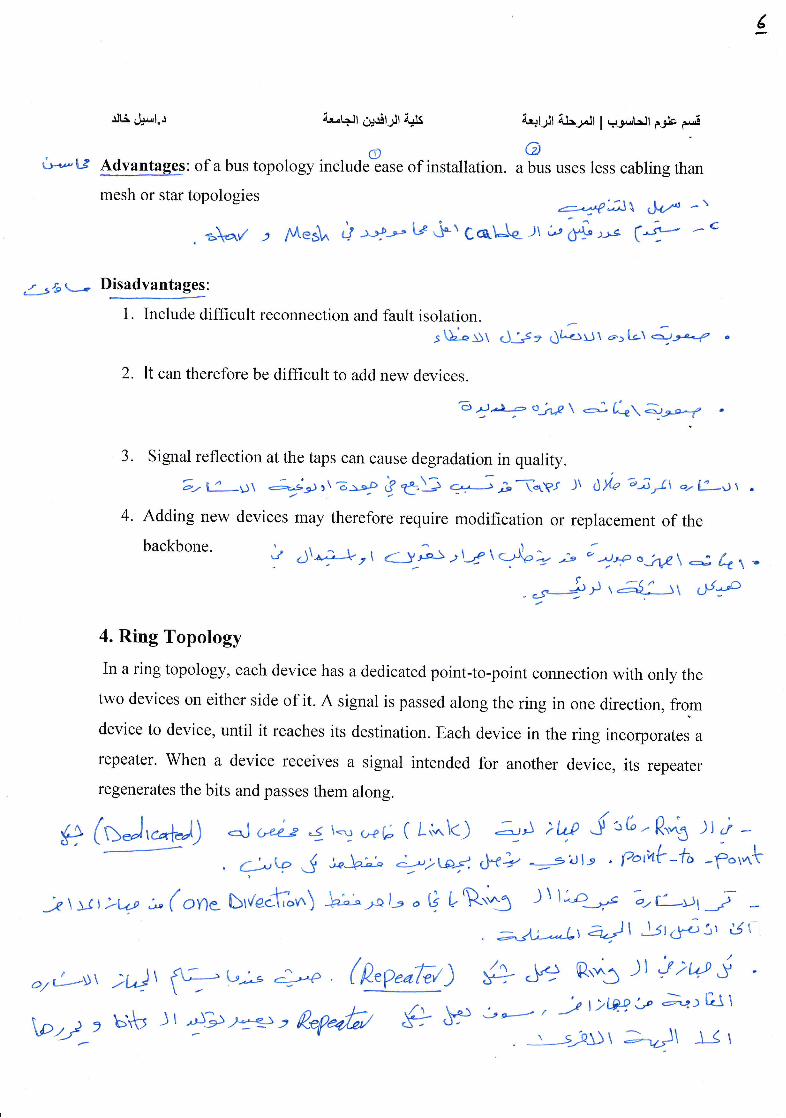
In a ring topology, each device has a dedicated point-to-point connection with only the
two devices on either side of it. A signal is passed along the ring in one direction, from
device to device, until it reaches its destination. Each device in the ring incorporates a
repeater. When a device receives a signal intended for another device, its repeater
regenerates the bits and passes them along.
د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
Advantage:
1. A ring is relatively easy to install and reconfigure.
2. Each device is linked to only its immediate neighbors.
3. To add or delete a device requires changing only two connections.
4. In addition, fault isolation is simplified.
In a simple ring, a break in the ring (such as a disabled station) can disable the entire
network. This weakness can be solved by using a dual ring or a switch capable of closing
off the break.
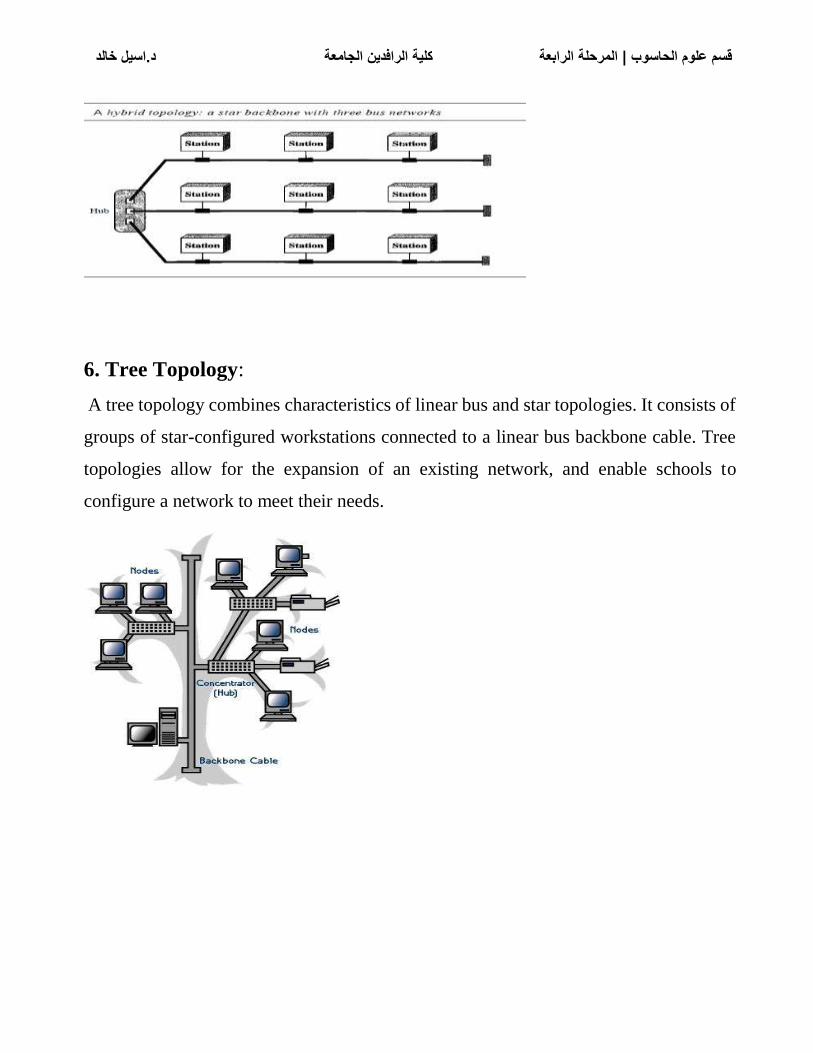
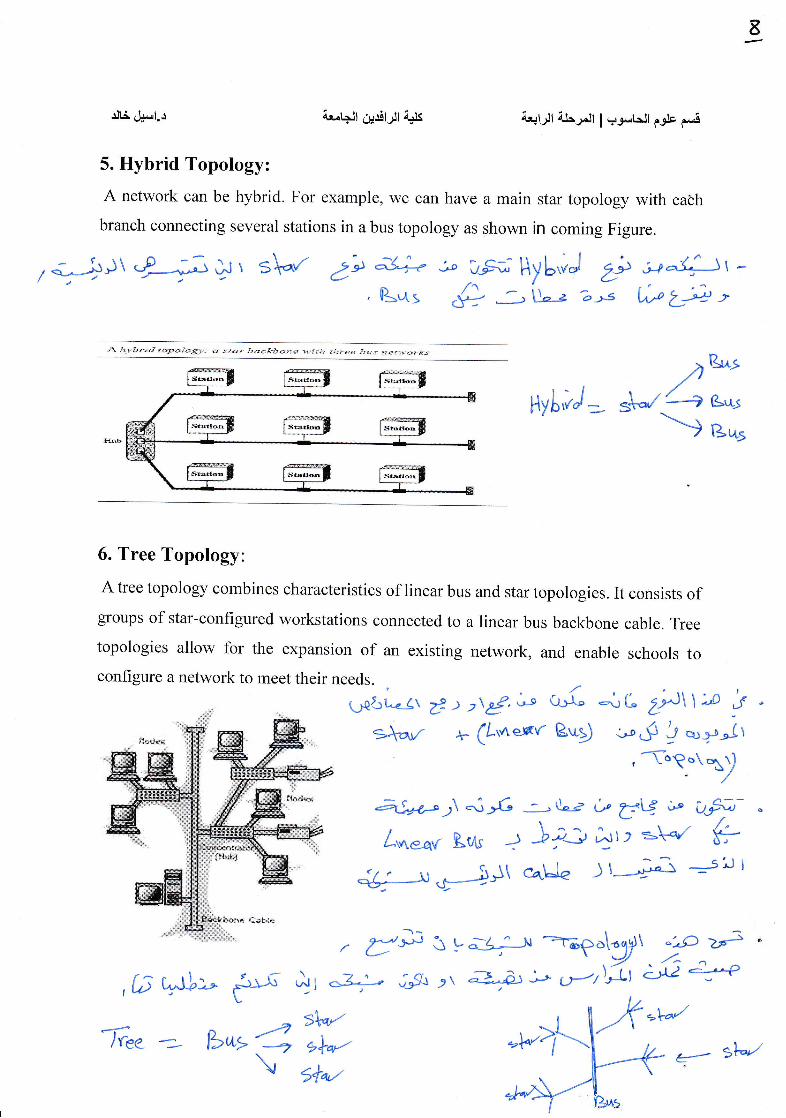
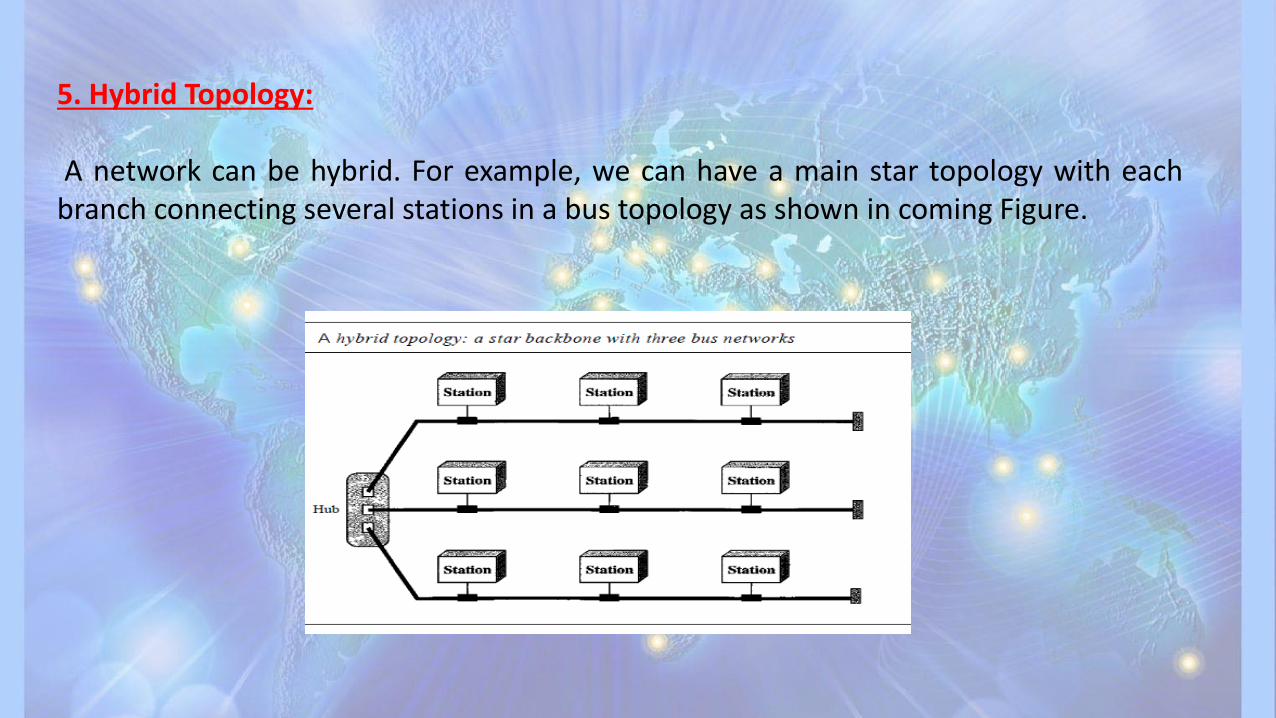
5. Hybrid Topology:
A network can be hybrid. For example, we can have a main star topology with each
branch connecting several stations in a bus topology as shown in coming Figure.
د.اسيل خالد كلية الرافدين الجامعة قسم علوم الحاسوب | المرحلة الرابعة
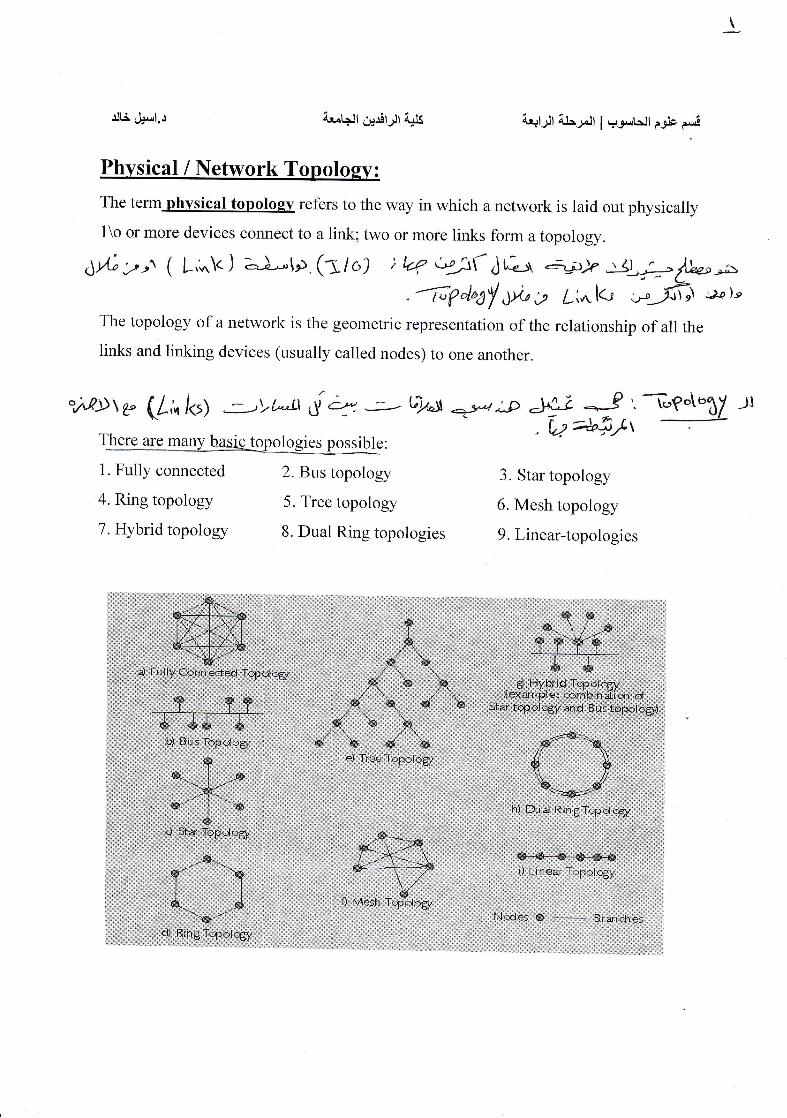
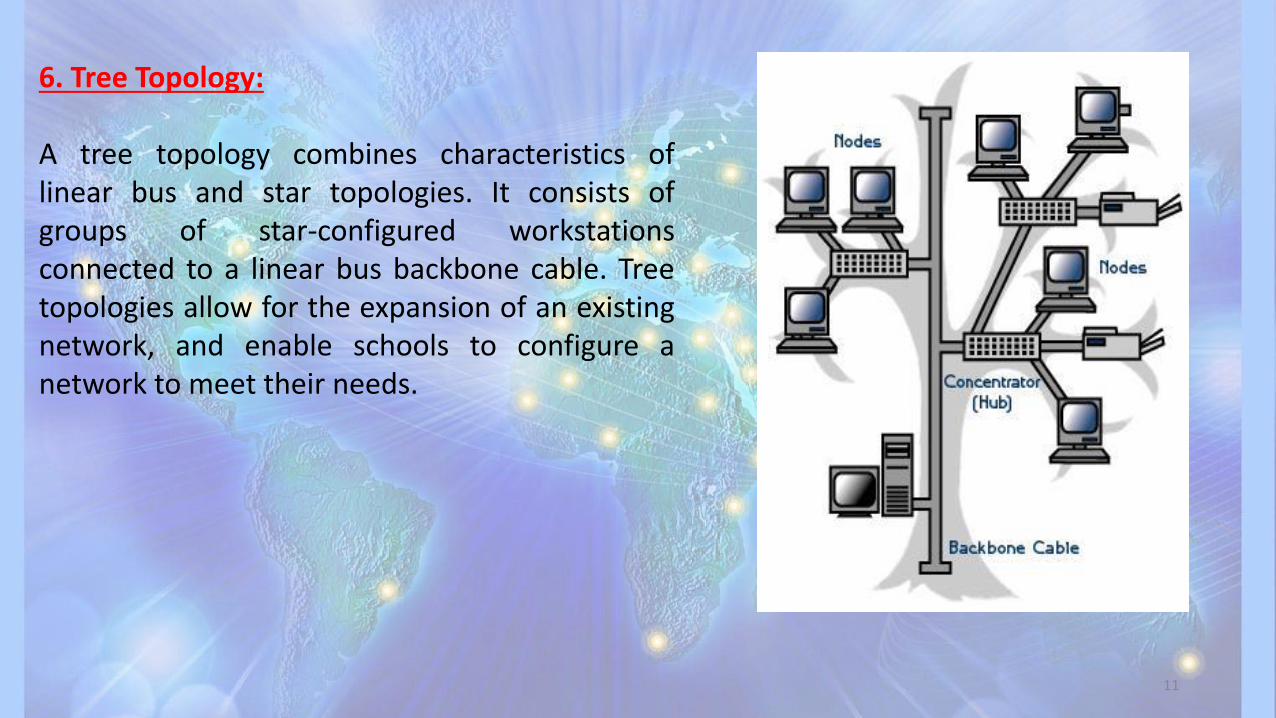
6. Tree Topology:
A tree topology combines characteristics of linear bus and star topologies. It consists of
groups of star-configured workstations connected to a linear bus backbone cable. Tree
topologies allow for the expansion of an existing network, and enable schools to
configure a network to meet their needs.
\
$13, cLr*|..t ir-btt g,rlit;rll{$ e+t.rt ;.Urrtl I r-r. 3rutrll rufr n"e
Phvs I / Network Topolosy:
The term phvsical topoloey refers to the way in which a network is laid out physically
1\o or more devices connect to a link; two or more links form a topology.
,)fr ?) ( Lut ) ;)'-"lo (lt") ) t€ $, irr.)t^.rr alJrk r 41.-b />"--j.- Gp"teA/ ,Sx, u Ll* lo u;ff5 rolo
The topology of a network is the geometric representation of the relationship of all the
links and linking devices (usually called nodes) to one another.
",/4.4)\ g," Uir /o) , - ,)t -,ts
There are
1. Fully connected 2. Bus topology 3. Star topology
4. Ring topology 5. Tree topology 6. Mesh topology
7. Hybrid topology 8. Dual Ring topologies 9. Linear-topologies
es possible: -W-*gS1
-
$ffi t1
EcteU
Tree
ffi L i::diii
ul ni ic Tcpp,lffi
Z
.tJti,,Jfgl.l ir-q.:t ,;ul-rll{$ a+tJti.:-r.tl | +.yr-JltJJ, f-
Classification of network topolosies:
There are also two basic categories of network topologies:
- t +3: ,ttelwol<-l"g*la/ts ;j-+-+ ,-;ry.-drl_-x t"'1. Physical topologies
Physical topology is the mapping of the nodes of a network and the physical connections
between them-the layout of wiring, cables, the locations of nodes, and the
interconnections between the nodes and the cabling or wiring system.
\}-Ir.U= U".-; ti-rr o,rL;;1 - ,tL-x r;G:' ,,r j no olU :\ 6-.,J(.> >>Z ,-r a- ,n,! ,
, rt, el-es ) | d.e t L, JJt --.9 ;nr,@ire r ca&.)
2. Logical topologies
Logical topology is the way that the signals act on the network media, or the way that
the data passes through the network from one device to the next without regard to the
physical interconnection of the devices.
S\23.$o.fs)\----*Lauldy'- Si3,uls )\ tJ-,a -ii)tqPA\ r (1 'j:-jr '
. 5;&)-.,---p\ jJ Vt4J' Ur$, Jr'w b'*a aye *; --u\ J,J\ -'LJt
1. Mesh:
In a mesh topology, every device has a dedicated point-to-point link to every device. The
tetm dedicated means that the link carries traffic only between the two devices it
VflO;"t*fJ a oui Qlnk) -; )w,J..r[-T,q,\-3) i"ty\\.py -. L. p,,Vf-Q-pt t t
Ei 1-ta:tl "r*)\i+ (T*-qk.) Jr ,8, rt*L\et*k) )r-,r a.-<i> _LD;i *,+J 'U^.-
.The main disadvantages of a mesh are related to the amount of cabling and the numberof I/O ports required.
*4 - : >-Y..-J\: s-}f\ll 4J rr+c\\ 3 ti, \ L2 i .ial \ -*.sr Lr {,,
7
Jti j;-1..t
For these
ir-h:t 4$t;ti.,!s a+t-rt A.lr"tl I cr..j*.,1:,!l elb ed
a mesh topolosv is u implemented in a li fashion:
'. )>s zr,lz-etr )\ (p*,!" 64 Cr .=a h-Ullr /.rd\ -:-]("rcIggrf, because every device must be connected to every other device, installation and
reconnection are difficult. ga,f$r # ryr+ ur <:_s^ J'J,^ \\.i'o d )W (y.A4--e-e.-1uLl$\ a2ls\, 2-,b*Jr .=iJ.g 6o-s-A, --. -Si$l
Second, the sheer bulk of the wiring can be greater than the available space (in walls,
ceilings, or floors) can accommodate..lD 6rrJ l{,t-rt u:te3i-\ *j Uq,,i a'-e-LL ' I Lr/ ,rtr ,tlt t'=t'frr4lI, the hardware required to connect each link (I/O ports and cable) can be
prohibitively expensive. Ll*lc .$6 at-.r.1 arJt(\ [-,mluo/e- ir qjr,p r4)9," i;r$;
-{.liiiir, rar;r*rirrd ri$Jn i$ircia:l' l.li:}r .,idr,ir-rT l
2. Star Topology
In a star topology, each device has a dedicated point-to-point link only to a central
controller, usually called a hub. The devices are not directly tinked to one another. Unlikea mesh topology, a star topology does not allow direct traffic between devices. The
controller acts as an exchange: If one device wants to send data to another, it sends the
data to the controller, which then rerays the data to the other connected
Device.
6,aU) J lD*l,at;/) ow 0* ;W..["urG,E,\g )r :.,., Z:)\\ j,o.d-,(u"h1 :. i> rs _v;
^," cwkaL conlrolin( ? ,b;-; cy4s
,cr?\ Wg, # ,f oi(D1 o;oii1'r"Y -
\->LLrJrJr-rt .2r,,($r .ro\ )rl \ u +(rn.)*u6g # * (,n{-t\ e/ )} }9*- tta)t,ie ,)*We-sNb Conhroll.er' \ <1 !rr^!r i lb; +, k *.p\")b.!g\
i-PJ)t r.-:-kjr rf .-.:-Dt )W -Ut
Srrriffi
6tetar! St{1ion
Sirlion ,ilrlirlr!
tl
,tI3, df*1..t Ar-btt g",,$tjl{s +1t.,1t;.t -l.Jl I +_ryt-Jt e.9Jo rd
Advantages: -----:)wn1. A star topology is less expensive than amesh topology.
' /e/'- J Ut :;rt': q4: o
2. In a star, each device needs only one link and one I/O port to connect it to any
number of others. This factor also makes it easy to install and reconfigure.
dtJ$ ,q)r(rlo ?"fr): W /eL (L*l<) yr L;Lt+.s\"4yl st t/2w,f o
' -4 ?<Sl, a-<*,+: \ <h/ eW 4-e Gt u:ps . {ytD\ c,o-.p \:-* * *Or. brg-Di!3drur!3gg of a star topology is the dependency of the whole topology on
one single point, the hub. If the hub goes down, the whole system is dead.
db t! -L..r -g *gL-o,/ 'tr),ade -):i *:,Wr -,D gttp *-t* *,rfi *. .5-t4,?z- Jt fU u jL ( \+r,b ) *ilt b),o J;e_s
(rrf1 -Dsl-.g\ &,)-, r-, >\7 )t ZV
G*MhrD E L..nk ) h;;j, r- .,a n,r&. s/l/lril )\'*rl d1,-.> ,
For this reason, often more cabling is required in a star than inother topologies (such as ring or bus).
V 9 rL-o uX bs,L*$ t +-i r,t JJ1 si.v/ St VLS a*-st S
-(PV) 2 b"s c*"rfThe star topology is used in local-area networks (LANs) ,_I--_-> U;_/ f
a
some
,2 b
, { s aoi' ing+io.E"r i. ni:rIar ti lryr_I,ra:.r. s rn lic;t ;
p;A \ ',o r*+- "-G AN)
:,. !
$t$$nn .tlntiun ;$l*trirrn, ,tt:lliun
5
y'rs*,7*t.t i,-Hr gs$t1rq:s +r;t_;tlfr,31 | ,-r. j*LJt tJb f-
3. Bus Topology:
A bus topology, on the other hand, is multipoint. One long cable acts as a backbone to
link all the devices in a nerwork. -i * , OAutLpi*l) -+'AG 2p\ \ro,? .. -19tke-,?p))\ Jlrl (B".kbor) #.r*, c$e a), caA< afto*
Nodes are connected to the bus cable by drop lines and taps.
\fipr)t6*P l,Ne) rij )/iuB,.t: -tctotg ra$asL E) rt.J<;sr g'.* A drop line is a connection running between the device and the main cable.
y-4} a4V<- )\ *: ir*Ipt q-E *=:ut @arvrad^{ dbrr,c,*}D -.. gtplrvro
* A tap is a connector that either splices into the main cable or punctures the
sheathing of a cable to create a contact with the metallic core.
.E -,\fJ\-51Pt Ub.i, ur (,jr-") r-nn4v (5s o74s:6 i&gc"t\e i A-Ll---;"i f fl2:r a"ss ,J: ' b d''Ltra )\ 6
.1,rl2v\ $,. r,"-1WU-'o cr<DJG , y*+lt ;l? rr ,f!- dn-Z'lLvr dl;i\ ;'s P
.-.r)\ zit - ur U L,gr ,J?-\ :--s -1 {')"-i- Js'- tt:ul 16 '1'n11
-L)tJ lrV-q- 6i1 t |"9-9 )\ J-f epr Jt.,, uE )+s Z)rLe -u o+tt,.).--V:?s-)\ -kal{l ct
F i gtt f ' e 1 . 7 -d & rs f ,:,rr ri'og;.-I, r- 6,,t i; Cr: li i,:;y rjli,L, .,,r,-r,,,,r-, i i j
Statirrrr
.t]r'cp line $ssp liue Dlrp 1rr:e
St*ti*u ,Statlun
{ able e:r*i
Top x*Ft-.1L]lf etlal
between those
g.
rJtf' dr-l.s ir-Ht oi$ull4g a+t_!ti.Lrr.lt I +.xr-Jl eJb r"6
Ll-,.s'Lg Advantages: of a bus topology include?ase of installation. ubCIr, uses less cabling than
mesh or star topologies a--r?'-JJ\ &,r" - t
Z.: 6 \* Disadvantages
1. Include difficult reconnection and fault isolation.,U,ost ,Jlz dLou\ -51-c\ 4."-r
2. lt can therefore be difficult to add new devices.
6 lrL--- o3ye \ -f G1 Zt-.5ro--1
3. signal reflection at the taps can cause degradation in quarity.
5. I n --.9\ a:s:r\ z)s-D I *\; ?*---.& -T.tpJ J\ dYa ?;rI\ o,. I-1J r .4' Adding new devices may therefore require modification or replacement of the
backbone' ! d\^;-* ,\ <-y_fu s\t\ c+ -y * J 4* 6j\e\ :: e t -
r6-+ ! rE j---l\ ,Y:P
4. Ring Topology
In a ring topology, each device has a dedicated point-to-point connection with only the
two devices on either side of it. A signal is passed along the ring in one direction, from
device to device, until it reaches its destination. Each device in the ring incorporates a
repeater. When a device receives a signal intended for another device, its repeater
regenerates the bits and passes them along.
$) (sJ,,^1J) -J Grz-e {\- ,+t- ( Li^\<) :+ ,4, S rG-B.g )l ,r -, ()V 3 ubL +-2t@?., N> - ''*)t-s ' fovtt-f' -p"tnt
*r \ rJ | >14 -' ( one br/eff.,n') }1,;/o l- . Q L R'11 )\ \la-,s Zrt*r;1 jI J-Er.y3 5, ui \:ra--*.Lr 4)
o.i--t>t ;Gt fl-- u;s I "e , (p",p*Er) #+ .l+ Ra3 )t J 2w S
J- o---- , -2 l
'qC." ;{) f,J I
. . thj) \ =-v;\ -l_J rVrj , b'.b J\ '-E),*), Q"{qbl 9 .}P
?
Jt-i..!-l.l ir-r-tt c;$tjl41ts {r1t1A.:.r.:l t ir3*LJle_rb fd
Figtl1.e I . g -{ r;rrg ts,r;&lot]| [rrr]|6.rlll.f,, :iil: jlrliirEs
/-)--,Lg Advantage:
1. A ring is relatively easy to install and reconfigure.
ZrL'"r\r -='na43\t!'^" !a--> AY,
2. Each device is linked to only its immediate neighbors.
, :J ur"V I g24DU >; b:t )qJ S -
3. To add or delete a device requires changing only two connections
4. In addition, fault isolation is simplified.
,<_\uad OJi. sUoUt d--"
In a simple ring, a break in the ring (such as a disabled station) can disable the entirenetwork. This weakness can be solved by using a dual ring or a switch capable of closingoff the break.
?/y dG - '.?G & )- Rxl -tr ),:--r*{lrea '.c- ^ s)*,";' RS3 )t ir t r ,a44". dt;rJ f-,-4s zrG €t) -;>+WL RtU) tL,i-rp dx! ;, o.1.-o .t'-* d-:t)\ \:,p 31;
lU,sAq3) -.5\
) \ .i-o-5 p
$tqtiq
9tqtlonREpeitrt
I"e-Feater
Rrjlerter
$i4ti0n St {lr}!
./1 o <J-^l --;-a\ .t3t O? le 2>
I
.tJti c!sl.l {r-htt 6;$r;ri,;Js e+tJ A.:.r*tl I r-,..g*,r!rJlNb e*e
5. Hybrid Topology:
A network can be hybrid. For example, we can have a main star topology with eaoh
branch connecting several stations in a bus topology as shown in coming Figure.
,<J,:t s\*r' Zc -U-< re 7e-q; t\yL,-J Zl i4, [!,^s Q *=U.= z->s t;/
J'r;rl-4 -r
A ]r.t.j} irJ ,:d}J,.r.l{r€i1.. ..r -sr."r I2.?{:,3./rd?:.. 1!.iiir nirn.;i.. &,,.. .rDrii.<,.7-,ks
Hrxt-l
)utllvLinJ - 4*/4u,
6. Tree Topology:
A tree topology combines characteristics of linear bus and star topologies. It consists ofgroups of star-configured workstations connected to a linear bus backbone cable. Tree
topologies allow for the expansion of an existing network, and enable schools toconfigure a network to meet their needs. , . ./
gn8u*er f -> 2\gl. --s qri' *--, G 2r"lll rc b i
*\-t + (L"rtrv' Bui r-.f ! *;"Jt, T"R"\o\.)
'/
4*F2\ -.r;'G ---, to-a t " VsV v W-?- o
Irn.-^q,r Bur + )?i lj'' =\s/ *+-\.r-j;\ c"'tte ) 1- +r;\ .J,J t
11*qies
,i-,::e$t*
U) IJ}/ U'$ 5 y ag j-x '.-6po\a,19\ :D
"; a
\J),1
4r o2*.;$:1 Z,^.D-:u u;rfil ;;-2 +42 t*
-
;kr'*trr
5.1a,/
/Y,v/"
\Tuu : bw>
{ Sl-'.1
.,x
ll,rtJta
.':i
iti;il
fli
lst rt sl
Physical / Network Topology:
The term physical topology refers to the way in which a network is laid out physically1\o or more devices connect to a link; two or more links form a topology.The topology of a network is the geometric representation of the relationship of all the links and linking devices (usually called nodes) to one another.
1
There are many basic topologies possible: 1. Fully connected 2. Bus topology 3. Star topology4. Ring topology 5. Tree topology 6. Mesh topology7. Hybrid topology 8. Dual Ring topologies 9. Linear-topologies
Classification of network topologies:
There are also two basic categories of network topologies:
1. Physical topologiesPhysical topology is the mapping of the nodes of a network and the physical connections between them–the layout of wiring, cables, the locations of nodes, and the interconnections between the nodes and the cabling or wiring system.
2. Logical topologiesLogical topology is the way that the signals act on the network media, or the way that the data passes through the network from one device to the next without regard to the physical interconnection of the devices.

1. Mesh:
In a mesh topology, every device has a dedicated point-to-point link to every device. The term dedicated means that the link carries traffic only between the two devices it connects.The main disadvantages of a mesh are related to the amount of cabling and the number of I/O ports required.
For these reasons a mesh topology is usually implemented in a limited fashion:First, because every device must be connected to every other device, installation andreconnection are difficult.Second, the sheer bulk of the wiring can be greater than the available space (in walls, ceilings, or floors)
can accommodate.Finally, the hardware required to connect each link (I/O ports and cable) can be prohibitively expensive.
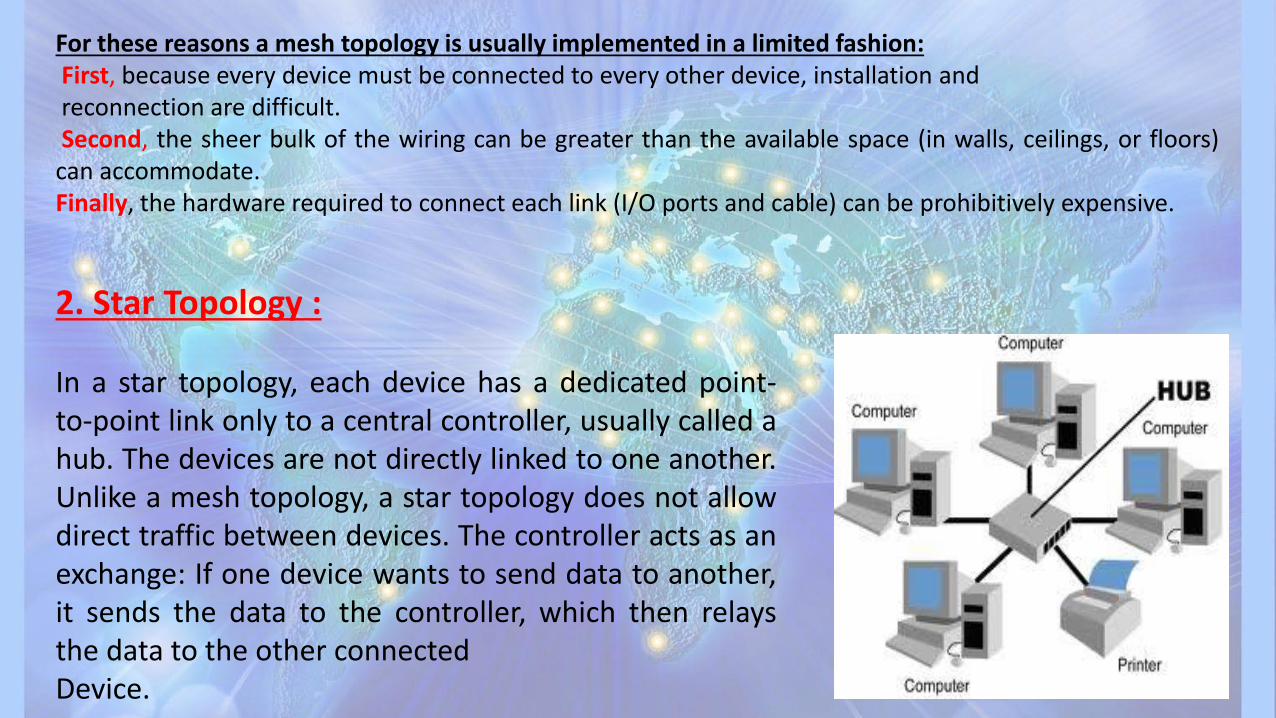
2. Star Topology :
In a star topology, each device has a dedicated point-to-point link only to a central controller, usually called ahub. The devices are not directly linked to one another.Unlike a mesh topology, a star topology does not allowdirect traffic between devices. The controller acts as anexchange: If one device wants to send data to another,it sends the data to the controller, which then relaysthe data to the other connectedDevice.
Advantages:A star topology is less expensive than a mesh topology.
In a star, each device needs only one link and one I/O port to connect it to any number ofothers. This factor also makes it easy to install and reconfigure.
One big Disadvantage of a star topology is the dependency of the whole topology on onesingle point, the hub. If the hub goes down, the whole system is dead.** Although a star requires far less cable than a mesh, each node must be linked tocentral hub.
For this reason, often more cabling is required in a star than in some other topologies(such as ring or bus).The star topology is used in local-area networks (LANs)

6
3. Bus Topology:
A bus topology, on the other hand, is multipoint. One long cable acts as a backbone tolink all the devices in a network.Nodes are connected to the bus cable by drop lines and taps
• A drop line is a connection running between the device and the main cable.
• A tap is a connector that either splices into the main cable or punctures thesheathing of a cable to create a contact with the metallic core
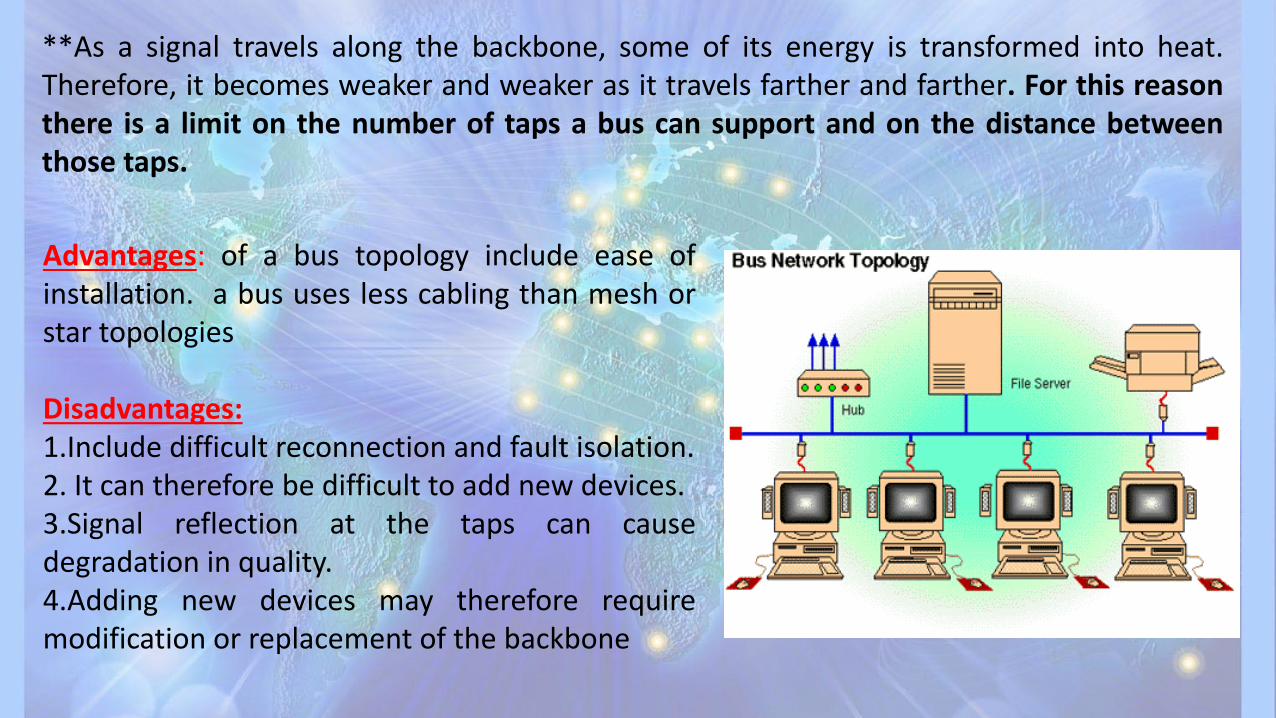
**As a signal travels along the backbone, some of its energy is transformed into heat.Therefore, it becomes weaker and weaker as it travels farther and farther. For this reasonthere is a limit on the number of taps a bus can support and on the distance betweenthose taps.
Advantages: of a bus topology include ease ofinstallation. a bus uses less cabling than mesh orstar topologies
Disadvantages:1.Include difficult reconnection and fault isolation.2. It can therefore be difficult to add new devices.3.Signal reflection at the taps can causedegradation in quality.4.Adding new devices may therefore requiremodification or replacement of the backbone
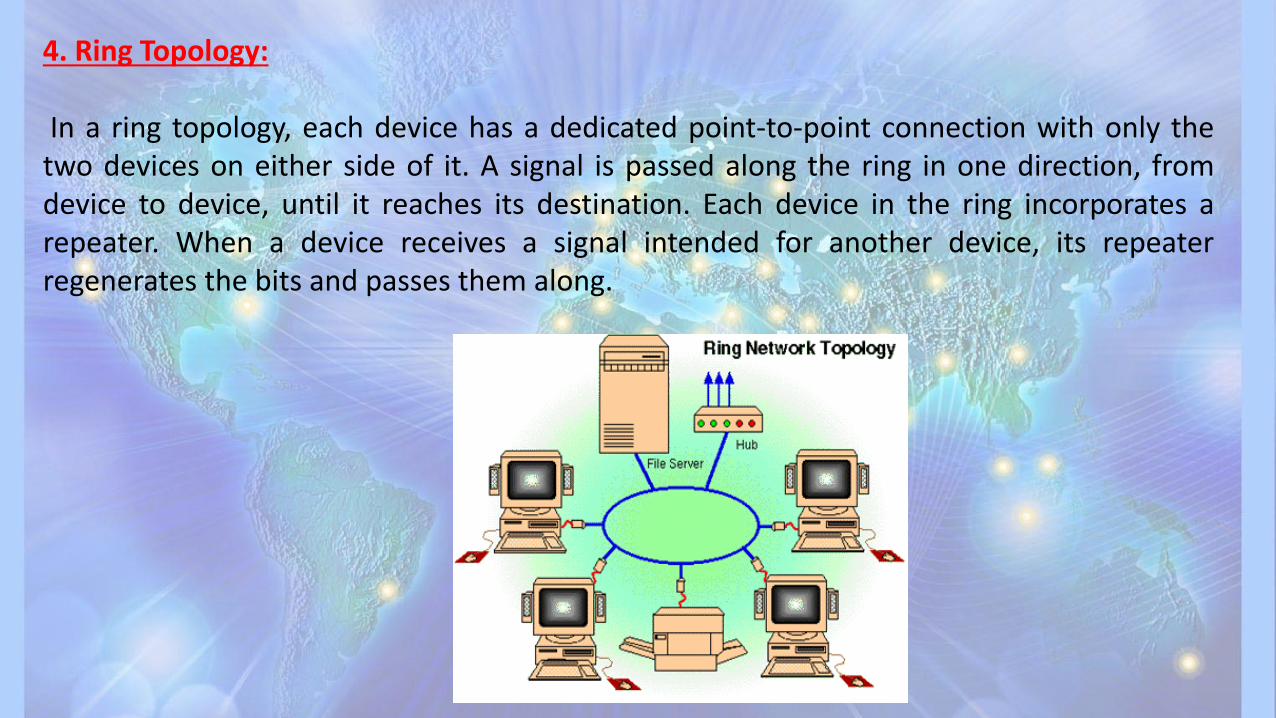
4. Ring Topology:
In a ring topology, each device has a dedicated point-to-point connection with only thetwo devices on either side of it. A signal is passed along the ring in one direction, fromdevice to device, until it reaches its destination. Each device in the ring incorporates arepeater. When a device receives a signal intended for another device, its repeaterregenerates the bits and passes them along.
Advantage:A ring is relatively easy to install and reconfigure.Each device is linked to only its immediate neighbors.To add or delete a device requires changing only two connections.4. In addition, fault isolation is simplified
In a simple ring, a break in the ring (such as a disabled station) can disable the entirenetwork. This weakness can be solved by using a dual ring or a switch capable of closing offthe break
5. Hybrid Topology:
A network can be hybrid. For example, we can have a main star topology with eachbranch connecting several stations in a bus topology as shown in coming Figure.
6. Tree Topology:
A tree topology combines characteristics oflinear bus and star topologies. It consists ofgroups of star-configured workstationsconnected to a linear bus backbone cable. Treetopologies allow for the expansion of an existingnetwork, and enable schools to configure anetwork to meet their needs.
11